Область техники
Настоящее изобретение относится к системе вторичной радиолокации для управления воздушным движением.
Уровень техники
Система вторичной радиолокации включает множество вторичных радиолокационных станций и выполнена с возможностью определения местоположения воздушного транспортного средства в пределах дальности обзора, по меньшей мере, некоторых из вторичных радиолокационных станций. Местоположение воздушного транспортного средства определяется посредством измерения времени распространения сигналов данных, передаваемых между вторичными радиолокационными станциями и транспондером воздушного транспортного средства. С целью обеспечения точного измерения времени распространения, обеспечения сравнения величин времени распространения, измеряемых вторичными радиолокационными станциями, и обеспечения надежного вычисления местоположения воздушного транспортного средства посредством так называемой мультилатерации или процесса гиперболического позиционирования каждая из вторичных радиолокационных станций работает с синхронизированной локальной временной базой.
Время распространения может быть измерено, главным образом, двумя способами. Воздушное транспортное средство транслирует сигнал, который принимается наземными базовыми станциями, которые измеряют разницу времени между моментами прихода сигналов или осуществляют измерение фактического времени распространения переданных сигналов.
Вторичный (обзорный) радиолокатор (Secondary Surveillance Radar, SSR) называется «вторичным» с тем, чтобы отличить его от «первичного радиолокатора», который используется для пассивного отражения радиосигнала от обшивки воздушного транспортного средства, например воздушного судна. Первичные радиолокаторы наиболее эффективны при радиолокации крупных полностью металлических воздушных судов, но менее эффективны при радиолокации маленьких воздушных судов из композитных материалов. Кроме того, дальность первичного радиолокатора ограничена рельефом местности и метеорологическими условиями (например, дождем или снегом), при этом первичный радиолокатор также обнаруживает нежелательные объекты, такие как автомобили, холмы и деревья. Кроме того, не все первичные радиолокаторы способны вычислять высоту воздушного судна. Вторичные радиолокаторы устраняют указанные ограничения, но для обнаружения воздушного судна и определения высоты воздушного судна и другой относящейся к воздушному судну информации требуется, чтобы транспондер, находящийся в воздушном судне, отвечал на специальный опрос вторичных радиолокационных станций, например наземных станций.
Система вторичной радиолокации представляет собой радиолокационную систему, используемую в управлении воздушным движением (АТС, Air Traffic Control), а также системах предупреждения столкновений воздушных судов (ACAS, Airborne Collision Avoidance Systems). Системы вторичной радиолокации не только обнаруживают и измеряют местоположение воздушного судна, но также запрашивают дополнительную информацию у самого воздушного судна, например его идентификатор и высоту. В отличие от систем первичной радиолокации, которые измеряют лишь дальность и направление целей путем обнаружения отраженных радиосигналов, вторичные радиолокаторы используют радиолокационные транспондеры, которыми оснащаются воздушные цели, при этом транспондеры либо передают в определенные моменты времени, например регулярно, сигнал, содержащий закодированные данные, либо отвечают на специальный опрашивающий сигнал, передавая сигнал отклика, содержащий закодированные данные. Указанные закодированные данные используются системой вторичной радиолокации для определения местоположения соответственно транспондера и воздушного судна посредством мультилатерации.
Вторичные радиолокационные станции представляют собой базовые станции, расположенные в определенных фиксированных положениях на земле. Местоположение вторичных радиолокационных станций известно центральному вычислительному блоку, с которым соединены базовые станции, используемые для определения местоположения транспондера и воздушного судна. Система вторичной радиолокации, использующая мультилатерацию для определения местоположения и высоты воздушного судна, требует точной синхронизации локальных временных разверток всех вторичных радиолокационных станций системы вторичных радиолокаторов. В настоящее время используются следующие способы синхронизации для мультилатерации:
- синхронизация посредством внешних часов (режим универсальных часов), в которой сигнал внешних часов, как правило, формируется системой глобального позиционирования (GPS, Global Positioning System) или глобальной навигационной спутниковой системой (GNSS, Global Navigation Satellite System) и принимается приемниками системы GPS или GNSS, предусмотренными во вторичных радиолокационных станциях;
- односторонняя синхронизация посредством отдельного калибровочного передатчика, например посредством высокочастотного (ВЧ) сигнала, излучаемого передатчиком. Вторичные радиолокационные станции расположены в пределах зоны покрытия калибровочного передатчика и могут принимать лишь калибровочные сигналы из калибровочного передатчика и не могут передавать сигналы в калибровочный передатчик. Все вторичные радиолокационные станции, синхронизируемые посредством одного и того же калибровочного передатчика, образуют так называемый кластер. Два кластера связаны между собой таким образом, что одна из вторичных радиолокационных станций принимает калибровочные сигналы из двух или более калибровочных передатчиков, а разница временных разверток двух или более кластеров передается в центральный вычислительный блок. В системах большего масштаба или системах WAM (Wide Area Multilateration, глобальная система мультилатерации) требуемая зона покрытия может превышать зону покрытия одного калибровочного передатчика, при этом необходимы несколько кластеров, каждый со своей собственной временной базой, которые должны быть соединены. Синхронизирующие сообщения, которые служат для синхронизации станций одного кластера, не содержат полезной информации для согласования во времени. Синхронизация осуществляет лишь на основании времени прихода синхронизирующих сообщений, а содержание синхронизирующих сообщений не имеет значения для синхронизации.
В патентных заявках GB 2250154 А и ЕР 0653643 А описаны системы мультилатерации, базовые станции которых подлежат синхронизации. Источниками синхронизации в указанных документах из уровня техники является высокочастотный сигнал. Указанный сигнал содержит идентификатор (ID) базовой станции, передающей сигнал. Принимающие базовые станции направляют в центральный вычислительный блок, с которым соединены базовые станции, идентификатор ID вместе с информацией о времени прихода (Time of Arrival, ТОА) сигнала в принимающую базовую станцию. Заданные местоположения базовых станций известны центральному вычислительному блоку. По идентификатору ID, времени прихода ТОА и положениям базовых станций центральный вычислительный блок определяет сдвиг для внутренних часов различных принимающих базовых станций. Поэтому в известном способе синхронизации для осуществления синхронизации базовых станций необходим отдельный дополнительный центральный вычислительный блок, с которым должны быть соединены все базовые станции. Кроме того, высокочастотный сигнал, используемый для синхронизации системы мультилатерации, не используется для передачи полезных данных о согласовании во времени.
Раскрытие изобретения
Таким образом, целью настоящего изобретения является обеспечение простой и высокоточной синхронизации радиолокационных станций глобальной системы мультилатерации без кластеров.
Для достижения указанной цели в настоящем изобретении предлагается система вторичной радиолокации для управления воздушным движением, содержащая признаки пункта 1 формулы изобретения. В частности, предлагается синхронизировать вторичную радиолокационную станцию системы вторичной радиолокации в зависимости от контента синхронизирующих сигналов, принимаемых вторичной радиолокационной станцией, подлежащей синхронизации, и транслируемых одной из других вторичных радиолокационных станций системы вторичной радиолокации. Конечно, в соответствии с настоящим изобретением могут синхронизироваться более одной вторичной радиолокационной станции, в частности все вторичные радиолокационные станции системы вторичной радиолокации.
В соответствии с настоящим изобретением предлагается использовать сигнал времени или передатчики временного радиомаяка как калибровочные устройства. Сигнал времени или передатчики временного радиомаяка предпочтительно, но необязательно представляют собой, по меньшей мере, одну из вторичных радиолокационных станций системы вторичной радиолокации. В соответствии с предпочтительным вариантом осуществления передатчики не являются отдельными дополнительными аппаратными блоками. Напротив, уже имеющееся в системах вторичной радиолокации аппаратное обеспечение дополнительно используется для осуществления синхронизации вторичных радиолокационных станций. Таким образом, указанные передатчики не только передают произвольный синхронизирующий сигнал, который также включает информацию в полезной части данных, относящуюся к синхронизации принимающую(-их) сигнал вторичной(-ых) радиолокационной(-ых) станции(-й) и обеспечивающих ее. Синхронизирующий сигнал предпочтительно состоит из пакетов данных и, в частности, включает информацию, указывающую на время передачи синхронизирующего сигнала.
Важное отличие предлагаемой системы вторичной радиолокации от традиционных систем мультилатерации, известных из уровня техники, заключается в следующем. В традиционных системах используются синхронизирующие сообщения, передаваемые своими собственными или внешними приемопередатчиками. Данные, содержащиеся в этих сообщениях, используются для идентификации только источника, но не содержат какой-либо полезной информации, которая может быть непосредственно использована для самой операции синхронизации. В соответствии с настоящим изобретением в сигнале передается информация, указывающая на время передачи синхронизирующего сигнала. Это позволяет принимающим базовым станциям автономно синхронизировать свои часы местного времени. Отдельный дополнительный центральный вычислительный блок для синхронизации базовых станций системы вторичной радиолокации не требуется. В соответствии с настоящим изобретением дополнительные данные, передаваемые в сигнале, встроены в сам сигнал и могут быть непосредственно использованы для синхронизации без необходимости запроса другой информации из других внешних подсистем. Синхронизация вторичных радиолокационных станций может быть осуществлена в каждой из станций, принимающих синхронизирующий сигнал. Это означает, что в соответствии с настоящим изобретением синхронизация системы мультилатерации не требует дополнительного внешнего вычислительного блока и линий передачи данных, соединяющих базовые станции с вычислительным блоком.
Следовательно, настоящее изобретение обеспечивает более гибкую структуру системы WAM/мультилатерации. Напротив, традиционные системы, известные из уровня техники, организованы в соты или кластеры, а взаимные соединения между двумя глобальными системами мультилатерации требуют сложного протокола.
Для глобальной системы мультилатерации полная синхронизирующая сеть может быть организована с использованием резервных линий связи с повышением общей эффективности синхронизации. По сравнению с существующими в настоящее время способами синхронизации для синхронизации приемника (вторичной радиолокационной станции) не требуется дополнительной линии передачи данных, так как он может принять и получить всю значимую информацию, необходимую для своей синхронизации, из контента синхронизирующих сигналов, принимаемых из одной или нескольких других вторичных радиолокационных станций глобальной системы мультилатерации. Вся информация, необходимая для синхронизации, содержится в полезной части синхронизирующих пакетов данных. Каждая из вторичных радиолокационных станций обеспечивает свою собственную синхронизацию путем приема и обработки синхронизирующей информации из одной или нескольких других радиолокационных станций. Этот способ может использоваться для синхронизации глобальных систем мультилатерации любого масштаба без необходимости организации различных кластеров с разными временными базами. Вместо этого после синхронизации всех вторичных радиолокационных станций вся глобальная система мультилатерации будет работать с общей синхронной временной базой. С целью упрощения операций и обработки такой временной базой может служить универсальное координированное время (UTC) или его производная, но, конечно, также может использоваться любая другая временная база (включая обобщенную).
Конечно, вторичная радиолокационная станция, подлежащая синхронизации, может принимать синхронизирующие пакеты данных не только из одной, а из множества других радиолокационных станций. Затем подлежащая синхронизации радиолокационная станция может выполнить какую-нибудь мажоритарную выборку или осуществить математическую обработку с целью получения одной временной базы, по которой радиолокационная станция, подлежащая синхронизации, затем синхронизирует свою локальную временную базу. Если вторичная радиолокационная станция принимает синхронизирующие сигналы из более чем одной из других вторичных радиолокационных станций, принимающая вторичная радиолокационная станция может выбрать один из синхронизирующих сигналов, которые передается указанной другой вторичной радиолокационной станцией, которая синхронизирована лучше всего. В этом случае контент синхронизирующих сигналов может содержать идентификатор тех вторичных радиолокационных станций, с которыми синхронизирована передающая станция, и/или информацию о качестве синхронизации передающей станции.
Информация, содержащаяся в полезной части синхронизирующего сигнала и используемая для синхронизации радиолокационных станций, содержит, например, момент времени, когда синхронизирующий сигнал передается из передающей вторичной радиолокационной станции (время передачи). Время передачи представляет собой общий сигнал (не относящийся к или не предназначенный для какой-либо определенной принимающей вторичной радиолокационной станции), который может быть принят любой принимающей станцией системы вторичной радиолокации. Время передачи не всегда может быть измерено заранее (до того как осуществлена фактическая передача и сигнал покинул трансляционную антенну), так как значение времени передачи должно быть вставлено в полезную часть данных до фактической передачи сигнала, то есть до того, как станет известно точное время передачи. В этом случае синхронизирующий сигнал может содержать два последовательных пакета данных или телеграммы. Второй из двух пакетов данных содержит время передачи первого пакета.
В так называемых когерентных системах время передачи может быть определено заранее. В этом случае достаточно одного пакета данных. Однако и в этом случае используется та же идея настоящего изобретения, заключающаяся в трансляции времени передачи в пакете данных, подлежащем приему принимающими станциями, подлежащими синхронизации.
Помимо времени передачи синхронизирующие сигналы также могут содержать данные о состоянии из передатчиков временного радиомаяка, которые предоставляют различную информацию о работоспособности, которая может быть использована для формирования в реальном времени представления о состоянии различных вторичных радиолокационных станций во всей сети. Идея передатчиков временного радиомаяка позволяет использовать временные радиомаяки даже за пределами системы мультилатерации без необходимости дополнительной линии передачи данных к ним. С точки зрения структуры впервые в уровне техники синхронизация осуществляется в самой наземной станции с использованием временных радиомаяков.
Информация, содержащаяся в синхронизирующем сигнале, передаваемом передающей станцией, предпочтительно является временем передачи во временной области передатчика. Передаваемый сигнал представляет собой общий сигнал, который не предназначен для какого-либо определенного приемника и который поэтому может быть принят любой принимающей станцией в пределах досягаемости передаваемых сигналов. Информация о времени, принятая из передающей станции, может быть использована в приемнике для определения спрогнозированного времени прихода синхронизирующих сигналов во временной области передатчика. Дополнительная информация, такая как фактическое время прихода во временной области приемника, может использоваться для определения разницы между временной областью передатчика и временной областью приемника и, наконец, для синхронизации приемника с временной областью передатчика.
Передаваемая информация о времени, передаваемая как полезная часть контента синхронизирующего сигнала, предпочтительно представляет собой время передачи. Дополнительная информация, такая как дальность передачи до принимающей станции и время распространения для сигналов в целом, может использоваться для определения спрогнозированного времени прихода во временной области передатчика.
Конечно, величину корректировки часов также можно определить в приемной станции путем сравнения времени передачи во временной области передающей станции, содержащегося в принятом синхронизирующем сигнале, с оцененным временем передачи, определенным из фактического времени приема синхронизирующего сигнала в приемной станции во временной области принимающей станции, принимая во внимание время распространения синхронизирующего сигнала.
Посредством описанной односторонней синхронизации радиолокационная станция может быть синхронизирована с общей временной базой, например временной базой, по меньшей мере, одной другой вторичной радиолокационной станции системы вторичной радиолокации. Односторонняя синхронизация обеспечивает простую, быструю и надежную синхронизацию вторичных радиолокационных станций систем вторичной радиолокации. Кроме того, для повышения эффективности и точности процесса мультилатерации может использоваться двухсторонняя синхронизация, то есть определение местоположения воздушного судна. В целом, геометрическое расстояние между калибровочными узлами (соответствующими радиолокационным станциям) известно, так как неподвижные передатчики (соответствующие радиолокационным станциям, передающим синхронизирующие пакеты данных) расположены в фиксированных известных положениях. Способ двухсторонней синхронизации может использоваться для проверки того, имеются ли дополнительные неизвестные эффекты в канале передачи (горы, здания, деревья, метеорологические помехи и т.п.), которые могут повлиять на время распространения синхронизирующих пакетов данных, по меньшей мере, из одной из других радиолокационных станций в радиолокационную станцию, подлежащую синхронизации. При условии фиксированных расстояний между базовыми станциями двухсторонняя синхронизация позволяет испытать в реальном времени эффективность всей системы вторичной радиолокации путем сравнения результатов односторонней синхронизации с результатами двухсторонней синхронизации. В этом случае оценочное время распространения и, следовательно, местоположение воздушного судна, может быть определено с большей точностью, в частности путем учета определенных эффектов в канале распространения, влияющих на фактическое время распространения сигналов отклика. Кроме того, двухсторонняя синхронизация также обеспечивает более точную синхронизацию вторичных радиолокационных станций, принимающих синхронизирующие сигналы. Кроме того, двухсторонняя синхронизация позволяет оценить канал передачи, по которому проходят сигналы отклика на своем пути из транспондера воздушного судна в принимающие радиолокационные станции и синхронизирующие сигналы на своем пути из передающей радиолокационной станции в радиолокационную станцию, подлежащую синхронизации. Это является преимуществом, если станция представляет собой подвижную вторичную радиолокационную станцию, расположенную недавно по необходимости, и если местоположение этой станции еще не определено и/или не передано в другие радиолокационные станции.
Для реализации двухсторонней синхронизации подлежащая синхронизации станция также транслирует сигналы данных. Эти сигналы данных принимаются станциями системы вторичной радиолокации, которые транслируют синхронизирующие сигналы. Таким образом, передающая станция транслирует синхронизирующие сигналы и принимает сигналы данных из других вторичных радиолокационных станций в пределах досягаемости. Принятые сигналы данных могут быть использованы для определения тех станций, из которых могут быть приняты сигналы данных, то есть станций в пределах досягаемости, а также качества сигналов данных, принимаемых из этих станций.
Сигналы данных, передаваемые другими станциями, могут приниматься станцией, передающей синхронизирующий сигнал, а также одной или несколькими другими станциями. Станции, принимающие сигналы данных, в том числе станции, передающие синхронизирующие сигналы, могут вводить информацию в список, обновляемый время от времени. Список может обновляться регулярно или при возникновении определенных событий, например при приеме сигналов из новых станций, при изменении качества принимаемых сигналов или при отсутствии принимаемых сигналов из определенной станции. Список также может содержать отметки времени, назначенные различным станциям, содержащимся в списке и представляющим время, когда было определено качество сигнала данных, принятого из определенной станции.
Информация, содержащаяся в списке, может транслироваться в другие станции системы вторичной радиолокации, предпочтительно как полезная часть синхронизирующего сигнала. Ввиду ограниченной полосы частот при передаче данных по радиоинтерфейсу между вторичными радиолокационными станциями информация предпочтительно передается последовательно для одной из станций, содержащихся в списке, после другой, причем каждый из синхронизирующих сигналов предпочтительно содержит информацию об одной из станций, содержащихся в списке. Если каждый синхронизирующий сигнал, передаваемый вторичной радиолокационной станцией, содержит информацию, относящуюся к каналу передачи непосредственно в одну другую станцию из списка, то после передачи синхронизирующих сигналов в количестве, соответствующем общему количеству станций пределах досягаемости станции, передающей синхронизирующий сигнал, вся информация, содержащаяся в списке, передана.
Дополнительная информация, относящаяся к каналу передачи из передающей станции в одну из вторичных радиолокационных станций, подлежащих синхронизации, принимается и извлекается из полезной части всеми другими станциями в пределах досягаемости. Однако дополнительная информация, относящаяся к каналу передачи, обрабатывается только той принимающей станцией, к которой она относится. Например, если принимающая станция отмечает, что дополнительная информация относится к каналу передачи из передающей станции в другую станцию, принимающая станция лишь использует время передачи, содержащееся в ней, для синхронизации своих часов местного времени и игнорирует информацию, относящуюся к каналу передачи. Напротив, если принимающая станция отмечает, что дополнительная информация относится к каналу передачи из передающей станции в принимающую станцию, принимающая станция использует время передачи, содержащееся в ней, для синхронизации своих часов местного времени и использует информацию, относящуюся к каналу передачи, для обновления значения времени распространения с целью повышения точности будущих синхронизации.
Ввиду того, что местоположения станций и характеристики каналов передачи изменяются только в исключительных случаях, а если и меняются, то в течение очень больших промежутков времени, а также ввиду того, что станции оборудованы кварцевыми генераторами, дополнительная информация, относящаяся к каналу передачи, содержащаяся в списке передающей (транслирующей) станции, должна обновляться и передаваться в другие станции не очень часто. Хорошие результаты обеспечивают частоты обновления и передачи в диапазоне одного раза в одну или несколько минут, предпочтительно один или два раза в минуту.
Например, если в пределах досягаемости вторичной радиолокационной станции находятся десять других станций системы вторичной радиолокации, и если дополнительная информация, относящаяся к каналу передачи, транслируется по радиоинтерфейсу, синхронизирующие сигналы могут передаваться регулярно два раза в секунду, то есть 120 раз в минуту. Если бы синхронизирующие сигналы содержали информацию, относящуюся к каналу передачи только в одну из станций в пределах досягаемости, то десять синхронизирующих сигналов должны содержать дополнительную информацию для определенной станции. Если бы информация, относящаяся к каналу передачи, обновлялась каждую минуту, то только десять из 120 синхронизирующих сигналов, переданных в минуту, должны содержать дополнительную информацию, относящуюся к каналу передачи. Принимающая станция, подлежащая синхронизации, будет синхронизировать свою локальную временную область 120 раз в минуту и обновлять информацию, относящуюся к времени распространения для сигналов, передаваемых из транслирующей станции в принимающую станцию, каждую минуту. Синхронизирующие сигналы, содержащие дополнительную информацию, относящуюся к каналу передачи, могли бы передаваться последовательно, так чтобы остальные 110 синхронизирующих сигналов, подлежащих передаче в эту минуту, не содержали бы дополнительной информации, относящейся к каналу передачи. В альтернативном варианте синхронизирующие сигналы, содержащие дополнительную информацию, относящуюся к каналу передачи, могут распределяться так, чтобы, например, каждый двенадцатый синхронизирующий сигнал содержал дополнительную информацию, относящуюся к каналу передачи из транслирующей станции в одну из других станций в пределах досягаемости.
Конечно, дополнительная информация, содержащаяся в синхронизирующих сигналах, может передаваться по любому каналу передачи между передающей вторичной радиолокационной станцией и вторичными радиолокационными станциями, подлежащими синхронизации, например по отдельной линии передачи или отдельной сети, организованной между вторичными радиолокационными станциями системы вторичной радиолокации. В этом случае доступна более широкая полоса частот и можно передавать сразу всю информацию, содержащуюся в списке во вторичной радиолокационной станции, передающей синхронизирующий сигнал и подлежащей синхронизации.
В соответствии с предпочтительным вариантом осуществления настоящего изобретения предлагается, чтобы синхронизирующие сигналы, а точнее синхронизирующие пакеты данных (синхронизирующие пакеты) передавались по радиоинтерфейсу, используемому также для передачи опрашивающих сигналов в транспондеры воздушных судов и для приема сигналов отклика из транспондеров воздушных судов. То же относится и к пакетам данных, передаваемым двухсторонним образом из вторичной радиолокационной станции, подлежащей синхронизации, в одну или несколько других вторичных радиолокационных станций системы вторичной радиолокации. Синхронизирующие пакеты и пакеты данных также могут передаваться посредством радиоинтерфейса, используемого также для передачи сигналов между наземными станциями и воздушными судами. Для связи между наземными станциями и воздушными судами может использоваться режим S (восходящая линия связи: 1030 МГц, нисходящая линия связи: 1090 МГц), универсальный приемопередатчик предоставления доступа UAT (Universal Access Transceiver, восходящая и нисходящая линии связи: например, 978 МГц), режим 4 линии передачи данных очень высокой частоты (VHF Data/Digital Link, VDL) (с использованием одной или нескольких из существующих очень высоких авиационных частот) или их разновидности на других частотах. Для передачи синхронизирующей информации могут использоваться все сигналы радиочастоты. Для систем управления воздушным движением это означает, что каждая линия связи сигнала радиочастоты независимо от основного назначения может быть использована для синхронизации системы мультилатерации. Целью изобретения является минимизация использования дополнительных сигналов радиочастоты и использование уже существующих сигналов гибридным образом. Средства для модуляции данных на эти сигналы может представлять собой либо использование уже существующих полей данных, либо использование дополнительных схем модуляции и кодирования, которые невидимы и прозрачны для традиционного оборудования, уже использующего эти сигналы.
В соответствии с этим вариантом осуществления передача синхронизирующих пакетов данных из, по меньшей мере, одной из вторичных радиолокационных станций во вторичную радиолокационную станцию, подлежащую синхронизации, и передачи пакетов данных в противоположном направлении осуществляется в линии связи радиочастоты, так что двухстороннее вычисление может быть полностью выполнено на основании радиоданных.
Так как все станции оборудованы довольно точными кварцевыми генераторами, частота передачи для синхронизирующих пакетов состояния может быть маленькой и составлять один или два раза в минуту. Эта частота передачи достаточно велика для обеспечения требуемой точности синхронизации часов местного времени станций в диапазоне всего лишь нескольких наносекунд. Параметр «состояние уровня», формируемый из пакетов состояния, может быть постоянным в течение определенного времени, и поэтому более частая передача этого параметра не требуется.
Различные вторичные радиолокационные станции системы вторичной радиолокации рассматривают сам синхронизирующий сигнал как линию связи для передачи данных, которая содержит всю значимую информацию для синхронизации. Важным аспектом изобретения является гибридное использование синхронизирующего сигнала, с одной стороны, как средства беспроводной линии связи для передачи данных и, с другой стороны, содержащего все значимые данные для процесса синхронизации, а не только служащего в качестве источника для идентификации отправителя.
Тот факт, что синхронизирующий сигнал несет с собой данные, также можно использовать для передачи большего количества информации, чем просто значимые для синхронизации данные. При реализации в зонах с низким объемом трафика такая дополнительная информация может содержать даже результаты измерения от удаленных датчиков, что устраняет необходимость организации дополнительной линии связи для передачи данных, которая может быть очень дорогой. Дополнительная информация может передаваться либо на той же частоте и с той же схемой модуляции, что и основной используемый синхронизирующий сигнал, или на других частотах. Так как большая часть аппаратного обеспечения в настоящее время имеет широкие частотные возможности, также возможна передача в соседнем канале, которую можно реализовать с помощью уже установленного аппаратного обеспечения, кабельных линий и/или антенны. В качестве примера можно использовать передатчик временного радиомаяка в полосе частот 1090/1030 МГц для передачи дополнительных данных в полосе частот 1030/1090 МГц или любой промежуточной полосе частот, например с использованием схемы модуляции с узкой полосой частот, например UAT и т.п.
Предлагаемая структура передатчиков временного радиомаяка обеспечивает точную синхронизацию множества приемников датчиков мультилатерации. Таким же образом, сигналы времени, передаваемые передатчиками временного радиомаяка системы, также могут использоваться подвижным или находящимся в воздухе участником для самостоятельного определения своего местонахождения. Другими словами, структура для синхронизации вторичных радиолокационных станций системы вторичной радиолокации также используется для навигации. Это позволяет получить, по меньше мере, локально, навигационную систему, полностью независимую от традиционных навигационных систем, например GPS, Galileo и др., что позволяет пользователям осуществлять измерения автономного мониторинга целостности приемника (Receiver Autonomous Integrity Monitoring) (проверять в реальном времени, правильно ли работает приемник с заданными временными допусками).
При приеме сигналов из четырех станций временного радиомаяка подвижный блок может решить уравнение зависимости своего положения от времени (четыре неизвестных). При приеме сигналов из меньшего количества станций временного радиомаяка он может решить уравнение, определяющее его положение, по меньшей мере, частично или, при использовании дополнительных неполных средств определения местоположения, например дальномерной системы DME (Distance Measurement Equipment), полностью.
В соответствии с предпочтительным вариантом осуществления изобретения несколько передатчиков временного радиомаяка работают в полосе частот авиационного вторичного радиолокатора (1030/1090 МГц). Однако передатчики временного радиомаяка также могут использовать другие частоты и схемы модуляции в полосе частот DME (от 960 до 1215 МГц) или другие полосы радионавигации, например полосу ILS (система посадки по приборам)/VOR (всенаправленный радиомаяк очень высокой частоты) от 110 до 118 МГц. Участники (то есть находящиеся в воздухе приемники) затем будут использовать информацию, содержащуюся в этих сигналах, для целей определения своего местонахождения. Новый аспект настоящего изобретения заключается в наличии двух систем мультилатерации, использующих временные радиомаяки: одна система является «классической» системой с наземными датчиками, а другая является находящейся в воздухе системой, в которой указанные сигналы используются в дополнение к навигации и дополняют навигационные средства (навигационную систему, использующую радиолокацию), предлагающие лишь неполные решения, такие как дальномерная система, с образованием завершенной двухмерной/трехмерной навигационной системы.
Временной радиомаяк может передавать информацию о согласовании во времени различными способами. Как подробно описано ниже, в некогерентных системах информация о согласовании во времени может быть разделена на пару вызов/продолжение. Это означает, что пакеты передаются парами, при этом первый пакет содержит идентификатор системы и информацию о состоянии. В когерентных системах время передачи известно заранее, поэтому пары не нужны, и пакет данных содержит точное время передачи. Информация также может передаваться посредством так называемой комбинированной модуляции, например кодированных сигналов с расширенным спектром, перекрывающих другие сигналы иного назначения.
Таким образом, не только системы мультилатерации, но также передатчики VOR, ILS или DME могут быть оборудованы дополнительными передатчиками или модуляторами для передачи калиброванных по времени и высокоточных временных радиомаяков.
В настоящее время хорошо известным из уровня техники источником синхронизации для систем мультилатерации является система GPS. Настоящее изобретение позволяет использовать также другие источники времени для синхронизации систем мультилатерации, например сигналы очень низкой частоты, систему дальней навигации (LORAN, Long Range Navigation) и т.п.Когда временные радиомаяки мультилатерации (или другие радиомаяки) используют эти альтернативные источники времени, может быть организована наземная широковещательная система, независимая от системы GPS или другой пространственной системы GNSS, что позволяет находящимся в воздухе пользователям использовать этот альтернативный источник времени для независимого определения своего местонахождения.
Краткое описание чертежей
Далее подробно описаны предпочтительные варианты осуществления настоящего изобретения со ссылкой на сопроводительные чертежи, на которых:
фиг.1 представляет собой первый предпочтительный вариант осуществления системы вторичной радиолокации в соответствии с настоящим изобретением;
фиг.2 представляет собой второй предпочтительный вариант осуществления системы вторичной радиолокации в соответствии с настоящим изобретением;
фиг.3 представляет собой предпочтительный вариант осуществления способа управления воздушным движением посредством системы вторичной радиолокации в соответствии с настоящими изобретением;
фиг.4 представляет собой предпочтительный способ синхронизации вторичных радиолокационных станций системы вторичной радиолокации.
Осуществление изобретения
На фиг.1 показана система 1 вторичной радиолокации в соответствии с первым вариантом осуществления настоящего изобретения. Система 1 вторичной радиолокации включает множество вторичных радиолокационных станций 2, таких как станции А, В, С и D, показанные на фиг.1. Специалисту в данной области техники очевидно, что система 1 вторичной радиолокации может содержать большее или меньшее число станций 2, чем показанные на фиг.1 четыре станции 2. Каждая из станций 2 снабжена, по меньшей мере, одной антенной 3 для передачи (отправки) и приема сигналов радиочастоты (RF). Данные могут передаваться посредством сигналов радиочастоты в соответствии со стандартом режима S, определенным Международной организацией гражданской авиации ИКАО (ICAO, International Civil Aviation Organization). Все станции 2 соединены с центральным вычислительным блоком 4 посредством линий 5 связи. Линии 5 могут являться кабельными или беспроводными линиями. Вычислительный блок 4 содержит блок 6 управления и блок 7 визуализации. Очевидно, настоящее изобретение не ограничивается сигналами данных по протоколу режима S и может быть реализовано с использованием любого типа сигналов, обмен которыми осуществляется между наземными станциями и воздушным судном, например универсальным приемопередатчиком предоставления доступа (UAT).
Транспондер 9 на борту воздушного судна (не показано) транслирует сигналы 8 отклика по стандарту режима S (1090 МГц), которые могут приниматься антеннами 3 станций А, В, С в пределах зоны покрытия транспондера 9. Время от времени, по меньшей мере, некоторые из вторичных радиолокационных станций 2 системы 1 вторичной радиолокации передают специальные опрашивающие сигналы 8, 8' в соответствии со стандартом режима S (1030 МГц). Опрашивающие сигналы 8, передаваемые станциями А, В и С, принимаются транспондером 9 на борту воздушного судна (не показано). Опрашивающие сигналы 8', передаваемые станцией D, не принимаются транспондером 9. Транспондер 9, а точнее вычислительный алгоритм в транспондере 9 на борту воздушного судна проверяет, содержит ли принятый сигнал 8 действительный опрашивающий сигнал. Если принятый сигнал содержит действительный опрашивающий сигнал, транспондер 9 транслирует сигнал 8 отклика по стандарту режима S (1090 МГц), который может приниматься антеннами 3 станций А, В, С в пределах зоны покрытия транспондера 9. Сигналы 8 отклика содержат, например, идентификатор воздушного судна, запланированное направление воздушного судна и другую информацию, относящуюся к работоспособности и состоянию воздушного судна.
Информация о согласовании во времени, содержащаяся в сигналах 8, в частности информация, указывающая на время приема (время прихода) сигналов 8 отклика в станциях А, В, С, передается в центральный вычислительный блок 4 посредством линии 5 связи. Местоположения станций А, В, С известны центральному вычислительному блоку 4. Вычислительный блок 4 определяет расстояние между станциями А, В, С, с одной стороны, и транспондером 9, с другой стороны, посредством оценки величин времени, переданных в центральный вычислительный блок 4 из станций А, В, С. Местоположение воздушного судна определяется в вычислительном блоке 4 посредством так называемой операции мультилатерации и может отображаться в блоке 7 визуализации при необходимости с другой информацией, относящейся к воздушному судну.
Каждая из вторичных радиолокационных станций 2 имеет часы местного времени, например, в форме кварцевого генератора, обеспечивающего локальную временную базу или временную область. Для обеспечения надежного и точного определения местоположения воздушного судна вторичные радиолокационные станции 2, а точнее их часы местного времени, должны быть синхронизированы. В настоящем изобретении предлагается особенно эффективный способ синхронизации станций 2 в общую временную базу, действительную для всех станций 2. С целью упрощения операций указанная общая временная база может представлять собой универсальное координированное время (UTC) или его производную. Однако общая временная база может представлять собой любую другую временную базу (включая искусственную).
Синхронизация вторичных радиолокационных станций 2 осуществляется посредством информации о синхронизации, содержащейся в полезной части синхронизирующих сигналов 10 (например, пакетов данных), передаваемых между станциями 2. В частности, информация о синхронизации содержит информацию о согласовании во времени, относящуюся к времени передачи синхронизирующих сигналов 10. Синхронизирующие пакеты данных 10 предпочтительно также передаются как сигналы радиочастоты в соответствии со стандартом режима S (или любым другим стандартом, например UAT).
Основная идея настоящего изобретения заключается в предоставлении простого и дешевого способа синхронизации вторичных радиолокационных станций 2 системы 1 вторичной радиолокации. Указанная цель достигается посредством использования аппаратного обеспечения, уже имеющегося в станциях 2. Информация о согласовании во времени передается между станциями 2 посредством уже имеющегося оборудования для передачи сигналов. Для определения местоположения воздушного судна посредством операции мультилатерации режима S станции 2 оборудованы аппаратным обеспечением, предназначенным для приема из транспондеров 9 сигналов 8 временного радиомаяка на частоте 1090 МГц, а также для передачи опрашивающих сигналов 8 на частоте 1030 МГц. Данное аппаратное обеспечение используется для передачи и приема синхронизирующих сигналов 10 во вторичных радиолокационных станциях 2. Поэтому станции 2 передают синхронизирующие сигналы 10 на частоте 1030 МГц (в этом случае приемник в станциях 2 должен быть расширен для работы на частоте 1030 МГц) или предпочтительно на частоте 1090 МГц (в этом случае передатчик в станциях 2 должен быть расширен для работы на частоте 1030 МГц). Передатчики и/или приемники во вторичных радиолокационных станциях 2 могут быть легко расширены, так как необходимое аппаратное обеспечение уже имеется в станциях 2. Кроме того, необходимый способ модуляции уже реализован в станциях 2.
Кроме того, в настоящем изобретении не требуются дополнительные внешние вычислительные блоки, с которыми должны быть соединены вторичные радиолокационные станции 2, для вычисления сдвигов различных часов местного времени относительно общей временной базы, а также для обеспечения синхронизации станций 2. Напротив, в настоящем изобретении определяются сдвиги часов местного времени, и синхронизация станция 2 осуществляется в самих станциях. Это достигается путем передачи информации о согласовании во времени, в частности информации, указывающей на время передачи синхронизирующих сигналов 10, как части синхронизирующих сигналов 10, передаваемых между станциями 2. Это позволяет каждой вторичной радиолокационной станции 2, принимающей синхронизирующий сигнал 10, осуществлять свою собственную синхронизацию. Поэтому каждая вторичная радиолокационная станция 2 выполнена с возможностью самосинхронизации лишь путем перехвата и приема синхронизирующих сигналов 10. Центральный вычислительный блок 4 служит лишь для определения местоположения соответственно транспондера 9 и воздушного судна и не используется для синхронизации вторичных радиолокационных станций 2.
Процесс синхронизации, предлагаемый в настоящем изобретении, является очень быстрым, так как для осуществления синхронизации станций диалоговая связь между самими вторичными радиолокационными станциями 2 и другими возможными внешними подсистемами не требуется. Одна или несколько станций 2 должны лишь передавать синхронизирующий сигнал 10, уже содержащий всю информацию, которая необходима принимающим станциям 2 для осуществления собственной синхронизации. В частности, принимающим станциям 2 не требуется получать дополнительную информацию из других внешних подсистем или передавать отклик в передающую станцию 2 для того, чтобы осуществить синхронизацию.
В когерентных системах время передачи синхронизирующего сигнала 10 может быть легко и довольно точно спрогнозировано и передано в синхронизирующем сигнале 10. Однако в некогерентных системах это не так легко. В этом случае синхронизирующие сигналы 10 содержат, по меньшей мере, два последовательно передаваемых пакета данных. Величина (значение) времени передачи синхронизирующего сигнала 10 является частью контента второго из двух последовательно передаваемых пакетов данных. Значение времени передачи прогнозируется на основании информации, полученной из передачи первого из двух последовательно передаваемых пакетов данных. Синхронизирующий сигнал 10, содержащий два последовательно передаваемых пакета данных, конечно, не ограничивается некогерентными системами и также может использоваться в когенертных системах.
При возможном применении в системе мультилатерации PAM-FRA (Precision Approach Monitoring Frankfurt air space, система точного мониторинга франкфуртского воздушного пространства) система 1 вторичной радиолокации может покрывать зону около 150 на 100 морских миль (что соответствует приблизительно 250 на 200 км). Синхронизация сети, содержащей вторичные радиолокационные станции 2 основана на базовой сети, являющейся ячеистой. По меньшей мере некоторые из станций 2 действуют как передатчики временного радиомаяка. В примере, показанном на фиг.1, станции А и С действуют как передатчики временного радиомаяка. Конечно, все станции 2 могут действовать как передатчики временного радиомаяка. Станции 2, действующие как передатчики временного радиомаяка, предпочтительно расположены на открытой местности, например на вершине телевизионной или радиопередающей башен. Станции А и С, действующие как передатчики временного радиомаяка, периодически передают синхронизирующие пакеты 10 данных, например один или два раза в секунду.
Информация, содержащаяся в полезной части синхронизирующего сигнала 10 и используемая для синхронизации радиолокационных станций 2, содержит, например, момент времени, когда синхронизирующий сигнал 10 передается из передающей вторичной радиолокационной станции А, С (так называемое время передачи). Конечно, вместо фактического времени передачи также может использоваться какая-либо другая переменная или величина, указывающая на время передачи. Время передачи определяется во временной области передающей станции. С целью упрощения обработки различных величин времени в станциях, подлежащих синхронизации, все значения времени могут быть представлены в стандартизованном формате, например в формате UTC (Universal Time Coordinated, универсальное координированное время). Время передачи нельзя измерить заранее, потому что значение времени передачи должно быть вставлено в полезную часть данных до фактической передачи сигнала 10, то есть до того, как станет известно точное время передачи. Можно вставить оценочное значение времени передачи в полезную часть синхронизирующего сигнала 10.
Однако в соответствии с предпочтительным вариантом осуществления синхронизирующий сигнал 10 состоит, по меньшей мере, из двух последовательных пакетов данных или телеграмм. Эти два пакета связаны друг с другом, например посредством одинакового исходящего адреса или другого соответствующего идентификатора, так как оба пакета данных переданы одной и той же станцией 2. Указанные два пакета передаются непосредственно один за другим, то есть второй пакет передается в течение миллисекунд или даже микросекунд после того, как выполнена передача первого пакета. Передача первого пакета может быть использована передающей станцией 2 с целью определения характеристик передачи. Характеристики передачи, определенные при передаче первого пакета данных (вызов), могут использоваться для получения очень точной оценки времени передачи для последующего второго пакета данных (продолжение). В альтернативном варианте второй из двух пакетов данных содержит лишь фактическое время передачи первого пакета.
Синхронизирующие сигналы 10 также могут дополнительно содержать информацию, относящуюся к состоянию, местоположению и синхронизации передающей станции 2. В частности, синхронизирующий сигнал 10, передаваемый некоторой станцией 2, может содержать географическое положение станции, информацию о том, с какой другой станцией 2 синхронизирована передающая станция, информацию о качестве синхронизации передающей станции 2 и другую информацию, относящуюся к работоспособности и состоянию передающей станции 2. Другие станции 2 действуют как клиенты и могут принимать передаваемые синхронизирующие сигналы 10. В примере, показанном на фиг.1, синхронизирующие сигналы 10, передаваемые станцией А, принимаются другими станциями В и С. Другая станция D может быть расположена вне досягаемости передающей станции А и поэтому не может принимать синхронизирующие сигналы 10, передаваемые станцией А. Принимающие станции В и С могут синхронизировать сами себя путем перехвата синхронизирующих сигналов 10, транслируемых передающей станцией А. Принимающие станции В и С могут осуществлять коррекцию своих часов местного времени в соответствии с синхронизирующей информацией, содержащейся в полезной части принимаемой синхронизирующей информации. Путем приема дополнительной синхронизирующей информации из других вторичных радиолокационных станций 2, действующих как временные радиомаяки, может быть организована многоячеистая сеть для целей синхронизации.
Благодаря тому, что в сети, содержащей стационарные вторичные радиолокационные станции 2, расстояние между передатчиком и приемником синхронизирующего сигнала 10 известно, в приемной станции может быть определено время распространения синхронизирующего сигнала 10. Кроме расстояния между передатчиком и приемником в полезной части синхронизирующего сигнала 10 также может передаваться дополнительная информация, которая может влиять на время распространения. Эта дополнительная информация может быть получена посредством двухсторонних измерений, описанных подробно ниже со ссылкой на вариант осуществления, показанный на фиг.2. Фиг.1 относится лишь к односторонним измерениям. Прием нескольких временных радиомаяков повышает надежность и точность синхронизации. Например, на фиг.1 станция В принимает синхронизирующие сигналы 10 из станции А, а также из станции С.
Синхронизирующие сигналы 10, передаваемые вторичными радиолокационными станциями А и С помимо моментов времени, когда передаются синхронизирующие сигналы 10, могут содержать дополнительную информацию. Такая информация может представлять собой в том числе двухсторонние измерения с участием других временных радиомаяков, доступность других радиомаяков, эффекты, имеющиеся в канале передачи и влияющие на длительность передачи синхронизирующих сигналов 10 в определенную станцию 2, информацию о дифференциальной GPS и предупреждения. Эффективные способы кодирования обеспечивают возможность передачи этой информации, несмотря на относительно низкую битовую частоту передачи в радиочастотном канале.
Дополнительная информация также может передаваться путем использования различных дополнительных способов модуляции в том же самом канале (1090 МГц) или в других каналах или путем добавления в существующую структуру сигнала схем модуляции более высокого порядка. Эта схема также может использоваться для других сигналов (например, UAT).
Благодаря использованию описанных выше способов синхронизации вторичных радиолокационных станций 2 система 1 вторичной радиолокации становится свободно масштабируемой. Она может быть легко расширена путем добавления дополнительных станций 2. Такие станции могут быть очень легко синхронизированы с системой 1 вторичной радиолокации благодаря тому, что каждая вторичная радиолокационная станция 2 может синхронизировать саму себя автоматически лишь путем приема и обработки широковещательных синхронизирующих сигналов 10 из одной или нескольких других станций 2, которые уже синхронизированы. Смежным кластерам глобальной системы мультилатерации специализированный или патентованный протокол для синхронизации своих локальных временных разверток не требуется. Так как каждая станция 2 работает в общей временной базе, произвольная комбинация всех станций 2 системы вторичной радиолокации может образовывать центральную вычислительную станцию 2, многие из которых могут существовать одновременно.
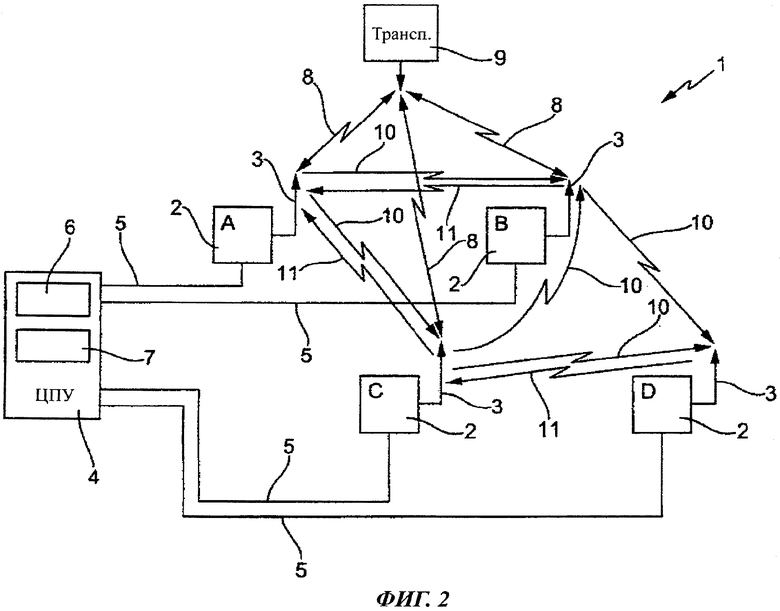
Преимущество настоящего изобретения по сравнению с системой синхронизации глобальной системы мультилатерации из уровня техники заключается в том, что ячейка согласования во времени является свободно масштабируемой и по сути резервируемой, то есть потеря одного передатчика временного радиомаяка (станции 2) может быть компенсирована другими станциями 2. В настоящем изобретении используются линии связи передатчик-передатчик для синхронизирующей базы. Преимущество заключается в том, что указанные линии связи могут быть установлены и оценены по качеству с помощью двухстороннего вычисления, которое также отслеживает любое воздействие на канал передачи (который снова ретранслируется). Двухсторонняя синхронизация описана подробно со ссылкой на фиг.2. Компоненты на фиг.2, показанные из фиг.1 и описанные со ссылкой на фиг.2., имеют те же ссылочные номера позиций, что и компоненты варианта осуществления, показанного на фиг.1.
Двухсторонняя синхронизация описана на примере вторичной радиолокационной станции 2, например станции А, транслирующей синхронизирующий сигнал 10, который принимается другой вторичной радиолокационной станцией 2, например станцией В. Как отмечено выше, синхронизирующий сигнал 10 в своей полезной части содержит время передачи или другую величину, указывающую на время передачи сигнала 10, которое представляет собой момент времени, в который сигнал 10 покидает антенну 3 станции А.
Кроме того, станция А также принимает сигналы 11 данных, транслируемые из одной или нескольких других станций В и С. Путем приема сигналов 11 данных из других станций В и С станция А может определить, какие другие станции В и С находятся в пределах досягаемости. Например, станция D расположена вне досягаемости, и поэтому станция А не принимает сигналы 11 данных из станции D. Кроме того, станция А может определить информацию, относящуюся к каналу передачи между станцией А и другими станциями В и С в пределах досягаемости. Эта информация может представлять собой, например, качество передачи. Информация, относящаяся к различным каналам передачи между станцией А и другими станциями В и С, может подаваться в список или базу данных в станции А.
Данный список может обновляться время от времени. Контент указанного списка передается в другие станции В и С в качестве дополнительной информации, составляющей часть полезней части синхронизирующих сигналов 10. С целью уменьшения ширины полосы частот, необходимой для синхронизации станций 2, в радиоинтерфейсах между станциями 2 дополнительная информация, относящаяся к каналу передачи между станцией А и другими станциями В и С, передается менее часто, чем синхронизирующая информация. Например, при том что время передачи, используемое для синхронизации станций 2, может передаваться по меньшей мере один или два раза в секунду, дополнительную информацию, относящуюся к каналу(ам) передачи, достаточно передавать один раз в минуту или даже реже.
Вместе с информацией, относящейся к длительности передачи синхронизирующего сигнала 10 из передающей станции А в принимающую станцию В (так называемое время распространения), время передачи, извлекаемое из полезной части принятого синхронизирующего сигнала 10 в принимающей станции В, используется для определения фактического времени прихода в принимающей станции В на основании временной базы передающей станции А. Это время прихода, основанное на временной базе передающей станции А, сравнивается в принимающей станции В с фактическим временем прихода сигнала 10 в принимающую станцию В во временной базе принимающей станции В. Путем сравнения указанных двух времен прихода можно вычислить величину корректировки для часов местного времени станции В и можно скорректировать часы станции В с помощью величины корректировки и синхронизировать их с часами местного времени станции А. Конечно, также можно вычислить оценочное время передачи во временной области принимающей станции В по фактическому времени прихода во временной области станции В и времени распространения синхронизирующего сигнала 10. В этом случае фактическое время передачи во временной области передающей станции А сравнивается с оценочным временем передачи во временной области принимающей станции В с целью получения величины корректировки для часов местного времени станции В.
Элементом неопределенности является информация, относящаяся к длительности передачи (времени распространения) синхронизирующего сигнала 10 из передающей станции А в принимающую станцию В, если эта информация вычисляется только на основании расстояния между двумя станциями А и В. Расстояние до других станций 2 может храниться во всех вторичных радиолокационных станциях 2 системы 1 вторичной радиолокации. Однако это возможно только в стационарных станциях 2. Кроме того, это подразумевает, что структура системы 1 вторичной радиолокации, в частности количество и идентификаторы всех станций 2, заранее известна и хранится во всех станциях 2. Это существенно уменьшает гибкость системы 1, так как добавление новых станций 2 может быть довольно затруднительно. Кроме того, каждая станция 2 должна иметь соответствующее средство хранения для хранения информации о сети.
Если станции 2 являются подвижными, предпочтительно, чтобы станции 2 были снабжены средствами для определения их местоположения, например GPS-приемниками или подобными спутниковыми приемниками. Точная информация о фактическом местоположении станций 2, определенном GPS-приемником или подобными системами, может передаваться из передающей станции А в принимающую станцию В как часть полезной части синхронизирующих сигналов 10. Имея эту информацию и зная собственное местоположение, принимающие станции В могут вычислить достаточно точные величины расстояния между предающей станцией А и принимающей станцией В, а также длительность передачи синхронизирующего сигнала 10 из передающей станции А в принимающую станцию В, даже если станции А, В являются подвижными станциями 2.
Точность величины длительности передачи синхронизирующего сигнала 10 может быть дополнительно повышена, если определить качество передачи между станциями 2 системы 1 вторичной радиолокации. Это можно сделать посредством сигналов 11 данных, принимаемых станцией А, транслирующей синхронизирующие сигналы 10 от других станций 2, например станций В и С. Величина, указывающая на качество передачи, может представлять собой, например, фактическую длительность передачи дополнительных сигналов 11 данных из передающих станций В и С в принимающую станцию А. Дополнительный сигнал 11 может представлять собой синхронизирующий сигнал, содержащий в своей полезной части синхронизирующую информацию, подобно синхронизирующему сигналу 10. Путем оценки временных характеристик передаваемого сигнала 11 в принимающей станции А может быть определена с высокой точностью достоверная величина длительности передачи сигнала между станциями А и В. Эта информация затем может быть вставлена в полезную часть синхронизирующего сигнала 10 и передана из станции А в станцию В, в которой она используется в числе других значений времени и другой информации для вычисления величины корректировки для часов местного времени. Передача сигналов 10, 11 в обоих направлениях между станциями 2 является частью двухсторонней синхронизации, показанной на фиг.2.
Несмотря на то что в настоящей патентной заявке рассматривается передача данных из одной станции в другую, очевидно, что такая передача данных не является передачей данных с двумя конечными точками. Напротив, передаваемые сигналы представляют собой широковещательные сигналы, которые передаются некоторой станцией 2, например станцией А, и могут приниматься любыми другими станциями 2, например станциями В, С или D, в пределах зоны покрытия станции А. То же самое справедливо и для ответных сигналов 11 (сигналов обратной связи), которые также являются широковещательными. Тем не менее, широковещательные сигналы 10 и/или 11 могут содержать информацию о принимающем адресе, которая назначает определенный сигнал 10, 11 определенной принимающей станции 2. Например, синхронизирующий сигнал 10, транслируемый станцией С, принимается станциями В и D (которые в данном случае синхронизированы со станцией С). Если бы ответный сигнал 11 также содержал синхронизирующую информацию, он бы мог рассматриваться как синхронизирующий сигнал. В этом случае ответный сигнал 11, транслируемый станцией С, соответствовал бы синхронизирующему сигналу 10, передаваемому станцией С, и синхронизирующий сигнал 10 (как ответный сигнал 11) принимался бы станцией А (которая в данном случае также синхронизирована со станцией С).
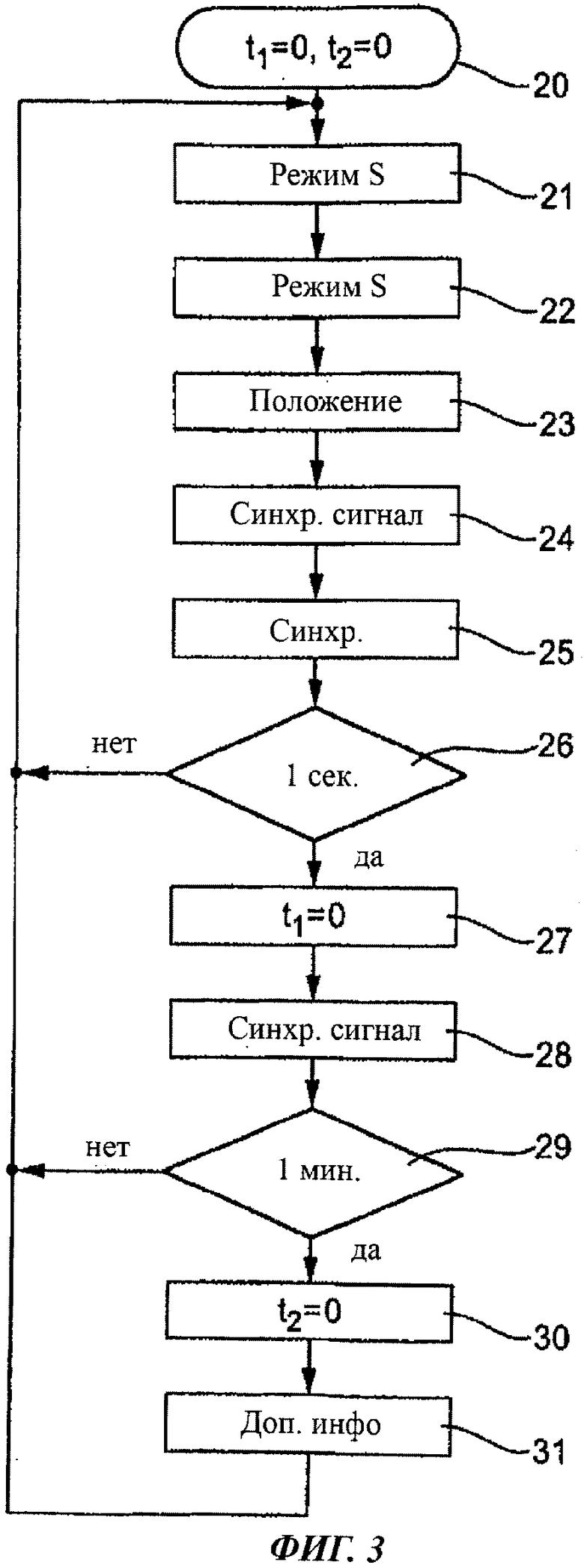
На фиг.3 показан предпочтительный вариант осуществления способа управления воздушным движением посредством системы 1 вторичной радиолокации в соответствии с настоящим изобретением. В способе, показанном на фиг.3, используют одну из вторичных радиолокационных станций 2 системы 1 вторичной радиолокации. Способ начинают на функциональном шаге 20, на котором таймеры t1 и t2 устанавливают равными нулю. На следующем функциональном шаге 21 опрашивающий сигнал 8 режима S или любой другой подходящий широковещательный сигнал транслируют посредством станции 2. Сигнал 8 могут принимать посредством транспондера 9 воздушного судна, который передает соответствующий сигнал 8 отклика режима S или любой другой подходящий сигнал 8 отклика. Сигнал 8, переданный посредством транспондера 9, принимают посредством вторичной радиолокационной станции 2 на функциональном шаге 22. На функциональном шаге 23 принятый сигнал 8 обрабатывают или определяют в станции 2, по меньшей мере, информацию, относящуюся к местоположению и высоте воздушного судна, возможно вместе с информацией, относящейся к временным характеристикам сигнала 8, и направляют в центральный вычислительный блок 4 системы 1 вторичной радиолокации посредством линий 5 связи. В вычислительном блоке 4 вычисляют (блок 6 управления) и визуализируют вместе с другой информацией, относящейся к воздушному судну (блок 7 визуализации), местоположение воздушного судна.
Затем на функциональном шаге 24 станция 2 принимает по меньшей мере один синхронизирующий сигнал 10, транслируемый от одной или нескольких других станций 2. На функциональном шаге 25 часы местного времени станции 2 синхронизируют в зависимости от контента, в частности времени передачи, одного или нескольких принятых синхронизирующих сигналов 10. Синхронизирующий сигнал 10 передают приблизительно один раз каждую секунду посредством каждой из станций 2 системы 1 вторичной радиолокации. Если принятый синхронизирующий сигнал 10 содержит дополнительную информацию, относящуюся к каналу передачи из передающей станции 2 в принимающую станцию 2, в которой осуществляют указанный способ, из полезной части сигнала 10 извлекают дополнительную информацию и обрабатывают с целью более точного определения времени распространения, необходимого сигналу 10 для перемещения из передающей станции 2 в принимающую станцию 2. Дополнительную информацию, относящуюся к другим каналам передачи из передающей станции 2 в другие станции, которые не являются станцией 2, в которой осуществляют настоящий способ, игнорируют. Однако в указанных станциях также могут осуществлять способы, подобные описанному здесь. Каждая станция 2 вставляет дополнительную информацию, относящуюся к каналу передачи, в полезную часть синхронизирующего сигнала 10, который она передает, приблизительно каждую минуту, то есть приблизительно каждый 60-ый синхронизирующий сигнал 10 содержит дополнительную информацию, относящуюся к качеству передачи между передающей и принимающей станциями 2.
На шаге 26 опроса определяют, превысило ли время t определенное значение времени, например одну секунду, и если не превысило, станция 2 продолжает передавать опрашивающие сигналы режима S или подобные и принимать сигналы отклика режима S или подобные из транспондеров 9 (шаги с 21 по 23) воздушных судов и принимать синхронизирующие сигналы 10 из других станций 2, а также синхронизировать свои часы местного времени (шаги 24 и 25) до тех пор, пока время не превысит одну секунду.
Если время t превысило одну секунду, на функциональном шаге 27 таймер t1 вновь устанавливают равным нулю. На функциональном шаге 28 станция 2 транслирует свой собственный сигнал 11, который могут принимать другие станции 2 в пределах досягаемости и который может содержать информацию для синхронизации других станций 2. Таким образом, в этом варианте осуществления синхронизирующая информация, в частности время передачи сигнала 11, транслируется станцией 2 каждую секунду.
На шаге 29 опроса определяют, превысило ли время t2 определенное значение времени, например одну минуту. Если время t2 не превысило одну минуту, осуществляют возврат на функциональный шаг 21 до тех пор, пока таймер t2 не превысит одну минуту. Если таймер t2 превысил одну минуту, на функциональном шаге 30 таймер t2 вновь устанавливают равным нулю. Затем на функциональном шаге 31 станция 2 предоставляет одной или нескольким другим станциям 2 дополнительную информацию, относящуюся к качеству передачи и подлежащую вставке в синхронизирующий сигнал 11, передаваемый станцией 2 и принимаемый другими станциями 2 в пределах досягаемости на шаге 28 в следующий раз, когда будут осуществлять данный шаг.
Затем осуществляют переход на шаг 21, на котором вновь передают опрашивающие сигналы 8 режима S или подобные до тех пор, пока через одну дополнительную секунду станция 2 вновь не передаст синхронизирующие сигналы 11, содержащие время передачи, и через одну дополнительную минуту станция вновь не передаст синхронизирующие сигналы 11 с дополнительной информацией, относящиеся к каналу передачи между станцией 2 и одной или несколькими другими станциями 2.
Синхронизирующие сигналы 10, принимаемые станцией 2, а также синхронизирующие сигналы 11, транслируемые станцией 2, принимают или передают соответственно посредством радиоинтерфейса станции 2. Станция 2 всегда снабжена указанным интерфейсом для передачи широковещательных сигналов режима S или подобных в воздушное судно или приема указанных сигналов из него. То же самое аппаратное обеспечение, существующее в станциях 2, используется для синхронизации станций 2 системы 1 вторичной радиолокации. Таким образом, синхронизирующие сообщения передают в соответствии с режимом S, UAT или подобным стандартом.
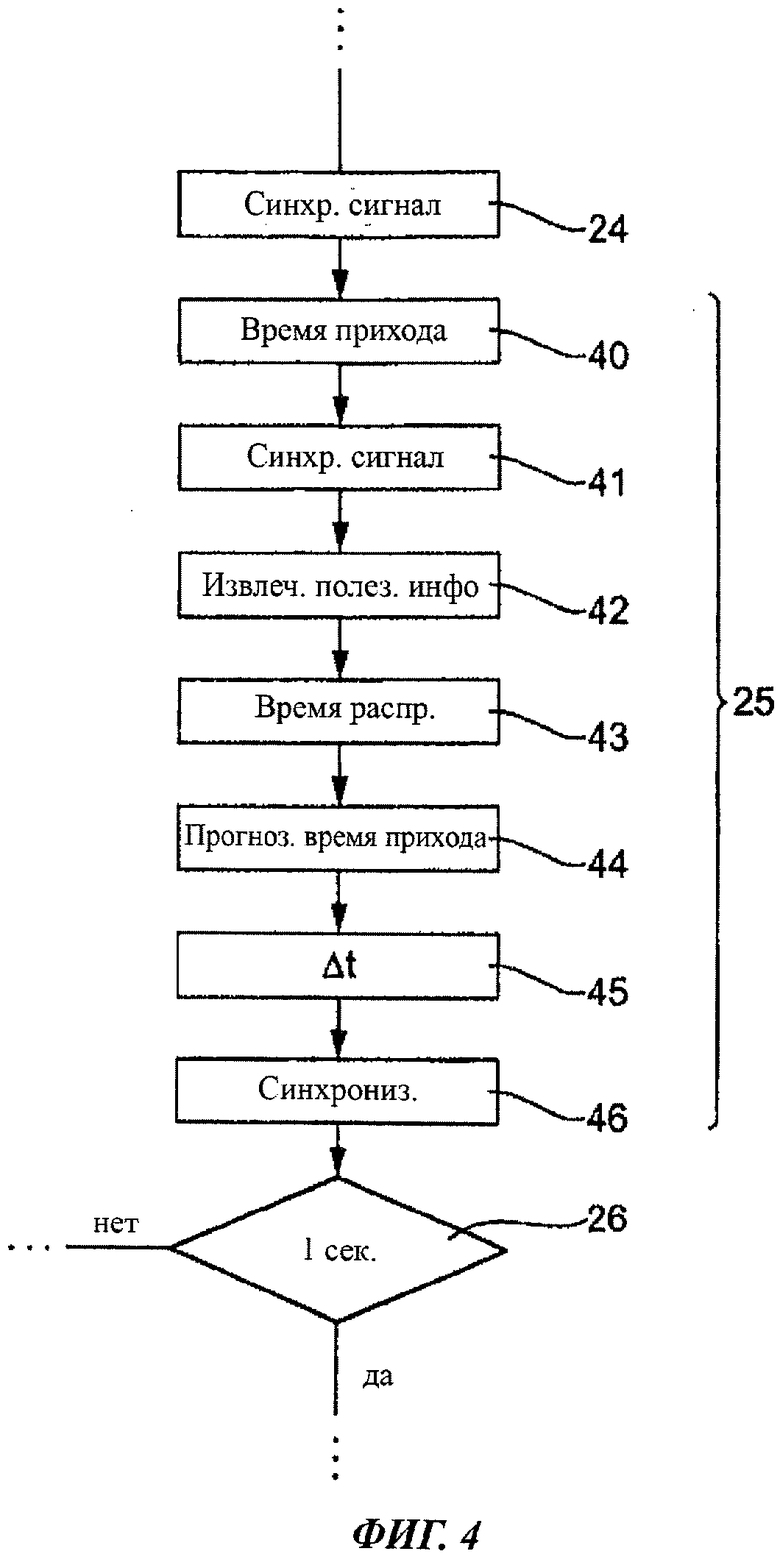
Далее со ссылкой на фиг.4 подробнее описан шаг 25 синхронизации часов местного времени принимающей станции с часами передающей станции. Синхронизацию станции 2 начинают на функциональном шаге 24 с приема пакетов данных режима S или подобных, транслируемых одной или несколькими станциями 2 системы 1 вторичной радиолокации. На функциональном шаге 40 определяют время прихода пакетов данных на основании временной базы часов местного времени принимающей станции 2 (несинхронизированной).
Затем на функциональном шаге 41 принятые пакеты данных идентифицируют как часть синхронизирующего сигнала 10. С целью идентификации пакеты данных, образующие часть синхронизирующего сигнала 10, могут содержать какой-либо идентификатор. В альтернативном варианте пакеты данных могут идентифицировать как образующие часть синхронизирующего сигнала 10 лишь по их контенту Принимающая станция 2 может определить, что пакеты данных содержат в их полезной части синхронизирующую информацию, например время передачи сигналов 10.
Затем на следующем функциональном шаге 42 из принятых пакетов данных извлекают полезную информацию, подлежащую использованию для синхронизации станции 2. Как указано ранее, эта информация может включать (но не ограничиваться):
- идентификатор станции 2, которая передала синхронизирующий сигнал 10;
- момент времени, когда синхронизирующий сигнал 10 был передан передающей станцией (время передачи);
- информацию о канале передачи между передающей станцией 2 и принимающей станцией 2;
- местоположение (например, данные GPS) передающей станции 2;
- информацию о том, с какими другими станциями 2 системы 1 вторичной радиолокации синхронизирована передающая станция 2; и
- информацию о качестве синхронизации передающей станции 2;
На функциональном шаге 43 определяют время, затраченное на передачу принятого синхронизирующего сигнала 10 из передающей станции 2 в принимающую станцию 2 (так называемое время распространения). Время распространения может быть определено различными способами. Например, его могут непосредственно извлечь из полезной части принятых пакетов данных, если это время передали как часть дополнительной информации в полезной части синхронизирующего сигнала. Если местоположение передающей станции 2 передали как часть дополнительной информации в полезной части синхронизирующего сигнала 10, могут определить расстояние между передающей и принимающей станциями 2 и следовательно время распространения. Если расстояние между передающей и принимающими станциями 2 передали как часть дополнительной информации в полезной части синхронизирующего сигнала 10, его могут извлечь из полезной части и следовательно могут определить время распространения. Наконец, идентификатор передающей станции 2 могут извлечь из принятого сигнала 10 и использовать для считывания времени распространения из базы данных, в которой хранят все значения времени распространения между всеми станциями 2 вторичной радиолокационной системы 1. Информацию о качестве канала передачи между передающей станцией 2 и принимающей станцией 2 могут использовать для повышения точности определения времени распространения.
После этого на функциональном шаге 44 вычисляют время прихода принятого сигнала 10 путем добавления времени передачи (эту информацию передали в полезной части принятого сигнала 10 и извлекли на шаге 42) к времени распространения, определенному на шаге 43. Время прихода, вычисленное на шаге 44, основано на временной базе передающей станции (синхронизированной).
На функциональном шаге 45 вычисляют величину корректировки для часов местного времени (несинхронизированного) принимающей станции 2. Это вычисление могут осуществить путем сравнения фактического времени прихода, определенного на шаге 40 (на основании временной базы принимающей станции 2 (несинхронизированной)) с прогнозируемым временем прихода, вычисленным на шаге 44 (на основании временной базы передающей станции (синхронизированной)). Разницу между этими двумя значениями времени прихода могут использовать как величину корректировки.
Наконец, на функциональном шаге 46 часы местного времени принимающей станции 2 синхронизируют с часами местного времени передающей станции 2 путем добавления величины корректировки, вычисленной на шаге 45, к локальной временной базе часов местного времени принимающей станции 2. Теперь принимающая станция 2 синхронизирована с передающей станцией 2 и может, в свою очередь, передавать синхронизирующие сигналы 10 для синхронизации других станций 2. Например, в вариантах осуществления, показанных на фиг.1 и 2, станцию С синхронизируют со станцией А. Затем станция С может передавать синхронизирующие сигналы 10, которые используют для синхронизации станции D. Таким образом, станцию D могут синхронизировать с временной базой станции А (посредством станции С), даже если станция D находится за пределами зоны покрытия станции А. Это позволяет сети станций 2 синхронизировать все станции 2 системы 1 вторичной радиолокации, расширенные на очень большую площадь, без необходимости организации кластеров с различными временными базами.
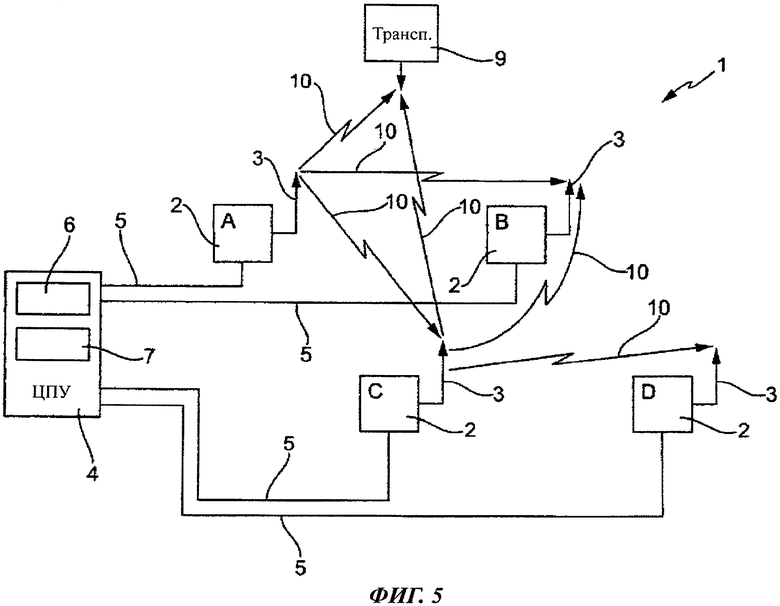
В соответствии с еще одним вариантом осуществления настоящего изобретения, показанным на фиг.5, транспондер 9 подвижного или находящегося в воздухе пользователя принимает синхронизирующие сигналы 10 из передающих вторичных радиолокационных станций, например радиолокационных станций А, С. Подвижный или находящийся в воздухе пользователь снабжен вычислительными средствами для определения текущего географического положения пользователя по информации, указывающей на время передачи синхронизирующих сигналов 10, извлеченной из принимаемых сигналов 10. Если транспондер 9 принимает синхронизирующие сигналы 10 из четырех или более вторичных радиолокационных станций, вычислительные средства могут точно вычислить местоположение пользователя по двум, а также по трем координатным осям. Однако если транспондер 9 принимает менее четырех сигналов 10 помимо принятых синхронизирующих сигналов 10 и информации о согласовании во времени, содержащейся в них, дополнительная информация из других средств определения местоположения, в частности дальномерной системы (Distance Measurement Equipment, DME), может использоваться для определения текущего географического положения подвижного или находящегося в воздухе пользователя для обеспечения полной функциональности двухмерной/трехмерной навигационной системы, полностью независимой от традиционных навигационных систем, например системы GPS и др. В этом случае вычислительные средства находящегося в воздухе пользователя обрабатывают информацию о согласовании во времени, содержащуюся в сигналах времени, транслируемых передатчиками А, С временного радиомаяка, а также дополнительную информацию из других средств определения местоположения, например дальномерной системы. Указанные вычислительные средства предпочтительно содержат одно или несколько вычислительных устройств, в которых выполняется компьютерная программа с целью определения местоположения находящегося в воздухе пользователя на основании информации о согласовании во времени из сигналов 10 и, возможно, дополнительной информации из дальномерной системы. В соответствии с этим вариантом осуществления один и тот же сигнал - синхронизирующий сигнал 10 - используется для синхронизации вторичных радиолокационных станций 2 системы 1 вторичной радиолокации, а также - по меньшей мере, локально в пределах досягаемости синхронизирующих сигналов 10 - для определения местоположения воздушных транспортных средств. Это обеспечивает преимущество, в частности вблизи аэропортов, где может быть существенно уменьшено количество радиочастотных сигналов, необходимых для синхронизации вторичных радиолокационных станций 2 и для обнаружения воздушного судна.
Для упрощения описания на фиг.5 опрашивающие сигналы 8 режима S не показаны, однако в варианте осуществления, показанном на фиг.5, они существуют, по меньшей мере, временно.
Изобретение относится к системе вторичной радиолокации для управления воздушным движением. Достигаемый технический результат - уменьшение количества радиочастотных сигналов, необходимых для синхронизации вторичных радиолокационных станций и для обнаружения воздушного судна. Система (1) вторичной радиолокации содержит множество вторичных радиолокационных станций (2) и выполнена с возможностью определения местоположения воздушного транспортного средства в пределах дальности, по меньшей мере, некоторых из вторичных радиолокационных станций (2) посредством измерения времени распространения сигналов (8) данных, передаваемых между вторичными радиолокационными станциями (2) и транспондером (9) воздушного транспортного средства. Каждая из вторичных радиолокационных станций (2) работает с синхронизированной локальной временной базой. С целью обеспечения высокоточной синхронизации радиолокационных станций (2) системы (1) вторичной радиолокации без кластеров предлагается синхронизировать вторичную радиолокационную станцию (2) в зависимости от контента синхронизирующих сигналов (10), принимаемых вторичной радиолокационной станцией (2), подлежащей синхронизации, и транслируемых одной из других вторичных радиолокационных станций (2) системы (1) вторичной радиолокации. Указанный контент предпочтительно содержит время передачи синхронизирующего сигнала (10). 2 н. и 14 з.п. ф-лы, 5 ил.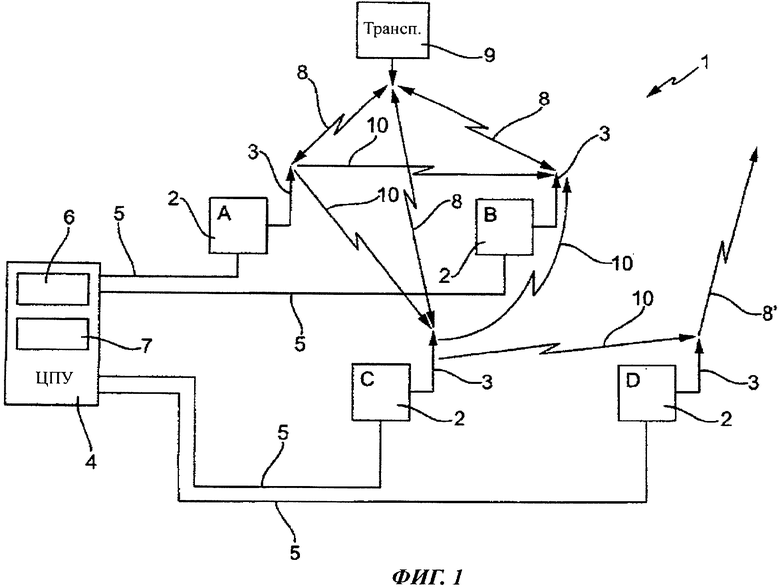
1. Система (1) вторичной радиолокации для управления воздушным движением, содержащая множество вторичных радиолокационных станций (2), расположенных в известных положениях, и транспондер (9) воздушного транспортного средства в пределах дальности обзора, по меньшей мере, некоторых из вторичных радиолокационных станций (2), при этом система (1) вторичной радиолокации выполнена с возможностью определения местоположения воздушного транспортного средства посредством измерения времени распространения сигналов (8) данных, передаваемых между вторичными радиолокационными станциями (2) и транспондером (9) воздушного транспортного средства, причем каждая из вторичных радиолокационных станций (2) работает с синхронизированной локальной временной базой, а вторичная радиолокационная станция (2) системы (1) вторичной радиолокации синхронизируется в зависимости от контента синхронизирующих сигналов (10), принимаемых вторичной радиолокационной станцией (2), подлежащей синхронизации, и транслируемых одной из других вторичных радиолокационных станций (2) системы (1) вторичной радиолокации, отличающаяся тем, что в полезной части синхронизирующих сигналов (10) содержится информация, указывающая на время передачи синхронизирующих сигналов (10), и транспондер (9) воздушного транспортного средства принимает синхронизирующие сигналы (10) из вторичных радиолокационных станций (2), и воздушное транспортное средство содержит вычислительные средства для определения своего текущего географического местоположения по информации, указывающей на время передачи синхронизирующих сигналов (10), принятых транспондером (9).
2. Система (1) вторичной радиолокации по п.1, отличающаяся тем, что синхронизирующие сигналы (10) состоят, по меньшей мере, из двух последовательно передаваемых пакетов данных, а значение времени передачи синхронизирующих сигналов (10) является частью контента второго из указанных двух последовательно передаваемых пакетов данных.
3. Система (1) вторичной радиолокации по п.2, отличающаяся тем, что значение времени передачи прогнозируется на основании информации, полученной из передачи первого из двух последовательно передаваемых пакетов данных.
4. Система (1) вторичной радиолокации по одному из пп.1-3, отличающаяся тем, что другие вторичные радиолокационные станции (2), которые транслируют синхронизирующие сигналы (10), измеряют разницу своих временных баз путем двухсторонних измерений посредством обмена синхронизирующими сигналами друг с другом.
5. Система (1) вторичной радиолокации по п.1, отличающаяся тем, что синхронизирующие сигналы (10) транслируются по радиоинтерфейсам, также используемым для связи с воздушным транспортным средством, местоположение которого подлежит определению.
6. Система (1) вторичной радиолокации по п.1, отличающаяся тем, что синхронизирующие сигналы (10) транслируются с использованием того же стандарта, который используется для связи с воздушным транспортным средством, местоположение которого подлежит определению.
7. Система (1) вторичной радиолокации по п.6, отличающаяся тем, что синхронизирующие сигналы (10) транслируются в соответствии со стандартом режима S, UAT или VDL.
8. Система (1) вторичной радиолокации по п.1, отличающаяся тем, что контент синхронизирующих сигналов (10) содержит дополнительную информацию, относящуюся к каналу передачи между принимающей вторичной радиолокационной станцией (2) и вторичной радиолокационной станцией (2), транслирующей синхронизирующие сигналы (10), в частности информацию, которая влияет на время распространения в канале передачи.
9. Система (1) вторичной радиолокации по п.8, отличающаяся тем, что дополнительная информация, относящаяся к каналу передачи, содержит информацию о других вторичных радиолокационных станциях (2), от которых вторичная радиолокационная станция (2), транслирующая синхронизирующие сигналы (10), принимает сигналы, и о качестве принятых сигналов.
10. Система (1) вторичной радиолокации по п.8 или 9, отличающаяся тем, что дополнительная информация, относящаяся к каналу передачи, определяется во вторичной радиолокационной станции (2), транслирующей синхронизирующие сигналы (10) посредством сигналов (11) данных, принятых в ней и транслированных вторичной радиолокационной станцией (2), принимающей синхронизирующий сигнал (10).
11. Система (1) вторичной радиолокации по п.8, отличающаяся тем, что дополнительная информация, относящаяся к каналу передачи, передается менее часто, чем информация, относящаяся ко времени передачи синхронизирующих сигналов (10).
12. Система (1) вторичной радиолокации по одному из пп.1-3, 5-9, 11, отличающаяся тем, что информация, относящаяся к местоположению передающей вторичной радиолокационной станции (2), является частью контента передаваемых синхронизирующих сигналов (10).
13. Система (1) вторичной радиолокации по одному из пп.1-3, 5-9, 11, отличающаяся тем, что, по меньшей мере, одна из вторичных радиолокационных станций (2) системы (1) вторичной радиолокации, в частности вторичная радиолокационная станция (2), подлежащая синхронизации, снабжена источником питания, содержащим батарею с возможностью перезарядки посредством солнечной панели.
14. Система (1) вторичной радиолокации по одному из пп.1-3, 5-9, 11, отличающаяся тем, что вторичные радиолокационные станции (2) выполнены с возможностью трансляции опрашивающих сигналов (8) данных и приема ответных сигналов (8) данных, содержащих информацию, относящуюся к воздушному транспортному средству и передаваемую транспондером (9) воздушного транспортного средства в ответ на принятый опрашивающий сигнал (8) данных, принятый транспондером (9), при этом ответные сигналы (8) данных, принимаемые вторичными радиолокационными станциями (2), направляются в центральный вычислительный блок (4) системы (1) вторичной радиолокации для определения местоположения воздушного транспортного средства, причем информация, относящаяся к воздушному транспортному средству, принимаемая от транспондера (9) воздушного транспортного средства, направляется в центральный вычислительный блок (4) по тому же беспроводному интерфейсу, по которому передаются синхронизирующие сигналы (10).
15. Система (1) вторичной радиолокации по одному из пп.1-3, 5-9, 11, отличающаяся тем, что помимо принятых синхронизирующих сигналов (10), другие средства определения положения, в частности дальномерная система, используются для определения текущего географического положения воздушных транспортных средств.
16. Способ управления воздушным движением посредством системы (1) вторичной радиолокации, содержащей множество вторичных радиолокационных станций (2), расположенных в известных положениях, и транспондер (9) воздушного транспортного средства в пределах дальности обзора, по меньшей мере, некоторых из вторичных радиолокационных станций (2), причем местоположение воздушного транспортного средства определяют посредством измерения времени распространения сигналов (8) данных, передаваемых между вторичными радиолокационными станциями (2) и транспондером (9) воздушного транспортного средства, а каждая из вторичных радиолокационных станций (2) работает с синхронизированной локальной временной базой, при этом способ содержит этапы, на которых:
принимают на вторичной радиолокационной станции (2), подлежащей синхронизации, синхронизирующие сигналы (10), транслируемые одной из других вторичных радиолокационных станций (2) системы (1) вторичной радиолокации; и
синхронизируют вторичную радиолокационную станцию (2), подлежащую синхронизации в зависимости от контента синхронизирующих сигналов (10),
отличающийся тем, что в полезной части синхронизирующих сигналов (10) содержится информация, указывающая на время передачи синхронизирующих сигналов (10); и способ дополнительно содержит этапы, на которых:
принимают транспондером (9) воздушного транспортного средства синхронизирующие сигналы (10) из вторичных радиолокационных станций (2); и
определяют на воздушном транспортном средстве его текущее географическое местоположение по информации, указывающей на время передачи синхронизирующих сигналов (10), принятых транспондером (9).
| СПОСОБ ИЗГОТОВЛЕНИЯ МЕТАЛЛИЧЕСКОГО ВОЛОКНА ИЗ РАСПЛАВА | 2003 |
|
RU2250154C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ С ОБЕСПЕЧЕНИЕМ ВОЗМОЖНОСТИ УСТАНОВЛЕНИЯ ПОДЛИННОСТИ ЗАПРОСНОГО СИГНАЛА | 2002 |
|
RU2242020C2 |
| Приспособление для предохранения от поломки носика челнока и порчи игольной пластинки швейной машины | 1933 |
|
SU36150A1 |
| Быстродействующий коммутационный аппарат | 1977 |
|
SU653643A1 |

