Изобретение относится к вторичной радиолокации, в частности к способам радиолокационного опознавания “свой-чужой”.
В известных системах радиолокационного опознавания “свой-чужой” [1-3] реализованы способы защиты системы от использования ее противником в своих целях, основанные на введении в излучаемый сигнал значения текущего времени или на применении псевдослучайной во времени схемы передачи сигналов. В запросно-ответной системе [1] используются зависящие от времени запросные и ответные коды. Это изобретение предназначено для решения проблемы пресечения или противодействия возможности имитации противником спецсигнала, оповещающего запросчик о наличии особой ситуации на ответчике. Поставленная цель достигается путем передачи ответного кода, который должен был бы передаваться в будущий период времени в условиях нормальной обстановки.
В системе опознавания [2], в основу концепции которой положена точная временная синхронизация всех объектов со средствами системы, все запросы и ответы излучаются в точно установленные, детерминированные, но псевдослучайные моменты времени суток, а в системе [3] осуществляется непрерывное изменение во времени запросных и ответных кодов в соответствии с заложенной программой.
Повышение эффективности системы опознавания “свой-чужой” при использовании информации о времени требует наличия на запросчиках и ответчиках датчиков точного времени и средств обеспечения синхронизации между блоками запросчика и ответчика.
Наиболее близким техническим решением является способ установления подлинности запросного сигнала, реализованный в режиме гарантированного опознавания системы опознавания “свой-чужой” [4], при котором в состав блоков запросчика и ответчика вводят датчик точного времени, и заключающийся в том, что на запросчиках в каждом цикле запрос-ответ формируют и излучают случайный запросный сигнал, для чего генерируют случайную двоичную последовательность, подвергают ее криптографической обработке по установленной программе, в процессе обработки случайной последовательности вводят и проверочную последовательность, известную запросчику и ответчику, из измененной таким образом случайной последовательности выделяют признак ответного кода (ПОК), в соответствии с которым устанавливают ожидаемый ответный код, кроме того, измененную случайную последовательность дополнительно кодируют двоичной последовательностью, соответствующей времени суток в секундном исчислении в момент формирования запросного сигнала, а на ответчике принимают запросный сигнал, выделяют из него информационную часть, на двоичную последовательность, соответствующую информационной части, по известному способу кодирования накладывают двоичную последовательность, соответствующую показаниям датчика времени ответчика в момент приема запросного сигнала в секундном исчислении, после снятия с двоичной последовательности информации о времени выделяют проверочную последовательность и ПОК. При совпадении выделенной проверочной последовательности с хранимой в криптовычислителе ответчика выносят решение о правильности запросного сигнала, закладывают этот запросный сигнал на хранение, а ответ излучают при поступлении следующего правильного запросного сигнала, отличающегося от хранимого, в соответствии с ПОК, выделенным из данного запроса.
Однако известный способ имеет следующие недостатки. Поскольку опорные генераторы датчиков времени, входящие в состав средств системы опознавания, независимы, их собственные частоты несколько различаются. Эта разность частот вызывает линейно возрастающую во времени погрешность [5] между генераторами, установленными на объектах.
Запросчик перед излучением шестнадцатого запросного сигнала формирует и излучает в открытой форме синхронизирующий сигнал, содержащий информацию о состоянии своей шкалы времени, обновляемой с периодом в 1 мс. Корректировка ответчиком, находящимся на дальности R, датчика времени в соответствии с содержанием синхронизирующего сигнала приводит к отклонению показаний датчика времени ответчика от эталонного на
Δ t=tR+δ f3·t+Δ к,
где tR - время распространения запросного сигнала до ответчика,
δ f3 - относительная погрешность датчика времени запросчика,
t - время, прошедшее с момента установки шкалы времени запросчика до излучения синхронизирующего сигнала,
Δ к - погрешность, вносимая дискретным представлением времени (ошибка квантования), в данном случае 0≤ Δ к≤1 мс.
Установка шкалы времени ответчиком по сигналам запросчика с указанной погрешностью Δ t и дальнейшее увеличение этой погрешности до следующей корректировки, вызванное нестабильностью собственного датчика времени, приводит к тому, что взаимодействующие объекты будут оперировать временем, принадлежащим к разным секундным интервалам, а это приводит к увеличению частоты браковки ответчиком запросных сигналов, следовательно, снижается надежность опознавания своего объекта.
Ответчик не контролирует количество запросов, поступающих от каждого запросчика, поэтому наличие перед правильным запросным сигналом синхросигнала с совпадающей секундной частью приводит к корректировке шкалы времени ответчика. Этим обстоятельством может воспользоваться противник для увода шкалы времени ответчиков относительно шкалы времени запросчиков, путем увеличения частоты посылок запросных сигналов с синхронизирующей частью, каждый раз внося изменения в 10 младших разрядов передаваемой в синхронизирующем сигнале информации о шкале времени запросчика, что существенно увеличивает вероятность работы запросчиков и ответчиков в разных секундных интервалах.
Периодическое, независимое от хода опознавания, прерывание процесса выдачи ответа запросчикам по срабатыванию мультивибратора, введенное для защиты от излучения ответа на случайно правильно сформированный запросный сигнал противника, приводит к снижению вероятности опознавания своего ответчика запросчиками.
Кроме того, постоянство в течение одной секунды вводимой в запросный сигнал информации о шкале времени запросчика позволяет противнику использовать разведанную совокупность запросных сигналов для решения своих задач в пределах этого дискрета времени.
В соответствии с заданной ситуацией на условия функционирования объектов со средствами системы опознавания ответчики с достаточно высокой вероятностью одновременно находятся в диаграммах направленности антенн (ДНА) нескольких запросчиков. Если ответчик выдает ответ на каждый второй правильный запросный сигнал, то такое ограничение ответности может оставить без ответа запросы некоторых запросчиков, а если предположить, что ответы передаются, начиная со второго правильного запросного сигнала, то чужой запросчик при формировании запросных сигналов “наугад” почти всегда найдет в запоминающем устройстве первый правильный запросный сигнал. Поэтому реализованная мера по ограничению возможностей противника не эффективна при нахождении ответчика в зоне действия многих запросчиков.
Указанные недостатки можно устранить при реализации в системе РЛО предлагаемого способа радиолокационного опознавания с обеспечением возможности установления подлинности запросного сигнала, который позволяет повысить достоверность опознавания своего объекта и уменьшить вероятность использования системы противником в своих целях, путем передачи в запросном сигнале шифрованной информации о состоянии всей шкалы времени в момент формирования сигнала, при этом показания датчика времени существенно изменяются от запроса к запросу за счет уменьшения дискреты времени; проверки ответчиком правильности принятой в запросном сигнале информации, следовательно, и запросного сообщения по совпадению моментов излучения и приема сигнала в установленных пределах, определяемых интервалом изменения суммы случайных величин: естественного расхождения шкал времени после их установки и задержки на прохождение сигнала между взаимодействующими объектами; вычисления разности показаний датчиков времени и запоминания ответчиком на время нахождения в ДНА запросчика реализации указанной случайной величины в качестве признака данного запросчика; использования в дальнейшем запомненного признака для идентификации поступающей от данного запросчика информации, отнеся ее к реализации стационарного случайного процесса с нулевым средним, описываемого изменениями величины задержки сигнала между циклами опознавания и кратковременными нестабильностями датчиков времени, и прекращения формирования ответных сигналов сопровождаемому запросчику после выдачи установленного количества ответов.
Это достигается тем, что в известный способ, при котором в состав блоков запросчика и ответчика вводят средства обеспечения точным временем и заключающийся в том, что на запросчике в каждом цикле запрос-ответ формируют и излучают случайный запросный сигнал, для чего путем криптографической обработки по известной запросчику и ответчику программе случайной двоичной последовательности, используемой при формировании информационной части запросного сигнала, выделяют признак ответного кода, в соответствии с которым устанавливают ожидаемый ответный код, принимают на ответчике запросный сигнал, выделяют из него информационную часть, на основе криптографической обработки по известной программе информационной части правильного запросного сигнала выделяют признак ответного кода и запоминают соответствующий этому признаку ответный код, вносят следующие дополнения.
На запросчике и ответчике точное время суток в двоичном формате обеспечивается датчиками времени, показания которых изменяются с периодом, существенно меньшим периода следования запросных сигналов. При необходимости опознавания запросчик двоичную последовательность, соответствующую показаниям датчика времени t3 в момент формирования запросного сигнала, вводит в криптовычислитель и преобразовывает эту последовательность по установленному алгоритму в другую случайную последовательность такой же длины, которая формирует импульсную последовательность информационной части запросного сигнала.
На ответчике в соответствии с известными точностными характеристиками применяемых датчиков времени и дальностью действия запросчиков (определяет величину задержки на распространение) устанавливают и запоминают пороговое значение отклонения показаний датчика времени ответчика в момент приема запросного сигнала от показаний датчика времени запросчика в момент формирования запросного сигнала (Δ T), при котором гарантируют малую вероятность превышения абсолютной величиной разности показаний датчиков времени порогового значения при правильном преобразовании времени запросчиком. Кроме того, на ответчике вводят каналы для раздельной обработки информации, поступающей от запросчиков, в диаграммах направленности антенн которых он одновременно находится. При этом в каждом канале обработки информации по вероятностным характеристикам изменения отклонения шкал времени образовавшейся пары запросчик-ответчик за время опознавания устанавливают и запоминают пороговое значение разности отклонений показаний датчика времени ответчика от показаний датчика времени одного и того же запросчика за время между циклами запрос-ответ (Δ τ ), устанавливают и запоминают требуемое количество ответов, при котором с заданной надежностью гарантируется положительное опознавание ответчика, устанавливают критерий принятия решения о выходе из диаграммы направленности антенны запросчика.
На ответчике при приеме запросного сигнала фиксируют показания собственного датчика времени в момент приема сигнала t0, осуществляют обратное преобразование в криптовычислителе двоичной последовательности, выделенной из информационной части запросного сигнала, и восстанавливают показания датчика времени запросчика в момент формирования запросного сигнала t3, из t0 вычитают t3, абсолютное значение полученной разности |Δ t1| сравнивают с запомненным пороговым значением Δ T и при |Δ t1|≤ Δ Т применяют решение о правильности запросного сообщения, а значение Δ t1 со знаком как идентификатор данного запросчика запоминают в одном из каналов обработки информации, с занятием канала обработки информации запускают канальную схему управления сбросом, где начинают отсчет времени, в пределах которого отсутствуют правильные запросы от данного запросчика.
На ответчике принимают следующий запросный сигнал, вычисляют новую разность Δ t2, проверяют правильность запросного сообщения, при установлении правильности сообщения вновь определенный идентификатор Δ t2 сравнивают с идентификаторами, запомненными в занятых каналах, для чего определяют величину отклонения значения Δ t2 от значений идентификатора Δ t1 путем вычисления их разности, сравнивают абсолютную величину этой разности с запомненным пороговым значением отклонения Δ τ и при выполнении неравенства |Δ t2-Δ t1|≤ Δ τ формируют сигнал разрешения выдачи ответного сигнала, излучают ответный сигнал. Этим же сигналом разрешения в канале открывают счет выданных ответов и переводят схему управления сбросом в исходное состояние, замещают идентификатор Δ t1 на Δ t2. После выдачи запросчику требуемого количества ответов выходным сигналом канального счетчика ответов запрещают формирование и излучение ответных сигналов на запросные сигналы, продолжающие поступать от данного запросчика в канал обработки информации, отслеживают прекращение их поступления и по отсутствию правильных запросных сигналов в течение установленного времени схема управления сбросом формирует выходной сигнал, которым снимают занятость канала обработки информации.
При |Δ t2-Δ t1|&γτ; Δ τ фиксируют поступление запросного сигнала от нового запросчика и запоминают Δ t2 как его идентификатор в свободном канале блока обработки информации.
На фиг.1-3 приведен вариант структурной схемы устройства, реализующего предложенный способ радиолокационного опознавания с обеспечением возможности установления подлинности запросного сигнала, в системе РЛО.
Согласно способу на запросчике и ответчике точное время суток в двоичном формате обеспечивается датчиками времени, показания которых изменяются с периодом, существенно меньшим периода следования запросных сигналов. При необходимости опознавания на запросчике двоичную последовательность, соответствующую показаниям датчика времени t3 в момент формирования запросного сигнала, как случайное число вводят в криптовычислитель, где путем обработки по установленной программе выделяют признак ответного кода и преобразовывают эту последовательность в другую случайную последовательность такой же длины, преобразованную двоичную последовательность используют при составлении информационной части запросного сигнала, формируют и излучают запросный сигнал, а в соответствии с выделенным ПОК устанавливают и запоминают ожидаемый ответный код.
На ответчике в соответствии с известными точностными характеристиками применяемых датчиков времени и дальностью действия запросчиков устанавливают и запоминают пороговое значение отклонения показаний датчика времени ответчика в момент приема запросного сигнала от показаний датчика времени запросчика в момент формирования запросного сигнала (Δ T), при котором гарантируют заданную вероятность совпадения показаний датчиков времени при правильном преобразовании времени запросчиком, вводят многоканальный блок обработки информации, поступающей от запросчиков, в диаграммах направленности антенн которых ответчик одновременно находится. В каждом канале обработки информации в соответствии с вероятностными характеристиками изменения отклонения шкал времени образовавшейся пары запросчик-ответчик за время опознавания устанавливают и запоминают пороговое значение разности отклонений показаний датчика времени ответчика от показаний датчика времени одного и того же запросчика за время между циклами запрос-ответ, устанавливают и запоминают требуемое количество ответов, при котором с заданной надежностью гарантируется положительное опознавание ответчика, устанавливают критерий принятия решения о выходе из диаграммы направленности антенны запросчика.
На ответчике принимают и дешифрируют запросный сигнал, фиксируют показания собственного датчика времени в момент приема сигнала t0, путем криптографической обработки информационной части сигнала выделяют ПОК, в соответствии с которым устанавливают ответный код, осуществляют обратное преобразование двоичной последовательности, выделенной из информационной части, восстанавливают показания датчика времени запросчика в момент формирования запросного сигнала t3, из t0 вычитают t3, абсолютное значение полученной разности |Δ t1| сравнивают с Δ T и при |Δ t1|≤ Δ T принимают решение о правильности запросного сообщения, а значение Δ t1 со знаком как идентификатор данного запросчика запоминают в одном из каналов блока обработки информации. С занятием канала обработки информации запускают канальную схему управления сбросом, где начинают отсчет времени, в пределах которого отсутствуют правильные запросы от данного запросчика.
На ответчике принимают следующий запросный сигнал, как и прежде, осуществляют криптографическую обработку информационной части принятого запросного сигнала, по выделенной из запросного сигнала информации о показаниях датчика времени запросчика в момент формирования сигнала и по показаниям собственного датчика времени в момент приема данного запросного сигнала вычисляют разность показаний датчиков времени Δ t2, проверяют правильность запросного сообщения.
При установлении правильности сообщения вновь определенный идентификатор Δ t2 сравнивают с идентификаторами, запомненными в занятых каналах обработки информации, для чего определяют величину отклонения значения Δ t2 от значений идентификатора путем вычисления их разности, сравнивают абсолютную величину этой разности с запомненным пороговым значением отклонения Δ τ и при выполнении неравенства |Δ t2-Δ t1|≤ Δ τ формируют сигнал разрешения выдачи ответного сигнала, в соответствии с установленным ответным кодом формируют и излучают ответный сигнал. Этим же сигналом разрешения в канале открывают счет выданных ответов и переводят схему управления сбросом в исходное состояние, замещают идентификатор Δ t1 на Δ t2. После выдачи запросчику требуемого количества ответов выходным сигналом канального счетчика ответов запрещают формирование и излучение ответных сигналов на запросные сигналы, продолжающие поступать от данного запросчика в канал обработки информации, отслеживают прекращение их поступления и по отсутствию правильных запросных сигналов в течение установленного времени формируют выходной сигнал, которым снимают занятость канала обработки информации.
При несовпадении в допустимых пределах Δ t2 ни с одним из запомненных идентификаторов фиксируют поступление запросного сигнала от нового запросчика и запоминают Δ t2, как его идентификатор, в свободном канале блока обработки информации.
Использование предлагаемого способа с обеспечением возможности установления подлинности запросного сигнала обеспечивает по сравнению с существующими способами следующие преимущества:
1. Передача в запросном сигнале шифрованной информации о состоянии всей шкалы времени в момент формирования сигнала, существенно изменяющейся от запроса к запросу за счет уменьшения кванта времени, проверка ответчиком правильности запросного сигнала по совпадению в установленных пределах показаний датчиков времени запросчика и ответчика в моменты формирования и приема сигнала и выбор пределов совпадения в соответствии с интервалом изменения суммы случайных величин: естественного расхождения шкал времени с момента их установки и задержки сигнала на прохождение от запросчика до ответчика, существенно уменьшают вероятность браковки ответчиком запросного сигнала, что приводит к повышению надежности опознавания запросчиком своего объекта.
2. Запоминание ответчиком вычисленной разности показаний датчиков времени запросчика и ответчика, входящей в допустимый интервал изменения указанной выше суммы случайных величин, в качестве идентификатора запросчика, претерпевающего незначительные изменения в промежутке времени между циклами запрос-ответ за счет кратковременных нестабильностей датчиков времени и приращения времени задержки сигнала, позволяет ответчику раздельно обрабатывать информацию от запросчиков, в ДНА которых он находится, ограничивать число выданных ответов каждому из них гарантированным количеством и следить за временем нахождения в их ДНА. Прекращение излучения ответных сигналов после выдачи запросчику установленного количества ответов уменьшает суммарный поток ответных сигналов, следовательно, повышается надежность опознавания за счет уменьшения внутрисистемного потока ответных сигналов. Кроме того, ограничение ответности без нарушения естественного процесса опознавания не отражается в надежности опознавания. Реализация возможности контроля ответчиком за процессом взаимодействия с запросчиками уменьшает возможности противника по использованию ретранслируемых запросных сигналов для вызова необходимого количества ответов от выбранного объекта.
3. Существенно сокращается временной промежуток, в пределах которого противник может воспользоваться разведанной последовательностью запросных сигналов. Указанный временной промежуток не превышает протяженности “серой зоны”, определяемой, в основном, погрешностью, вызванной нестабильностью опорных генераторов и задержкой сигнала на распространение.
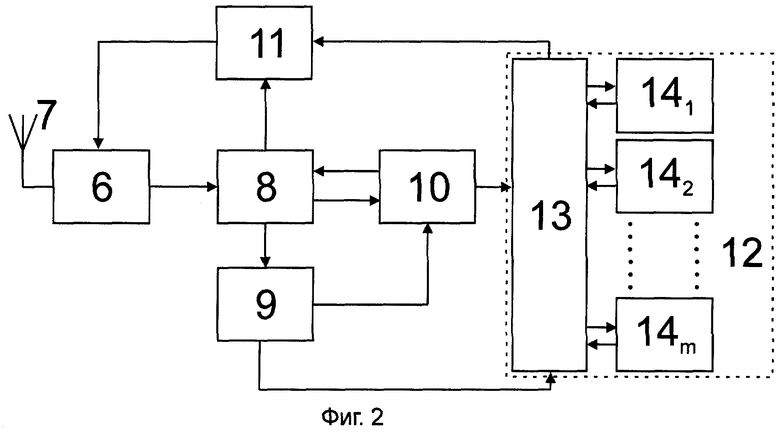
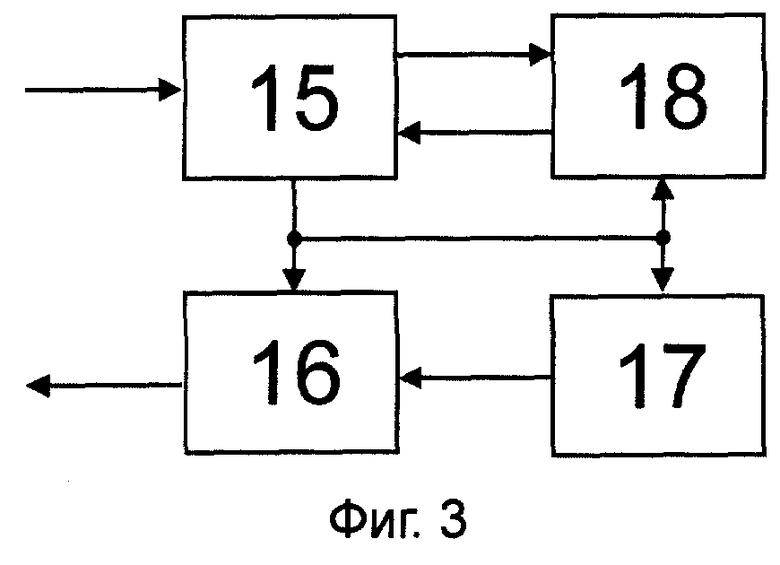
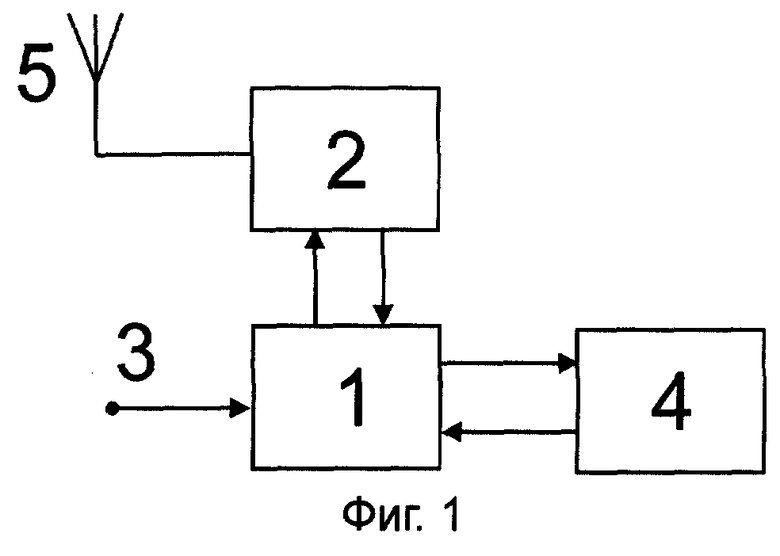
На фиг.1-3 приведен вариант структурной схемы устройства, реализующего предложенный способ. При этом на фиг.1 приведена структурная схема составной части устройства-запросчика, на фиг.2 приведена структурная схема ответчика, а на фиг.3 приведена структурная схема одного из каналов обработки ответчиком поступающей от запросчика информации.
Запросчик (фиг.1) содержит криптовычислитель 1, приемопередатчик 2, 3 - вход синхронизирующего импульса РЛС, датчик времени 4, антенну 5, ответчик (фиг.2) содержит приемопередатчик 6, антенну 7, криптовычислитель 8, датчик времени 9, вычислитель 10, формирователь ответа 11, блок обработки 12 информации, поступающей от запросчиков, узел управления 13, каналы обработки 141-14m информации, каждый канал обработки информации (фиг.3) содержит канальный вычислитель 15, пропускной каскад 16, счетчик ответов 17, схему управления сбросом 18 канала.
Возникающие различия в вариантах структурных схем устройства связаны, в основном, с построением ответчика и определяются используемым ответчиком в качестве идентификатора запросчика параметром (расхождение шкал времени ответчика и запросчика или ведомая на ответчике шкала времени запросчика после приема информации о состоянии шкалы времени запросчика на момент формирования запросного сигнала) и распределением вычислительных средств.
Приводимый в качестве примера вариант структурной схемы устройства соответствует случаю, когда ответчиком в качестве идентификатора запросчика используется величина расхождения шкал времени ответчика и запросчика, вычисленная как разность показаний датчика времени запросчика, информация о котором содержится в принятом запросном сигнале, и ответчика в момент приема этого сигнала, а вычислительные средства выделены раздельно для каждой выполняемой функции: криптографический вычислитель, общий вычислитель и канальные вычислители.
Устройство, приведенное на фиг.1-3, реализует предложенный способ следующим образом.
На запросчике с приходом синхронизирующего импульса РЛС на вход 3 запускается криптовычислитель 1, который своим выходным сигналом, поступающим с первого выхода на вход датчика времени 4, разрешает прохождение двоичной последовательности, изменяющейся с периодом в 1 мкс и соответствующей показаниям датчика времени 4, в криптовычислитель 1. Путем обработки по установленной программе этой последовательности, соответствующей моменту формирования запросного сигнала t3, криптовычислитель 1 выделяет и запоминает признак ответного кода и преобразует ее в другую последовательность той же длины. Преобразованная двоичная последовательность поступает в приемопередатчик 2, где на основе этой последовательности составляют информационную часть запросного сигнала. Сформированный запросный сигнал с помощью приемопередатчика 2 и антенны 5 излучается.
На ответчике (фиг.2) с помощью антенны 7 и приемопередатчика 6 принимают и обрабатывают запросный сигнал. Выделенную из запросного сигнала преобразованную двоичную последовательность вводят в криптовычислитель 8, где путем обратного преобразования восстанавливают t3 запросчика, которое с выхода криптовычислителя 8 поступает в вычислитель 10. Сигналом с другого выхода, соединенного со входом датчика времени 9, криптовычислитель 8 разрешает съем показания датчика времени 9 ответчика t0, соответствующего моменту приема запросного сигнала, и их прохождение в вычислитель 10. Вычислитель 10 вычисляет разность Δ t1=t0-t3, сравнивает абсолютное значение этой разности с установленным пороговым значением Δ T и при выполнении неравенства |Δ t1|≤ Δ T выносит решение о правильности запросного сигнала, выходным сигналом разрешает криптовычислителю 8 обработку восстановленной двоичной последовательности на выделение признака ответного кода. Величина устанавливаемого в вычислителе 10 порога Δ Т определяется, в основном, как интервал изменения суммы случайных величин: возможного расхождения шкал времени запросчика и ответчика за время между двумя сверками Тсв при относительных нестабильностях δ f3 и δ f0 установленных в датчиках времени опорных генераторов и возможной задержки на прохождение tзад сигнала между взаимодействующими объектами, следовательно, Δ Т=(δ f3+δ f0)Тсв+tзад. Значение Δ t1 со знаком с другого выхода вычислителя 10 поступает в блок обработки 12, где с помощью узла управления 13 каналами обработки 141-14m занимает один из свободных каналов и запоминается в вычислителе 15 этого канала как идентификатор данного запросчика. С занятием канала обработки информации узел управления 13 пропускает тактовые импульсы с датчика времени 9 в схему управления сбросом 18 канала, которая формирует сигнал очистки канала при отсутствии информации от запросчика с запомненным идентификатором в течение установленного времени tcб.
Выделенный криптовычислителем 8 признак ответного кода поступает в формирователь ответного кода 11, который формирует ответный код при поступлении сигнала разрешения ответа на другом входе, соединенном с выходом узла управления 13. При выходе значения Δ t1 за пределы установленного порога Δ Т запросный сигнал принимают за ложный, признак ответного кода из t3 криптовычислителем 8 не выделяется, а значение Δ t1 стирается.
Ответчик, который одновременно находится в ДНА нескольких запросчиков, после приема следующего запросного сигнала выполняет все приведенные выше операции над поступившей информацией, которые заканчиваются вычислением очередного Δ t2, проверкой правильности запросного сигнала и выделением признака ответного кода, соответствующего поступившему запросному сигналу, при выполнении неравенства |Δ t2|≤ Δ T. Выделенный признак ответного кода поступает в формирователь ответного кода 11, который формирует ответный код при поступлении сигнала разрешения ответа с узла управления 13, а ранее установленный признак ответного кода, по которому не был сформирован ответный сигнал, замещается этим ПОК. Узел управления 13 каналами блока обработки 12 направляет Δ t2 в вычислители 15 занятых каналов, где вычисляется разность Δ ψ =Δ t2-Δ t1, абсолютное значение этой разности сравнивают с установленным в канальных вычислителях 15 пороговым значением Δ τ и при выполнении неравенства |Δ ψ |≤ Δ τ в одном из каналов вычислитель 15 этого канала замещает Δ t1 на Δ t2 и вырабатывает сигнал, разрешающий формирование ответного сигнала, который через пропускной каскад 16 и узел управления 13 поступает в формирователь ответа 11 и разрешает формирование ответного сигнала в соответствии с установленным признаком ответного кода. Ответный сигнал с помощью приемопередающего устройства 6 и антенны 7 излучается. Тот же сигнал, разрешающий формирование ответа, поступает в счетчик ответов 17 и схему управления сбросом 18. Счетчик 17 по этому сигналу фиксирует излучение ответа данному запросчику, а схема управления сбросом 18 переходит в исходное состояние.
При установлении канальными вычислителями, что |Δ ψ |&γτ; Δ τ , узел управления 13 для Δ t2 занимает свободный канал обработки, где эта разность запоминается как идентификатор очередного запросчика.
Величину порога Δ τ устанавливают с учетом диапазона расхождения показаний датчиков времени ответчика и взятого на сопровождение запросчика (δ f0+δ f3)toп, диапазона изменений задержки сигнала между циклами запрос-ответ Δ tзад и величины кванта времени Δ к, следовательно, Δ τ ≤ Δ tзап+(δ f0+δ f3)toп+2Δ к, а учитывая кратковременность времени опознавания toп, незначительность изменения дальности между циклами запрос-ответ и принятой схемой замещения запомненного значения идентификатора на вновь вычисленный можно принять
Δ τ =2Δ к.
Счетчик ответов 17, объем счета которого установлен равным количеству ответов, необходимых для надежного опознавания ответчика, при достижении установленного объема счета формирует строб запрета, который поступает с выхода счетчика 17 на другой вход пропускного каскада 16 и запрещает прохождение сигнала разрешения выдачи ответа, поступающего с канального вычислителя 15, до сброса канала.
Канальный вычислитель 15 в процессе обработки поступающей от данного запросчика последовательности запросных сигналов определяет период следования сигналов tп как минимальное временное расстояние между двумя запросными сигналами и устанавливает время сброса канала tсб=Ntп, где N - число подряд идущих отсутствий запросных сигналов от данного запросчика, при котором ответчиком надежно фиксируется факт выхода из зоны действия запросчика.
При отсутствии запросных сигналов после занятия канала tсб ограничивается установленным tсб max.
По истечении времени tсб схема управления сбросом 18 формирует сигнал сброса канала, которым возвращает канал в исходное состояние.
Источники информации
1. Wagner G. Answer device for an interrogation. Answer system having time dependent differing codes and provision of special signal means. Патент США №3860922, М.кл.2 G 01 S 91/56, 1975 г.
2. Bridge W.M. IFF System concept based on time synchronization. /IEEE Transactions on Communications, vol. COM-28, №9, 1980, p.1630-1637.
3. Stein  Interrogator-responsor systen. Патент США №4194201, М.кл.2 G 01 S 9/56, 1980 г.
Interrogator-responsor systen. Патент США №4194201, М.кл.2 G 01 S 9/56, 1980 г.
4. Parker C.V., Hovey J.M. IFF Authentication system. Патент США №5101208, МКИ5 G 01 S 13/78, 1992 г.
5. Линдсей У.С. и др. Синхронизация сетей. /ТИИЭР, т.73, №10, 1985, с.6-31.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ повышения надежности опознавания в радиолокационной системе активного запроса-ответа | 2020 |
|
RU2746175C1 |
| СИСТЕМА ОПОЗНАВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2254596C2 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2000 |
|
RU2189610C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ И ПЕРЕДАЧИ ИНФОРМАЦИИ В ОТВЕТНОМ КАНАЛЕ СИСТЕМЫ РАДИОЛОКАЦИОННОГО ОПОЗНАВАНИЯ | 2013 |
|
RU2543514C2 |
| МОБИЛЬНЫЙ РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК | 2009 |
|
RU2420757C1 |
| Вторичная радиолокационная система | 1976 |
|
SU671515A1 |
| СПОСОБ ВЫРАБОТКИ НАВИГАЦИОННО-ПИЛОТАЖНОЙ ИНФОРМАЦИИ ДЛЯ СУДОВ И ОТВЕТЧИК | 1993 |
|
RU2075763C1 |
| СИСТЕМА ОПОЗНАВАНИЯ "СВОЙ-ЧУЖОЙ" | 2001 |
|
RU2191403C1 |
| РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК ПЕРЕНОСНОГО КОМПЛЕКСА | 2009 |
|
RU2420758C1 |
| НАЗЕМНЫЙ РАДИОЛОКАЦИОННЫЙ ЗАПРОСЧИК ПЕРЕДВИЖНОГО КОМПЛЕКСА | 2009 |
|
RU2439610C2 |
Изобретение позволяет с высокой достоверностью опознать свой объект и существенно ограничить возможности противника по использованию разведанной и ретранслируемой последовательности запросных сигналов путем обеспечения средств системы опознавания стабильными электронными датчиками времени, передачей в запросном сигнале шифрованной информации о состоянии шкалы времени запросчика в момент формирования сигнала и осуществления ответчиком проверки правильности переданной информации по совпадению ее в установленных пределах с показаниями собственного датчика времени и реализацией для этой проверки двухпороговой схемы, учитывающей точностные характеристики применяемых датчиков времени, время задержки сигнала на распространение и характер изменения во времени расхождения показаний датчиков времени взаимодействующих объектов. Предложенный принцип использования на ответчике в качестве идентификаторов запросчиков, взаимодействующих с ним в данный момент, величины расхождения показания собственного датчика времени и показаний датчиков времени запросчиков позволяет ответчику контролировать процесс взаимодействия с запросчиками путем ограничения выдачи ответов каждому из них установленным количеством, при котором гарантируется надежное опознавание объекта, и прекращения обслуживания запросчика по выполнению установленного критерия обнаружения выхода из его ДНА, что и является достигаемым техническим результатом. 3 ил.
Способ радиолокационного опознавания с обеспечением возможности установления подлинности запросного сигнала, при котором в состав блоков запросчика и ответчика вводят датчики точного времени, заключающийся в том, что на запросчике в каждом цикле запрос-ответ формируют и излучают случайный запросный сигнал, для чего путем криптографической обработки по известной запросчику и ответчику программе случайной двоичной последовательности, используемой при формировании информационной части запросного сигнала, выделяют признак ответного кода, в соответствии с которым устанавливают ожидаемый ответный код, принимают на ответчике запросный сигнал, выделяют из него информационную часть, на основе криптографической обработки по известной программе информационной части правильного запросного сигнала выделяют и запоминают признак ответного кода, отличающийся тем, что на запросчике двоичную последовательность, соответствующую показаниям датчика времени t3 в момент формирования запросного сигнала, вводят в криптовычислитель, преобразовывают по установленному алгоритму в другую случайную последовательность такой же длины, которая формирует импульсную последовательность информационной части запросного сигнала, на ответчике запоминают пороговое значение отклонения показаний датчика времени ответчика в момент приема сигнала от показаний датчика времени запросчика в момент формирования запросного сигнала (ΔT), задействуют каналы обработки информации, поступающей от запросчиков, в диаграммах направленности антенн которых ответчик находится, в каждом канале обработки запоминают пороговое значение разности отклонений показаний датчика времени ответчика от показаний датчика времени одного и того же запросчика за время между циклами запрос-ответ (Δτ), устанавливают требуемое количество ответов, при котором с заданной надежностью гарантируется положительное опознавание ответчика, и критерий принятия решения о выходе из диаграммы направленности антенны запросчика, фиксируют показание собственного датчика времени в момент приема запросного сигнала to, осуществляют обратное преобразование в криптовычислителе двоичной последовательности, выделенной из информационной части запросного сигнала, и восстанавливают показание датчика времени запросчика в момент формирования запросного сигнала t3, из to вычитают t3, абсолютное значение полученной разности |Δt1| сравнивают с Δt и при непревышении |Δt1| порогового значения принимают решение о правильности запросного сообщения, а значение Δt1 со знаком как идентификатор данного запросчика запоминают в одном из каналов обработки информации, запускают канальную схему управления сбросом, где ведут отсчет времени, в пределах которого отсутствуют правильные запросы от данного запросчика, принимают и обрабатывают следующий запросный сигнал, вычисляют разность Δt2, проверяют правильность запросного сообщения, при установлении правильности сообщения Δt2 сравнивают с ранее запомненными идентификаторами, для чего определяют величину отклонения значения Δt2 от значения идентификатора Δt1 путем вычисления их разности, сравнивают абсолютную величину этой разности с запомненным пороговым значением отклонения Δτ и при выполнении неравенства |Δt2-Δt1|≤Δτ формируют сигнал разрешения выдачи ответного сигнала, устанавливают ответный код в соответствии с выделенным признаком ответного кода, излучают ответный сигнал, этим же сигналом разрешения в канале открывают счет выданных ответов и переводят схему управления сбросом в исходное состояние, замещают идентификатор Δt1 на Δt2; при несовпадении в допустимых пределах Δt2 с Δt1 фиксируют поступление запросного сигнала от другого запросчика и запоминают Δt2 как идентификатор этого запросчика в свободном канале обработки информации, после выдачи запросчику требуемого количества ответов выходным сигналом канального счетчика ответов запрещают формирование и излучение ответных сигналов на запросные сигналы, продолжающие поступать в данной канал обработки информации, отслеживают прекращение их поступления и по отсутствию правильных запросных сигналов в течение установленного времени формируют выходной сигнал, которым снимают занятость канала обработки информации.
| US 5101208 А, 31.03.1992 | |||
| RU 96103118 А, 20.05.1998 | |||
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗАПРОСА - ОТВЕТА И ЗАПРОСЧИК ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1989 |
|
RU2029971C1 |
| US 5486830 А, 23.01.1996 | |||
| US 6081222 А, 27.06.2000 | |||
| DE 3240904 C1, 05.12.2002. | |||

