Область техники, к которой относится изобретение
Настоящее изобретение относится к оптическому зонду, пригодному для миниатюрных применений.
Уровень техники изобретения
В связи с диагностикой различных болезней, таких как различные раковые заболевания, берутся биопсии. Когда биопсия взята и никакие злокачественные клетки не обнаруживаются, важно, чтобы можно было исключить, что этот результат имеет место не из-за того, что проба биопсии была просто взята из неправильного места. Чтобы повысить уверенность в результате взятия биопсии, может использоваться направленная биопсия. Такое направленное взятие биопсии может основываться на множестве способов получения изображения, среди которых, например, рентгенография, компьютерная томография (CT), магнитно-резонансная томография (MRI), ультразвуковые и оптические способы.
Для многих целей используется оптическое получение изображения при помощи миниатюрного игольчатого микроскопа. Получение изображения при помощи игольчатой микроскопии обладает тем преимуществом, что при этом не применяется вредное рентгеновское излучение или дорогостоящее оборудование CT- или MRI-сканеров. Кроме того, оно поддерживает интегрирование непосредственно в биопсийную иглу, обеспечивая, таким образом, прямой визуальный осмотр места биопсии до, во время и после биопсии.
В предшествующем уровне техники системы оптических зондов для медицинских применений сканируют в поле обзора с помощью оптоволоконной системы с электромагнитным приводом, которая используется для сканирования в поле обзора. Все поле обзора сканируется с частотой сканирования, совпадающей с частотой механического резонанса движущихся частей оптоволоконной системы. Тем самым возможно получить эффективное сканирование с использованием ограниченного тока привода, что означает, что разумная скорость сканирования может быть получена при ограниченном выделении тепла, рассеиваемого миниатюрными катушками привода.
Однако автор данного изобретения понял, что в упомянутой системе оптического зонда предшествующего уровня скорость сканирования ограничивается ограниченной частотой сканирования, которая опять же влияет на время, требующееся для достаточного сканирования изображения, являющееся важным фактором в рамках медицинских применений.
Документ US 2008/0265178 А1 раскрывает систему оптического зонда, в которой консольные оптические волокна вибрируют и в одном варианте осуществления предлагается понижать частоту сканирования от верхней частоты, превышающей резонансную частоту, вниз к резонансной частоте.
Документ US 2008/0218824 А1 раскрывает систему сканирования, позволяющую высокие частоты кадров, удаляя хранящуюся энергию из вибрирующего сканирующего элемента, чтобы быстро вернуть сканирующий элемент в его начальное положение.
Сущность изобретения
Может быть предпочтительным получить систему оптического зонда, пригодную для использования в миниатюрном медицинском устройстве, способном обеспечивать высокую скорость сканирования, к тому же без проблем с теплотой, выделяемой элементами привода. Особенно должно быть желательным получить скорость сканирования, превышающую скорость, которая может быть получена сканированием поля обзора с частотой сканирования, равной частоте механического резонанса движущихся частей. Повышенная скорость сканирования может использоваться для предоставления пациенту большего комфорта, поскольку медицинская процедура, например биопсия, может быть выполнена быстрее. Альтернативно, повышенная скорость может использоваться для увеличения разрешающей способности изображения в полученных изображениях, и, таким образом, обеспечивать лучшее качество изображения за то же самое время получения. В целом, изобретение предпочтительно стремится смягчить, облегчить или исключить один или больше из упомянутых выше недостатков отдельно или в любой комбинации. В частности, в качестве задачи настоящего изобретения может рассматриваться обеспечение системы и способа, которые решают упомянутые выше проблемы или другие проблемы предшествующего уровня техники.
В первом аспекте изобретение обеспечивает систему оптического зонда, соответствующую пункту 1 приложенной формулы изобретения.
Подавая электрический сигнал возбуждения на приводы таким образом, что частота сканирования изменяется в соответствии с амплитудой сигнала возбуждения, можно получить переменную частоту сканирования в поле обзора. Тем самым, возможно получить скорость сканирования, которая превышает скорость, которая может быть получена при постоянной скорости сканирования в поле обзора, причем без проблем со слишком большим выделением тепла элементами привода, например катушками привода.
В системах оптических зондов, соответствующих предшествующему уровню техники, чтобы иметь возможность работать на частотах вблизи резонансной частоты, целевая область сканируется, используя спирали, состоящие из круговых или эллиптических линий. Максимальный радиус, который может быть использован при сканировании, ограничен максимальным током, который может быть подан в катушки привода, не перегревая их, то есть предполагается, что нет никаких геометрических ограничений по максимально допустимому радиусу. Более высокие токи привода вызывают большее рассеивание тепла от приводов, например, катушек. Однако в случае, когда система ведет сканирование по кругу с радиусом, который меньше, чем максимальный радиус, используются токи, которые ниже максимально допустимого тока. Следовательно, в этом случае возможно сканировать ту же самую линию с частотой выше резонансной частоты, которая требует более высокого тока, чтобы получить той же самый радиус, но все еще не превышая максимально допустимый ток. Таким образом, в предпочтительных вариантах осуществления рассеивание тепла контролируется и, таким образом, частота сканирования может быть выбрана насколько возможно высокой, но не столь высокой, чтобы перегрузить приводы. При такой повышенной скорости сканирования при малом радиусе общая скорость сканирования может быть увеличена по сравнению с постоянной скоростью сканирования в системах предыдущего уровня техники.
Блок управления создает сигнал возбуждения, так что амплитуда сигнала возбуждения изменяется во время сканирования в поле обзора. В частности, это может быть получено, подавая на набор приводов сигналы возбуждения, содержащие ряд гармонических сигналов, таких как два гармонических сигнала, сдвинутых по фазе на 90°, и когда набор приводов содержит два привода, пространственно разнесенных относительно друг друга на 90 °.
Набор приводов может содержать один или несколько типов различных приводов, таких как приводы электромагнитного и/или пьезоэлектрического типа. Таким образом, набор приводов может содержать, по меньшей мере, один из следующих типов: электропроводящая катушка и пьезоэлектрический элемент.
Сканирование в поле обзора может выполняться, подавая сигналы возбуждения на набор приводов, вызывающих сканирование по спирали или сканирование по фигурам Лиссажу.
В предпочтительном варианте осуществления сигнал возбуждения ограничен в соответствии с заданной максимальной величиной, определяемой набором приводов, так что сигнал возбуждения ограничивается в соответствии с максимальным определенным током привода, обеспечивающим безопасную работу конкретных используемых приводов, определяемым, например, максимально допустимым током привода для катушек электромагнитного привода.
Сигнал возбуждения может ограничиваться в соответствии с критерием температуры набора приводов, тем самым может быть гарантирована безопасная работа катушек привода без чрезмерно высоких температур. Это особенно важно в рамках медицинских применений, где высокие температуры могут навредить пациенту, например, в случае, когда оптический зонд используется в качестве биопсийной иглы, выполненной с возможностью введения в ткани пациента. В вариантах осуществления, в которых набором приводов являются электропроводящие катушки, критерий температуры электропроводящих катушек может быть определен, измеряя электрическое сопротивление, по меньшей мере, одной из электропроводящих катушек. Это решение позволяет оставить свободным место, предназначенное для специального температурного датчика.
Оптический зонд может содержать измерительный преобразователь, выполненный с возможностью измерения положения оптического волокна, например, в форме преобразователя на основе катушки. Тем самым, возможно контролировать фактическое положение оптического волокна и, таким образом, получать обратную связь о фактическом положении сканирования. В частности, блок управления может содержать генератор заданного положения и блок управления положением, в котором блок управления положения оперативно соединяется с измерительным преобразователем. Тем самым, возможно точно управлять перемещением оптического волокна и, таким образом, траекторией сканирования.
В частности, оптическая направляющая является оптическим волокном со свободным дистальным концом, и свободный дистальный конец предпочтительно образует оптическую линзу. Оптическое волокно предпочтительно выполнено с возможностью направления, по меньшей мере, видимого света, такого как свет лазера, свет светодиода или другого источника света. В частности, оптический зонд может быть выполнен с возможностью конфокального сканирования.
Система оптического зонда пригодна для медицинских применений и, таким образом, в предпочтительных вариантах осуществления оптический зонд образует часть, такую как эндоскоп, катетер, игла или систему взятия биопсии. При медицинских применениях преимуществами системы зонда являются повышенный комфорт для пациента благодаря повышенной скорости сканирования, которая может использоваться для уменьшения времени, необходимого для потенциально некомфортного медицинского исследования, или альтернативно увеличить точность сканирования, чтобы гарантировать, что в человеческой ткани исследуется соответствующее место, например опухоль, избегая, таким образом, повторного обследования.
Блок управления может быть осуществлен, используя процессор на основе электронной схемы, который управляется алгоритмом, служащим также для создания сигналов возбуждения. Блок управления может быть осуществлен как чисто цифровая схема, аналоговая схема или смешанные цифровые и аналоговые схемы, такие как те, которые известны специалисту в данной области техники.
Во втором аспекте изобретения обеспечивается оптическая система получения изображения, содержащая:
- систему оптического зонда, соответствующую первому варианту.
Как сказано выше, такая оптическая система получения изображения пригодна для медицинских применений. Например, когда оптический зонд формируется как часть биопсийной иглы, где изображение ткани, полученное с помощью оптического зонда, используется для оказания помощи при взятии биопсии, чтобы гарантировать, что биопсия берется из требуемой области.
В третьем аспекте изобретения обеспечивается способ управления оптическим зондом, соответствующий пункту 12 приложенной формулы изобретения.
Следует понимать, что те же самые преимущества и варианты осуществления, что и в первом варианте, применимы также для второго и третьего вариантов. В целом, различные варианты изобретения могут объединяться и соединяться любым способом, возможным в рамках объема изобретения. Эти и другие варианты, признаки и/или преимущества изобретения станут очевидны и будут подробно объяснены со ссылкой на варианты осуществления, описанные далее.
Как было упомянуто, изобретение пригодно для медицинских устройств и особенно изобретение пригодно в рамках области диагностики рака, контроля заживления ран или изучения молекулярных процессов в ткани. Однако следует понимать, что система зонда пригодна также в рамках других областей применения, такой как контроль качества поверхностей материалов.
Краткое описание чертежей
Варианты осуществления изобретения будут описаны только для примера со ссылкой на чертежи, на которых:
Фиг.1 - набросок системы оптического датчика с миниатюрным оптическим датчиком, пригодной для медицинских применений, и схемы управления, подключенной для управления катушками привода для управления перемещением оптической направляющей в оптическом зонде, чтобы управлять траекторией сканирования;
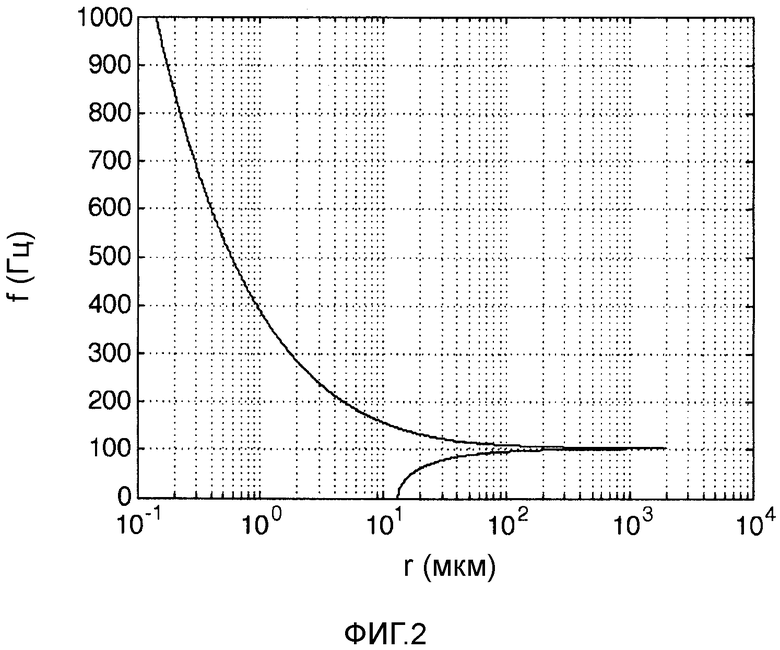
Фиг.2 - график, показывающий соотношение между радиусом сканирования и частотой сканирования для конкретного варианта осуществления системы оптического зонда, необходимое для достижения максимального тока через катушки привода, где видно, что частота сканирования значительно изменяется в соответствии с радиусом сканирования;
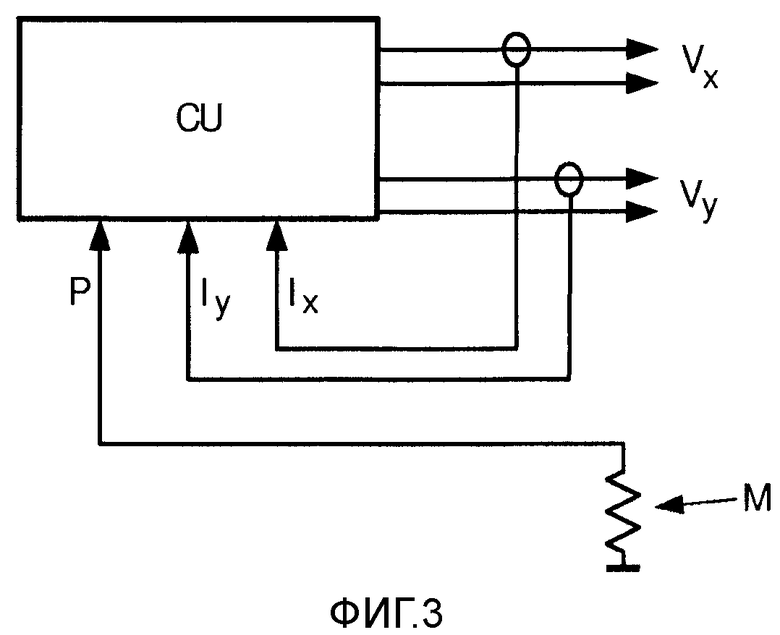
Фиг.3 - схема варианта осуществления блока управления, формирующего набор из двух электрических сигналов возбуждения в соответствующих двух приводах и, в качестве обратной связи, блок управления соединен с измерительной катушкой, служащей для контроля положения оптической направляющей;
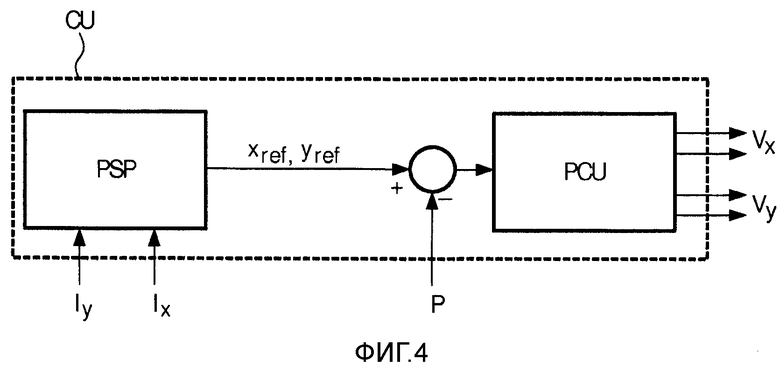
Фиг.4 - подробности примера реализации блока управления, показанного на фиг.3, с генератором заданного положения и блоком управления положением;
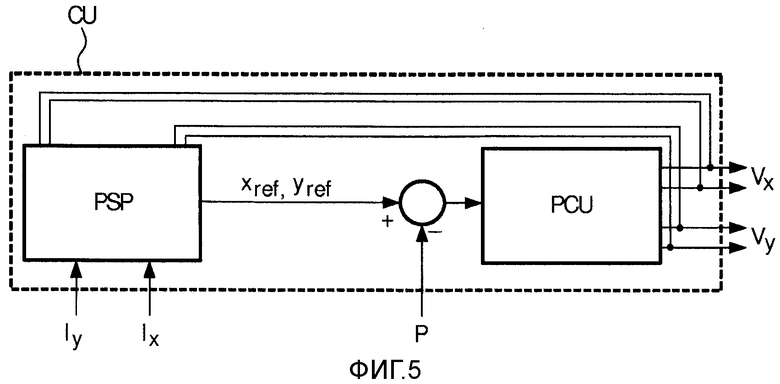
Фиг.5 - альтернативная реализация блока управления, показанного на фиг.3, а именно в которой генератор заданного положения принимает в качестве обратной связи результат измерения температуры катушек привода, измеряя связанные ток и напряжение, прикладываемое к катушкам привода;
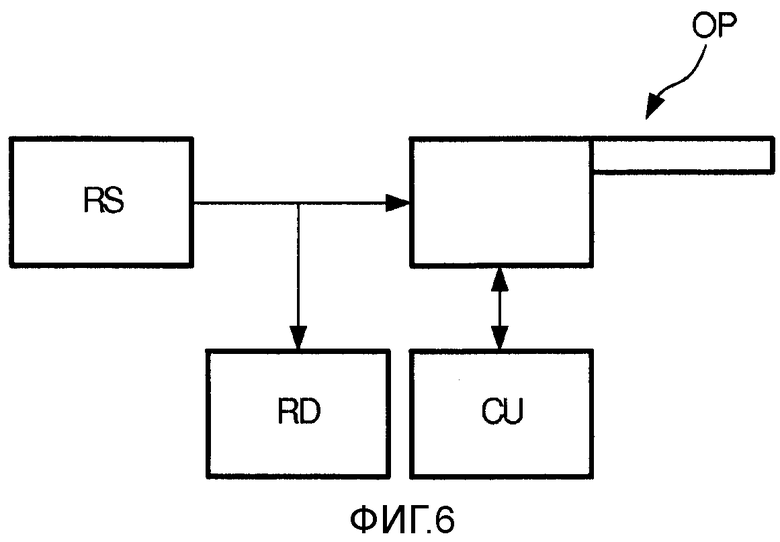
Фиг.6 - вариант осуществления оптической системы получения изображения.
Описание вариантов осуществления
На фиг.1 представлен чертеж наконечника миниатюрного оптического зонда с оптической направляющей G, оптическим волокном, расположенным центрально внутри корпуса H (только намечен линией, чтобы обеспечить видимость внутренних частей зонда). Тем самым световые сигналы могут направляться через оптическую направляющую G к наконечнику зонда. Оптическая направляющая G крепится относительно корпуса на одном конце, тогда как дистальный конец оптической направляющей, то есть конец, направленный к наконечнику зонда, свободно перемещается. В направлении свободного дистального конца оптическая направляющая G приводится в действие приводной системой А. В показанном варианте осуществления два катушечных привода в форме электромагнитных катушек, пространственно расположенных под углом 90° друг к другу, выполнены с возможностью осуществления перемещения оптической направляющей G в двух перпендикулярных направлениях, прикладывая соответствующий сигнал Vx, Vy возбуждения, подаваемый на две катушки от блока CU управления. Когда световое или ультразвуковое излучение подается на конец, противоположный свободному концу оптической направляющей G, блок CU управления может управлять перемещением свободного конца оптической направляющей G, чтобы сканировать в поле обзора. В соответствии с изобретением, блок CU управления формирует сигналы Vx, Vy возбуждения, так что обеспечивается частота сканирования, изменяющаяся в соответствии с амплитудой сигнала Vx, Vy возбуждения. Тем самым возможно сканировать поле обзора так, что частота сканирования изменяется в зависимости от радиуса сканирования. Таким образом, сканирование меньшего радиуса может быть выполнено с более высокой частотой сканирования, чем большего радиуса. Тем самым средняя скорость сканирования системы сканирования может быть увеличена по сравнению с системами, использующими постоянную частоту сканирования, при этом не вызывая проблемы с перегревом катушек привода.
В предпочтительных вариантах осуществления блок управления содержит контур управления с обратной связью, который обеспечивает ток привода с частотой сканирования через катушки, который поддерживается, по существу, равным максимально допустимому току через катушки. Тем самым может быть достигнута максимальная скорость сканирования в поле обзора. Предпочтительно может использоваться спиральная форма сканирования. Измерительная катушка М, присоединенная к оптической направляющей G, установлена для осуществления обратной связи по фактическому положению оптической направляющей G во время сканирования.
На фиг.2 представлен график для конкретной конструкции оптического зонда, показывающий пример соотношения между радиусом r сканирования и частотой f сканирования, чтобы обеспечить максимально допустимый ток катушек привода. Как видно на графике, сигналы возбуждения, подаваемые на приводы, формируются таким образом, что частота f сканирования значительно изменяется в зависимости от фактического радиуса r сканирования, а именно так, что меньшие радиусы сканируются на более высоких частотах, чем большие радиусы при том же самом максимально допустимом токе. Таким образом, при сканировании по кругу при максимально допустимом токе привода, но с переменной частотой, радиус, который может быть достигнут, будет являться функцией частоты. Или, наоборот, для заданного радиуса существует максимальная частота, с которой может производиться сканирование по кругу с этим радиусом, используя максимально допустимый ток возбуждения. Кривая, показанная на фиг.2, основана на анализе конкретной системы оптического зонда, и кривая показывает оценочные связанные между собой максимальный радиус и максимальную частоту. Область, ограниченная кривой и линиями f=0 и радиус=0, представляет набор всех возможных частот и радиусов, которые могут использоваться без перегрева данного привода. На практике следует учитывать, что для радиуса существует дополнительное геометрическое ограничение: радиус всегда должен быть меньше, чем максимальный r (в конкретной системе r_max=100 мкм). Кроме того, для частоты сканирования существует отдельный верхний предел, так как частота сканирования ограничивается не только рассеиванием в катушках привода, но также и параметрами контура управления с обратной связью (в конкретной системе это ограничение по обратной связи составляет 300 Гц).
В конкретном варианте осуществления оптического зонда может отображаться круговое поле обзора с максимальным диаметром 200 мкм. Дополнительно, максимальная амплитуда переменного тока через катушки привода при комнатной температуре составляет 0,42 A. Самая низкая резонансная частота системы составляет 103 Гц. При сканировании по кругу с диаметром 200 мкм на резонансной частоте 103 Гц необходима амплитуда переменного тока 0,0204 А. Та же самая линия может сканироваться с максимальным током (амплитуда 0,42 A) на более высокой частоте 109,5 Гц. При сканировании по кругу с диаметром всего 20 мкм на резонансной частоте необходима амплитуда тока всего 0,002 A, в то время как то же самое сканирование по кругу может быть выполнено, используя максимальную амплитуду тока 0,42A при гораздо более высокой частоте 156,7 Гц.
Чтобы оценить, насколько возможно увеличить скорость сканирования таким образом, будут приведены два примера, основанные на упомянутом выше оптическом зонде, то есть системе с максимальной частотой сканирования 300 Гц. При сканировании кругового поля сканирование может выполняться по спиралям с шагом 0,5 мкм между ними. Сканирование области диаметром 150 мкм производится только на резонансной частоте, затем изображение получается за время 1,46 секунды. Однако принимая переменную частоту сканирования такой, что во время сканирования всего поля обзора всегда поддерживается максимально возможный ток, равный 0,42 A, то же самое изображение (диаметром 150 мкм) может быть получено во время всего 1,17 секунды. Затем, если сканируется меньшая область с диаметром всего 50 мкм, то при сканировании только на резонансной частоте изображение может быть получено через 0,49 секунды (2 кадра в секунду). Однако когда сканирование выполняется, адаптируя переменную частоту сканирования, то тогда изображение может быть получено через 0,32 секунды (3 кадра в секунду).
Следует подчеркнуть, что максимальный ток, который может проходить через катушки привода, определяется температурой катушки. Поэтому, чтобы осуществлять привод сканера при максимальном токе, предпочтительно измерять температуру катушек привода вместо измерения тока привода. Температура катушки связана с ее электрическим сопротивлением, как R=R0(1-α(T-T0)), где R является сопротивлением катушки при температуре T, R0 представляет сопротивление катушки при температуре T, и α представляет температурный коэффициент сопротивления катушки. Электрическое сопротивление катушки может быть получено, измеряя напряжение и ток, проходящий через катушку. Альтернативно, может использоваться температурный датчик, чтобы измерять температуру катушки, однако внутри медицинского миниатюрного оборудования предпочтительно оставить место для такого температурного датчика свободным и вместо него использовать упомянутый электрический способ вычитания температур.
На фиг.3 представлена простая схема блока CU управления. Блок CU управления формирует набор из двух напряжений Vx, Vy привода для набора соответствующих приводов, например двух катушек привода. Результирующие токи Ix, Iy привода определяются и подаются обратно на блок управления, который может затем соответственно регулировать напряжения Vx, Vy привода, например, в случае, если для одного из приводов достигается заданный предел тока. Дополнительно, измерительный преобразователь в форме измерительной катушки, прикрепленной к оптической направляющей, чтобы контролировать ее положение и, таким образом, подает обратно сигнал P положения на блок CU управления. Тем самым блок CU управления может учитывать фактическое положение оптической направляющей при формировании напряжений Vx, Vy привода.
На фиг.4 представлена возможная реализация блока управления, показанного на фиг.3. Генератор PSP заданного положения создает напор опорных положений или предпочтительных положений x и y, xref, yref. В предпочтительном варианте осуществления этот набор имеет вид:
xref = kωt sin(ωt), и
yref = kωt sin(ωt+π/2), и
где частота сканирования обозначается ω, время обозначается t и k является заданным параметром. Это предпочтительное положение затем вычитается из фактических положений Px и y, основываясь на входном результате измерения катушки. Результат этого вычитания подается на блок PCU управления положением, который затем формирует сигналы Vx, Vy возбуждения, соответственно. Генератор PSP заданного положения может определять частоту сканирования ω, основываясь на обратной связи в форме токов Ix, Iy привода через приводы, например, обеспечивая максимально возможную частоту сканирования ω, учитывая простое ограничение максимального тока, как было упомянуто.
На фиг.5 представлен альтернативный вариант осуществления блока управления, подобного показанному на фиг.4, за исключением того, что генератор PSP заданного положения принимает сигналы Vx, Vy возбуждения и, таким образом, генератору PSP заданного положения разрешается формировать предпочтительный набор положений xref, yref, учитывая фактическую температуру катушек привода, полученную путем ее вывода, исходя из напряжений Vx, Vy привода и токов Ix, Iy привода. Тем самым, например, возможно постоянно оптимизировать частоту сканирования ω до предопределенной максимальной температуры катушки, которая, как считают, обеспечивает безопасную работу. Таким образом, используется потенциал системы по обеспечению максимальной скорости сканирования.
На фиг.6 представлена схема оптической системы получения изображения, содержащая систему оптического зонда, как описано ранее. Источник RS излучения, например источник сигнала на основе лазера или светодиода, оптически соединяется с оптическим зондом OP, например, миниатюрным оптическим зондом для медицинского исследования и/или для взятия биопсии. Зонд OP выполнен с возможностью направления излучения, испускаемого источником RS излучения в интересующую область. Детектор RD излучения оптически соединяется с оптическим зондом OP и этот детектор RD выполнен с возможностью обнаружения излучения, принимаемого от интересующей области. Из принятого излучения, обнаруженного детектором RD, возможно создать изображение интересующей области. В случае системы взятия биопсии зонд OP может являться частью биопсийной иглы и, таким образом, возможно получить изображение фактического места осуществления взятия биопсии. Это в высшей степени предпочтительно, чтобы гарантировать, что биопсия берется из требуемого места в ткани. С помощью системы оптического зонда, соответствующего изобретению, сканирование и, таким образом, получение изображения могут выполняться с высокой скоростью, уменьшая, таким образом, время, требующееся для медицинской процедуры.
Чтобы подвести итог, изобретение обеспечивает систему оптического зонда, имеющую зонд с оптической направляющей G на дистальном конце. Оптическая направляющая G устанавливается внутри корпуса H, так чтобы дистальный конец мог перемещаться относительно корпуса Х. Набор приводов A, например электромагнитных катушек привода, может перемещать дистальный конец при подаче сигнала Vx, Vy возбуждения. Блок CU управления формирует сигнал Vx, Vy возбуждения, чтобы обеспечивать частоту сканирования, изменяющуюся в соответствии с амплитудой сигнала Vx, Vy возбуждения. При такой системе зонда возможно сканировать поле обзора с частотой сканирования, изменяющейся в зависимости от радиуса сканирования. Учитывая максимально допустимый ток привода, возможно увеличить скорость сканирования по сравнению со сканированием на частоте механического резонанса оптической системы, поскольку малые радиусы можно сканировать на высокой частоте сканирования. Система зонда пригодна для миниатюрных медицинских устройств, например, в качестве части биопсийной иглы, где зонд может использоваться для обеспечения изображений места лечения, помогая медицинскому персоналу брать биопсию в требуемом месте, например, чтобы гарантировать, что проба биопсии взята из опухоли, а не из окружающей ткани. В варианте осуществления приводы являются электромагнитными катушками и блок CU управления формирует сигналы Vx, Vy возбуждения, учитывая температуру катушек привода, так что максимальная скорость сканирования может быть получена, все же не перегревая катушки привода. В частности, температура катушки может быть определена, основываясь на результате измерения электрического сопротивления катушки, то есть основываясь на токе и напряжении сигнала возбуждения. Дополнительно, измерительная катушка М может крепиться к оптической направляющей G, чтобы обеспечивать позиционную обратную связь, давая возможность блоку CU управления формировать сигнал Vx, Vy возбуждения для точного получения желаемой траектории сканирования.
Хотя изобретение было представлено и описано подробно на чертежах и в предшествующем описании, такие представление и описание должны считаться иллюстративными или примерами и не являющимися ограничениями; изобретение не ограничивается раскрытыми вариантами осуществления. Специалистами в данной области техники могут быть поняты и осуществлены и другие изменения в раскрытых вариантах осуществления, исходя из изучения чертежей, описания и приложенной формулы изобретения. В формуле изобретения слово "содержащий" не исключает другие элементы или этапы, и единственное число не исключает множественное число. Единый процессор или другой блок могут выполнить функции нескольких позиций, представленных в формуле изобретения. Простой факт, что некоторые характеристики повторяются во взаимно различных зависимых пунктах формулы изобретения, не указывает, что комбинация этих характеристик не может использоваться для достижения преимуществ. Компьютерная программа может храниться/распространяться на соответствующем носителе, таком как оптический носитель данных или твердотельный носитель, предоставляемый вместе или как часть другого аппаратурного обеспечения, но может также распространяться в других формах, таких как через Интернет или другие проводные или беспроводные системы связи. Любые ссылки в пунктах формулы изобретения не должны истолковываться как ограничение объема изобретения.
Система оптического зонда имеет зонд с оптической направляющей (G) с дистальным концом. Оптическая направляющая (G) устанавливается в корпусе (H), так чтобы дистальный конец мог перемещаться относительно корпуса (H). Набор (А) приводов, например электромагнитных катушек привода, может перемещать дистальный конец путем подачи сигнала (Vx, Vy) возбуждения. Блок (CU) управления формирует сигнал (Vx, Vy) возбуждения, чтобы обеспечить частоту сканирования, изменяющуюся в соответствии с амплитудой сигнала (Vx, Vy) возбуждения, и так чтобы амплитуда сигнала (Vx, Vy) возбуждения изменялась во время сканирования в поле обзора. Сигнал возбуждения, подаваемый на набор приводов, формируется так, что частота сканирования изменяется таким образом, что меньшие радиусы сканируются на более высокой частоте, чем большие радиусы, и частота сканирования при меньших радиусах больше, чем резонансная частота оптической направляющей (G). При такой системе зонда возможно сканировать поле обзора с частотой сканирования, изменяющейся в зависимости от радиуса сканирования. Технический результат - увеличение скорости сканирования. 3 н. и 9 з.п. ф-лы, 6 ил.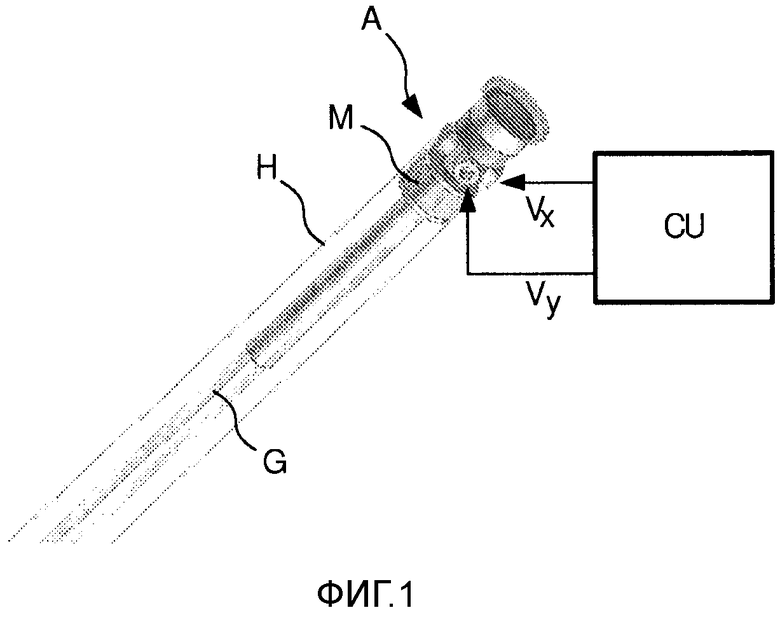
1. Система оптического зонда, содержащая
- зонд, содержащий
- оптическую направляющую (G), имеющую дистальный конец,
- корпус (Н), причем оптическая направляющая (G) установлена внутри корпуса, так чтобы обеспечить перемещение дистального конца относительно корпуса (Н), и
- приводную систему (А), содержащую набор приводов, выполненных с возможностью перемещать дистальный конец посредством силы перемещения, вызванной подачей сигналов (Vx, Vy) возбуждения на набор приводов, и
- блок (CU) управления, оперативно соединенный с зондом, причем блок(CU) управления выполнен с возможностью формирования сигнала (Vx, Vy) возбуждения для набора приводов, так чтобы перемещать дистальный конец в соответствии с формой сканирования в поле обзора, причем блок (CU) управления выполнен с возможностью формирования сигнала (Vx, Vy) возбуждения, так чтобы обеспечивать частоту сканирования, изменяющуюся в соответствии с амплитудой сигнала (Vx, Vy) возбуждения, и так чтобы амплитуда сигнала (Vx, Vy) возбуждения изменялась во время сканирования в поле обзора, причем сигнал возбуждения, подаваемый на набор приводов, формируется так, что частота сканирования изменяется таким образом, что меньшие радиусы сканируются на более высокой частоте, чем большие радиусы, и частота сканирования при меньших радиусах больше, чем резонансная частота оптической направляющей (G).
2. Система оптического зонда по п.1, в которой сигнал (Vx, Vy) возбуждения для набора приводов содержит ряд гармонических сигналов.
3. Система оптического зонда по п.1, в которой набор приводов содержит, по меньшей мере, одно из электропроводящей катушки и пьезоэлектрического элемента.
4. Система оптического зонда по п.1, в которой формой сканирования в поле обзора является одна из спиральной формы и фигуры Лиссажу.
5. Система оптического зонда по п.1, в которой сигнал (Vx, Vy) возбуждения ограничен в соответствии с заданной максимальной величиной, определенной набором приводов.
6. Система оптического зонда по п.1, в которой сигнал (Vx, Vy) возбуждения ограничен в соответствии с критерием температуры набора приводов.
7. Система оптического зонда по п.6, в которой набор приводов является электропроводящими катушками и в которой критерий температуры электропроводящих катушек выводится из результата измерения электрического сопротивления, по меньшей мере, одной из электропроводящих катушек.
8. Система оптического зонда по п.1, в которой оптическая направляющая (G) является оптическим волокном со свободным дистальным концом.
9. Система оптического зонда по п.1, выполненная с возможностью конфокального сканирования.
10. Система оптического зонда по п.1, в которой оптический зонд является частью одного из эндоскопа, катетера, иглы или системы взятия биопсии.
11. Оптическая система получения изображения, содержащая:
систему оптического зонда по п.1,
источник (RS) излучения, оптически соединенный с оптическим зондом (OP), причем зонд (OP) выполнен с возможностью направления излучения, испускаемого источником (RS) излучения, в интересующую область, и
детектор (RD) излучения, оптически соединенный с оптическим зондом (OP), причем детектор (RD) выполнен с возможностью обнаружения излучения, принятого из интересующей области.
12. Способ управления оптическим зондом, содержащим оптическую направляющую, имеющую дистальный конец, корпус, причем оптическая направляющая установлена внутри корпуса, так чтобы дистальный конец перемещался относительно корпуса, и электромагнитную приводную систему, содержащую набор приводов, выполненных с возможностью перемещения дистального конца посредством силы перемещения, вызванной подачей сигнала возбуждения на набор приводов, причем способ содержит этап, на котором подают сигнал возбуждения на набор приводов, чтобы перемещать дистальный конец в соответствии с формой сканирования в поле обзора, в котором сигнал возбуждения обеспечивает частоту сканирования, изменяющуюся в соответствии с амплитудой сигнала возбуждения, и в котором амплитуда сигнала возбуждения изменяется во время сканирования в поле обзора, причем сигнал возбуждения, подаваемый на набор приводов, формируется так, что частота сканирования изменяется таким образом, что меньшие радиусы сканируются на более высокой частоте, чем большие радиусы, и частота сканирования при меньших радиусах больше, чем резонансная частота оптической направляющей.
| Устройство для смешивания и выгрузки сухих и увлажненных кормов | 1980 |
|
SU954097A1 |
| US 6580677 B1, 17.06.2003 | |||
| JP 2003344034 A, 03.12.2003 | |||

