ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к устройству управления перемещением катетера через объект и локализации катетера в объекте, при этом упомянутый катетер содержит магнитный элемент на своем кончике или рядом с ним. Кроме того, настоящее изобретение относится к способу управления устройством по настоящему изобретению с целью управления перемещением катетера через объект и локализации катетера в объекте. Кроме того, настоящее изобретение относится к компьютерной программе для реализации упомянутого способа на компьютере и для управления таким устройством.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Визуализация с использованием магнитных частиц (Magnetic Particle Imaging, MPI) - новая технология медицинской визуализации. Первые варианты реализации MPI были двумерными, а именно создавали двумерные изображения. Будущие варианты исполнения MPI будут трехмерными (3D). Зависящее от времени, или 4D, изображение объекта, не являющегося статичным, может создаваться путем объединения временной последовательности 3D-изображений в киноленту, при условии, что объект не претерпевает существенных изменений в процессе сбора данных для одного 3D-изображения.
MPI - реконструктивный способ визуализации, как и компьютерная томография (CT) или магнитно-резонансная визуализация (MRI). Соответственно MP-изображение представляющего интерес объема объекта генерируется в два этапа. Первый этап, называемый сбором данных, выполняется с использованием MPI-сканера. MPI-сканер имеет средство генерирования статического магнитного градиентного поля, называемого «полем выбора» (selection field), которое имеет единственную точку нулевого поля (field free point, FFP) в изоцентре сканера. Кроме того, сканер имеет средство генерирования зависящего от времени магнитного поля, близкого к пространственно-однородному. По существу это поле получают наложением быстро изменяющегося поля, обладающего малой амплитудой, называемого «полем возбуждения» (drive field), и медленно изменяющегося поля, обладающего большой амплитудой, называемого «полем фокусировки» (focus field). Путем добавления обладающих временной зависимостью «поля возбуждения» и «поля фокусировки» к статическому «полю выбора» FFP-точку можно перемещать вдоль заданной FFP-траектории по сканируемому объему, окружающему изоцентр. Сканер также имеет систему из одной или более, например трех, приемных катушек и способен регистрировать любое напряжение, индуцируемое в этих катушках. С целью сбора данных объект, подлежащий визуализации, помещают в сканер так, чтобы представляющий интерес объем объекта находился в поле обзора сканера, являющегося подпространством объема сканирования.
Объект должен содержать магнитные наночастицы; если объект представляет собой животное или человека, до проведения сканирования животному или человеку вводится контрастное вещество, содержащее такие частицы. В процессе сбора данных MPI-сканер управляет прохождением FFP-точки вдоль тщательно подобранной траектории, вычерчивающей объем сканирования или, по меньшей мере, поле обзора. Магнитные наночастицы в объекте испытывают воздействие изменяющегося магнитного поля и реагируют путем изменения своей намагниченности. Изменение намагниченности наночастиц порождает зависящее от времени электрическое напряжение в каждой из приемных катушек. Это напряжение подвергается выборке в приемнике, связанном с приемной катушкой. Выдаваемые приемниками выборки регистрируются и образуют собранные данные. Параметры, контролирующие детали сбора данных, составляют протокол сканирования.
На втором этапе генерирования изображения, называемом реконструкцией изображения, изображение рассчитывается, или реконструируется, из данных, собранных на первом этапе. Изображение представляет собой дискретный 3D-массив данных, представляющий полученную по результатам выборки аппроксимацию позиционно-зависимой концентрации магнитных наночастиц в поле обзора. Реконструкция обычно осуществляется компьютером, выполняющим соответствующую компьютерную программу. Компьютер и компьютерная программа реализуют алгоритм реконструкции. Алгоритм реконструкции основан на математической модели сбора данных. Как и во всех способах визуализации, построенных на реконструкции, данная модель представляет собой интегральный оператор, оказывающий действие на собранные данные; алгоритм реконструкции пытается «отменить», насколько это возможно, действие модели.
Такие MPI-устройство и способ имеют преимущество в том, что могут использоваться для обследования произвольных объектов исследования, - например организма человека, - неразрушающим образом и не вызывая каких-либо повреждений, с высоким пространственным разрешением, как близко к поверхности исследуемого объекта, так и на удалении от нее. Подобная схема и способ, в общем, известны и были впервые описаны в документе DE 10151778 A1 и в работе Gleich, B. and Weizenecker, J. (2005), "Tomographic imaging using the nonlinear response of magnetic particles" in nature, том 435, стр. 1214-1217. Схема и способ для проведения визуализации с использованием магнитных частиц (MPI), описанные в этой публикации, используют преимущества нелинейной кривой намагничивания малых магнитных частиц.
Для перемещения катетера в организме пациента существует множество роботизированных катетерных систем. Роботизированное управление катетером имеет два преимущества. При работе менее подготовленных хирургов такие системы могут значительно повысить скорость и точность выполнения катетерной процедуры. В случае проведения длительных процедур, подобных электрофизиологическим процедурам (EP), они снижают дозу рентгеновского облучения, получаемую пациентом. Системы осуществляют либо механическое управление, либо с помощью магнитных полей, как в стереотаксической системе, в которой однородные магнитные поля изгибают катетер.
Такая система известна, например, из документа US 2003/0125752 A1. Перемещение катетера через среду, которая может представлять собой живую ткань, такую как головной мозг человека, контролируется в этой системе путем механического проталкивания через среду гибкого катетера, имеющего магнитный кончик, и наложения магнитного поля, величина и направление которого направляют механически проталкиваемый кончик катетера пошагово вдоль требуемой траектории. Магнитное поле контролируется в магнитной стереотаксической системе процессором с использованием обратной связи (пропорциональной, интегральной и по производной). Магнитные поля прикладываются с помощью сверхпроводящих катушек, при этом токи, пропускаемые через катушки, подбираются так, чтобы минимизировать «метрику тока».
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задача настоящего изобретения заключается в создании усовершенствованного устройства и способа управления перемещением катетера через объект, которые также способны локализовать катетер в объекте.
В первом аспекте настоящего изобретения представлено устройство, содержащее:
- средство выбора, содержащее блок генерирования сигналов поля выбора, а также элементы возбуждения поля выбора, в частности магниты или катушки возбуждения поля выбора, предназначенные для генерирования магнитного поля выбора, имеющего пространственную диаграмму напряженности магнитного поля, при которой в поле обзора образуются первая подзона, имеющая низкую напряженность магнитного поля, а также вторая подзона, имеющая более высокую напряженность магнитного поля,
- средство возбуждения, содержащее блок генерирования сигналов поля возбуждения, а также катушки возбуждения поля возбуждения для изменения пространственного положения этих двух подзон в поле обзора посредством магнитного поля возбуждения, так что намагниченность магнитного материала локально изменяется,
- приемное средство, содержащее, по меньшей мере, один блок приема сигналов, а также, по меньшей мере, одну приемную катушку для сбора сигналов детектирования, при этом сигналы детектирования зависят от намагниченности в поле обзора, сама же намагниченность подвержена влиянию изменения пространственного положения первой и второй подзон,
- средство управления, предназначенное для управления упомянутыми блоками генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для генерирования соответствующих магнитных полей для перемещения катетера через объект в направлении, заданном командами на перемещение, а также для локализации катетера в объекте, а также
- средство обработки для обработки упомянутых сигналов детектирования, собранных при приложении соответствующих магнитных полей для локализации катетера в объекте, а также для определения положения магнитного элемента катетера в объекте из обработанных сигналов детектирования.
В следующем аспекте настоящего изобретения представлен соответствующий способ управления таким устройством.
В следующем аспекте настоящего изобретения представлена компьютерная программа, содержащая средство программного кода, предписывающее компьютеру осуществлять управление устройством по настоящему изобретению для выполнения этапов способа по настоящему изобретению, когда упомянутая компьютерная программа реализуется на компьютере.
Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения. Следует понимать, что заявленный способ и заявленная компьютерная программа имеют аналогичные и/или идентичные предпочтительные варианты осуществления, как и заявленное устройство, определенные в зависимых пунктах формулы изобретения.
Авторы изобретения определили, что главный ограничительный фактор известных магнитных стереотаксических систем заключается в низкой напряженности магнитных полей (например, 100 мТл), поскольку предполагается, что контактные усилия, прикладываемые к сердечной мышце, существенно ниже оптимальных. Одна из основных областей применения таких стереотаксических систем и изобретения - электрофизиологические измерения и абляционные воздействия на сердце. В этих сферах применения катетер (в том числе электрод) должен поджиматься к мышце сердца, в частности, для абляций. Чем выше напряженность магнитного поля, тем выше вращательный момент, а значит сила, которая может быть приложена. Далее было определено, что вторым недостатком стереотаксической системы является низкая скорость изменения магнитного поля.
Таким образом, первая идея настоящего изобретения заключается в использовании частей известных MPI-устройства и способа генерирования требуемых магнитных полей с целью управления катетером, а значит для замещения магнитной стереотаксической системы MPI-системой, адаптированной соответствующим образом. В частности, некоторые катушки возбуждения известных MPI-устройств используются для генерирования соответствующих магнитных полей, при этом управляющий блок MPI-устройства выполнен с возможностью управления соответствующими блоками генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для генерирования соответствующих магнитных полей, с помощью которых катетер перемещается через объект. В управляющем блоке также предусмотрены команды на перемещение, указывающие направление перемещения катетера, на основе которых управляющий блок генерирует управляющие команды для блоков генерирования сигналов.
Если говорить об MPI-аппаратном обеспечении, в частности, о различных катушках возбуждения, которые обычно (но не всецело) заключают в себе объект (пациента), магнитные поля, генерируемые катушками MPI-системы, могут быть существенно более мощными (например, 400 мТл) по сравнению с магнитными полями, создаваемыми современными стереотаксическими системами (например, 100 мТл). Следовательно, катетер может перемещаться значительно быстрее, с меньшими ошибками перемещения и более высокой точностью. Кроме того, MPI-система имеет значительно более высокое быстродействие, в частности магнитные поля могут изменяться значительно быстрее, чем в стереотаксической системе, например на два порядка. Помимо этого, могут прикладываться более высокие крутящие моменты, так что могут достигаться более высокие скорости по преодолению трения. Более высокая скорость изменения магнитного поля может быть реализована, в частности, потому, что генератор поля может располагаться ближе к пациенту (т.к., например, не требуется такого пространства, как для объемной рентгеновской системы), а также потому, что в MPI-системе требуются источники больших токов для обеспечения необходимых токов при MPI-сборе данных (например, для локализации и визуализации), которые, таким образом, в любом случае доступны в системе и которые, таким образом, могут предпочтительно эксплуатироваться для обеспечения требуемого перемещения катетера.
Кроме того, использование принципов работы и аппаратного обеспечения MPI-системы позволяет дополнительно локализовать катетер в объекте. Перемещение и локализация катетера, таким образом, могут быть выполнены с использованием устройства по настоящему изобретению поочередно и практически одновременно, не применяя дополнительное оборудование, такое как дополнительное аппаратное обеспечение для локализации, например, камеру или рентгеновскую систему для детектирования традиционных маркеров, нанесенных на катетер. Для локализации применяются известные MPI-принципы визуализации магнитных частиц в объекте, например, такие как описаны в вышеупомянутых документах, а именно управляющий блок в этом случае генерирует управляющие команды для блоков генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для генерирования соответствующих магнитных полей с целью визуализации катетера, в частности, магнитного элемента, расположенного на его кончике или возле него. Для этой цели магнитный элемент выполнен из магнитного материала или содержит соответствующий магнитный материал, например ферромагнитный материал, такой как Resovist. Приложенное поле выбора в этом случае имеет такую пространственную диаграмму напряженности магнитного поля, что имеют место первая подзона, т.е. так называемая «точка нулевого поля» (FEP), имеющая малую напряженность магнитного поля, где намагниченность магнитных частиц не достигает насыщения, и вторая подзона, имеющая более высокую напряженность магнитного поля, где намагниченность магнитных частиц достигает насыщения, при этом точка нулевого поля далее перемещается вдоль заданной траектории путем приложения соответствующих магнитных полей возбуждения и/или (необязательных) магнитных полей фокусировки (если таковые имеются).
Это позволяет использовать устройство и способ по настоящему изобретению для того, чтобы легко проверить правильность перемещения и местоположения катетера в процессе проведения интервенционной процедуры, не применяя иных технологий визуализации, таких как рентгеноскопия или CT, что снижает дозу облучения пациента. Кроме того, для решения этих задач не требуется дополнительное аппаратное обеспечение, которое необходимо при использовании известных стереотаксических систем.
Согласно предпочтительному варианту осуществления упомянутое средство управления выполнено с возможностью управления упомянутыми блоками генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для поочередного генерирования соответствующих магнитных полей для перемещения катетера через объект в направлении, заданном командами на перемещение, а также для локализации катетера в объекте. Таким образом, в процессе перемещения катетера действительное местоположение катетера можно определять и контролировать через требуемые промежутки времени. Таким образом, при отклонении местоположения от требуемого можно немедленно выполнить коррекцию либо в автоматическом режиме с помощью устройства, либо вручную пользователем.
Согласно другому варианту осуществления средство управления выполнено с возможностью преобразования подаваемых вручную или заданных команд на перемещение в управляющие сигналы для управления упомянутыми блоками генерирования сигналов. Предпочтительно для ввода таких команд на перемещение в управляющий блок создан интерфейс. Такой интерфейс может представлять собой пользовательский интерфейс, такой как клавиатура, указатель, компьютерная мышь или джойстик, либо интерфейс связи с другим устройством, таким как навигационный блок или навигационный инструмент на компьютере, на котором, например, запланировано перемещение катетера, например, с использованием данных изображения пациента, полученных с помощью другой визуализирующей технологи, такой как MR или CT. На управляющий блок при этом подаются команды на перемещение, которые он «переводит» в управляющие сигналы для соответствующих блоков генерирования сигналов, так чтобы генерировались соответствующие магнитные поля.
В то время как катетер, в общем, может перемещаться в объекте исключительно силами, прикладываемыми магнитными полями, в одном варианте осуществления в дополнение к перемещению с помощью магнитных полей предпочтительно обеспечить перемещение катетера в прямом и обратном направлении с использованием средства перемещения катетера. Это поддерживает перемещение катетера при входе в объект и выходе из него либо исключительно создает усилия для прямого и обратного перемещения, так что магнитные поля главным образом или всего лишь должны контролировать направление перемещения в объекте.
Такие средства перемещения катетера для проталкивания гибкого катетера через среду, в общем, известны и также используются в описанных стереотаксических системах. Подобное средство перемещения катетера, например, описано в US 2003/0125752 A1. Однако, в общем, здесь может быть использовано средство перемещения катетера любого вида, при этом изобретение не ограничивается вариантом осуществления, представленным в настоящем документе.
Средство управления предпочтительно выполнено с возможностью управления упомянутым средством перемещения катетера. Это позволяет осуществлять контролируемые координацию перемещения, позиционирование и локализацию катетера в объекте.
По альтернативному варианту перемещение катетера в прямом и обратном направлении может также осуществляться пользователем вручную, при этом магнитные поля обеспечиваются только для контролирования направления перемещения катетера, в частности кончика катетера, в объекте.
Средство управления предпочтительно дополнительно выполнено с возможностью управления упомянутым средством перемещения катетера так, что в процессе локализации упомянутого катетера катетеру не сообщается перемещение в прямом и обратном направлении, в частности так, что упомянутый катетер сохраняет свое положение. Если такое средство перемещения катетера не обеспечено, средство управления управляет блоками генерирования сигналов так, что в процессе локализации катетер не перемещается, т.е. поля управления катетером отключены или переключены на градиентное поле, при этом для локализации реализуется MPI-последовательность операций. Если перемещение катетера выполняется вручную, пользователь приостанавливает перемещение катетера в прямом (или обратном) направлении в процессе локализации. Это обеспечивает более высокую точность локализации.
Предпочтительно катушки возбуждения магнитного поля фокусировки (и/или, в конечном счете, катушки возбуждения магнитного поля возбуждения) устройства используются для перемещения катетера через объект. Эти катушки способны генерировать достаточно однородные поля в различных направлениях с достаточно высокой скоростью и при достаточно высокой напряженности поля, отвечая требованиям перемещения катетера. Использование этих катушек, таким образом, обеспечивает также более высокую маневренность, чем в известных стереотаксических системах, поскольку, в общем, магнитные поля могут генерироваться в любом требуемом направлении.
С использованием однородных магнитных полей вращательный момент может прикладываться к соответствующему магнитному объекту, например магнитному элементу, расположенному на кончике катетера или рядом с ним. Крутящий момент, по меньшей мере, достаточен для поджатия магнитного элемента, а значит кончика катетера, вбок, например, чтобы заставить катетер следовать в определенном направлении или следовать по одному из возможных маршрутов либо поджать катетер к чему-то, например сердечной мышце. Предпочтительно требуется приложить дополнительное усилие извне для перемещения вперед/назад, как говорилось ранее, но существует также возможность приложить сильное градиентное поле, чтобы создать (относительно малое) усилие в одном направлении для перемещения катетера вперед или назад.
Кроме того, в одном варианте осуществления средство управления выполнено с возможностью управления упомянутым блоком генерирования сигналов поля выбора так, чтобы исключить генерирование и подачу управляющего тока на катушки возбуждения поля выбора, когда магнитные поля генерируются упомянутыми катушками возбуждения поля фокусировки и/или упомянутыми катушками возбуждения поля возбуждения для перемещения катетера через объект в направлении, заданном командами на перемещение. Это позволяет избежать каких-либо помех при позиционировании катетера (в частности, вызванных магнитными полями, сгенерированными катушками возбуждения поля выбора) в процессе перемещения, осуществляемого с использованием катушек возбуждения поля фокусировки и/или катушек возбуждения поля возбуждения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Эти и другие аспекты изобретения станут понятны из описанных ниже вариантов осуществления. На следующих чертежах:
на Фигуре 1 показан вариант осуществления MPI-устройства;
на Фигуре 2 показан пример диаграммы поля выбора, создаваемой устройством, представленным на Фигуре 1;
на Фигуре 3 показан второй вариант осуществления MPI-устройства;
на Фигуре 4 показана блок-схема MPI-устройства по настоящему изобретению;
на Фигуре 5 показана блок-схема последовательности операций способа по настоящему изобретению.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Перед разъяснением подробностей настоящего изобретения будут детально пояснены основные положения визуализации с использованием магнитных частиц со ссылкой на Фигуры 1-4. В частности, будут описаны два варианта осуществления MPI-сканера, используемого для медицинской диагностики. Также представлено содержательное описание сбора данных. Будут отмечены сходства и различия между этими двумя вариантами осуществления.
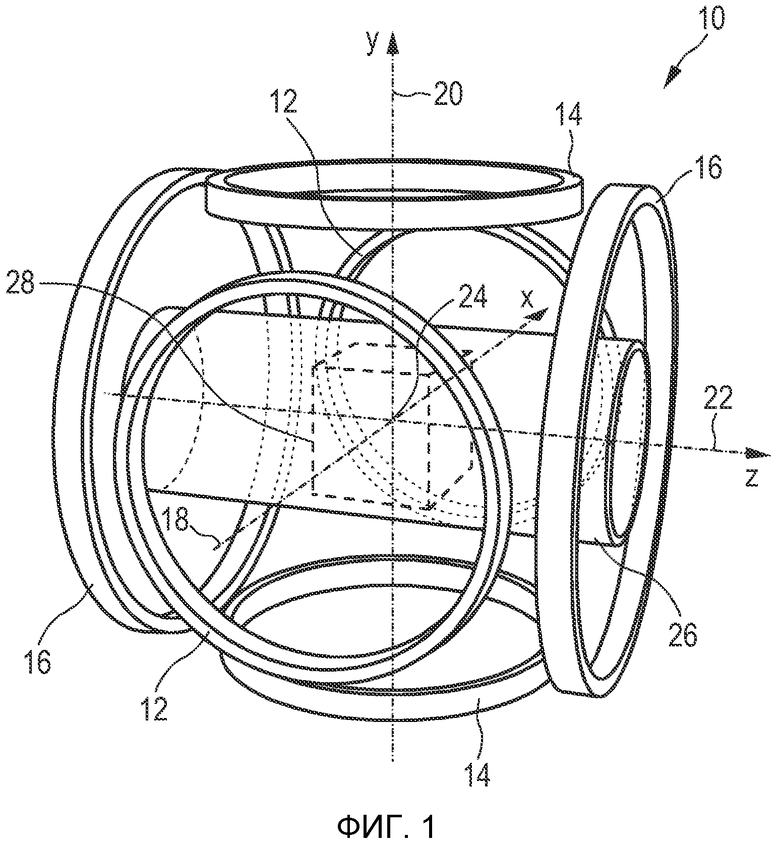
В первом варианте 10 осуществления MPI-сканера, показанном на Фигуре 1, имеются три выделенные пары 12, 14, 16 коаксиальных параллельных кольцевых катушек, при этом каждая пара расположена так, как показано на Фигуре 1. Эти катушечные пары 12, 14, 16 служат для генерирования поля выбора, а также поля возбуждения и поля фокусировки. Оси 18, 20, 22 трех катушечных пар 12, 14, 16 взаимно ортогональны и пересекаются в единственной точке, обозначенной как изоцентр 24 MPI-сканера 10. Кроме того, эти оси 18, 20, 22 служат осями 3D-декартовой системы координат x-y-z, связанной с изоцентром 24. Вертикальная ось 20 соответствует y-оси, а x- и z-оси являются горизонтальными осями. Катушечные пары 12, 14, 16 именуются по своим осям. Например, y-катушечная пара 14 образована катушками, расположенными сверху и снизу сканера. Кроме того, катушку с положительной (отрицательной) y-координатой будем называть y+-катушкой (y--катушкой), и так же для остальных катушек.
Сканер 10 выполнен с возможностью пропускания заданного зависящего от времени электрического тока через каждую из этих катушек 12, 14, 16, причем в каждом из направлений. Если ток протекает в катушке по часовой стрелке, если смотреть вдоль оси этой катушки, он считается положительным, в противном случае - отрицательным. Для генерирования статического поля выбора постоянный положительный ток IS должен протекать через z+-катушку, а ток -Is должен протекать через z--катушку. Z-катушечная пара 16 в этом случае работает как антипараллельная кольцевая катушечная пара.
Магнитное поле выбора, которое, в общем, является градиентным магнитным полем, показано на Фигуре 2 силовыми линиями 50 поля. Оно имеет по существу постоянный градиент в направлении (например, горизонтальной) z-оси 22 z-катушечной пары 16, генерирующей поле выбора, и достигает нулевого значения в изоцентре 24 на оси 22. От этой точки нулевого поля (на Фигуре 2 отдельно не показана) напряженность магнитного поля 50 выбора возрастает во всех трех пространственных направлениях с увеличением расстояния от точки нулевого поля. В первой подзоне или области 52, обозначенной пунктирной линией вокруг изоцентра 24, напряженность поля столь мала, что намагниченность частиц, присутствующих в первой подзоне 52, не достигает уровня насыщения, в то время как намагниченность частиц, присутствующих во второй подзоне 54 (за пределами области 52) соответствует состоянию насыщения. Точка нулевого поля или первая подзона 52 поля 28 обзора сканера предпочтительно представляет собой область, обладающую пространственной когерентностью; она также может представлять собой точечную зону, прямую или плоскую область. Во второй подзоне 54 (т.е. в остальной части поля 28 обзора сканера за пределами первой подзоны 52) напряженность магнитного поля поля выбора достаточно велика, чтобы удерживать магнитные частицы в состоянии насыщения.
С изменением положения двух подзон 52, 54 в пределах поля 28 обзора (общая) намагниченность в поле 28 обзора изменяется. Измеряя намагниченность в поле 28 обзора или физические параметры, на которые намагниченность влияет, можно получить информацию о пространственном распределении магнитных частиц в поле 28 обзора. Для изменения относительного пространственного положения двух подзон 52, 54, расположенных в поле 28 обзора, на поле 50 выбора в поле 28 обзора или, по меньшей мере, части поля 28 обзора накладываются дополнительные магнитные поля, а именно магнитное поле возбуждения и, если возможно, магнитное поле фокусировки.
Для генерирования поля возбуждения через обе x-катушки 12 пропускается зависящий от времени ток ID 1, через обе y-катушки 14 - зависящий от времени ток ID 2, а через обе z-катушки 16 - зависящий от времени ток ID 3. Таким образом, каждая из трех катушечных пар работает как параллельная кольцевая катушечная пара. Аналогичным образом, чтобы сгенерировать поле фокусировки, через обе x-катушки 12 пропускается зависящий от времени ток IF 1, через обе y-катушки 14 - зависящий от времени ток IF 2, а через обе z-катушки 16 - зависящий от времени ток IF 3.
Следует отметить, что z-катушечная пара 16 представляет собой особую пару: она генерирует не только свою долю в поле возбуждения и поле фокусировки, но также и поля выбора. Ток, протекающий через z±-катушку, составляет ID 3+IF 3+IS. Ток, протекающий через остальные две катушечные пары 12, 14, составляет ID k+IF k, где k=1, 2. В силу своей геометрии и симметрии три катушечные пары 12, 14, 16 развязаны между собой. Требуется, чтобы данное условие выполнялось.
Будучи сгенерированным антипараллельной кольцевой катушечной парой, поле выбора является осесимметричным относительно z-оси, при этом его z-компонента практически линейна по координате z и не зависит от координат x и y в значительном по размеру физическом объеме вокруг изоцентра 24. В частности, поле выбора имеет единственную точку нулевого поля (FFP) в изоцентре. Наоборот, вклады в поле возбуждения и поле фокусировки, генерируемые параллельными кольцевыми катушечными парами, являются близкими к однородным в пространственном отношении в значительном по размеру физическом объеме вокруг изоцентра 24 и параллельными оси соответствующей катушечной пары. Поле возбуждения и поле фокусировки, сгенерированные совместно всеми тремя параллельными кольцевыми катушечными парами, являются близкими к однородным в пространственном отношении и могут иметь любое направление и любой уровень напряженности вплоть до некоторого максимального значения напряженности. Поле возбуждения и поле фокусировки также являются зависящими от времени. Различие между полем фокусировки и полем возбуждения заключается в том, что поле фокусировки изменяется медленно во времени и имеет большую амплитуду, в то время как поле возбуждения изменяется быстро и имеет малую амплитуду. Имеются физические и биомедицинские основания обращаться с этими полями отдельно. Быстроменяющееся поле с высокой амплитудой трудно сгенерировать и оно представляет опасность для пациента.
В варианте 10 осуществления MPI-сканера имеется, по меньшей мере, одна дополнительная пара, предпочтительно три дополнительных пары, параллельных кольцевых катушек, опять же ориентированных вдоль x-, y- и z-осей. Эти катушечные пары, которые на Фигуре 1 не показаны, служат приемными катушками. Как и в случае катушечных пар 12, 14, 16 для поля возбуждения и поля фокусировки, магнитное поле, генерируемое постоянным током, протекающим по одной из этих приемных катушечных пар, является близким к однородному в пространственном отношении в пределах поля обзора и параллельным оси соответствующей катушечной пары. Предполагается, что приемные катушки развязаны между собой. Зависящее от времени напряжение, индуцируемое в приемной катушке, подвергается усилению и измеряется приемником, присоединенным к катушке. Если говорить точнее, чтобы справиться с обработкой этого сигнала в огромном динамическом диапазоне, приемник замеряет разность между полученным сигналом и некоторым опорным сигналом. Передаточная функция приемника является ненулевой от DC до точки, в которой ожидаемый уровень сигнала снижается ниже уровня помех.
В варианте 10 осуществления MPI-сканера, показанном на Фигуре 1, имеется цилиндрический туннель 26, расположенный вдоль z-оси 22, т.е. вдоль оси поля выбора. Все катушки расположены снаружи этого туннеля 26. Для сбора данных пациент (или объект), который должен пройти визуализацию (или лечение), размещается в туннеле 26, так чтобы представляющий интерес объем организма пациента, - объем организма пациента (или объекта), который будет визуализирован (или подвергнут лечению), - был охвачен полем 28 обзора сканера - тем объемом сканера, содержание которого сканер способен визуализировать. Пациент (или объект) располагается, например, на столе для пациента. Поле 28 обзора имеет геометрически простой изоцентрический объем во внутреннем пространстве туннеля 26, например, в виде куба, шара или цилиндра. Кубическое поле 28 обзора показано на Фигуре 1.
Размер первой подзоны 52 зависит, с одной стороны, от величины градиента магнитного поля выбора, а с другой стороны, от напряженности магнитного поля, необходимой для насыщения. Для достаточного насыщения магнитных частиц при напряженности магнитного поля, равной 80 А/м, и градиенте (в заданном пространственном направлении) напряженности магнитного поля выбора, достигающем 50×103 А/м2, первая подзона 52, в которой намагниченность частиц ниже уровня насыщения, имеет размеры около 1 мм (в заданном пространственном направлении).
Представляющий интерес объем организма пациента должен содержать магнитные наночастицы. До проведения терапевтических и/или диагностических процедур в отношении, например, опухоли магнитные частицы помещают в представляющий интерес объем, например, посредством жидкости, содержащей магнитные частицы, которую вводят в организм пациента (объект) путем инъекции или вводят пациенту иным способом, например перорально.
В одном варианте осуществления магнитные частицы содержат, например, сферический субстрат из стекла, снабженный слоем из магнитно-мягкого материала, толщина которого составляет, например, 5 нм и который состоит, например, из железоникелевого сплава (например, пермаллоя). Этот слой может иметь покрытие, выполненное, например, из покрывающего слоя, защищающего частицу от химически и/или физически агрессивных сред, например кислотных. Напряженность магнитного поля 50 выбора, которая требуется для магнитного насыщения таких частиц, зависит от различных параметров, например диаметра частиц, используемого магнитного материала для магнитного слоя и других параметров.
При диаметре 10 мкм, например, потребуется магнитное поле напряженностью 800 A/m (что соответствует примерно плотности магнитного потока 1 мТл), а при диаметре 100 мкм будет достаточным магнитное поле напряженностью 80 A/m. Еще меньшие величины получают, когда выбирается покрытие из материала, обладающего меньшей величиной магнитного насыщения, или когда слой имеет меньшую толщину. Магнитные частицы, которые, в общем, могут быть использованы, доступны на рынке под фирменным названием Resovist.
Для получения дополнительной информации об обычно используемых магнитных частицах и композициях частиц можно обратиться к публикациям EP 1304542, WO 2004/091386, WO 2004/091390, WO 2004/091394, WO 2004/091395, WO 2004/091396, WO 2004/091397, WO 2004/091398, WO 2004/091408, которые включены в настоящее описание путем ссылки. В этих документах можно также найти более подробное описание MPI-способа в целом.
Сбор данных начинается в момент времени ts и заканчивается в момент времени te. В процессе сбора данных x-, y- и z-катушечные пары 12, 14, 16 генерируют магнитное поле, зависящее от положения в пространстве и от времени, т.е. прикладываемое поле. Это достигается путем пропускания через катушки соответствующих токов. По существу поле возбуждения и поле фокусировки воздействуют на поле выбора так, что FFP перемещается вдоль предварительно выбранной FFP-траектории, очерчивающей объем сканирования, частью которого является поле обзора. Прикладываемое поле придает ориентацию магнитным наночастицам, находящимся в пациенте. При изменении прикладываемого поля получаемая намагниченность также изменяется, хотя ее реакция на прикладываемое поле является нелинейной. Изменяющееся прикладываемое поле и изменяющаяся намагниченность в сумме индуцируют зависящее от времени напряжение Vk на выводах приемной катушечной пары вдоль xk-осей. Соответствующий приемник преобразует это напряжение в сигнал Sk(t), который он замеряет и подает на выход.
Предпочтительно принимать и детектировать сигналы от магнитных частиц, расположенных в первой подзоне 52, в ином частотном диапазоне (сдвинутом в область более высоких частот), чем тот частотный диапазон, в котором происходят изменения магнитного поля возбуждения. Это возможно выполнить, поскольку появляются частотные составляющие более высоких гармоник частоты магнитного поля возбуждения благодаря изменению намагниченности магнитных частиц в поле 28 обзора сканера вследствие нелинейности характеристик намагничивания.
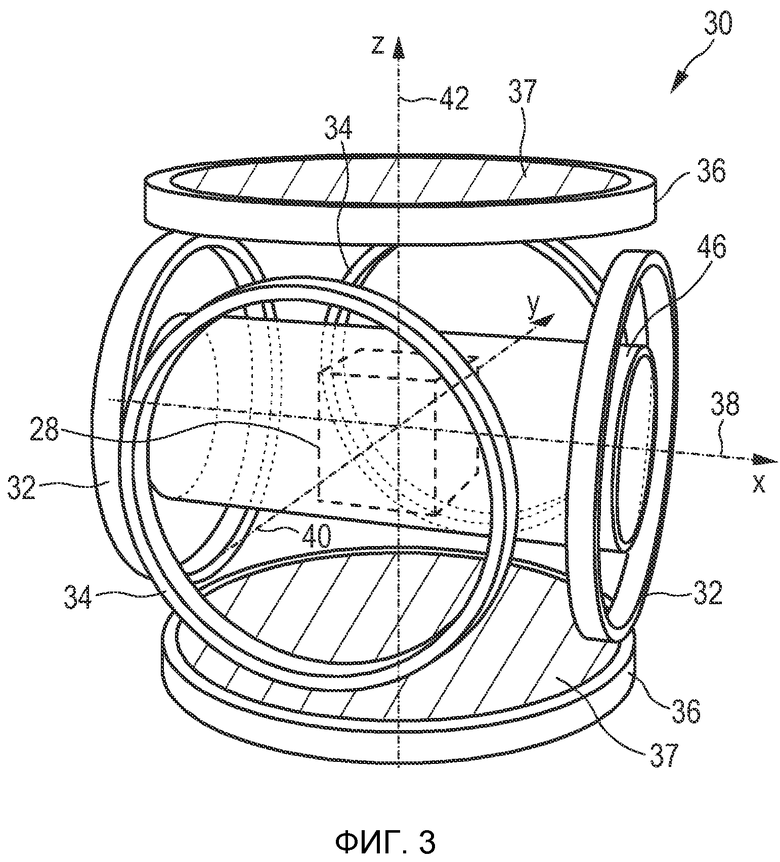
Как и в первом варианте 10 осуществления, показанном на Фигуре 1, во втором 30 варианте осуществления MPI-сканера, показанном на Фигуре 3, имеются три кольцевые взаимно ортогональные катушечные пары 32, 34, 36, однако эти катушечные пары 32, 34, 36 генерируют только поле выбора и поле фокусировки. Z-катушки 36, которые опять же генерируют поле выбора, заполнены ферромагнитным материалом 37. Z-ось 42 в этом варианте 30 осуществления ориентирована вертикально, в то время как x- и y-оси 38, 40 ориентированы горизонтально. Туннель 46 сканера параллелен x-оси 38, а значит перпендикулярен оси 42 поля выбора. Поле возбуждения генерируется соленоидом (не показан) вдоль x-оси 38 и парой отклоняющих катушек (не показаны) вдоль остальных двух осей 40, 42. Эти катушки намотаны вокруг трубки, образующей туннель. Катушки поля возбуждения также служат приемными катушками. Сигналы, принятые приемными катушками, отправляются через высокочастотный фильтр, который подавляет составляющую, привносимую прикладываемым полем.
Несколько типичных параметров в таком варианте осуществления: z-градиент поля выбора, G, имеет величину G/μ0=2,5 Тл/м, где μ0 - магнитная проницаемость вакуума. Генерируемое поле выбора либо совсем не изменяется во времени, либо его изменение является относительно медленным, предпочтительно с частотой примерно от 1 Гц до примерно 100 Гц. Временной частотный спектр поля возбуждения сосредоточен в узкой полосе частот около 25 кГц (примерно до 100 кГц). Спектр полезных частот принимаемого сигнала лежит между 50 кГц и 1 МГц (иногда примерно до 10 МГц). Диаметр туннеля составляет 120 мм. Длина ребра самого большого куба 48, который может поместиться в туннеле 46, составляет 120 мм/
Как показано в приведенных выше вариантах осуществления, различные магнитные поля могут генерироваться катушками одних и тех же катушечных пар путем обеспечения этих катушек соответствующим образом сгенерированными токами. Однако, в особенности с целью расшифровки сигнала при более высоком отношении сигнал-шум, может оказаться предпочтительным, чтобы постоянное во времени (или квазипостоянное) поле выбора и переменные во времени поле возбуждения и поле фокусировки генерировались отдельными катушечными парами. В общем случае для этих катушек могут быть использованы катушечные пары типа Гельмгольца, которые, в общем, известны, например, из области применения магнитно-резонансных устройств с открытыми магнитами (МРТ открытого типа), в которых радиочастотная (RF) катушечная пара расположена над и под представляющей интерес областью, при этом упомянутая RF-катушечная пара способна генерировать переменное во времени магнитное поле. Таким образом, конструкция таких катушек не требует дальнейших разъяснений.
В альтернативном варианте осуществления для генерирования поля выбора могут быть использованы постоянные магниты (не показаны). В пространстве между двумя полюсами таких (противоположных) постоянных магнитов (не показано) образуется магнитное поле, схожее с тем, которое показано на Фигуре 2, т.е. в случае, когда противоположные полюса имеют одинаковую полярность. В другом альтернативном варианте осуществления поле выбора может генерироваться с помощью объединения, по меньшей мере, одного постоянного магнита и, по меньшей мере, одной катушки.
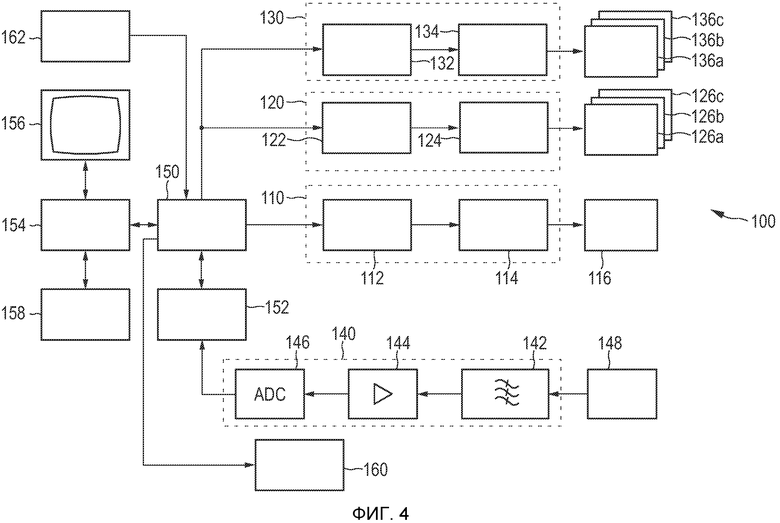
На Фигуре 4 показана общая блок-схема MPI-устройства 10 по настоящему изобретению. Общие принципы визуализации с использованием магнитных частиц и магнитно-резонансной визуализации, которым дано пояснение выше, справедливы и применимы также и в данном варианте осуществления, если не оговорено иное.
Вариант осуществления устройства 100, показанный на Фигуре 4, содержит набор различных катушек для генерирования требуемых магнитных полей. Сначала будут даны пояснения в отношении катушек и их функций при применении MPI-способа.
Для генерирования магнитного (градиентного) поля выбора, о котором говорилось выше, предусмотрены средства выбора, содержащие набор катушек 116 возбуждения поля выбора (SF), предпочтительно содержащий, по меньшей мере, одну пару катушечных элементов. Средство выбора дополнительно содержит блок 110 генерирования сигналов поля выбора. Предпочтительно для каждого катушечного элемента (или каждой пары катушечных элементов) набора 116 катушек возбуждения поля выбора предусмотрен отдельный генераторный подблок. Данный блок 110 генерирования сигналов поля выбора содержит управляемый источник 112 тока возбуждения поля выбора (который обычно включает в себя усилитель), а также блок 114 фильтра, который обеспечивает подачу тока возбуждения поля выбора на соответствующий катушечный элемент возбуждения поля выбора для установки по отдельности величины градиента поля выбора в требуемом направлении. Предпочтительно подается постоянный ток. Если катушечные элементы возбуждения поля выбора расположены в виде противоположных катушек, например на противоположных сторонах поля обзора, токи возбуждения поля выбора в противоположных катушках предпочтительно протекают в противоположных направлениях.
Блок 110 генерирования сигнала поля выбора контролируется управляющим блоком 150, который предпочтительно осуществляет управление блоком 110 генерирования сигнала поля выбора так, чтобы суммарная напряженность поля и суммарная величина градиента во всех пространственных частях поля выбора поддерживались на заданном уровне.
Для генерирования магнитного поля фокусировки устройство 100 дополнительно содержит средство фокусировки, содержащее набор катушек возбуждения поля фокусировки (FF), предпочтительно содержащий три пары 126a, 126b, 126c противоположно расположенных элементов катушек возбуждения поля фокусировки. Упомянутое магнитное поле фокусировки обычно используется для изменения пространственного положения области действия. Катушки возбуждения поля фокусировки контролируются блоком 120 генерирования сигналов поля фокусировки, предпочтительно содержащим отдельный подблок генерирования сигналов поля фокусировки для каждого катушечного элемента (или, по меньшей мере, каждой пары катушечных элементов) упомянутого набора катушек возбуждения поля фокусировки. Упомянутый блок 120 генерирования сигналов поля фокусировки содержит источник 122 тока возбуждения поля фокусировки (предпочтительно содержащий усилитель тока), а также блок 124 фильтра для подачи тока возбуждения поля фокусировки на соответствующую катушку упомянутого подблока катушек 126a, 126b, 126c, который используется для генерирования магнитного поля фокусировки. Блок 120 обеспечения тока возбуждения поля фокусировки также контролируется управляющим блоком 150.
Для генерирования магнитного поля возбуждения устройство 100 дополнительно содержит средство возбуждения, содержащее подблок катушек возбуждения поля возбуждения (DF), предпочтительно содержащий три пары 136a, 136b, 136c противоположно расположенных элементов катушек возбуждения поля возбуждения. Катушки возбуждения поля возбуждения контролируются блоком 130 генерирования сигналов поля возбуждения, предпочтительно содержащим отдельный подблок генерирования сигналов поля возбуждения для каждого катушечного элемента (или, по меньшей мере, каждой пары катушечных элементов) упомянутого набора катушек возбуждения поля возбуждения. Упомянутый блок 130 генерирования сигнала поля возбуждения содержит источник 41 тока возбуждения поля возбуждения (предпочтительно содержащий усилитель тока), а также блок 42 фильтра для подачи тока возбуждения поля возбуждения на соответствующую катушку возбуждения поля возбуждения. Источник 41 тока возбуждения поля возбуждения выполнен с возможностью генерирования переменного тока и также контролируется управляющим блоком 150.
Для детектирования сигналов предусмотрены приемное средство 148, в частности приемная катушка, а также блок 140 приема сигналов, принимающий сигналы, распознанные упомянутым приемным средством 148. Упомянутый блок 140 приема сигналов содержит блок 142 фильтра для фильтрации принятых сигналов детектирования. Задача такой фильтрации заключается в отделении измеренных величин, обусловленных намагничиванием в исследуемой области, на которое оказывает влияние изменение положения двух подобластей (52, 54), от других сигналов, образующих помехи. С этой целью блок 142 фильтра может быть выполнен так, что, например, сигналы, имеющие временные частоты, меньшие, чем временные частоты, с которыми работает приемная катушка 148, или меньше величины, вдовое превышающей эти временные частоты, не пропускаются блоком 142 фильтра. Сигналы далее поступают через усилительный блок 144 на аналого-цифровой преобразователь 146 (ADC). Оцифрованные сигналы, выданные аналого-цифровым преобразователем 146, поступают в блок 152 обработки изображения (называемый также средством реконструкции изображения), который реконструирует пространственное распределение магнитных частиц из этих сигналов с учетом соответствующего положения, приписанного первой подобласти 52 первого магнитного поля в исследуемой области в процессе приема соответствующего сигнала, при этом сигналы поступают в блок 152 обработки изображения из управляющего блока 150. Реконструированное пространственное распределение магнитных частиц, в конечном счете, передается через средство 150 управления на компьютер 154, который его отображает на мониторе 156. Таким образом, может отображаться изображение, показывающее распределение магнитных частиц в поле обзора исследуемой области.
Кроме того, предусмотрен блок 158 ввода информации, например клавиатура. Пользователь, таким образом, может установить желаемое направления наивысшего разрешения и в свою очередь получить соответствующее изображение области действия на мониторе 156. Если необходимое направление, в котором требуется получить наивысшее разрешение, имеет отклонение от направления, установленного пользователем, пользователь, тем не менее, может изменить направление вручную, чтобы получить следующее изображение с повышенным разрешением. Процесс повышения разрешения может также выполняться в автоматическом режиме управляющим блоком 150 и компьютером 154. Управляющий блок 150 в данном варианте осуществления устанавливает градиентное поле в первом направлении, оценка которого производится автоматически, или начальная величина задается пользователем. Направление градиентного поля далее изменяется пошагово, пока разрешение полученных таким образом изображений, сравнение которых производится компьютером 154, не достигнет максимального и соответственно далее не повышается. Таким образом, в автоматическом режиме может быть найдено наиболее важное направление с целью получения максимально высокого разрешения.
Согласно настоящему изобретению управляющий блок 150 выполнен с возможностью управления блоками 110, 120, 130 генерирования сигналов, в частности блоком 120 генерирования сигналов поля фокусировки и/или блоком 130 генерирования сигналов поля возбуждения, с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения, в частности катушки 126a, 126b, 126c поля фокусировки и/или катушки 136a, 136b, 136c поля возбуждения, для генерирования соответствующих магнитных полей с целью перемещения катетера через объект, в частности в пациенте, в направлении, заданном командами на перемещение. Предпочтительно для этой цели используются катушки 126a, 126b, 126c поля фокусировки.
Предпочтительно путем использования однородных магнитных полей, например, сгенерированных упомянутыми катушками 126a, 126b, 126c поля фокусировки, к соответствующему магнитному объекту, например магнитному элементу, расположенному на кончике катетера или рядом с ним, можно приложить крутящий момент. Крутящий момент, по меньшей мере, достаточен для поджатия магнитного элемента, а значит кончика катетера, вбок, например, чтобы заставить катетер следовать в определенном направлении или следовать по одному из возможных маршрутов либо поджать катетер к чему-то, например сердечной мышце. Предпочтительно требуется приложить дополнительное усилие извне для перемещения вперед/назад, как говорилось ранее, но существует также возможность приложить сильное градиентное поле, чтобы создать (относительно малое) усилие в одном направлении для перемещения катетера вперед или назад, как будет пояснено ниже.
Для ввода команд на перемещение предусмотрен интерфейс 162. Упомянутый интерфейс 162 может быть реализован различными способами. Например, упомянутый интерфейс 162 может представлять собой пользовательский интерфейс, с помощью которого пользователь может вводить команды вручную, например, посредством клавиатуры, консоли, джойстика или инструмента навигации, например, установленного на отдельном компьютере (не показан). В другом варианте осуществления упомянутый интерфейс 162 представляет собой интерфейс для связи с внешним устройством для управления движением, таким как навигационный блок, с использованием которого перемещение катетера для текущей интервенционной процедуры планируется заранее, например, на основе данных изображения объекта, собранных заранее с помощью другой технологии визуализации, такой как MR (магнитно-резонансная) или CT (компьютерная томография), либо с использованием данных изображения, собранных с помощью MPI-устройства. На интерфейс 162 далее поступает информация о требуемом перемещении катетера в объекте, при этом либо интерфейс 162, либо управляющий блок 150 способен «перевести» упомянутые команды в команды на перемещение для соответствующих блоков генерирования сигналов.
Следовательно, на практике устройство по настоящему изобретению способно перемещать катетер по объекту, в частности контролировать направление перемещения катетера, на основе команд на перемещение, вне зависимости от того, в какой форме и кем, а также какие именно команды выданы на перемещение.
Кроме того, используя устройство по настоящему изобретению, довольно просто локализовать катетер 190 в объекте 180 в процессе интервенционной процедуры (см. Фигуру 5, иллюстрирующую способ по изобретению на простой блок-схеме последовательности операций). Поскольку катетер 190 оснащен магнитным элементом 194 на своем кончике 192 или рядом с ним, используя известные принципы, заложенные в MPI-способе и устройстве, можно определить местоположение магнитного элемента 194, а значит и катетера 190, в объекте 180 (в данном случае на примере головы пациента).
Например, используя известный MPI-способ, положение может быть найдено из собранных сигналов детектирования после приложения магнитных полей по MPI-схеме для определения местонахождения магнитного элемента. Информация о местоположении может быть сгенерирована либо текущее положение магнитного элемента может быть указано на заданном изображении объекта 180, которое могло быть ранее реконструировано на основе данных, собранных с помощью другой технологии визуализации или того же самого MPI-устройства. Разумеется, если для этой цели используются данные изображений, полученные посредством иной визуализирующей технологии, обычно требуется выполнить этап совмещения для сопоставления этих данных изображения с текущими сигналами детектирования (или данными изображений, реконструированными из них), для чего могут быть использованы известные алгоритмы совмещения.
Например, для перемещения катетера через объект предпочтительно используются катушки поля фокусировки, с помощью которых генерируется однородное магнитное поле в требуемом направлении для осуществления требуемого перемещения катетера. Однако для локализации однородное поле возбуждения (т.е. поле фокусировки) уже более не прикладывается тем же самым образом, а обычно заменяется на градиентное поле (прикладываемое катушкой 116 возбуждения поля выбора (которая может также представлять собой магнит для возбуждения поля выбора или множество катушек возбуждения поля выбора)), при этом магнитные поля прикладываются для перемещения точки нулевого поля вдоль траектории через поле обзора. Таким образом, можно обнаружить магнитный элемент, закрепленный на катетере. В процессе выполнения последовательности MPI-операций, применяемых для локализации, силы, действующие на катетер, сводятся к нулю. Для более быстрого переключения режимов работы может сохраняться некоторая градиентная составляющая в процессе управления катетером.
Перемещение катетера в переднем и заднем направлениях может выполняться вручную, так что магнитные поля ответственны только (или главным образом) за контроль над направлением перемещения кончика катетера. Однако существует также возможность того, что магнитные поля обладают достаточной силой, чтобы (самостоятельно) приложить усилия также для перемещения катетера вперед (или, если требуется, назад), или, по меньшей мере, поддержки перемещения вперед (или назад). В еще одном варианте осуществления может быть предусмотрен блок 160 перемещения катетера, такой как механизм продвижения, содержащий двигатель, как показано в US2003/0125752 A1, с помощью которого выполняется упомянутое перемещение вперед и назад. В этом случае катетер 190 предпочтительно соединен с блоком 160 перемещения катетера с помощью проволочного толкателя 196. Вообще для этой цели может быть использовано устройство любого типа, способное обеспечить перемещение катетера вперед (и со временем назад).
Блок 160 перемещения катетера может управляться непосредственно пользователем. Однако предпочтительно он контролируется управляющим блоком 150, который также позволяет легко прекратить перемещение катетера, когда локализация катетера выполнена.
На Фигуре 5 на простом примере представлен способ по настоящему изобретению. Показаны лишь некоторые элементы устройства 100 по настоящему изобретению.
Как можно видеть на Фигуре 5, катетер 190 введен в полость черепа 180 пациента. В частности, введен кончик 192 катетера 190, при этом на кончике 192 имеется магнитный элемент 194, содержащий легко намагничиваемый материал (или состоящий из него), например мягкую магнитную фольгу. В частности, используется магнитный материал, обеспечивающий перемещение путем приложения магнитных полей, а также локализацию (визуализацию) на основе известных MPI-принципов и аппаратного обеспечения.
Проволочный толкатель катетера 190 соединен с устройством 160 для перемещения катетера в целях прямого и обратного перемещения катетера под контролем управляющего блока 150. Через интерфейс 162 команды на перемещение принимаются с внешнего блока 170 управления перемещением, содержащего дисплей 172 для отображения ранее собранных данных изображения полости черепа пациента, а также орган 174 управления для введения управляющих команд для планирования перемещения катетера.
При хирургическом вмешательстве на практике хирург составляет план проведения вмешательства с использованием блока 170 управления перемещением. Навигационный план, в частности команды управления перемещением, далее передаются через интерфейс 162 на управляющий блок 150 MPI-устройства 100. После этого управляющий блок 150 осуществляет управление устройством 160 для перемещения катетера, а также катушками (не показаны) для обеспечения перемещения катетера 190 в полость черепа пациента. Через требуемые (например, постоянные) интервалы времени перемещение катетера 190 приостанавливается и его текущее местоположение определяется путем выполнения последовательности MPI-операций, предпочтительно путем перемещения FFP вдоль траектории через область, в которой магнитный элемент 194 может находиться в данный момент времени, а также сбора сигналов детектирования, которые далее обрабатываются для определения текущего местонахождения магнитного элемента 194.
Таким образом, может быть получена непосредственная обратная связь в отношении того, соответствует ли действительное положение кончика 192 катетера требуемому положению, так чтобы можно было незамедлительно провести коррекцию либо вручную, либо с помощью управляющего блока 150. С этой целью полученные по результатам локализации данные о местоположении предпочтительно поступают по каналу обратной связи в управляющий блок 150, и/или канал обратной связи предоставлен пользователю, например, посредством выдачи сигнала предупреждения через дисплей 156 устройства 100 и/или дисплей 172 блока 170 управления перемещением катетера, чтобы пользователь мог незамедлительно предпринять действия для корректировки текущего положения.
Хотя изобретение проиллюстрировано и подробно описано на чертежах и в предшествующем описании, такие изображения и описания следует рассматривать как иллюстративные и приведенные в качестве примера, а не ограничивающие, при этом изобретение не ограничивается раскрытыми вариантами осуществления. Специалисты в данной области техники смогут предложить другие изменения в раскрытых вариантах осуществления, реализуя на практике заявленное изобретение, изучив чертежи, описание и прилагаемую формулу изобретения.
В формуле изобретения термин «содержащий» не исключает наличия других элементов или этапов, а единственное число не исключает множественного числа. Единственный элемент или другой блок может выполнять функции нескольких объектов в формуле изобретения. Тот факт, что определенные характеристики упомянуты во взаимно отличающихся пунктах формулы изобретения, не означает, что сочетание этих характеристик не может быть использовано с выгодой.
Ни одна из ссылочных позиций в формуле изобретения не должна рассматриваться как ограничивающая объем изобретения.


Группа изобретений относится к устройству и способу для управления перемещением катетера через объект и для локализации катетера в объекте. Катетер содержит магнитный элемент на своем кончике или рядом с ним. Устройство включает средство выбора, средство возбуждения, приемное средство, средство управления, средство обработки. Средство выбора содержит блок генерирования сигналов поля выбора, а также элементы возбуждения поля выбора, в частности магниты или катушки возбуждения поля выбора, для генерирования магнитного поля выбора, имеющего пространственную диаграмму напряженности магнитного поля, при которой в поле обзора образуются первая подзона, имеющая низкую напряженность магнитного поля, а также вторая подзона, имеющая более высокую напряженность магнитного поля. Средство возбуждения содержит блок генерирования сигналов поля возбуждения, а также катушки возбуждения поля возбуждения для изменения пространственного положения двух подзон в поле обзора посредством магнитного поля возбуждения, так что намагниченность магнитного материала в поле обзора локально изменяется. Приемное средство содержит блок приема сигналов, а также приемную катушку для сбора сигналов детектирования, при этом сигналы детектирования зависят от намагниченности в поле обзора, намагниченность подвержена влиянию изменения пространственного положения первой и второй подзон. Использование изобретения обеспечивает более быстрое передвижение катетера внутри объекта с меньшими ошибками передвижения и более высокой точностью. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Устройство (100) для управления перемещением катетера (190) через объект (180) и для локализации катетера (190) в объекте (180), причем упомянутый катетер (190) содержит магнитный элемент (194) на своем кончике (192) или рядом с ним, при этом устройство содержит:
- средство выбора, содержащее блок (110) генерирования сигналов поля выбора, а также элементы (116) возбуждения поля выбора, в частности магниты или катушки возбуждения поля выбора, для генерирования магнитного поля (50) выбора, имеющего пространственную диаграмму напряженности магнитного поля, при которой в поле (28) обзора образуются первая подзона (52), имеющая низкую напряженность магнитного поля, а также вторая подзона (54), имеющая более высокую напряженность магнитного поля,
- средство возбуждения, содержащее блок (130) генерирования сигналов поля возбуждения, а также катушки (136а, 136b, 136с) возбуждения поля возбуждения для изменения пространственного положения двух подзон (52, 54) в поле (28) обзора посредством магнитного поля возбуждения, так что намагниченность магнитного материала в поле обзора локально изменяется,
- приемное средство, содержащее по меньшей мере один блок (140) приема сигналов, а также по меньшей мере одну приемную катушку (148) для сбора сигналов детектирования, при этом сигналы детектирования зависят от намагниченности в поле (28) обзора, намагниченность подвержена влиянию изменения пространственного положения первой и второй подзон (52, 54),
- средство (150) управления для управления упомянутыми блоками (110, 120, 130) генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для генерирования соответствующих магнитных полей для перемещения катетера (190) через объект (180) в направлении, заданном командами на перемещение, а также для локализации катетера (190) в объекте (180), а также
- средство (154) обработки для обработки упомянутых сигналов детектирования, собранных при приложении соответствующих магнитных полей для локализации катетера (190) в объекте (180), а также для определения положения магнитного элемента (194) катетера (190) в объекте (180) из обработанных сигналов детектирования.
2. Устройство (100) по п. 1, в котором упомянутое средство (150) управления выполнено с возможностью управления упомянутыми блоками (110, 120, 130) генерирования сигналов с целью генерирования и подачи управляющих токов на соответствующие катушки возбуждения для поочередного генерирования соответствующих магнитных полей для перемещения катетера (190) через объект (180) в направлении, заданном командами на перемещение, а также для локализации катетера (190) в объекте (180).
3. Устройство (100) по п. 1, в котором упомянутое средство (150) управления выполнено с возможностью преобразования подаваемых вручную или заданных команд на перемещение в управляющие сигналы для управления упомянутыми блоками (110, 120, 130) генерирования сигналов.
4. Устройство (100) по п. 1, дополнительно содержащее средство (160) перемещения катетера (190) для обеспечения перемещения катетера (190) вперед и назад.
5. Устройство (100) по п. 4, в котором упомянутое средство (150) управления выполнено с возможностью управления упомянутым средством (160) перемещения катетера (190).
6. Устройство (100) по п. 5, в котором упомянутое средство (150) управления выполнено с возможностью управления упомянутым средством перемещения катетера (190) так, что в процессе локализации упомянутого катетера (190) катетеру (190) не сообщается перемещение вперед или назад, в частности так, чтобы упомянутый катетер (190) сохранял свое положение.
7. Устройство (100) по п. 1, дополнительно содержащее средство фокусировки, содержащее блок (120) генерирования сигналов поля фокусировки, а также катушки (126а, 126b, 126с) возбуждения поля фокусировки для изменения пространственного положения поля (28) обзора посредством магнитного поля фокусировки.
8. Устройство (100) по п. 1 или 7, в котором упомянутое средство (150) управления выполнено с возможностью управления упомянутым блоком (120) генерирования сигналов поля фокусировки и/или упомянутым блоком (130) генерирования сигналов поля возбуждения для генерирования и подачи управляющих токов на катушки (126а, 126b, 126с) возбуждения поля фокусировки и/или упомянутые катушки (136а, 136b, 136c) возбуждения поля возбуждения с целью генерирования по существу однородных магнитных полей для перемещения катетера (190) через объект (180) в направлении, заданном командами на перемещение.
9. Устройство (100) по п. 8, в котором упомянутое средство (150) управления выполнено с возможностью управления упомянутым блоком (110) генерирования сигналов поля выбора так, чтобы исключить генерирование и подачу управляющего тока на катушки (116) возбуждения поля выбора, когда магнитные поля генерируются упомянутыми катушками (126а, 126b, 126с) возбуждения поля фокусировки и/или упомянутыми катушками (136а, 136b, 136с) возбуждения поля возбуждения для перемещения катетера (190) через объект (180) в направлении, заданном командами на перемещение.
10. Способ управления устройством по любому из предшествующих пунктов для управления перемещением катетера (190) через объект (180) и локализации катетера (190) в объекте (180), причем упомянутый катетер (190) содержит магнитный элемент (194) на своем кончике (192) или рядом с ним, при этом способ содержит этапы управления упомянутым устройством, заключающиеся в том, что:
- генерируют магнитное поле (50) выбора, имеющее пространственную диаграмму напряженности магнитного поля, при которой в поле (28) обзора образуются первая подзона (52), имеющая низкую напряженность магнитного поля, а также вторая подзона (54), имеющая более высокую напряженность магнитного поля,
- изменяют пространственное положение двух подзон (52, 54) в поле (28) обзора посредством магнитного поля возбуждения, так что намагниченность магнитного материала в поле обзора локально изменяется,
- собирают сигналы детектирования, при этом сигналы детектирования зависят от намагниченности в поле (28) обзора, намагниченность подвержена влиянию изменения пространственного положения первой и второй подзон (52, 54),
- управляют генерированием соответствующих магнитных полей для перемещения катетера (190) через объект (180) в направлении, заданном командами на перемещение, а также для локализации катетера (190) в объекте (180), а также
- обрабатывают упомянутые сигналы детектирования, собранные при приложении соответствующих магнитных полей для локализации катетера (190) в объекте (180), а также для определения положения магнитного элемента (194) катетера (190) в объекте (180) из обработанных сигналов детектирования.
| US 2003125752 A1, 03.07.2007 | |||
| WO 2006067664 A2, 29.06.2006 | |||
| DE 10151778 A1, 08.05.2003 | |||
| US 2004006301 A1, 08.01.2004 | |||
| АППАРАТ, ПЕРЕМЕЩАЕМЫЙ ДАВЛЕНИЕМ В ПОЛОСТИ ТЕЛА | 2005 |
|
RU2346708C2 |

