Изобретение относится к судостроению, в частности к судовым электроэнергетическим установкам с валогенераторами и полупроводниковыми преобразователями частоты.
В качестве преобразователей в валогенераторных установках используются различные схемы, в большинстве, с неуправляемыми выпрямителями, обладающие удовлетворительными энергетическими показателями, надежностью, но преобразователи и установки в целом имеют ограниченные функциональные возможности.
Известна «Судовая валогенераторная установка» [А.В. Григорьев, В.А. Петухов «Современные и перспективные судовые валогенераторные установки»: - СПб, ГМА им. Макарова 2009 г., стр.80, рис 5.1], содержащая главный двигатель, механически соединенный с валогенератором и водопроводом гребного винта фиксированного шага. Выходная электрическая цепь валогенератора соединена с входным диодным выпрямителем преобразователя частоты, а его выходной инвертор соединен с электромашинным компенсатором и, через фильтр и автоматический выключатель, подключен к шинам питания судовых электропотребителей.
Установка имеет ряд недостатков, что ограничивает ее функциональные возможности, и не обеспечивает необходимое качество полученной электроэнергии для питания судовых электропотребителей.
Кроме того, одним из основных недостатков является невысокая надежность, что связано с отсутствием системы компенсации крутильных колебаний водопровода.
Как известно, крутильные колебания судовых водопроводов относятся к опасным динамическим нагрузкам, которые нередко приводят к аварийным повреждениям самих валопроводов, а также и других элементов судовых энергетических установок. В связи с этим обстоятельством, практически все классификационные общества, в том числе Российский морской регистр судоходства и Российский речной регистр, в своих правилах имеют разделы с конкретными требованиями по борьбе с этим явлением.
Попытка решить эту проблему предпринята в конструкции «Электроэнергетической установке судна» [Патент РФ №2110441 от 14.05.1997 г.] Электроэнергетическая установка содержит главный дизель, соединенный водопроводом с гребным винтом, валогенератор с системой возбуждения, кинематически соединенный с главным дизелем и электрически связанный, через преобразователь частоты, с шинами судовой электростанции. Установка также содержит систему управления преобразователя частоты, выход которой подключен к управляющему входу преобразователя, а вход через датчик напряжения - к выходу преобразователя частоты. Кроме того, в установку входит вспомогательный дизель, кинематически соединенный через разъединительную муфту с вспомогательным генератором, снабженным системой возбуждения и электрически соединенным через выключатель с шинами судовой электростанции. Установка также содержит преобразователь тока с регулятором тока и системой управления, выход которого через датчик тока подключен к аккумулятору электроэнергии. Установка включает в себя, соединенные последовательно, датчик упругих колебаний валопровода, фазовращатель и усилитель, выход которого подключен к первому входу регулятора тока аккумулятора, второй вход регулятора соединен с выходом датчика тока аккумулятора, а выход - с входом системы управления преобразователя. Первичная обмотка дополнительно введенного трансформатора соединена с выходом валогенератора, а первая и вторая вторичные обмотки трансформатора связаны соответственно с первым - четвертым входами многопозиционного переключателя, причем первый выход многопозиционного переключателя связан с преобразователем частоты, а второй выход - с преобразователем тока.
В процессе работы установки колебания электромагнитного момента валогенератора осуществляют демпфирование крутильных колебаний в течение всего периода колебаний, что обеспечивается настройкой фазовращателя
Эта установка имеет следующие недостатки:
- пониженные надежность и КПД, повышенные габариты и масса за счет наличия в канале передачи электроэнергии дополнительных силовых элементов;
- передача компенсирующего воздействия от валогенератора осуществляется через коленчатый вал дизеля на валопровод и далее к гребному винту, что вызывает дополнительный износ и сокращает межремонтный ресурс дизеля, может вызвать дестабилизацию работы системы управления дизелем, чем ухудшить процесс сгорания топлива при пониженном качестве компенсации;
- не предусмотрена возможность работы валогенератора в двигательном режиме при необходимом, особенно при аварийном состоянии главного двигателя, отсоединении его вала от валопровода;
- электромеханическая компенсация, с переводом генератора в режим компенсатора реактивной мощности, осуществляется при выводе дизель-генераторного агрегата из нагрузочного режима, что снижает ресурс мощности судовой электростанции;
- не предусмотрена возможность симметрирования напряжения на шинах судовых электропотребителей.
Ряд указанных недостатков описанного выше аналога устраняются в «Судовой валогенераторной установке» [Патент РФ на изобретение №2493047 от 17.02.2012 г.]. Данная установка, выбранная в качестве прототипа как наиболее близкая по структуре к предлагаемой установке, содержит валогенератор, выполненный на базе электрической машины с возбуждением от постоянных магнитов, обратимый полупроводниковый преобразователь частоты, двигатель приводного вала (главный двигатель), механически связанный с валогенератором, который через электрическую цепь, содержащую преобразователь частоты, датчики тока и напряжения, соединен с шинами судовых электропотребителей, к которым также подсоединен вспомогательный генератор, механически связанный с вспомогательным двигателем. Главный двигатель соединен с валогенератором и гребным винтом через редуктор, на выходе к валогенератору и входе которого установлены разъединительные муфты. В упомянутой электрической цепи, между валогенератором и преобразователем частоты, последовательно подключены первый датчик тока и входной дроссель, за преобразователем частоты - выходной дроссель, LC-фильтр, второй датчик тока и первый автоматический выключатель, подсоединенный к шинами судовых электропотребителей. Преобразователь частоты имеет в своем составе встречно включенные электрически обратимые первый и второй выпрямители с векторным управлением, каждый из которых имеет свой контроллер. К каждому выпрямителю на стороне постоянного тока подключен, соответственно, первый и второй датчик тока преобразователя частоты, выходы которых подключены к первым входам контроллеров. Между упомянутыми датчиками тока преобразователя частоты подключен конденсаторный накопитель звена постоянного тока с датчиком напряжения, выход которого подключен ко вторым входам контроллеров. К выходу валогенератора подсоединен датчик входного напряжения, выход которого подсоединен к третьему входу контроллера первого выпрямителя. Датчик выходного напряжения, установленный в электрической цепи перед первым автоматическим выключателем, подсоединен к третьему входу контроллера второго выпрямителя, к четвертому входу которого подсоединен выход второго датчика тока, а первый датчик тока подсоединен к четвертому входу контроллера первого выпрямителя. Установка снабжена, также, задатчиком режимов с внешним управлением, подсоединенным к пятым входам обоих контроллеров, при этом, между вспомогательным генератором и шинами судовых электропотребителей, установлен второй автоматический выключатель. В этой же установке в качестве валогенератора может быть использованы электрическая машина с возбуждением от постоянных магнитов и несколько вспомогательных двигателей, каждый из которых связан с дополнительным генератором.
Установка-прототип, по отношению к предыдущему аналогу, обладает расширенными функциональными возможностями, обеспечивающими высокие энергетические показатели и в совокупности с электромашиной, возбуждаемой постоянными магнитами, позволяет повысить надежность, снизить массу и габариты.
Недостатками данной установки являются:
- отсутствие возможности компенсации крутильных колебаний валопровода;
- отсутствие функции контроля состояния валопровода;
- наличие трехвального редуктора и люфтов, увеличивающихся при динамических воздействиях при передаче механической энергии, усугубляет последствия крутильных колебаний и борьбу с ними.
Таким образом, существует техническое противоречие: одни известные судовые валогенераторные установки обеспечивают возможность компенсации крутильных колебаний валопровода, но их функциональные возможности ограничены, а качество генерируемой электроэнергии понижено, другие установки имеют широкие функциональные возможности, высокое качество генерируемой электроэнергии, но они не обеспечивают компенсацию крутильных колебаний валопровода.
В основу изобретения поставлена задача - решить указанное противоречие, а именно при сохранении высоких электроэнергетических характеристик прототипа расширить функциональные возможности в части:
- обеспечения компенсации крутильных колебаний валопровода между главным двигателем и гребным винтом в генераторном и двигательном режимах валогенератора;
- контроля деформации в зависимости от приложенного механического момента для диагностики состояния валопровода.
Достигаемый технический результат заключается в повышении надежности и увеличении межремонтного ресурса за счет снижения динамических нагрузок на главный двигатель и уменьшения усталостных явлений в материале валопровода.
Поставленная задача решается изменением функциональной схемы установки.
Судовая валогенераторная установка содержит главный двигатель, который через разъединительную муфту и валопровод, подсоединяемый к гребному винту, связан с валогенератором. Валогенератор через электрическую цепь, содержащую последовательно соединенные первый датчик тока, входной дроссель, преобразователь частоты, выходной дроссель, LC-фильтр, второй датчик тока и первый автоматический выключатель, подсоединен к шинами судовых электропотребителей. К шинами судовых электропотребителей через второй автоматический выключатель также подсоединен дополнительный генератор, механически связанный с дополнительным двигателем. Преобразователь частоты имеет в своем составе встречно включенные электрически обратимые первый и второй выпрямители с векторным управлением, каждый из которых имеет свой контроллер. К каждому выпрямителю на стороне постоянного тока подключен, соответственно, первый и второй датчик тока преобразователя частоты, выходы которых подключены к первым входам контроллеров. Между упомянутыми датчиками тока преобразователя частоты подключен конденсаторный накопитель звена постоянного тока с датчиком напряжения, выход которого подключен ко вторым входам контроллеров. К выходу валогенератора подсоединен датчик входного напряжения, выход которого подсоединен к третьему входу контроллера первого выпрямителя. Датчик выходного напряжения, установленный в электрической цепи перед первым автоматическим выключателем, подсоединен к третьему входу контроллера второго выпрямителя, к четвертому входу которого подсоединен выход второго датчика тока, а первый датчик тока подсоединен к четвертому входу контроллера первого выпрямителя. Преобразователь частоты снабжен также задатчиком режимов с внешним управлением, подсоединенным своими двумя выходами, соответственно, к пятым входам обоих контроллеров. От прототипа установка отличается тем, что главный двигатель, валогенератор и гребной винт установлены на валопроводе соосно, а ротор валогенератора закреплен на конце валопровода, подсоединяемом к гребному винту. При этом на валу главного двигателя дополнительно установлен первый датчик положения вала, а на валопроводе со стороны гребного винта дополнительно установлен второй датчик положения вала, оба датчика положения вала подключены к блоку контроля крутильных колебаний, выход которого соединен с сигнальным входом задатчика режимов.
Предпочтительно использование в качестве валогенератора синхронной электрической машины с возбуждением от постоянных магнитов. Однако может быть применена и машина с электромагнитным возбуждением.
Возможно применение нескольких дополнительных двигателей, каждый из которых связан с дополнительным генератором.
Более подробно решение раскрыто в приведенном ниже примере реализации и иллюстрируется чертежом, на котором представлена функциональная схема установки.
Судовая валогенераторная установка включает в себя главный двигатель 1, через разъединительную муфту 2 и валопровод 3 связанный с валогенератором 4, ротор которого закреплен на валопроводе 3. При этом валогенератор 4 установлен на конце валопровода, присоединяемом к гребному винту 5. Валогенератор 4 через электрическую цепь, содержащую преобразователь 6 частоты, датчики тока и напряжения, соединен с шинами 7 судовых электропотребителей, к которым также подсоединен дополнительный генератор 8, механически связанный с дополнительным двигателем 9. На валу главного двигателя 1 установлен первый датчик 10 положения вала, а на конце валопровода 3 вблизи гребного винта 5 установлен второй датчик 11 положения вала. Первый и второй датчики 10 и 11 положения вала подключены к блоку 12 контроля крутильных колебаний.
В упомянутой электрической цепи между валогенератором 4 и преобразователем 6 частоты последовательно подключены первый датчик 13 тока и входной дроссель 14, за преобразователем 6 частоты - выходной дроссель 15, LC-фильтр 16, второй датчик 17 тока и первый автоматический выключатель 18, подсоединенный к шинам 7 судовых электропотребителей.
Преобразователь 6 частоты имеет в своем составе встречно включенные электрически обратимые первый и второй 19 и 20 выпрямители с векторным управлением, каждый из которых имеет свой контроллер 21 и 22 соответственно. К каждому выпрямителю на стороне постоянного тока подключен, соответственно, первый и второй датчики 23 и 24 тока преобразователя частоты. Выход датчика 23 подключен к первому входу контроллера 21, а выход датчика 24 - к первому входу контроллера 22. Между упомянутыми датчиками тока преобразователя 6 частоты подключен электрический накопитель 25 звена постоянного тока с датчиком 26 напряжения, выход которого подключен ко вторым входам контроллеров 21 и 22. К выходу валогенератора 4 подсоединен датчик 27 выходного напряжения, выход которого подсоединен к третьему входу контроллера 21 первого выпрямителя 19. Датчик 28 выходного напряжения, установленный в электрической цепи перед первым автоматическим выключателем 18, подсоединен к третьему входу контроллера 22 второго выпрямителя 20, к четвертому входу которого подсоединен выход второго датчика 24 тока, а первый датчик 23 тока подсоединен к четвертому входу контроллера 21 первого выпрямителя 19. Установка снабжена также задатчиком 29 режимов с обменом информации и внешним управлением через интерфейс, подключенный к входу управления задатчика 29, два его выхода подсоединены к пятым входам обоих контроллеров 21 и 22, а его сигнальный вход соединен с выходом упомянутого блока 12 контроля крутильных колебаний. При этом между дополнительным генератором 8 и шинами 7 судовых электропотребителей установлен второй автоматический выключатель 30.
Судовая валогенераторная установка работает следующим образом.
По управляющему сигналу, поступающему по интерфейсу на управляющий вход задатчика 29, валогенераторная установка может обеспечивать следующие основные режимы работы:
- режим питания шин 7 судовых потребителей с компенсацией крутильных колебаний валопровода;
- двигательный режим автогенератора 4 с компенсацией крутильных колебаний валопровода;
- режим компенсации собственной реактивной мощности, генерируемой в шины 7 судовых электропотребителей;
- режим компенсации реактивной мощности, генерируемой в шины 7 питания судовыми потребителями;
- режим симметрирования по модулю и фазе напряжения на шинах 7 питания судовых потребителей.
В режиме питания судовых потребителей задатчик режимов 29 выдает сигналы задания в контроллеры 21 и 22, которые переводят первый выпрямитель 19 в режим управляемого выпрямления напряжения, поступающего от валогенератора 4 и его поддержании на заданном уровне на электрическом накопителе 25, а второй выпрямитель 20 - в режим инвертора, ведомого сетью (напряжением на шинах 7 судовых потребителей). При этом разъединительная муфта 2 обеспечивает механическое соединение вала главного двигателя 1 с валопроводом 3, первый и второй автоматические выключатели 18 и 30 - замкнуты.
Электроэнергия, генерируемая валогенератором 4, передается на шины 7 судовых электропотребителей следующим образом.
Первый выпрямитель 19 в режиме управляемого выпрямления получает питание от валогенератора 4, обеспечивает плавное накапливание энергии электрическим накопителем 25. Выпрямитель 19 на своем входе формирует ШИМ-напряжение, модулированное по синусоидальному закону, и, с его помощью, воспроизводит на зажимах входного дросселя 14 трехфазную систему векторов синусоидальных напряжений с заданным модулем и углом сдвига для каждой фазы, вращающейся синхронно с трехфазной системой векторов напряжений валогенератора 4.
В выходной цепи выпрямителя 19, подключенной через датчик тока 23 к электрическому накопителю 25, под управлением контроллера 21 нарастает ток. Датчик напряжения 26 передает сигнал обратной связи по напряжению в электрическом накопителе 25 для регулирования (стабилизации при изменении напряжения на выходе валогенератора 4, что особенно важно при использовании валогенератора с возбуждением от постоянных магнитов) контроллером 21 на заданном уровне.
Одновременно во входной цепи первого выпрямителя 19 нарастают фазные токи, амплитуды и фазы которых определяются векторной суммой напряжений на выходе валогенератора 4 и напряжений, воспроизводимых на своем входе выпрямителем 19.
Значения этих токов, измеряемые первым датчиком тока 13 в каждой фазе, и линейных напряжений на выходе валогенератора 4, измеряемые датчиком 27 входного напряжения, представляются в контроллер 21.
В контроллере 21 вычисляются модули и фазовые углы векторов напряжений, которые необходимо воспроизвести на входе первого выпрямителя 19, чтобы, в результате сложения этих векторов с векторами напряжений валогенератора 4, между напряжением валогенератора 4 и током, потребляемым первым выпрямителем 19, был заданный угол сдвига.
Для компенсации реактивной мощности в выходной цепи валогенератора 4 этот угол должен быть близким к нулю.
Постоянное напряжение электрического накопителя 25 преобразуется, под управлением контроллера 22, в ШИМ-напряжение вторым выпрямителем 20, работающим в режиме инвертора, ведомого напряжением на шинах 7 судовых электропотребителей, фильтруется выходным дросселем 15 и LC-фильтром 16 до требуемых характеристик с обеспечением условий параллельной работы в единой энергосистеме с дополнительным генератором 8. При этом между напряжением на шинах 7 судовых электропотребителей и током второго выпрямителя 20, управляемого контроллером 22, устанавливается заданный угол сдвига.
Для компенсации реактивной мощности в цепи второго выпрямителя 20, являющейся выходной цепью преобразователя частоты 6, питающего шины 7, этот угол должен быть близким к нулю.
Для компенсации реактивной мощности, генерируемой судовыми потребителями, выходной ток преобразователя 6, питающий шины 7 судовых электропотребителей, должен устанавливаться с опережением по фазе напряжения на этих шинах.
В случае необходимости, возможно обеспечение электроэнергией шин 7 судовых электропотребителей только от валогенератора 4 с отключением второго выключателя 30. Второй выпрямитель 20 переходит в инверторный режим с преобразованием постоянного напряжения электрического накопителя 25 в переменное напряжение по информации датчиков 17 и 28 и под управлением контроллера 22.
Крутильные колебания валопровода могут быть вызваны возмущающими воздействиями как со стороны гребного винта, например, при ударе лопасти о предмет, препятствующий вращению винта, так и от пульсаций момента вращения главного двигателя, вызывающие резонансные явления в валопроводе. Крутильные колебания проявляются в разности мгновенных значений угла поворота конца валопровода вблизи гребного винта, относительно угла поворота начала валопровода вблизи главного двигателя. Относительно принятой точки отсчета разность мгновенных значений угла может принимать как положительные, так и отрицательные значения.
В режиме питания шин 7 судовых потребителей с компенсацией крутильных колебаний валопровода валогенераторная установка работает следующим образом.
В исходном состоянии главный двигатель 1, через включенную муфту 2, приводит во вращение валопровод 3, ротор валогенератора 4 и гребной винт 5. Валогенераторная установка обеспечивает питание шин 7 судовых электропотребителей по описанному выше алгоритму, а накопитель 25 имеет запас электрической энергии. Под воздействием суммарного статического момента нагрузки (моментов нагрузки от гребного винта и валогенератора) валопровод 3 подвергается упругой деформации, а первый и второй датчики 10 и 11 положения вала, совместно с блоком 12 контроля крутильных колебаний, фиксируют статическую разность относительного углового положения начала и конца валопровода 3.
Значение статической разности относительного углового положения концов валопровода 3, через задатчик 29, по интерфейсу передается в систему управления верхнего уровня (на Фигуре не показана) для диагностики состояния валопровода по величине углового смещения в зависимости от приложенного механического момента.
При статической нагрузке положение конца валопровода 3, присоединяемого к гребному винту 5, принимается за точку отсчета крутильных колебаний, проявляющихся знакопеременными пульсациями момента, приложенного к валопроводу относительно точки отсчета. Информация по амплитудным значениям крутильных колебаний с блока 12 контроля в качестве отрицательной обратной связи передается в задатчик 29 режимов для выработки компенсирующего воздействия.
Формирование компенсирующего воздействия осуществляется через задатчик 29 режимов и контроллер 21 первым выпрямителем 19. Выпрямитель 19 получает суммарный управляющий сигнал от контроллера 21. Управляющий сигнал содержит задаваемую постоянную составляющую амплитуды тока валогенератора 4, соответствующую величине тока, потребляемого судовыми электропотребителями через преобразователь 6. Переменная составляющая амплитуды тока, заданная сигналом отрицательной обратной связи, формирует пульсации механического момента валогенератора 4, противофазные компенсируемым моментам крутильных колебаний валопровода 3.
Так при отставании конца валопровода, присоединяемого к гребному винту 5, от точки отсчета на некоторый угол, нагрузочный момент валогенератора 4 будет снижен и, за счет силы упругости валопровода 3, отставание будет устранено. При опережении гребного винта 5 точки отсчета - нагрузочный момент валогенератора 4 будет увеличен и опережение устранено. При этом глубина обратной связи задатчиком 29 может изменяться.
Напряжение на электрическом накопителе 25, за счет накопленной в нем энергии, остается практически постоянным, что не сказывается на режиме работы второго выпрямителя 20, обеспечивающего питание шин 7.
В двигательном режиме валогенератора 4 первый и второй выпрямители 19 и 20 по сигналу задатчика 29 меняются ролями, разъединительная муфта 2 разъединяет вал главного двигателя 1 от валопровода 3, а дополнительный генератор 8, через замкнутый автоматический выключатель 30, обеспечивает питание шин 7 судовых электропотребителей.
Выключатель 18 тоже замкнут и второй выпрямитель 20 передает энергию, вырабатываемую вспомогательным генератором 8, в электрический накопитель 25 звена постоянного тока с компенсацией реактивной мощности на шинах 7 (по описанному выше алгоритму). Первый выпрямитель 19 получает энергию из электрического накопителя 25 и обеспечивает питанием валогенератор 4 с амплитудно-частотным регулированием, который, в свою очередь, приводит, в регулируемое по частоте вращение, гребной винт 5. В этом режиме при работе валогенератора 4 в качестве гребного электродвигателя, в связи с его расположении вблизи гребного винта, крутильные колебания пренебрежимо малы.
Однако при совместной работе главного двигателя 1 и валогенератора 4 в двигательном режиме на гребной винт 5 с включенной муфтой 2 в валопроводе 3 могут быть возбуждены крутильные колебания и их компенсация необходима.
При возникновении крутильных колебаний валопровода 3 информация по их амплитудным значениям от блока 12 контроля передается в задатчик 29 режимов для выработки компенсирующего воздействия. Валогенератор 4, установленный на противоположном (главному двигателю 1) конце валопровода 3, формирует пульсации вращающего момента относительно заданного среднего значения. Компенсация крутильных колебаний осуществляется по алгоритму, описанному выше для работы валогенератора 4 в генераторном режиме. Отличием является лишь направление пульсирующего момента, прилагаемого валогенератором 4 к валопроводу 3. Но в обоих случаях, амплитуды пульсаций момента валогенератора противофазны крутильным моментам валопровода и демпфируют их.
Возможен режим работы валогенератора 4 и в качестве демпфера крутильных колебаний, когда для получения вращающего момента используется энергия с шин 7 от дополнительных генераторов, и для получения нагрузочного момента энергия возвращается в шины 7 для питания судовых электропотребителей.
Режим компенсации несимметрии векторов трехфазной системы напряжений осуществляется по сигналам датчика выходного напряжения 28 на каждой фазе шин 7 судовых электропотребителей и формирования вторым управляемым выпрямителем 20 компенсирующего воздействия, под управлением контроллера 22. Режим компенсации несимметрии на шинах 7 судовых электропотребителей может осуществляться, по сигналам системы верхнего уровня и задатчика 29, при работе валогенераторной установки в генераторном, двигательном режимах и в режиме статического компенсатора за счет энергетических ресурсов преобразователя 6. Как описано выше (для первого выпрямителя 19), выпрямитель 20 с помощью ШИМ воспроизводит на зажимах выходного дросселя 15 трехфазную систему векторов синусоидальных напряжений с заданным модулем и углом сдвига для каждой фазы, вращающуюся синхронно с трехфазной системой векторов напряжений на шинах 7 судовых электропотребителей. При этом векторы трехфазной системы напряжений выравниваются по модулю с обеспечением взаимного фазового сдвига в 120 электрических градусов.
На схеме представлен один дополнительный двигатель и один дополнительный генератор со своим автоматическим выключателем. Все вышесказанное справедливо при использовании нескольких подобных цепей, включенных параллельно на шины 7.
Таким образом, в валогенераторной установке, в совокупности с функциями, реализованными в прототипе, а именно:
- возможностью работы валогенератора в генераторном и двигательном режиме,
- стабильностью работы установки, исключающей влияние негативных воздействий на ее выходные параметры со стороны входа,
- компенсацией реактивной мощности на шинах электропотребителей,
- возможностью симметрирования по модулю и фазе напряжения в судовой трехфазной сети,
с введением датчиков положений и блока контроля при установке новых связей, корректировке кинематической схемы взаимодействия оборудования и алгоритмов, обеспечено расширение функциональных возможностей и качества работы установки в части:
- обеспечения компенсации крутильных колебаний валопровода в генераторном и двигательном режиме;
- снижения динамических воздействий на главный двигатель, в том числе и в процессе компенсации крутильных колебаний;
- обеспечения контроля остаточной деформации для диагностики состояния валопровода;
- повышения надежности и межремонтного ресурса оборудования пропульсивной установки судна.
Использование генератора с возбуждением от постоянных магнитов с ротором, закрепленным непосредственно на валопроводе, позволяет дополнительно снизить потери энергии, массу, габариты и повысить надежность.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2493047C1 |
| СУДОВАЯ ПРОПУЛЬСИВНАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2543110C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2533869C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2544029C2 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 1997 |
|
RU2110440C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 1997 |
|
RU2110441C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА СУДНА | 1997 |
|
RU2110435C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2521115C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1999 |
|
RU2146209C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1998 |
|
RU2146635C1 |
Изобретение относится к судовым электроэнергетическим установкам с валогенераторами и полупроводниковыми преобразователями частоты. Судовая валогенераторная установка содержит главный двигатель, разъединительную муфту, валопровод, гребной винт, валогенератор, электрическую цепь, первый и второй датчики тока, входной дроссель, преобразователь частоты, выходной дроссель, LC-фильтр, первый и второй автоматические выключатели, шины судовых электропотребителей, дополнительный генератор, механически связанный с дополнительным двигателем, конденсаторный накопитель звена постоянного тока с датчиком напряжения. Главный двигатель, валогенератор и гребной винт установлены на валопроводе соосно. Ротор валогенератора закреплен на конце валопровода, подсоединяемом к гребному винту. На валу главного двигателя дополнительно установлен первый датчик положения вала, а на валопроводе со стороны гребного винта дополнительно установлен второй датчик положения вала. Оба датчика положения вала подключены к блоку контроля крутильных колебаний, выход которого соединен с сигнальным входом задатчика режимов. Достигается повышение надежности и увеличение межремонтного ресурса за счет снижения динамических нагрузок на главный двигатель и уменьшение усталостных явлений в материале валопровода. 2 з.п. ф-лы, 1 ил.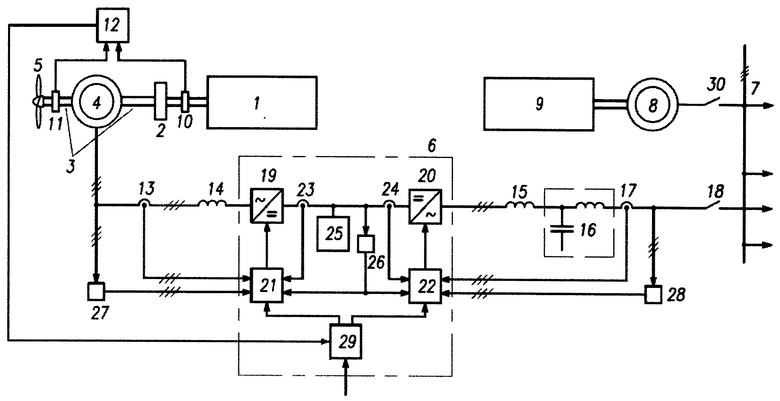
1. Судовая валогенераторная установка, содержащая главный двигатель, который через разъединительную муфту и валопровод, подсоединяемый к гребному винту, связан с валогенератором, который через электрическую цепь, содержащую последовательно соединенные первый датчик тока, входной дроссель, преобразователь частоты, выходной дроссель, LC-фильтр, второй датчик тока и первый автоматический выключатель, подсоединен к шинам судовых электропотребителей, к которым через второй автоматический выключатель, также подсоединен дополнительный генератор, механически связанный с дополнительным двигателем, преобразователь частоты имеет в своем составе встречно включенные электрически обратимые первый и второй выпрямители с векторным управлением, каждый из которых имеет свой контроллер, к каждому выпрямителю на стороне постоянного тока подключен соответственно первый и второй датчик тока преобразователя частоты, выходы которых подключены к первым входам контроллеров, между упомянутыми датчиками тока преобразователя частоты подключен конденсаторный накопитель звена постоянного тока с датчиком напряжения, выход которого подключен ко вторым входам контроллеров, к выходу валогенератора подсоединен датчик входного напряжения, выход которого подсоединен к третьему входу контроллера первого выпрямителя, датчик выходного напряжения, установленный в электрической цепи перед первым автоматическим выключателем, подсоединен к третьему входу контроллера второго выпрямителя, к четвертому входу которого подсоединен выход второго датчика тока, а первый датчик тока подсоединен к четвертому входу контроллера первого выпрямителя, преобразователь частоты снабжен также задатчиком режимов с внешним управлением, подсоединенным своими двумя выходами соответственно к пятым входам обоих контроллеров, отличающаяся тем, что главный двигатель, валогенератор и гребной винт установлены на валопроводе соосно, ротор валогенератора закреплен на конце валопровода, подсоединяемом к гребному винту, на валу главного двигателя дополнительно установлен первый датчик положения вала, а на валопроводе со стороны гребного винта дополнительно установлен второй датчик положения вала, оба датчика положения вала подключены к блоку контроля крутильных колебаний, выход которого соединен с сигнальным входом задатчика режимов.
2. Судовая валогенераторная установка по п.1, отличающаяся тем, что в качестве валогенератора использована электрическая машина с возбуждением от постоянных магнитов.
3. Судовая валогенераторная установка по п.1 или 2, отличающаяся тем, что имеет несколько вспомогательных двигателей, каждый из которых связан с дополнительным генератором.
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2493047C1 |
| Способ дубления пластифицированных желатиновых фотографических эмульсионных слоев | 1958 |
|
SU129483A1 |
| EP 1641098 A1, 29.03.2006 | |||

