Изобретение относится к судостроению, в частности к судовым электроэнергетическим установкам с комбинированным пропульсивным комплексом, содержащим полупроводниковые преобразователи частоты, обладающие высокими энергетическими показателями и надежностью.
Известна «Судовая электроэнергетическая установка» [Патент РФ №124246 от 12.07.2012 г.], содержащая главный двигатель, соединенный с главным генератором, который через электрическую цепь, имеющую в своем составе первый автоматический выключатель, главные шины и преобразователь частоты, соединен с гребным электродвигателем, подсоединяемым к гребному винту, содержащая также шины электропотребителей, соединенные через трансформатор с главными шинами, и содержащая дополнительный двигатель, соединенный с дополнительным генератором, который через второй автоматический выключатель подключен к шинам электропотребителей. В качестве главного генератора и дополнительного генератора в установке использованы трехфазные генераторы с электромагнитным возбуждением, снабженные на выходе, соответственно, первым и вторым датчиками тока фаз. Установка также дополнительно имеет локальную систему управления, выполненную с обеспечением возможности подключения к системе управления верхнего уровня, локальная система управления подсоединена к первому и второму датчикам тока фаз, а также к датчику напряжения, установленному на шинах электропотребителей. Преобразователь частоты выполнен управляемым, обратимым и содержит последовательно соединенные управляемые выпрямитель и инвертор, каждый из которых снабжен собственным контроллером. В выходной силовой цепи выпрямителя и входной силовой цепи инвертора установлены датчики тока, каждый из которых связан с соответствующим информационным входом соответствующего контроллера. С силовым входом управляемого выпрямителя соединен дроссель, подсоединенный другим выводом к датчику напряжения фаз и третьему автоматическому выключателю, который своим другим выводом подключен к главным шинам. Датчик напряжения фаз связан с контроллером выпрямителя. В цепи между датчиком тока выходной силовой цепи выпрямителя и датчиком тока входной силовой цепи инвертора установлен конденсаторный накопитель звена постоянного тока, а также датчик постоянного напряжения, подключенный к обоим контроллерам, которые также подсоединены к задатчику режимов, связанному с локальной системой управления.
Недостатками данной установки являются:
- повышенные потери при преобразовании механической энергии главного двигателя в электрическую, промежуточного и обратного преобразования при работе электрической пропульсивной установки на мощностях, близких к номинальной;
- относительное возрастание потерь энергии из-за снижения пропульсивного КПД гребного винта на пониженных частотах вращения;
- повышенные габариты и масса главного двигателя и главного генератора с электромагнитным возбуждением, использованных в установке;
- пониженная надежность из-за отсутствия резервных каналов передачи энергии со своим гребным винтом;
- потери энергии при маневрировании с использованием традиционных рулевых устройств.
В качестве прототипа выбрана наиболее близкая «Судовая валогенераторная установка» [Патент РФ №119322 от 27.02.2012], относящаяся к комбинированным установкам, обеспечивающая как двигательный режим для раздельной или совместной работы с главным двигателем в пропульсивной установке, так и генераторный режим питания судовых электропотребителей. Установка содержит двигатель приводного вала, механически связанный с валогенератором, который через электрическую цепь, содержащую обратимый управляемый преобразователь частоты, датчики тока и напряжения, соединен с шинами судовых электропотребителей, к которым также подсоединен вспомогательный генератор, механически связанный с вспомогательным двигателем. Двигатель приводного вала соединен с валогенератором через редуктор, на выходе к валогенератору и входе которого установлены разъединительные муфты. В электрической цепи, между подсоединенным к главным шинам валогенератором и преобразователем частоты, последовательно подключены первый датчик тока и входной дроссель, за преобразователем частоты - выходной дроссель, LC-фильтр, второй датчик тока и первый автоматический выключатель, подсоединенный к шинами судовых электропотребителей. Преобразователь частоты имеет в своем составе встречно включенные электрически обратимые первый и второй выпрямители с векторным управлением, каждый из которых имеет свой контроллер. К каждому выпрямителю на стороне постоянного тока подключен, соответственно, первый и второй датчик тока преобразователя частоты, выходы которых подключены к первым входам контроллеров, между упомянутыми датчиками тока преобразователя частоты подключен конденсаторный накопитель звена постоянного тока с датчиком напряжения, выход которого подключен ко вторым входам контроллеров. К выходу валогенератора подсоединен датчик входного напряжения, выход которого подсоединен к третьему входу контроллера первого выпрямителя. Датчик выходного напряжения, установленный в электрической цепи перед первым автоматическим выключателем, подсоединен к третьему входу контроллера второго выпрямителя, к четвертому входу которого подсоединен выход второго датчика тока, а первый датчик тока подсоединен к четвертому входу контроллера первого выпрямителя. Установка снабжена также задатчиком режимов с внешним управлением (от системы управления установки борта или системы управления верхнего уровня), подсоединенным к пятым входам обоих контроллеров, при этом между вспомогательным генератором и шинами судовых электропотребителей установлен второй автоматический выключатель.
В этой же установке в качестве валогенератора может быть использованы электрическая машина с возбуждением от постоянных магнитов и несколько вспомогательных двигателей, каждый из которых связан с дополнительным генератором.
Эта установка имеет следующие недостатки:
- повышенные потери из-за снижения пропульсивного КПД общего гребного винта на пониженных частотах вращения;
- при наличии редуктора снижение КПД установки, увеличение массы и габаритов;
- пониженная надежность из-за отсутствия резервных каналов передачи энергии со своим гребным винтом;
- потери энергии при маневрировании с использованием традиционных рулевых устройств.
Задача, решаемая изобретением, - расширение арсенала средств и создание новой судовой электроэнергетической установки с системой электродвижения в комбинированном пропульсивном комплексе с улучшенными энергетическими характеристиками и расширенными функциональными возможностями.
Достигаемый комплексный технический результат заключается в обеспечении:
- оптимального распределения рабочих диапазонов оборудования пропульсивного комплекса для минимизации потерь энергии при различных скоростях движения судна, а именно: совместным вращением общего гребного винта тепловым двигателем и системой электродвижения, раздельным вращением общего гребного винта с прямой передачей механической энергии от теплового двигателя и от гребного электродвигателя системы электродвижения, а на пониженных скоростях и при маневрировании, с помощью отдельного канала системы электродвижения на базе погружаемого и азимутально управляемого гребного электродвигателя кольцевой конструкции с встроенным своим гребным винтом;
- передачей механической энергии от теплового двигателя непосредственно на гребной винт (или от высокооборотного теплового двигателя с частотой вращения от 1000 об/мин, на входной вал винто-рулевой колонки, в случае ее применения вместо общего гребного винта);
- снижения потерь энергии и экономии топлива за счет использования дополнительной погружаемой двигательно-движительной системы с гребным винтом, рассчитанным для движения на пониженных скоростях и маневрирования судна;
- дополнительного снижения потерь энергии и экономии топлива за счет использования системы электродвижения для подкрутки общего гребного винта с целью обеспечения минимизации гидродинамических потерь (при отсоединении приводного вала винта от главного гребного двигателя);
- уменьшения массы и габаритов за счет применения электрических гребных двигателей и генераторов с возбуждением от постоянных магнитов, за счет применения тепловых двигателей с повышенной частотой вращения, в том числе и главного двигателя, приводящего во вращение с повышенной частотой вал винторулевой колонки;
- передачи электрической энергии от главного генератора к гребным электродвигателям и от главных шин к шинам питания электропотребителей через преобразователь частоты с векторным управлением, обеспечивающий регулирование частоты вращения в широком диапазоне, повышение КПД, симметрирование, фильтрацию и компенсацию реактивной составляющей тока во входной и выходной цепи.
Поставленная комплексная задача решается изменением функциональной схемы установки.
Судовая электроэнергетическая установка с комбинированным пропульсивным комплексом имеет в своем составе главный тепловой двигатель, разъединительную муфту, дополнительный тепловой двигатель, механически соединенный с дополнительным генератором, главные шины, шины питания судовых электропотребителей, систему управления установки, автоматические выключатели, датчики тока и датчики напряжения, а также первый управляемый и обратимый преобразователь частоты. В состав первого преобразователя частоты входит последовательно соединенные управляемые выпрямитель и инвертор, каждый из которых снабжен собственным контроллером. В выходной силовой цепи выпрямителя и входной силовой цепи инвертора установлены датчики тока, каждый из которых связан с соответствующим информационным входом соответствующего контроллера. Во входной цепи преобразователя частоты установлены датчик напряжения фаз и датчик тока фаз, который, через дроссель преобразователя, соединен с силовым входом управляемого выпрямителя. Информационные выходы упомянутых датчиков соединены с соответствующими входами контроллера выпрямителя. В цепи между датчиком тока выходной силовой цепи выпрямителя и датчиком тока входной силовой цепи инвертора установлен конденсаторный накопитель звена постоянного тока, а также датчик постоянного напряжения, подключенный к обоим контроллерам. Оба контроллера также подсоединены к локальному блоку управления, который соединен с системой управления установки. От прототипа установка отличается тем, что дополнительно содержит подсоединяемый к гребному винту первый гребной электродвигатель, установленный соосно главному тепловому двигателю через разъединительную муфту, также дополнительно содержит второй гребной электродвигатель кольцевой конструкции с встроенным вторым гребным винтом, а также второй преобразователь частоты, функциональная схема которого идентична функциональной схеме первого преобразователя частоты. Элементы судовой электроэнергетической установки можно условно отнести к четырем силовым электрическим цепям.
Первая силовая электрическая цепь содержит последовательно соединенные первый автоматический выключатель, первый датчик тока фаз, первый обратимый управляемый преобразователь частоты, причем первый датчик тока фаз подсоединен информационным выходом к первому информационному входу первого обратимого управляемого преобразователя частоты, управляющий выход которого подключен к управляющему входу первого автоматического выключателя, подключенного к статорным обмоткам первого гребного электродвигателя.
Вторая силовая электрическая цепь содержит дополнительный генератор и второй датчик тока фаз.
Третья силовая электрическая цепь содержит последовательно соединенные упомянутый второй гребной электродвигатель, второй автоматический выключатель, третий датчик тока фаз, второй преобразователь частоты, аналогичный первому, управляющий выход которого подключен к управляющему входу второго автоматического выключателя, а первый информационный вход - к информационному выходу третьего датчика тока фаз.
Четвертая силовая электрическая цепь содержит понижающий преобразователь.
Первая, вторая, третья и четвертая силовые цепи подсоединены к главным шинам через третий, четвертый, пятый и шестой автоматические выключатели соответственно. Управляющие входы этих автоматических выключателей подсоединены к системе управления установки, к которой также подсоединены второй управляющий вход первого преобразователя частоты, информационный выход второго датчика тока фаз, датчики напряжения фаз, управляющий вход разъединительной муфты и блоки управления главного и дополнительного тепловых двигателей. Второй управляющий вход второго преобразователя частоты подсоединяется к системе управления верхнего уровня, соединенной с системой управления установкой.
Предпочтительно выполнение понижающего преобразователя управляемым на базе обратимого управляемого преобразователя частоты, функциональная схема которого идентична функциональной схеме первого преобразователя частоты. В этом случае четвертая силовая цепь имеет в своем составе соединенные последовательно третий обратимый управляемый преобразователь частоты, дроссель, LC фильтр и четвертый датчик тока фаз и датчик выходного напряжения понижающего преобразователя, управляющие входы которых подсоединены к третьему обратимому управляемому преобразователю, третий управляющий вход которого подсоединен к системе управления установки. Такое исполнение понижающего преобразователя необходимо вследствие того, что в качестве дополнительного генератора предпочтительно использование синхронного генератора с возбуждением от постоянных магнитов, частота и напряжение на выходе которого зависит от нагрузки, а также с целью снижения массы и габаритов такая электромашина может выполняться на повышенную частоту выходного переменного напряжения. Однако в качестве дополнительного генератора не исключается возможность применения и электромашины с электромагнитным возбуждением. В этом случае возможно применение трансформатора напряжения в качестве понижающего преобразователя.
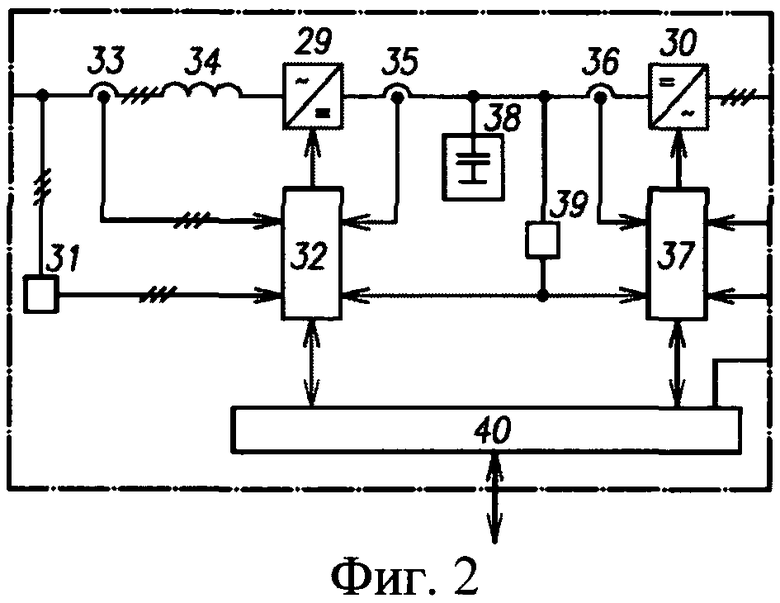
На Фиг.1 представлена схема установки с применением обратимого управляемого понижающего преобразователя, на Фиг.2 - схема преобразователей частоты. На схемах введены следующие обозначения:
1 - главный тепловой двигатель, 2 - муфта разъединительная, 3 - первый гребной электродвигатель, 4 - главный гребной винт (или винт винторулевой колонки) фиксированного шага, 5 - первый автоматический выключатель, 6 - первый датчик тока фаз, 7 - первый преобразователь частоты, 8 - дополнительный генератор - синхронный генератор с возбуждением от постоянных магнитов, 9 - дополнительный тепловой двигатель, 10 - второй датчик тока фаз, 11 - второй преобразователь частоты, 12 - третий датчик тока фаз, 13 - второй автоматический выключатель, 14 - второй гребной электродвигатель кольцевой конструкции с встроенным вторым гребным винтом, 15 - главные шины, 16 - шины питания судовых электропотребителей, 17 - обратимый понижающий преобразователь (ПП), 18, 19, 20, 21, 22 - третий, четвертый пятый, шестой и седьмой автоматические выключатели соответственно, 23 и 24 - блоки управления главного и дополнительного тепловых двигателей соответственно, 25 - система управления установки борта, 26 и 27 - датчики напряжения фаз, 28 - система управления верхнего уровня, а также элементы, входящие в состав преобразователей частоты (7 или 11 или преобразователя частоты, входящего в понижающий преобразователь 17 - см. Фиг.2):
29 - обратимый выпрямитель преобразователя частоты (ПЧ), 30 - инвертор, 31 - датчик входного напряжения фаз ПЧ, 32 - контроллер выпрямителя 29, 33 - датчик входного тока фаз ПЧ, 34 - дроссель ПЧ, 35 и 36 - датчики токов звена постоянного тока, 37 - контроллер инвертора 30, 38 - конденсаторный накопитель, 39 - датчик напряжения звена постоянного тока, 40 - локальный блок управления ПЧ, а также элементы, входящие в состав обратимого понижающего преобразователя ПП 17:
41 - преобразователь частоты ПП, 42 - дроссель ПП, 43 - фильтр, 44 - четвертый датчик тока фаз, 45 - датчик выходного напряжения фаз ПП, 46 и 47 - восьмой и девятый автоматические выключатели (межсекционные, соединяющие соответствующие шины установки другого борта судна).
Силовой вход второго преобразователя частоты 11 может быть подключен через соответствующий автоматический выключатель к главным шинам другого борта (на Фиг.1 не показаны).
Судовая электроэнергетическая установка с комбинированным пропульсивным комплексом содержит главный тепловой двигатель 1, вал которого механически соединен через разъединительную муфту 2, входной и выходной вал ротора первого гребного электродвигателя 3 с главным гребным винтом 4 фиксированного шага (или входным валом винторулевой колонки со своим гребным винтом). Электродвигатель 3 статорными обмотками через первый автоматический выключатель 5 и первый датчик 6 тока фаз подключен к выходной силовой цепи первого преобразователя 7 частоты. Элементы 3, 5, 6 и 7 образуют первую силовую электрическую цепь. Входная силовая цепь первого преобразователя 7 частоты через третий автоматический выключатель 18 подключена к главным шинам 15.
К главным шинам 15 через четвертый автоматический выключатель 19 и второй датчик 10 тока фаз своими статорными обмотками подключен дополнительный (синхронный) генератор 8 с возбуждением от постоянных магнитов, механически соединенный с дополнительным тепловым двигателем 9. Элементы 8, 9, 10 образуют вторую силовую электрическую цепь.
Также к главным шинам 15 через пятый автоматический выключатель 20 подключена входная силовая цепь второго преобразователя 11 частоты. Выходная силовая цепь преобразователя 11, третий датчик 12 тока фаз и второй автоматический выключатель 13 подключена к погружаемому и азимутально управляемому второму гребному электродвигателю 14 кольцевой конструкции с встроенным вторым гребным винтом. Перечисленные элементы образуют третью силовую электрическую цепь.
К главным шинам 15 через шестой автоматический выключатель 21, понижающий управляемый полупроводниковый преобразователь 17 и седьмой автоматический выключатель 22 подключены шины 16 питания судовых электропотребителей. В случае применения в качестве дополнительного генератора электромашины с электромагнитным возбуждением в схеме между шестым и седьмым автоматическими выключателями 21 и 22 устанавливается трансформатор напряжения (на Фиг.1 не показан).
К шинам 16 могут быть подключены также один или несколько резервных источников питания (на Фиг.1 не показаны).
Блоки управления 23 и 24 главного и дополнительного тепловых двигателей соответственно 1 и 9, первый преобразователь 7 частоты и понижающий преобразователь 17 соединены интерфейсом с системой управления 25 установки борта, с которой связан управляющий вход разъединительной муфты 2, управляющие входы третьего, четвертого, пятого, шестого и седьмого автоматических выключателей (18, 19, 20, 21, 22 соответственно), информационные выходы второго датчика 10 тока фаз и датчиков 26 и 27 напряжения фаз, подключенных к шинам 15 и 16 соответственно. Система управления 25 установкой борта интерфейсом связана с системой управления 28 верхнего уровня, которая также интерфейсом связана со вторым преобразователем 11 частоты.
В качестве преобразователей частоты применен описанный в прототипе обратимый преобразователь частоты, представленный на Фиг.2. В состав первого и второго преобразователей 7, 11 частоты, а также в третий преобразователь 41 частоты, входящий в понижающий преобразователь 17, входят последовательно соединенные управляемые выпрямитель 29 и инвертор 30, каждый из которых снабжен собственным контроллером 32 и 37 соответственно. В выходной силовой цепи выпрямителя 29 установлен датчик тока 35, соединенный с соответствующим информационным входом контроллера 32, во входной силовой цепи инвертора 30 установлен датчик тока 36, соединенный с соответствующим информационным входом контроллера 37. Во входной цепи преобразователя частоты установлены датчик 31 напряжения фаз и датчик 33 тока фаз, который через дроссель 34 преобразователя соединен с силовым входом управляемого выпрямителя 29, а информационные выходы датчиков 31 и 33 соединены с контроллером 32 выпрямителя. В цепи между датчиками тока 35 и 36 установлен конденсаторный накопитель 38 звена постоянного тока, а также датчик 39 постоянного напряжения, подключенный к обоим контроллерам. Контроллеры 32 и 37 также подсоединены к локальному блоку управления 40, связанному интерфейсом с системой управления 25 установки. Для второго преобразователя частоты 11 установлена связь интерфейсом с системой управления 28 верхнего уровня.
В состав понижающего преобразователя (ПП) 17 входит аналогичный преобразователям 7 и 11 преобразователь 41 частоты ПП, силовой вход которого являющийся входом ПП соединен с шестым автоматическим выключателем 21. Силовой выход преобразователя 41 через дроссель ПП 42, фильтр 43 и датчик 44 тока фаз ПП соединен с входом датчика 45 напряжения фаз ПП, который, являясь выходом понижающего преобразователя 17, соединен с седьмым автоматическим выключателем 22. Информационные выходы датчиков 44 и 45 подключены к соответствующим входам преобразователя 41, связанного по интерфейсу с системой управления 25 пропульсивной установкой борта. При применении в качестве ПП трансформатора указанная связь с системой управления 25, естественно, отсутствует.
В преобразователях 7 и 11 частоты к соответствующим входам контроллера 37 подключены датчики 6 и 12 тока фаз соответственно. В преобразователе 41 к третьему входу контроллера 37 подключен датчик 44 тока фаз, а к четвертому - датчик 45 напряжения фаз. В преобразователях 7 и 11 частоты локальные блоки управления 40 подсоединены к соответствующим управляющим входам автоматических выключателей 5 и 13 соответственно, а в преобразователе 41 такое соединение не используется, как сказано выше, управление седьмым автоматическим выключателем 22 осуществляется от системы управления 25.
Силовой вход второго преобразователя 11 частоты может быть подключен через соответствующий автоматический выключатель к главным шинам другого борта (на Фиг.1 не показаны). Главные шины 15 и шины 16 питания судовых электропотребителей с помощью восьмого и девятого, соответственно 46 и 47, межсекционных автоматических выключателей могут быть подключены к соответствующим шинам установки соседнего борта (на Фиг.1 не показаны).
Судовая электроэнергетическая установка с комбинированным пропульсивным комплексом работает следующим образом.
Электроэнергетическая установка борта получает электроэнергию от дополнительного синхронного генератора 8, приводимого во вращение дополнительным тепловым двигателем 9. Тепловой двигатель 9 работает под непосредственным управлением блока управления 24, получающего сигналы и по интерфейсу от системы управления 25 установки борта, в соответствии с заданиями, поступающими от системы управления 28 верхнего уровня в порядке обмена информацией. Система управления 25 получает информацию от датчиков 26 и 27 напряжения фаз, а также по фазным токам от второго датчика 10 тока фаз дополнительного генератора 8 и по мгновенным значениям фазных напряжений на главных шинах 15 и шинах 16 питания судовых электропотребителей, вычисляет частоту вращения генератора 8 и управляет ею. Величина выходного напряжения дополнительного генератора 8 с возбуждением от постоянных магнитов зависит от тока нагрузки. Компенсация этой зависимости осуществляется изменением частоты вращения. Электроэнергия генератора 8 через замкнутый четвертый автоматический выключатель 19 поступает на главные шины 15 для обеспечения питанием системы электродвижения, а также электроэнергия поступает через понижающий преобразователь 17 при замкнутых автоматических выключателях 21, 22 на шины 16 питания судовых электропотребителей.
По сигналам системы управления 28 верхнего уровня комбинированный пропульсивный комплекс может работать в следующих четырех основных режимах:
- с прямой передачей механической энергии на главный гребной винт от главного теплового двигателя;
- с передачей механической энергии на главный гребной винт от первого гребного электродвигателя;
- с одновременной передачей суммарной механической энергии на главный гребной винт от главного теплового двигателя и от первого гребного электродвигателя;
- с передачей механической энергии на второй встроенный гребной винт от погружаемого второго гребного электродвигателя 14 кольцевой конструкции.
Кроме того, во всем диапазоне скоростей движения судна структурой и конструктивным исполнением оборудования, а также алгоритмом управления данной электроэнергетической установки с комбинированным пропульсивным комплексом реализован энергоэффективный экономичный режим работы с обеспечением повышения качества электроэнергии, используемой для питания судовых электропотребителей.
При движении судна с приводом от главного гребного винта 4 (первые три режима, перечисленные выше) гребной электродвигатель 14 кольцевой конструкции находится в поднятом состоянии и располагается в специальной нише внутри обводов судна. Это обеспечивает снижение гидродинамического сопротивления движению судна, потерь энергии и экономию топлива.
В первом режиме при прямой безредукторной передаче механической энергии от главного теплового двигателя 1 частота вращения главного гребного винта 4 может изменяться в достаточно широких пределах под управлением системы 28 верхнего уровня. Однако с целью снижения потерь энергии и экономии топлива диапазон рабочих частот вращения главного двигателя 1 ограничен. Главный тепловой двигатель 1 в экономичном режиме работает на частотах вращения, близких к номинальной, с максимальным КПД. При этом и главный гребной винт 4 имеет максимальный пропульсивный КПД на этих частотах вращения, чем достигается наиболее экономичный режим работы пропульсивной установки с прямой передачей энергии.
С применением механической винторулевой колонки со своим гребным винтом 4 и передачей механической энергии непосредственно на ее входной вал потери энергии возрастут за счет наличия внутренней кинематической передачи. Однако это может быть оправдано суммарным снижением массы и габаритов в связи с использованием теплового двигателя 1 и гребного электродвигателя 3 с повышенной номинальной скоростью вращения до 1000-1500 об/мин. При этом винторулевая колонка будет использоваться и как средство активного управления судном.
Питание судовых электропотребителей в первом режиме может осуществляться как от дополнительных источников электроэнергии (на Фиг.1 не показаны), так и от дополнительного генератора 8, через главные шины 15 и понижающий преобразователь 17. При этом преобразователем 17 могут быть реализованы алгоритмы компенсации реактивной мощности и симметрирования трехфазной системы напряжений на шинах 16 питания судовых электропотребителей, описанные ниже.
Во втором режиме при передаче механической энергии на главный гребной винт 4 (или винт винторулевой колонки) от первого гребного электродвигателя 3 муфта 2 по сигналу управления от системы 25 разъединяет вал ротора электродвигателя 3 от выходного вала главного теплового двигателя 1. При замкнутых автоматических выключателях 5 и 18 электроэнергия, вырабатываемая генератором 8, через преобразователь 7 частоты, поступает на статорные обмотки электродвигателя 3, который приводит во вращение гребной винт 4. Преобразователь 7 частоты может изменять частоту вращения электродвигателя 3 и гребного винта 4 фиксированного шага в широких пределах. С целью снижения потерь энергии и экономии топлива диапазон рабочих частот вращения электродвигателя 3 ограничен. В экономичном режиме переход на вращение главного гребного винта 4 от электродвигателя 3 осуществляется при совмещении частот вращения - нижней граничной частоты экономичного рабочего диапазона главного двигателя 1 и верхней граничной частоты рабочего диапазона электродвигателя 3. Переход на привод во вращение гребного винта от двигателя 1 на вращение от электродвигателя 3 может осуществляться плавным приемом нагрузки при включенной муфте 2 с последующим ее отключением. Питание судовых электропотребителей во втором режиме может осуществляться как от дополнительных источников электроэнергии (на Фиг.1 не показаны), так и от генератора 8, через главные шины 15 и понижающий преобразователь 17. При этом преобразователем 17 могут быть реализованы алгоритмы компенсации реактивной мощности и симметрирования трехфазной системы напряжений на шинах 16 питания судовых электропотребителей, описанные ниже.
В третьем режиме для суммирования и одновременной передачи механической энергии на главный гребной винт 4 от главного теплового двигателя 1 и от гребного электродвигателя 3 первый преобразователь 7 синхронизируется с ЭДС, вырабатываемыми статорными трехфазными обмотками электродвигателя 3 и принимает нагрузку. При этом частота вращения гребного винта 4 может быть повышена при ограничении выходной мощности главного двигателя 1 и электродвигателя 3. С учетом снижения пропульсивного КПД гребного винта 3 на частотах вращения выше номинальной, такой режим работы пропульсивной установки может применяться в особых случаях для достижения максимальной скорости судна. Питание судовых электропотребителей в третьем режиме может осуществляться как от дополнительных источников электроэнергии (на Фиг.1 не показаны), так и от генератора 8, через главные шины 15 и понижающий преобразователь 17. При этом преобразователем 17 могут быть реализованы алгоритмы компенсации реактивной мощности и симметрирования трехфазной системы напряжений на шинах 16 питания судовых электропотребителей, описанные ниже.
В четвертом режиме для движения судна на малых скоростях и при маневрировании гребной электродвигатель 14 кольцевой конструкции выдвигается (погружается) за обводы судна. Нижняя граничная частота экономичного рабочего диапазона электродвигателя 3 сопрягается с верхней граничной частотой рабочего диапазона погружаемого гребного электродвигателя 14 кольцевой конструкции с встроенным вторым гребным винтом. Мощность электродвигателя 14 выбирается для обеспечения движения судна в нижнем диапазоне скоростей - от номинальной частоты вращения второго гребного винта электродвигателя 14 с максимальным пропульсивным КПД и ниже.
С целью обеспечения минимизации гидродинамических потерь от гребного винта 4 при движении судна от электродвигателя 14 на малых ходах и при маневрировании под управлением системы 25 возможен режим работы преобразователя 7 для подкрутки электродвигателем 3 гребного винта 4 (при отсоединении муфтой 2 приводного вала винта от главного гребного двигателя 1). С учетом возможностей азимутального управления, высокого пропульсивного КПД гребного винта, встроенного в гребной электродвигатель 14 кольцевой конструкции, оптимального амплитудно-частотного управления им обеспечивается снижение потерь энергии и экономия топлива на малых ходах и маневровых режимах судна. Питание судовых электропотребителей в четвертом режиме может осуществляться как от дополнительных источников электроэнергии (на Фиг.1 не показаны), так и от генератора 8, через главные шины 15 и понижающий преобразователь 17. При этом преобразователем 17 могут быть реализованы алгоритмы компенсации реактивной мощности и симметрирования трехфазной системы напряжений на шинах 16 питания судовых электропотребителей, описанные ниже.
Электроприводы главного гребного винта 4 и встроенного гребного винта электродвигателя 14 кольцевой конструкции с преобразователями 7 и 11 частоты, реализованными по схеме прототипа, представленной на Фиг.2, работают следующим образом.
По сигналу, поступающему на вход системы управления 25 пропульсивной установкой борта от системы управления 28 верхнего уровня, работающие электроприводы могут быть переведены в режимы движения, торможения и реверса с компенсацией собственной реактивной мощности, генерируемой в главных шинах 15.
В режиме движения и торможения электропривода гребного винта 4 с компенсацией собственной реактивной мощности, генерируемой преобразователем 7 на главные шины 15, система управления 25 через локальный блок управления 40 обратимого преобразователя 7 частоты выдает сигналы задания в контроллеры 32 и 37, которые переводят выпрямитель 29 в режим управляемого выпрямления напряжения, поступающего от главных шин 15 через включенный третий автоматический выключатель 18 и его стабилизации на конденсаторном накопителе 38 звена постоянного тока. Одновременно инвертор 30 переводится в режим формирования трехфазной системы напряжений с амплитудой и частотой, определяемой контроллером 37 инвертора в соответствии с принципом векторного управления электроприводом. Гребной электродвигатель 3 с винтом 4 фиксированного шага приводятся во вращение с заданной системой управления 28 частотой. При этом управляемый выпрямитель 29 на своем силовом входе формирует ШИМ-напряжение, модулированное по синусоидальному закону. Таким образом, на зажимах дросселя 34 ПЧ формируется трехфазная система векторов синусоидальных напряжений с заданным модулем и углом сдвига для каждой фазы, вращающейся синхронно с трехфазной системой векторов напряжений на главных шинах 15.
В выходной цепи управляемого выпрямителя 29, подключенной через датчик 35 тока к конденсаторному накопителю 38, протекает ток под управлением контроллера 32. Датчик напряжения 39 звена постоянного тока передает сигнал обратной связи по напряжению на конденсаторном накопителе 38 для регулирования (стабилизации) контроллером 32 напряжения на заданном уровне. Одновременно во входной цепи управляемого выпрямителя 29 протекают фазные токи, амплитуды и фазы которых определяются векторной суммой напряжений на главных шинах 15 и ШИМ-напряжений, воспроизводимых управляемым выпрямителем 29 на своем силовом входе, и величиной реактивного сопротивления дросселя 34.
Информация о значениях токов через замкнутый третий автоматический выключатель 18, измеряемых третьим датчиком 33 тока фаз в каждой фазе, и линейных напряжениях на главных шинах 15, измеряемых датчиком 31 напряжения фаз, представляется в контроллер 32.
В контроллере 32 по информации, поступающей с датчиков 31, 33, 35 и 39, вычисляются модули и фазовые углы векторов напряжений, которые необходимо воспроизвести на входе управляемого выпрямителя 29, чтобы в результате сложения этих векторов с векторами напряжений на главных шинах 15 между векторами напряжений на этих шинах (главных шинах 15) и векторами токов управляемого выпрямителя 29, измеряемого датчиком 33 тока фаз, был заданный угол сдвига. Для компенсации реактивной мощности на главных шинах 15 этот угол должен быть близким к нулю.
Постоянное напряжение конденсаторного накопителя 38 под управлением контроллера 37, получающего информацию с датчиков 6, 36 и 39, преобразуется инвертором 37 в ШИМ-напряжение для питания трехфазных обмоток статора гребного электродвигателя 3.
Перевод электропривода в режим торможения с компенсацией собственной реактивной мощности производится по сигналу от системы управления верхнего уровня 28. При этом инвертор 30 принимает электроэнергию от гребного электродвигателя 3, перешедшего в генераторный режим, а управляемый выпрямитель 29, работающий по приведенному выше алгоритму, меняет направление тока на 180 электрических градусов, амплитудное значение которого задается с учетом уровня загрузки генератора 8, определяемого с помощью датчика 10 тока фаз. Механическая энергия, поступающая от гребного винта 4, преобразованная гребным электродвигателем 3, через обратимый преобразователь 7 частоты и понижающий преобразователь 17 поступает на шины 16 и может быть использована для питания судовых электропотребителей. В случае отсутствия включенных на шины 16 судовых электропотребителей потребление энергии торможения реализуется традиционным способом - включением тормозных резисторов в звене постоянного тока преобразователя 7 частоты (на Фиг.1 и 2 не показаны).
Работа электропривода, встроенного гребного винта электродвигателя 14 кольцевой конструкции, реализованного на базе преобразователя 11 частоты по схеме на Фиг.2, осуществляется аналогичным образом.
Понижающий преобразователь 17, построенный на базе преобразователя 41 частоты с выходными дросселем 42, фильтром 43, датчиками 44 и 45 токов и напряжений фаз, работает по аналогичному алгоритму, описанному для преобразователя 7 частоты. Отличие его режима состоит в обеспечении стабильных параметров выходного трехфазного напряжения на шинах 16, предназначенного для питания судовых электропотребителей. Так, инвертор 30 преобразователя 41 частоты формирует ШИМ-напряжение, модулированное по синусоидальному закону. На зажимах дросселя 42 формируется трехфазная система векторов синусоидальных напряжений с заданным модулем и углом сдвига для каждой фазы, вращающейся синхронно с трехфазной системой векторов напряжений на шинах 16 питания судовых электропотребителей от подключенных к этим шинам источников электроэнергии (на Фиг.1 не показаны). Инвертор 30 работает под управлением контроллера 37, получающего задания по интерфейсу, через блок 40, от систем управления 25 и 28, и информацию от датчиков 36, 39, 44 и 45. Контроллером 37 вычисляются модули и фазовые углы векторов напряжений, которые необходимо воспроизвести на выходе инвертора 30. В результате сложения этих векторов с векторами напряжений на шинах 16, измеряемых датчиком 45 напряжений фаз, между векторами напряжений на этих шинах и векторами токов инвертора 30, измеряемого датчиком 44 тока фаз, был заданный угол сдвига. Для компенсации реактивной мощности на шинах 16 питания судовых электропотребителей этот угол должен быть близким к нулю.
Режим симметрирования по модулю и фазе векторов трехфазной системы напряжений на шинах 16 осуществляется по сигналам датчика 45, под управлением контроллера 37 и формировании инвертором 30 компенсирующего воздействия. Этот режим может осуществляться по сигналу системы управления 28 верхнего уровня. Инвертор 30 с помощью ШИМ воспроизводит на зажимах дросселя 42 трехфазную систему векторов синусоидальных напряжений с отдельно, для каждой фазы, заданным модулем и углом сдвига, вращающуюся синхронно с трехфазной системой векторов напряжений на шинах 16 судовых электропотребителей. В результате векторы трехфазной системы напряжений на шинах 1 6 выравниваются по модулю с обеспечением взаимного фазового сдвига в 120 электрических градусов.
Коммутацией шестого и седьмого автоматических выключателей 21 и 22 управляет система управления борта 25. После включения автоматического выключателя 21 по информации датчиков 27 и 45 напряжений фаз преобразователем 41 частоты под управлением системы 25 осуществляется синхронизация напряжений фаз на выходе преобразователя 17 с напряжениями фаз на шинах 16. При достижении равенства этих напряжений по частоте, модулю и фазе система 25 включает автоматический выключатель 22 для параллельной работы с источниками питания шин 16. Шины 15 и 16 могут получать электроэнергию и от соответствующих шин другого борта при включении автоматических выключателей 46 и 47. При использовании в качестве генераторов 8 электрических машин с возбуждением от постоянных магнитов параллельная работа таких генераторов не предусматривается.
В аварийных режимах электроприводы пропульсивной установки могут получать электроэнергию от источников питания шин 16 электропотребителей через обратимый преобразователь 41 понижающего преобразователя 17.
Таким образом, расширение функциональных возможностей, применение в структуре нескольких, различающихся по мощности и принципу действия каналов передачи и преобразования энергии различными движителями при оптимальном распределении между каналами комбинированного пропульсивного комплекса участков скоростной характеристики судна, оптимизация рабочих режимов оборудования с целью получения максимального КПД обеспечивает минимальные потери энергии, экономию топлива при повышении надежности электроэнергетической установки. Применение выдвижного электродвигателя-движителя кольцевой конструкции для движения и маневрирования на малых скоростях с использованием электропривода, подкручивающего главный гребной винт для минимизации гидродинамических потерь, позволяет дополнительно снизить потери энергии и обеспечить экономию топлива. Применение обратимых преобразователей частоты с векторным управлением, позволяет обеспечить регулирование частоты вращения в широком диапазоне, повышение КПД и качества электрической энергии в судовой электроэнергетической установке. Применение электрических гребных двигателей и синхронных генераторов с возбуждением от постоянных магнитов, тепловых двигателей с повышенной частотой вращения, в том числе и главного двигателя, приводящего во вращение с повышенной частотой входной вал винторулевой колонки, позволяет обеспечить уменьшение массы и габаритов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2544029C2 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2503580C1 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2013 |
|
RU2535768C1 |
| СУДОВАЯ ПРОПУЛЬСИВНАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2543110C2 |
| СУДОВАЯ ВАЛОГЕНЕРАТОРНАЯ УСТАНОВКА | 2012 |
|
RU2493047C1 |
| СУДОВАЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2012 |
|
RU2521115C2 |
| СУДОВАЯ СИСТЕМА ЭЛЕКТРОДВИЖЕНИЯ С ДВУХВИНТОВЫМ ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНЫМ МОДУЛЕМ С ДВИГАТЕЛЯМИ КОЛЬЦЕВОЙ КОНСТРУКЦИИ | 2012 |
|
RU2522733C1 |
| Электроэнергетическая силовая установка судна (ее варианты) | 1984 |
|
SU1320120A1 |
| Электроэнергетическая установка парома | 1989 |
|
SU1717478A1 |
| Судовая электроэнергетическая установка (ее варианты) | 1983 |
|
SU1180303A1 |
Изобретение относится к судостроению, в частности к судовым электроэнергетическим установкам с комбинированным пропульсивным комплексом. Судовая электроэнергетическая установка имеет в своем составе главный тепловой двигатель, разъединительную муфту, дополнительный тепловой двигатель, соединенный с дополнительным генератором, главные шины, шины питания судовых электропотребителей, систему управления установки, автоматические выключатели, датчики тока и датчики напряжения, первый управляемый и обратимый преобразователь частоты, который имеет управляемые выпрямитель и инвертор, конденсаторный накопитель звена постоянного тока, локальный блок управления, также дополнительный гребной электродвигатель, подсоединенный к гребному винту и второй гребной электродвигатель кольцевой конструкции с встроенным вторым гребным винтом, второй преобразователь частоты, преобразователь напряжения и четыре силовые электрические цепи. Достигается уменьшение массы и габаритов, повышение максимального КПД, минимальность потерь энергии и экономичность топлива, повышение надежности электроэнергетической установки. 2 з.п. ф-лы, 2 ил.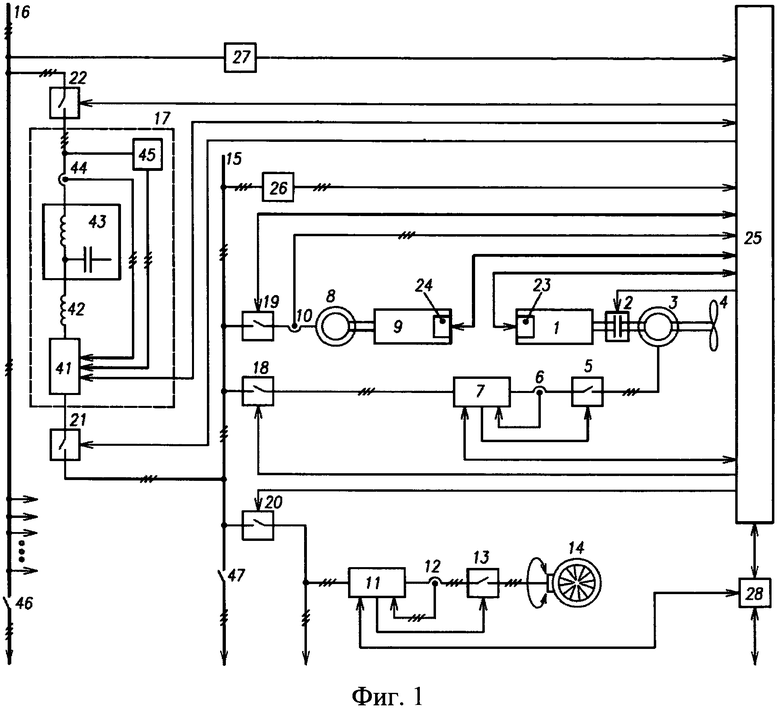
1. Судовая электроэнергетическая установка, имеющая в своем составе главный тепловой двигатель, разъединительную муфту, дополнительный тепловой двигатель, механически соединенный с дополнительным генератором, главные шины, шины питания судовых электропотребителей, систему управления установки, автоматические выключатели, датчики тока и датчики напряжения, а также первый управляемый и обратимый преобразователь частоты, имеющий в своем составе последовательно соединенные управляемые выпрямитель и инвертор, каждый из которых снабжен собственным контроллером, в выходной силовой цепи выпрямителя и входной силовой цепи инвертора установлены датчики тока, каждый из которых связан с соответствующим информационным входом соответствующего контроллера, во входной цепи преобразователя частоты установлены датчик напряжения фаз и датчик тока фаз, который через дроссель преобразователя соединен с силовым входом управляемого выпрямителя, а информационные выходы упомянутых датчиков соединены с соответствующими входами контроллера выпрямителя, в цепи между датчиком тока выходной силовой цепи выпрямителя и датчиком тока входной силовой цепи инвертора установлен конденсаторный накопитель звена постоянного тока, а также датчик постоянного напряжения, подключенный к обоим контроллерам, которые также подсоединены к локальному блоку управления, связанному с системой управления установки, отличающаяся тем, что дополнительно содержит подсоединяемый к гребному винту первый гребной электродвигатель, установленный соосно к главному тепловому двигателю через разъединительную муфту, также дополнительно содержит второй гребной электродвигатель кольцевой конструкции с встроенным вторым гребным винтом, а также второй преобразователь частоты, функциональная схема которого идентична функциональной схеме первого преобразователя частоты, а также содержит понижающий преобразователь напряжения, при этом судовая электроэнергетическая установка имеет в своем составе четыре силовые электрические цепи: первая силовая электрическая цепь содержит последовательно соединенные первый автоматический выключатель, первый датчик тока фаз, первый обратимый управляемый преобразователь частоты, причем первый датчик тока фаз подсоединен информационным выходом к первому информационному входу первого обратимого управляемого преобразователя частоты, управляющий выход которого подключен к управляющему входу первого автоматического выключателя, подключенного к статорным обмоткам первого гребного электродвигателя, вторая силовая электрическая цепь содержит дополнительный генератор и второй датчик тока фаз, третья силовая электрическая цепь содержит последовательно соединенные упомянутый второй гребной электродвигатель, второй автоматический выключатель, третий датчик тока фаз, второй преобразователь частоты, аналогичный первому, управляющий выход которого подключен к управляющему входу второго автоматического выключателя, а первый информационный вход - к информационному выходу третьего датчика тока фаз, четвертая силовая электрическая цепь содержит понижающий преобразователь, при этом первая, вторая, третья и четвертая силовые цепи подсоединены к главным шинам через третий, четвертый, пятый и шестой автоматические выключатели соответственно, управляющие входы которых подсоединены к системе управления установки, к которой также подсоединены второй управляющий вход первого преобразователя частоты, информационный выход второго датчика тока фаз, датчики напряжения фаз, управляющий вход разъединительной муфты, блоки управления главного и дополнительного тепловых двигателей, а второй управляющий вход второго преобразователя частоты подсоединяется к системе управления верхнего уровня, соединенной с системой управления установкой.
2. Судовая электроэнергетическая установка по п.1, отличающаяся тем, что дополнительный генератор, представляет собой синхронный генератор с возбуждением от постоянных магнитов, а понижающий преобразователь выполнен управляемым и имеет в своем составе третий обратимый управляемый преобразователь, функциональная схема которого идентична функциональной схеме первого преобразователя частоты, дроссель, LC фильтр и четвертый датчик тока фаз и датчик выходного напряжения преобразователя напряжения, управляющие входы которых подсоединены к третьему обратимому управляемому преобразователю, третий управляющий вход которого подсоединен к системе управления установки.
3. Судовая электроэнергетическая установка по п.1, отличающаяся тем, что дополнительный генератор представляет собой электромашину с электромагнитным возбуждением, а в качестве понижающего преобразователя применен трансформатор напряжения.
| Мостовой кран с подъемно-поворотной штангой, несущей захватный орган | 1958 |
|
SU119322A1 |
| Механический зажим для соединения двух деталей | 1959 |
|
SU124246A1 |
| US 4661714 A, 28.04.1987 | |||

