Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству стабилизации изображения, которое корректирует размытость изображения (ухудшение изображения), вызванную сотрясением, таким как дрожание рук, и относится к способу управления для такого устройства стабилизации изображения, оптическому устройству и устройству формирования изображения.
Уровень техники
В настоящее время в коммерческом производстве находятся камеры, снабженные устройствами стабилизации изображения, которые предотвращают размытость изображения, вызванную дрожанием рук, и выполнены, например, с модулем компенсации тряски, модулем привода и модулем обнаружения тряски, и в результате уменьшаются вызванные пользователем ошибки съемки.
Тряска камеры, вызванная дрожанием рук пользователя, обычно находится в пределах диапазона частот от 1 до 10 Гц. Чтобы сделать фотографию без размытости, даже если в момент спуска затвора имеет место такое дрожание рук, традиционно предусматривают модуль, который обнаруживает вибрации камеры, вызванные дрожанием рук, и перемещает линзы для корректировки размытости изображения (в дальнейшем в материалах настоящей заявки называемые «корректирующими линзами») согласно обнаруженным значениям.
Чтобы сделать фотографию без размытости, даже если имеют место вибрации камеры, необходимо точно обнаруживать вибрации камеры и корректировать смещения оптической оси, вызванные вибрациями, такими как тряска камеры. В принципе обнаружение вибраций камеры (тряски камеры) возможно посредством встраивания в камеру модуля обнаружения вибраций, который обнаруживает ускорение, угловое ускорение, угловую скорость, угловое смещение или тому подобное и обрабатывает соответствующий выходной сигнал. Затем посредством модуля стабилизации изображения (в частности, корректирующих линз), приводимого в действие модулем привода, модуль стабилизации изображения, оптическая ось которого перемещается на основании вибраций от модуля обнаружения вибраций, выполняется управление размытостью изображения.
В качестве примера, устройство управления стабилизацией, которое обнаруживает вращательную тряску посредством использования датчика угловой скорости и перемещает часть линз или датчика изображения с тем, чтобы снизить вибрации на поверхности датчика изображения, встраивается в различные оптические устройства в качестве эффективной функции корректировки вибраций.
Однако при съемке на близком расстоянии, съемке при высоком коэффициенте увеличения и так далее нельзя игнорировать ухудшение изображения, вызванное тем, что известно как «поступательная тряска» (параллельная тряска), которая действует в поступательном или вертикальном направлении относительно оптической оси камеры и не может быть обнаружена исключительно посредством датчика угловой скорости. Необходимо активно обнаруживать и компенсировать поступательную тряску в случае, например, когда изображение снимается с расстояния примерно 20 см от объекта, как при макросъемке, в случае, когда фокусное расстояние фотографирующей оптической системы очень длинное (например, 400 мм), когда камера находится на расстоянии примерно 1 м от объекта и так далее.
Публикация патента Японии № 7-225405 раскрывает методику, в которой предусмотрен датчик ускорения, который обнаруживает ускорение, поступательная тряска определяется из интеграла второго порядка, полученного датчиком ускорения, и модуль компенсации тряски приводится в действие на основании поступательной тряски и выходного сигнала отдельного датчика угловой скорости.
Однако при съемке движущегося изображения бывают случаи, когда лучше ослабить коррекцию поступательной тряски в зависимости от области в фокусе главного объекта. Примером такого случая является съемка с близкого расстояния: во время съемки с близкого расстояния, поскольку имеются значительные ошибки в величине корректировки из-за разницы в коэффициенте увеличения, если величина коррекции вибраций не настраивается для каждого расстояния до объекта, невозможно выполнить хорошую корректировку вибраций на всем экране. В частности, в случае, когда выполняется значительная корректировка вибраций на главном объекте, расстояние до которого составляет 10 см, его фон (например, расстояние до объекта 1 м) не корректируется значительно, напротив, размытость изображения может стать хуже (перекорректировка). В частности, при съемке движущегося изображения, в отличие от съемки неподвижного изображения, ее влияние постоянно записывается, что может вызвать дискомфорт пользователя.
Сейчас это будет подробно описано более подробно. Как описано выше, существует два типа вибраций, влияющих на устройство формирования изображения: вращательная тряска, при которой устройство формирования изображения поворачивается вокруг центра вращения; и поступательная тряска, при которой все устройство формирования изображения перемещается параллельно. Ухудшение изображения из-за вращательной тряски становится хуже по мере того, как расстояние до объекта и фокусное расстояние устройства формирования изображения увеличиваются. Ухудшение изображения из-за поступательной тряски сильно коррелированно с расстоянием до объекта и фокальным расстоянием (увеличением изображения), и таким образом ухудшение усиливается по мере того, как увеличение изображения становится больше (по мере того, как расстояние до объекта становится короче, а фокусное расстояние становится длиннее). При обычных условиях фотографирования (например, когда расстояние до объекта составляет 1 м) влияние на ухудшение изображения поступательной тряски может быть в значительной степени проигнорировано.
Однако в случае съемки с близкого расстояния (например, когда расстояние до объекта составляет 10 см) из-за того, что коэффициент увеличения высок, влияние на ухудшение изображения поступательной тряски не может быть проигнорировано. В этом случае, например, система оптической стабилизации изображения выполняет обнаружение, используя датчик ускорения, или подобное, а система электронной стабилизации изображения обнаруживает поступательную тряску посредством обнаружения размытости изображения и корректирует вибрации согласно результатам обнаружения.
Однако на экране присутствуют различные объекты на различных расстояниях. Соответственно, когда выполняется корректировка вибраций относительно расстояния до главного объекта, размытость главного объекта из-за поступательной тряски может быть предотвращена. С другой стороны, что касается фона и других объектов на других расстояниях, корректировка вибраций может быть выполнена не значительно, напротив, она может вызвать ухудшение изображения.
Раскрытие изобретения
Настоящее изобретение было создано с учетом вышеописанной ситуации и предназначено для получения изображений с высоким уровнем точности стабилизации посредством выполнения корректировки вибраций для главного объекта и корректировки вибраций для фона в разумном соотношении во время съемки движущегося изображения.
Согласно настоящему изобретению, предложено устройство стабилизации изображения, содержащее модуль корректировки вибраций, который корректирует размытость изображения из-за вибраций; первый модуль обнаружения вибраций, который обнаруживает угловую скорость вибраций; первый модуль расчета, который рассчитывает величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций; второй модуль обнаружения вибраций, который обнаруживает вибрации посредством использования способа, отличного от способа первого модуля обнаружения вибраций; второй модуль расчета, который рассчитывает значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывает величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций; модуль привода, который приводит в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и модуль изменения, который, когда главный объект занимает меньшую часть всего экрана, изменяет величину корректировки поступательной тряски с тем, чтобы быть меньше, чем когда главный объект занимает большую часть.
Кроме того, предложено оптическое устройство, содержащее устройство стабилизации изображения, как описано выше.
Кроме того, предложено устройство формирования изображения, содержащее устройство стабилизации изображения, как описано выше.
Кроме того, предложен способ для устройства стабилизации изображения, включающего модуль корректировки вибраций, который корректирует размытость изображения из-за вибраций, причем способ содержит этапы, на которых обнаруживают угловую скорость вибраций с помощью первого модуля обнаружения вибраций; рассчитывают величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций; обнаруживают вибрации с помощью второго модуля обнаружения вибраций посредством использования способа, отличного от способа первого модуля обнаружения вибраций; рассчитывают значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывают величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций; приводят в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и изменяют, когда главный объект занимает меньшую часть всего экрана, величину корректировки поступательной тряски с тем, чтобы быть меньше, чем когда главный объект занимает большую часть.
Дополнительные признаки настоящего изобретения станут очевидными из нижеследующего описания примерных вариантов осуществления (со ссылкой на сопровождающие чертежи).
Краткое описание чертежей
Сопровождающие чертежи, которые включены в состав и составляют часть описания изобретения, иллюстрируют варианты осуществления изобретения и вместе с описанием служат для разъяснения принципов изобретения.
Фиг. 1 - общая схема, иллюстрирующая функциональную конфигурацию камеры, включающей в себя устройство стабилизации изображения, на виде сверху, согласно варианту осуществления настоящего изобретения;
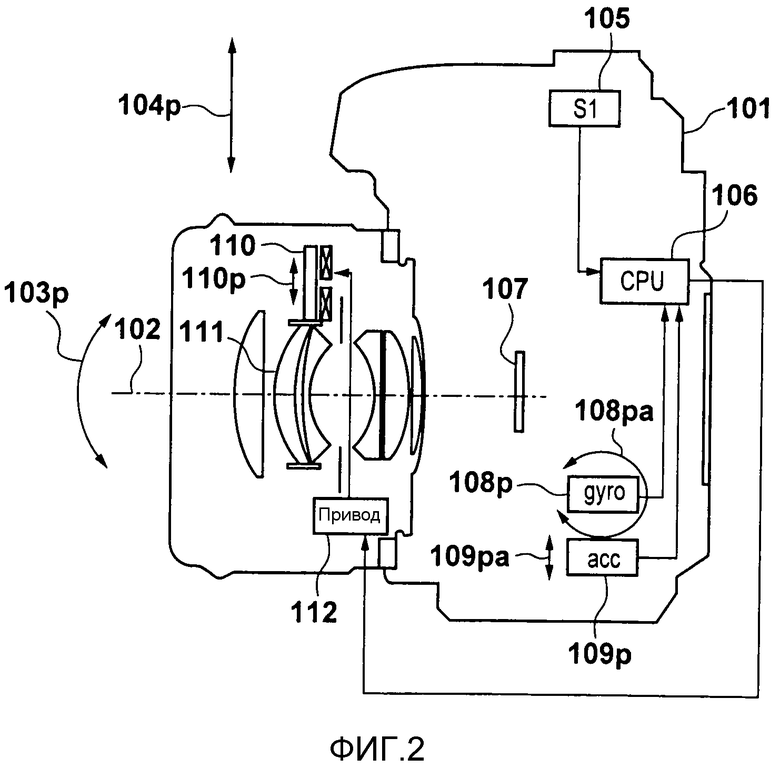
Фиг. 2 - общая схема, иллюстрирующая функциональную конфигурацию камеры, включающей в себя устройство стабилизации изображения, на виде сбоку, согласно варианту осуществления настоящего изобретения;
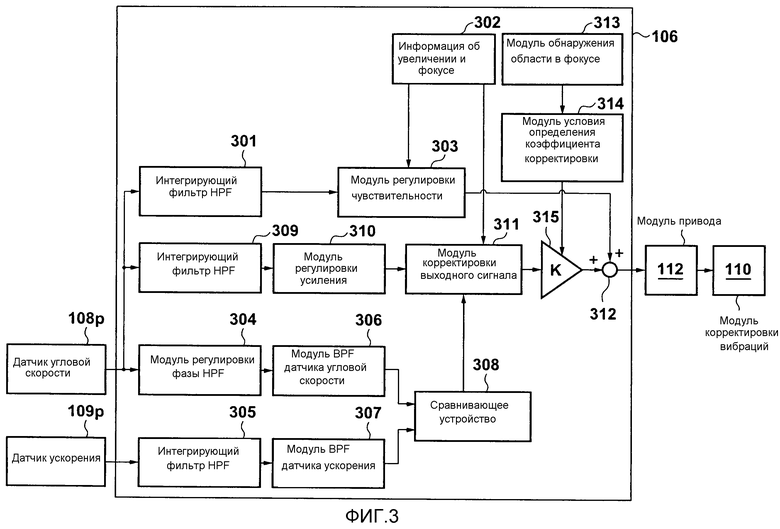
Фиг. 3 - структурная схема, иллюстрирующая конфигурацию устройства стабилизации изображения согласно первому варианту осуществления;
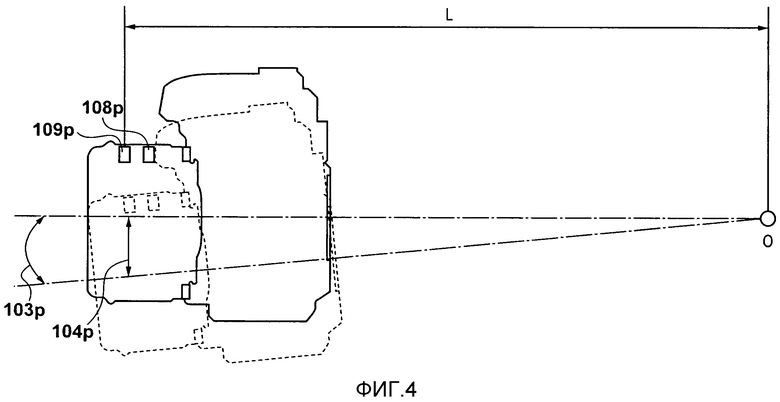
Фиг. 4 - наглядная схема, иллюстрирующая центр вращения тряски согласно первому варианту осуществления;
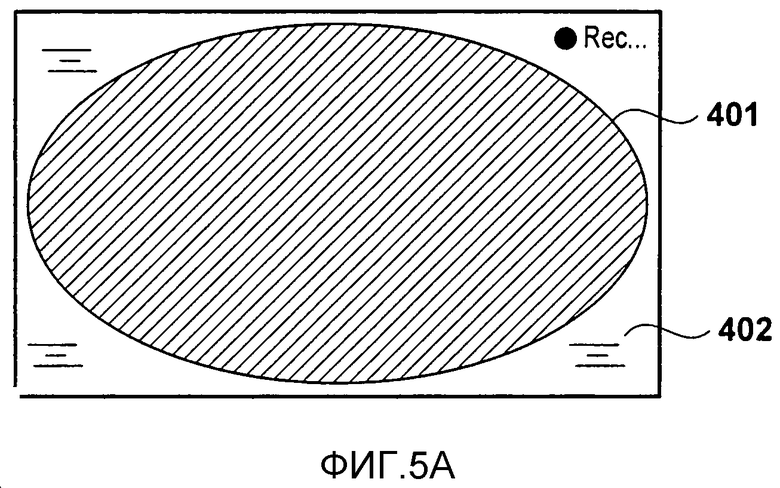
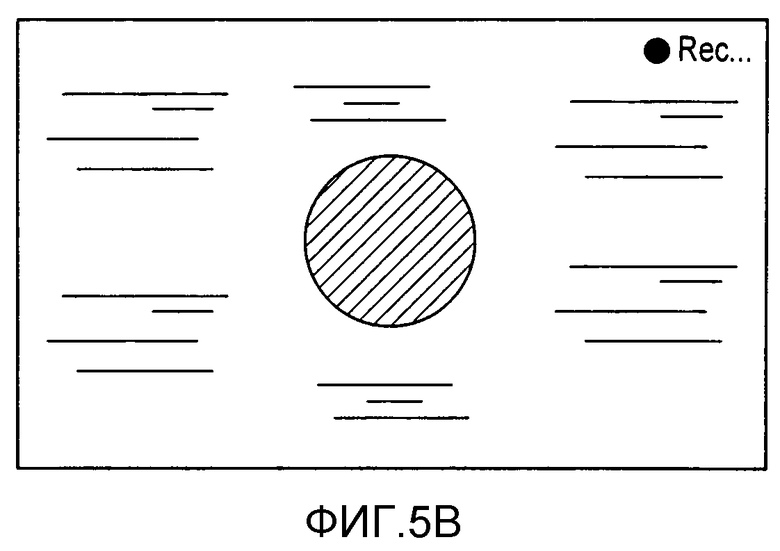
Фиг. 5A и 5B - наглядные схемы, иллюстрирующие влияние корректировки вибраций в случае, когда размеры области в фокусе различаются во время съемки движущегося изображения согласно первому варианту осуществления;
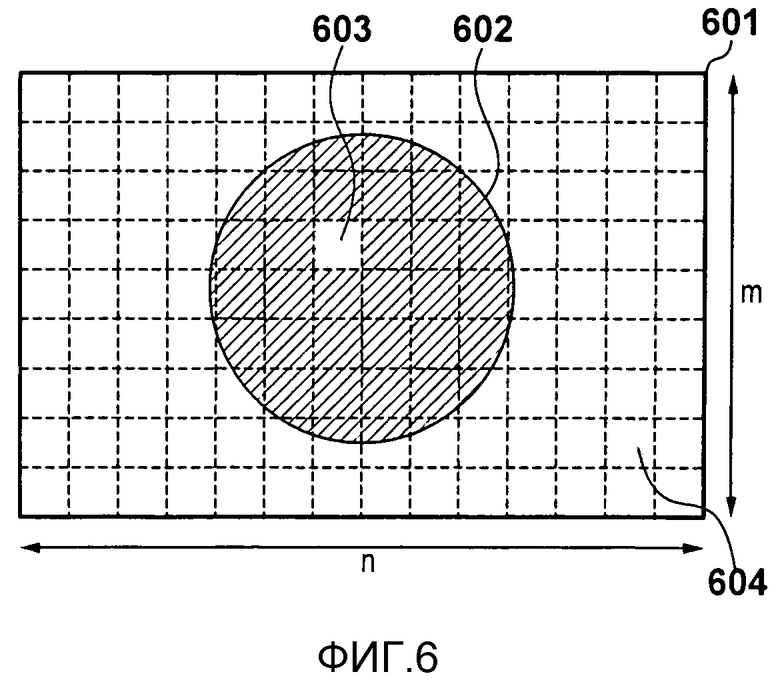
Фиг. 6 - наглядная схема, иллюстрирующая способ определения области в фокусе согласно первому варианту осуществления;
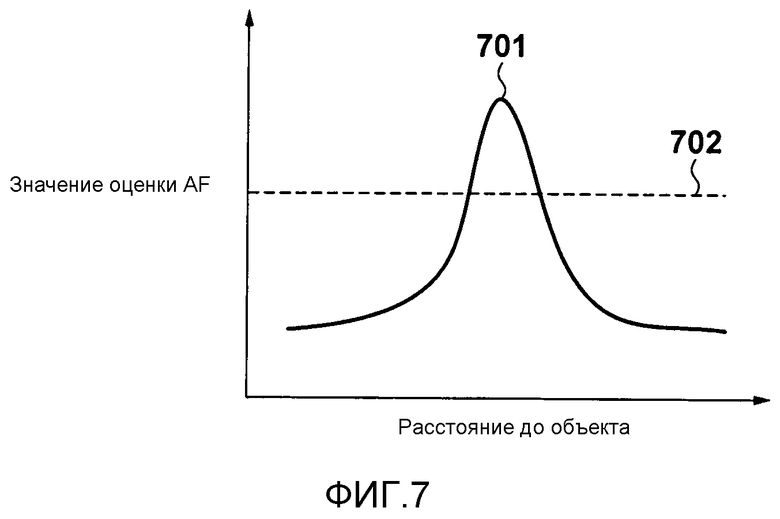
Фиг. 7 - наглядный график, иллюстрирующий способ для определения области в фокусе согласно первому варианту осуществления;
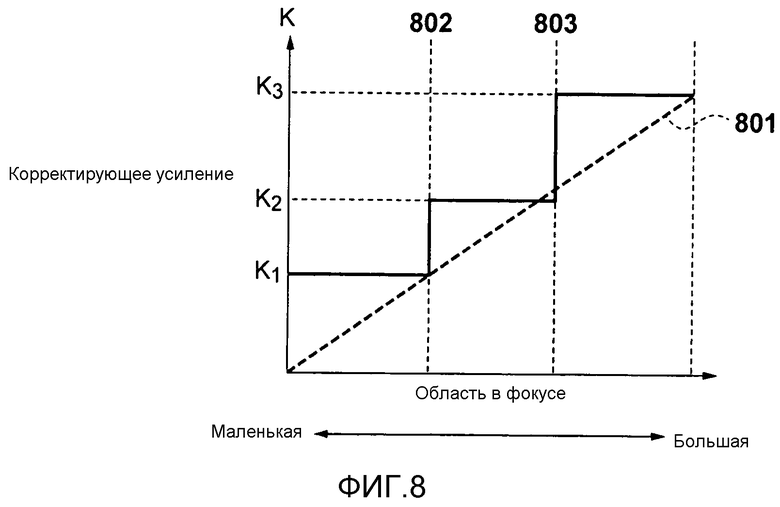
Фиг. 8 - график, показывающий пример связи между пропорцией области в фокусе и корректирующим усилением K согласно первому варианту осуществления;
Фиг. 9A и 9B показывают блок-схемы последовательности операций процедуры обработки управления стабилизацией согласно первому варианту осуществления;
Фиг. 10 - структурная схема, иллюстрирующая конфигурацию устройства управления стабилизацией согласно второму варианту осуществления;
Фиг. 11 - структурная схема, иллюстрирующая конфигурацию устройства управления стабилизацией согласно изменению второго варианта осуществления; и
Фиг. 12 - график, показывающий пример коэффициента корректировки согласно третьему варианту осуществления.
Осуществление изобретения
Примерные варианты осуществления настоящего изобретения будут подробно описаны в соответствии с сопровождающими чертежами. Размеры, формы и относительные положения составляющих частей, показанных в вариантах осуществления, должны изменяться, как удобно, в зависимости от различных условий и конструкции устройства, приспосабливаемого к изобретению, и изобретение не ограничено вариантами осуществления, описанными в материалах настоящей заявки.
<ПЕРВЫЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ>
Фиг. 1 и 2 - общие схемы, иллюстрирующие функциональную конфигурацию камеры 101, включающей в себя устройство стабилизации изображения, согласно первому варианту осуществления настоящего изобретения, в виде сверху и сбоку, соответственно. Система стабилизации, обеспеченная в этой камере 101, компенсирует тряску, обозначенную стрелками 103p и 103y относительно оптической оси 102 (называемую «вращательной тряской» в дальнейшем в материалах настоящей заявки), и тряску, обозначенную стрелками 104p и 104y относительно оптической оси 102 (называемую «поступательной тряской» в дальнейшем в материалах настоящей заявки).
Камера 101 включает в себя спусковой переключатель 105, центральный процессор (CPU) 106 камеры, датчик 107 изображения и датчики 108p и 108y угловой скорости, которые обнаруживают вращательную тряску, обозначенную стрелками 108pa и 108ya, соответственно. Камера 101 дополнительно включает в себя датчики 109p и 109y ускорения, которые обнаруживают поступательную тряску, обозначенную стрелками 109pa и 109ya, соответственно, используя способ, отличный от датчиков 108p и 108y угловой скорости. Камера 101 также включает в себя модуль 110 корректировки вибраций, который легко приводит в движение линзы 111 компенсации тряски вдоль направлений стрелок 110p и 110y, компенсируя таким образом как вращательную тряску, так и поступательную тряску. Отметим, что выходные сигналы датчиков 108p и 108y угловой скорости и датчиков 109p и 109y ускорения вводятся в CPU 106 камеры. Модуль 112 привода затем компенсирует тряску на основании этих выходных сигналов.
Отметим, что в настоящем первом варианте осуществления для компенсации тряски используется то, что известно как «оптическая стабилизация изображения», при которой линзы 111 компенсации тряски перемещаются вдоль плоскости, которая перпендикулярна оптической оси, на основании рассчитанной величины компенсации. Однако способ компенсации тряски не ограничивается оптической стабилизацией изображения, и способ, который выполняет стабилизацию посредством перемещения датчика изображения вдоль плоскости, которая перпендикулярна оптической оси, способ, который использует электронную стабилизацию изображения, которая уменьшает влияние тряски посредством вырезания изображений из каждого выходного сигнала кадра посредством датчика изображения и изменения их положений, или подобные могут использоваться вместо этого. Также возможно использовать эти способы в комбинации друг с другом. Другими словами, любой такой способ может применяться к настоящему изобретению, если он позволяет размытости быть уменьшенной или исключенной из изображений, которые были сняты на основании рассчитанной величины компенсации.
Фиг. 3 - структурная схема, иллюстрирующая конфигурацию устройства стабилизации изображения согласно первому варианту осуществления. Фиг. 3 иллюстрирует только конфигурацию для тряски, которая происходит в вертикальном направлении камеры (то есть в направлении по высоте или направлениях, обозначенных стрелками 103p и 104p на фиг. 2). Однако похожая конфигурация также предусмотрена для тряски, которая происходит в горизонтальном направлении камеры (то есть в направлении поворота вокруг вертикальной оси или направлениях, обозначенных стрелками 103y и 104y на фиг. 1). Так как эти конфигурации в основном одинаковы, на чертежах проиллюстрирована только конфигурация для направления по высоте, и последующие описания будут даны на ее основе.
Сначала процедура для нахождения величины вращательной тряски будет описана, используя фиг. 3. Сигнал угловой скорости вводится в CPU 106 с датчика 108p угловой скорости. Сигнал угловой скорости был введен в интегрирующий фильтр 301 высокой частоты (HPF), и после того как постоянная компонента была обрезана фильтром высокой частоты (HPF), результирующий сигнал интегрируется и преобразуется в угловой сигнал. Здесь, так как полоса частот дрожания рук обычно находится между 1 Гц и 10 Гц, HPF имеет характеристики HPF первого порядка, которые обрезают только компоненты частоты, не превышающие, например, 0,1 Гц, что находится значительно ниже полосы частот дрожания рук.
Выходной сигнал интегрирующего фильтра 301 HPF вводится в модуль 303 регулировки чувствительности. Модуль 303 регулировки чувствительности усиливает выходной сигнал интегрирующего фильтра 301 HPF на основании коэффициента увеличения и фокусного расстояния, определяемого на информации 302 об увеличении и фокусе, что в результате дает целевое значение компенсации вращательной тряски (величину коррекции вращательной тряски). Предусмотрен модуль 303 регулировки чувствительности, так как чувствительность компенсации тряски, которая соответствует отношению величины тряски поверхности изображения камеры к величине перемещения компенсирующих линз 111, изменяется из-за изменения в оптической информации, такой как фокус и увеличение линз.
Далее будет описана процедура нахождения величины поступательной тряски. Сигнал угловой скорости из датчика 108p угловой скорости вводится в вышеупомянутый интегрирующий фильтр 301 HPF и также вводится в интегрирующий фильтр 309 HPF; после того как постоянная компонента была обрезана HPF, результирующий сигнал интегрируется и преобразуется в угловой сигнал. Выходной сигнал интегрирующего фильтра 309 HPF вводится в модуль 310 регулировки усиления. Характеристики усиления и фазы в пределах полосы частот, которая должна подвергнуться компенсации поступательной тряски, регулируются модулем 310 регулировки усиления и интегрирующим фильтром 309 HPF. Выходной сигнал модуля 310 регулировки усиления вводится в модуль 311 корректировки выходного сигнала.
В то же время, как выполняется вышеупомянутая обработка, сигнал угловой скорости из датчика 108p угловой скорости вводится в модуль 304 регулировки фазы HPF (фильтр регулировки фазы HPF), где постоянная компонента, которая накладывается на выходной сигнал датчика 108p угловой скорости, обрезается, и регулировка частоты выполняется на результирующем сигнале. Частота среза, используемая здесь, выравнивается с частотой среза HPF интегрирующего фильтра 305 HPF, упоминаемого позже, и регулируется с тем, чтобы частотные характеристики совпадали. Только компонента частоты предопределенной ширины полосы извлекается из выходного сигнала модуля 304 регулировки фазы HPF модулем 306 фильтра полосы пропускания (BPF) датчика угловой скорости.
Тем временем, выходной сигнал датчика 109p ускорения вводится в интегрирующий фильтр 305 HPF CPU 106, и после того как его постоянная компонента обрезается HPF, результирующий сигнал интегрируется и преобразуется в сигнал скорости. В это время частота среза HPF, как описано выше, устанавливается в соответствии с частотными характеристиками HPF модуля 304 регулировки фазы HPF. Только компонента частоты заданной ширины полосы извлекается из выходного сигнала интегрирующего фильтра 305 HPF модулем 307 фильтра полосы пропускания (BPF) датчика ускорения. Кроме датчика 109p ускорения, вибрации могут быть обнаружены способом, отличным от датчика 108p угловой скорости. В частности, вибрации могут быть обнаружены, например, из скорости из-за внешней силы, прикладываемой к модулю 110 корректировки вибрации, или из выходного сигнала вектора движения.
Выходные сигналы из модуля 306 BPF датчика угловой скорости и модуля 307 BPF датчика ускорения вводятся в сравнивающее устройство 308, где величина корректировки (коэффициент корректировки) для корректировки выходного сигнала модуля 310 регулировки усиления рассчитывается и выводится модулю 311 корректировки выходного сигнала. Способ расчета величины корректировки посредством сравнивающего устройства 308 будет описан ниже.
Модуль 311 корректировки выходного сигнала принимает не только величину корректировки (коэффициент корректировки) из сравнивающего устройства 308, но также информацию 302 об увеличении и фокусе и рассчитывает коэффициент увеличения на основании информации 302 об увеличении и фокусе. Далее, выходной сигнал модуля 310 регулировки усиления корректируется на основании полученного коэффициента увеличения и величины корректировки от сравнивающего устройства 308, и получается целевое значение корректировки поступательной тряски (величина корректировки поступательной тряски).
Модуль 313 обнаружения области в фокусе обнаруживает область в фокусе объекта. После этого модуль 314 условия определения коэффициента корректировки определяет корректирующее усиление K, которое должно быть умножено на величину корректировки поступательной тряски в усилителе 315, в соответствии с областью в фокусе. Определение усиления модулем 313 обнаружения области в фокусе и модулем 314 условия определения коэффициента корректировки будет описано подробно позже.
Затем, в усилителе 315, величина корректировки поступательной тряски, полученная модулем 311 корректировки выходного сигнала, умножается на корректирующее усиление K. Затем, в суммирующем модуле 312, произведение суммируется (объединяется) с величиной коррекции вращательной тряски, и суммарное значение (объединенное значение) выводится модулю 112 привода в качестве финальной величины корректировки. Модуль 110 корректировки вибрации приводится в действие модулем 112 привода на основании суммарного значения, и размытости изображения из-за вращательной тряски и поступательной тряски корректируются.
Далее будут описаны выходной сигнал значения корректировки из сравнивающего устройства 308, величина корректировки вращательной тряски и величина корректировки поступательной тряски.
Фиг. 4 - схема, иллюстрирующая вращательную тряску 103p и поступательную тряску 104p, которые действуют на камеру 101. Здесь, величина тряски поперечной тряски 104p в главной точке оптической системы формирования изображения в съемочных линзах камеры 101 обозначена как Y, в то время как угол тряски вращательной тряски 103p обозначен как θ. Затем определяется центр вращения О, и если радиус вращения, который является расстоянием от центра вращения О до датчика 109p ускорения, обозначен как L, связь между величиной тряски Y, углом тряски θ и радиусом вращения L может быть выражена следующей формулой (1):
Y=Lθ (1)
Отметим, что в формуле (1) величина тряски может быть найдена посредством взятия интеграла второго порядка от выходного сигнала датчика 109p ускорения, а угол тряски θ может быть найден посредством взятия интеграла первого порядка от выходного сигнала датчика 108p угловой скорости. Тем временем, связь между скоростью V, найденной посредством взятия интеграла первого порядка выходного сигнала датчика 109p ускорения, угловой скоростью ω, полученной из выходного сигнала датчика 108p угловой скорости, и радиусом вращения L может быть выражена следующей формулой (2):
V=Lω (2)
Более того, связь между ускорением A, найденным из выходного сигнала датчика 109p ускорения, угловым ускорением ωa, полученным посредством взятия дифференциала первого порядка от выходного сигнала датчика 108p угловой скорости, и радиусом вращения L может быть выражена следующей формулой (3):
A=Lωa (3)
Радиус вращения L может быть найден с помощью любой из вышеупомянутых формул с (1) по (3).
Тем временем, тряска δ, возникающая на поверхности формирования изображения, может быть выражена с помощью следующей формулы (4), используя величину тряски Y поступательной тряски в главной точке оптической системы формирования изображения, угла тряски θ оптической системы формирования изображения и фокусного расстояния f и коэффициента увеличения β оптической системы формирования изображения:
δ=(1+β)fθ+βY (4)
Здесь, фокусное расстояние f, которое является первым членом в правой стороне формулы (4), может быть найдено из информации 302 об увеличении и фокусе оптической системы формирования изображения. Вдобавок, коэффициент увеличения β выражает отношение размера изображения объекта, сформированного на датчике 107 изображения, относительно реального размера объекта, и также может быть найдено из информации 302 об увеличении и фокусе оптической системы формирования изображения. Более того, угол тряски θ может быть найден из результата интегрирования выходного сигнала датчика 108p угловой скорости. Соответственно, значение корректировки вращательной тряски может быть найдено из этой информации, как описано со ссылкой на фиг. 3.
Второй член в правой стороне может быть найден из величины тряски Y поступательной тряски, которая является интегралом второго порядка от выходного сигнала из датчика 109p ускорения, и коэффициента увеличения β, и, следовательно, из этой информации можно найти целевое значение компенсации поступательной тряски.
Однако, в настоящем варианте осуществления, компенсация тряски выполняется на тряске δ, выраженной следующей формулой (5), используя формулы (1) и (4):
δ=(1+β)fθ+βLθ (5)
Другими словами, для поступательной тряски, величина тряски Y, напрямую находимая из датчика 109p ускорения, не используется. Вместо этого, сначала радиус вращения L определяется из формулы (1), формулы (2) или формулы (3), и модуль 311 корректировки выходного сигнала корректирует угол тряски θ, используя радиус вращения L и коэффициент увеличения β, который является результатом интегрирования выходного сигнала датчика 108p угловой скорости и получается из информации 302 об увеличении и фокусе.
Сравнивающее устройство 308 рассчитывает радиус вращения L (величину корректировки) посредством решения формулы (2) для L, что приводит к формуле (6), на основании выходного сигнала модуля 306 BPF датчика угловой скорости и модуля 307 BPF датчика ускорения
L=V/ω (6)
Радиус вращения L может быть рассчитан из соотношения между максимальными значениями пика амплитуды скорости V и угловой скорости ω в пределах предопределенного количества времени (например, установленного на примерно 200 мс в случае, когда частота среза модуля 306 BPF датчика угловой скорости и модуля 307 BPF датчика ускорения составляет 5 Гц). Более того, радиус вращения L (величина корректировки) может обновляться каждый раз, когда рассчитываются скорость V и угловая скорость ω, соответственно. В этот момент радиус вращения, из которого была удалена компонента высокочастотного шума, появляющаяся, когда радиус вращения рассчитывается, может быть рассчитан посредством усреднения скорости V и угловой скорости ω во временной последовательности, обрезая высокочастотную компоненту, используя фильтр низкой частоты (LPF), и так далее.
Далее, фиг. 5A и 5B показывают условия съемки с близкого расстояния при съемке движущегося изображения. Фиг. 5A показывает пример, в котором главный объект 401 большой относительно экрана (всего изображения), или другими словами, область в фокусе большая. Обычно корректировка вибраций должна выполняться как на размытости изображения главного изображения, вызванной тряской камеры, так и на размытости изображения фона, вызванной тряской камеры. Однако величина управления, необходимого для корректировки вибраций на главном объекте 401, и величина управления, необходимого для корректировки вибраций на фоне 402, отличном от главного объекта, различаются. Как можно видеть из формулы (5), причина, по которой величины управления различаются, состоит в том, что величина размытости изображения на поверхности формирования изображения различается в зависимости от коэффициента увеличения объекта. В случае фиг. 5A, главный объект занимает большую часть экрана, и таким образом даже если корректировка вибраций выполняется надлежащим образом на главном объекте 401, размытость изображения фона 402 будет менее заметной.
С другой стороны, как показано на фиг. 5B, в случае, когда главный объект 401 мал относительно экрана, или иными словам, область в фокусе мала, даже если корректировка вибраций выполняется надлежащим образом на главном объекте 401, размытость изображения фона 402 может стать заметной. Например, когда расстояние до объекта, до главного объекта, составляет около 10 см, а расстояние до объекта, до фона, составляет около 1 м, коэффициент увеличения главного объекта очень высок, а коэффициент увеличения фона очень низок. Соответственно, если размытость изображения главного объекта управляется надлежащим образом, фон будет перекорректирован, что приведет к зафиксированному изображению, на котором фон размыт. В этом случае большая разница имеет место особенно в величине поступательной тряски, представленной вторым членом формулы (5). Соответственно, в случае, когда область в фокусе главного объекта 401 мала, как показано на фиг. 5B, посредством уменьшения величины корректировки поступательной тряски получается предпочтительное изображение.
Далее будет описан способ для определения корректирующего усиления K, которое должно быть умножено на величину корректировки поступательной тряски в усилителе 315. Фиг. 6 - наглядная схема, иллюстрирующая способ для определения области в фокусе главного объекта во время записи движущегося изображения посредством модуля 313 определения области в фокусе. Кадр 601 движущегося изображения разделяется на n x m, далее среднее значение контрастной автофокусировки (AF) для каждой разделенной области, полученной в результате деления, и таким образом определяется среднее значение фокусировки. Далее, во всем кадре, разница в среднем значении контрастной AF определяется между разделенной областью 603, имеющей самое высокое среднее значение контрастной AF, и разделенной областью 604, имеющей самое низкое среднее значение контрастной AF, и результирующее значение определяется как пороговое значение для значения оценки AF для обнаружения главного объекта.
Фиг. 7 - наглядный график, иллюстрирующий определение фокусировки на основании значения оценки AF и показывающий связь значения 701 оценки контрастной AF с расстоянием до объекта. Как показано на фиг. 7, в случае, когда имеется объект на конкретном расстоянии до объекта, значение 701 оценки AF высокое. Соответственно, выполняется сравнение между предопределенным пороговым значением 702 и значением 701 оценки AF. Если значение 701 оценки AF больше или равно пороговому значению 702, определяется, что разделенная область находится в фокусе. Если значение 701 оценки AF меньше порогового значения 702, определяется, что разделенная область находится не в фокусе. Эта обработка выполняется для каждой разделенной области, показанной на фиг. 6, а затем рассчитывается пропорция разделенных областей, которые были определены как находящиеся в фокусе, относительно всего экрана.
Фиг. 8 показывает пример связи между пропорцией области в фокусе и корректирующим усилением K. На основании этой связи корректирующее усиление K определяется посредством модуля 314 условия определения коэффициента корректировки. В первом варианте осуществления, пороговые значения 802 и 803 устанавливаются в зависимости от пропорции области в фокусе главного объекта, и определяется каждое корректирующее усиление K, которое должно быть умножено на соответствующие величины корректировки поступательной тряски. В вышеприведенном описании, два пороговых значения устанавливаются, чтобы определить корректирующее усиление K, но может быть установлено больше пороговых значений. В качестве альтернативы, может быть установлено только одно пороговое значение. В области, в которой пропорция области в фокусе главного объекта меньше, чем пороговое значение 802, или другими словами, где область в фокусе главного объекта мала (например, меньше 30%), если корректировка вибраций выполняется на главном объекте, разница в корректировке вибраций между главным объектом и фоном будет заметной. Чтобы решить эту проблему, корректирующее усиление K поступательной тряски устанавливается на значение K1 (например, около 0,3-кратное), которое близко к 0, чтобы уменьшить корректировку поступательной тряски.
В области, в которой пропорция области в фокусе главного объекта не меньше, чем пороговое значение 802, и меньше, чем пороговое значение 803, или иными словами, в случае, когда пропорция области в фокусе главного объекта находится в среднем диапазоне (например, не меньше, чем 30%, и меньше, чем 70%), так как главный объект и фон присутствуют на примерно одинаковой пропорции в кадре, корректирующее усиление K устанавливается, например, на K2, которое является примерно 0,6-кратным.
В случае, когда пропорция области в фокусе главного объекта не меньше, чем пороговое значение 803, так как область в фокусе главного объекта большая (например, не меньше чем 80%), то есть главный объект занимает большую часть экрана, даже если корректировка поступательной тряски активно выполняется на главном объекте, разница в корректировке вибраций между главным объектом и фоном будет незаметной. Соответственно, чтобы активно выполнять корректировку поступательной тряски на главном объекте, корректирующее усиление K устанавливается, например, на K3, которое является примерно 1-кратным.
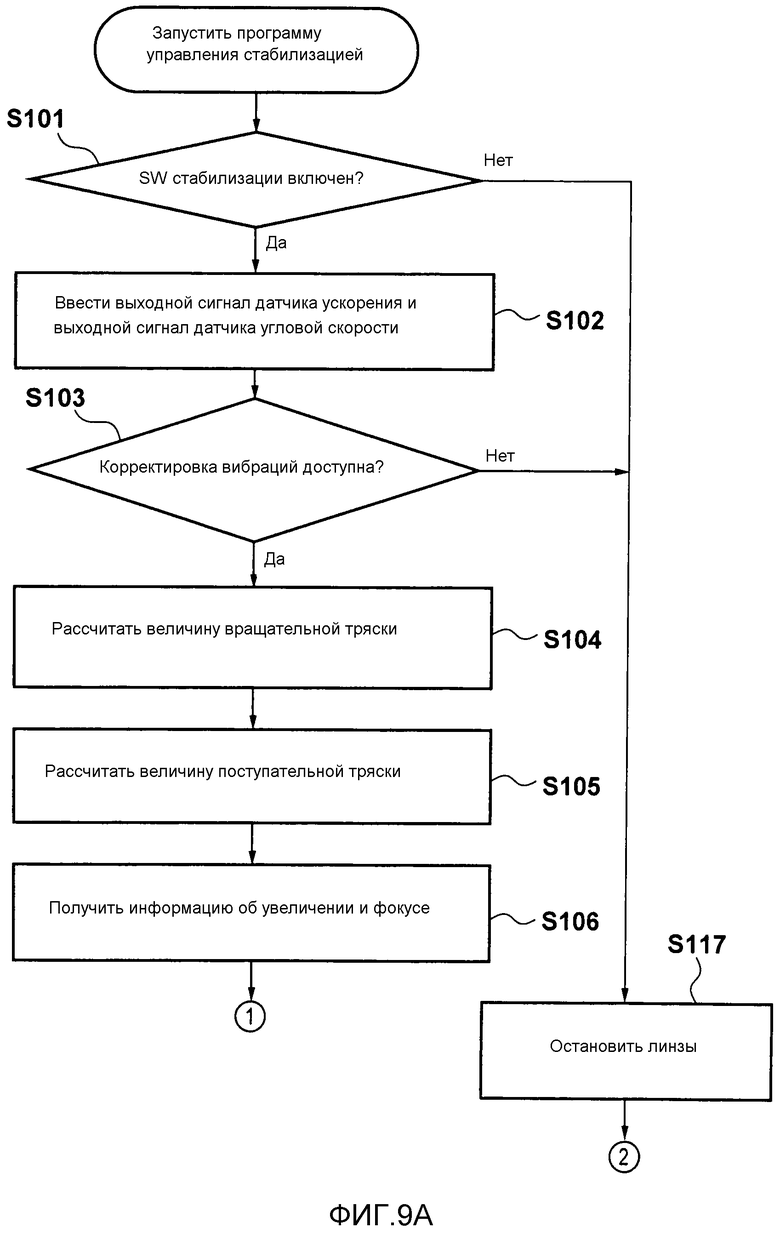
Все функционирование управления стабилизацией согласно первому варианту осуществления будет описано далее со ссылкой блок-схему последовательности операций, показанную на фиг. 9A и 9B. Эта обработка начинается по включении главного питания камеры и выполняется в течение фиксированного периода выборки.
Сначала, на этапе S101, определяется состояние переключателя (SW) стабилизации. Если SW стабилизации включен, процесс переходит к этапу S102. Если, с другой стороны, SW стабилизации выключен, процесс переходит к этапу S117, на котором функционирование линз корректировки вибраций прекращается, и программа управления стабилизацией завершается. Затем, устройство стабилизации изображения ожидает следующего периода выборки. На этапе S102 вводят выходной сигнал датчика 109p ускорения и выходной сигнал датчика 108p угловой скорости.
На этапе S103 определяют, находится ли оно в состоянии доступной корректировки вибраций. Если определяют, что оно находится в состоянии доступной корректировки вибраций, процесс переходит к этапу S104. В противном случае, процесс переходит к этапу S117. Более конкретно, на этапе S103 определяется, был ли запущен источник питания, и стабильны ли выходные сигналы из датчика 109p ускорения и датчика 108p угловой скорости. Пока выходные сигналы не стали стабильными, определяют, что оно не находится в состоянии доступной корректировки вибраций. После того как выходные сигналы становятся стабильными, определяется, что оно находится в состоянии доступной корректировки вибраций. Это предотвращает ухудшение производительности стабилизации, когда значения выходных сигналов нестабильны сразу после запуска источника питания.
На этапе S104 величина вращательной тряски рассчитывается посредством способа, описанного со ссылкой на фиг. 3. На этапе S105 рассчитывается величина поступательной тряски. Далее, на этапе S106, получается информация о положении увеличительных линз и положении фокусирующих линз.
На этапе S107 определяется, снимается ли движущееся изображение. Если определяется, что снимается движущееся изображение, процесс переходит к этапу S108. На этапе S108 получается значение оценки AF. На этапе S109 область в фокусе главного объекта рассчитывается на основании значения оценки AF. На этапе S110 коэффициент корректировки вращательной тряски и коэффициент корректировки поступательной тряски рассчитываются согласно рассчитанной области в фокусе, и процесс переходит к этапу S113. Согласно первому члену в правой стороне формулы (5), коэффициент корректировки вращательной тряски определяется как (l+β)f с помощью фокусного расстояния f и коэффициента увеличения β. Также, согласно второму члену в правой стороне формулы (5), коэффициент корректировки поступательной тряски определяется как βL, с помощью коэффициента увеличения β и радиуса вращения L. Более того, в первом варианте осуществления, как будет описано позже, конечная величина корректировки вибраций получается посредством умножения величины корректировки поступательной тряски на корректирующее усиление K и суммирования произведения с величиной корректировки вращательной тряски. Соответственно, корректирующее усиление K также определяется на этом этапе.
Если, с другой стороны, на этапе S107 определено, что движущееся изображение не снимается, тогда на этапе S111 определяется, что снимается неподвижное изображение. На этапе S112 рассчитывается коэффициент корректировки вращательной тряски и коэффициент корректировки поступательной тряски для съемки неподвижного изображения. На этапе S112 так же, как и на этапе S110, как показано вышеприведенной формулой (5), коэффициент корректировки вращательной тряски определяется с помощью фокусного расстояния f и коэффициента увеличения β, а коэффициент корректировки поступательной тряски определяется как βL с помощью коэффициента увеличения β и радиуса вращения L. В режиме съемки неподвижного изображения, однако, стабилизация для съемки неподвижного изображения выполняется посредством нажатия на SW 2, и таким образом коэффициент увеличения β непосредственно перед съемкой неподвижного изображения используется в качестве коэффициента увеличения β для использования в расчете коэффициента корректировки вращательной тряски и коэффициента корректировки поступательной тряски. Коэффициент увеличения β для управления стабилизацией, рассчитанный для неподвижного изображения, может иметь задержку относительно реального коэффициента увеличения или может устанавливаться на небольшое значение, чтобы предотвратить чрезмерное управление. Однако, при съемке неподвижного изображения, съемка выполняется после завершения операции AF, и таким образом лучше постоянно использовать в качестве коэффициента увеличения β коэффициент увеличения, полученный из информации и положении увеличительных линз и положении фокусирующих линз. Следовательно, после того как SW 2 был нажат, коэффициент увеличения β после завершения операции AF и непосредственно перед съемкой постоянно используется для расчета коэффициента корректировки вращательной тряски и коэффициента корректировки поступательной тряски, посредством чего может выполняться стабилизация, оптимальная для съемки неподвижного изображения.
Далее, на этапе S113, величина корректировки вращательной тряски рассчитывается из коэффициента корректировки вращательной тряски, полученного на этапе S110 или S112 согласно первому члену в правой стороне формулы (5), и процесс переходит к этапу S114. На этапе S114 величина корректировки поступательной тряски рассчитывается из коэффициента корректировки поступательной тряски, полученного на этапе S110 или S112 согласно второму члену в правой стороне формулы (5), и процесс переходит к этапу S115.
На этапе S115 выполняется объединение величин корректировки посредством использования корректирующего усиления K, или иными словами, величина корректировки вращательной тряски и величина корректировки поступательной тряски суммируются. На этапе S116 линза корректировки вибраций приводится в действие на основании определенной величины корректировки вибраций. Программа управления стабилизацией завершается, и устройство стабилизации изображения ожидает следующего периода выборки.
Как описано выше, согласно первому варианту осуществления, во время съемки движущегося изображения корректировка выполняется посредством умножения величины корректировки поступательной тряски на соответствующее усиление согласно области в фокусе главного объекта, посредством чего главный объект и фон могут корректироваться в хорошем балансе.
Вышеизложенное описало пример, в котором корректирующее усиление K устанавливается, используя пороговые значения 802 и 803, на основании пропорции области в фокусе, но настоящее изобретение этим не ограничено, и, как показано графиком 801 фиг. 8, корректирующее усиление K может принимать постоянные значения относительно пропорции области в фокусе.
<ВТОРОЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ>
Далее будет описан второй вариант осуществления настоящего изобретения. Второй вариант осуществления отличается от первого варианта осуществления по следующим пунктам.
В первом варианте осуществления величина корректировки регулируется посредством умножения величины корректировки поступательной тряски на корректирующее усиление K согласно области в фокусе главного объекта. Во втором варианте осуществления, вместо выполнения умножения, используя корректирующее усиление K, после того как была рассчитана величина корректировки поступательной тряски, величина корректировки поступательной тряски регулируется посредством расчета коэффициента увеличения из информации об увеличении и расстоянии до объекта согласно области в фокусе главного объекта и умножения коэффициента увеличения на корректирующее усиление K. Кроме того, в первом варианте осуществления только величина корректировки поступательной тряски умножается на корректирующее усиление, в то время как во втором варианте осуществления величина корректировки вращательной тряски также регулируется посредством умножения коэффициента увеличения для вращательной тряски на корректирующее усиление.
Соответственно, величина вибраций на поверхности формирования изображения, где коэффициент увеличения умножается на корректирующее усиление, определяется формулой (7)
δ=(1+Kaβ)fθ+KbβY (7)
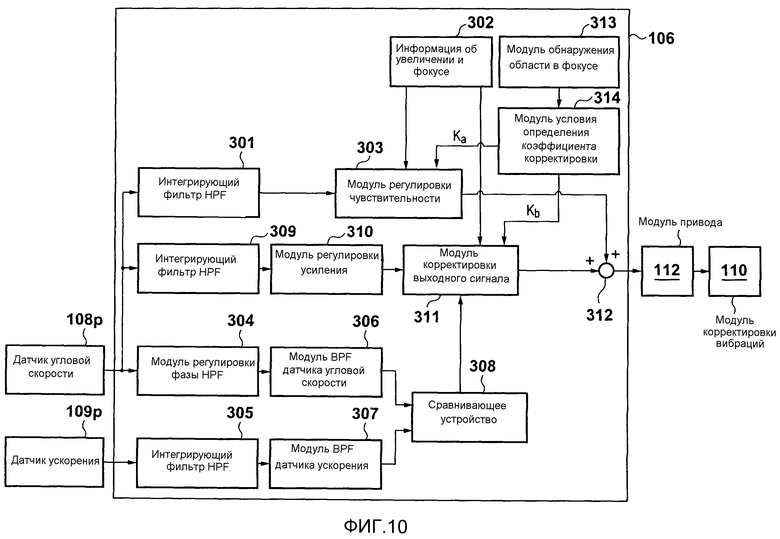
Фиг. 10 показывает систему стабилизации согласно второму варианту осуществления. Область в фокусе главного объекта рассчитывается посредством модуля 313 обнаружения области в фокусе, а корректирующее усиление Ka, которое было установлено модулем 314 условия определения коэффициента корректировки, устанавливается в модуле 303 настройки чувствительности. Кроме того, корректирующее усиление Kb, которое было установлено модулем 314 условия определения коэффициента корректировки, устанавливается в модуле 311 корректировки выходного сигнала.
Корректирующие усиления Ka и Kb могут быть получены таким же образом, как получается корректирующее усиление K, описанное в первом варианте осуществления со ссылкой на фиг. 8. Однако, как и корректирующие усиления K1 и K3, показанные на фиг. 8, Ka и Kb могут устанавливаться на одинаковые значения или могут устанавливаться на разные значения. Как описано выше, согласно второму варианту осуществления величина корректировки вращательной тряски и величина корректировки поступательной тряски могут заменяться посредством умножения коэффициентов увеличения β на корректирующие усиления, и таким образом корректировка вибраций может надлежащим образом выполняться на главном объекте и фоне.
Вышеприведенный второй вариант осуществления был описан, рассматривая пример, в котором коэффициент корректировки вращательной тряски также умножается на корректирующее усиление Ka, но только коэффициент корректировки поступательной тряски может умножаться на корректирующее усиление Kb.
<ИЗМЕНЕНИЕ ВТОРОГО ВАРИАНТА ОСУЩЕСТВЛЕНИЯ>
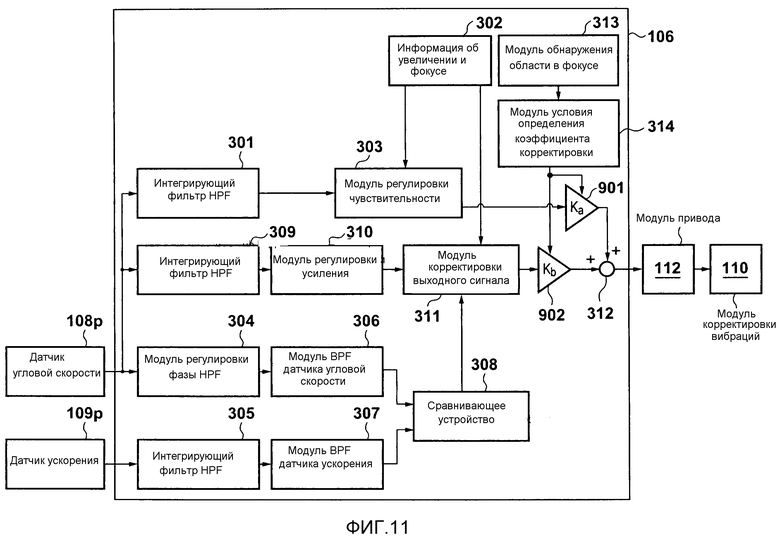
Второй вариант осуществления был описан, рассматривая пример, в котором корректирующие усиления Ka и Kb, которые были установлены посредством модуля 314 условия определения коэффициента корректировки, устанавливаются в модуле 303 регулировки чувствительности и модуле 311 корректировки выходного сигнала. В этом изменении, как показано на фиг. 11, корректирующие усиления Ka и Kb, которые были установлены посредством модуля 314 условия определения коэффициента корректировки, устанавливаются в усилителе 901 корректировки вращательной тряски и усилителе 902 корректировки поступательной тряски. Таким образом, могут быть получены эффекты, подобные таковым во втором варианте осуществления.
<ТРЕТИЙ ВАРИАНТ ОСУЩЕСТВЛЕНИЯ>
Далее будет описан третий вариант осуществления настоящего изобретения. Третий вариант осуществления отличается от первого и второго варианта осуществления по следующим пунктам.
В первом варианте осуществления регулировка выполняется посредством умножения величины корректировки поступательной тряски на корректирующее усиление K согласно области в фокусе главного объекта, а во втором варианте осуществления величина корректировки вращательной тряски и величина корректировки поступательной тряски регулируются посредством установки корректирующих усилений Ka и Kb для коэффициента увеличения согласно области в фокусе главного объекта. В третьем варианте осуществления корректирующее усиление K определяется согласно информации об области в фокусе и коэффициенте увеличения, а не согласно лишь области в фокусе.
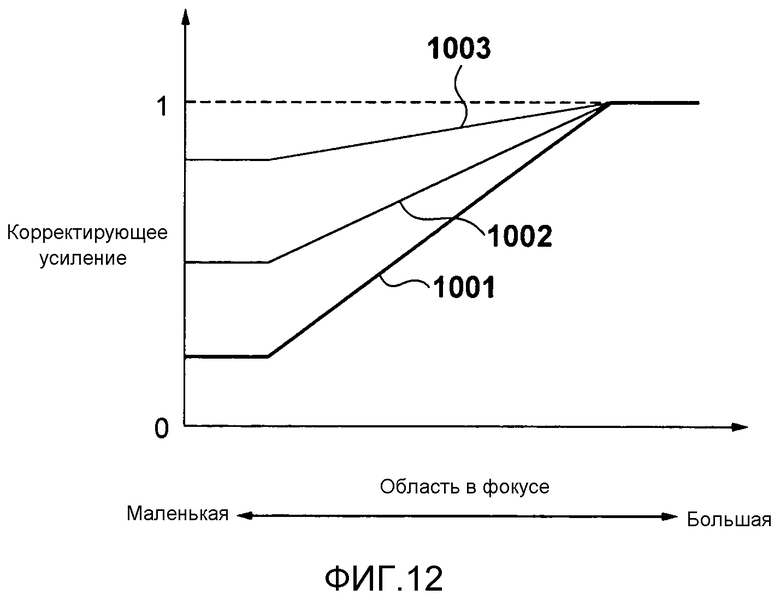
Фиг. 12 - график, показывающий корректирующее усиление согласно области в фокусе и коэффициенту увеличения. Ссылочный номер 1001 обозначает характеристики корректирующего усиления согласно области в фокусе в случае, когда коэффициент увеличения высокий (например, не меньше чем 0,5-кратный), ссылочный номер 1002 обозначает характеристики корректирующего усиления согласно области в фокусе в случае, когда коэффициент увеличения средний (например, 0,1-кратный), ссылочный номер 1003 обозначает характеристики корректирующего усиления согласно области в фокусе в случае, когда коэффициент увеличения низкий (например, не больше чем 0,01-кратный).
Если область в фокусе большая, независимо от значения коэффициента увеличения, корректирующее усиление K может устанавливаться около 1-кратного, и корректировка вибраций может активно выполняться на главном объекте. Это верно потому, что проблем не возникает, даже если корректировка вибраций активно выполняется на главном объекте, так как, когда область в фокусе большая, главный объект занимает большую часть экрана, и таким образом корректировка вибраций надлежащим образом выполняется на главном объекте, размытость изображения фона будет менее заметна. Однако, когда область в фокусе мала, и имеется большая разница в размытости изображения между главным объектом и фоном, если надлежащее управление выполняется на главном объекте, размытость изображения фона будет большой. Другими словами, когда коэффициент увеличения главного объекта высокий, а коэффициент увеличения фона низкий, будет большая разница в размытости изображения между главным объектом и фоном, делая размытость изображения заметной. Напротив, когда коэффициент увеличения главного объекта низкий, а коэффициент увеличения фона тоже низкий, не будет большой разницы в размытости изображения между главным объектом и фоном, делая размытость изображения менее заметной.
Соответственно, когда область в фокусе мала, корректирующее усиление устанавливается меньшим, по мере того как коэффициент увеличения главного объекта становится выше, посредством чего можно предотвратить размытость изображения из-за перекорректировки фона. Также, когда коэффициент увеличения главного объекта низкий, корректирующее усиление устанавливается на значение, которое не так мало, как когда коэффициент увеличения высокий, чтобы управление стабилизацией могло надлежащим образом выполняться на объекте и фоне.
Как описано выше, согласно третьему варианту осуществления, коэффициент увеличения умножается на корректирующее усиление согласно коэффициенту увеличения главного объекта во время съемки движущегося изображения, посредством чего главный объект и фон могут корректироваться в хорошем балансе.
Применения настоящего изобретения не ограничиваются цифровыми однообъективными зеркальными камерами, их сменными объективами и устройствами управления стабилизацией для цифровых компактных камер, и настоящее изобретение также применимо к съемке изображений с помощью цифровых видеокамер, а также к устройствам съемки изображений, встроенным в камеры видеонаблюдения, веб-камеры, мобильные телефоны и подобное.
Варианты осуществления с первого по третий, приведенные выше, описали примеры, в которых величина корректировки поступательной тряски определяется на основании выходных сигналов датчика 108p угловой скорости (108y в случае направления поворота вокруг вертикальной оси) и датчика 109p ускорения (109y в случае направления поворота вокруг вертикальной оси). Однако способ для получения величины корректировки поступательной тряски этим не ограничен, и могут использоваться другие способы, такие как, например, определение только из выходных сигналов датчиков ускорения, определение с помощью скорости из-за внешней силы, прикладываемой к модулю 110 корректировки вибраций, и определение из выходного сигнала вектора движения. В этом случае также, как обсуждалось в вариантах осуществления с первого по третий, усиление, которое должно быть умножено на величину корректировки поступательной тряски, может быть изменено на основании по меньшей мере размера главного объекта относительно всего экрана.
В то время как настоящее изобретение было описано со ссылкой на примерные варианты осуществления, должно быть понятно, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен быть согласован самым широким толкованием с тем, чтобы охватывать все такие модификации, и эквивалентные конструкции, и функции.

Настоящее изобретение относится к устройству стабилизации изображения, которое корректирует размытость изображения (ухудшение изображения), вызванную сотрясением, таким как дрожание рук, и относится к способу управления для такого устройства стабилизации изображения, оптическому устройству и устройству формирования изображения. Заявленная группа изобретений содержит оптическое устройство и устройство формирования изображения, содержащие устройство стабилизации изображения, а также способ управления для устройства стабилизации изображения. При этом устройство стабилизации изображения содержит модуль корректировки вибраций, который корректирует размытость изображения из-за вибраций; первый модуль обнаружения вибраций, который обнаруживает угловую скорость вибраций; первый модуль расчета, который рассчитывает величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций; второй модуль обнаружения вибраций, который обнаруживает вибрации посредством использования способа, отличного от способа первого модуля обнаружения вибраций; второй модуль расчета, который рассчитывает значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывает величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций; модуль привода, который приводит в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и модуль изменения, который, когда главный объект занимает меньшую часть всего экрана, изменяет величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть. Заявленный способ управления для устройства стабилизации изображения содержит этапы, на которых обнаруживают угловую скорость вибраций с помощью первого модуля обнаружения вибраций; рассчитывают величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций; обнаруживают вибрации с помощью второго модуля обнаружения вибраций посредством использования способа, отличного от способа первого модуля обнаружения вибраций; рассчитывают значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывают величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций; приводят в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и изменяют, когда главный объект занимает меньшую часть всего экрана, величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть. Технический результат заключается в получении изображений с высоким уровнем точности стабилизации посредством выполнения корректировки вибраций для главного объекта и корректировки вибраций для фона в разумном соотношении во время съемки движущегося изображения. 4 н. и 8 з.п. ф-лы, 12 ил.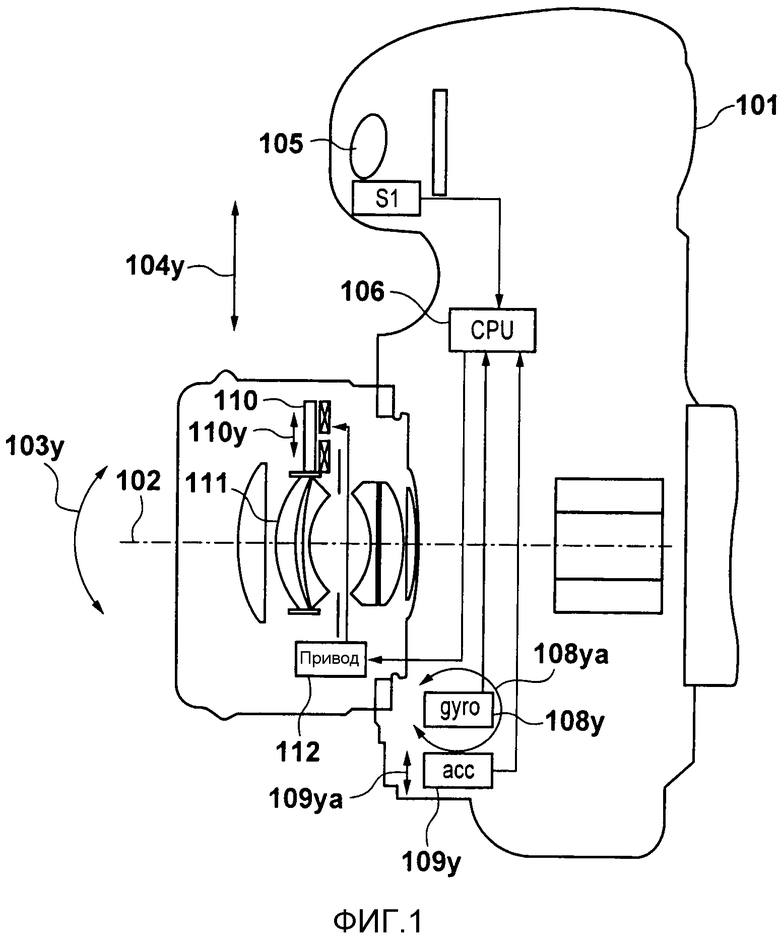
1. Устройство стабилизации изображения, содержащее:
модуль корректировки вибраций, который корректирует размытость изображения из-за вибраций;
первый модуль обнаружения вибраций, который обнаруживает угловую скорость вибраций;
первый модуль расчета, который рассчитывает величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций;
второй модуль обнаружения вибраций, который обнаруживает вибрации посредством использования способа, отличного от способа первого модуля обнаружения вибраций;
второй модуль расчета, который рассчитывает значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывает величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций;
модуль привода, который приводит в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и
модуль изменения, который, когда главный объект занимает меньшую часть всего экрана, изменяет величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть.
2. Устройство стабилизации изображения по п.1, дополнительно содержащее модуль обнаружения фокуса, который определяет главный объект посредством операции фокусировки.
3. Устройство стабилизации изображения по п.1, в котором модуль изменения дополнительно изменяет величину корректировки поступательной тряски согласно коэффициенту увеличения, и когда коэффициент увеличения выше, изменяет величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда коэффициент увеличения ниже.
4. Устройство стабилизации изображения по п.1, дополнительно содержащее второй модуль изменения, который, когда главный объект занимает меньшую часть всего экрана, изменяет величину корректировки вращательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть.
5. Устройство стабилизации изображения по п.4, в котором модуль изменения дополнительно изменяет величину корректировки поступательной тряски согласно коэффициенту увеличения, и когда коэффициент увеличения выше, изменяет величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда коэффициент увеличения ниже.
6. Оптическое устройство, содержащее устройство стабилизации изображения по п.1.
7. Устройство формирования изображения, содержащее устройство стабилизации изображения по п.1.
8. Способ управления для устройства стабилизации изображения, включающего в себя модуль корректировки вибраций, который корректирует размытость изображения из-за вибраций, причем способ содержит этапы, на которых:
обнаруживают угловую скорость вибраций с помощью первого модуля обнаружения вибраций;
рассчитывают величину корректировки вращательной тряски на основании выходного сигнала из первого модуля обнаружения вибраций;
обнаруживают вибрации с помощью второго модуля обнаружения вибраций посредством использования способа, отличного от способа первого модуля обнаружения вибраций;
рассчитывают значение корректировки из выходных сигналов первого модуля обнаружения вибраций и второго модуля обнаружения вибраций и рассчитывают величину корректировки поступательной тряски на основании значения корректировки и выходного сигнала первого модуля обнаружения вибраций;
приводят в действие модуль корректировки вибраций на основании по меньшей мере одной из величины корректировки вращательной тряски и величины корректировки поступательной тряски; и
изменяют, когда главный объект занимает меньшую часть всего экрана, величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть.
9. Способ управления по п.8, дополнительно содержащий этап, на котором определяют главный объект посредством операции фокусировки.
10. Способ управления по п.8, дополнительно содержащий этап, на котором изменяют величину корректировки поступательной тряски согласно коэффициенту увеличения, и когда коэффициент увеличения выше, изменяют величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда коэффициент увеличения ниже.
11. Способ управления по п.8, дополнительно содержащий этап, на котором изменяют, когда главный объект занимает меньшую часть всего экрана, величину корректировки вращательной тряски таким образом, чтобы она была меньше, чем когда главный объект занимает большую часть.
12. Способ управления по п.11, дополнительно содержащий этап, на котором изменяют величину корректировки поступательной тряски согласно коэффициенту увеличения, и когда коэффициент увеличения выше, изменяют величину корректировки поступательной тряски таким образом, чтобы она была меньше, чем когда коэффициент увеличения ниже.
| US 2010014847 A1 21.01.2010 | |||
| US 7424212 B2 09.09.2008 | |||
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| US 6343188 B1 29.01.2002 | |||
| US 5517238 A 14.05.1996 | |||

