УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к методике компенсации дрожания изображения вследствие дрожания рук и т.п., чтобы предотвратить ухудшение изображения.
Описание предшествующего уровня техники
[0002] Чтобы предотвратить дрожание изображения из-за дрожания рук и т.п., выпущены камеры, которые содержат вибрационное устройство, использующее блок компенсации дрожания, возбуждающий блок и блок обнаружения вибрации и т.п., и существует меньше факторов, приводящих к неуспеху фотографа при фотографировании.
[0003] Теперь будет кратко описываться устройство компенсации дрожания. Обнаруживают дрожание камеры вследствие дрожания рук и т.п., и управление перемещением линзы для компенсации дрожания изображения (в дальнейшем называемой "компенсационной линзой") или элементом формирования изображения осуществляется в зависимости от значения обнаружения, так что фотографирование без какого-либо дрожания изображения может быть выполнено, даже когда возникает дрожание рук в операции фотографирования. В этом случае необходимо точно обнаружить вибрацию, чтобы компенсировать изменения на оптической оси вследствие дрожания. В принципе, при обнаружении вибрации блок обнаружения вибрации выполняет процесс вычисления по результатам обнаружения, таким как ускорение, угловое ускорение, угловая скорость, угловое смещение и т.п. Дрожание изображения подавляется путем управления блоком компенсации дрожания на основе результатов этого процесса вычисления, чтобы побуждать компенсационную линзу или элемент формирования изображения к движению.
[0004] Устройство компенсации дрожания, которое обнаруживает вращательное дрожание среди дрожания рук с помощью измерителя угловой скорости для возбуждения компенсационной линзы или элемента формирования изображения для уменьшения дрожания изображения, устанавливается на различные оптические устройства. Однако фотографированию на малом расстоянии (состояние фотографирования с сильным увеличением фотографирования) сопутствуют вибрации, которые нельзя обнаружить с помощью лишь измерителя угловой скорости. То есть имеется так называемое поступательное дрожание, приложенное в горизонтальном или вертикальном направлении в плоскости, перпендикулярной оптической оси камеры, и ухудшение изображения из-за этого также нельзя игнорировать. Например, в случае макрофотосъемки, при которой фотографический объект приближается почти на 20 см, необходимо непосредственно обнаруживать и компенсировать поступательное дрожание. Кроме того, даже при фотографировании фотографического объекта, расположенного на расстоянии около 1 м, необходимо обнаруживать и компенсировать поступательное дрожание при условии, в котором фокусное расстояние оптической системы формирования изображения очень большое (например, 400 мм).
[0005] Выложенный патент Японии № Hei7-225405 раскрывает методику для вычисления поступательного дрожания из интеграла второго порядка ускорения, обнаруженного акселерометром, чтобы возбуждать блок компенсации дрожания, вместе с выводом предоставленного по-другому измерителю угловой скорости. Вывод акселерометра, используемого для обнаружения поступательного дрожания, восприимчив к изменениям окружающей среды, например шумовым помехам, изменению температуры или т.п. Поэтому эти дестабилизирующие факторы дополнительно усиливаются интегрированием второго порядка, и сложно компенсировать поступательное дрожание с высокой точностью.
[0006] Выложенный патент Японии № 2010-25962 раскрывает вычисление поступательного дрожания при допущении, что оно рассматривается как угловое дрожание, когда центр вращения находится в местоположении, удаленном от камеры. В этом способе предоставляются измеритель угловой скорости и акселерометр; вычисляются компенсированное значение и угол с использованием радиуса вращения вращательного дрожания из их выводов для выполнения компенсации дрожания. С помощью вычисления центра вращения исключительно в полосах частот, невосприимчивых к помехам, можно устранить снижение точности из-за дестабилизирующих факторов акселерометра, которые упомянуты выше.
[0007] В предшествующем уровне техники существуют следующие ситуации в компенсации поступательного дрожания.
[0008] В способе, для которого акселерометр используется в качестве средства обнаружения для выполнения компенсации поступательного дрожания, он может привести к увеличению размера и стоимости камеры. Кроме того, хотя и желательно, чтобы позиция крепления акселерометра была позицией главной точки линзы, сложно установить акселерометр вблизи позиции главной точки линзы.
[0009] Кроме того, выложенный патент Японии № 2010-25962 раскрывает средство обнаружения дрожания из вывода средства формирования изображения вместо акселерометра в качестве средства обнаружения дрожания. В случае обнаружения дрожания из вывода средства формирования изображения существует способ вычисления коэффициента компенсации в соответствии с соотношением между дрожанием изображения и вращательным дрожанием непосредственно перед операцией фотографирования, и умножения вращательного дрожания на коэффициент компенсации в операции фотографирования. В этом случае компенсация поступательного дрожания может быть выполнена только в операции фотографирования. Кроме того, при управлении компенсацией дрожания с помощью отсечения электронного изображения коэффициент компенсации вычисляется при фотографировании движущегося изображения в соответствии с соотношением между дрожанием изображения и вращательным дрожанием, и величина поступательного дрожания вычисляется путем умножения вращательного дрожания на коэффициент компенсации. Хотя возможно изменять позицию отсечения изображения, захваченного в элементе формирования изображения, в зависимости от величины поступательного дрожания, существует ситуация, в которой угол зрения становится невыгодно узким в результате отсечения части изображения, и т.п.
[0010] Кроме того, выложенный патент Японии № 2010-25962 также раскрывает средство обнаружения ускорения поступательного дрожания из тока, текущего через катушку возбуждения, вместо акселерометра в качестве средства обнаружения дрожания. Однако в этом средстве управление компенсацией дрожания нельзя выполнить непосредственно перед операцией фотографирования. Если влияние поступательного дрожания значительное, например, при фотографировании макрообласти, то может быть сложно задать детальную композицию и сфокусироваться точно, и компенсацию поступательного дрожания нельзя выполнить при фотографировании движущегося изображения. Кроме того, поскольку характеристики механизма компенсации дрожания не учитываются при оценке ускорения по значениям тока катушки, имеется опасение, что точное оценивание ускорения может быть трудным, и точность оценки может быть невыгодно снижена вследствие использования оцененного ускорения для компенсации дрожания.
[0011] Поэтому цель настоящего изобретения - предоставить устройство компенсации дрожания и устройство захвата изображения, компактные и очень мобильные, и допускающие выполнение очень точной компенсации дрожания изображения по поступательному дрожанию даже в состоянии фотографирования с изменением положения устройств.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0012] Аспектом настоящего изобретения является устройство компенсации дрожания, сконфигурированное для компенсации дрожания с помощью возбуждения элемента компенсации дрожания, причем устройство содержит блок компенсации дрожания, сконфигурированный для компенсации дрожания с помощью перемещения непараллельно оптической оси, возбуждающий блок, сконфигурированный для возбуждения блока компенсации дрожания на основе сигнала указания возбуждения, блок обнаружения позиции, сконфигурированный для обнаружения позиции блока компенсации дрожания, чтобы вывести сигнал обнаружения позиции, и блок вычисления величины компенсации, сконфигурированный для обнаружения составляющей поступательного дрожания в дрожании устройства из перемещения блока компенсации дрожания, так что сигнал указания возбуждения и сигнал обнаружения позиции служат в качестве ввода, и вычисления величины компенсации блока компенсации дрожания из величины дрожания устройства, включающей в себя составляющую поступательного дрожания, чтобы вывести ее в качестве сигнала указания возбуждения.
[0013] В соответствии с настоящим изобретением можно выполнить очень точную компенсацию для поступательного дрожания без добавления датчика для обнаружения поступательного дрожания даже в состоянии фотографирования, которое сопутствует изменению положения компактного и очень мобильного устройства.
[0014] Дополнительные признаки настоящего изобретения станут очевидными из нижеследующего описания примерных вариантов осуществления (со ссылкой на приложенные чертежи).
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] Фиг. 1А - схема, показывающая направления дрожания устройства захвата изображения.
[0016] Фиг. 1В - схема, схематически показывающая элемент формирования изображения, оборудованный устройством компенсации дрожания в соответствии с первым вариантом осуществления настоящего изобретения.
[0017] Фиг. 2 - покомпонентный вид в перспективе, показывающий пример конфигурации для иллюстрации механизма компенсации дрожания вместе с фиг. 3.
[0018] Фиг. 3 - схема, показывающая механизм компенсации дрожания, если смотреть в направлении оптической оси.
[0019] Фиг. 4 - блок-схема, показывающая пример конфигурации блока управления обратной связью механизма компенсации дрожания.
[0020] Фиг. 5А - схема, показывающая вибрации возбуждаемого блока механизма компенсации дрожания с помощью моделирования.
[0021] Фиг. 5В - схема, показывающая модель вибрации с одной степенью свободы.
[0022] Фиг. 6 - блок-схема, показывающая пример конфигурации устройства компенсации дрожания в соответствии с первым вариантом осуществления настоящего изобретения.
[0023] Фиг. 7 - блок-схема, показывающая пример конфигурации устройства оценки на фиг. 6.
[0024] Фиг. 8 - схема, иллюстрирующая центр вращения дрожания, приложенного к устройству захвата изображения.
[0025] Фиг. 9A и 9B - блок-схемы последовательностей операций, иллюстрирующих пример работы устройства компенсации дрожания в соответствии с первым вариантом осуществления настоящего изобретения.
[0026] Фиг. 10 - блок-схема, показывающая пример конфигурации устройства компенсации дрожания в соответствии со вторым вариантом осуществления настоящего изобретения.
[0027] Фиг. 11A и 11B - временные диаграммы, иллюстрирующие вычисление компенсации поступательного дрожания в соответствии со вторым вариантом осуществления настоящего изобретения.
[0028] Фиг. 12 - блок-схема, показывающая пример конфигурации устройства оценки из устройства компенсации дрожания в соответствии с третьим вариантом осуществления настоящего изобретения.
[0029] Фиг. 13A и 13B - схемы, иллюстрирующие процесс блока определения состояния колебания в соответствии с третьим вариантом осуществления настоящего изобретения.
[0030] Фиг. 14 - блок-схема, показывающая пример конфигурации устройства оценки из устройства компенсации дрожания в соответствии с четвертым вариантом осуществления настоящего изобретения.
[0031] Фиг. 15 - блок-схема, показывающая пример конфигурации устройства оценки из устройства компенсации дрожания в соответствии с пятым вариантом осуществления настоящего изобретения.
[0032] Фиг. 16 - блок-схема, показывающая пример конфигурации устройства компенсации дрожания в соответствии с шестым вариантом осуществления настоящего изобретения.
[0033] Фиг. 17 - схема для иллюстрации управления компенсацией дрожания в соответствии с шестым вариантом осуществления настоящего изобретения.
[0034] Фиг. 18 - блок-схема, показывающая пример конфигурации устройства оценки на фиг. 6.
[0035] Фиг. 19A и 19B - схемы, иллюстрирующие определение панорамирования и оценку скорости параллельного движения.
[0036] Фиг. 20A и 20B - блок-схемы последовательностей операций, иллюстрирующих пример работы устройства компенсации дрожания в соответствии с седьмым вариантом осуществления настоящего изобретения.
[0037] Фиг. 21 - блок-схема, показывающая пример конфигурации устройства оценки из устройства компенсации дрожания в соответствии с восьмым вариантом осуществления настоящего изобретения.
[0038] Фиг. 22 - блок-схема, показывающая пример конфигурации устройства оценки из устройства компенсации дрожания в соответствии с девятым вариантом осуществления настоящего изобретения.
[0039] Фиг. 23 - блок-схема, показывающая пример конфигурации устройства оценки для иллюстрации устройства компенсации дрожания в соответствии с десятым вариантом осуществления настоящего изобретения в сочетании с фиг. 24.
[0040] Фиг. 24 - схема, иллюстрирующая оцененную скорость параллельного движения.
ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
[0041] Устройство захвата изображения в соответствии с каждым вариантом осуществления настоящего изобретения описывается ниже в соответствии с приложенными чертежами. Настоящее изобретение может применяться не только к цифровой однолинзовой зеркальной камере и цифровой компакт-камере, но также и к устройству для фотографирования, например цифровой видеокамере, обзорной телевизионной камере, веб-камере или сотовому телефону.
[0042] Фиг. 1А - схема, представляющая направления дрожания устройства 101 захвата изображения. Устройство компенсации дрожания выполняет компенсацию дрожания по дрожанию, вызванному в связи с вращением устройства, центрированным на оси, перпендикулярной оптической оси 102 оптической системы формирования изображения (в дальнейшем называемом "вращательным дрожанием", см. стрелки 103p, 103y). Устройство компенсации дрожания также выполняет компенсацию дрожания при дрожании, вызванном в связи с вращением устройства, центрированным при дрожании, вызванном в связи с поступательным движением устройства в направлении, перпендикулярном оптической оси 102 (в дальнейшем называемом "поступательным дрожанием", см. стрелки 104p, 104y). Кроме того, для трехмерной координаты по осям X, Y, Z, показанным на фиг. 1A, направление оси Z совпадает с оптической осью, а двумя перпендикулярными ей осями являются оси X и Y. Направление вокруг оси X является направлением вращения вокруг горизонтальной оси (см. стрелку 103p), а направление вокруг оси Y является направлением вращения вокруг вертикальной оси (см. стрелку 103y). Направление поступательного дрожания, указанное стрелкой 104y, параллельно оси X, а направление поступательного дрожания, указанное стрелкой 104p, параллельно оси Y.
[0043] [Первый вариант осуществления]
[0044] Ниже описывается первый вариант осуществления настоящего изобретения.
[0045] Фиг. 1B - вид сверху, схематически показывающий устройство 101 захвата изображения, снабженное устройством компенсации дрожания в соответствии с первым вариантом осуществления. Конфигурация блока формирования изображения устройства 101 захвата изображения и функционального блока процесса компенсации дрожания изображения, выполняемого в CPU 106 (Центральный процессор), показаны на фиг. 1B.
[0046] Компенсационная линза блока 111 компенсации дрожания и элемент 107 формирования изображения располагаются на оптической оси 102 оптической системы формирования изображения. Элемент 107 формирования изображения преобразует изображение фотографического объекта, сформированное оптической системой формирования изображения, в изображение. Измеритель 108 угловой скорости является средством обнаружения угловой скорости для обнаружения вращательного дрожания, и сигнал обнаружения угловой скорости выводится в блок вычисления величины компенсации. Блок 106A вычисления величины компенсации вращательного дрожания является первым средством вычисления величины компенсации для вычисления величины компенсации дрожания изображения относительно вращательного дрожания. Кроме того, блок 106B вычисления величины компенсации поступательного дрожания является вторым средством вычисления величины компенсации для вычисления величины компенсации дрожания изображения относительно поступательного дрожания. Вывод этих блоков вычисления величины компенсации передается возбуждающему блоку 110 после сложения. Возбуждающий блок 110 возбуждает компенсационную линзу блока 111 компенсации дрожания и выполняет компенсацию дрожания, принимая во внимание угловое и поступательное дрожание.
[0047] В традиционном устройстве физический датчик, например датчик ускорения, предоставляется для обнаружения поступательного дрожания, указанного стрелками 104p, 104y на фиг. 1А, и сигнал обнаружения отправляется в блок 106B вычисления величины компенсации поступательного дрожания. В отличие от этого в данном варианте осуществления обнаружение поступательного дрожания выполняется с использованием сигнала, выведенного из возбуждающего блока 110 в блок 106B вычисления величины компенсации поступательного дрожания, вместо физического датчика, например датчика ускорения для обнаружения поступательного дрожания. Кроме того, подробности будут описываться ниже.
[0048] В примере, показанном на фиг. 1B, компенсационная линза блока 111 компенсации дрожания перемещается в плоскости, перпендикулярной оптической оси, на основе вычисленной величины компенсации, но также может использоваться способ выполнения компенсации дрожания путем перемещения элемента формирования изображения в плоскости, перпендикулярной оптической оси. Кроме того, существует способ уменьшения влияния дрожания с помощью электронной компенсации дрожания путем изменения позиции отсечения изображения в каждом фотографическом кадре, выведенном элементом формирования изображения, и компенсация дрожания изображения также может выполняться в сочетании с множеством способов компенсации дрожания.
[0049] Далее описывается пример конфигурации блока 111 компенсации дрожания со ссылкой на покомпонентный вид в перспективе на фиг. 2.
[0050] Основание 401 блока 111 компенсации дрожания удерживает вместе механизм затвора и механизм нейтрального светофильтра. Основание 401 снабжается пальцевым штифтом 402 как неотъемлемой частью, а также содержит подвижный пальцевый штифт (не проиллюстрирован). Три криволинейных канавки создаются на цилиндрическом кулачке (не проиллюстрирован) снаружи в радиальном направлении основания 401. Пальцевый штифт 402 вставляется в криволинейную канавку и перемещается вперед и назад по криволинейной канавке в направлении оптической оси, но подробности этого опускаются.
[0051] Группа 406 компенсационных линз целиком удерживается держателем 416 линзы со сдвигом с помощью гвоздя с уплотнением (не проиллюстрирован). Кожух 403 линзы имеет отверстие, которое ограничивает мощность оптического излучения, проходящего через группу 406 компенсационных линз, и отверстие 405 создается на каждой из трех рук 404, предоставленных по сторонам. Выступы 415, предусмотренные в трех местах, создаются на сторонах держателя 416 линзы со сдвигом, и путем посадки этих выступов соответственно в отверстия 405 кожух 403 линзы целиком удерживается с помощью держателя 416 линзы со сдвигом. Магниты 412, 413, которые составляют электромагнитный механизм, удерживаются держателем 416 линзы со сдвигом.
[0052] Держатель 416 линзы со сдвигом с помощью сварки давлением крепится к основанию 401 посредством трех шариков 407. То есть каждый шарик 407 является подвижным поддерживающим элементом по отношению к держателю 416 линзы со сдвигом. Держатель 416 линзы со сдвигом свободно подвижно поддерживается относительно основания 401 в направлении, перпендикулярном оптической оси, с помощью качения каждого шарика 407. В соответствии с этой конфигурацией, поскольку достигается результат возможности получения меньшей амплитуды, большую частоту вибрации можно получить по сравнению с процедурой с использованием направляющей планки, и выгодная компенсация дрожания изображения будет осуществима в цифровой камере, которая содержит все большее и большее количество пикселей.
[0053] Упорная пружина 414 является средством смещения для смещения держателя 416 линзы со сдвигом в направлении ближе к основанию 401. Упорная пружина 414 является пружиной растяжения, которая одной стороной сцепляется с гвоздем с бородкой держателя 416 линзы со сдвигом, а другой стороной сцепляется с гвоздем с бородкой (не проиллюстрирован), созданным на основании 401. Кроме того, радиальные пружины 417, 418 являются средством смещения, предоставленным для предотвращения вращения держателя 416 линзы со сдвигом, и сцепляются с гвоздями с бородкой (не проиллюстрированы), созданными соответственно на держателе 416 линзы со сдвигом и основании 401.
[0054] Катушки 408, 409 удерживаются смолистыми каркасами 410, 411 соответственно. Металлический штекер полностью выполнен на верхушке каркаса, и к нему подключается конец каждой катушки. Путем припаивания проводящего рисунка гибкой печатной платы 424 (в дальнейшем сокращенно "FPC") к этому металлическому штекеру питание подается из схемной части к каждой катушке. Чтобы предоставить питание катушкам 408, 409, катушки 408, 409 электрически соединяются с FPC 424 на площадке 425 посредством металлического штекера. Элементы 422, 423 на эффекте Холла используются в качестве средства обнаружения позиции и располагаются вблизи магнитов 412, 413 соответственно, чтобы обнаруживать изменение магнитного поля в связи с перемещениями магнитов. Величина перемещения держателя 416 линзы со сдвигом вычисляется на основе сигнала магнитного обнаружения. Элементы 422, 423 на эффекте Холла также реализуются в FPC 424, и к ним подводится питание.
[0055] FPC 426 является элементом разводки для предоставления питания возбуждающему блоку затвора и нейтрального светофильтра и крепится к держателю 420 FPC вместе с FPC 424. Держатель FPC 420 снабжается цилиндрическим выступом 421 и крепится после того, как в нем запрессованы отверстия FPC 424 и 426, чтобы выполнить их позиционирование.
[0056] Фиг. 3 - вид спереди блока 111 компенсации со стороны фотографического объекта.
[0057] Выемки 428 являются приемными частями, расположенными в позициях трех шариков 407, расположенных вблизи компенсационной линзы соответственно, то есть на вершинах треугольника. Каждый из шариков 407 принимается в трех выемках 428, созданных на основании 401, и каждый шарик крепится с помощью сварки давлением к держателю 416 линзы со сдвигом посредством точечного контакта. Эта конфигурация дает возможность управления с малым трением, с помощью чего компенсационную линзу побуждают к следованию в целевую позицию с высокой точностью, и может повысить точность оценки поступательного дрожания.
[0058] Далее описывается способ управления компенсационной линзой.
[0059] Фиг. 4 - блок-схема, иллюстрирующая процесс вычисления возбуждающего блока 110.
[0060] Целевая позиция группы 406 компенсационных линз вводится в блок 601 вычитания. Блок 601 вычитания вычитает текущую позицию, указанную сигналом обнаружения позиции, из этой целевой позиции, чтобы вычислить отклонение. Сигнал обнаружения позиции является цифровым сигналом, созданным с помощью аналого-цифрового преобразования выходного значения элемента обнаружения позиции, такого как элемент на эффекте Холла. В этот момент шум наблюдения (см. обозначение дзета) включается в выходное значение элемента на эффекте Холла и т.п., и это подается в блок 605 сложения. Шум наблюдения является составляющей шума, на которую влияет шум, имеющийся у самого датчика, и электрический индукционный шум снаружи и т.п., и составляющая шума наблюдения будет применяться к фактической позиции компенсационной линзы в качестве вывода элемента на эффекте Холла.
[0061] Отклонение, вычисленное блоком 601 вычитания, выводится в контроллер 602 управления с обратной связью (см. C(s) на фиг. 4), и контроллер выполняет управление, чтобы привести это отклонение к нулю, а именно, чтобы обнаруженная датчиком позиция следовала к целевой позиции. Однако после того, как составляющая шума системы (см. обозначение d) применена к выводу контроллера 602 управления с обратной связью в блоке 603 сложения, она выводится в механизм компенсации дрожания, который является установкой 604 (см. P(s) на фиг. 4), и к нему будет применяться возбуждающее усилие. Шум системы преимущественно является возмущающей силой вследствие влияния ускорения свободного падения, вызванного изменением положения устройства захвата изображения, и влияния виброускорения, вызванного дрожанием рук и т.п. Компенсационная линза, которая составляет механизм компенсации дрожания, возбуждается в соответствии с целевой позицией и характеристиками контроллера 602 управления с обратной связью, установки 604, дополнительно подвергаясь влиянию шума системы и шума наблюдения.
[0062] Далее описывается способ обнаружения поступательного дрожания, использующий механизм компенсации дрожания и его возбуждающее средство.
[0063] Сначала для механизма компенсации дрожания выполняется моделирование установки для двух перпендикулярных друг другу осей, как показано на фиг. 5А. Каждая из ортогональных осей A и B представляет ось возбуждения подвижной линзы (компенсационной линзы). Возбуждаемый блок 701 механизма компенсации дрожания обладает инертной массой m и возбуждается по каждой оси с помощью возбуждающего блока. В связи с первым возбуждающим блоком пружинная постоянная представляется в виде ka, коэффициент затухания в виде ca, а усилие в виде fa; в связи со вторым возбуждающим блоком пружинная постоянная представляется в виде kb, коэффициент затухания в виде cb, а усилие в виде fb.
[0064] Фиг. 5B иллюстрирует модель вибрации одной оси из вышеописанных двух осей. То есть это схематическое представление, в котором вибрация моделируется с одной степенью свободы для возбуждаемого блока механизма компенсации дрожания, включающего в себя компенсационную линзу. В отличие от возбуждаемого блока 701 механизма компенсации дрожания крепежный блок 801 относится к части, которая поддерживает возбуждаемый блок (корпус камеры). В этой модели абсолютное смещение возбуждаемого блока 701, включающего в себя компенсационную линзу, обозначается zb, а абсолютное смещение крепежного блока 801 обозначается zw. Кроме того, в связи с возбуждающим блоком пружинная постоянная обозначается k, коэффициент затухания обозначается c, и усилие, вызванное подачей питания на катушку механизма компенсации дрожания, обозначается f. Уравнение движения модели системы для возбуждаемого блока 701 показано следующей формулой (1) (масса m) в нотации Ньютона:

[0065] Относительное смещение между возбуждаемым блоком 701 и крепежным блоком 801 механизма компенсации дрожания является обнаруживаемым с помощью элемента обнаружения позиции (см. элементы 422, 423 на эффекте Холла на фиг. 2). Вслед за этим, чтобы учесть относительное смещение между возбуждаемым блоком 701 и крепежным блоком 801 в качестве наблюдаемого вывода, относительное смещение между ними задается в виде z0 в следующей формуле (2):

[0066] Переменная состояния задается следующим образом:

[0067] Здесь y=z0, u=f, и абсолютная скорость крепежа 801 равна w.

[0068] Следующая формула (3) получается в качестве уравнения состояния с использованием формулы (1) и вышеописанного дефинициального тождества (где t - переменная, которая представляет время):

[0069] Nu в вышеприведенной формуле представляет шум наблюдения. Это белый гауссовский шум, и среднее значение и ковариация w и nu известны. w и nu должны быть представлены следующей формулой (4):

[0070] A-D и G в формуле (3) представляются в виде следующей формулы (5):

[0071] Поэтому с учетом того, что относительное смещение между возбуждаемым блоком 701 и крепежным блоком 801 механизма компенсации дрожания поддается измерению, наблюдатель конфигурируется, как показано в следующей формуле (6) в соответствии с формулой (3):

[0072] Здесь L - коэффициент усиления наблюдателя, который является коэффициентом усиления фильтра Калмана, который получен ранее путем решения уравнения Риккати, показанного в следующей формуле (7):

[0073] Здесь L определяется этим положительно определенным симметричным решением P в виде следующего уравнения (8):

[0074] Используя это средство наблюдения, поддается оценке абсолютная скорость возбуждаемого блока 701 механизма компенсации дрожания (дифференциал первого порядка от zb), которая является переменной состояния, и относительное смещение z0 между возбуждаемым блоком 701 и крепежным блоком 801. Путем выполнения дифференцирования первого порядка над оцененным относительным смещением z0 и вычитания его из абсолютной скорости возбуждаемого блока 701 поддается обнаружению абсолютная скорость крепежного блока 801, то есть корпуса камеры (дифференциал первого порядка от zw). Кроме того, если дифференциал первого порядка оцененного относительного смещения z0 является очень малым значением по отношению к абсолютной скорости возбуждаемого блока 701, то это может напрямую использоваться в качестве абсолютной скорости корпуса камеры для компенсации поступательного дрожания. В этом случае вышеописанное вычитание не нужно, поскольку dzb может считаться равным dzw, потому что dz0 является малым.
[0075] Фиг. 6 - блок-схема, показывающая пример конфигурации устройства компенсации дрожания. В нижеследующем описании конфигурация показана только для дрожания, вызванного в вертикальном направлении (направлении вокруг горизонтальной оси: см. стрелки 103p, 104p на фиг. 1А) у устройства захвата изображения. Хотя аналогичная конфигурация также предоставляется для дрожания, вызванного в горизонтальном направлении (направлении вращения вокруг вертикальной оси: см. стрелки 103y, 104y на фиг. 1А) устройства захвата изображения, и описывается только одна из них, за исключением разницы в направлении, по существу они одинаковы.
[0076] Сначала описывается компенсация вращательного дрожания.
[0077] Сигнал обнаружения угловой скорости от измерителя угловой скорости вводится в CPU 106 и обрабатывается в интегральном фильтре 901 HPF. Сигнал обнаружения угловой скорости преобразуется в угловой сигнал путем отбрасывания составляющей DC (постоянный ток) с помощью HPF (фильтр верхних частот), который составляет интегральный фильтр 901 HPF, а затем его интегрирования. Полоса частот дрожания рук составляет от 1 до 10 Гц. Поэтому характеристики HPF являются характеристиками, которые отбрасывают составляющую с частотой, достаточно удаленной от полосы частот дрожания рук, например, 0,1 Гц или меньше.
[0078] Вывод интегрального фильтра 901 HPF вводится в блок 903 регулировки чувствительности. Блок 903 регулировки чувствительности усиливает вывод интегрального фильтра 901 HPF, чтобы вычислить компенсированное целевое значение вращательного дрожания на основе информации 902 позиции приближения и фокуса и полученного из нее увеличения фотографирования. Это предназначено для компенсации чувствительности компенсации дрожания, меняющейся в плоскости формирования изображения относительно хода компенсации дрожания блока 111 компенсации дрожания, если оптическая информация изменяется из-за регулировки фокуса и операции приближения и т.п. у фотообъектива. Полученное компенсированное целевое значение вращательного дрожания выводится в возбуждающий блок 110 через блок 912 сложения, возбуждается блок 111 компенсации дрожания, и дрожание изображения компенсируется путем управления перемещением компенсационной линзы. Устройство 905 оценки вычисляет скорость параллельного движения (скорость поступательного движения) с помощью вывода от измерителя 108 угловой скорости, вводимого вместе с сигналом указания возбуждения от возбуждающего блока 110, и вывода элемента на эффекте Холла.
[0079] Далее описывается компенсация поступательного дрожания.
[0080] Как описано выше в этом варианте осуществления, скорость параллельного движения (дифференциал первого порядка от zw) обнаруживается наблюдателем с использованием фильтра Калмана. Как описано в формулах с (1) по (8), абсолютная скорость возбуждаемого блока 701 и относительное смещение между возбуждаемым блоком 701 и крепежным блоком 801 оцениваются с учетом относительного смещения между возбуждаемым блоком 701 и крепежным блоком 801 блока 111 компенсации дрожания в качестве переменной состояния и возбуждающего усилия в качестве входной переменной.
[0081] Фиг. 7 - блок-схема управления, показывающая пример конфигурации устройства 905 оценки на фиг. 6.
[0082] Информация об относительном смещении, выведенная элементами на эффекте Холла (см. 422, 423 фиг. 2), и информация об усилии, указанная сигналом указания возбуждения от возбуждающего блока 110 блоку 111 компенсации дрожания, вводятся в фильтр 1001 Калмана. Сигнал указания возбуждения включает в себя информацию, относящуюся к величине возбуждения блока 111 компенсации дрожания, и возбуждающее усилие вычисляется по следующему способу. Чтобы преобразовать управляющий ток, указанный контроллером 602 с обратной связью на фиг. 4, в усилие, блок 1002 преобразования усилия вычисляет возбуждающее усилие путем умножения значения тока на заранее определенный коэффициент. Вывод блока 1002 преобразования усилия вводится в блок 1003 переменного усиления для компенсации температуры. Сигнал обнаружения температуры (сигнал температуры оправы линзы) от датчика температуры (не проиллюстрирован), предусмотренного рядом с блоком 111 компенсации дрожания, вводится в блок 1003 переменного усиления. Коэффициент изменения температуры, зависящий от температуры оправы линзы, заранее сохранен в запоминающем устройстве, и усиление (K) переменно управляется в зависимости от изменения температуры. Поэтому скорость параллельного движения может быть оценена с учетом изменения температуры в выходных характеристиках катушки блока 111 компенсации дрожания из-за изменения температуры оправы линзы. Информация о возбуждающем усилии, выведенная блоком 1003 переменного усиления, и информация об относительном смещении, выведенная элементом на эффекте Холла, вводятся в фильтр 1001 Калмана. Как описано выше, фильтр 1001 Калмана оценивает абсолютную скорость возбуждаемого блока 701 из блока 111 компенсации дрожания и относительное смещение между возбуждаемым блоком 701 и крепежным блоком 801. Дифференцирование первого порядка выполняется над оцененным относительным смещением в дифференцирующем устройстве 1004, чтобы получить относительную скорость, и складывается с оцененной абсолютной скоростью возбуждаемого блока 701 в блоке 1005 сложения. Посредством этого вычисляется оцененная скорость поступательного дрожания (в дальнейшем называемая "оцененной скоростью параллельного движения" или "оцененной скоростью поступательного движения"). Кроме того, хотя вычисление, выполненное в блоке 1005 сложения, фактически является вычитанием, добавление (вычитание) для отрицательного значения также должно расцениваться как аналогичное вычисление для удобства при описании, когда это не нужно выражать явно.
[0083] Возвращаясь к фиг. 6, описывается способ компенсации поступательного дрожания.
[0084] Вывод измерителя 108 угловой скорости вводится в CPU 106 и обрабатывается в интегральном фильтре 909 HPF. После того как HPF, который составляет интегральный фильтр 909 HPF, отбросил составляющую DC сигнала обнаружения угловой скорости, этот сигнал интегрируется и преобразуется в угловой сигнал. Вывод интегрального фильтра 909 HPF вводится в блок 910 регулировки усиления. Блок 910 регулировки усиления содержит фильтр регулировки усиления и регулирует амплитудную и фазовую характеристики в полосе частот, в которой должна быть выполнена компенсация поступательного дрожания, в сочетании с процессом интегрального фильтра 909 HPF. Вывод блока 910 регулировки усиления компенсируется описанным ниже блоком 911 компенсации вывода и рассматривается в качестве компенсированного целевого значения для поступательного дрожания, синтезируется в блоке 912 сложения и добавляется к компенсированному целевому значению ранее описанного вращательного дрожания.
[0085] К тому же параллельно с вышеописанным процессом вывод измерителя 108 угловой скорости вводится в блок 904 регулировки фазы HPF. HPF, который составляет блок 904 регулировки фазы HPF, отбрасывает составляющую DC сигнала обнаружения угловой скорости, а затем выполняется регулировка фазы сигнала. Только составляющая с частотой в заранее определенной полосе извлекается из вывода блока 904 регулировки фазы HPF в блоке 906 BPF (полосовой фильтр) угловой скорости.
[0086] Вывод (оцененная скорость параллельного движения) устройства 905 оценки отправляется в блок 907 BPF скорости параллельного движения, и из него извлекается составляющая с частотой в заранее определенной полосе. Каждый вывод блока 906 BPF угловой скорости и блока 907 BPF скорости параллельного движения вводится в блок 908 сравнения, и вычисляется величина компенсации (коэффициент компенсации), которая компенсирует вывод блока 910 регулировки усиления. Ниже будет описываться вычисление коэффициента компенсации, выполненное блоком 908 сравнения.
[0087] Информация 902 позиции приближения и фокуса также вводится в блок 911 компенсации вывода, и увеличение фотографирования вычисляется из этой информации. Вывод блока 910 регулировки усиления компенсируется на основе полученного увеличения фотографирования и величины компенсации блока 908 сравнения, и вычисляется компенсированное целевое значение поступательного дрожания. Компенсированное целевое значение поступательного дрожания добавляется к компенсированному целевому значению вращательного дрожания в блоке 912 сложения. Результат сложения вводится в возбуждающий блок 110, и тем самым возбуждается блок 111 компенсации дрожания, и дрожание изображения будет компенсировано и для вращательного дрожания и поступательного дрожания.
[0088] Далее описывается величина компенсации, вычисленная блоком 908 сравнения.
[0089] Фиг. 8 показывает вращательное дрожание 103p и поступательное дрожание 104p, приложенные к устройству захвата изображения, которое является схематическим представлением в виде сбоку. Величина поступательного дрожания 104p в позиции главной точки оптической системы формирования изображения устройства 101 захвата изображения записывается как Y. Кроме того, величина вращательного дрожания 103p записывается как тета, радиус вращения записывается как L (см. 1102p), когда задан центр O вращения (см. 1101p). Соотношение между ними представляется следующими формулами (9) и (10):

[0090] Здесь V представляет скорость, а омега представляет угловую скорость. Кроме того, радиус L вращения (см. 1102p) является расстоянием от центра 1101p вращения до блока обнаружения поступательного дрожания (в блоке 111 компенсации дрожания).
[0091] В соответствии с формулой (9) интегрирование первого порядка выполняется над оцененной скоростью параллельного движения (оцененной скоростью поступательного движения), выведенной устройством 905 оценки, чтобы получить смещение Y, и интегрирование первого порядка выполняется над выводом измерителя 108p угловой скорости, чтобы получить угол тета, а радиус L вращения получается из значения их отношения. Кроме того, в соответствии с формулой (10) оцененная скорость параллельного движения, выведенная устройством 905 оценки, расценивается как скорость V, вывод измерителя 108p угловой скорости расценивается как угловая скорость омега, а радиус L вращения получается из значения их соотношения. Радиус L вращения может быть получен тем и другим способом.
[0092] При вычислении радиуса L вращения пиковое значение максимальной амплитуды каждой из скорости V и угловой скорости омега в рамках заранее определенного времени может быть получено для вычисления значения L из их соотношения. Заранее определенное время составляет, например, около 200 мс, если граничная частота блока 906 BPF угловой скорости и блока 907 BPF скорости параллельного движения равна 5 Гц. Более того, обновление радиуса L вращения может выполняться все время, когда вычисляются скорость V и угловая скорость омега соответственно. В этом случае составляющая высокочастотного шума может быть удалена при вычислении радиуса вращения путем выполнения последовательного усреднения над скоростью V и угловой скоростью омега соответственно или отбрасывания высокочастотной составляющей с помощью LPF (фильтр нижних частот).
[0093] Из смещения Y поступательного дрожания в позиции главной точки оптической системы формирования изображения, угла дрожания тета, фокусного расстояния f оптической системы формирования изображения и увеличения фотографирования бета приращение величины дрожания, вызванное на плоскости формирования изображения, получается по следующей формуле (11):

[0094] f и бета в первом члене правой стороны формулы (11) получаются из информации 902 позиции приближения и фокуса, и полученного из нее увеличения фотографирования бета и фокусного расстояния f; а угол дрожания тета получается из результата интегрирования вывода измерителя 108p угловой скорости. Поэтому компенсация вращательного дрожания может быть выполнена, как описано на фиг. 6. Кроме того, второй член правой стороны формулы (11) получается путем выполнения интегрирования первого порядка над оцененной скоростью параллельного движения, выведенной устройством 905 оценки, и увеличением фотографирования бета, полученным из информации 902 позиции приближения и фокуса. Поэтому компенсация поступательного дрожания может быть выполнена, как описано на фиг. 6.
[0095] Однако в этом варианте осуществления компенсация дрожания изображения выполняется над приращением величины дрожания, где формула (11) переписывается в виде следующей формулы (12):

[0096] То есть смещение Y поступательного дрожания, непосредственно полученное с помощью оцененной скорости параллельного движения, выведенной устройством 905 оценки, не используется для поступательного дрожания. Вычисляется радиус L вращения, полученный из формулы (9) или (10), и компенсированное значение вычисляется путем умножения этого значения L, результата интегрирования вывода измерителя 108p угловой скорости (тета) и увеличения фотографирования бета. Величина компенсации (бета, L), которая получается блоком 908 сравнения на фиг. 6 с использованием вычисления коэффициента компенсации и выводится в блок 911 компенсации вывода, является коэффициентом компенсации по отношению к тета.
[0097] Далее вся работа по управлению компенсацией дрожания описывается со ссылкой на фиг. 9A и 9B. Блок-схема последовательности операций, показанная на фиг. 9A, начинается с операции включения главного источника питания устройства захвата изображения и выполняется в соответствии с программой, интерпретируемой и выполняемой посредством CPU 106 в каждом фиксированном периоде дискретизации.
[0098] Сначала на этапе S1201 определяется, переключен ли пользователем переключатель компенсации дрожания (SW, не проиллюстрирован). Процесс переходит к этапу S1202, если SW компенсации дрожания находится во включенном состоянии, и переходит к этапу S1219, если он находится в выключенном состоянии. На этапе S1202 CPU 106 принимает сигнал обнаружения от измерителя 108 угловой скорости. На следующем этапе S1203 CPU 106 определяет, находится ли он в состоянии, в котором возможна компенсация дрожания; процесс переходит к этапу S1204, если он находится в состоянии, в котором компенсация дрожания возможна, и переходит к этапу S1219, если он не находится в состоянии, в котором возможна компенсация дрожания. На этапе S1203 определяется, что он не находится в состоянии, в котором возможна компенсация дрожания, с момента электроснабжения от источника питания до того, как станет стабильным вывод измерителя 108 угловой скорости. Определяется, что он находится в состоянии, в котором компенсация дрожания возможна, после того как вывод измерителя 108 угловой скорости стал стабильным. Посредством этого сокращение эффективности компенсации дрожания может быть предотвращено в состоянии, в котором вывод сразу после подключения источника питания является нестабильным.
[0099] На этапе S1204 вычисляется угол с помощью способа, описанного с использованием фиг. 6. Этот угол является выходным значением интегрального фильтра 901 HPF на фиг. 6. Далее на этапе S1205 устройство 905 оценки вычисляет оцененную скорость параллельного движения с помощью вышеописанного способа. Далее блок 908 сравнения вычисляет радиус вращения для фотографирования движущегося изображения на этапе S1206 и вычисляет радиус вращения для фотографирования неподвижного изображения на этапе S1207. В этот момент причинами, по которым вычисляются отдельно вращательные радиусы, используемые при фотографировании неподвижного изображения и фотографировании движущегося изображения, являются следующие. Во-первых, выполняя компенсацию поступательного дрожания также при фотографировании движущегося изображения, компенсационная линза невыгодно достигает границы диапазона перемещения (граница управления), если воздействие дрожания, приложенное к плоскости формирования изображения поступательного дрожания, очень большое, например, в макрообласти и т.п. Причина в том, что поскольку диапазон компенсации ограничивается, компенсационная линза невыгодно стремится к границе управления, если величина дрожания большая. Поэтому управление поступательным дрожанием устанавливается на меньший уровень при фотографировании движущегося изображения. По этой причине устанавливается ограничение на радиус вращения для фотографирования движущегося изображения путем изменения установки максимального значения радиуса вращения и т.п., чтобы он был меньше радиуса вращения для фотографирования неподвижного изображения.
[0100] Далее на этапе S1208 величина компенсации вращательного дрожания вычисляется на основе информации об угле, полученной на этапе S1204, информации 902 позиции приближения и фокуса и полученного из нее увеличения фотографирования. Затем на этапе S1209 CPU 106 определяет, является ли текущий режим режимом фотографирования движущегося изображения или режимом фотографирования неподвижного изображения; процесс переходит к этапу S1210, если это режим фотографирования движущегося изображения, и процесс переходит к этапу S1211, если это режим фотографирования неподвижного изображения. На этапе S1210 величина компенсации поступательного дрожания для фотографирования движущегося изображения вычисляется с использованием радиуса вращения для фотографирования движущегося изображения. Этап S1211 является процессом определения операционного состояния кнопки 105 спуска (см. фиг. 1). Кнопка 105 спуска снабжается двухфазными переключателями; полунажатие кнопки 105 спуска переводит первый переключатель (в дальнейшем называемый "SW1") во включенное состояние, а полное нажатие на кнопку 105 спуска приводит второй переключатель (в дальнейшем называемый "SW2") во включенное состояние. CPU 106 проверяет, находится ли SW2 во включенном или выключенном состоянии; процесс переходит к этапу S1212, если SW2 находится во включенном состоянии, и процесс переходит к этапу S1213, если SW2 находится в выключенном состоянии.
[0101] На этапе S1212 величина компенсации поступательного дрожания для фотографирования неподвижного изображения вычисляется с использованием радиуса вращения для фотографирования неподвижного изображения. На этапе S1213 CPU 106 проверяет состояние SW1; процесс переходит к этапу S1214, если SW1 находится во включенном состоянии, и процесс переходит к этапу S1216, если SW1 находится в выключенном состоянии. На этапе S1214 CPU 106 определяет, завершается ли операция AF (автоматическая фокусировка). Процесс переходит к этапу S1215, если операция AF завершается, и процесс переходит к этапу S1216, если операция AF не завершается.
[0102] На этапе S1215 величина компенсации поступательного дрожания для фотографирования движущегося изображения вычисляется с использованием радиуса вращения для фотографирования движущегося изображения. Кроме того, на этапе S1216 величина компенсации поступательного дрожания устанавливается в ноль. После этапов S1210, S1212, S1215, S1216 на этапе S1217 блок 912 сложения (см. фиг. 6) складывает величину компенсации вращательного дрожания и величину компенсации поступательного дрожания. На этапе S1218 возбуждающий блок 110 выводит управляющий сигнал в блок 111 компенсации дрожания на основе вычисленной величины компенсации дрожания, и компенсационная линза возбуждается. Между тем на этапе S1219 прекращается возбуждение компенсационной линзы. После этапов S1218, S1219 подпрограмма для компенсации дрожания завершается, и процесс ожидания работает до следующего момента дискретизации.
[0103] Как указано выше, в первом варианте осуществления абсолютная скорость возбуждаемого блока и относительное смещение между возбуждаемым блоком и крепежным блоком оцениваются с использованием наблюдателя, где относительное смещение между возбуждаемым блоком и крепежным блоком механизма компенсации дрожания служит в качестве переменной состояния, а возбуждающее усилие для блока компенсации дрожания служит в качестве входной переменной. Затем оцененная скорость параллельного движения вычисляется для получения величины компенсации поступательного дрожания. Как описано выше, отсутствует необходимость в предоставлении акселерометра и т.п., поскольку может использоваться механизм компенсации дрожания и его возбуждающее средство. Поэтому можно осуществить уменьшение размеров и снижение себестоимости, и компенсация вращательного дрожания и компенсация поступательного дрожания могут выполняться одновременно, без добавления компонента.
[0104] В традиционной конфигурации, в которой датчик ускорения используется для обнаружения поступательного дрожания, необходимо устройство для позиции крепления датчика ускорения. Изначально ускорение, которое должно быть обнаружено для компенсации поступательного дрожания, является ускорением в позиции главной точки линзы. Однако датчик ускорения должен быть прикреплен к месту, удаленному от позиции главной точки линзы и центра оптической оси (подложка управления в корпусе камеры, и т.д.), если нет достаточного пространства вокруг фотообъектива и прикрепление датчика ускорения сложно. По этой причине имеется опасение, что точность обнаружения сигнала обнаружения ускорения и величины поступательного дрожания будет снижаться. В отличие от этого в этом варианте осуществления, поскольку величина поступательного дрожания может быть вычислена для части механизма компенсации дрожания, величина поступательного дрожания вычисляется около позиции главной точки линзы и центра оптической оси, и точность компенсации поступательного дрожания может быть повышена.
[0105] Кроме того, в этом варианте осуществления описано перемещение компенсационной линзы в качестве средства компенсации дрожания в плоскости, перпендикулярной оптической оси, то есть то, что называется "оптической компенсацией дрожания". Однако может быть использована не только оптическая компенсация дрожания, но также и следующие конфигурации:
- конфигурация, в которой компенсация дрожания выполняется путем перемещения элемента формирования изображения в плоскости, перпендикулярной оптической оси;
- конфигурация с помощью электронной компенсации дрожания, которая уменьшает влияние дрожания путем изменения позиции отсечения изображения каждого фотографического кадра, выведенного элементом формирования изображения; и
- конфигурация, в которой компенсация дрожания выполняется путем объединения множества средств управления компенсацией дрожания.
[0106] Кроме того, каждый тип конфигурации также возможен для оценки поступательного дрожания. Например, в случае использования механизма компенсации дрожания, который выполняет компенсацию дрожания путем перемещения элемента формирования изображения в плоскости, перпендикулярной оптической оси, оцененная скорость параллельного движения может быть вычислена наблюдателем, если может быть осуществлено наблюдение относительного смещения между возбуждаемым блоком и крепежным блоком механизма компенсации дрожания. То есть абсолютная скорость корпуса камеры является обнаруживаемой с помощью способа, аналогичного вышеупомянутому, если наблюдатель конфигурируется так, что относительное смещение между возбуждаемым блоком и крепежным блоком механизма компенсации дрожания служит в качестве переменной состояния, а возбуждающее усилие для блока компенсации дрожания служит в качестве входной переменной.
[0107] [Второй вариант осуществления]
[0108] Далее описывается второй вариант осуществления настоящего изобретения.
[0109] Фиг. 10 показывает пример конфигурации устройства компенсации дрожания в соответствии со вторым вариантом осуществления. Кроме того, пропускается подробное описание компонентов, которые являются такими же, как в первом варианте осуществления, используя уже использованные символы, и преимущественно описывается отличие между первым вариантом осуществления и вторым вариантом осуществления. То же самое применяется к другим вариантам осуществления, описанным ниже.
[0110] Во втором варианте осуществления компенсация поступательного дрожания выполняется на основе сигнала параллельного смещения, полученного путем интегрирования оцененной скорости параллельного движения, вычисленной устройством 905 оценки. К тому же включение/выключение компенсации поступательного дрожания устанавливается в зависимости от состояния второго переключателя SW2, и по сигналу обнаружения измерителя 108 угловой скорости определяется, возникло ли заранее определенное или большее изменение постурального положения как раз перед операцией SW2, и включение/выключение компенсации поступательного дрожания устанавливается во время операции фотографирования.
[0111] Поэтому отличиями между фиг. 6 и 10 являются следующие:
(1) обращаются к оперативной информации 1301 SW2;
(2) отсутствует интегральный фильтр 909 HPF, блок 910 регулировки усиления, блок 911 компенсации вывода, блок 904 регулировки фазы HPF, блок 906 BPF угловой скорости, блок 907 BPF скорости параллельного движения, блок 908 сравнения, показанные на фиг. 6; и интегральный фильтр 1302 HPF и блок 1303 регулировки чувствительности предоставляются для вычисления величины компенсации поступательного дрожания;
(3) предоставляется блок 1304 переключения сигнала по оперативной информации 1301 SW2; и
(4) предоставляются блок 1305 определения изменения положения и блок 1306 переключения сигнала по его выводу.
[0112] Поскольку компенсация вращательного дрожания аналогична таковой в первом варианте осуществления, ниже описывается компенсация поступательного дрожания.
[0113] Оцененная скорость параллельного движения из устройства 905 оценки вводится в интегральный фильтр 1302 HPF. HPF, который составляет интегральный фильтр 1302 HPF, отбрасывает составляющую DC входного сигнала, и этот сигнал преобразуется в сигнал параллельного смещения путем интегрирования и вводится в блок 1303 регулировки чувствительности. Блок 1303 регулировки чувствительности усиливает вывод интегрального фильтра 1302 HPF для вычисления компенсированного целевого значения вращательного дрожания на основе увеличения фотографирования, полученного из информации 902 позиции приближения и фокуса.
[0114] Оперативная информация 1301 SW2 отправляется в блок 1304 переключения сигнала. Блок 1304 переключения сигнала выбирает ноль или вывод блока 1303 регулировки чувствительности и выводит результат в последующий блок 1306 переключения сигнала, со ссылкой на оперативную информацию 1301. То есть если SW2 находится во включенном состоянии, то выбирается вывод блока 1303 регулировки чувствительности, и блок 1304 переключения сигнала выводит величину поступательного дрожания. К тому же, если SW2 находится в выключенном состоянии, то блок 1304 переключения сигнала выбирает ноль, и никакой компенсации поступательного дрожания не выполняется. Причина в том, что поскольку на оцененную устройством 905 оценки скорость параллельного движения может значительно влиять ускорение свободного падения, вызванное в связи с изменением положения устройства захвата изображения, ошибочные оценки скорости параллельного движения неблагоприятно возникают из-за влияния ускорения свободного падения, если изменение положения значительное. Во многих случаях, поскольку фотограф не совершает большого изменения положения в операции SW2, подходящее вычисление величины поступательного дрожания возможно во включенном состоянии SW2, и выполняется компенсация поступательного дрожания.
[0115] Хотя блок 1305 определения изменения положения определяет изменение положения устройства захвата изображения с использованием углового сигнала, который является выводом интегрального фильтра 901 HPF, он вычисляет величину изменения углового сигнала в заранее определенное время при каждой контрольной выборке. К тому же оперативная информация 1301 SW2 также вводится в блок 1305 определения изменения положения; пока SW2 находится во включенном состоянии, информация определения положения удерживается непосредственно до того, как SW2 переключается из выключенного во включенное состояние. Это предназначено для предотвращения снижения эффективности управления компенсацией дрожания с помощью включенного/выключенного состояния в переключении компенсации поступательного дрожания, пока SW2 находится во включенном состоянии, то есть в операции фотографирования.
[0116] Блок 1306 переключения сигнала выбирает и выводит ноль или вывод блока 1304 переключения сигнала в зависимости от вывода блока 1305 определения изменения положения. То есть если изменение положения определяется блоком 1305 определения изменения положения как больше либо равное пороговой величине, когда нажимается SW2, то блок 1306 переключения сигнала выбирает ноль в соответствии с выводом, который указывает результат определения. К тому же, если изменение положения определяется как меньшее пороговой величины, когда нажимается SW2, то выбирается вывод блока 1304 переключения сигнала.
[0117] Оперативная информация 1301 SW2 также вводится в интегральный фильтр 1302 HPF, а вывод интегрального фильтра 1302 HPF инициализируется нулем из-за включенного состояния SW2. Это предназначено для предотвращения невыгодного ступенчатого изменения величины компенсации дрожания, введенной в возбуждающий блок 110, сразу после выполнения компенсации поступательного дрожания; величина компенсации поступательного дрожания инициализируется, если SW2 переключается из выключенного во включенное состояние.
[0118] Фиг. 11 - схема, иллюстрирующая операцию при изменении положения и операцию SW2 для компенсации поступательного дрожания. Показано временное изменение в выводе 1401 блока 1303 регулировки чувствительности и временное изменение в выходных сигналах 1402, 1403 (величины компенсации поступательного дрожания) блока 1306 переключения сигнала. Сигнал 1402, показанный на фиг. 11А, указывает изменение, которое равно нулю, пока не нажимается SW2, и имеет сходство с выводом 1401 после нажатия. Кроме того, показанный на фиг. 11B сигнал 1403 указывает ноль.
[0119] В случае фиг. 11А выполняется компенсация поступательного дрожания, поскольку большое изменение положения не возникает, когда нажимается SW2. SW2 находится в выключенном состоянии при подготовке к фотографированию, и уровень сигнала 1402 указывает ноль. Величина компенсации поступательного дрожания инициализируется нулем в момент нажатия SW2, и вычисляется смещение сдвиг при равном нулю начальном значении. Сигнал 1402 указывает уровень, полученный путем вычитания части смещения из вывода 1401, и величина компенсации поступательного дрожания вычисляется при вычитании этого сдвига, пока не завершается операция фотографирования. В отличие от этого компенсация поступательного дрожания устанавливается так, чтобы не выполняться, если возникает большое изменение положения, когда нажимается SW2, как на фиг. 11B. Уровень сигнала 1403 устанавливается в ноль, когда нажимается SW2, и величина компенсации поступательного дрожания поддерживается в нуле, пока не завершается операция фотографирования.
[0120] Во втором варианте осуществления, хотя компенсация поступательного дрожания может быть выполнена, только когда нажимается SW2 (в операции фотографирования неподвижного изображения), это может быть объединено со способом компенсации поступательного дрожания в первом варианте осуществления. То есть вышеописанная компенсация поступательного дрожания выполняется в операции фотографирования неподвижного изображения путем нажатия SW2. К тому же компенсация поступательного дрожания с использованием радиуса вращения, описанная в первом варианте осуществления, выполняется при подготовке к фотографированию перед тем, как нажимается SW2, и при фотографировании движущегося изображения. В силу этого подходящая компенсация поступательного дрожания возможна в зависимости от ситуации.
[0121] В соответствии со вторым вариантом осуществления установка включения/выключения может быть переключена для компенсации поступательного дрожания в зависимости от рабочего состояния SW2, то есть от того, находится ли кнопка 105 спуска в полностью нажатом состоянии. Это дает возможность компенсации поступательного дрожания наряду с исключением влияния ускорения свободного падения в операции фотографирования. Поэтому эффективность компенсации дрожания в операции фотографирования неподвижного изображения повышается, поскольку более точная компенсация поступательного дрожания может быть выполнена по сравнению с компенсацией поступательного дрожания, использующей радиус вращения, описанной в первом варианте осуществления.
[0122] [Третий вариант осуществления]
[0123] Далее описывается третий вариант осуществления настоящего изобретения.
[0124] Особенностью, которой устройство компенсации дрожания в соответствии с третьим вариантом осуществления отличается от устройства компенсации дрожания в соответствии с шестым вариантом осуществления настоящего изобретения, является конфигурация устройства оценки. В третьем варианте осуществления вывод измерителя 108 угловой скорости вводится в устройство 1501 оценки вместе с сигналом указания возбуждения от возбуждающего блока 110 и выводом элемента на эффекте Холла, как указано пунктирной стрелкой на фиг. 6.
[0125] Фиг. 12 - блок-схема, показывающая внутренний процесс в устройстве 1501 оценки. Устройство оценки скорости параллельного движения в третьем варианте осуществления отличается от примера конфигурации, показанного на фиг. 7, в следующих отношениях:
(1) предоставляется блок 1601 определения состояния колебания, который определяет состояние колебания, так что вывод измерителя 108 угловой скорости служит в качестве ввода; и
(2) предоставляется блок 1604 определения коэффициента усиления Калмана, в котором вывод блока 1601 определения состояния колебания служит в качестве ввода, вывод которого отправляется в фильтр 1001 Калмана, и скорость параллельного движения оценивается с использованием коэффициента усиления Калмана, установленного в блоке 1604 определения коэффициента усиления Калмана.
[0126] Процесс вычисления оцененной скорости параллельного движения описывается ниже.
[0127] Блок 1601 определения состояния колебания вычисляет величину состояния колебания путем получения вывода измерителя 108 угловой скорости и выводит результат в блок 1604 определения коэффициента усиления Калмана. В блоке 1601 определения состояния колебания высокочастотная составляющая отбрасывается блоком 1603 обработки LPF после того, как вывод измерителя 108 угловой скорости преобразован в абсолютное значение с помощью блока 1602 обработки абсолютного значения. Обработанный с помощью LPF сигнал вычисляется в качестве величины состояния колебания.
[0128] Процесс блока 1610 определения состояния колебания описывается со ссылкой на фиг. 13A и 13B. Фиг. 13A иллюстрирует временное изменение в выводе 1701 измерителя 108 угловой скорости и в выводе 1702 блока 1602 обработки абсолютного значения. Фиг. 13B иллюстрирует временное изменение в выводе 1703 блока 1603 обработки LPF.
[0129] Вывод 1701 измерителя 108 угловой скорости, показанный на фиг. 13A, является абсолютным значением, которое было преобразовано в блоке 1602 обработки абсолютного значения, получается вывод 1702, и дальше высокочастотная составляющая отбрасывается в блоке 1603 обработки LPF. Граничная частота LPF, который составляет блок 1603 обработки LPF, устанавливается, например, в частоту 0,5 Гц или меньше, и получается вывод 1703, показанный на фиг. 13B. Кроме того, блок 1603 обработки LPF может быть конфигурацией, в которой скользящее среднее вычисляется в заранее определенном периоде.
[0130] Среди периодов TA-TD, показанных на фиг. 13B, период TB показывает состояние, в котором дрожание рук очень сильное. В этом случае вывод блока 1603 обработки LPF выводится так, чтобы он оставался большим значением. Кроме того, период TD показывает состояние, в котором дрожание рук очень слабое. В этом случае вывод блока 1603 обработки LPF выводится так, чтобы он оставался малым значением.
[0131] Вывод блока 1603 обработки LPF, то есть вывод блока 1601 определения состояния колебания, вводится в блок 1604 определения коэффициента усиления Калмана. Блок 1604 определения коэффициента усиления Калмана выбирает коэффициент усиления Калмана, установленный в соответствии с состоянием колебания, и устанавливает параметры фильтра 1001 Калмана. В блоке 1604 определения коэффициента усиления Калмана пороговые величины определения состояния колебания установлены ранее как Th3, Th2, Th1, показанные на фиг. 13B. Путем сравнения выходного значения блока 1603 обработки LPF с этими пороговыми величинами определения коэффициент усиления Калмана устанавливается в зависимости от результата сравнения, который указывает, в каком диапазоне он находится. То есть в этом примере значения коэффициента усиления Калмана сохраняются в запоминающем устройстве для диапазонов больше Th3, между Th3 и Th2, между Th2 и Th1 и меньше Th1 соответственно.
[0132] Для того чтобы подходящую скорость параллельного движения можно было оценить в зависимости от состояния колебания, ранее получен коэффициент усиления Калмана в зависимости от величины состояния колебания. Путем заблаговременного предсказания помех в зависимости от величины состояния колебания, полученной из угловой скорости, может быть заранее установлен коэффициент усиления Калмана. В этом примере определение состояния колебания выполняется с помощью угловой скорости. Например, это определение состояния колебания не приводит к подходящему значению для оценки поступательного дрожания, если угловая скорость очень большая, а скорость параллельного движения очень маленькая, и если угловая скорость очень маленькая, а скорость параллельного движения очень большая. Однако в случае обычного фотографирования с рук изредка бывает ситуация, в которой вращательное дрожание очень слабое, а поступательное дрожание очень сильное, и величина состояния колебания, полученная с помощью угловой скорости, связана с помехами. Поэтому путем изменения коэффициента усиления Калмана, который ранее установлен, в зависимости от величины состояния колебания, полученной из угловой скорости, подходящая оцененная скорость параллельного движения получается в зависимости от ситуации колебания, и повышается эффективность компенсации дрожания с помощью компенсации поступательного дрожания.
[0133] [Четвертый вариант осуществления]
[0134] Далее описывается четвертый вариант осуществления настоящего изобретения.
[0135] Фиг. 14 - блок-схема, показывающая пример конфигурации устройства 1501 оценки в устройстве компенсации дрожания в соответствии с четвертым вариантом осуществления. Отличиями между фиг. 12 и 14 являются следующие:
(1) вместо блока 1604 определения коэффициента усиления Калмана предоставляется блок 1801 определения входного усиления для управления блоками 1802, 1803 входного переменного усиления; и
(2) блоки 1802 и 1803 входного переменного усиления усиливают вывод (относительное смещение) элемента на эффекте Холла и сигнал указания возбуждения соответственно.
[0136] В четвертом варианте осуществления вывод блока 1601 определения состояния колебания вводится в блок 1801 определения входного усиления. Блок 1802 входного переменного усиления усиливает вывод (относительное смещение) элемента на эффекте Холла и выводит результат в фильтр 1001 Калмана в соответствии с выводом блока 1801 определения входного усиления. К тому же блок 1803 входного переменного усиления усиливает сигнал указания возбуждения и выводит результат в блок 1002 преобразования усилия в соответствии с выводом блока 1801 определения входного усиления. В силу этого оцененная скорость параллельного движения, вычисленная фильтром 1001 Калмана, является большой, если вывод блока 1601 определения состояния колебания является большим, и оцененная скорость параллельного движения, вычисленная фильтром 1001 Калмана, является малой, если вывод блока 1601 определения состояния колебания является малым.
[0137] Для того чтобы подходящую скорость параллельного движения можно было оценить в зависимости от состояния колебания, ранее получено усиление входного сигнала в фильтр 1001 Калмана в зависимости от величины состояния колебания, и блок 1801 определения входного усиления поддерживает значение усиления. Хотя оцененное значение из фильтра 1001 Калмана может использоваться напрямую, если колебание очень сильное, то усиление устанавливается так, чтобы оцененное значение из фильтра 1001 Калмана было малым, если колебание очень слабое. Вот почему забота об ошибочной оценке возникает в случае, в котором, когда колебание слабое, точность оценки у оцененного значения скорости параллельного движения из фильтра Калмана низкая. А именно, если оцененная скорость параллельного движения устанавливается в большое значение, даже если фактическая скорость параллельного движения небольшая, то эффективность компенсации дрожания невыгодно снижается из-за избыточной компенсации при компенсации поступательного дрожания. Чтобы предотвратить это, выполняется вышеописанная установка усиления. В случае обычного фотографирования с рук, поскольку есть немного ситуаций, в которых вращательное дрожание очень слабое, а поступательное дрожание очень сильное, величина компенсации поступательного дрожания ограничивается так, что она не слишком большая, если вращательное дрожание очень слабое.
[0138] В соответствии с четвертым вариантом осуществления путем изменения усиления входного сигнала в фильтр 1001 Калмана, которое установлено ранее, в зависимости от величины состояния колебания, полученной из сигнала обнаружения угловой скорости, может быть предотвращено сокращение эффективности компенсации дрожания при компенсации поступательного дрожания из-за ошибочной оценки скорости параллельного движения.
[0139] [Пятый вариант осуществления]
[0140] Далее описывается пятый вариант осуществления настоящего изобретения.
[0141] Фиг. 15 - блок-схема, показывающая пример конфигурации устройства 1501 оценки из устройства компенсации дрожания в соответствии с пятым вариантом осуществления. Отличиями между фиг. 12 и 15 являются следующие:
(1) вместо блока 1604 определения коэффициента усиления Калмана предоставляется блок 1901 установки граничной частоты перестраиваемого фильтра для управления перестраиваемыми HPF 1902 и 1903; и
(2) перестраиваемые HPF 1902 и 1903 выводят обработанные с помощью HPF сигналы в вывод (относительное смещение) элемента на эффекте Холла и сигнал указания возбуждения соответственно.
[0142] В пятом варианте осуществления вывод блока 1601 определения состояния колебания вводится в блок 1901 установки граничной частоты перестраиваемого фильтра (в дальнейшем называемый "блоком установки граничной частоты"), вывод которого отправляется в перестраиваемый HPF 1902 и перестраиваемый HPF 1903 соответственно. Перестраиваемый HPF 1902, который обрабатывает вывод (относительное смещение) элемента на эффекте Холла, имеет граничную частоту, измененную в зависимости от вывода блока 1901 установки граничной частоты, и выводит обработанный фильтром сигнал в фильтр 1001 Калмана. К тому же перестраиваемый HPF 1903, который обрабатывает сигнал указания возбуждения, имеет граничную частоту, измененную в зависимости от вывода блока 1901 установки граничной частоты, и выводит обработанный фильтром сигнал в блок 1002 преобразования усилия. В соответствии с установкой граничной частоты в зависимости от величины состояния колебания в блоке 1901 установки граничной частоты оцененная скорость параллельного движения, вычисленная фильтром 1001 Калмана, вычисляется без низкочастотного усиления, отбрасываемого, если вывод блока 1601 определения состояния колебания является большим. К тому же оцененная скорость параллельного движения вычисляется с низкочастотным усилением, уменьшаемым, если вывод блока 1601 определения состояния колебания является малым.
[0143] Для того чтобы подходящую скорость параллельного движения можно было оценить в зависимости от состояния колебания, граничная частота каждого перестраиваемого HPF на вывод (относительное смещение) элемента на эффекте Холла и сигнал указания возбуждения установлены ранее в зависимости от величины состояния колебания. Посредством этого оценка подходящей скорости параллельного движения возможна в зависимости от величины состояния колебания. Если величина состояния колебания больше либо равна пороговой величине, то граничная частота перестраиваемого HPF устанавливается на меньший уровень, и может быть напрямую использовано оцененное фильтром 1001 Калмана значение. Однако если величина состояния колебания меньше пороговой величины, то низкочастотное усиление в оцененном значении фильтра 1001 Калмана проектируется небольшим путем установки граничной частоты перестраиваемого HPF в большую. Вот почему забота об ошибочной оценке возникает, когда колебание слабое в случае, в котором точность оценки скорости параллельного движения фильтра 1001 Калмана низкая. А именно, если оцененная скорость параллельного движения вычисляется в большом значении, даже если фактическая скорость параллельного движения небольшая, то эффективность компенсации дрожания невыгодно снижается из-за избыточной компенсации при компенсации поступательного дрожания. Поэтому избыточную компенсацию можно предотвратить с помощью вышеописанной установки граничной частоты перестраиваемого HPF. В случае обычного фотографирования с рук, поскольку есть немного ситуаций, в которых вращательное дрожание очень слабое, а поступательное дрожание очень сильное, настройка фильтра выполняется с тем, чтобы предотвратить ошибку в вычислении низкочастотных характеристик оцененного значения компенсации поступательного дрожания, если вращательное дрожание очень слабое.
[0144] В соответствии с пятым вариантом осуществления путем изменения граничной частоты перестраиваемого HPF, который обрабатывает входной сигнал в фильтр 1001 Калмана, в зависимости от величины состояния колебания, полученной из угловой скорости, можно предотвратить ошибочную оценку скорости параллельного движения, и можно повысить эффективность компенсации дрожания при компенсации поступательного дрожания.
[0145] [Шестой вариант осуществления]
[0146] Далее описывается шестой вариант осуществления настоящего изобретения.
[0147] Фиг. 16 показывает пример конфигурации устройства компенсации дрожания в соответствии с шестым вариантом осуществления.
[0148] В шестом варианте осуществления компенсация вращательного дрожания и компенсация поступательного дрожания не выполняются в возбуждающем блоке 110 и блоке 111 компенсации дрожания, как в первом варианте осуществления, а компенсация вращательного дрожания и компенсация поступательного дрожания выполняются отдельно. То есть компенсация вращательного дрожания выполняется возбуждающим блоком 110 и блоком 111 компенсации дрожания, а компенсация поступательного дрожания выполняется блоком 2001 компенсации дрожания с отсечением изображения. Блок 2001 компенсации дрожания с отсечением изображения выполняет процесс компенсации дрожания путем сдвига области вывода в фотографическом изображении, сформированном из вывода элемента 107 формирования изображения, в соответствии с величиной компенсации поступательного дрожания, выведенной блоком 911 компенсации вывода.
[0149] Отличием между фиг. 6 и 16 является следующее:
(1) на фиг. 16 отсутствует блок 912 сложения, показанный на фиг. 6, и вывод блока 903 регулировки чувствительности вводится в возбуждающий блок 110; и
(2) вывод блока 911 компенсации вывода вводится в блок 2001 компенсации дрожания с отсечением изображения.
[0150] Фиг. 17 - схема, иллюстрирующая то, как процесс компенсации дрожания выполняется путем сдвига области вывода в фотографическом изображении, сформированном с использованием вывода элемента 107 формирования изображения, с помощью процесса в блоке 2001 компенсации дрожания с отсечением изображения.
[0151] Фиг. 17 показывает выходное изображение 2101a из элемента 107 формирования изображения в момент t1 и выходное изображение 2101b из элемента 107 формирования изображения в момент t2 после того, как прошло заранее определенное время (например, после 1/30 секунды). Если не предоставляется средство компенсации дрожания, которое компенсирует дрожание изображения путем смещения фотографической оптической оси, то эти два изображения отличаются друг от друга по композиции из-за вращательного дрожания и поступательного дрожания. В конфигурации на фиг. 16, поскольку компенсация вращательного дрожания выполняется в возбуждающем блоке 110 и блоке 111 компенсации дрожания, и вращательное дрожание компенсируется, композиции будут отличаться друг от друга из-за оставшегося поступательного дрожания.
[0152] Блок 911 компенсации вывода выводит величину компенсации поступательного дрожания в каждом из горизонтального и вертикального направлений в блок 2001 компенсации дрожания с отсечением изображения. Блок 2001 компенсации дрожания с отсечением изображения вычисляет величину перемещения (см. стрелки 2102y, 2102p) отсечения изображения в каждом из горизонтального и вертикального направлений для каждого фотографического кадра, и перемещает (сдвигает) позицию отсечения изображения на величину перемещения (см. стрелки 2102) отсечения изображения. То есть стрелки 2102 представляют величину перемещения, соответствующую поступательному дрожанию и вектору в направлении компенсации. Это приводит диапазон отсечения изображения в момент t1 фотографирования изображения 2101a к диапазону, показанному в изображении 2013. Это также приводит диапазон отсечения изображения в изображении 2101b в момент t2 фотографирования к диапазону, показанному в изображении 2013, и фотографирование движущегося изображения может выполняться над цветком (см. изображение 2104), который является главным фотографическим объектом, без дрожания изображения. В результате выполнения компенсации поступательного дрожания путем отсечения изображения для каждого фотографического кадра компенсация поступательного дрожания может выполняться одновременно с компенсацией вращательного дрожания при фотографировании движущегося изображения.
[0153] В шестом варианте осуществления для компенсации вращательного дрожания используется средство компенсации дрожания, которое компенсирует дрожание изображения путем смещения фотографической оптической оси. Кроме того, для компенсации поступательного дрожания используется средство компенсации дрожания с отсечением изображения, которое выполняет процесс компенсации дрожания путем изменения области вывода фотографического изображения. Посредством этого диапазон возбуждения для компенсации вращательного дрожания и диапазон возбуждения для компенсации поступательного дрожания могут обеспечиваться соответствующим образом. Поэтому, поскольку диапазон возбуждения в компенсации дрожания изображения можно увеличить, непредвиденное снижение эффективности управления компенсацией дрожания можно предотвратить в окрестности границы управления из-за недостаточности диапазона управления компенсацией дрожания.
[0154] [Седьмой вариант осуществления]
[0155] Далее описывается седьмой вариант осуществления настоящего изобретения.
[0156] Фиг. 18 - блок-схема управления, показывающая пример конфигурации устройства 905 оценки. Устройство оценки скорости параллельного движения в седьмом варианте осуществления отличается от примера конфигурации, показанного на фиг. 7, в следующих отношениях:
(1) предоставляется блок 2206 определения панорамирования и положения, который определяет панорамирование и изменение положения, так что вывод измерителя 108 угловой скорости служит в качестве ввода; и
(2) предоставляется блок 2207 определения коэффициента усиления Калмана, в котором вывод блока 2206 определения панорамирования и положения служит в качестве ввода, вывод которого отправляется в фильтр 1001 Калмана, и скорость параллельного движения оценивается с использованием коэффициента усиления Калмана, установленного в блоке 2207 определения коэффициента усиления Калмана.
[0157] Процесс вычисления оцененной скорости параллельного движения описывается ниже.
[0158] Вывод измерителя 108 угловой скорости вводится в блок 2206 определения панорамирования и положения, и результат определения панорамирования и изменения положения, то есть результат сравнения величины изменения положения и пороговой величины, вводится в блок 2207 определения коэффициента усиления Калмана. Посредством этого коэффициент усиления Калмана устанавливается в зависимости от результата определения из блока 2206 определения панорамирования и положения, и изменяется оцененная скорость параллельного движения.
[0159] Процесс до тех пор, пока не оценена скорость параллельного движения на основе результата определения панорамирования в блоке 2206 определения панорамирования и положения, описывается ниже с использованием фиг. 19A и 19B.
[0160] Фиг. 19A показывает временное изменение в выводе 2301 измерителя 108 угловой скорости. Фиг. 19B показывает временное изменение в оцененных скоростях 2302, 2303 параллельного движения. Оцененная скорость 2302 параллельного движения является скоростью параллельного движения, оцененной фильтром 1001 Калмана, если коэффициент усиления Калмана изменяется блоком 2207 определения коэффициента усиления Калмана. Оцененная скорость 2303 параллельного движения является скоростью параллельного движения, оцененной из фильтра 1001 Калмана, если коэффициент усиления Калмана не изменяется блоком 2207 определения коэффициента усиления Калмана. Периоды TA и TD на фиг. 8 являются периодом, в течение которого пользователь находится в обычном состоянии съемки с рук без выполнения панорамирования. В этом случае, поскольку величина изменения положения меньше пороговой величины, блок 2206 определения панорамирования и положения выводит сигнал определения, который указывает "панорамирование не работает". Кроме того, период TB является периодом во время операции панорамирования, и блок 2206 определения панорамирования и положения выводит сигнал определения, который указывает "выполнение операции панорамирования". Период TC является периодом непосредственно до и непосредственно после завершения операции панорамирования, и блок 2206 определения панорамирования и положения выводит сигнал определения, который указывает "завершение операции панорамирования".
[0161] Блок 2206 определения панорамирования и положения определяет, что устройство выполняет операцию панорамирования и подвергается изменению положения, если обнаруженная угловая скорость продолжает быть больше либо равной пороговой величине в течение заранее определенного времени или дольше. Изменение положения до и после момента, когда операция панорамирования завершается, также будет включено в последнее изменение положения. Либо блок может определить, что устройство выполняет операцию панорамирования и подвергается изменению положения, если угловое ускорение, которое является дифференциалом первого порядка обнаруженной угловой скорости, продолжает быть больше либо равным пороговой величине в течение заранее определенного времени или дольше. Либо блок может определить, что устройство выполняет операцию панорамирования и подвергается изменению положения, на основе того, что обнаруженная угловая скорость продолжает быть больше либо равной пороговой величине в течение заранее определенного времени или дольше, и угловое ускорение продолжает быть больше либо равным пороговой величине в течение заранее определенного времени или дольше.
[0162] В периодах TB и TC коэффициент усиления Калмана получен ранее, так что оцененная скорость параллельного движения, которая является результатом вычисления, является небольшой. В частности, необходимо предотвратить ошибочную оценку скорости параллельного движения в периодах TC и TD. Коэффициент усиления Калмана, который соответствует величине обычного дрожания рук, устанавливается в нерабочее панорамирование в периоде TA и TD.
[0163] Управление, с помощью которого оцененная скорость параллельного движения намеренно делается меньше, выполняется путем изменения усиления при условии, в котором скорость параллельного движения становится сильно больше в результате изменения ускорения свободного падения в связи с изменением положения устройства и внешнего возмущающего ускорения во время операции панорамирования. Посредством этого можно предотвратить избыточную компенсацию в компенсации дрожания в соответствии с компенсацией поступательного дрожания во время и непосредственно до и непосредственно после операции панорамирования и изменения положения.
[0164] Далее объясняется вся работа по управлению компенсацией дрожания в соответствии с седьмым вариантом осуществления со ссылкой на фиг. 20A и 20B. Блок-схемы последовательностей операций, показанные на фиг. 20A и 20B, начинаются с операции включения главного источника питания устройства захвата изображения, и выполняются в каждом фиксированном периоде дискретизации в соответствии с программой, интерпретируемой и выполняемой CPU 106.
[0165] Седьмой вариант осуществления отличается от первого варианта осуществления в следующем отношении.
[0166] Этап S2405, следующий за S1204, является процессом определения панорамирования, выполняемым блоком 2206 определения панорамирования и положения, и переходит к этапу S1307, если определяется, что он не выполняет операцию панорамирования, и переходит к этапу S2406, если определяется, что он выполняет операцию панорамирования. На этапе S2406 параметры устройства 905 оценки изменяются, как описано на фиг. 19A и 19B, и процесс переходит к этапу S1205. Вышеописанные предыдущие и последующие процессы (S1201-S1204 и S1205-S1219) аналогичны таковым в первом варианте осуществления.
[0167] Как описано выше, в седьмом варианте осуществления может быть вычислена скорость параллельного движения, и может быть выполнена компенсация поступательного дрожания. Предполагается, что фотограф выполняет операцию фотографирования в зависимости от времени наряду с кадрированием путем следования за фотографическим объектом, или что фотограф выполняет операцию фотографирования наряду с регулированием дрожания угла зрения, вызванного дрожанием рук, и т.п. В этом случае если имеется также влияние поступательного дрожания в отношении дрожания рук, которое не планируется фотографом, то влияние поступательного дрожания большое из-за того, что фотограф намеренно трясет камеру. Если выполняется компенсация поступательного дрожания с использованием радиуса вращения в соответствии с компенсацией вращательного дрожания, то радиус вращения при операции панорамирования является очень большим значением, и можно ошибиться в оценке радиуса вращения при фотографировании сразу после операции панорамирования. То есть если величина компенсации поступательного дрожания стала чрезмерной при фотографировании непосредственно после операции панорамирования и изменения положения, то это невыгодно влияет на результат компенсации дрожания при компенсации дрожания. Поэтому в этом варианте осуществления путем изменения коэффициента усиления Калмана, который ранее установлен в зависимости от результата определения панорамирования и положения, можно предотвратить переоценку скорости параллельного движения во время операции панорамирования и при изменении положения. Кроме того, в операции панорамирования поступательное дрожание станет большим из-за того, что фотограф намеренно трясет устройство захвата изображения и изменяет положение устройства в некотором направлении. В этом случае, поскольку нет необходимости выполнять компенсацию поступательного дрожания, выполняется управление, с помощью которого оцененная скорость параллельного движения намеренно делается меньше, чтобы величина компенсации поступательного дрожания в операции панорамирования была небольшой.
[0168] В соответствии с седьмым вариантом осуществления эффективность компенсации дрожания при компенсации поступательного дрожания повышается путем предотвращения снижения эффективности компенсации дрожания из-за избыточной компенсации поступательного дрожания во время и непосредственно после панорамирования и изменения положения.
[0169] [Восьмой вариант осуществления]
[0170] Далее описывается восьмой вариант осуществления настоящего изобретения.
[0171] Фиг. 21 - блок-схема, показывающая пример конфигурации устройства 905 оценки в устройстве компенсации дрожания в соответствии с восьмым вариантом осуществления. Отличиями между конфигурациями, показанными на фиг. 18 и 21, являются следующие:
(1) вместо блока 2207 определения коэффициента усиления Калмана предоставляются блок 2501 определения входного усиления и блоки 2502 и 2503 входного переменного усиления; и
(2) блоки 2502 и 2503 входного переменного усиления усиливают вывод (относительное смещение) элемента на эффекте Холла и сигнал указания возбуждения соответственно.
[0172] В восьмом варианте осуществления вывод блока 2206 определения панорамирования и положения вводится в блок 2501 определения входного усиления. Вывод блока 2501 определения входного усиления отправляется в каждый из блоков 2502, 2503 входного переменного усиления. Блок 2502 входного переменного усиления усиливает вывод (относительное смещение) элемента на эффекте Холла и выводит результат в фильтр 1001 Калмана в соответствии с выводом блока 2501 определения входного усиления. Кроме того, блок 2503 входного переменного усиления усиливает сигнал указания возбуждения и выводит результат в блок 1002 преобразования усилия в соответствии с выводом блока 2501 определения входного усиления.
[0173] Посредством этого оцененная скорость параллельного движения в фильтре 1001 Калмана является небольшой, если блоком 2206 определения панорамирования и положения определяется, что устройство выполняет операцию панорамирования и подвергается изменению положения. А именно, если возникает состояние панорамирования и изменение положения устройства, то усиление блока 2502 или 2503 входного переменного усиления устанавливается по выводу блока 2501 определения входного усиления, чтобы оцененная скорость параллельного движения была небольшой по сравнению со случаем, в котором определяется, что устройство не выполняет операцию панорамирования. К тому же, если блоком 2206 определения панорамирования и положения определяется, что устройство не выполняет операцию панорамирования и подвергается изменению положения, то блок 2501 определения входного усиления управляет блоком 2502 или 2503 входного переменного усиления, и устанавливается усиление в соответствии с величиной обычного дрожания рук.
[0174] Каждое усиление блоков 2502 и 2503 входного переменного усиления устанавливается для намеренного уменьшения оцененной скорости параллельного движения при условии, в котором скорость параллельного движения становится очень большой из-за влияния ускорения свободного падения в связи с изменением положения устройства и влияния возмущающего ускорения из-за операции панорамирования.
[0175] В соответствии с восьмым вариантом осуществления эффективность компенсации дрожания при компенсации поступательного дрожания повышается путем предотвращения снижения эффективности компенсации дрожания из-за избыточной компенсации при компенсации поступательного дрожания во время и непосредственно после панорамирования и изменения положения.
[0176] [Девятый вариант осуществления]
[0177] Далее описывается девятый вариант осуществления настоящего изобретения.
[0178] Фиг. 22 - блок-схема, показывающая пример конфигурации устройства 905 оценки в устройстве компенсации дрожания в соответствии с девятым вариантом осуществления. Отличиями между конфигурациями, показанными на фиг. 18 и 22, являются следующие:
(1) вместо блока 2207 определения коэффициента усиления Калмана предоставляются блок 2601 установки граничной частоты перестраиваемого фильтра и перестраиваемые HPF 2602 и 2603; и
(2) перестраиваемые HPF 2602 и 2603 выводят обработанный с помощью HPF сигнал в каждый из вывода (относительное смещение) элемента на эффекте Холла и сигнала указания возбуждения.
[0179] В девятом варианте осуществления вывод блока 2206 определения панорамирования и положения вводится в блок 2601 установки граничной частоты перестраиваемого фильтра (в дальнейшем называемый "блоком установки граничной частоты"). Вывод блока 2601 установки граничной частоты вводится в перестраиваемые HPF 2602 и 2603, и граничная частота процесса HPF изменяется относительно каждого из вывода (относительное смещение) элемента на эффекте Холла и сигнала указания возбуждения. Посредством этого граничная частота HPF устанавливается в высокую частоту, если блок 2206 определения панорамирования и положения определяет, что устройство выполняет операцию панорамирования и подвергается изменению положения. То есть усиление, которое меньше либо равно граничной частоте HPF, устанавливается на меньший уровень для оцененной скорости параллельного движения, вычисленной фильтром 1001 Калмана. К тому же, если блоком 2206 определения панорамирования и положения определяется, что устройство не выполняет операцию панорамирования и подвергается изменению положения, то граничная частота HPF устанавливается на меньший уровень и устанавливается для усиления характеристик в соответствии с величиной обычного дрожания рук.
[0180] Граничные частоты перестраиваемых HPF 2602 и 2603 устанавливаются для намеренного уменьшения оцененной скорости параллельного движения при условии, в котором скорость параллельного движения становится очень большой из-за влияния ускорения свободного падения в связи с изменением положения устройства и влияния возмущающего ускорения из-за операции панорамирования.
[0181] В соответствии с девятым вариантом осуществления эффективность компенсации дрожания при компенсации поступательного дрожания повышается путем предотвращения снижения эффективности компенсации дрожания из-за избыточной компенсации при компенсации поступательного дрожания во время и сразу после панорамирования и изменения положения.
[0182] [Десятый вариант осуществления]
[0183] Далее описывается десятый вариант осуществления настоящего изобретения.
[0184] Фиг. 23 - блок-схема, показывающая пример конфигурации устройства 905 оценки в устройстве компенсации дрожания в соответствии с десятым вариантом осуществления. Отличием между конфигурациями, показанными на фиг. 22 и 23, является следующее:
(1) блок 2701 вычисления, который вычисляет оцененную скорость параллельного движения в периоде управления (1 период дискретизации) на 1 единицу раньше, и блок 2702 определения панорамирования и положения предоставляются вместо измерителя 108 угловой скорости и блока 2206 определения панорамирования и положения; и
(2) оцененная скорость параллельного движения в периоде управления на одну единицу раньше вводится из блока 2701 вычисления в блок 2702 определения панорамирования и положения.
[0185] Десятый вариант осуществления отличается от девятого варианта осуществления в следующем отношении.
[0186] Оцененная скорость параллельного движения, которая является выводом блока 1005 сложения, вводится в блок 2701 вычисления, который сохраняет оцененную скорость параллельного движения для вычисления в следующем периоде управления. То есть блок 2701 вычисления является средством задержки, который удерживает оцененную скорость параллельного движения в предыдущем периоде управления, вывод которого отправляется в блок 2702 определения панорамирования и положения, и определяется, выполняет ли устройство операцию панорамирования и подвергается ли изменению положения. Результат определения вводится в блок 2601 установки граничной частоты. Последующие процессы аналогичны таковым в девятом варианте осуществления.
[0187] Процесс до тех пор, пока оценивается скорость параллельного движения из результата определения панорамирования в блоке 2702 определения панорамирования и положения, описывается ниже с использованием фиг. 24.
[0188] Оцененная скорость 2801 параллельного движения, показанная на фиг. 24, является скоростью параллельного движения, оцененной фильтром 1001 Калмана, если блок 2601 установки граничной частоты не изменяет граничные частоты перестраиваемых HPF 2602 и 2603. К тому же оцененная скорость 2802 параллельного движения является скоростью параллельного движения, оцененной фильтром 1001 Калмана, если блок 2601 установки граничной частоты не изменяет граничные частоты перестраиваемых HPF 2602 и 2603 в ответ на результат определения от блока 2702 определения панорамирования и положения.
[0189] В периоде TA на фиг. 24 пользователь находится в обычном состоянии съемки с рук без выполнения панорамирования, блок 2702 определения панорамирования и положения выводит сигнал определения, который указывает "панорамирование не работает". В периоде TB определяется, что устройство выполняет операцию панорамирования и подвергается изменению положения на основе оцененной скорости параллельного движения. Блок 2702 определения панорамирования и положения определяет, что устройство выполняет операцию панорамирования и подвергается изменению положения, если оцененная скорость параллельного движения продолжает быть больше либо равной пороговой величине в течение заранее определенного времени или дольше. Либо блок также может определить, что устройство выполняет операцию панорамирования и подвергается изменению положения, если оцененное ускорение параллельного движения, которое является дифференциалом первого порядка оцененной скорости параллельного движения, продолжает быть больше либо равным пороговой величине в течение заранее определенного времени или дольше. В качестве альтернативы блок может определить, что устройство пребывает в операции панорамирования и изменении положения, если оцененная скорость параллельного движения продолжает быть больше либо равной пороговой величине в течение заранее определенного времени или дольше, и оцененное ускорение параллельного движения продолжает быть больше либо равным пороговой величине в течение заранее определенного времени или дольше.
[0190] Граничные частоты у перестраиваемых HPF 2602 и 2603 устанавливаются на больший уровень, чем обычно, блоком 2601 установки граничной частоты в некотором периоде, если определяется, что устройство выполняет операцию панорамирования и подвергается изменению положения. В примере на фиг. 14 скорость параллельного движения оценивается в соответствии с величиной обычного дрожания рук во время не работающего панорамирования, показанного в периодах TA и TC. В операции панорамирования, показанной в периоде TB, граничная частота фильтра у перестраиваемого HPF устанавливается на больший уровень, чем обычно, и оцененная скорость параллельного движения управляется, чтобы быть небольшой. Для этого необходимо предотвратить ошибочную оценку скорости параллельного движения, особенно в периоде TC.
[0191] Граничные частоты перестраиваемых HPF 2602 и 2603 устанавливаются для намеренного уменьшения оцененной скорости параллельного движения при условии, в котором скорость параллельного движения становится очень большой из-за влияния ускорения свободного падения в связи с изменением положения устройства и влияния возмущающего ускорения из-за операции панорамирования. Посредством этого можно предотвратить избыточную компенсацию при компенсации дрожания в соответствии с компенсацией поступательного дрожания в операции панорамирования и при изменении положения.
[0192] Кроме того, в десятом варианте осуществления применяется конфигурация, в которой настройка перестраиваемых HPF 2602 и 2603 изменяется в соответствии с результатом определения панорамирования и изменения положения. Однако вышеописанная конфигурация также может применяться, если коэффициент усиления Калмана изменяется, как в первом варианте осуществления, и если входное переменное усиление изменяется в первой части фильтра Калмана, как в восьмом варианте осуществления. В этом случае путем выполнения определения панорамирования и изменения положения из оцененной скорости параллельного движения в предыдущем периоде управления можно предотвратить избыточную компенсацию при компенсации дрожания в компенсации поступательного дрожания в операции панорамирования и при изменении положения.
[0193] Хотя варианты осуществления настоящего изобретения описаны со ссылкой на примерные варианты осуществления, нужно понимать, что изобретение не ограничивается раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации, чтобы заключать в себе все такие модификации и равноценные конструкции и функции.
[0194] Данная заявка притязает на преимущество заявок на патент Японии № 2011-130614 и 2011-130615, зарегистрированных 10 июня 2011 г., которые настоящим полностью включаются в данный документ путем отсылки.
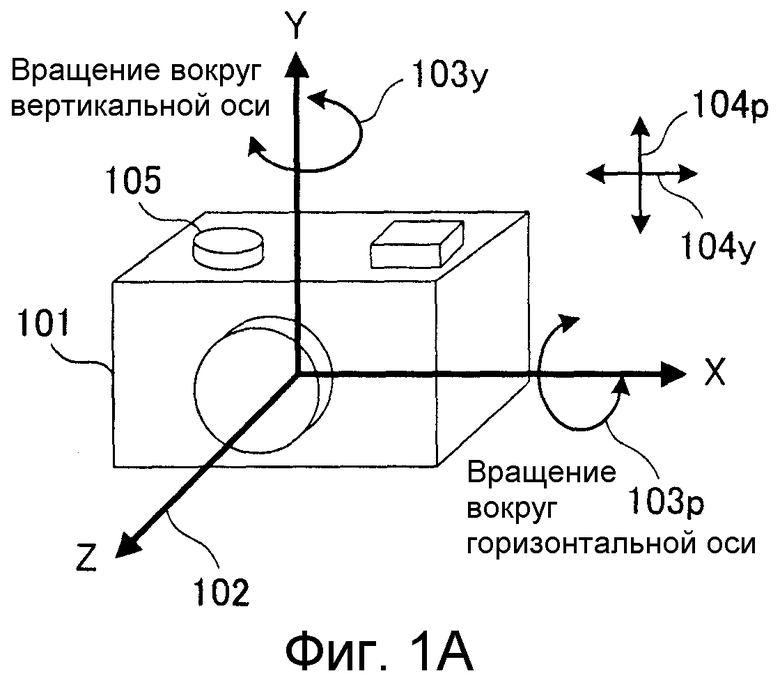
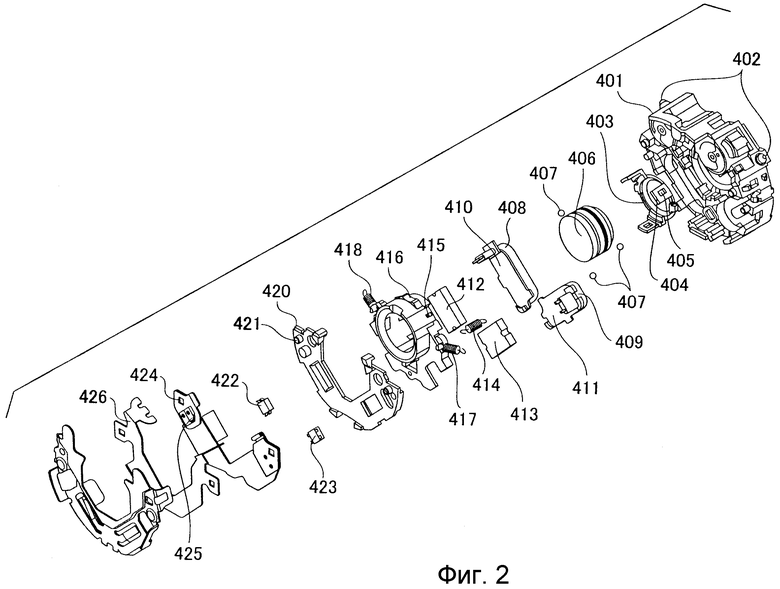
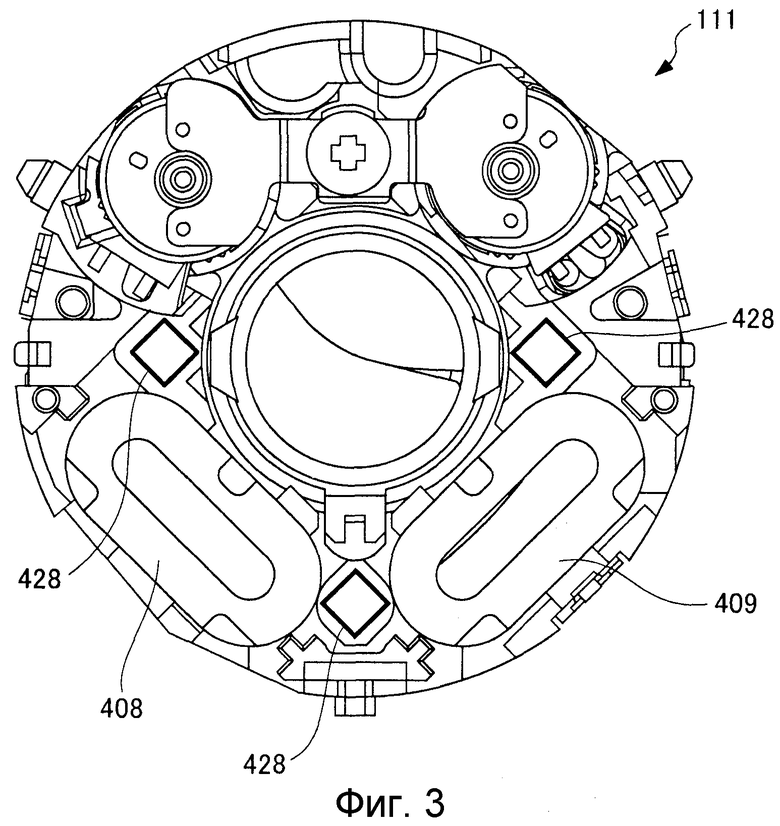
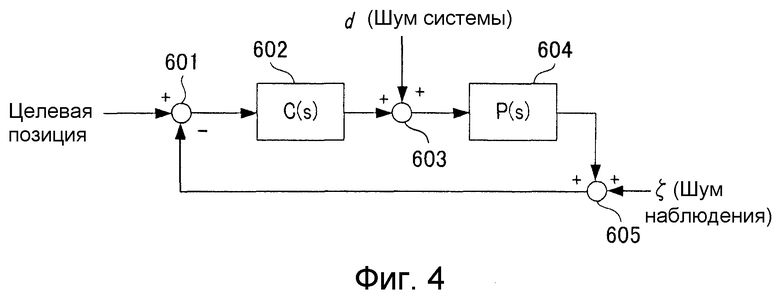
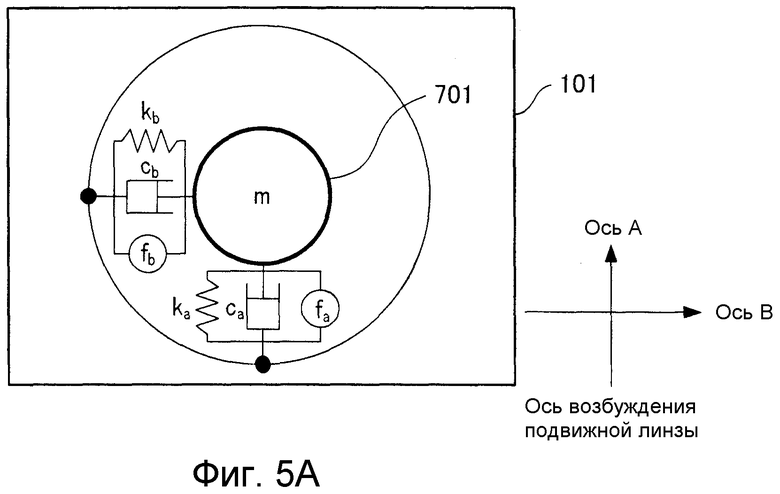
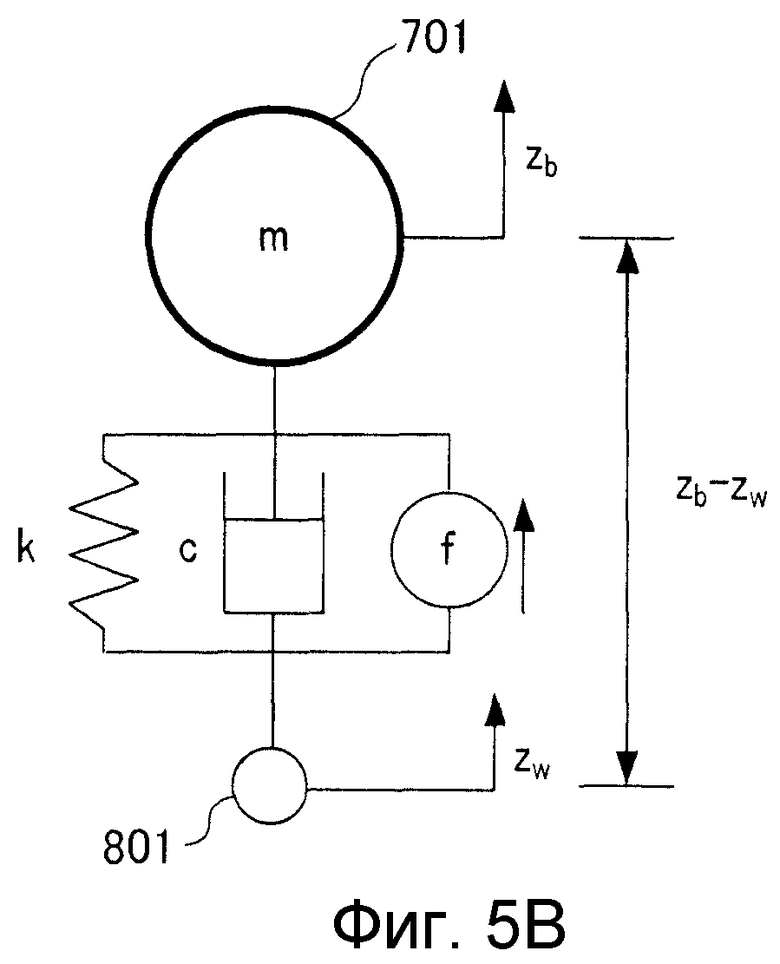
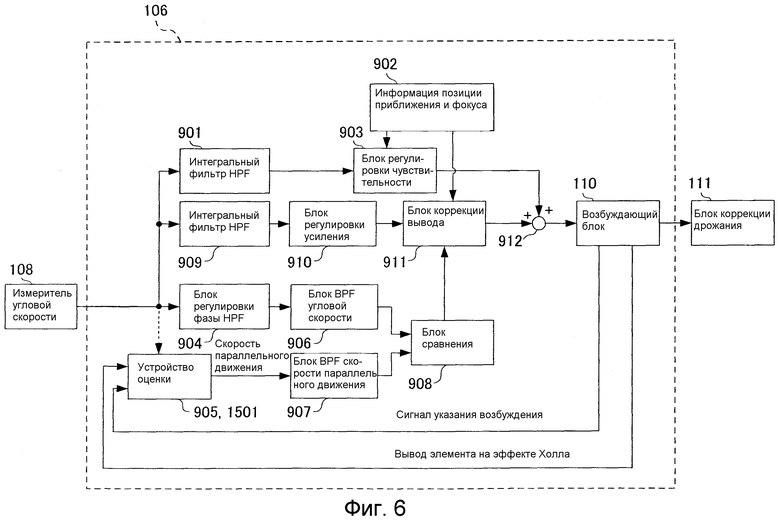
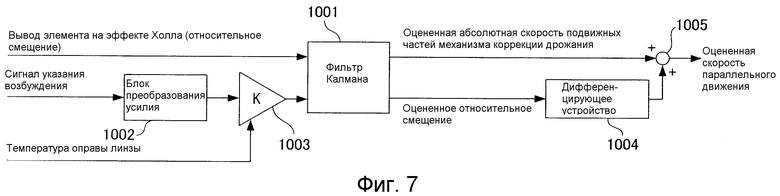
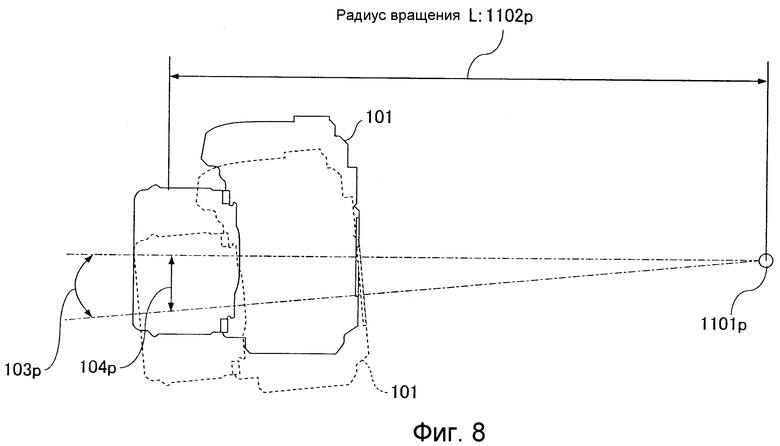
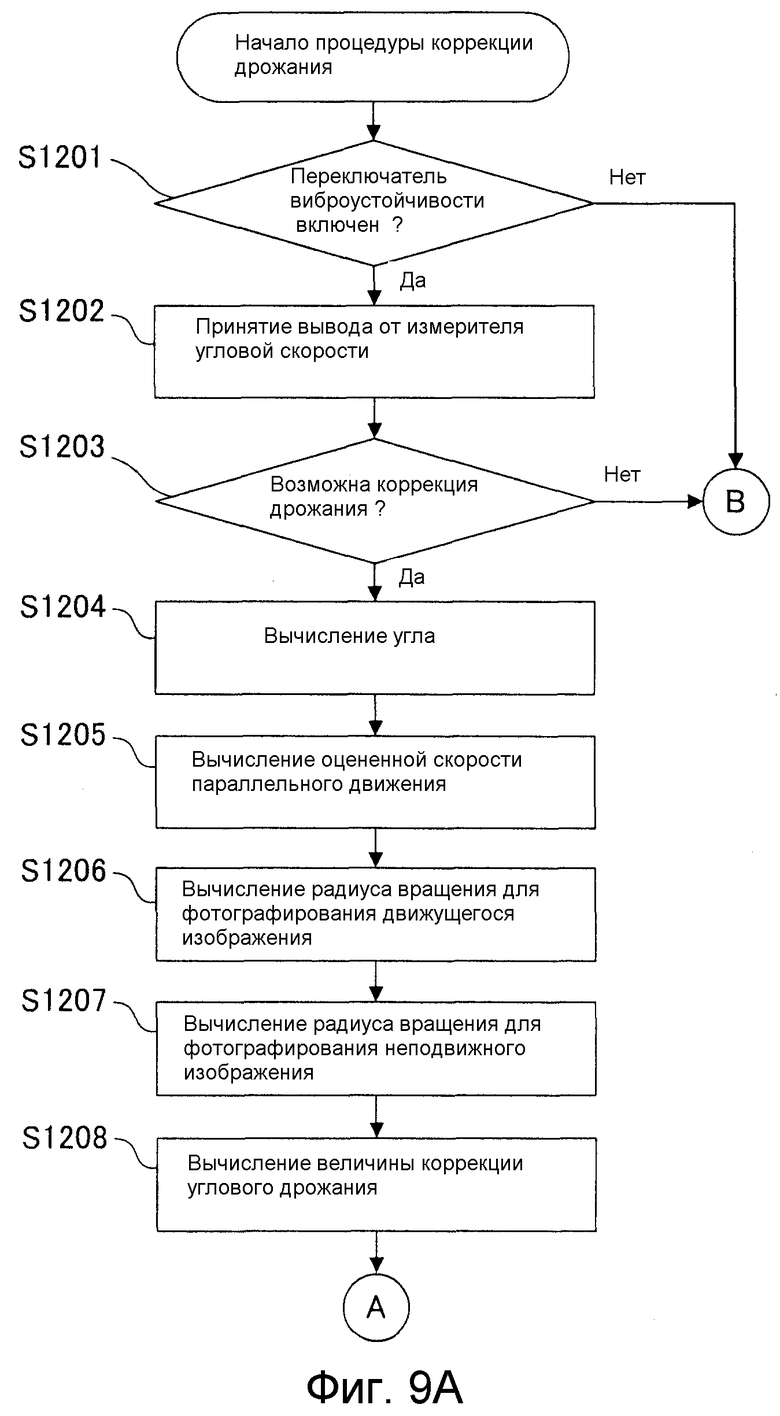
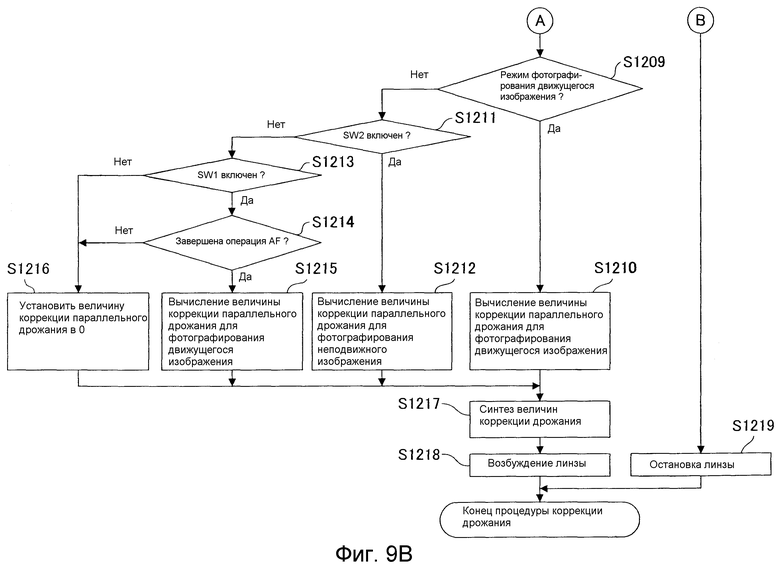
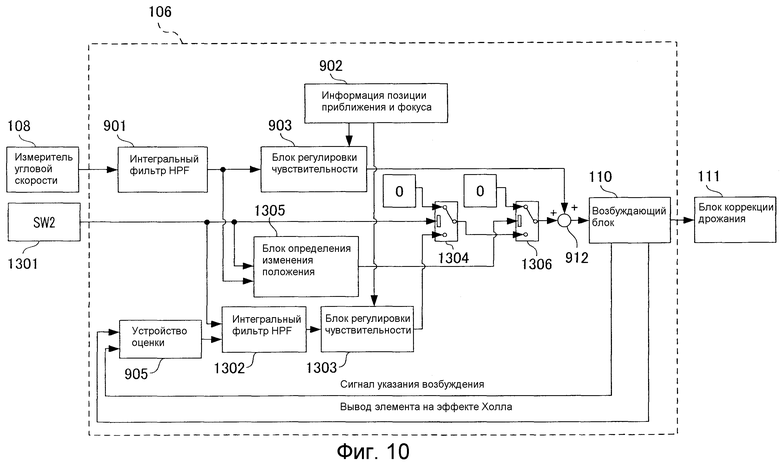
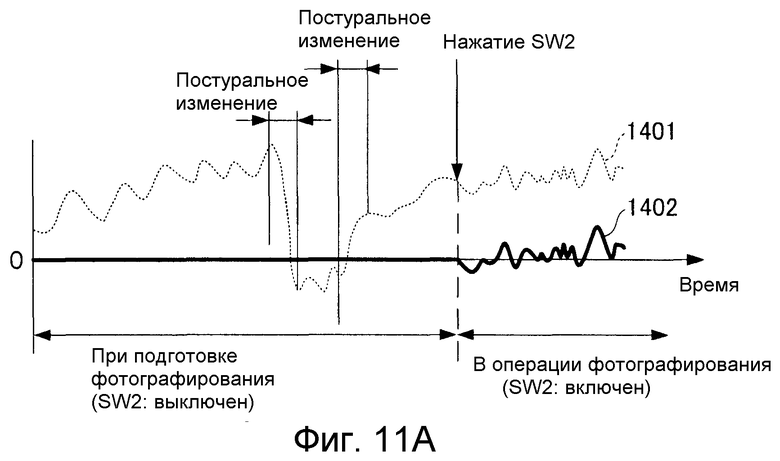
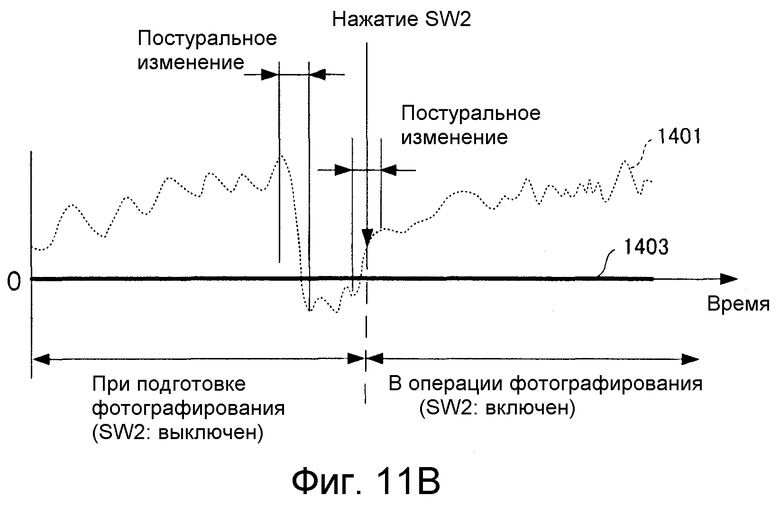
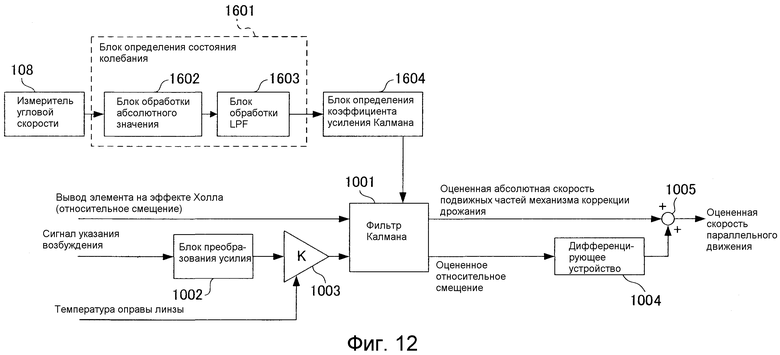
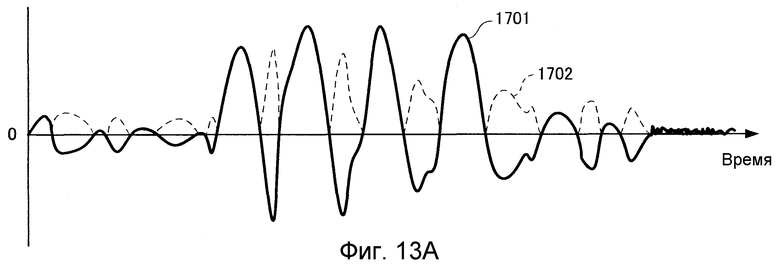
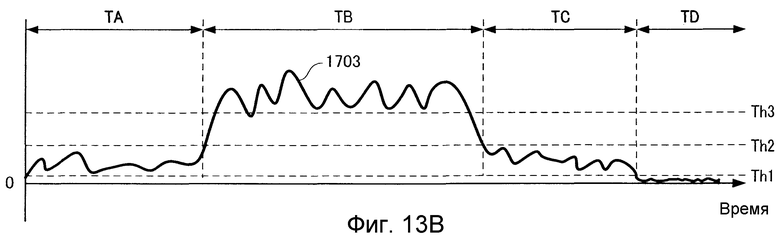
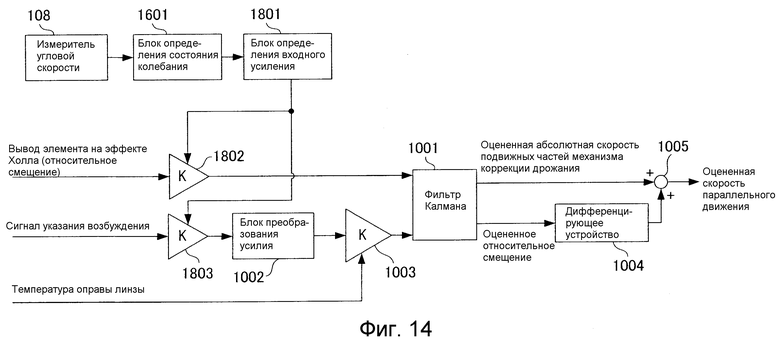
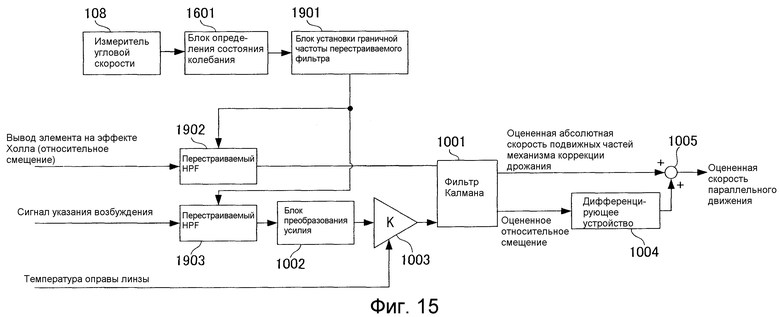
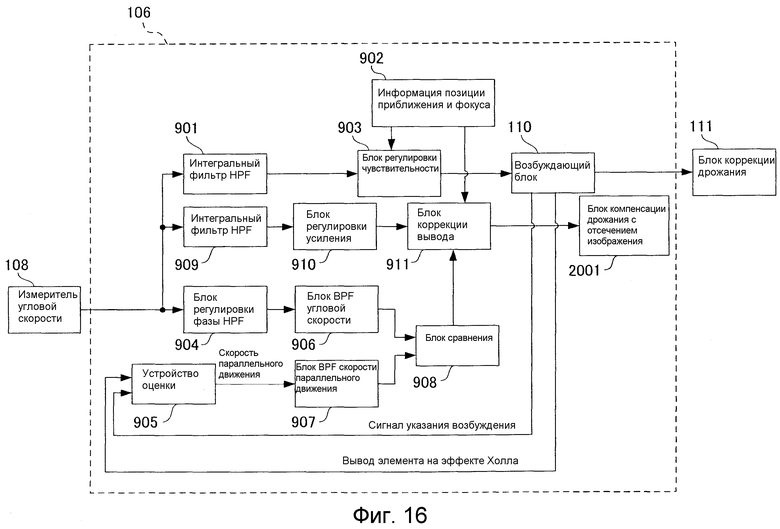
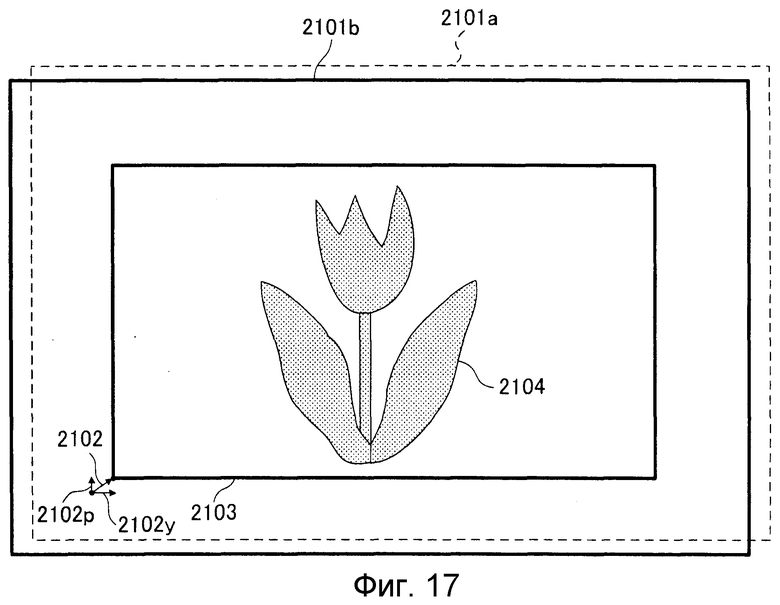
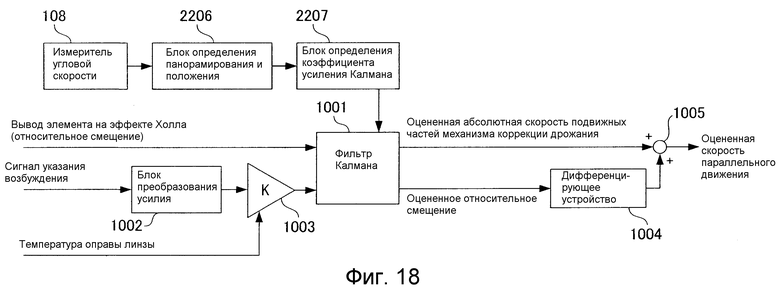
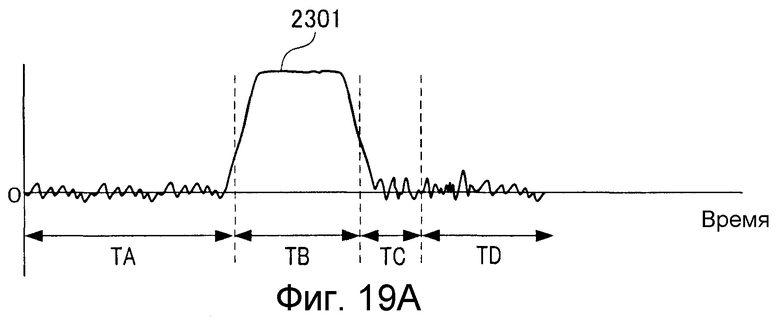
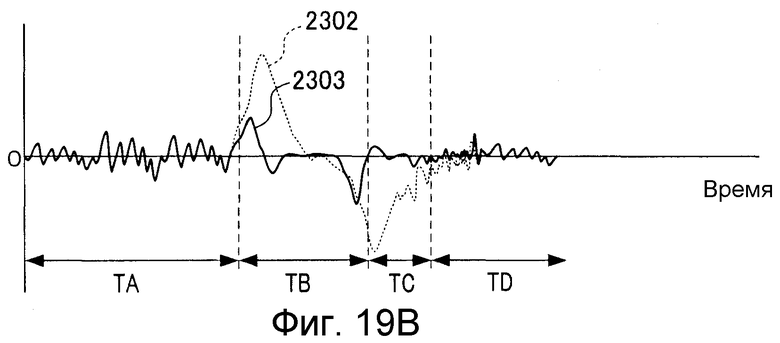
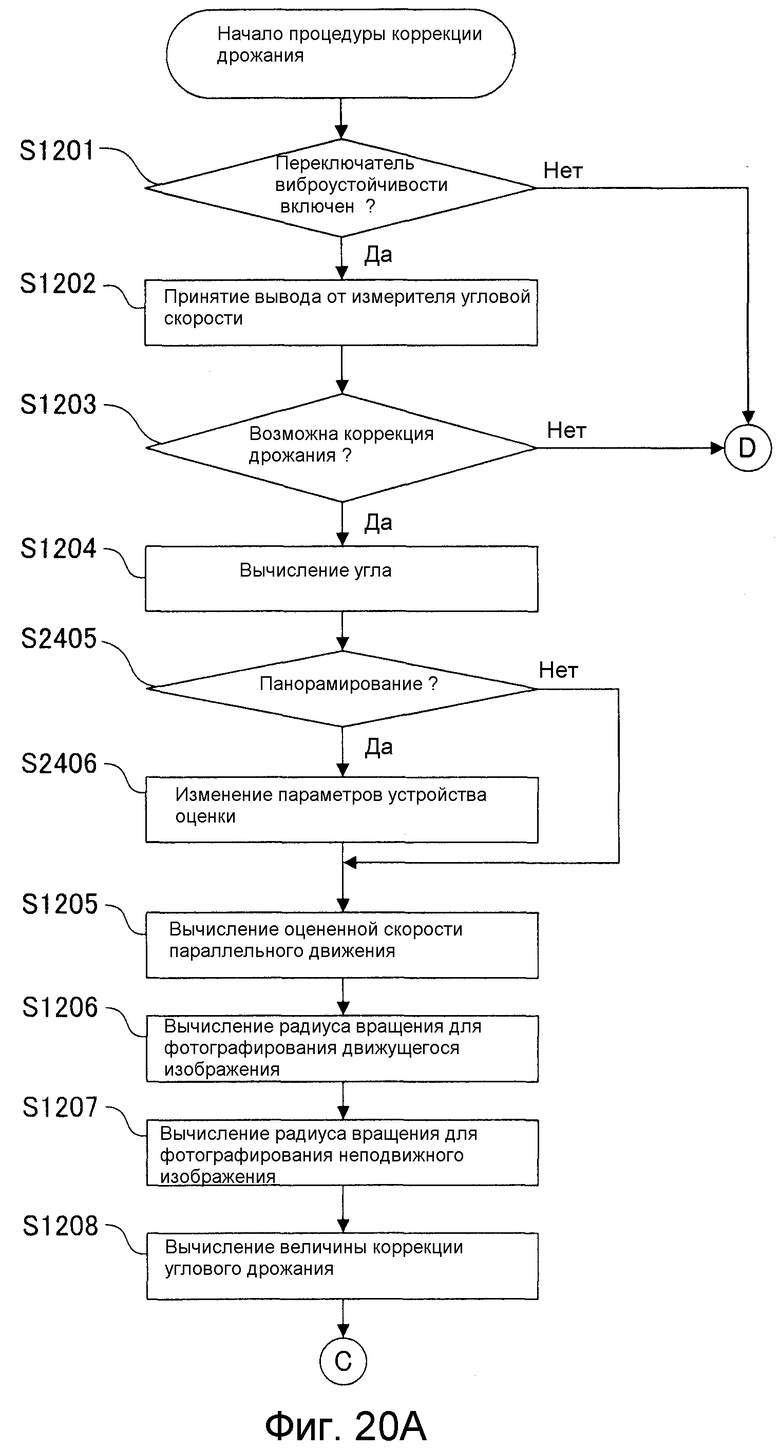
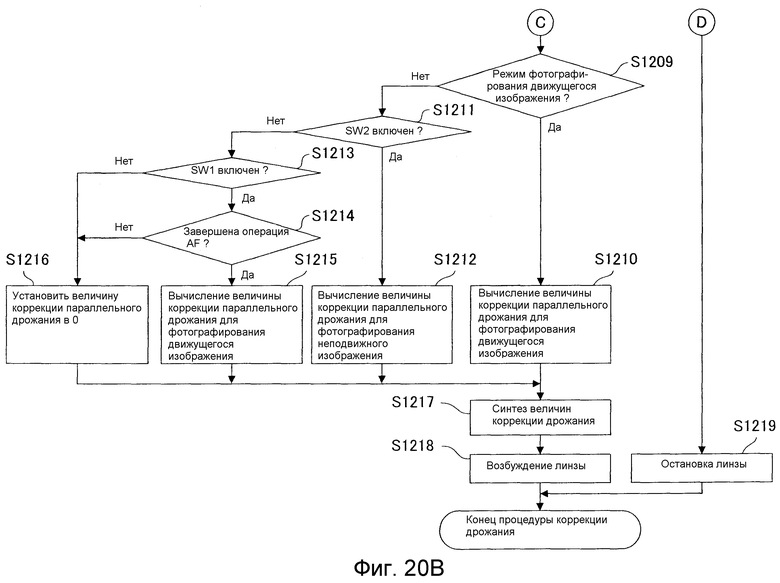
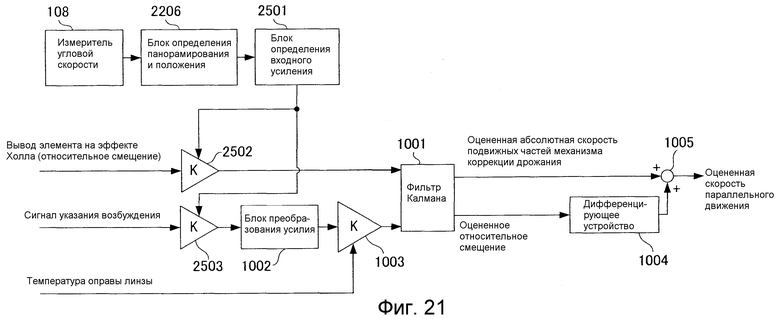
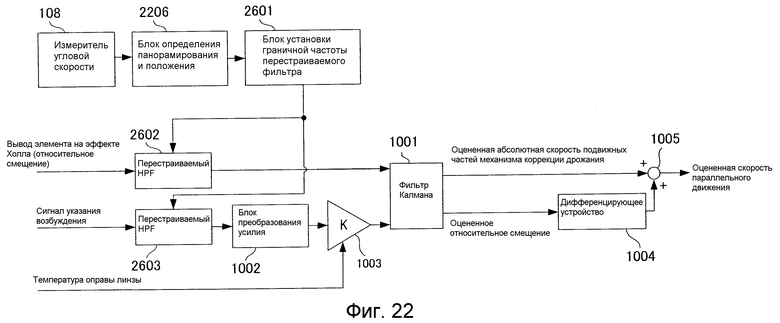
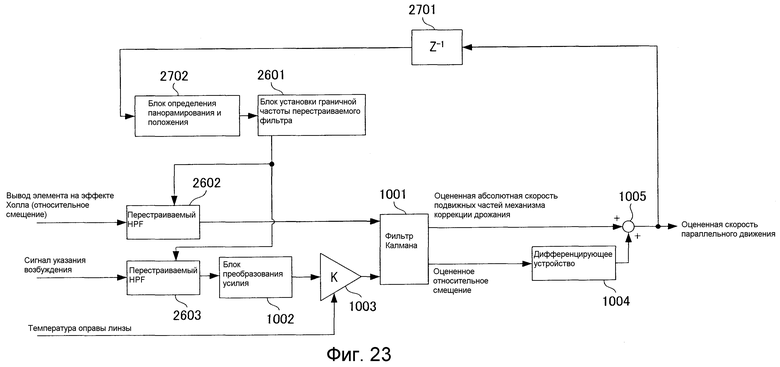
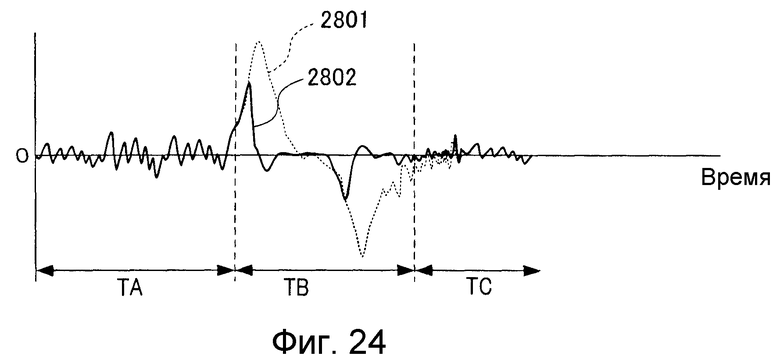
Изобретение относится к методике компенсации дрожания изображения вследствие дрожания рук и т.п. для предотвращения ухудшения изображения. Технический результат заключается в выполнении компенсации для поступательного дрожания без добавления датчика для обнаружения поступательного дрожания. Устройство содержит блок компенсации дрожания перемещением не параллельно оптической оси, блок, возбуждающий блок компенсации дрожания, блок обнаружения позиции блока компенсации дрожания, блок вычисления величины компенсации. 4 н. и 10 з.п. ф-лы, 31 ил.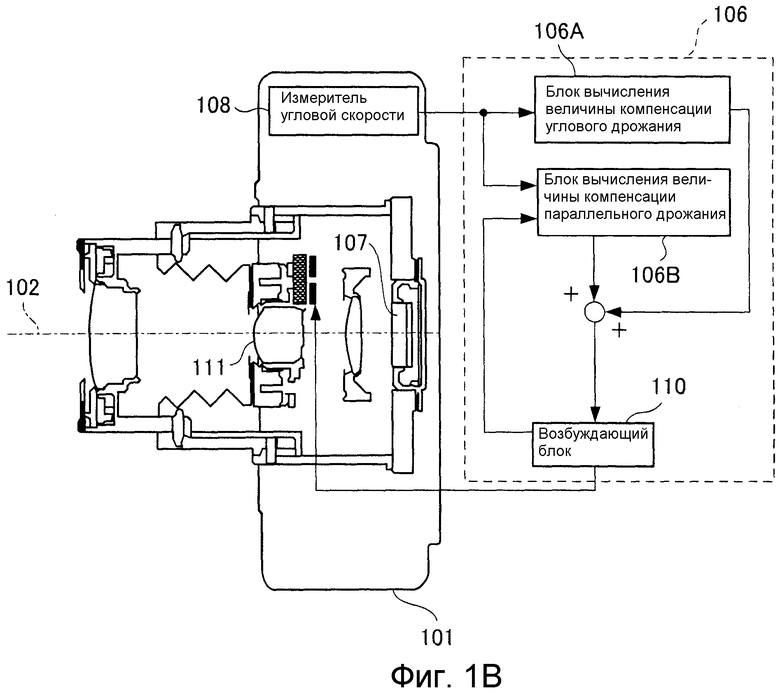
1. Устройство компенсации дрожания изображения, сконфигурированное для компенсации дрожания с помощью возбуждения элемента компенсации дрожания, при этом устройство содержит:
блок компенсации дрожания, сконфигурированный для компенсации дрожания путем перемещения непараллельно оптической оси;
возбуждающий блок, сконфигурированный для возбуждения блока компенсации дрожания на основе сигнала указания возбуждения;
блок обнаружения позиции, сконфигурированный для обнаружения позиции блока компенсации дрожания, чтобы вывести сигнал обнаружения позиции; и
блок вычисления величины компенсации, сконфигурированный для обнаружения составляющей поступательного дрожания в дрожании устройства из перемещения блока компенсации дрожания, так что сигнал указания возбуждения и сигнал обнаружения позиции служат в качестве ввода, и вычисления величины компенсации блока компенсации дрожания из величины дрожания устройства, включающей в себя составляющую поступательного дрожания.
2. Устройство по п.1,
в котором блок вычисления величины компенсации содержит блок наблюдения, содержащий модели вибрации блока компенсации дрожания, так что сигнал указания возбуждения в возбуждаемый блок, который составляет блок компенсации дрожания, и сигнал обнаружения позиции возбуждаемого блока служат в качестве ввода;
и
в котором поступательное дрожание вычисляется с использованием блока наблюдения.
3. Устройство по п.2,
в котором блок наблюдения является устройством оценки, использующим фильтр Калмана, выполняющий вычисление поступательного дрожания так, что относительное смещение между возбуждаемым блоком и крепежным блоком, поддерживающим возбуждаемый блок, служит в качестве переменной состояния, а возбуждающее усилие в блок компенсации дрожания служит в качестве входной переменной.
4. Устройство по п.2, дополнительно содержащее:
блок определения положения, сконфигурированный для по меньшей мере определения состояния панорамирования устройства или изменения положения устройства,
в котором блок наблюдения изменяет параметры, чтобы результат вычисления в соответствии с поступательным дрожанием был небольшой, если определяется, что возникает состояние панорамирования или изменение положения устройства, по сравнению с тем, когда не определяется, что возникает состояние панорамирования или изменение положения устройства.
5. Устройство по п.4,
в котором блок наблюдения является устройством оценки, использующим фильтр Калмана, выполняющий вычисление поступательного дрожания так, что относительное смещение между возбуждаемым блоком и крепежным блоком, поддерживающим возбуждаемый блок, служит в качестве переменной состояния, а возбуждающее усилие в блок компенсации дрожания служит в качестве входной переменной; и
в котором усиление фильтра Калмана изменяется в качестве изменения параметров.
6. Устройство по п.2, дополнительно содержащее:
блок обнаружения угловой скорости, сконфигурированный для обнаружения угловой скорости дрожания устройства,
в котором блок вычисления величины компенсации содержит:
первый блок вычисления величины компенсации, сконфигурированный для вычисления величины компенсации вращательного дрожания, вызванного в связи с вращением устройства, центрированным на оси, перпендикулярной оптической оси оптической системы формирования изображения, с использованием сигнала обнаружения угловой скорости блоком обнаружения угловой скорости; и
второй блок вычисления величины компенсации, сконфигурированный для вычисления величины компенсации поступательного дрожания с использованием блока наблюдения, так что относительное смещение между возбуждаемым блоком и крепежным блоком, поддерживающим возбуждаемый блок, служит в качестве переменной состояния, а возбуждаемое усилие в блок компенсации дрожания служит в качестве входной переменной,
в котором возбуждающий блок возбуждает блок компенсации дрожания в соответствии с величиной компенсации, вычисленной путем синтезирования величины компенсации вращательного дрожания и величины компенсации поступательного дрожания.
7. Устройство по п.6,
в котором второй блок вычисления величины компенсации содержит:
блок вычисления коэффициента компенсации, сконфигурированный для вычисления коэффициента компенсации из оцененной скорости поступательного дрожания, вычисленной блоком наблюдения, и сигнала обнаружения угловой скорости блоком обнаружения угловой скорости; и
блок компенсации вывода, сконфигурированный для компенсации вывода первого блока вычисления величины компенсации с использованием коэффициента компенсации от блока вычисления коэффициента компенсации.
8. Устройство по п.6, дополнительно содержащее:
блок определения, сконфигурированный для обнаружения состояния колебания из угловой скорости дрожания устройства, чтобы сравнить его с пороговой величиной; и
блок определения усиления, сконфигурированный для изменения усиления фильтра Калмана, которое установлено ранее для результата определения блока определения.
9. Устройство по п.6, дополнительно содержащее:
блок переменного усиления для сигнала указания возбуждения или сигнала обнаружения позиции в возбуждаемый блок;
блок определения, сконфигурированный для обнаружения состояния колебания из угловой скорости дрожания устройства, чтобы сравнить его с пороговой величиной; и
блок определения усиления, сконфигурированный для изменения усиления блока переменного усиления по результату определения блока определения.
10. Устройство по п.6, дополнительно содержащее:
фильтр верхних частот для сигнала указания возбуждения или сигнала обнаружения позиции в возбуждаемый блок;
блок определения, сконфигурированный для обнаружения состояния колебания из угловой скорости дрожания устройства, чтобы сравнить его с пороговой величиной; и
блок установки, сконфигурированный для изменения граничной частоты фильтра верхних частот по результату определения блока определения.
11. Устройство получения изображения, сконфигурированное для компенсации дрожания с помощью возбуждения блока компенсации дрожания, содержащее:
блок формирования изображения, сконфигурированный для преобразования изображения фотографического объекта, сформированного оптической системой формирования изображения, в изображение;
блок обнаружения позиции, сконфигурированный для обнаружения позиции блока компенсации дрожания;
блок вычисления величины компенсации, сконфигурированный для вычисления величины компенсации, чтобы возбуждать блок компенсации дрожания;
блок изменения, сконфигурированный для изменения диапазона отсечения изображения из блока формирования изображения в соответствии с величиной компенсации; и
возбуждающий блок, сконфигурированный для возбуждения блока компенсации дрожания,
где блок вычисления величины компенсации получает величину возбуждения блока компенсации дрожания и вывод блока обнаружения позиции, обнаруживает дрожание устройства, включающее в себя поступательное дрожание, вызванное в связи с поступательным движением устройства в направлении, перпендикулярном оптической оси оптической системы формирования изображения, и вычисляет величину компенсации; и
где блок изменения изменяет диапазон отсечения в соответствии с величиной компенсации поступательного дрожания, вычисленной блоком вычисления величины компенсации.
12. Устройство по п.11, дополнительно содержащее:
блок обнаружения угловой скорости, сконфигурированный для обнаружения угловой скорости дрожания устройства,
в котором блок вычисления величины компенсации содержит:
первый блок вычисления величины компенсации, сконфигурированный для вычисления величины компенсации вращательного дрожания, вызванного в связи с вращением устройства, центрированным на оси, перпендикулярной оптической оси оптической системы формирования изображения, с использованием сигнала обнаружения угловой скорости блоком обнаружения угловой скорости; и
второй блок вычисления величины компенсации, сконфигурированный для вычисления величины компенсации поступательного дрожания с использованием блока наблюдения, состоящего из моделей вибрации блока компенсации дрожания, так что сигнал указания возбуждения в возбуждаемый блок, который составляет блок компенсации дрожания, и сигнал обнаружения позиции возбуждаемого блока служат в качестве ввода,
в котором возбуждающий блок возбуждает блок компенсации дрожания в соответствии с величиной компенсации вращательного дрожания; и
в котором блок изменения изменяет диапазон отсечения в соответствии с величиной компенсации поступательного дрожания.
13. Способ управления компенсацией дрожания изображения, выполняемый в устройстве компенсации дрожания, сконфигурированном для компенсации дрожания с помощью возбуждения блока компенсации дрожания, содержащий:
этап возбуждения, на котором возбуждают блок компенсации дрожания на основе сигнала указания возбуждения;
этап обнаружения позиции, на котором обнаруживают позицию блока компенсации дрожания, чтобы вывести сигнал обнаружения позиции;
этап вычисления величины компенсации, на котором обнаруживают составляющую поступательного дрожания среди дрожания устройства из перемещения блока компенсации дрожания, так что сигнал указания возбуждения и сигнал обнаружения позиции служат в качестве ввода, и вычисляют величину компенсации блока компенсации дрожания из величины дрожания устройства, включающей в себя составляющую поступательного дрожания.
14. Способ управления отсечением изображения, выполняемый в устройстве получения изображения, сконфигурированном для компенсации дрожания с помощью возбуждения блока компенсации дрожания, содержащий:
этап обнаружения позиции, на котором обнаруживают позицию блока компенсации дрожания;
этап вычисления величины компенсации, на котором обнаруживают дрожание устройства, включающее в себя поступательное дрожание, вызванное в связи с поступательным движением устройства в направлении, перпендикулярном оптической оси оптической системы формирования изображения, и вычисляют величину компенсации, чтобы возбуждать блок компенсации дрожания, используя величину возбуждения блока компенсации дрожания и сигнал обнаружения позиции на этапе обнаружения позиции; и
этап изменения, на котором получают величину компенсации поступательного дрожания для изменения диапазона отсечения изображения от блока формирования изображения.
| УСТРОЙСТВО И СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ И УСТРОЙСТВО И СПОСОБ ОТОБРАЖЕНИЯ ИЗОБРАЖЕНИЙ | 2008 |
|
RU2419243C1 |
| ЦИФРОВОЙ ФОТОАППАРАТ | 2006 |
|
RU2384968C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ЭФФЕКТА ДРОЖАНИЯ РУК В ВИДЕОКАМЕРЕ | 1998 |
|
RU2164032C2 |
| JP 4679238 B2, 27.04.2011 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6332060 B1, 18.12.2001 | |||

