Изобретение относится к области планирования введения концентрических канюль в тело, например тело человека, проходящего лечение.
Нижеприведенные родственные заявки и патентные документы включены в настоящую заявку путем отсылки:
Патент США № 4,949,277, выданный 14 августа 1990 г., авторы Trovato et al.
Патент США № 5,879,303, выданный 9 марта 1999 г., авторы Averkiou et al.
Патент США № 6,604,005, выданный 5 августа 2003 г., авторы Dorst et al.
Ранее поданная родственная заявка США № 12/088870, авторы Trovato et al., дата подачи 6 октября 2006 г. (3D Path Planning, Simulation and Control System), публикация заявки на патент США № 2008/0234700 от 25 сентября 2008 г.
Ранее поданные родственные предварительные заявки США № 61/075,886 от 26 июня 2008 г. и № 61/099,223 от 23 сентября 2008 г., авторы Trovato et al. (Method and System for Fast, Precise Path Planning), которые являются международной заявкой № PCT/IB2009/05250, поданной 16 июня 2009 г.
Ранее поданная родственная предварительная заявка США № 61/106287, авторы Greenblatt et al., дата подачи 17 октября 2008 г. (Interlocking Nested Cannula), которая является международной заявкой № PCT/IB2009/054474, поданной 12 октября 2009 г.
Ранее поданная родственная международная заявка № IB2007/053253, автор Trovato, дата подачи 15 августа 2007 г. (Active Cannula Configuration for Minimally Invasive Surgery), международная публикация № WO 2008/032230 A1, 20 марта 2008 г.
Ранее поданная родственная предварительная заявка США № 61/075401, автор Trovato, дата подачи 25 июня 2008 г. (Nested Cannulae for Minimally Invasive Surgery), по которой имеется международная заявка № PCT/IB2009/052521, поданная 12 июня 2009 г.
Приведенные документы, в совокупности, характеризуют медицинское применение, которое можно кратко описать, в итоге, следующим образом:
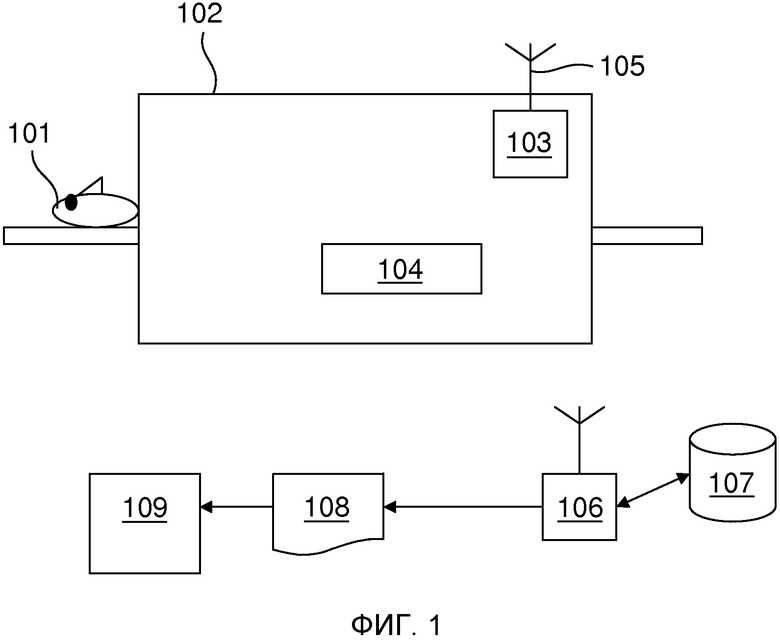
На фиг. 1 показано, как пациента 101 сканируют в сканирующем устройстве 102. Сканирующее устройство может быть любого подходящего типа, например ультразвуковым, компьютерным томографическим (КТ) сканером или магнитно-резонансным (МР) сканером. Возможно сканирование любого участка тела, например легких пациента. Результатом сканирования будет представление изображения внутренней структуры тела пациента. Внутренняя структура может содержать трубчатые каналы, например дыхательные пути в легких, кровеносные сосуды, уретру, носовые ходы или кишечник. Внутренние пространства могут быть более открытыми, например, желудок, мочевой пузырь или синусы. В некоторых случаях, внутренняя структура будет сплошной тканью, но предпочтительными представляются некоторые зоны, например внутри мозга. Медицинское применение не ограничено каким-либо конкретным методом сканирования или каким-либо конкретным внутренним пространством тела.
Сканирующее устройств будет содержать процессор 103 для сбора и обработки данных сканирования. Процессор может быть любого подходящего типа и, обычно, будет содержать по меньшей мере один машинно-считываемый носитель информации для хранения исполняемого программного кода и данных. Возможно присутствие нескольких процессоров и нескольких носителей информации одного или нескольких разных типов. Процессор часто будет каким-либо способом осуществлять связь с внешними устройствами. Представленный процессор изображен с антенной 105 для беспроводной связи, но связь может быть, равным образом, проводной, по сети Интернет, в инфракрасном диапазоне, по оптическому волокну или любым другим подходящим способом. Сканирующее устройство будет также содержать по меньшей мере один пользовательский интерфейс 104, содержащий по меньшей мере что-то одно из: дисплея, сенсорного экрана, клавиатуры, указательного устройства, микрофона, динамика, принтера и/или любого другого периферийного устройства пользовательского интерфейса. Настоящее изобретение не ограничено какими-либо конкретными периферийными устройствами для связи с пользователем или с внешним оборудованием.
Хотя вся обработка может происходить в сканирующем устройстве, в данном случае возможно также наличие внешнего процессора 106 для выполнения планирования траектории и принятый набор «результирующих форм» для следования по траектории. Процессор 106 будет связан с по меньшей мере одним носителем 107 информации для хранения данных и управляющей программы. Носитель 107 информации может содержать накопители различных типов, например магнитный, оптический или электронный, а также память, например кэш-память, в которой могут постоянно храниться выполняемая программа и структуры данных. Выход способа планирования изображен схематически и содержит техническое описание 108 в любом подходящем формате, а также сами концентрические канюли 109.
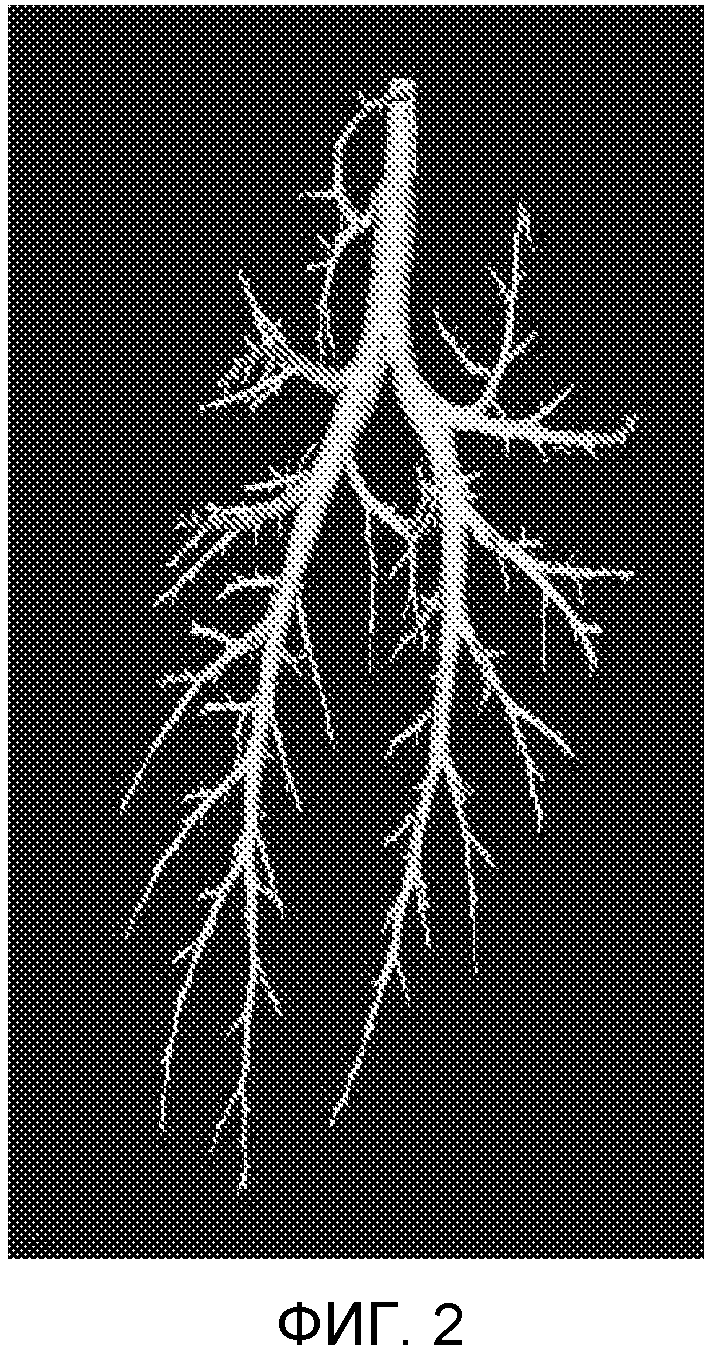
На фиг. 2 представлено изображение трубчатых каналов в легких пациента, сегментированных на основе сканированного изображения. Медицинские устройства желательно вводить в трубчатые каналы, так как при этом минимизируется повреждение в процессе проведения в заданное местоположение. Данный тип хирургии, когда для прохода по каналам используют эндоскоп, назвали NOTES (транслюминальная эндоскопическая хирургия сквозь естественные отверстия). Данный тип хирургии не требует, чтобы объект хирургического вмешательства находился внутри трубчатого канала, но при этом подход к объекту вмешательства обеспечивается с меньшими повреждениями, благодаря применению инструментов, которые проходят по существующим трубкам, чтобы можно было транслюминально достигать объект вмешательства.
Предлагались трубчатые устройства, например активные канюли, смотри, например, R. J. Webster et al., «Toward Active Cannulas: Miniature Snake-like Surgical Robots» 2006 IEEE/RSJ (Oct. 2006, Beijing, China) pp. 2857-2863. Данные устройства используют взаимодействие между по меньшей мере двумя трубками, чтобы обеспечивать поперечное перемещение по мере того, как трубки поворачиваются одна относительно другой. Когда трубки выдвигаются одна из другой, трубки также могут обеспечивать различные поперечные перемещения, в частности, если трубки имеют разные значения кривизны вдоль одной трубки. Если тщательно охарактеризовать перемещение, то данные перемещения можно использовать для достижения нескольких местоположений, подобно роботу в свободном пространстве. Однако данные устройства могут представлять трудности при транслюминальном выдвижении, если поперечное перемещение больше, чем пространство, доступное для манипуляций. В статье Уэбстера с соавторами (R. J. Webster et al.) рассмотрены взаимодействия трубок во время развертывания, однако вопросы, относящиеся к обеспечению следования активных канюль по запланированной траектории, рассмотрены недостаточно.
Упомянутые устройства могут способствовать сбору данных, сбору ткани или выполнению других способов. Например, на основании изображения пациента, набор трубок можно выдвигать от максимальной трубки до минимальной трубки таким образом, что при развертывании трубки имеют конструкцию, в которой, по меньшей мере, участок каждой канюли будет оставаться на проксимальном конце от пациента, а канюли меньшего размера будут выдвигаться во внутреннее пространство пациента в порядке, обратном диаметрам. Таким образом, канюли с наибольшими диаметрами будут оканчиваться в более проксимальной позиции, а канюли с наименьшими диаметрами будут выдвигаться в более дистальную позицию. В настоящем описании, будет принято, что канюля находится в более дистальной позиции, если канюля оканчивается в более дистальной позиции после развертывания, и в более проксимальной позиции после развертывания, если канюля оканчивается в более проксимальной позиции.
Телескопические канюли несколько отличаются от активных канюль, так как телескопические канюли сконфигурированы с возможностью достижения определенных местоположений в определенных окружающих условиях, при минимальном поперечном перемещении (покачивании). В одной разновидности телескопических канюль трубки взаимно блокируются так, что не поворачиваются одна относительно другой. Введение должно сводить к минимуму повреждения трубчатых каналов или других тканей. Упомянутые повреждения могут быть следствием перемещений канюль. Телескопические канюли описаны, например, в ранее поданной родственной предварительной заявке США № 61/106287 авторов Greenblatt et al., поданной 17 октября 2008 г. (Interlocking Nested Cannula), которая является международной заявкой № PCT/IB2009/054474, поданной 12 октября 2009 г.
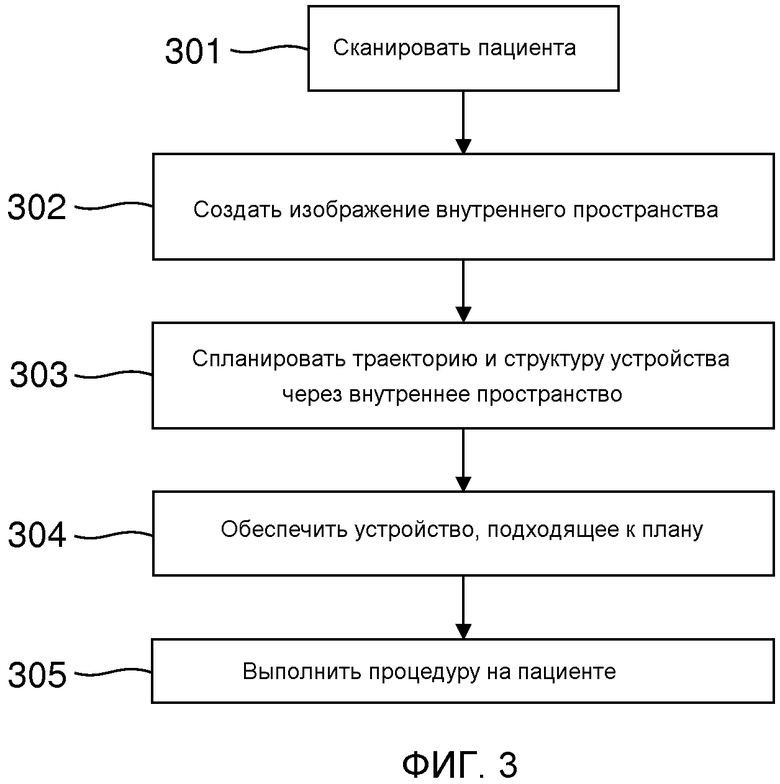
На фиг. 3 схематично представлен пример способа, подлежащего выполнению. Сначала пациента сканируют на этапе 301. Затем, на этапе 302, создается изображение, указывающее запрещенные области и, обычно, стоимости прохода через другие области. Например, изображение можно сегментировать для выделения дыхательных путей из остальной части изображения, как показано на фигуре 2. Затем, на этапе 303, планируется траектория, содержащая последовательность форм. Как пояснялось в ранее поданных заявках по планированию траектории, планирование требует точного определения исходного местоположения для начала поиска. Затем проектируют устройство концентрической канюли, чтобы обеспечить заданные формы, которые получены практикующим врачом на этапе 304. И, наконец, можно выполнять требуемую процедуру на пациенте на этапе 305 посредством выдвижения трубок в заданном порядке.
При гибкости современной технологии многие из приведенных операций можно выполнять дистанционно. Например, данные можно обрабатывать с созданием модели внутреннего пространства (например, сегментированного) в одном местоположении. Траекторию через пространство и устройство, пригодное для следования по данной траектории, можно планировать во втором местоположении. Затем устройство можно собрать в третьем местоположении, перед возвращением технику или врачу для введения в пациента. В предпочтительном варианте, сборка телескопической канюли будет выполняться на производстве с высоким уровнем контроля качества и санитарным контролем; однако возможно, что все приведенные этапы могут выполняться в одном местоположении самим врачом, собирающим устройство для введения.
Предлагалось применять планирование траектории по алгоритму A* (A звезда) для облегчения развертывания активных канюль, смотри, например, «3D TOOL PATH PLANNING, SIMULATION AND CONTROL SYSTEM», ранее поданную родственную заявку США № 12/088870 авторов Trovato et al., поданную 6 октября 2006 г., публикацию заявки на патент США № 2008/0234700 от 25 сентября 2008 г., которая включена в настоящую заявку путем отсылки и является составной частью настоящей заявки. При планировании упомянутого типа используют «пространство конфигураций». «Пространство конфигураций» является структурой данных, хранящихся на по меньшей мере одном машинно-считываемом носителе информации. Пространство конфигураций представляет информацию о физическом пространстве выполнения задачи. В данном случае, физическое пространство выполнения задачи является внутренней структурой тела пациента, в которую планируется вводить канюли. Пространство конфигураций содержит множество «вершин» или «состояний», каждая(ое) из которых представляет конфигурацию устройства во время введения.
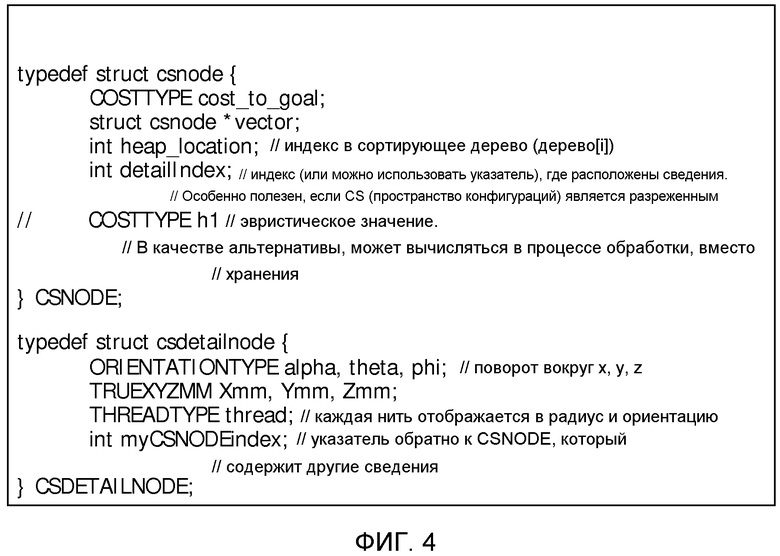
На фиг. 4 показана исходная управляющая программа, предназначенная для создания вершины в пространстве конфигураций, соответствующая принципам ранее поданных родственных предварительных заявок США №№ 61/075,886 от 26 июня 2008 г. и 61/099,223 от 23 сентября 2008 г., авторов Trovato et al., и, предпочтительно, усовершенствованная для минимизации памяти, использующей способ, изложенный в упомянутых заявках. Приведенная управляющая программа преобразуется в машинно-исполняемую программу и переносится на носитель информации для использования в изобретении. Когда программа будет исполняться, она будет приводить к созданию структуры данных пространства конфигураций, которая будет содержаться на носителе информации. Упомянутая конкретная программа оказалась очень эффективной в применении к внутренним пространствам тела человека. Данная программа позволяет уплотнять 6-мерное пространство до 3-мерного пространства посредством дополнения траекторий 3-мерного пространства конфигураций высокоточными местоположениями и ориентациями, вместо вывода из положения их состояния конфигурации.
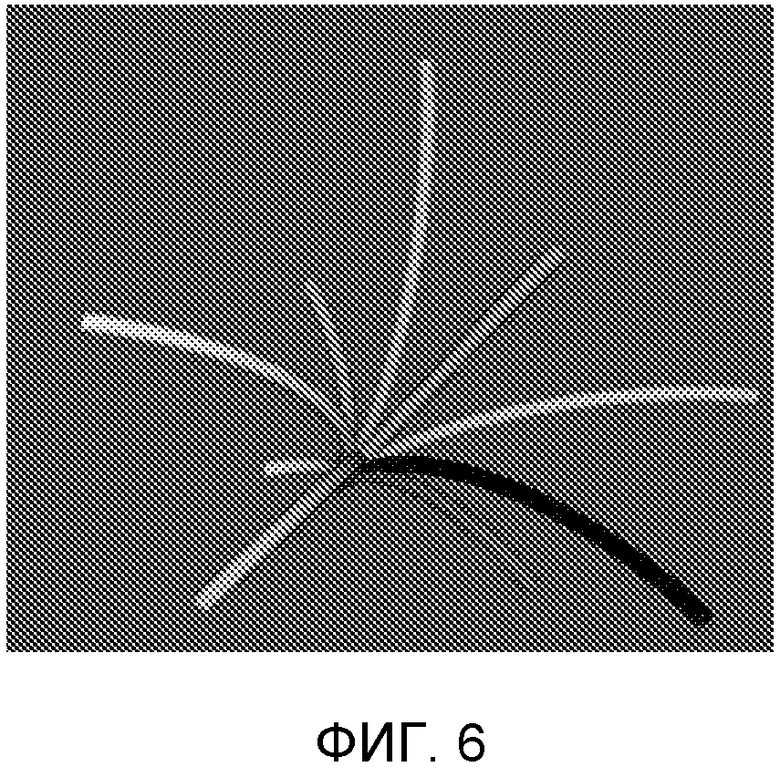
Алгоритм A* (A звезды) или «распространение волн стоимости», при применении к пространству конфигураций, будет просматривать пространство конфигураций и оставлять направления, например указатель, приводящие к «наилучшей траектории к началу» в каждом исследованном состоянии. «Распространение волн стоимости» предусматривает запуск из начала поиска, часто пункта назначения. Распространение волн стоимости по структуре данных пространства конфигураций использует структуру данных дополнительного типа, содержащуюся на носителе информации, известную как «окрестность». Окрестность является машинно-считываемой спецификацией допустимых переходов из одного состояния в пространстве конфигураций в другие состояния внутри пространства конфигураций. Например, на фиг. 6 показана одна кривизна одной дуги (называемой также волокном) из восьми равноотстоящих поворотов относительно заданного местоположения. Длины дуг могут быть ограничены значениями менее чем 90 или 180 градусов, в зависимости от прикладной задачи, и нить, показанная в центре (дуга нулевой кривизны), также может быть ограничена, приблизительно, такой же длиной.
Распространение волн стоимости содержит также «метрику», которая является функцией, которая оценивает стоимость, обусловленную переходом из одного состояния в соседнее состояние.
Термин «концентрические канюли» будет применяться в настоящем описании к вышеописанным активным канюлям и телескопическим канюлям. Настоящее изобретение применимо к обоим типам.
Материалом, предпочтительным для применения в активных канюлях, является Ni-Ti (никель-титановый) сплав (нитинол). Нитинол обладает «памятью формы», т.е. форму нитиноловой трубки/проволоки можно программировать или предварительно устанавливать при высоких температурах. Поэтому при низких температурах (например, комнатной температуре или температуре тела), если трубка меньшего размера выдвигается из трубки большего размера, трубка возвращается к своей «запрограммированной форме». Другое преимущество нитинола состоит в том, что его можно использовать в магнитно-резонансном томографе. Данный материал характеризуется относительно высокой прочностью и поэтому допускает изготовление тонкостенных конструкций, допускающих вложение нескольких трубок. На рынке широко доступны трубки с наружным диаметром от 5 мм вплоть до 0,2 мм из 0,8 мм и меньше. Применимы также другие материалы, например поликарбонат, в частности, для дешевых, взаимно блокирующихся телескопических канюль.
Концентрические канюли, соответствующие существующему уровню техники, относятся к двум общим типам:
«Активные канюли» представляют собой канюли, трубки которых могут поворачиваться одна относительно другой во время развертывания; и
«Телескопические канюли» представляют собой канюли, трубки которых конструктивно выполнены так, чтобы не допускать, насколько возможно, поворота.
Настоящее изобретение применимо к обоим типам. Однако в предпочтительном варианте, угловая ориентация трубки остается фиксированной в процессе развертывания, так как поворот может причинить повреждение ткани.
Материалом, предпочтительным для применения в активных канюлях, является Ni-Ti (никель-титановый) сплав (нитинол). Нитинол обладает «памятью формы», т.е. форму нитиноловой трубки/проволоки можно программировать или предварительно устанавливать при высоких температурах. Поэтому, при низких температурах (например, комнатной температуре), если трубка меньшего размера выдвигается из трубки большего размера, трубка принимает свою запрограммированную форму. Другое преимущество нитинола состоит в том, что его можно использовать в магнитно-резонансном томографе. Данный материал характеризуется относительно высокой прочностью и поэтому допускает изготовление тонкостенных конструкций, допускающих вложение нескольких трубок. На рынке широко доступны трубки с наружным диаметром от 5 мм вплоть до 0,2 мм из 0,8 мм и меньше. Тем не менее, применимы также другие материалы, например различные сорта пластиков.
В предпочтительном варианте, результатом планирования является:
развертываемый физический набор концентрических канюль; и/или
описание набора канюль в виде значений длин и радиусов.
В рамках существующих способа и устройств остаются некоторые области, требующие совершенствования, например, можно было бы расширить функциональные возможности телескопических канюль, если можно было применить больше радиусов кривизны. Повреждение тканей пациента можно дополнительно уменьшить путем учета влияния характеристик нескольких канюль в наборе на совместную кривизну.
По меньшей мере одну из приведенных целей целесообразно достигать с использованием адаптивных окрестностей и усовершенствованных вычислений. Различные цели и варианты осуществления станут понятными из последующего текста.
Нижеследующие фигуры служат для иллюстрации изобретения с помощью неограничивающего примера.
Фиг. 1 - изображение, поясняющее сканирование пациента.
Фиг. 2 - изображение модели легких.
Фиг. 3 - блок-схема последовательности операций способа, в котором задействовано изобретение.
Фиг. 4 - примерная управляющая программа для реализации главных элементов структуры данных пространства конфигураций.
Фиг. 5 - схематическая спецификация окрестности вариантов выбора угловых ориентаций трубок, с изображением симметричных угловых ориентаций.
Фиг. 6 - схематическая спецификация окрестности нитей трубок, основанной на взаимодействии предшествующей (родительской) нити, с другими номинальными нитями, повернутыми под углами, показанными на фиг. 5.
Фиг. 7 - изображение канюль с различными радиусами кривизны.
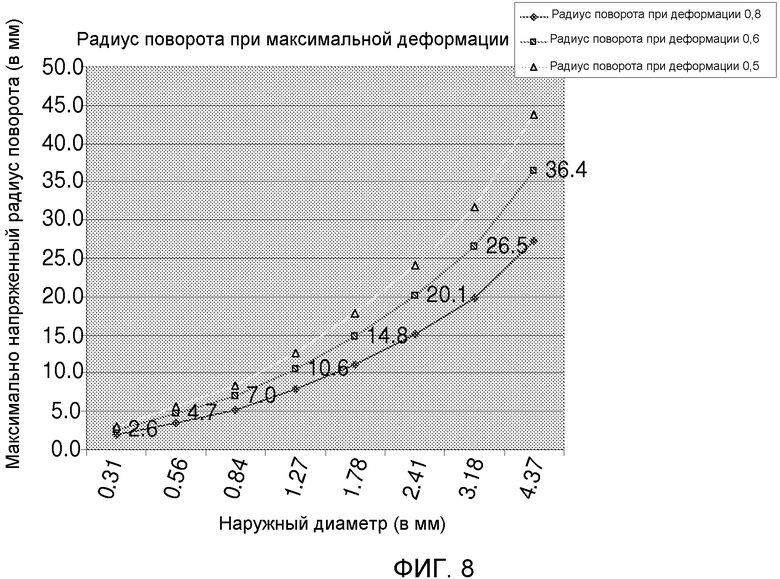
Фиг. 8 - график результатов моделирования, относящегося к радиусу поворота канюли в зависимости от максимальной деформации.
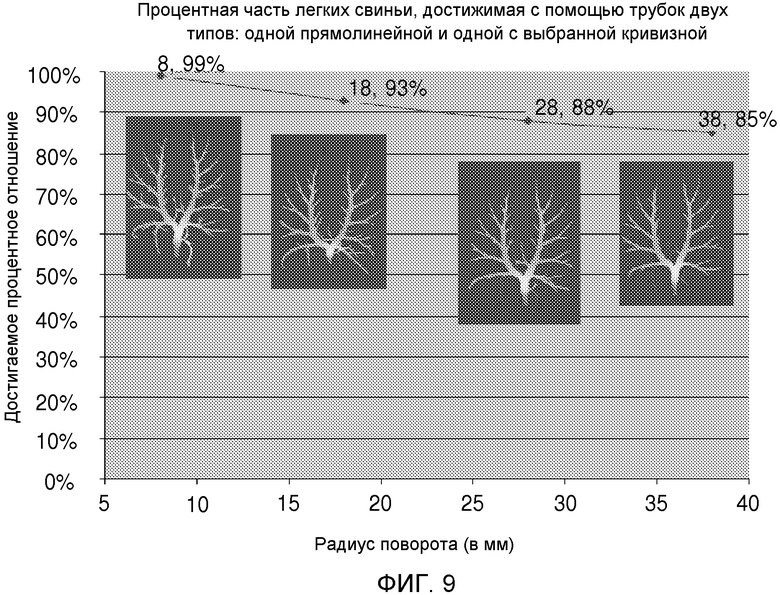
Фиг. 9 - график результатов моделирования, относящегося к процентной части легких свиньи, достижимой в зависимости от радиуса поворота канюли.
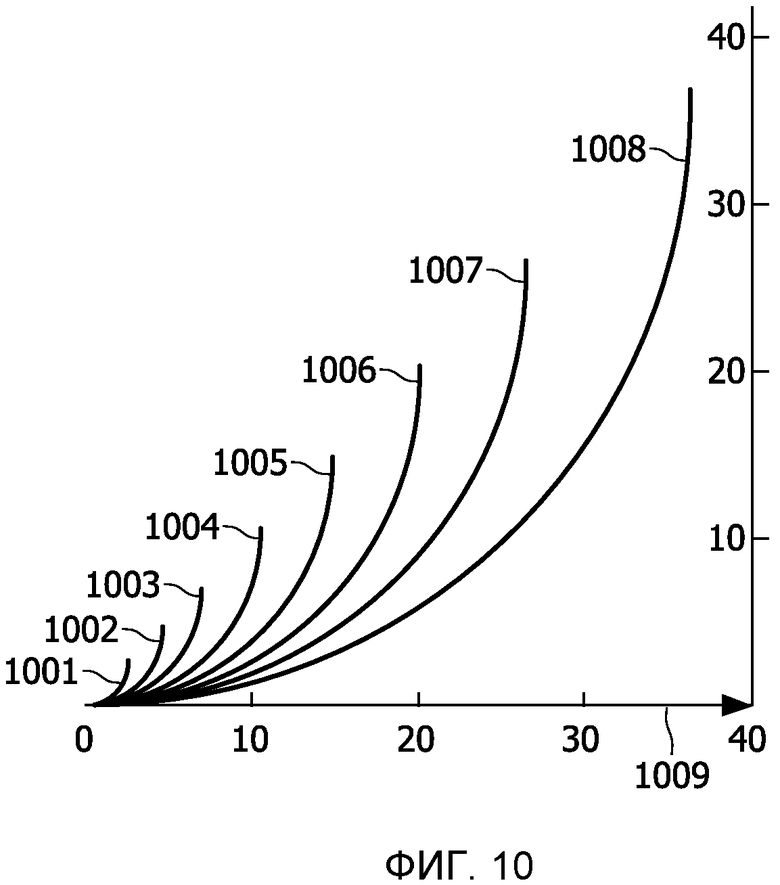
Фиг. 10 - изображения осевых линий набора криволинейных трубок.
Фиг. 11A - таблица радиусов и размеров трубок для трубок, представленных на фиг. 10.
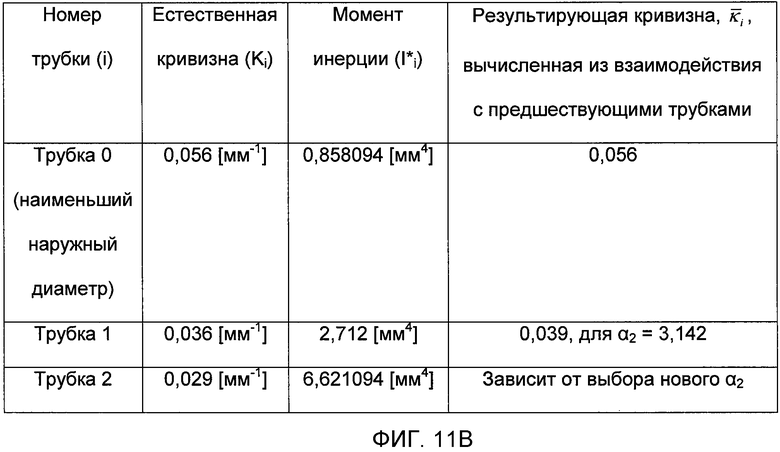
Фиг. 11B - таблица, представляющая вычисления результирующей кривизны.
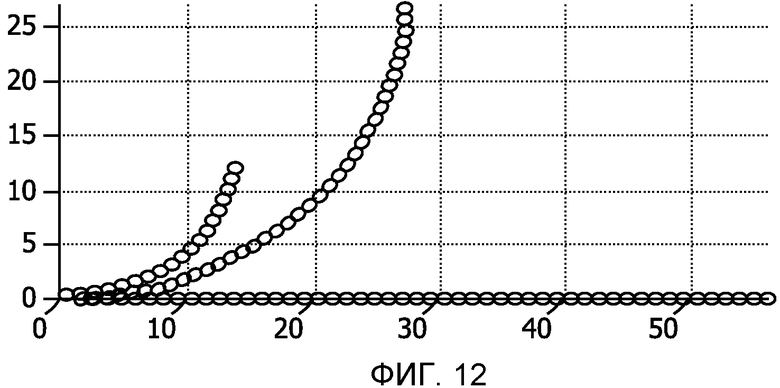
Фиг. 12 - изображение трех канюль с тремя возможными радиусами кривизны.
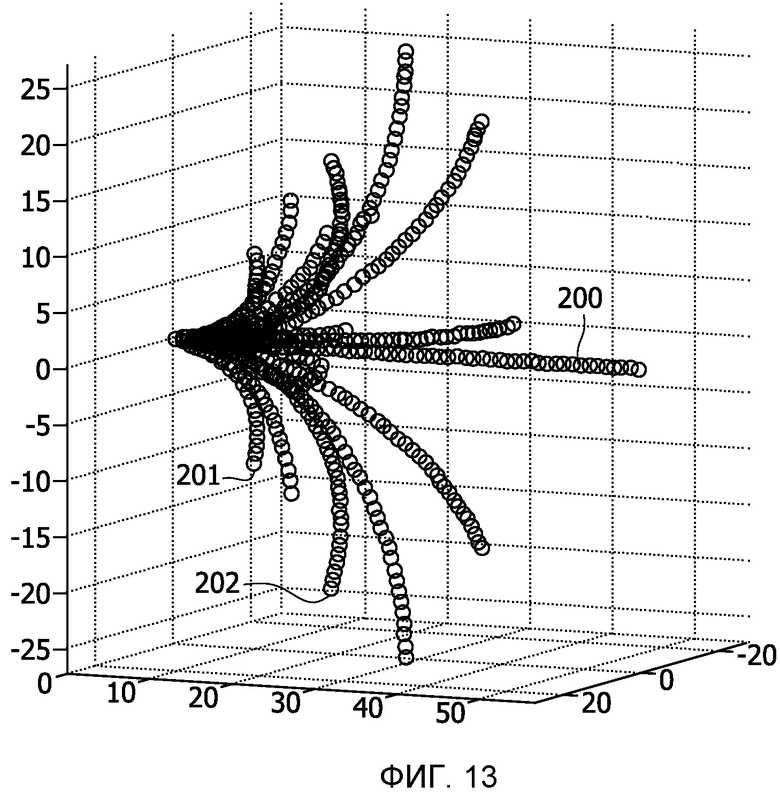
Фиг. 13 - изображение окрестности, получаемой в результате поворотов трех канюль, изображенных на фиг. 12.
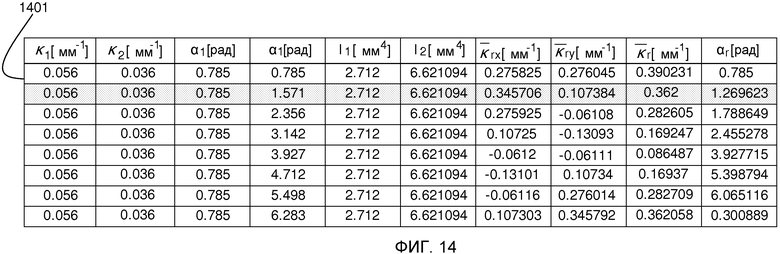
Фиг. 14 - таблица, представляющая примерные входные технические характеристики двух трубок, установленных с разными ориентациями, и примерные выходные технические характеристики результирующей кривизны, получаемой в результате каждой пары взаимодействий, совместно формирующих окрестность.
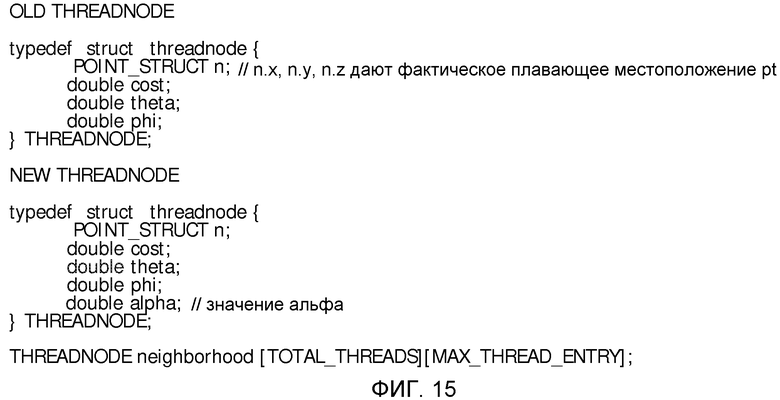
Фиг. 15 - управляющая программа для реализации элемента структуры данных окрестности.
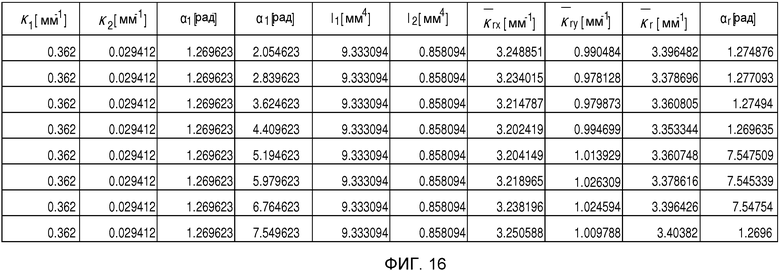
Фиг. 16 - таблица, представляющая примерные входные технические характеристики двух трубок, установленных с разными ориентациями, и примерные выходные технические характеристики результирующей кривизны, получаемой в результате каждой пары взаимодействий, совместно формирующих окрестность.
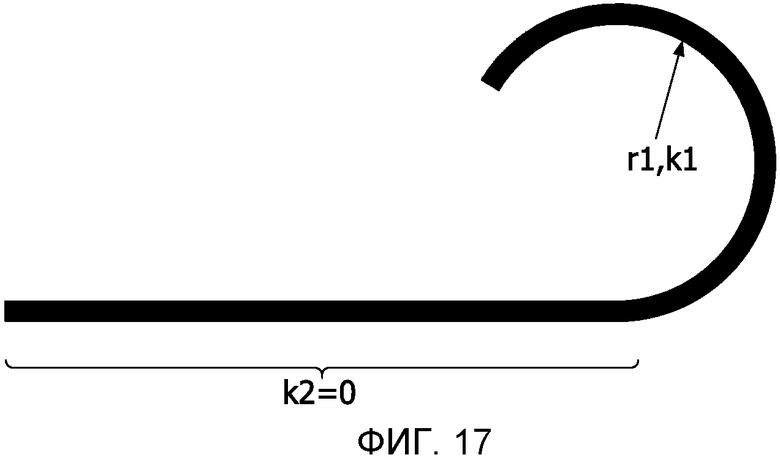
Фиг. 17 - схема одной трубки с по меньшей мере двумя значениями кривизны.
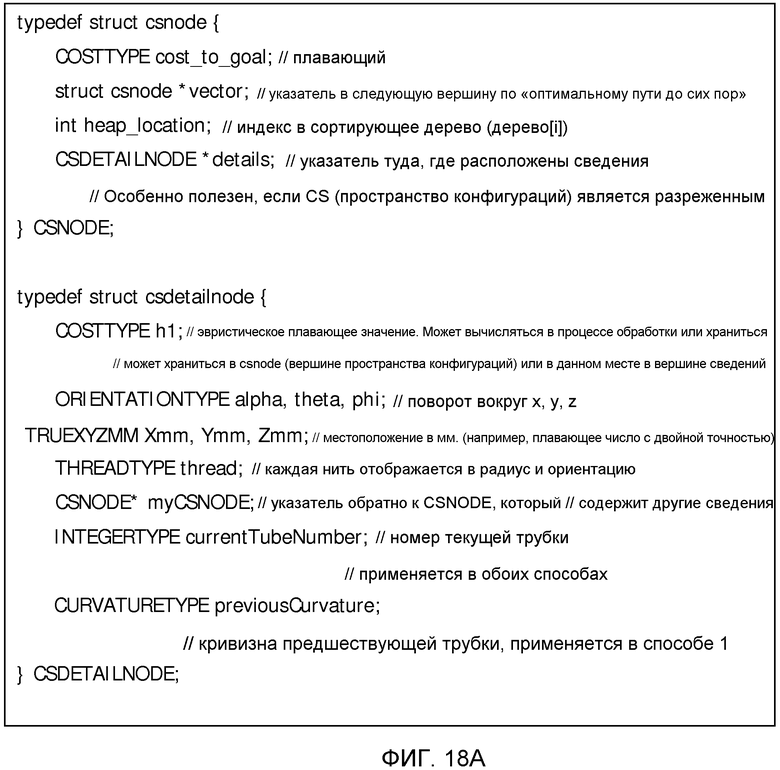
Фиг. 18A - примерная управляющая программа для реализации уточненных основных элементов структуры данных пространства конфигураций.
Фиг. 18B - таблица, представляющая примеры технических характеристик трубок.
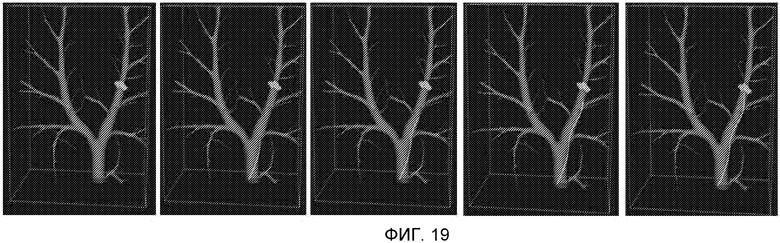
Фиг. 19 - последовательное отображение трубок по мере того, как трубки выдвигают одну из другой к объекту назначения.
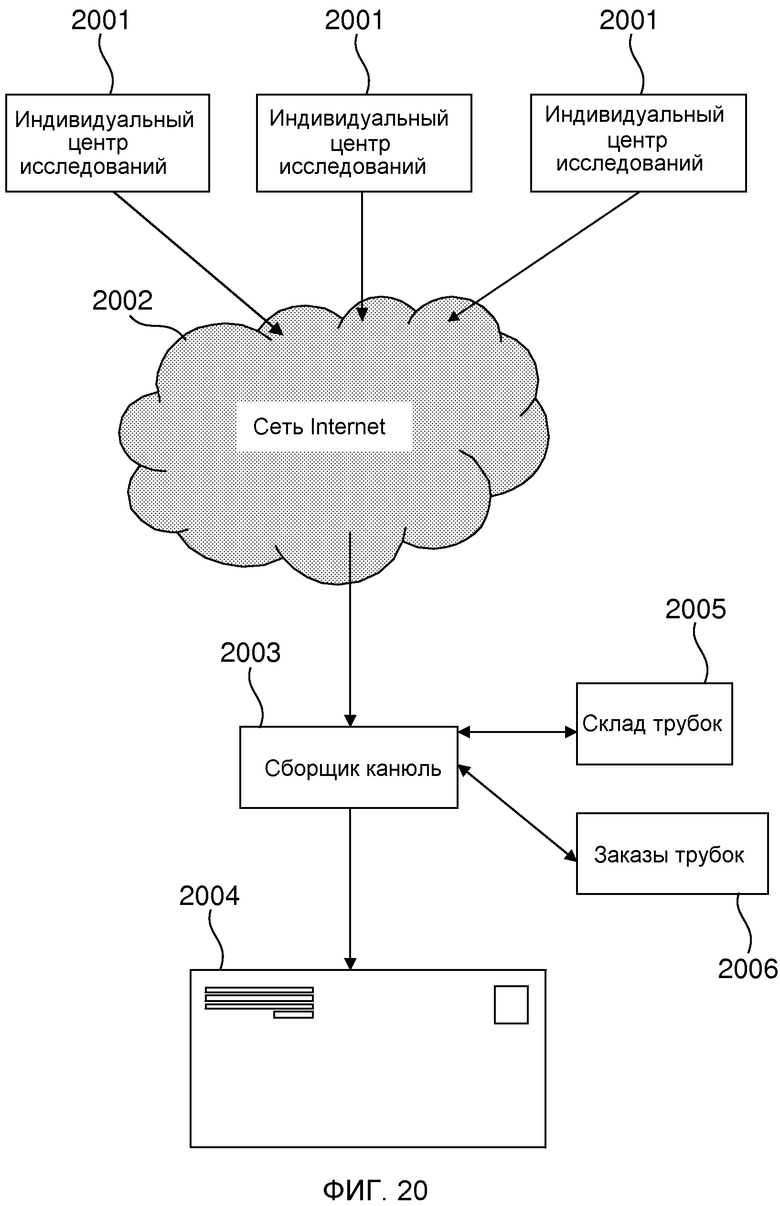
Фиг. 20 - схематическое представление способа изготовления.
В настоящем описании, термины «трубка» и «канюля» будут применяться равнозначно при упоминании компонентов подлежащего развертыванию устройства. Термины «цель» и «объект назначения» также будут применяться равнозначно.
Минимальная трубка в концентрическом наборе трубок будет центральной трубкой. Данная наименьшая трубка будет упоминаться также, в настоящем описании, как «наиболее дистальная» трубка, так как, при характерном применении, данная трубка может продолжаться дальше, чем другие трубки. Аналогично, наибольшая трубка в наборе находится снаружи концентрического набора и будет «наиболее проксимальной» трубкой. Приведенная терминология отражает факт, что, после того как трубки развернуты, максимальная трубка будет заканчиваться ближе всего к пункту введения. Минимальная трубка будет продолжаться от пункта введения, по всей траектории, до цели. Предполагается, что области применения изобретения содержат процедуры множества типов, в том числе визуализацию, химиотерапию, хемоэмболизацию, имплантацию радиоактивных зерен, фотодинамическую терапию, нейрохирургию, абляцию, лапароскопию, сосудистую хирургию и хирургию сердца. Концентрические канюли в соответствии с изобретением можно применить в других обстоятельствах, например при исследовании внутренней области сложной установки. Обобщенные варианты адаптивных окрестностей, описанных в настоящей заявке, могут найти применение в более широкой области робототехники.
При планировании устройства и траектории концентрических канюль желательно рассматривать большое число независимых факторов. Данные факторы содержат:
место предполагаемого выполнения процедуры или наблюдения, причем данное место известно также как объект назначения;
физическую структуру, содержащую свободное пространство и препятствия, которых следует избегать;
набор канюль, подлежащих развертыванию;
упругость каждой канюли;
момент инерции каждой канюли; и
радиус кривизны каждой канюли.
ВЗАИМОДЕЙСТВИЕ КАНЮЛЬ
Модель того, как канюли механически взаимодействуют между собой, приведена в статье Уэбстера с соавторами (R. J. Webster et al.), приведенной ниже в библиографии. В данной статье поясняется, что концентрические канюли имеют значения кривизны, которые получаются в результате сложных воздействий всех канюль.
Поскольку активные канюли поворачиваются одна относительно другой, то как их общая кривизна, так и плоскость кривизны изменяются. Поэтому, канюли выполняют два перемещения: перемещение наконечника и поперечное перемещение устройства. Выдвижение наконечника является искомой особенностью, а поперечное перемещение корпуса устройства может вызывать столкновение с препятствиями.
Один из методов планирования, при различных значениях упругости канюль, состоит в создании полной обратной кинематической модели. Данная модель может быть изящной, но может быть также сопряжена с проблемами обхода препятствий.
Другой метод состоит в выполнении вычислений, связанных с упругостью, после того как выполнено планирование траектории и набора телескопических канюль, для последующей коррекции. Данный метод описан в родственной заявке № 012139US1, поданной авторами настоящей заявки совместно с настоящей заявкой.
Третий метод заключается в использовании характеристик трубок, влияющих на кривизну, в виде составной части поискового алгоритма для планирования траектории по типу искусственного интеллекта. Примером данного метода является просмотр пространства конфигураций с использованием алгоритма A* (A звезды) и соответственно выбранной окрестности, например типа нижеописанной.
Описание набора концентрических канюль можно дать в форме n наборов {κ i , α i , I i}, где κ i означает кривизну i-го сегмента, α i означает угловую ориентацию i-й трубки относительно трубки i-1, и I i означает момент инерции поперечного сечения i-й трубки.
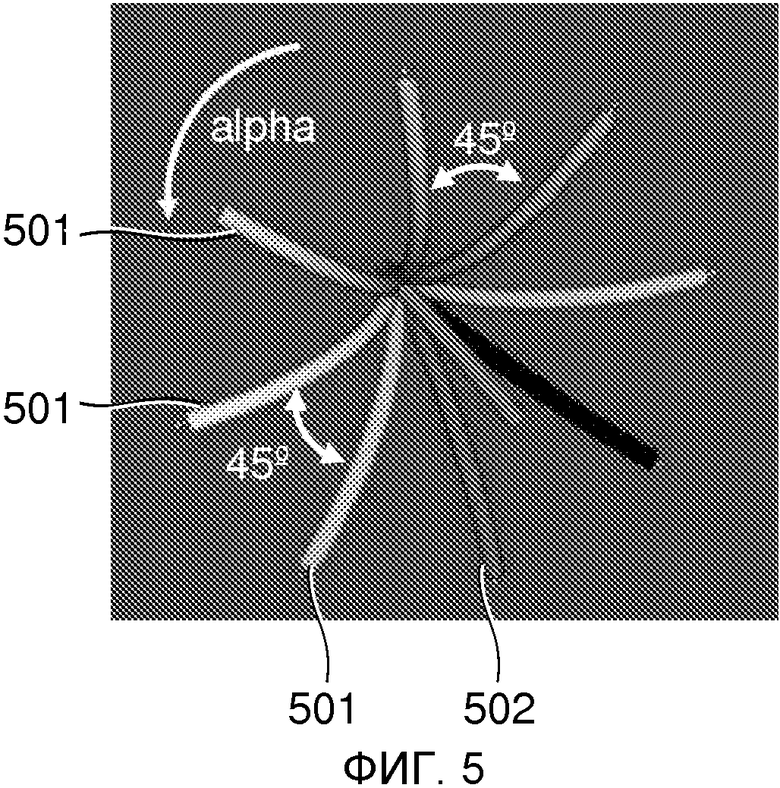
Некоторые примерные угловые ориентации изогнутых сегментов (иногда называемых нитями) обозначены позицией 501 на фиг. 5, вместе с прямолинейным сегментом 502 в центре. На фигуре каждое значение α i угла увеличивается на дополнительные 45 градусов, и, в данном случае, упомянутые углы равномерно делят полные 360 градусов на 8 равноотстоящих и симметричных кривых. Каждая трубка i показана как отмеряемая в направлении против часовой стрелки в плоскости фигуры. Выбранная дискретизация дает восемь разных углов в симметричном наборе, с углом 45° между соседними кривыми. Специалист может выбрать большее или меньшее число углов, то есть сколько необходимо при требуемом уровне точности, и, в альтернативном варианте, может выбрать углы с неравным расстоянием между ними. Большее число углов обеспечивает более точный план, но несколько повышает требования к объему памяти и усложняет вычисления. Специалист должен находить компромисс между упомянутыми факторами при выборе дискретизации. В предпочтительном варианте, угловая ориентация α i является фиксированной относительно предшествующей, т.е. проксимальной трубки. Фиксация гарантирует, что корпус устройства в целом не перемещается в поперечном направлении при развертывании, что обеспечивает отсутствие соприкосновения с препятствиями, называемое также исключением столкновений, и уменьшает повреждение тканей.
Ниже, дополнительно приведено описание фиг. 6, на которой показаны варианты выбора асимметричных ориентаций трубок. На фиг. 7 изображены развернутые концентрические канюли, имеющие различные «результирующие» значения кривизны, 
ВЫБОР КРИВИЗНЫ (
Трубка i может обеспечивать минимальный «радиус поворота» или, эквивалентно, максимальную кривизну Κi, где Ri=1/Ki, которая зависит от максимального значения деформации трубки. Упомянутая деформация является свойством материала. Желательно обеспечивать, чтобы трубки сохраняли свою способность упругого возвращения в свою первоначальную форму после того, как их выдвинули из охватывающей трубки, и обеспечивать возможность множественных манипуляций. Упомянутые факторы дополнительно уменьшают допустимую степень деформации. Достижимая кривизна является функцией наружного диаметра трубки и деформации. Как показано на фиг. 8, для трубки меньшего размера возможен меньший радиус поворота. Однако в предшествующих способах планирования предполагалось, что значения кривизны всех трубок соответствуют единственному «радиусу поворота» максимальной трубки. Данное предположение излишне ограничивало функциональные возможности канюль с меньшим диаметром.
На фиг. 8 представлены примеры минимального радиуса поворота, достижимого при разных деформациях с учетом наружного диаметра. Приведенные деформации являются типичными для нитинола. По горизонтальной оси отложены наружные диаметры трубок в мм, в диапазоне от 0,31 до 4,37. По вертикальной оси представлены наиболее напряженные (минимальные) возможные радиусы поворота. Вертикальная ось размечена в миллиметрах, в диапазоне от 0 до 50. Треугольные точки представляют радиус поворота в зависимости от наружного диаметра трубок, имеющих максимальную деформацию 0,05. Квадратные точки представляют радиусы поворота в зависимости от наружного диаметра трубок, имеющих максимальную деформацию 0,06. Ромбические точки представляют радиусы поворота в зависимости от наружного диаметра трубок, имеющих максимальную деформацию 0,08. По мере того как увеличивается наружный диаметр, радиус поворота также увеличивается.
В общем, максимальную кривизну, т.е. минимальный радиус кривизны, каждой трубки можно вычислить в соответствии со следующим уравнением:

где d
i означает наружный диаметр i-й трубки, ε
i означает деформацию i-й трубки (для всех трубок из одинакового материала, ε будет иметь одинаковое значение), 
На фиг. 9 показано исследование достижимости, проведенное на основе окрестности, например окрестности, показанной на фиг. 5, имеющей восемь криволинейных соседних элементов и один криволинейный соседний элемент. Предполагается, что криволинейный соседний элемент имеет фиксированный радиус поворота для трубок всех диаметров. По горизонтальной оси отложен выбранный радиус поворота в миллиметрах в диапазоне от 5 до 40. По вертикальной оси указана процентная часть всех достигаемых вокселей в дыхательных путях, в диапазоне от нуля до 100%. На данной фигуре выделены точки для 8-миллиметрового радиуса поворота, при котором можно достичь 99% модельных легких свиньи; 18-миллиметрового радиуса поворота, при котором можно достичь 93% легких свиньи, 28-миллиметрового радиуса поворота, при котором можно достичь 88% легких свиньи, и 38-миллиметрового радиуса поворота, при котором можно достичь только 85% легких свиньи. Изображения моделей легких, наложенные на кривую, показывают, как увеличение радиуса кривизны снижает доступность мелких структур в легких. Приведенные изображения служат иллюстрацией для каждой точки на графике.
С целью моделирования на основе компьютерной модели легких свиньи, диаметр трубки не рассматривали как ограничивающее условие с точки зрения столкновений. В ходе вычислений при планировании траектории, пока траектория проходила внутри легких, точку полагали теоретически «достижимой» для более широких трубок, при отсутствии проблемы с радиусом поворота.
Хотя моделирование влияния радиуса поворота на достижимость приведено для легких, тем не менее, полезные advantageous результаты можно получать для других областей тела, например сосудистой сети.
При такой настройке планировщика траектории в соответствии с патентными документами, включенными в заявку, чтобы использовать в качестве варианта выбора максимально крутую возможную кривизну для каждого размера трубки, можно планировать наборы концентрических канюль с большими функциональными возможностями. Однако кривизну i-й трубки можно выбирать так, чтобы получать любое значение в допустимом диапазоне 
На фиг. 10 представлены примерный набор кривых, которые продолжаются, пока конец не поворачивается под 90 градусов, а также прямолинейная нить, показанная на том же графике. Приведенные кривые указывают осевые линии трубок, но не указывают ни внутреннего, ни наружного диаметров. Показанные нити имеют примерные значения кривизны, зависящие от наружного диаметра, как видно из таблицы на фиг. 11, при этом прямолинейная нить имеет обозначение 1009. Выбранную кривую можно поворачивать вокруг X-оси для формирования набора взаимосвязанных вариантов выбора криволинейных нитей, которые могут быть представлены в структуре данных окрестности. На фигуре 12 представлен пример набора из трех вариантов выбора кривизны. На фиг. 13 показаны три кривые, повернутые под несколькими дискретными углами ориентации для создания схематического изображения окрестности вариантов выбора трубок.
Когда набор концентрических канюль собирают, номер канюли определяет крайний наружный диаметр трубки. Номеру трубки будет приписана конкретная кривизна трубки и ориентация, которая является следствием выбора соседнего элемента планировщиком.
АДАПТИВНАЯ ОКРЕСТНОСТЬ
«Адаптивная» окрестность представляет собой окрестность, которую можно изменять в зависимости от состояния в пространстве конфигураций. Упомянутые изменения будут, обычно, учитывать значения, связанные с по меньшей мере одним соседним состоянием, и, обычно, происходят в динамическом режиме во время распространения волн стоимости. В случае концентрических канюль, окрестность будет изменяться в зависимости от номера трубки, а также в зависимости от трубок, ранее осмотренных во время распространения волн стоимости.
Если две трубки с разными значениями кривизны повернуты под углом одна относительно другой, то следует рассмотреть их взаимодействие по углу и кривизне. Получаемая кривизна содержит две плоские составляющие. Обобщенная форма получаемой «результирующей кривизны» рассчитывается из упругого взаимодействия между двумя трубками и выражается в виде:


где α 1 и α 2 означают углы поворота вокруг опорной оси, κ1 и κ2 являются значениями кривизны трубок, и E 1 I 1 и E 2 I 2 означают произведения модуля Юнга и момента инерции для каждой трубки соответственно.
Итоговая кривизна (

с 


Во время развертывания, обычно будет иметь место взаимодействие между по меньшей мере двумя трубками, например тремя трубками с моментами I
i, I
i+1, I
i+2, значениями кривизны κ
i, κ
i+1, κ
i+2, и углами α
i, α
i+1, α
i+2, где i представляет крайнюю внешнюю трубку. Для упрощения вычисления, получаемую кривизну будут вычислять с использованием уравнения (1) и того факта, что две вложенные трубки (например i и i+1) работают как одна трубка, при взаимодействии с третьей трубкой. Две трубки имеют момент инерции I
1=I
i+I
i+1 и кривизну 
Если приведенную модель адаптивной окрестности применяют для вычисления нитей «окрестности допустимых перемещений» в предварительной заявке США № 60/725,185 (WO 2007/042986), то на каждом этапе распространения можно учитывать взаимодействие трубок по мере того, как распространяется алгоритм A* (A звезда). В предпочтительном варианте, распространение происходит от «исходного» местоположения, в которое будет выдвигаться минимальная трубка, обычно, к объекту назначения, и поэтому трубки можно складывать по уровням последовательно.
Для упрощения вычисления, описанного в настоящей заявке, будет принято, что все трубки изготовлены из одного и того же материала, и поэтому 




На фиг. 11B представлен пример использования 3 трубок с номерами 0, 1 и 2.
Трубка 0 является минимальной трубкой, имеющей минимальный наружный (OD), которая обычно контактирует с объектом назначения (исходным местоположением для поиска). Трубка 0 имеет радиус поворота 18 мм (кривизна = 0,056 мм-1) и угловую ориентацию 45° (0,7854 рад). Трубка 1 является следующей физической трубкой, которая имеет кривизну 0,036 mm-1 (радиус = 28 мм). Трубка 2 имеет кривизну 0,029 мм-1.
Из модели взаимодействия, заданной уравнением (1), для трубки 0 и трубки 1, можно вычислить результирующие взаимодействия для определения результирующих значений кривизны и углов. Результаты вычислений приведены в таблице на фиг. 14. Поэтому данная таблица является примером двух взаимодействующих трубок, где принято, что первая трубка установлена под некоторым углом, например, данный угол может быть углом трубки, ведущим от объекта назначения в текущее местоположение. Вторая трубка может быть расположена под любым из 8 разных углов, с продолжением, например, от конца первой трубки. Итоговым результатом их взаимодействия является результирующая окрестность, аналогичная окрестности, показанной на фиг. 6. Поэтому вместо симметричной окрестности, представленной на фиг. 5, результирующая окрестность является асимметричной, как по значениям кривизны, так и по углам, как показано на фиг. 6, и данная окрестность описывает траекторию, которая будет получена в результате взаимодействия трубок.
Асимметрию можно наблюдать в таблице на фиг. 14, в двух последних столбцах. Данную окрестность вычисляют не единственный раз, но следует повторно вычислять на каждом сегментном переходе, что типично для случая, когда открывается (расширяется) каждая новая вершина. Сегменты и сегментные переходы показаны на фиг. 7, где, для первой (минимальной) трубки с подстрочным индексом 0 (нуль), дугообразные нити в окрестности распределены равномерно на окружности 360° (например, каждая под углом 45° для окрестности с 8 дугами, показанной на фиг. 5). Поэтому угол поворота можно вычислять по индексу i дуги (альфа = (i-1)×45°, где i означает номер текущей нити). Адаптивную окрестность следует вычислять для каждой следующей трубки (подстрочные индексы от 1 до n-1). Ввиду сложности взаимодействия трубок, в окрестность, представленную на фиг. 14, добавлено значение угла.
На фиг. 15 представлена управляющая программа для реализации окрестности и элемента структуры данных. Следует отметить, что в ранее поданных заявках окрестность иногда называли «кистью» (так как окрестность внешне похожа на щетку).
В примере, показанном на фиг. 15, ранее предложенный способ, обозначенный «OLD THREADNODE», может использовать номер нити для получения угла (альфа), так как данный номер является первым индексом окрестности. В примере, показанном на фиг. 15, настоящий предложенный способ, обозначенный «NEW THREADNODE», в явном виде сохраняет вычисленное (результирующее) значение альфа, так как данное значение зависит от предшествующих трубок и будет служить для вычисления последующих взаимодействий трубок.
На фигуре 15, n представляет точку на окрестности, описываемую фактическим положением (например, x, y, z в мм), theta (тета) и phi (фи) являются ориентациями окрестности в пространстве координат пространства конфигураций, и alpha (альфа) является ориентацией нити окрестности относительно предшествующей трубки.
В окрестностях THREADNODE структуры данных окрестностей, значения переменных параметров alpha, n, cost, theta и phi изменяются по мере распространения алгоритма.
Однако взаимную ориентацию сегментов вложенных трубок следует сохранять, например, чтобы можно было использовать механизмы взаимной блокировки, как предложено в ранее поданной родственной предварительной заявке США № 61/106287, авторов Greenblatt et al, с датой подачи 17 октября 2008 г. Упомянутое условие гарантирует, что угол введения на одном конце трубки остается согласованно ориентированным по всей трубке. Если для взаимной блокировки применяется, например, шестигранный профиль, и трубки изогнуты вдоль плоских граней, то вторую трубку можно удобно фиксировать в любой из 6 возможных ориентаций. В таком случае, окрестность «результирующих нитей» можно вычислять на основе кривизны текущей трубки и взаимодействий с шестью дугообразными трубками и, по желанию, с прямолинейной трубкой.
Поэтому результирующую окрестность вычисляют на основе первой трубки и некоторого числа возможных ориентаций для физических трубок, подлежащих установке. Упомянутые ориентации могут быть распределены равномерно или могут быть неравномерно или избирательно сгруппированы в некоторых направлениях, в зависимости от прикладной задачи. Например, возможно, было бы целесообразно исключить трубки, которые ведут точно в противоположном направлении от текущей трубки.
Для получения равномерно распределенных углов, охватывающих полный поворот, что обеспечивает фиксированный дискретный угол между сегментами, вычисляют n нитей с номинальным углом 2π/n между ними. Однако, в предположении, что между трубками имеет место взаимодействие, получаемые углы 
Далее выполнено вычисление примерной адаптивной окрестности, с использованием вышеупомянутого набора трубок (трубки 0, трубки 1 и трубки 2), и в предположении, что трубки имеют поперечное сечение в виде восьмиугольника. Планировщик создает окрестность, когда «открывается» вершина с наименьшей стоимостью. В предлагаемом примере будет принято, что «оптимальная траектория до сих пор» следовала по дуге, обозначенной 1401 на фиг. 14. Следующую окрестность следует вычислять с использованием 8 равномерно распределенных углов, начиная с предшествующего угла. Пример того, как строить окрестность из сегмента, обозначенного затушеванным прямоугольником на фиг. 14, имеющего результирующего кривизну 0,039 мм-1 и имеющего результирующую ориентацию 1,48 радиан, приведен в таблице на фиг. 16. Результирующая кривизна 0,039 мм-1, представляющая общее (результирующее) взаимодействие трубки 0 и трубки 1, κr на фиг. 14, становится κ1 на фиг. 16. Полученная ориентация αr=1,480 на фиг. 14 становится α1 на фиг. 16. В приведенной таблице, α2 распределяется равномерно от α1 с шагом 
По мере того как алгоритм просматривает пространство возможных наборов трубок внутри пространства конфигураций, которое можно также считать пространством препятствий, окрестность адаптируется соответственно оптимальной последовательности трубок, использованной «до сих пор». При вычислении адаптивной последовательности, применяются предшествующая результирующая кривизна (0,039), предшествующий результирующий угол (1,48 радиан), предшествующий момент инерции, кривизна (0,029) следующей трубки и момент инерции следующей трубки, чтобы вычислить следующую адаптированную последовательность.
На фиг. 18A приведена примерная управляющая программа для реализации уточненных элементов структуры данных пространства конфигураций, подлежащих использованию в процессе учета характеристик, влияющих на кривизну, во время планирования траектории. Так как значения кривизны для каждого номера трубки (каждого размера трубки) известны до планирования, то кривизну «следующей трубки» можно определить с использованием номера трубки следующей трубки (currentTubeNumber, фиг. 18A) из поискового массива значений кривизны трубок. Следовательно, в предпочтительном варианте, структуру вершин, описанную в предварительной заявке США № 61/075886 и показанную на фиг. 4, расширяют посредством переменного параметра currentTubeNumber, как на фиг. 18A. Поскольку диаметры для каждого номера трубки известны до планирования, то момент инерции каждой трубки можно вычислить предварительно и сохранить в поисковом массиве.
Существуют два разных способа получения родительских параметров, т.е. кривизны 

Способ 1
В данном способе, структура вершины, описанная в предварительной заявке США № 61/075886 и показанная на фиг. 18A, дополнительно расширена с помощью переменного параметра previousCurvature. Всякий раз, когда «вершина» «совершенствуется», данный переменный параметр корректируется так, что сохраняет результирующую кривизну
Способ 2
В данном способе, кривизна предшествующего родительского элемента не сохраняется, а вычисляется «в процессе обработки». Взаимодействие вычисляется посредством выделения характеристик всех предшествующих трубок, начиная с указателя на родительский элемент, где указатель является переменным вектором, смотри фиг. 18A. Так как указатели можно применить для обратного прослеживания к исходному пункту, то можно найти физическую кривизну каждой трубки и поворот относительно предшествующей трубки:
α i=(thread-1)·2·π/(N-1),
где N означает число нитей в окрестности.
При итерационном применении уравнений 1 и 2 для каждого сегмента можно вычислить результирующую кривизну для достижения i-й вершины.
Данный способ не требует большего размера памяти, чем описано в предварительной заявке США № 61/075886. Время вычислений при каждом расширении равно O((N+currentTubeNumber-1)×t), что дает увеличение на O((currentTubeNumber-1)×t) для каждого расширения.
В некоторых случаях, возможно, удобнее изготавливать трубки, которые содержат как прямолинейный участок, так и криволинейный участок, как показано на фиг. 17. Данная примерная трубка содержит прямолинейный участок с кривизной K2=0 и криволинейный участок, имеющий радиус кривизны = 2 см или, эквивалентно, K1=0,5. Данную трубку можно рассматривать как две трубки в вышеприведенном вычислении, с наличием в каждой трубке одинаковых момента инерции и модуля Юнга, но с разными значениями кривизны. Кроме того, вычисление следует скорректировать, чтобы было видно, что данные «две» трубки не взаимодействуют между собой.
В типичных случаях, при сборке с по меньшей мере тремя трубками, самые внутренние трубки будут прекращать оказывать значительное влияние на суммарную кривизну устройства в зонах, где существует более 3 совпадающих трубок. Вычисление можно упростить применением порога при определении числа трубок, которые следует учитывать как вносящие вклад в результирующую кривизну. Порог одного типа может относиться к определению ситуации, в которой внутренняя трубка имеет момент инерции, процентное отношение которого к моменту инерции некоторой внешней трубки меньше некоторой величины. Одно из упомянутых предварительно заданных процентных отношений может составлять 10%. Другой порог может относиться к учету, в области совпадения, только предварительно заданного числа, например трех, внешних трубок.
Результатом предыдущих вычислений является описание набора трубок, обычно, в форме перечня трубок с последовательными номерами. Для каждой последовательно нумерованной трубки будут также указаны диаметр, кривизна, длина и ориентация: например, как показано на фиг. 18B.
Выходной результат может быть также в форме последовательного отображения или каких-нибудь других выходных графических данных. На фиг. 19 представлено упомянутое последовательное отображение, где последовательные кадры демонстрируют концентрическую канюлю, продвигающуюся в легких. Данное последовательное отображение может сопровождаться аудио или текстовыми инструкциями, имеющими отношение к характеристикам трубок и/или развертыванию трубок. Изготовитель, после получения описания, изготовит устройство, содержащее набор концентрических канюль. Канюли будут поставляться, предпочтительно, в воздухонепроницаемой стерильной упаковке и составленными с вровень расположенными дистальными концами. Развертывание будет осуществляться, предпочтительно, посредством введения сборного устройства и последующего выдвижения внутренних трубок в порядке, обратном диаметрам трубок, пока в сборном устройстве не сравняются все проксимальные концы трубок. Возможны другие порядки выдвижения, которые могут вызывать разные типы взаимодействий трубок.
На фиг. 20 схематически показано несколько индивидуальных центров 2001 исследования, обеспечивающих данные исследований по сети Internet 2002 для сборщика 2003 наборов канюль, который, в свою очередь, поставляет множество собранных наборов концентрических канюль 2004 в соответствующие клиники и больницы, где упомянутые наборы можно вводить в пациентов. В общем, планирование устройств концентрических канюль может начинаться с дискретного набора предварительно заказанных и хранящихся на складе трубок 2005. Данный дискретный набор сокращает производственные затраты благодаря уменьшению числа трубок, в частности числа специальных значений кривизны, которые изготовитель должен содержать на складе. Кроме того, трубки будет необходимо заказывать, как указано позицией 2006, с возможными изменениями по мере того, как потребуется вносить изменения в деятельность.
После прочтения настоящего описания специалистам в данной области техники будет очевидна возможность создания других модификаций. Такие модификации могут содержать другие признаки, которые уже известны в области проектирования, производства и применения медицинской робототехники и которые можно применять вместо или кроме признаков, уже описанных в настоящей заявке. Хотя формула изобретения в настоящей заявке составлена с использованием конкретных комбинаций признаков, следует понимать, что объем изобретения, предложенного в настоящей заявке, содержит также любой новый признак или новую комбинацию описанных здесь признаков, либо в явной, либо в неявной форме, либо любое их обобщение, независимо от того, решает ли это или нет какую-либо или все те же самые технические проблемы, которые решает настоящее изобретение. Заявители настоящим предупреждают, что во время ведения дела по настоящей заявке может быть составлена новая формула изобретения в отношении упомянутых признаков или по ним может быть создана любая дополнительная заявка.
Выражения «содержащий», «содержат» или «содержит», в контексте настоящей заявки, нельзя интерпретировать как исключающее дополнительные элементы. Единственное число, указанное артиклями единственного числа в настоящей заявке, нельзя интерпретировать как исключающее множество элементов. Союз «или» следует интерпретировать как включающий в себя или, иначе говоря, как сочетательный союз «и/или».
Библиография
DE 4223897 C2
US Pat. No. 6,572,593
R. J. Webster & N. J. Cowan, «Toward Active Cannulas: Miniature Snake-like Surgical Robots» 2006 IEEE/RSJ (Oct. 2006, Beijing, China) pp. 2857-2863
K. I. Trovato, A* Planning in Discrete Configuration Spaces of Autonomous Systems. (U. of Amsterdam 1996)
US 6,251,115
P Sears et al., «Inverse kinematics of concentric tube steerable needles», IEEE Conf. on Robotics and Automations, pp. 1887-1892 (2007)
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНФИГУРИРОВАНИЕ АКТИВНОЙ КАНЮЛИ ДЛЯ МИНИМАЛЬНО ИНВАЗИВНОЙ ХИРУРГИИ | 2007 |
|
RU2445934C2 |
| ТЕЛЕСКОПИЧЕСКАЯ КАНЮЛЯ С БЛОКИРОВКОЙ | 2009 |
|
RU2550659C2 |
| ПЛАНИРОВАНИЕ ТРАЕКТОРИИ ДЛЯ УМЕНЬШЕНИЯ ПОВРЕЖДЕНИЯ ТКАНЕЙ В ПРОЦЕССЕ МИНИМАЛЬНО ИНВАЗИВНОЙ ХИРУРГИИ | 2009 |
|
RU2596882C2 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ РАССЕЧЕНИЯ ХРУСТАЛИКОВОЙ ТКАНИ | 2017 |
|
RU2739878C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РАССЕЧЕНИЯ ХРУСТАЛИКА ГЛАЗА | 2017 |
|
RU2785416C2 |
| УСТРОЙСТВО ДЛЯ СУБРЕТИНАЛЬНОГО ВВЕДЕНИЯ ТЕРАПЕВТИЧЕСКОГО СРЕДСТВА ИЗОГНУТОЙ ИГЛОЙ | 2017 |
|
RU2740165C2 |
| ИНЪЕКЦИОННОЕ УСТРОЙСТВО ДЛЯ СУБРЕТИНАЛЬНОЙ ДОСТАВКИ ТЕРАПЕВТИЧЕСКОГО СРЕДСТВА | 2017 |
|
RU2740842C2 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ УДАЛЕНИЯ ХРУСТАЛИКОВОЙ ТКАНИ | 2015 |
|
RU2703694C2 |
| Способ определения радиуса кривизны | 1989 |
|
SU1656421A1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ ВВОДНОЙ ПОДУШКИ ДЛЯ СУБРЕТИНАЛЬНОЙ ДОСТАВКИ ТЕРАПЕВТИЧЕСКОГО СРЕДСТВА | 2017 |
|
RU2742971C2 |


Изобретение относится к области планирования введения концентрических канюль в тело. Техническим результатом является обеспечение перемещения активных канюль по запланированной траектории. Способ содержит: получение спецификации допустимых технических характеристик трубок; получение описания пространства, подлежащего исследованию устройством, причем описание содержит спецификации по меньшей мере одного начального пункта, по меньшей мере одного свободного пространства и/или по меньшей мере одного препятствия и по меньшей мере одного целевого пункта; выбор множества трубок таким образом, чтобы, когда трубки развертывают, они задавали по меньшей мере одну траекторию через пространство от начального пункта к цели по свободному пространству с обходом препятствий, причем упомянутый выбор соответствует набору и описанию и результат упомянутого выбора содержит: описание по меньшей мере одной последовательности трубок; по меньшей мере один радиус кривизны для каждой трубки; соответственную длину для каждой выбранной трубки и угловую ориентацию трубки относительно предшествующей трубки. 9 н. и 19 з.п. ф-лы, 22 ил.
1. Компьютерный способ разработки конфигурации устройства, при этом способ содержит выполнение операций в по меньшей мере одном устройстве обработки данных, причем операции содержат:
получение спецификации допустимых технических характеристик трубок, причем технические характеристики трубок содержат по меньшей мере одно обозначение диаметра и по меньшей мере один соответственный радиус кривизны для каждого диаметра, причем для по меньшей мере одной трубки соответственный радиус кривизны меньше, чем возможный радиус для по меньшей мере одной трубки большего диаметра;
получение описания пространства, подлежащего исследованию устройством, причем описание содержит спецификации
по меньшей мере одного начального пункта,
по меньшей мере одного свободного пространства и/или по меньшей мере одного препятствия, и
по меньшей мере одного целевого пункта;
выбор множества трубок таким образом, чтобы, когда трубки развертывают, они задавали по меньшей мере одну траекторию через пространство от начального пункта к цели по свободному пространству с обходом препятствий, причем упомянутый выбор соответствует набору и описанию и результат упомянутого выбора содержит:
описание по меньшей мере одной последовательности трубок;
по меньшей мере один радиус кривизны для каждой трубки;
соответственную длину для каждой выбранной трубки; и
угловую ориентацию трубки относительно предшествующей трубки.
2. Способ по п. 1, в котором по меньшей мере один из радиусов кривизны выбирают на основании радиуса максимально крутого возможного поворота для соответственного диаметра трубки.
3. Способ по п. 1, в котором спецификация соответствует дискретному набору трубок, с которыми, предположительно, работает предприятие-изготовитель.
4. Способ по п. 1, в котором
спецификация содержит машинно-считываемую структуру данных окрестности, реализованную на по меньшей мере одном носителе информации;
описание пространства содержит машинно-считываемую структуру данных пространства конфигураций, реализованную на носителе информации; и
выбор содержит применение алгоритма А* (А звезда) посредством распространения волн стоимости через пространство конфигураций соответственно окрестности.
5. Способ по п. 1, в котором результат выбора содержит последовательное отображение.
6. Компьютерный способ планирования набора концентрических трубок, при этом способ содержит выполнение операций в по меньшей мере одном устройстве обработки данных, причем операции содержат:
получение машинно-считываемого описания пространства, подлежащего исследованию, в форме машинно-считываемой структуры данных пространства конфигураций, реализованной на носителе информации и учитывающей по меньшей мере один начальный пункт, по меньшей мере один целевой пункт и по меньшей мере одно препятствие;
получение машинно-считываемой структуры данных адаптивной окрестности, реализованной на носителе информации и содержащей спецификацию множества трубок с разными диаметрами и по меньшей мере одну соответственную характеристику, влияющую на кривизну, соответствующую каждой трубке;
распространение волн стоимости от наиболее дистальной трубки к наиболее проксимальной трубке с использованием алгоритма А* (А звезда), структуры данных пространства конфигураций и структуры данных адаптивной окрестности, с обходом препятствия, причем упомянутое распространение содержит накопление воздействий отдельных трубок, так что результирующая кривизна набора соединяет воздействия по меньшей мере некоторых из соответственных характеристик, влияющих на кривизну; и
выдачу, соответственно алгоритму А*, описания набора трубок, подлежащего развертыванию для следования по траектории от начального пункта к цели, получающейся в результате распространения волн стоимости.
7. Способ по п. 6, в котором характеристика, влияющая на кривизну, является радиусом кривизны.
8. Способ по п. 6, в котором характеристика, влияющая на кривизну, является моментом инерции.
9. Способ по п. 6, в котором характеристика, влияющая на кривизну, является упругостью.
10. Способ по п. 6, в котором характеристика, влияющая на кривизну, является угловой ориентацией.
11. Способ по п. 6, в котором накопление содержит
сохранение результирующей кривизны в по меньшей мере одной вершине-состоянии пространства конфигураций; и
использование сохраненной результирующей кривизны при открытии следующей вершины-состояния после одной вершины-состояния.
12. Способ по п. 6, в котором накопление содержит
после открытия текущей вершины-состояния структуры данных пространства конфигураций поиск по меньшей мере одного значения, относящегося к по меньшей мере одной характеристике, влияющей на кривизну, соответствующей выбору по меньшей мере одной отдельной трубки, сделанному перед упомянутым открытием; и
соединение значения со значением, связанным с выбором текущей отдельной трубки.
13. Способ по п. 6, в котором структура данных окрестности содержит для по меньшей мере одной трубки асимметричные результирующие значения угловых ориентаций, которые накапливают воздействия характеристик, влияющих на кривизну, от по меньшей мере одной другой трубки.
14. Способ по п. 6, в котором структура данных окрестности является адаптивной в том смысле, что окрестность зависит от номера трубки и содержит для каждого номера трубки
по меньшей мере одно соответственное значение, соответствующее упругости и/или моменту инерции;
множество соответственных значений угловых ориентаций, которые являются симметричными для по меньшей мере одного номера трубки и асимметричными для по меньшей мере одного другого номера трубки; и
вариант выбора трубки, имеющей соответственный радиус поворота, соответствующий соответственному диаметру, из условия, чтобы радиус поворота был меньше, чем возможный радиус для более проксимальной трубки.
15. Способ по п. 6, в котором выходным результатом является последовательное отображение.
16. Компьютерный способ планирования набора концентрических трубок, содержащий выполнение операций в по меньшей мере одном устройстве (106) обработки данных, при этом способ содержит следующие этапы:
поддержку первой спецификации физического пространства выполнения задачи, предназначенного для введения;
поддержку второй спецификации набора трубок, подлежащих развертыванию в пространстве, причем вторая спецификация содержит указание по меньшей мере одной характеристики, влияющей на кривизну, для каждой трубки;
планирование конфигурации (108) концентрических трубок (109), соответствующей первой и второй спецификациям, с учетом взаимодействий между трубками (109), обусловленных характеристикой, влияющей на кривизну, причем конфигурация (108) указывает результирующую кривизну конфигурации; и
передачу конфигурации (108) в форме, на основании которой можно производить сборку концентрических трубок (109).
17. Способ по п. 16, в котором
первая спецификация содержит машинно-считываемую структуру данных пространства конфигураций, реализованную на носителе (107) информации,
вторая спецификация содержит машинно-считываемую структуру данных окрестности, реализованную на носителе (107) информации, и
планирование содержит применение алгоритма А* (А звезда) к пространству конфигураций соответственно окрестности, с учетом характеристики, влияющей на кривизну.
18. Способ по п. 17, в котором окрестность является адаптивной.
19. Сборное устройство из концентрических трубок, собранных в соответствии с результатами любого из способов по пп. 1-18 и подготовленных для развертывания в теле человека.
20. Носитель информации, считываемый устройством обработки данных и содержащий структуру данных, при этом структура данных является окрестностью для применения при планировании траектории для роботизированного устройства и/или его конфигурации, причем упомянутое планирование выполняется в сочетании с распространением волн стоимости с использованием алгоритма А* (А звезда) и структурой данных пространства конфигураций, причем окрестность содержит множество структур субданных, причем каждая структура субданных представляет возможный вариант выбора вдоль траектории и/или в конфигурации, и окрестность является адаптивной.
21. Носитель информации по п. 20, в котором по меньшей мере одно значение и/или одна структура субданных в структуре данных зависит от ранее выбранного варианта для траектории и/или конфигурации устройства.
22. Носитель информации по п. 20, в котором
планирование имеет целью создание конфигурации сборного устройства из концентрических канюль,
пространство конфигураций содержит спецификацию, соответствующую сканированию внутреннего участка тела, в который следует произвести развертывание,
каждая структура субданных содержит спецификацию трубки и соответственную характеристику данной трубки, влияющую на кривизну; и
окрестность адаптируют в сочетании с алгоритмом А* и пространством конфигураций для выдачи сборного устройства.
23. Система для конфигурации устройства, содержащая:
интерфейс для получения данных, относящихся к сканированию тела;
по меньшей мере один носитель информации для хранения программы и данных;
по меньшей мере один процессор для планирования набора концентрических канюль посредством выполнения операций, при этом операции содержат
получение спецификации допустимых технических характеристик трубок, причем технические характеристики трубок содержат по меньшей мере одно обозначение диаметра и по меньшей мере один соответственный радиус кривизны для каждого диаметра, причем для по меньшей мере одной трубки соответственный радиус кривизны меньше, чем возможный радиус для по меньшей мере одной трубки большего диаметра;
получение описания пространства, подлежащего исследованию устройством, причем описание содержит спецификации по меньшей мере одного начального пункта,
по меньшей мере одного свободного пространства и/или по меньшей мере одного препятствия, и
по меньшей мере одного целевого пункта;
выбор множества трубок таким образом, чтобы, когда трубки развертывают, они задавали по меньшей мере одну траекторию через пространство от начального пункта к цели по свободному пространству и обходили препятствия, причем упомянутый выбор соответствует набору и описанию и результат упомянутого выбора содержит:
описание по меньшей мере одной последовательности трубок;
по меньшей мере один радиус кривизны для каждой трубки;
соответственную длину для каждой выбранной трубки; и
угловую ориентацию трубки относительно предшествующей трубки; и
интерфейс для обеспечения описания телескопических канюль соответственно планированию.
24. Система для планирования набора концентрических трубок, содержащая:
интерфейс для получения данных, относящихся к сканированию тела;
по меньшей мере один носитель информации для хранения программы и данных;
по меньшей мере один процессор для планирования набора концентрических канюль посредством выполнения операций, при этом операции содержат
получение машинно-считываемого описания пространства, подлежащего исследованию, в форме машинно-считываемой структуры данных пространства конфигураций, реализованной на носителе информации и учитывающей по меньшей мере один начальный пункт, по меньшей мере один целевой пункт и по меньшей мере одно препятствие;
получение машинно-считываемой структуры данных адаптивной окрестности, реализованной на носителе информации и содержащей спецификацию множества трубок с разными диаметрами и по меньшей мере одну соответственную характеристику, влияющую на кривизну, соответствующую каждой трубке;
распространение волн стоимости от наиболее дистальной трубки к наиболее проксимальной трубке, с использованием алгоритма А* (А звезда), структуры данных пространства конфигураций и структуры данных адаптивной окрестности, с обходом препятствия, причем упомянутое распространение содержит накопление воздействий отдельных трубок, так что результирующая кривизна набора соединяет воздействия по меньшей мере некоторых из соответственных характеристик, влияющих на кривизну; и
выдачу, соответственно алгоритму А*, описания набора трубок, подлежащего развертыванию для следования по траектории от начального пункта к цели, получающейся в результате распространения волн стоимости;
интерфейс для обеспечения описания телескопических канюль соответственно планированию.
25. Система для планирования набора концентрических трубок, содержащая:
интерфейс для получения данных, относящихся к сканированию тела;
по меньшей мере один носитель информации для хранения программы и данных;
по меньшей мере один процессор для планирования набора концентрических канюль посредством выполнения операций, при этом операции содержат
поддержку первой спецификации физического пространства выполнения задачи, предназначенного для введения;
поддержку второй спецификации набора трубок, подлежащих развертыванию в пространстве, причем вторая спецификация содержит указание по меньшей мере одной характеристики, влияющей на кривизну, для каждой трубки;
планирование конфигурации концентрических трубок, соответствующей первой и второй спецификациям, при одновременном учете взаимодействий между трубками, обусловленных характеристикой, влияющей на кривизну, причем конфигурация указывает результирующую кривизну конфигурации; и
передачу конфигурации в форме, на основании которой можно производить сборку концентрических трубок;
интерфейс для обеспечения описания телескопических канюль соответственно планированию.
26. Развертываемый набор концентрических канюль, при этом набор содержит множество трубок, каждая трубка задана параметрами, содержащими диаметр, длину и радиус поворота и по меньшей мере одна из множества трубок имеет соответственный радиус поворота, который меньше, чем возможный радиус для трубки большего диаметра.
27. Набор концентрических канюль по п. 26, в котором соответственный радиус поворота имеет минимальное возможное значение с учетом максимальной деформации одной трубки.
28. Набор концентрических канюль по п. 26, в котором по меньшей мере первая и вторая трубки не являются прямолинейными и имеют первый и второй радиусы кривизны соответственно, при этом первый и второй радиусы кривизны не равны.
| WO2008032230 A1, 20.03.2008 | |||
| WO2007042986 A2, 19.04.2007 | |||
| WO2007059233 A2, 24.05.2007 | |||
| US20080103519 A1, 01.05.2008 | |||
| СОСУДИСТАЯ КАНЮЛЯ | 2002 |
|
RU2233632C1 |

