Настоящее изобретение относится к способу и системе вычисления траектории минимально инвазивного устройства для достижения намеченного объекта, с обходом критических структур и минимизацией повреждения структур. Эту траекторию можно применять либо для управления устройством (например, бронхоскопом или конической иглой), либо можно применять для составления устройства (например, телескопической канюли).
Применения такого планирования траектории можно практически осуществить с использованием концепции, изложенной в работе Karen I. Trovato, A* Planning in Discrete Configuration Spaces of Autonomous System, University of Amsterdam, 1996.
В частности, применение планирования траектории можно охарактеризовать набором ключевых параметров. Каждый параметр имеет один или более диапазонов изменения действительных значений параметра, которые дискретизируются для упрощения компьютерного вычисления. Сочетание всех возможных диапазонов изменения параметров называется пространством конфигураций, и каждое состояние пространства конфигураций обеспечивает однозначную установку для каждого из упомянутых параметров. Поскольку пространство конфигураций является дискретизированным пространством, то каждое состояние пространства конфигураций можно считать «вершиной» N-мерного графа (часто N=2 или 3, но, иногда, намного больше). Термины «состояние» и «вершина» являются равнозначными в настоящем описании.
Окрестность охватывает набор потенциальных переходов на основании основных возможностей системы или устройства, обычно, в пределах некоторого диапазона. Переход из одного состояния в пространстве конфигураций в другое «соседнее» состояние может быть вызван некоторым событием или физическим перемещением. «Соседние вершины» можно также определять на основании физических процессов или «правил игры». Так, окрестность может содержать все позиции коня в пределах одного хода на пустой шахматной доске.
Каждому переходу присваивается стоимость изменения между «начальным» состоянием и соседним состоянием. Поэтому, сочетание состояний в пространстве конфигураций с переходами окрестности между упомянутыми состояниями можно представить в виде графа с состояниями в качестве вершин и переходами в качестве направленных ребер, взвешенных по стоимости.
В отношении многих применений планирования траектории действуют ограничения, которые определяют недопустимые состояния, часто, из-за медицинских ограничений, взаимодействий с препятствиями или налагаемых правил. Так, возможно существование идентифицируемой(ых) запрещенной(ых) области(ей) вершин в пространстве конфигураций. Это может быть достигнуто многими способами. Например, можно отбросить переходы в запрещенную вершину конфигурации, указывающие на недопустимое передвижение. Альтернативно, вершины можно пометить как недопустимые, или переходы в вершину могут иметь бесконечную (недостижимую и высокую) стоимость, обозначенную символом ∝. Каждый метод вынуждает траекторию обходить препятствия.
Недопустимые состояния оказывают также воздействие далее по ходу. Например, окрестность передвижений для автомобиля может быть дугой движения вперед на четверть поворота. Если состояние вдоль кривой заблокировано углом (препятствием), то запрещен не только переход в угол, но также запрещены переходы за угол.
«Целевое» (или намеченное) положение можно отобразить в одной или более эквивалентных «целевых» вершин в дискретизированном пространстве конфигураций. Возможно существование нескольких «целевых» вершин, так как формулирование параметров, отражающих систему, может иметь больше, чем одно решение, описывающее «целевое положение» системы. Например, как левая, так и правая конфигурации руки могут достигать одного местоположения. «Начало» системы просто трансформируется в конкретную начальную вершину, которая часто является текущим состоянием (т.е. статусом) системы или устройства.
Поиск наиболее желательной последовательности событий, ведущих из текущей вершины (начала) системы к искомому «целевому положению», аналогичен поиску оптимальной траектории из текущей вершины к «целевой» вершине, с сопряженной минимальной стоимостью и одновременным обходом всех недопустимых вершин. Предполагается также, что траекторию можно вычислить либо от начала к целевому положению, либо от целевого положения к началу. В обоих случаях, соединение переходов формирует получаемую траекторию. Планирование траектории часто имеет критерий благоприятного исхода, называемый изменяющейся пространственной метрикой, стоимостной метрикой или целевой функцией (например, с наибольшей скоростью, кратчайший, с наименьшей стоимостью, и т.п.). Поэтому, искомая последовательность событий может быть найдена планированием траектории с использованием вершин пространства конфигураций, окрестности переходов, стоимостей, запрещенных областей и «целевого положения» и заданием или установкой «начальной вершины». Способ поиска по графу, например, поиск A*, обеспечивает эффективный механизм определения оптимальной траектории.
Как дополнительно поясняется в настоящем описании, настоящее изобретение обеспечивает метрику (меру) количественной оценки структурных повреждений и геометрическое расширение намеченной вершины, которое расширяет использование вышеупомянутой концепции, предложенной Тровато (Trovato). Например, на основании оптимальной траектории устройства, которая минимизирует повреждение критических структур во время минимально инвазивного хирургического вмешательства, можно вычислить кинематически допустимый набор телескопических канюль.
Одним вариантом настоящего изобретения является способ планирования траектории в соответствии с хирургическим применением, содержащий метод оценки структурных повреждений. Способ содержит составление структуры пространства конфигураций на носителе данных, при этом структура пространства конфигураций представляет дискретизированное пространство конфигураций анатомической области тела, включая вершины конфигурации в свободном пространстве и запрещенные вершины конфигураций. Способ дополнительно содержит формирование оценки структурных повреждений для каждой вершины конфигурации в свободном пространстве, при этом оценка структурных повреждений характеризует оценку повреждений для потенциальных повреждений одного или нескольких анатомических участков анатомической области, представленных запрещенной(ными) вершиной(ами) конфигурации, имеющими бесконечную стоимость структурной оценки.
Во втором варианте настоящего изобретения, способ планирования содержит метод геометрического расширения. В частности, способ дополнительно содержит дополнение структуры вершин пространства конфигураций, составленной на носителе данных, значениями параметров, количественно оценивающих каждую вершину структуры вершин пространства конфигураций, при этом дополнение структуры вершин пространства конфигураций содержит геометрическое расширение намеченной вершины, содержащее одну или более вершин конфигурации в свободном пространстве, геометрически смежную с намеченной вершиной, выполняющую функцию замещающей начальной вершины.
Вышеприведенные варианты и другие варианты настоящего изобретения, а также различные признаки и преимущества настоящего изобретения будут более ясны из нижеследующего подробного описания различных вариантов осуществления настоящего изобретения, при его рассмотрении в связи с прилагаемыми чертежами. Подробное описание и чертежи служат только для пояснения, а не ограничения настоящего изобретения, при этом объем настоящего изобретения определяется прилагаемой формулой изобретения и ее эквивалентами.
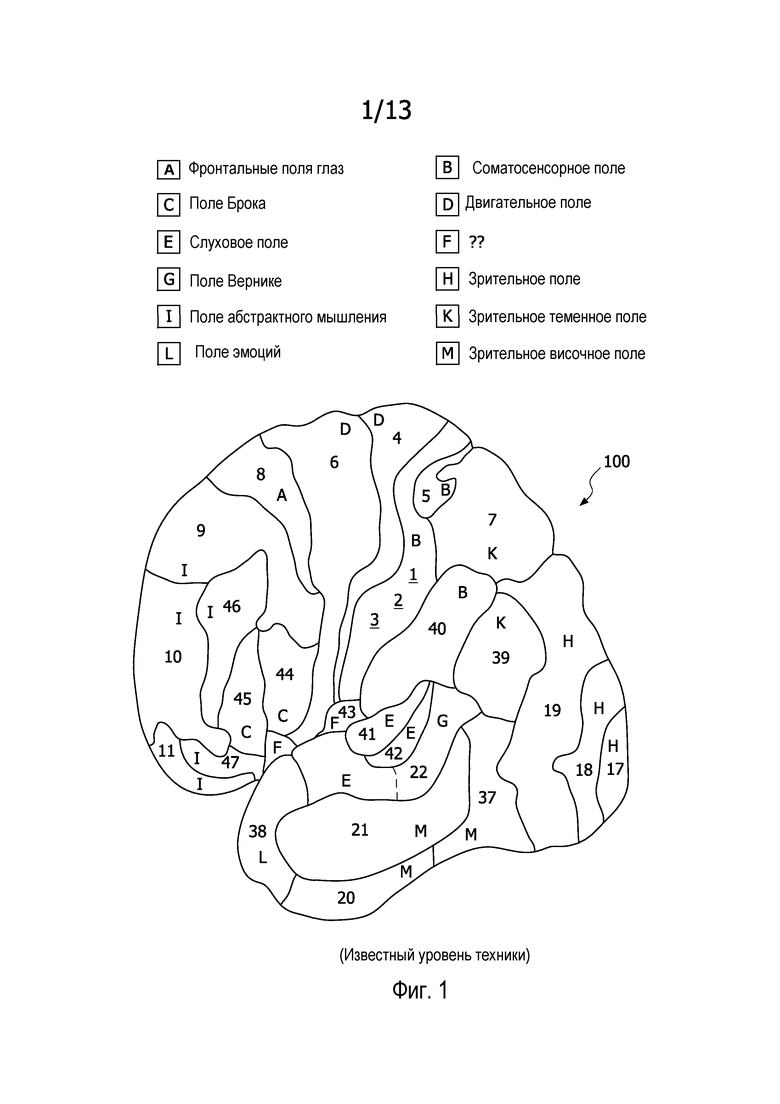
Фиг.1 иллюстрирует примерные известные в области техники поля Бродманна головного мозга.
Фиг.2 иллюстрирует пример известной в области техники неголономной окрестности для телескопической канюли.
Фиг.3 иллюстрирует блок-схему метода оценки повреждения критических структур и метода геометрического расширения намеченной вершины в соответствии с настоящим изобретением.
Фиг.4 иллюстрирует блок-схему последовательности операций способа планирования траектории в соответствии с настоящим изобретением.
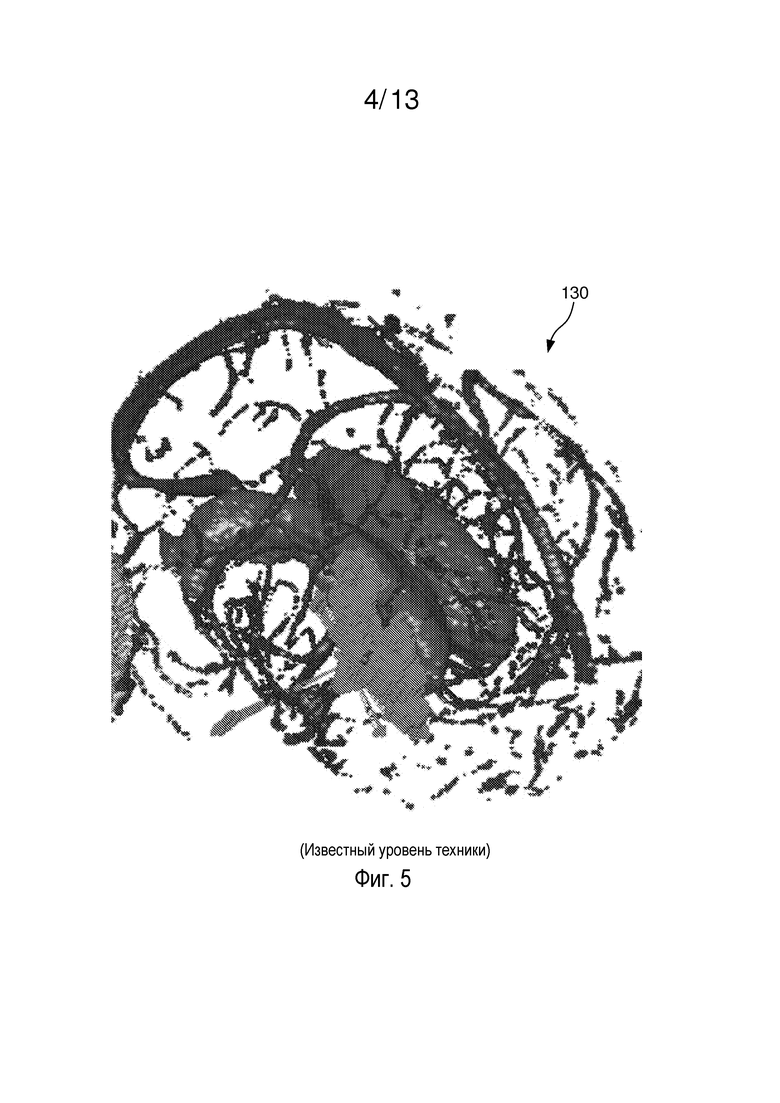
Фиг.5 иллюстрирует примеры известных из уровня техники сосудистой системы головного мозга и желудочков.
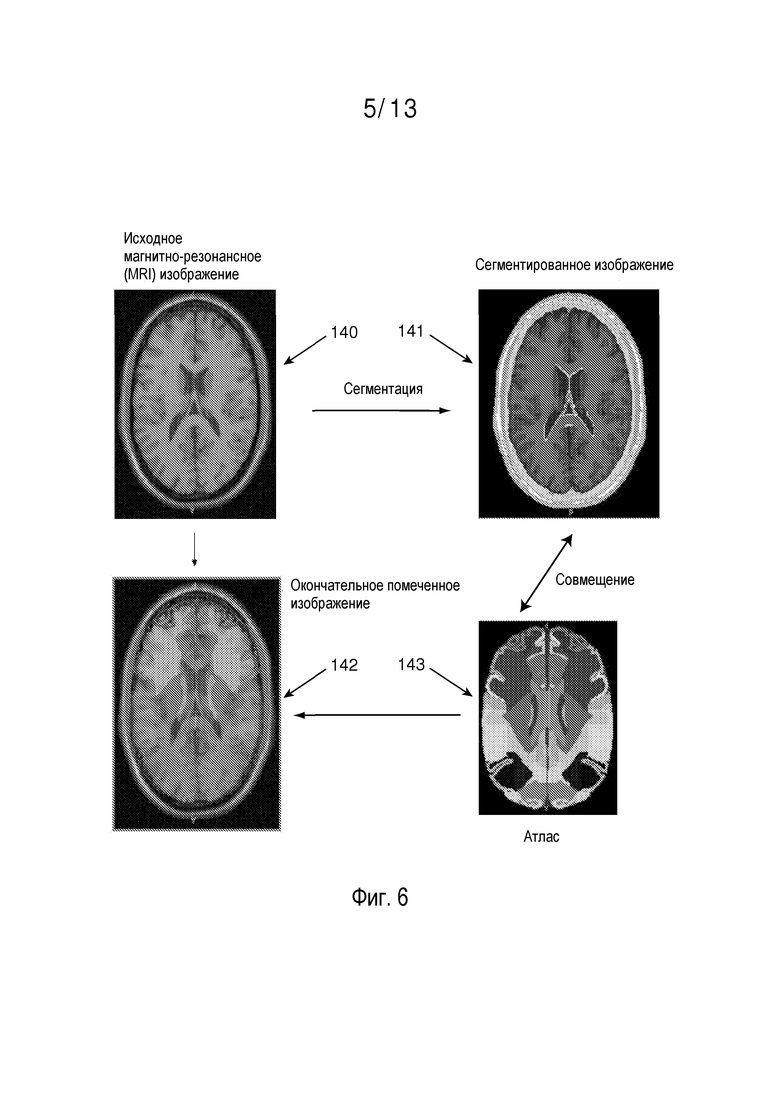
Фиг.6 иллюстрирует пример обнаружения критических структур в головном мозге в соответствии с настоящим изобретением.
Фиг.7 иллюстрирует блок-схему последовательности операций способа вычисления весовых коэффициентов в соответствии с настоящим изобретением.
Фиг.8 иллюстрирует пример шкалы весовых коэффициентов в соответствии с настоящим изобретением.
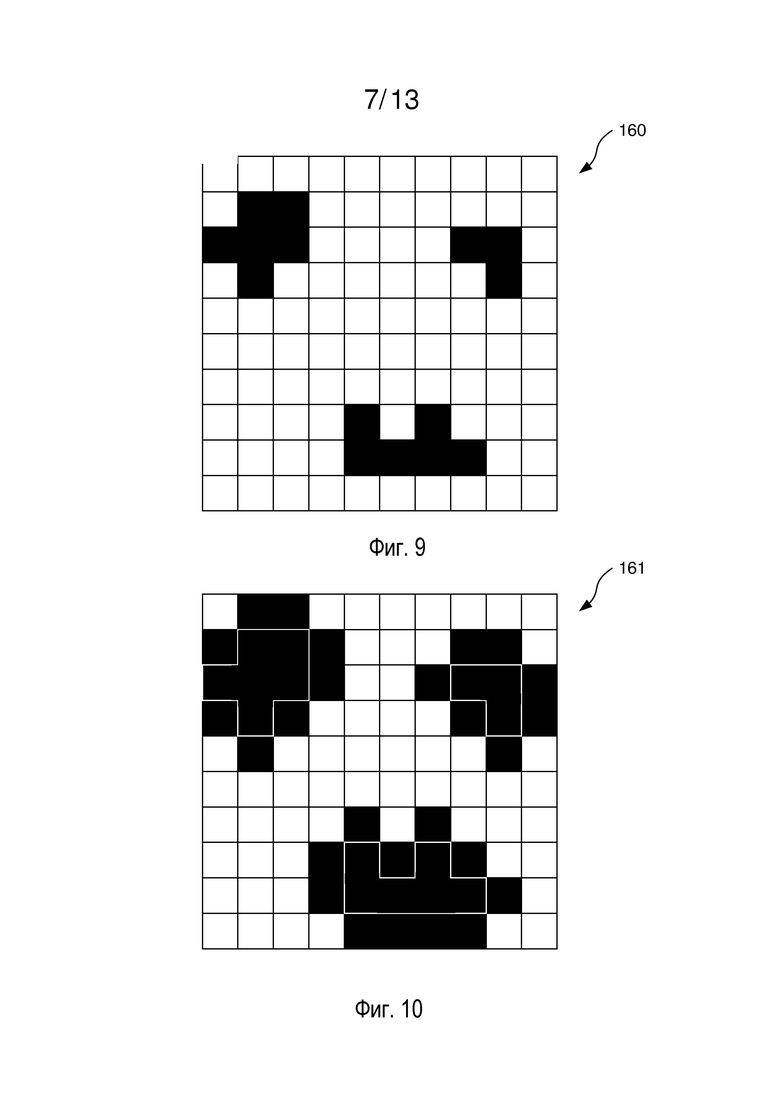
Фиг.9 иллюстрирует пример карты препятствий в соответствии с настоящим изобретением.
Фиг.10 иллюстрирует пример карты расширенных препятствий в соответствии с настоящим изобретением.
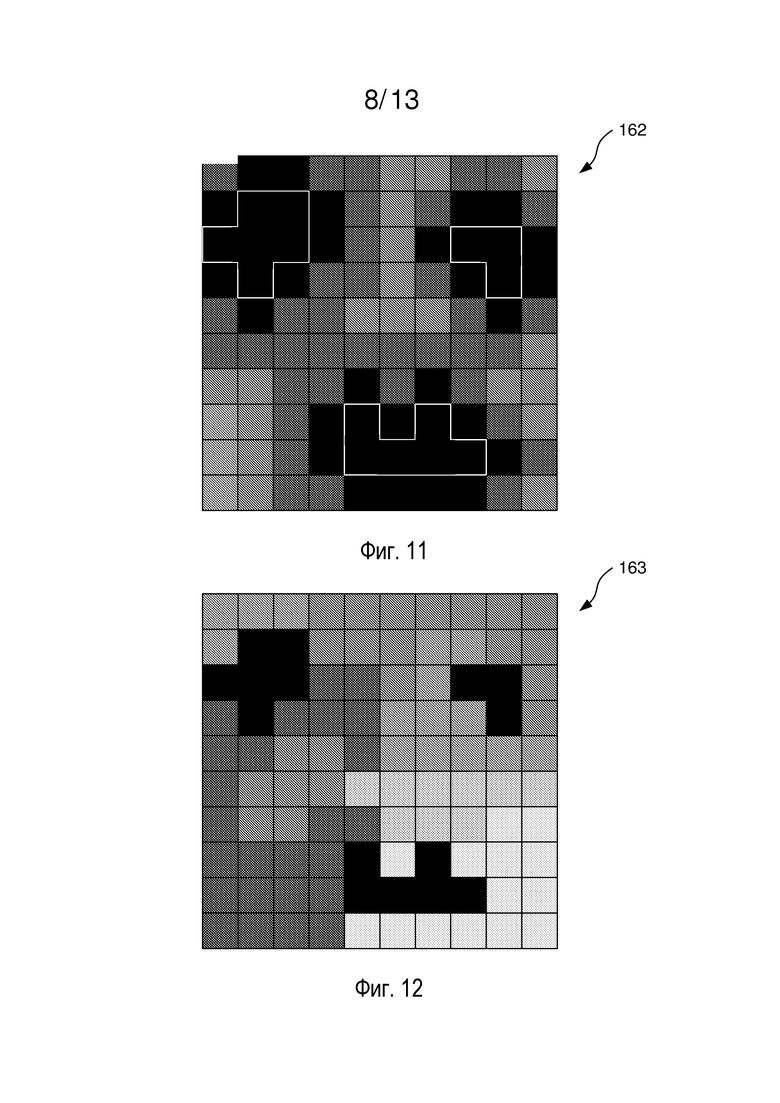
Фиг.11 иллюстрирует пример карты расстояний до препятствий в соответствии с настоящим изобретением.
Фиг.12 иллюстрирует пример эмпирической взвешенной карты в соответствии с настоящим изобретением.
Фиг.13 иллюстрирует пример карты оценки структурных повреждений в соответствии с настоящим изобретением.
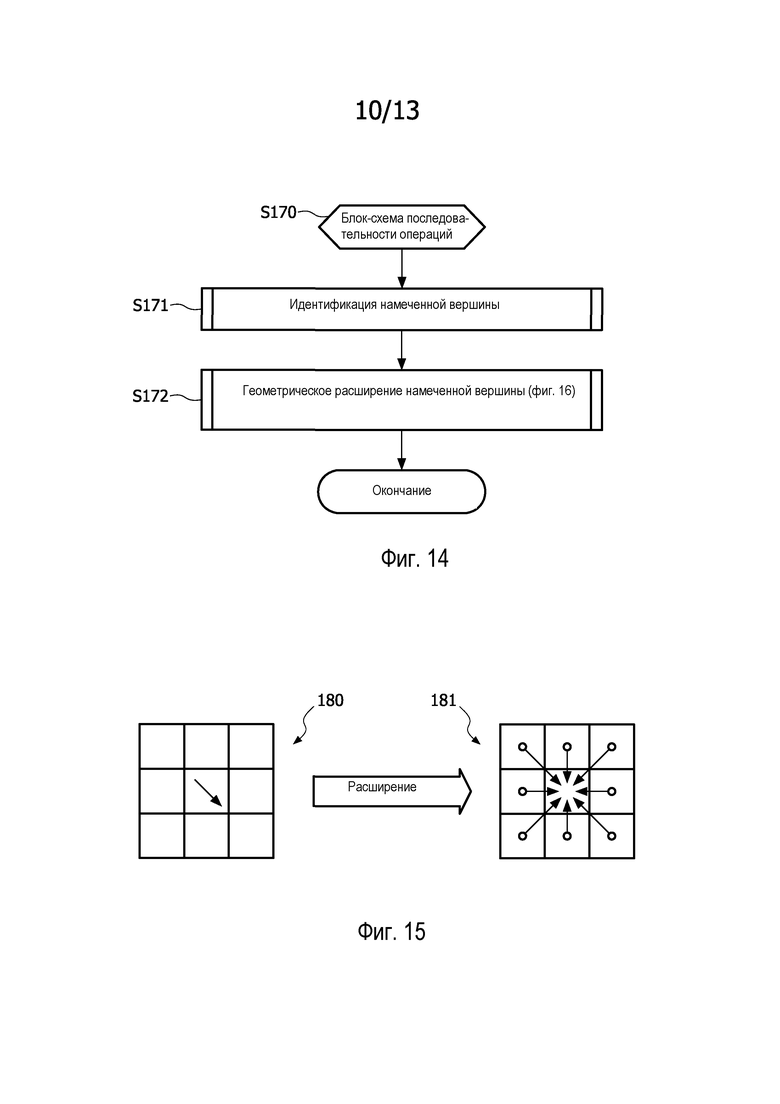
Фиг.14 иллюстрирует блок-схему последовательности операций способа геометрического расширения намеченной вершины в соответствии с настоящим изобретением.
Фиг.15 иллюстрирует пример двумерного геометрического расширения намеченной вершины в соответствии с настоящим изобретением.
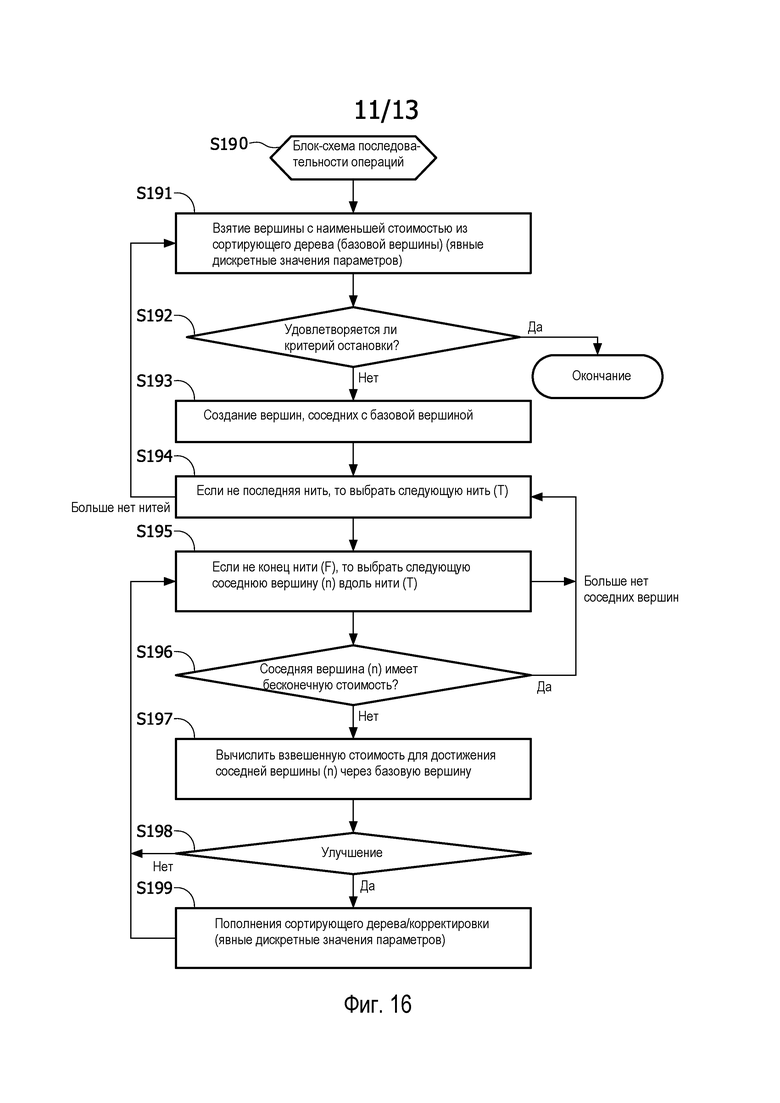
Фиг.16 иллюстрирует блок-схему последовательности операций характерного алгоритма поиска A* для определения оптимальной траектории из «начальной» вершины к «целевому положению», с использованием параметров состояния в соответствии с настоящим изобретением.
Фиг.17 иллюстрирует примерный набор «безопасных» точек ввода для известной из уровня техники биопсии головного мозга.
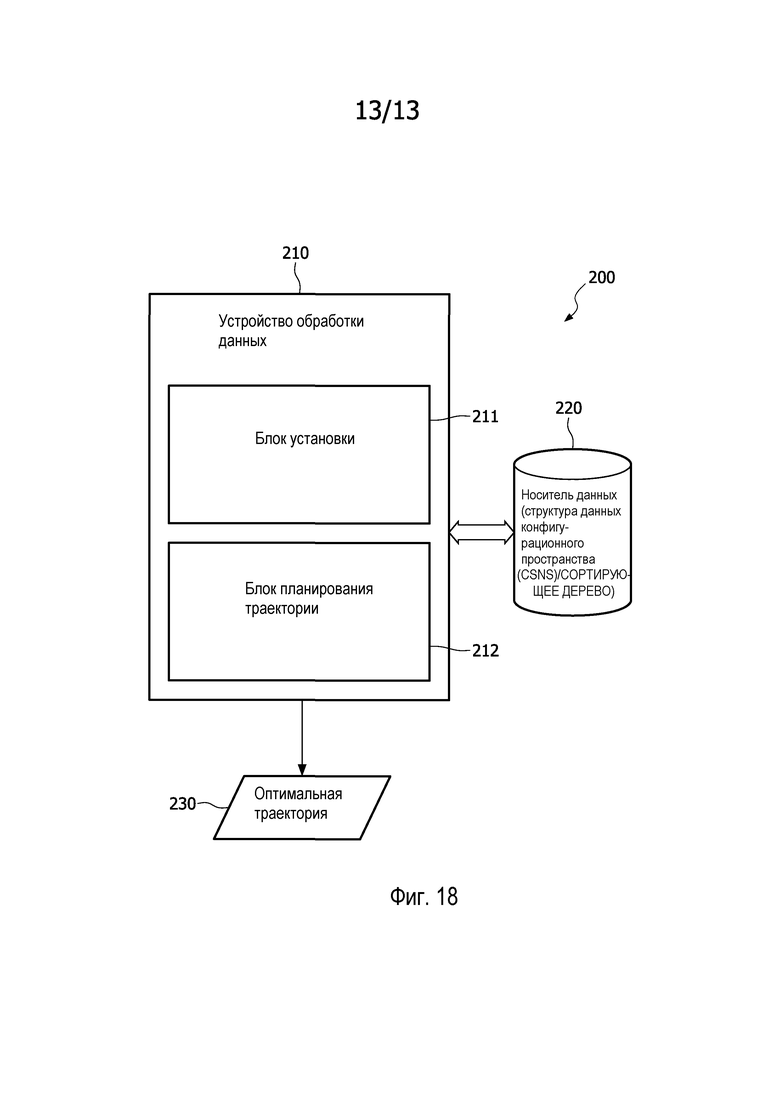
Фиг.18 иллюстрирует блок-схему системы в соответствии с настоящим изобретением.
Настоящее изобретение основано на трех (3) базовых принципах изобретения.
Во-первых, дискретизированное пространство конфигураций при применении планирования траектории, связанном с минимально инвазивными хирургическими вмешательствами, можно усовершенствовать путем создания «оценки структурных повреждений», которая обеспечивает оценку стоимости или потери, накопленные при пересечении конкретных анатомических участков (например, критических анатомических структур в пределах анатомической области и уязвимых точек ввода в анатомическую область). Упомянутую оценку можно сохранять в самом пространстве конфигураций или, в предпочтительном варианте, сохранять в отдельной структуре или в виде функции. Оценка структурных повреждений будет облегчать планирование траектории внутри анатомической области, которая минимизирует общее повреждение.
Например, в связи с хирургией головного мозга, перемещение через уязвимые точки ввода на черепе (например, на виске) не желательно, так как данная траектория потребует последующей восстановительной хирургии. Кроме того, любое повреждение критических структур головного мозга (например, кровеносных сосудов, желудочков, питуитарных желез, варолиева моста и зрительных нервов) может означать потерю жизни или ключевых жизненных функций. Даже если упомянутые участки невелики, они могут очень дорого стоить. Использование оценки структурных повреждений помогает планировать минимально инвазивную хирургию посредством минимизации, если не предотвращения, любого повреждения критических структур и уязвимых точек ввода. Как дополнительно поясняется в дальнейшем, для алгоритма поиска A*, значения оценок структурных повреждений можно использовать в сочетании со стоимостной метрикой и эвристическими значениями параметров для поиска по дискретизированному пространству конфигураций, которое обходит препятствия, но также выдерживает безопасное расстояние от упомянутых препятствий.
Во-вторых, можно выделить предпочтительную точку или участок ввода, с учетом намеченного объекта и оценки структурных повреждений, например, полей Бродманна на карте 100 головного мозга, представленной на Фиг.1. В таких случаях, как планирование для головного мозга, когда трепанационное отверстие можно делать в любом из многочисленных местоположений, крайне важно идентифицировать подходящее начальное местоположение, с учетом намеченного объекта, таким образом, чтобы минимизировать общее повреждение, но чтобы намеченный объект был достижимым с помощью современных инструментов.
В-третьих, прежние применения планирования траектории определялись для устройств, содержащих телескопические канюли, ориентируемые иглы и бронхоскопы. Телескопические канюли выдвигаются последовательно от наибольшей к наименьшей и изогнуты в разных направлениях для глубокого проникания в анатомические области. Способ конфигурирования упомянутых устройств описан в международной публикации WO 2008/032230, «Active Cannula Configuration for Minimally Invasive Surgery», Karen I. Trovato. Поскольку телескопические канюли не имеют ни электроприводных сочленений по их длине, ни «нитей для управления куклами-марионетками», то упомянутые канюли можно изготавливать с очень малыми размерами, что полезно для применений на головном мозге, а также многих других минимально инвазивных процедур. Управление ориентацией других устройств, например, бронхоскопа и конической иглы, описано в международной публикации WO 2007/042986, «3D Tool Path Planning, Simulation and Control System», Karen I. Trovato et al. Для некоторых устройств и применений, идентификация или выбор ориентации приближения к намеченному объекту может оказаться нелегкой задачей.
Общая задача состоит в том, как создать несколько ориентаций приближения к намеченному объекту, например, центру опухоли, без трудоемкого ручного ввода, при сохранении 3-мерного пространства конфигураций для 6-мерного планирования. В простом примере, ориентацию приближения можно сформировать по направлению из прилегающих соседних вершин к начальной вершине. Следовательно, направление поиска устанавливают как противоположное направление (от начальной вершины к прилегающим соседним вершинам). Данное «геометрическое расширение» обеспечивает простое достижимое множество различных ориентаций, с одновременным охватом всех окружающих направлений. Если упомянутые соседние вершины с допустимой точностью представляют намеченный объект, то их можно использовать как замещающие «начальные вершины», имеющие нулевую стоимость и заданную ориентацию для инициирования поиска A*, если упомянутые соседние вершины не находятся в запрещенном или бесконечно дорогом по стоимости местоположении. Естественно, можно использовать геометрические окрестности многих форм и размеров, а не только такие, которые являются непосредственно прилегающими, однако, упомянутые окрестности должны задавать осуществимые конечные движения или действия. И, наконец, геометрическая окрестность, используемая для установки ориентации замещающих начальных вершин, не обязательно должна согласовываться с окрестностью, используемой во время поиска A*.
Например, на Фиг.2 показана неголономная окрестность 101 дуг, которую можно использовать, чтобы вычислить последовательность телескопических канюль для прихода в намеченное местоположение внутри анатомической области тела, как известно в технике. Поиск окрестности 101, обычно, разворачивается в алгоритме поиска A*, основанном на единственной ориентации, ведущей в единственную намеченную вершину. Однако, геометрическое расширение в соответствии с настоящим изобретением облегчит поиск окрестности в алгоритме поиска A*, основанном на нескольких ориентациях, окружающих единственную намеченную вершину. Результатом может быть криволинейный маршрут через анатомическую область, проходящий между намеченной вершиной и оптимальной разрешенной точкой ввода. Специалистам со средним уровнем компетентности в данной области техники будет ясно, что упомянутое геометрическое расширение в сочетании с вышеупомянутой оценкой структурных повреждений обеспечивает создание кинематически допустимой траектории для устройств (например, бронхоскопа или конической иглы) и составление кинематически допустимой телескопической канюли, которая минимизирует повреждение чувствительных структур или уязвимых точек ввода во время минимально инвазивной хирургии.
Специалистам со средним уровнем компетентности в данной области техники следует понимать, что нижеследующее описание Фиг.3-18 приведено с целью общего пояснения вышеописанных принципов изобретения в соответствии с настоящим изобретением, с использованием конкретных, но исчерпывающих примеров, а не для ограничения применения упомянутых принципов изобретения. В частности, необязательные сведения об известных функциях и операциях могут быть исключены из настоящего описания принципов изобретения, чтобы не запутывать настоящее изобретение. Тем не менее, специалисту будет понятно, каким образом следует практически применять принципы изобретения в соответствии с настоящим изобретением к применению любого рода по планированию траектории (т.е. планированию траектории хирургического инструмента, планированию траектории транспортного средства, планированию пути развития экономической системы и т.п.), и дополнительно будет понятно, что существует много вариантов, которые не выходят за пределы существа настоящего изобретения и объема притязаний прилагаемой формулы изобретения.
На Фиг.3 изображены фаза 110 установки и фаза 111 планирования траектории для применения любого рода по планированию траектории, в частности, для планирования хирургической траектории аппарата внутри пациента во время минимально инвазивной хирургии или для планирования составления телескопической канюли. В общих словах, фаза 110 установки может содержать, по меньшей мере, (1) составление структуры вершин пространства конфигураций, представляющей дискретизированное пространство конфигураций, содержащее множество состояний (вершин), характеризуемых одним или более параметрами, (2) идентификацию окрестности, охватывающей все допустимые действия, которые вызывают изменения или переходы между состояниями (вершинами) в дискретизированном пространстве конфигураций, и (3) формулирование метрики, представляющей стоимость перехода из одного состояния в соседнее состояние, заданные «окрестностью». Кроме того, в общем, фаза 111 планирования траектории может содержать, по меньшей мере, (1) идентификацию или определение начальной вершины в пределах дискретизированного пространства конфигураций и (2) использование начальной вершины для инициирования распространения стоимостных волн через структуру вершин пространства конфигураций, на основании метрики, для нахождения наиболее желательной последовательности событий между начальной вершиной и целевой вершиной.
Настоящее изобретение привносит метод 112 оценки структурных повреждений и метод 113 геометрического расширения, которые могут по отдельности или совместно встраиваться в фазу 110 установки и фазу 111 планирования траектории при применении для планирования траектории. В общем, структура вершин пространства конфигураций включает в себя множество вершин, в котором каждая вершина находится в отличающемся дискретном местоположении в дискретизированном пространстве конфигураций, характеризуемом параметром(ами), и метод 112 обеспечивает использование значений оценок структурных повреждений, в прямой форме количественно определяющих оценку повреждения потенциального повреждения анатомических структур анатомической области тела, а метод 113 обеспечивает использование одной или нескольких соседних вершин, геометрически смежных в свободном пространстве с намеченной вершиной, в качестве замещающих начальных вершин во время выполнения поиска в свободном пространстве дискретизированного пространства конфигураций.
Ниже приведено описание примерного варианта осуществления методов 112 и 113, изображенного на Фиг.4-18, с целью облегчения более глубокого понимания принципов изобретения в соответствии с настоящим изобретением, чтобы специалистам со средним уровнем компетентности в данной области техники стали ясны различные преимущества настоящего изобретения.
A. СПОСОБ ПЛАНИРОВАНИЯ ТРАЕКТОРИИ, СОДЕРЖАЩИЙ ОЦЕНКУ РИСКА ДЛЯ СТРУКТУР И ГЕОМЕТРИЧЕСКОЕ РАСШИРЕНИЕ
На Фиг.4 приведена блок-схема 120 последовательности операций, представляющая способ планирования траектории в соответствии с настоящим изобретением. Целью данного способа является получение практического набора значений стоимости состояний дискретизированного пространства конфигураций в фазе 110 установки (Фиг.3) при применении для планирования траектории, чтобы облегчить оптимальный поиск в фазе 111 планирования траектории (Фиг.3) при применении для планирования траектории. В дальнейшем, приведенная цель излагается в настоящем описании в контексте добавления метода 112 оценки структурных повреждений и метода 113 геометрического расширения в соответствии с настоящим изобретением. Таким образом, описание общеизвестных процедур планирования траектории, выполняемых в фазах 110 и 111, приведено только при необходимости облегчить понимание методов 112 и 113 в соответствии с настоящим изобретением.
Как показано на Фиг.4, фаза 110 установки включает в себя этап S121 и этап S122 блок-схемы 120 последовательности операций способа.
Этап 121 охватывает обнаружение анатомических участков в анатомической области тела, на которых особенно важно минимизировать или предотвратить любое повреждение структур. Упомянутые критические участки содержат, но без ограничения, уязвимые точки ввода в анатомическую область и уязвимые структуры в пределах анатомической области, подверженные повреждению аппаратом, применяемым во время минимально инвазивной хирургии в данной области, например, сосудистую сеть головного мозга/желудочки 130 головного мозга, показанные на Фиг.5. В одном варианте осуществления этапа S121, обнаружение критических участков можно выполнять по изображениям анатомической области вручную или по атласу. Например, ручное обнаружение может использовать компьютерно-томографическое, магнитно-резонансное или подобное изображение, которое сегментируют вручную или с помощью известных полуавтоматических алгоритмов, с учетом небольшого числа критических структур, которые несложно выделить оконтуриванием.
Напротив, для критических участков, которые невозможно определить посредством визуализации, можно использовать совмещение между сегментированными данными для конкретного пациента и анатомическим/функциональным атласом. На Фиг.6 представлен пример сегментации и совмещения слоя изображения головного мозга. В частности, в процессе хирургии головного мозга обычно применяют MRI (магнитно-резонансную визуализацию) как для диагностики, так и для планирования. Автоматическая алгоритмическая или ручная сегментация могут обнаруживать основные типы тканей, например, белое вещество, серое вещество, твердую мозговую оболочку, кровеносные сосуды, спинномозговую жидкость, череп и кожу. Однако, для минимально инвазивной траектории можно использовать другие структуры, не видимые на магнитно-резонансном изображении (MRI), например, поля 100 Броманна, показанные на Фиг.1, чтобы охарактеризовать структурное повреждение, вызывающее функциональное нарушение. Для этого, ручная или (полу)автоматическая сегментация видимых участков в магнитно-резонансном (MRI) изображении 140 сечения головного мозга человека дает, в результате, сегментированное изображение 141, которое совмещают деформируемым методом с известным подробным атласом 143 сечений головного мозга человека для получения помеченного изображения 142. Одним из упомянутых известных атласов является атлас Талайраха (Talairach) (смотри работу: Lancaster JL, Woldorff MG, Parsons LM, Liotti M, Freitas CS, Rainey L, Kochunov PV, Nickerson D, Mikiten SA, Fox PT, «Automated Talairach Atlas labels for functional brain mapping». Human Brain Mapping 10: 120-131, 2000), набор из 1004 разных нейрологических меток, отмечающих каждый пиксель атласа головного мозга. Если выполняют совмещение между атласом 143 и сегментированным изображением 141, то устанавливают преобразование между каждым вокселем в изображении 141 пациента и каждым вокселем модели 143 атласа. Поэтому, каждый элемент изображения 141 пациента помечается на основе его нейрологической функции. В ходе процедуры сегментации помечаются ненейрологические структуры (например, CSF (спинномозговая жидкость) или кровеносные сосуды).
Этап S122 содержит оценку структурных повреждений для каждой вершины конфигурации в свободном пространстве, представляющей некритические участки анатомической области как безопасные или представляющие риск. В общем, стоимость каждой запрещенной вершины конфигурации, представляющей обнаруженные критические участки (препятствие и уязвимые точки ввода) анатомической области, соответствует критическому анатомическому участку, имеющему бесконечную стоимость риска. Напротив, стоимость риска для каждой безопасной вершины конфигурации в свободном пространстве характеризуется нулевым риском структурного повреждения, тогда как каждая сопряженная с риском вершина конфигурации в свободном пространстве характеризуется расчетным риском структурного повреждения в диапазоне изменения от ненулевого конечного риска до бесконечного риска. В общих словах, стоимость запрещенной вершины конфигурации равна C=∝, стоимость безопасной вершины конфигурации в свободном пространстве равна C=0, и стоимость сопряженной с риском вершины конфигурации в свободном пространстве равна C ≤ ∝.
В одном варианте осуществления этапа S122, стоимости, связанные с каждой вершиной конфигурации в свободном пространстве, могут быть установлены пользователем, посредством выведения из запрещенных вершин конфигурации или из объединения индивидуальных установленных стоимостей и запрещенных вершин конфигурации, или могут быть установлены компьютерной программой, например, на основании автоматической процедуры сегментации. Например, для нейрохирургического применения, совместные стоимости могут быть сформированы посредством объединения (например, суммирования или усреднения): a) стоимости для соседних критических точек или участков (например, расстояния от критических анатомических участков) и b) незапрещенной стоимости, сопряженной с риском.
На Фиг.7 приведена блок-схема 150 последовательности операций способа вычисления стоимости в соответствии с настоящим изобретением, который описан ниже на упрощенном 2-мерном примере помеченного изображения (например, помеченного изображения 142, показанного на Фиг.6) и на примере цветокодированной стоимостной шкалы, показанной на Фиг.8, продолжающейся от нулевой стоимости, кодированной белым цветом, до бесконечной стоимости, кодированной черным цветом. Этап S151 блок-схемы 150 последовательности операций способа содержит создание карты основных препятствий, получаемой на основании запрещенных вершин конфигурации в помеченном изображении, например, карты 160 препятствий, показанной на Фиг.9, содержащей темноокрашенные вершины бесконечной стоимости, ассоциированные с запрещенными участками. Этап S152 блок-схемы 150 последовательности операций способа содержит создание карты расширенных препятствий, получаемой из зон безопасности, установленных вокруг запрещенных зон. Например, карта 161 расширенных препятствий, показанная на Фиг.10, содержащая темноокрашенные вершины бесконечной стоимости, ассоциированные с запрещенными участками, имеет дополнительную защитную зону из бесконечно дорогих (по стоимости) вершин конфигурации в свободном пространстве, окружающих исходные запрещенные вершины конфигурации. Белые кромки вокруг исходных запрещенных вершин конфигурации служат только для поддержки визуального отделения новых добавленных бесконечно дорогих (по стоимости) вершин конфигурации в свободном пространстве от исходных запрещенных вершин конфигурации. Этап S153 блок-схемы 150 последовательности операций способа содержит создание карты расстояний до препятствий, получаемой на основе расстояния для ближайших участков с бесконечной стоимостью. Например, карта 162 расстояний до препятствий, показанная на Фиг.11, имеет окрашенные серым вершины конечной стоимости, со значениями, уменьшающимися с удалением вершин конфигурации в свободном пространстве от любой критической зоны, окруженной защитной зоной.
Этап S154 блок-схемы 150 последовательности операций способа содержит создание карты эмпирических данных из изображения, помеченного эмпирическими данными, характеризующими физическую чувствительность каждого критического анатомического участка (препятствий и уязвимых точек ввода) к внешним раздражителям (хирургическим аппаратам/инструментам). Например, эмпирическая взвешенная карта 163, показанная на Фиг.12, имеет окрашенные серым вершины с нулевой или конечной стоимостью, соответствующие физической чувствительности в каждой из вершин конфигурации в свободном пространстве, эмпирически определяемой пользователем или автоматической процедурой сегментации.
Этап S155 блок-схемы 150 последовательности операций способа содержит объединение карты расстояний до препятствий и карты эмпирических данных на основании объединения (например, суммирования и/или усреднения) согласующихся вершин. Например, на Фиг.13, карта 164 стоимостей имеет цветокодированные участки со значениями, совместно полученными на основании запрещенных участков и эмпирических данных таким образом, чтобы обходить запрещенные участки на как можно большем удалении для минимизации, если не предотвращения, любого структурного повреждения анатомических структур, ассоциированных с запрещенными участками.
Хотя специалистам со средним уровнем компетентности в данной области техники будет понятно, что показанная блок-схема 150 последовательности операций способа будет способствовать очень высокой безопасности запрещенных точек и участков, ниже приведено описание альтернативных вариантов осуществления блок-схемы 150 последовательности операций способа, которую можно реализовать на практике.
В первом альтернативном варианте осуществления блок-схемы 150 последовательности операций способа, этап S152 создания карты расширенных препятствий может быть исключен, как указано пунктирной стрелкой, проходящей от этапа S151 создания карты основных препятствий к этапу S153 создания карты расстояний до препятствий.
Во втором альтернативном варианте осуществления блок-схемы 150 последовательности операций способа, этап S153 создания карты расстояний до препятствий может быть исключен, как указано пунктирной стрелкой, проходящей от этапа S152 создания карты расширенных препятствий к этапу S155 объединения карт.
В третьем альтернативном варианте осуществления блок-схемы 150 последовательности операций способа можно исключить как этап S152 создания карты расширенных препятствий, так и этап S153 создания карты расстояний до препятствий, как указано пунктирной стрелкой, проходящей от этапа S151 создания карты основных препятствий к этапу S155 объединения карт.
В четвертом альтернативном варианте осуществления блок-схемы 150 последовательности операций способа могут быть исключены этапы S151-S153 создания карт препятствий, и, тем самым, для вычисления стоимостных оценок структурных повреждений используют только этап S154 создания эмпирической взвешенной карты.
В пятом альтернативном варианте осуществления блок-схемы 150 последовательности операций способа, возможно исключение только одного этапа S154 создания эмпирической взвешенной карты или вместе с одним или более из этапов S151-S153 создания карт препятствий, и, тем самым, для вычисления стоимостных оценок структурных повреждений используют оставшиеся этапы создания карт препятствий.
Как также было показано на Фиг.4, фаза 111 планирования траектории включает в себя этапы S123-S126 блок-схемы 120 последовательности операций способа.
Этап S123 содержит идентификацию, выполняемую пользователем или компьютером, намеченной точки, например, средней точки опухоли, и идентификацию, выполняемую пользователем или компьютером, набора из, по меньшей мере, одной(го) или более допустимых точек/участков введения инструмента для соответствующей хирургической операции. Например, единственный участок введения хирургического аппарата (например, телескопической канюли) в легкие может представлять собой сечение трахеи в конкретном слое CT (компьютерной томограммы). В альтернативном варианте возможен выбор одного или более участков введения для входа хирургического аппарата из любого безопасного участка черепа. Приемлемая траектория существует только в том случае, если от входа можно подойти к намеченному объекту, при допустимой суммарной стоимости. Пределы «допустимости» должен определять врач, который взвешивает риск и выгоду.
Этап S124 содержит продвижение из намеченной точки к точке(ам) введения и/или участку(ам) введения при посредстве алгоритма поиска A*. В одном варианте осуществления этапа S124 выполняются блок-схема 170 последовательности операций способа, показанная на Фиг.14, и блок-схема 190 последовательности операций способа, показанная на Фиг.16.
Как показано на Фиг.14, блок-схема 170 последовательности операций способа характеризует способ геометрического расширения в соответствии с настоящим изобретением. Этап S171 блок-схемы 170 последовательности операций способа содержит идентификацию намеченной вершины, соответствующей выбранной намеченной точке в пределах анатомической области, и этап S172 блок-схемы 170 последовательности операций способа содержит геометрическое расширение намеченной вершины для идентификации геометрически смежных вершин конфигурации в свободном пространстве. Одна или более из упомянутых геометрически смежных вершин конфигурации в свободном пространстве может служить замещающей начальной вершиной, при наборе ориентаций по углу, сформированном между намеченной вершиной и геометрически смежной вершиной конфигурации в свободном пространстве в процессе выполнения блок-схемы 170 последовательности операций способа, как поясняется в последующем в настоящем описании.
На Фиг.15 изображено стандартное исходное состояние 180 центральной намеченной вершины в упрощенном двумерном («2-мерном») пространстве, которое определяется точкой и ориентацией (например, -50°, 0°, 0°). В качестве альтернативы, намеченную вершину можно заменить набором геометрически смежных вершин конфигурации в свободном пространстве, в котором каждая вершина ориентирована наружу для установки направления поиска, который трансформируется в расширенное исходное состояние 181 центральной намеченной вершины, имеющей каждую геометрически смежную соседнюю вершину в свободном пространстве, определяемую точкой, ориентацией, нитью и стоимостью.
Как показано на Фиг.16, блок-схема 190 последовательности операций способа характеризует алгоритм поиска A* для определения оптимальной траектории из каждой расширенной «начальной» вершины в «целевое положение» точки/участка введения, с использованием неявных или, предпочтительно, явных дискретных значений параметров, основанных на окрестности 101, показанной на Фиг.2. Для метода геометрического расширения, каждая «начальная» вершина является замещающей вершиной в свободном пространстве, геометрически смежной с намеченной вершиной, имеющей стоимость оценки структурного повреждения меньше бесконечности или критический порог повреждения меньше, чем бесконечность.
В процессе выполнения, в сортирующее дерево помещают первую расширенную «начальную» вершину, чтобы начать распространение стоимостной волны или A*. Сортирующее дерево представляет собой сбалансированное двоичное дерево, которое обеспечивает наименьшее значение стоимости в корне. Вершина с наименьшей стоимостью, взятая из сортирующего дерева, называется «базовой», на этапе S191 блок-схемы 190 последовательности операций способа. В прежних случаях применения для робототехники и планирования траектории, траекторию часто создавали с использованием целевых положений как начальных вершин. В данных случаях применения, стоимость вершины (g(n), описанная в дальнейшем) называлась «стоимость до целевого положения» («cost_to_goal»). В настоящем применении, термин изменен на более общий по смыслу термин «стоимость до начальной вершины» («cost_to_seed»), но оба термина следует считать эквивалентными. Существуют общеизвестные алгоритмы для управления структурами сортировки, включая сортирующие деревья.
Этап S191 дополнительно содержит получение подробной информации о пространстве конфигураций «базовой» вершины, предпочтительно, явные значения дискретных параметров базовой вершины. Данный этап обеспечит прецессию, необходимую для распространения стоимостной волны, без какого-либо отрицательного воздействия на быстродействие и емкость памяти системы, выполняющей блок-схему 190 последовательности операций способа.
Этап S192 блок-схемы 190 последовательности операций способа содержит тестирование «критерия остановки». Существует много тестов, которые могут быть выполнены для определения, можно ли остановить процесс. «Критерий остановки» может содержать, но без ограничения, (1) тест для определения, является ли сортирующее дерево пустым, и (2) тест для определения, является ли текущая («базовая») вершина одной из идентифицированных точек или принадлежит к одному из участков введения. Упомянутый критерий остановки гарантирует, что между участком введения и намеченным объектом имеется осуществимое соединение, и что значение является минимальным для данного местоположения. Это создает возможность завершения поиска прежде, чем заполняется все пространство, но, тем не менее, приведенный подход дает оптимальную траекторию между «начальной вершиной» и «целевым положением». Третий критерий остановки, разработанный для настоящего изобретения, содержит представление цветокодированной поверхности достигаемой точки введения или участка введения, ранее выбранной пользователем на основании стоимости достижения точки введения или участка введения, вследствие чего выбор точки входа пользователем считается выбором оптимальной траектории между «начальной вершиной» и «целевым положением».
Если «критерий остановки» удовлетворяется, то блок-схема 190 последовательности операций способа завершается. В ином случае, если «критерий остановки» не удовлетворяется, то этап S193 блок-схемы 190 последовательности операций способа содержит создание окрестности допустимых переходов. Вершины, соседние с «базовой» вершиной, вычисляются на основании ориентаций «базовой» вершины, задаваемых ее углами альфа, тэта и фи, а также «базовыми» координатами x, y, z. Окрестность получается в результате поворота номинальной окрестности на углы альфа, тэта и фи, и, затем, поступательного перемещения уже повернутой окрестности относительно координат x, y, z «базовой» вершины. Способы поворота и поступательного перемещения точек широко известны специалистам в данной области техники.
Затем, полученную окрестность поступательно перемещают и поворачивают в местоположение текущей расширяющей вершины.
Как только вершины, соседние с текущей «базовой» вершиной, вычисляют, блок-схема 190 последовательности операций способа переходит на этап S194, на котором выбирается следующая нить (T) окрестности, если таковая существует. Если нитей больше не существует, то блок-схема 190 последовательности операций способа возвращается на этап S191. В ином случае, если нить (T) существует, то блок-схема 190 последовательности операций способа переходит на этап S195 для выбора следующей соседней вершины (n') вдоль нити (T), если таковая существует. Положение и ориентация соседней вершины n' вычисляются относительно положения и ориентации «базовой» вершины для данной текущей нити.
Если, вдоль данной нити (T) больше нет соседних вершин, то блок-схема 190 последовательности операций способа возвращается на этап S194. Если другая соседняя вершина (n) отсутствует, то блок-схема 190 последовательности операций способа переходит на этап 196, чтобы проверить значение стоимости соседней вершины. Если стоимость бесконечна, или имеется другой признак того, что соседняя вершина не проходима, то блок-схема 190 последовательности операций способа возвращается на этап S194. Другой признак может указывать, что соседняя вершина имеет значение стоимости выше, чем некоторый предварительно заданный порог, который меньше, чем бесконечность, но слишком высок для прохождения. Данный порог может быть функцией, например, текущего проходимого расстояния (в «базовой» вершине).
Если соседняя вершина не имеет бесконечной стоимости и является проходимой, то блок-схема 190 последовательности операций способа переходит на этап S197 для вычисления предложенной новой стоимости g(n') для новой соседней вершины, n'. По алгоритму поиска A* вычисляются две стоимости. Первая называется «g(n')». Данная стоимость является стоимостью наилучшей траектории (до сих пор) к вершине n', которая подходит из «базовой вершины» или «родительской вершины», часто обозначаемой как n, без штриха ('). Функция g(n') включает в себя стоимость достижения базовой вершины, плюс стоимость перехода из базовой вершины к n', плюс любое структурное повреждение, которое может явиться результатом перехода из базовой вершины к n'. При планировании траектории для телескопической канюли, стоимостью перехода часто является длина траектории. Структурное повреждение, причиняемое в результате перемещения от базовой вершины к n', можно рассчитать как сумму стоимостей каждого промежуточного состояния, при подсчете состояний после n (так как n уже сосчитано), через и включая n'. Данное вычисление можно также выполнить альтернативным способом, согласно которому общее структурное повреждение учитывает размер трубки по мере того, как трубка пересекает каждый воксель (объемный элемент), чтобы интегральный объем, проходимый трубкой, взвешивался, например, по различным областям структурных повреждений. Поэтому, можно ожидать, что трубка 3-мм диаметра должна причинять вдвое большее повреждение, чем трубка 1,5-мм диаметра. Другая альтернатива может возникать, когда доминирующая стоимость определяется суммарным структурным повреждением, независимо от расстояния. В данном случае, стоимость перехода может быть оценкой только структурного повреждения, без стоимости, обусловленной расстоянием.
Второе значение, вычисляемое по алгоритму поиска A*, представляет собой f(n'), которое, проще говоря, является «наиболее благоприятным сценарием» для траектории, которая сначала проходит через «базовую вершину» (каким бы образом траектория ни приходила из начальной вершины), затем переходит через n' (включая потери) и, наконец, приходит, в оптимистическом варианте (непосредственно), в точку ввода, с использованием эвристической функции, h(n'). Как известно специалистам в данной области техники, существует много возможных эвристических правил. Оптимистическая стоимость при эвристическом подходе может быть, например, нулевой, однако, данное правило неинформированной эвристической процедуры не обеспечивает направления для поиска. Другим широко применяемым эвристическим правилом является линейное или евклидово расстояние «по прямой», или, другими словами, «остающееся расстояние». Еще одной оценкой может быть суммарная стоимость структурного повреждения по остающемуся расстоянию, при текущем размере трубки. При выборе эвристической оценки, которая является оптимистической, суммарная стоимость f(n') представляет собой результирующее значение ожидания-возможности траектории, которая проходит через n'. В общих словах,
g(n')=g(«базовая вершина»)+переход(«базовая вершина», n')+C(«базовая вершина», n')
f(n')=g(n')+h(n')
Стоимость для g(n') и f(n') часто сохраняется вместе с другими данными для вершины n'.
После этого, блок-схема 190 последовательности операций способа переходит на этап S198 для сравнения новой вычисленной стоимости F(n') с ранее существовавшей стоимостью в n', F(n'). Если новая вычисленная стоимость F(n') больше, чем ранее существовавшая стоимость F(n'), то достижение n через «базовую» вершину стоит больше, чем любая ранее найденная стоимость (т.е. улучшение отсутствует), и блок-схема 190 последовательности операций способа возвращается на этап S195. Если вычисленная стоимость, F(n') меньше, чем ранее существовавшая стоимость F(n'), то данное значение является улучшением по сравнению с прежними направлениями, и тогда блок-схема 190 последовательности операций способа переходит от этапа S198 на этап S199. Этап S199 добавляет соседнюю вершину в набор возможных вершин для открытия (расширения) в следующий раз. Упомянутый набор можно сохранить, например, в сортирующем дереве, и набор можно отсортировать методом пирамидальной сортировки. Если соседняя вершина уже находится в сортирующем дереве, то значения вершины корректируются, и сортирующее дерево повторно сортируется. Следовательно, вершина x, которая имеет наименьшую стоимость f(x), идентифицирует наиболее желательную вершину для исследования (расширения) в следующий раз.
Этап S199 дополнительно содержит присвоение n новой стоимости до начальной вершины (cost_to_seed), а также конкретного положения (например x, y, z) и ориентации (например, углов альфа, тэта и фи). В 6-мерном пространстве, положение и ориентация представляются 3-мерным положением (x, y, z) и 3 углами (альфа, тэта и фи). Если данные набора допустимых перемещений собираются в структуре окрестности с дискретным угловым смещением (смотри, например, Фиг.2), то задача сводится к 5-мерной, так как данные 6-го измерения собираются окрестностью. Поэтому, расположение задается 3-мерным положением (x, y, z) и 2 углами (тэта, фи). Исправленному вектору присваивается указатель на «базовую вершину», так как он ведет к «начальной» вершине наилучшим путем. По желанию, но, все же, предпочтительно, сохраняется также номер и тип нити. Это используется для определения размеров трубки для обхода препятствий, а также вариантов изгиба. Кроме того, номер нити непосредственно отображается в управляющие параметры, применяемые для управления такими устройствами, как бронхоскоп, или непосредственно отображается в выбор трубки и ее ориентации относительно соседних вложенных трубок.
Как показано также на Фиг.4, этап S125 содержит обеспечение набора местоположений ввода, включая конкретную идентификацию оптимального местоположения, чтобы врач мог выбрать предпочтительную точку ввода, например, точки 240-250 ввода, показанные на Фиг.17 и рекомендованные набором типичных «безопасных» точек ввода для биопсии головного мозга. Источник: Sekhar, Fessler. Atlas of Neurosurgical Techniques. Chapter 33: Stereotactic Biopsy (Schwartz and Sisti), pp. 422-429. Например, планируемая траектория может быть обеспечена между намеченнным объектом и 4 эквивалентными точками ввода с минимальной стоимостью на черепе. Можно также выделить 10 других местоположений, вместе с соответствующими им более высокими стоимостями. Врач может выбрать одну из упомянутых точек, которая должна находиться в подходящем местоположении остановки или соответствовать критерию остановки.
На основании выбранной точки будет получена траектория, которая определяет набор управляющих параметров или конфигурацию устройства, или планируемую траекторию от выбранной точки к намеченному объекту. По желанию, данная траектория может быть представлена внутри 3-мерного изображения анатомической области во время этапа S126.
B. СИСТЕМА ПЛАНИРОВАНИЯ ТРАЕКТОРИИ, СОДЕРЖАЩАЯ ОЦЕНКУ РИСКА ДЛЯ СТРУКТУР И/ИЛИ ГЕОМЕТРИЧЕСКОЕ РАСШИРЕНИЕ
На Фиг.18 представлена система 200 планирования траектории в соответствии с настоящим изобретением. Система 200 включает в себя устройство 210 обработки данных и носитель 220 данных. Устройство 210 обработки данных использует блок 211 установки и блок 212 планирования в виде физически раздельных или интегрированных блоков для исполнения метода оценки структурных повреждений и/или метода геометрического расширения в соответствии с настоящим изобретением, ранее описанные в настоящей заявке в связи с Фиг.3-17. В общем, блок 211 установки выполняет все задачи, необходимые для составления структуры данных пространства конфигураций («CSDS») и других структур/функций, соответствующих конкретному применению по планированию траектории, на носителе 220 данных любого типа (например, RAM (оперативной памяти)), и блок 212 планирования распространяет стоимостные волны, при необходимости, для заполнения структуры вершин пространства конфигураций значениями стоимости как функцией значений параметров, в соответствии с характерными особенностями оценки структурных повреждений и/или геометрического расширения согласно настоящему изобретению, как требуется для конкретного применения по планированию траектории. В результате получают оптимальную траекторию 230 в формате, пригодном для конкретного применения по планированию траектории.
Способ или систему применяют для создания траектории. Упомянутую траекторию можно использовать несколькими способами. Траектория может управлять устройством, например, бронхоскопом или конической иглой. В альтернативном варианте, траекторию можно использовать для составления устройства, например, телескопической канюли. И, наконец, траекторию можно отображать на экране или налагать на 3-мерное изображение и отображать с использованием очков для наблюдения 3-мерных изображений.
Выше представлены и описаны различные варианты осуществления настоящего изобретения, однако, специалистам в данной области техники должно быть очевидно, что способы и система, описанные в настоящей заявке, являются наглядными, и в них можно вносить изменения и модификации, и элементы упомянутых способов и системы можно заменять эквивалентами, без выхода за истинные пределы объема настоящего изобретения. Кроме того, можно создавать многочисленные модификации, чтобы приспособить принципы настоящего изобретения к планированию траектории объекта, без выхода за пределы основного объема настоящего изобретения. Следовательно, следует считать, что настоящее изобретение не ограничено конкретными вариантами осуществления, представленными в качестве наилучшего варианта, предполагаемого для выполнения настоящего изобретения, но что настоящее изобретение включает в себя все варианты осуществления, не выходящие за пределы объема притязаний прилагаемой формулы изобретения.





Группа изобретений относится к средствам вычисления траектории инвазивного устройства. Способ планирования траектории в соответствии с хирургическим применением содержит этапы, на которых составляют структуру вершин пространства конфигураций на носителе данных, причем структура вершин пространства конфигураций включает в себя вершины конфигурации в свободном пространстве и запрещенные вершины конфигурации, представляющие дискретизированное пространство конфигураций анатомической области тела, и формируют оценку структурных повреждений для каждой вершины конфигурации в свободном пространстве, причем оценка структурных повреждений характеризует оценку потенциального повреждения, по меньшей мере, одного критического анатомического участка анатомической области тела, представленного запрещенными вершинами конфигурации, причем каждая запрещенная вершина конфигурации имеет бесконечное значение оценки структурного повреждения. Во втором варианте выполнения способа формирование оценки структурных повреждений для каждой вершины в свободном пространстве включает в себя этапы, на которых формируют помеченное изображение анатомической области тела, включающей в себя, по меньшей мере, один запрещенный участок анатомической области тела, и вычисляют значения оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением. Система планирования траектории содержит носитель данных и устройство обработки данных для составления структуры вершин пространства конфигураций на носителе данных. Использование изобретений позволяет минимизировать повреждение критических структур. 3 н. и 13 з.п. ф-лы, 18 ил.

1. Способ (120) планирования траектории в соответствии с хирургическим применением, при этом способ содержит этапы, на которых:
(110) составляют структуру вершин пространства конфигураций на носителе (220) данных, причем структура вершин пространства конфигураций включает в себя вершины конфигурации в свободном пространстве и запрещенные вершины конфигурации, представляющие дискретизированное пространство конфигураций анатомической области (100) тела; и
(S122) формируют оценку структурных повреждений для каждой вершины конфигурации в свободном пространстве, причем оценка структурных повреждений характеризует оценку потенциального повреждения, по меньшей мере, одного критического анатомического участка анатомической области (100) тела, представленного запрещенными вершинами конфигурации, причем каждая запрещенная вершина конфигурации имеет бесконечное значение оценки структурного повреждения.
2. Способ по п. 1, в котором вершины конфигурации в свободном пространстве включают в себя, по меньшей мере, одну из:
безопасной вершины конфигурации в свободном пространстве, имеющей нулевое значение оценки структурного повреждения;
сопряженной с риском вершины конфигурации в свободном пространстве, имеющей конечное значение оценки структурного повреждения; и
сопряженной с риском вершины конфигурации в свободном пространстве, имеющей бесконечное значение оценки структурного повреждения.
3. Способ по п. 1, в котором, по меньшей мере, один критический анатомический участок включает в себя, по меньшей мере, одно из:
критической анатомической структуры в пределах анатомической области (100) тела; и
уязвимой точки ввода в анатомическую область (100) тела.
4. Способ по п. 1, в котором формирование оценки структурных повреждений для каждой вершины в свободном пространстве включает в себя этапы, на которых:
формируют помеченное изображение (142) анатомической области (100) тела, включающей в себя, по меньшей мере, один запрещенный участок анатомической области (100) тела; и
вычисляют значения оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142).
5. Способ по п. 4, в котором формирование помеченного изображения (142) анатомической области (100) тела включает в себя этап, на котором:
совмещают, по меньшей мере, одно изображение пациента анатомической области (100) тела с атласом (143) анатомической области (100) тела.
6. Способ по п. 4, в котором этап вычисления значений оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142), включает в себя этап, на котором:
формируют карту (160) основных препятствий, получаемую на основании каждого запрещенного участка анатомической области (100), ассоциированной с помеченным изображением (142), при этом каждая вершина конфигурации в свободном пространстве карты (160) основных препятствий имеет значение оценки структурных повреждений меньше, чем бесконечность.
7. Способ по п. 6, в котором этап вычисления значений оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142), дополнительно включает в себя этап, на котором:
формируют карту (161) расширенных основных препятствий, получаемую на основании, по меньшей мере, одной защитной зоны, созданной вокруг каждого запрещенного участка анатомической области (100) тела, при этом каждая вершина конфигурации в свободном пространстве карты (161) расширенных основных препятствий в пределах одной из, по меньшей мере, одной защитной зоны имеет бесконечное значение оценки структурного повреждения.
8. Способ по п. 4, в котором этап вычисления значений оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142), дополнительно включает в себя этап, на котором:
формируют карту (162) расстояний до препятствий, получаемую на основании расстояния до ближайшего запрещенного участка анатомической области (100) тела.
9. Способ по п. 4, в котором этап вычисления значений оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142), дополнительно включает в себя этап, на котором:
формируют эмпирическую взвешенную карту (163), получаемую на основании эмпирически полученной физической чувствительности каждого запрещенного участка анатомической области (100) тела, ассоциированной с помеченным изображением (142).
10. Способ по п. 1, дополнительно содержащий этап, на котором:
дополняют структуру вершин пространства конфигураций, составленной на носителе (220) данных, значениями оценок структурных повреждений, количественно оценивающих каждую вершину структуры вершин пространства конфигураций.
11. Способ по п. 10, в котором этап дополнения структуры вершин пространства конфигураций включает в себя функцию оценки суммарного расстояния суммарных переходов между вершинами по траектории.
12. Способ по п. 10, в котором этап дополнения структуры вершин пространства конфигураций включает в себя функцию оценки аппарата, ассоциированного с хирургическим применением, содержащую, по меньшей мере, один размер аппарата.
13. Способ по п. 10, в котором этап дополнения структуры вершин пространства конфигураций включает в себя геометрическое расширение намеченной вершины, содержащее, по меньшей мере, одну вершину конфигурации в свободном пространстве, геометрически смежную с намеченной вершиной, выполняющую функцию замещающей начальной вершины.
14. Система планирования траектории в соответствии с хирургическим применением, при этом система содержит:
носитель (220) данных; и
устройство (210) обработки данных, электрически связанное с носителем (220) данных, для составления структуры вершин пространства конфигураций на носителе (220) данных, причем структура вершин пространства конфигураций включает в себя вершины конфигурации в свободном пространстве и запрещенные вершины конфигурации, представляющие дискретизированное пространство конфигураций анатомической области (100) тела,
причем устройство (210) обработки данных функционально предназначено для формирования оценки структурных повреждений для каждой вершины конфигурации в свободном пространстве, причем оценка структурных повреждений характеризует оценку потенциального повреждения, по меньшей мере, одного критического анатомического участка, представленного запрещенными вершинами конфигурации, причем каждая запрещенная вершина конфигурации имеет бесконечное значение оценки структурного повреждения.
15. Система по п. 14, в которой устройство (210) обработки данных дополнительно функционально предназначено для дополнения структуры вершин пространства конфигураций, составленной на носителе (220) данных, значениями параметров, количественно оценивающими каждую вершину структуры вершин пространства конфигураций в соответствии с намеченной вершиной и участком ввода анатомической области (100) тела,
при этом дополнение структуры вершин пространства конфигураций включает в себя геометрическое расширение намеченной вершины, содержащее, по меньшей мере, одну вершину конфигурации в свободном пространстве, геометрически смежную с намеченной вершиной, выполняющую функцию замещающей начальной вершины.
16. Способ (120) планирования траектории в соответствии с хирургическим применением, при этом способ содержит этапы, на которых:
(110) составляют структуру вершин пространства конфигураций на носителе (220) данных, причем структура вершин пространства конфигураций включает в себя вершины конфигурации в свободном пространстве и запрещенные вершины конфигурации, представляющие дискретизированное пространство конфигураций анатомической области (100) тела; и
(S122) формируют оценку структурных повреждений для каждой вершины конфигурации в свободном пространстве, причем оценка структурных повреждений характеризует оценку потенциального повреждения, по меньшей мере, одного критического анатомического участка анатомической области (100) тела, представленного запрещенными вершинами конфигурации, причем каждая запрещенная вершина конфигурации имеет бесконечное значение оценки структурного повреждения, причем формирование оценки структурных повреждений для каждой вершины в свободном пространстве включает в себя этапы, на которых:
формируют помеченное изображение (142) анатомической области (100) тела, включающей в себя, по меньшей мере, один запрещенный участок анатомической области (100) тела; и
вычисляют значения оценок структурных повреждений для каждой вершины конфигурации в свободном пространстве, ассоциированной с помеченным изображением (142).
| WO 2007042986 A2, 19.04.2007 | |||
| EP 1844725 A1, 17.10.2007 | |||
| WO 2008032230 A1, 20.03.2008 | |||
| US 2004015070 A1, 22.01.2004 | |||
| US 6112750 A, 05.09.2000 | |||
| СПОСОБ СТЕРЕОТАКСИЧЕСКОГО НАВЕДЕНИЯ | 1995 |
|
RU2121296C1 |

