Предлагаемое изобретение относится к установке, предназначенной для преобразования гидравлической энергии в электрическую или механическую энергию, причем такая установка имеет в своем составе гидравлическую турбину, канал подведения к этой турбине потока воды под давлением и канал отведения этого потока после его выхода из турбины.
В известных установках подобного типа течение потока жидкости на выходе из турбины претерпевает изменения в зависимости от режима функционирования турбины, который зависит, кроме всего прочего, от расхода воды, поступающей в турбину. В некоторых режимах функционирования завихрения или турбулентность, обычно квалифицируемые как "факелы", имеют тенденцию к формированию и вызывают изменения давления и/или мощности.
Для того, чтобы решить эту проблему, известно, например, из патентного документа WO-A-2005/038243 оснащение колеса турбины типа Francis вершиной, содержащей две поверхности, соответственно сходящуюся и расходящуюся в направлении оси вращения колеса, что в значительной степени ограничивает возникновение турбулентности. Однако в некоторых режимах функционирования турбулентность все же имеет место.
Для того чтобы устранить эту потерю коэффициента полезного действия, в патентном документе US-A-2007/0009352 было рассмотрено использование убирающихся крылышек. Эти убирающиеся крылышки не приспособлены для всех режимов функционирования турбины, и в некоторых условиях функционирования их влияние на коэффициент полезного действия установки оказывается весьма негативным. Из патентного документа JP-A-57 108468 известна установка подвижного по вращательному движению крылышка над неподвижным крылышком в канале отведения потока на выходе из турбины. Фиксированное крылышко возмущает течение потока, по меньшей мере, в некоторых режимах функционирования.
Кроме того, проблемы кавитации могут неожиданно появиться при использовании известных технических средств.
Задачей изобретения является устранение вышеуказанных недостатков известных технических средств при помощи данного изобретения, предлагающего установку для преобразования энергии упомянутого выше типа, в которой течение потока, проходящее через канал отведения, может быть стабилизировано без уменьшения коэффициента полезного действия установки в различных режимах функционирования этой установки.
Для решения этой технической задачи предлагается установка для преобразования гидравлической энергии в электрическую или в механическую энергию, причем эта установка имеет в своем составе гидравлическую турбину, канал подведения к этой турбине потока воды под давлением, канал отведения потока, выходящего из турбины, и направляющие крылышки для течения потока в канале отведения, отличающаяся тем, что каждое направляющее крылышко является подвижным по вращательному движению относительно оси, пересекающей стенку канала отведения, причем установка имеет в своем составе средства управления угловым положением крылышка относительно оси его вращения, включающие блок и серводвигатель, причем каждое крылышко, подвижное по вращательному движению, является убирающимся в стенку канала отведения, при этом установка содержит поршень, выполненный с возможностью регулировать погружение крылышка в упомянутую стенку.
Предпочтительно, чтобы средства управления были выполнены с возможностью фиксировать угловое положение направляющего крылышка в зависимости от, по меньшей мере, одного параметра, являющегося характеристикой потока.
Предпочтительно, чтобы одно, или каждое, крылышко, подвижное по вращательному движению, являлось демонтируемым по отношению к стенке канала отведения с внутренней стороны этого канала.
Предпочтительно, чтобы установка содержала галерею доступа на наружной поверхности стенки канала отведения, и одно, или каждое, крылышко являлось демонтируемым по отношению к этой стенке из упомянутой галереи.
Предпочтительно, чтобы каждое крылышко было жестко связано с поршнем, установленным с возможностью скольжения параллельно оси вращения этого крылышка по отношению к венцу, закрепленному на стенке, и чтобы подсистема, имеющая в своем составе крылышко, поршень, корпус, шток, пластину и винты, устанавливалась с возможностью вращения относительно оси вращения этого крылышка и содержала зубья, обеспечивающие взаимодействие со средствами приведения упомянутой подсистемы во вращательное движение относительно оси вращения крылышка, включающими в себя шестерню и серводвигатель.
Предпочтительно, чтобы каждое подвижное крылышко проходило по одну и по другую стороны от оси его вращения.
Еще одним объектом настоящего изобретения является способ управления вышеуказанной установкой, включающий этап управления посредством блока управления и серводвигателя угловым положением каждого направляющего крылышка для течения потока в канале отведения относительно оси, пересекающей стенку канала отведения, и этап управления с возможностью регулирования положением каждого крылышка, выполненного с возможностью погружения в стенку канала отведения.
Предпочтительно, чтобы угловое положение крылышка управлялось в зависимости от, по меньшей мере, одного параметра, являющегося характеристикой потока, в частности, в зависимости от расхода этого потока.
Предпочтительно, чтобы упомянутая установка содержала несколько крылышек, распределенных на стенке канала отведения, и положение этих крылышек управлялось групповым образом.
Предпочтительно, чтобы упомянутая установка содержала несколько крылышек, распределенных на стенке трубопровода отведения, и положение каждого крылышка управлялось индивидуальным образом.
Предпочтительно, чтобы положение каждого крылышка, выполненного с возможностью погружения в стенку канала отведения, управлялось путем запитывания, или не запитывания, водой под давлением, поступающей из канала подведения, камеры, выполненной в корпусе, принадлежащем к подсистеме, и ограниченной поршнем, жестко связанным с крылышком.
В дальнейшем изобретение поясняется описанием неограничительных вариантов его осуществления со ссылками на фигуры чертежей, на которых:
- фиг.1 представляет собой схематичный вид в осевом разрезе установки, выполненной в соответствии с первым вариантом осуществления предлагаемого изобретения;
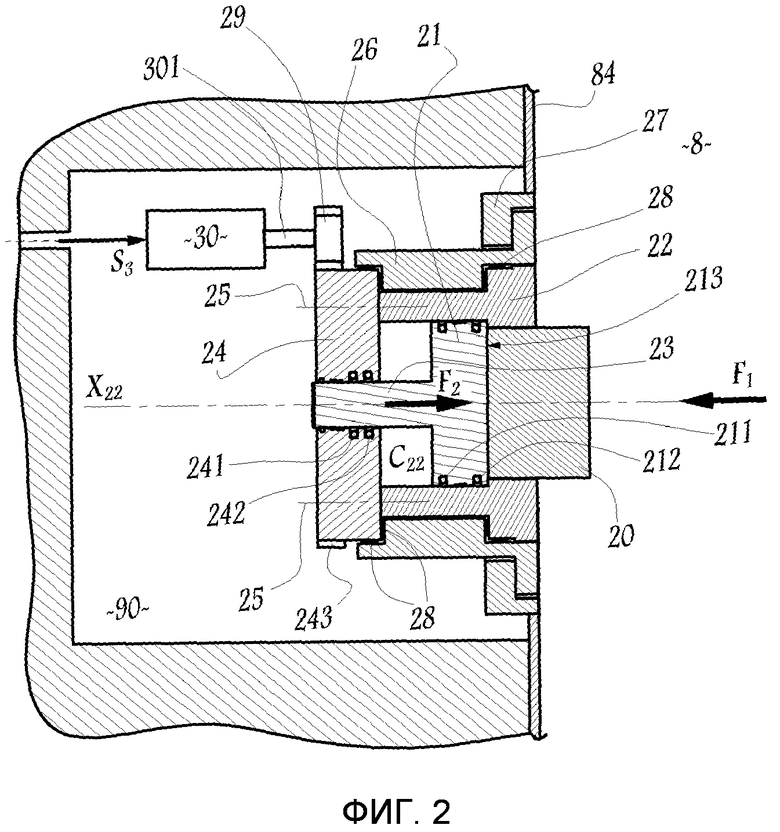
- фиг.2 представляет собой вид в увеличенном масштабе детали II, показанной на фиг.1;
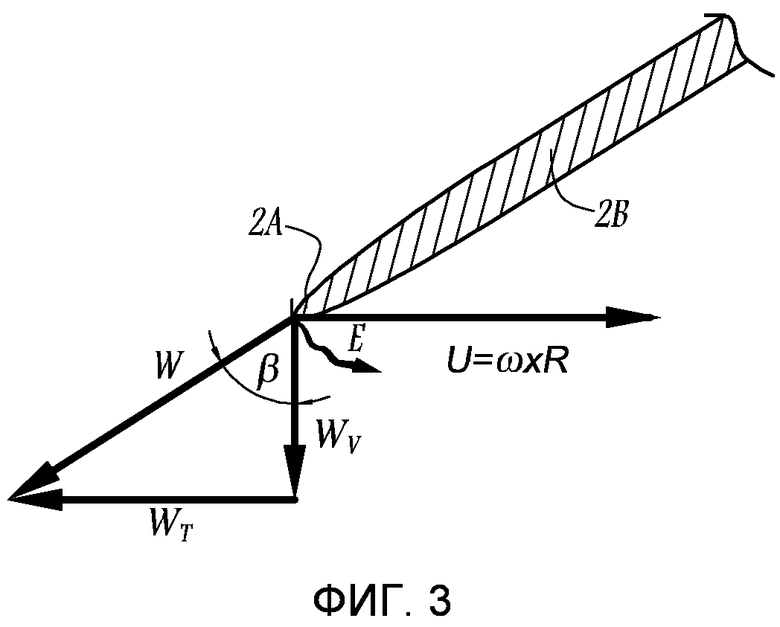
- фиг.3 представляет собой схематичный вид в развертке распределения скоростей в первой конфигурации использования установки, показанной на фиг.1;
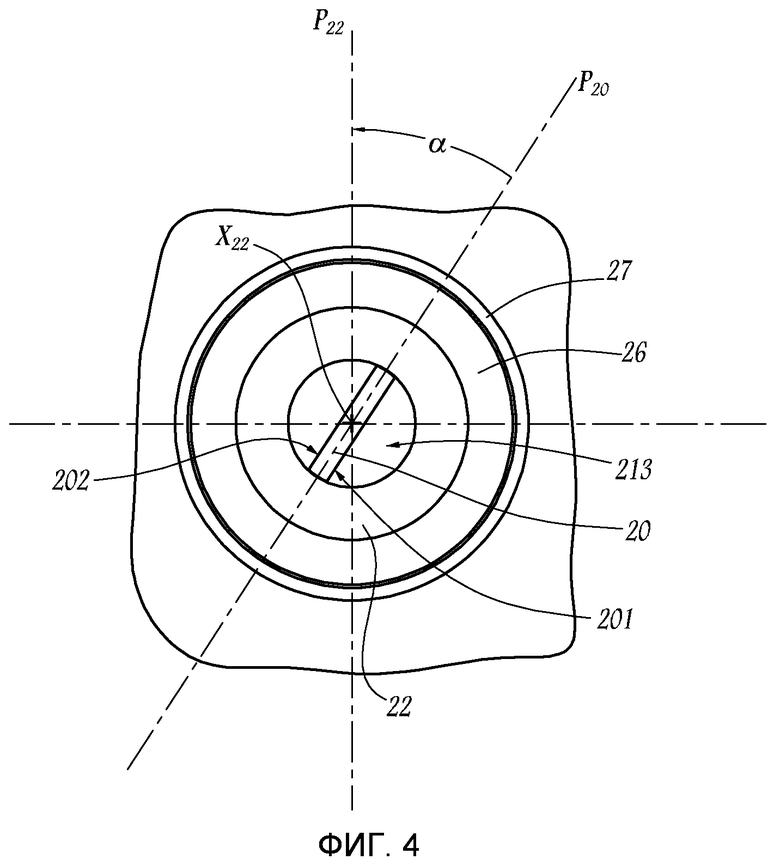
- фиг.4 представляет собой вид спереди в направлении стрелки F1, показанной на фиг.2, крылышка, подвижного по вращательному движению, в положении, соответствующем распределению скорости, показанному на фиг.3;
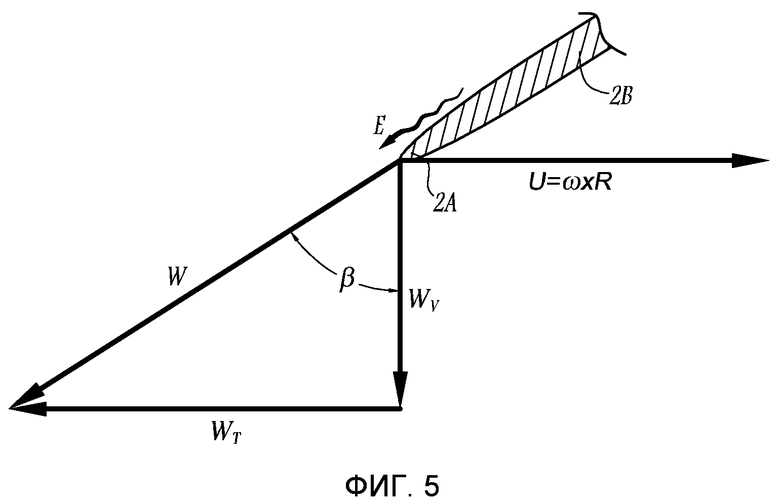
- фиг.5 представляет собой схематичный вид, аналогичный фиг.3, в том случае, когда данная установка функционирует в других условиях;
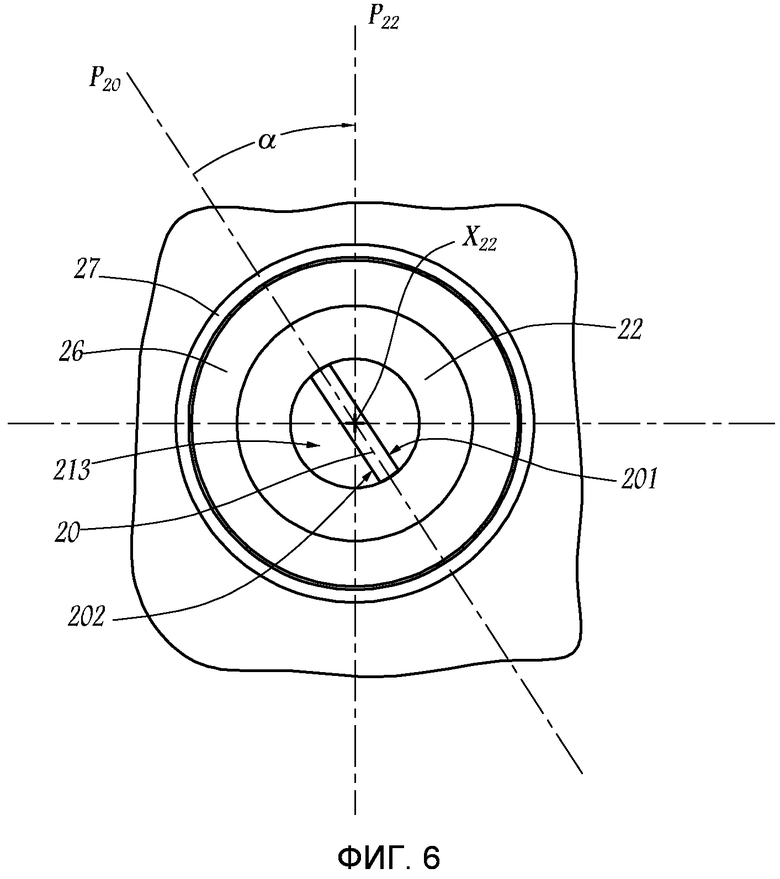
- фиг.6 представляет собой вид, аналогичный виду, показанному на фиг.4, в том случае, когда данная установка функционирует в условиях, представленных на фиг.5;
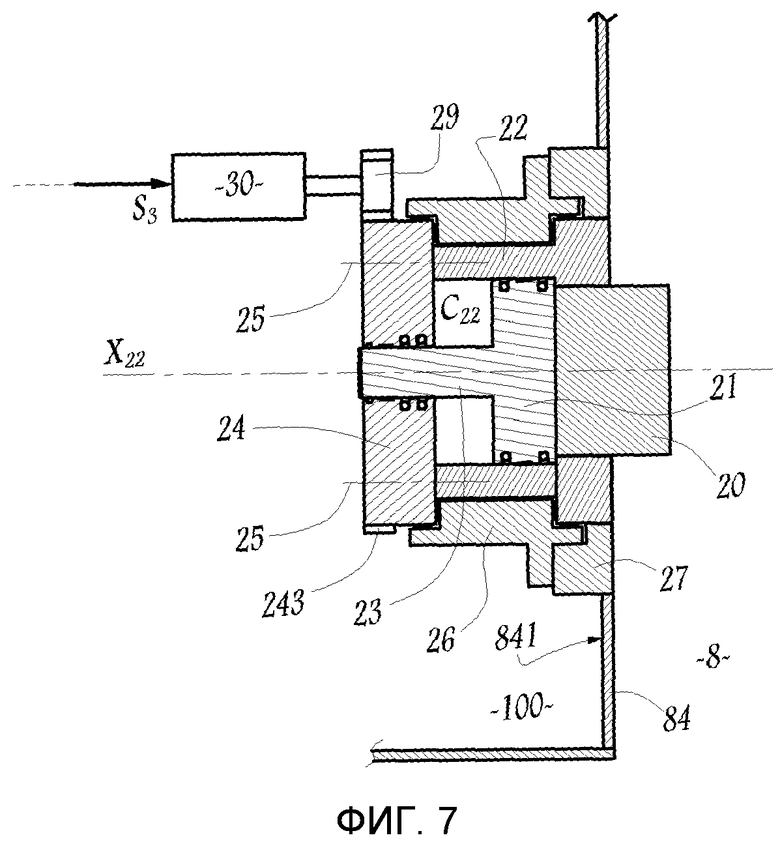
- фиг.7 представляет собой вид, аналогичный виду, показанному на фиг.2, для установки, выполненной в соответствии со вторым вариантом осуществления предлагаемого изобретения.
Установка I, представленная на фигурах с 1 по 6, имеет в своем составе турбину 1 типа Francis, в которой колесо 2 предназначено для его приведения во вращательное движение относительно вертикальной оси Х2 при помощи потока Е воды под давлением, поступающей из водохранилища, не показанного на приведенных фигурах. Вал 3, жестко связанный с этим колесом 2, соединяется с генератором 4 переменного тока, который выдает переменный ток в сеть, не показанную на приведенных фигурах, в зависимости от вращения колеса 2. Таким образом, установка I позволяет преобразовать гидравлическую энергию течения потока Е воды в электрическую энергию. Эта установка I может иметь в своем составе несколько турбин 1, запитываемых из упомянутого водохранилища. В качестве варианта реализации, вал 3 может быть присоединен к механической системе, причем в этом случае установка I обеспечивает преобразование гидравлической энергии течения потока Е воды в механическую энергию.
Питающий канал 5 позволяет подводить поток Е к колесу 2 и проходит между водохранилищем и кожухом 6 водяной турбины, оборудованным прибором 61 управления, который обеспечивает регулирование потока Е. Канал 8 предусматривается на выходе турбины 1 для того, чтобы обеспечить отведение потока Е воды и направить его в русло малой или большой реки, из которой запитывается водохранилище. Этот канал 8 иногда квалифицируется как всасывающий канал.
Блок 10 управления предусматривается для того, чтобы обеспечить управление турбиной 1 в зависимости, в частности, от потребностей в электрической энергии в сети, питаемой от генератора 4 переменного тока, и от расхода воды, располагаемой для формирования течения потока Е. Этот блок 10 имеет возможность определять несколько режимов функционирования установки I и направлять, соответственно в генератор 4 переменного тока и в приборы 61 управления, управляющие сигналы S1 и S2.
Канал 8 содержит входную часть 81, располагающуюся по существу вертикально, имеющую форму усеченного конуса и центрированную на оси Х2 вращения колеса 2. Этот канал 8 также содержит выходную часть 82, центрированную на оси Х82, располагающейся по существу горизонтально. Эта ось Х82 является по существу горизонтальной в том смысле, что она образует с горизонтальной плоскостью угол, имеющий величину менее 20°. На практике ось Х82 может быть слегка поднимающейся в направлении течения потока Е. Колено 83, изогнутое под углом 90°, связывает части 81 и 82 канала 8.
Для того чтобы стабилизировать течение потока Е после того, как этот поток пройдет через колесо 2, канал 8 в своей входной части 81 снабжен несколькими крылышками 20, которые выступают от стенки 84 входной части 81 в направлении оси Х2. Эти крылышки 20 предназначены для того, чтобы их обтекала часть потока Е, который протекает, после выхода из колеса 2, вдоль стенки 84. Таким образом, эти крылышки оказывают влияние на течение потока Е в канале 8 отведения или всасывания.
Вид, показанный на фиг.1, представляет собой сечение в вертикальной плоскости, содержащей ось Х2, и демонстрирует два крылышка 20. На практике количество крылышек 20 выбирается в зависимости от диаметра части 81 и расхода потока Е. Как это более конкретно следует из вида, показанного на фиг.2, каждое крылышко 20 жестко связано с поршнем 21, установленным в цилиндрическом корпусе 22 на круглом основании, центрированном на оси Х22, перпендикулярной к стенке 84. Поршень 21 оборудован уплотнительными прокладками 211 и 212 герметизации и жестко связан со штоком 23, который проходит сквозь пластину 24 в форме диска с возможностью скольжения по отношению к этой пластине вдоль оси Х22. Эта пластина 24 оборудована уплотнительными прокладками 241 и 242 герметизации, которые обеспечивают, вместе с уплотнительными прокладками 211 и 212, жидкостную изоляцию по отношению к внешней среде камеры С22, сформированной в радиальном направлении внутри корпуса 22 между пластиной 24 и поршнем 21 и вокруг штока 23.
Как это следует из вида, показанного на фиг.4, каждое крылышко 20 проходит по одну и по другую стороны от соответствующей оси Х22. На практике каждое крылышко 20 является центрированным на оси Х22. Пластина 24 закрепляется на корпусе 22 посредством винтов 25, представленных на фиг.2 их осевыми линиями.
Камера С22 запитывается, через не показанный на приведенных фигурах канал, водой, поступающей из канала 5. Это позволяет создать давление в камере С, следствием чего является проталкивание поршня 21 в направлении, показанном стрелкой F2 на фиг.2, и выдвигание крылышка 20 в направлении оси X по отношению к стенке 84.
Подсистема, образованная деталями с 20 по 25, устанавливается с возможностью вращения относительно оси Х22 в рубашке 26, неподвижно закрепленной в кольце 27, фиксированном по отношению к стенке 84.
Уплотнительные прокладки, образующие подшипник, располагаются, в случае необходимости, в радиальном направлении вокруг корпуса 22 и пластины 24 и обеспечивают возможность вращения упомянутой выше подсистемы по отношению к рубашке 26.
В своей части, которая выступает в осевом направлении вдоль оси Х22 по отношению к рубашке 26, венец 24 снабжен наружными радиальными зубцами 243, входящими в зубчатое зацепление с шестерней 29, приводимой в движение при помощи выходного вала 301 электрического серводвигателя 30. Этот двигатель управляется при помощи блока 10 посредством электронного сигнала S3.
Этот серводвигатель 30 позволяет, таким образом, приводить во вращательное движение подсистему, образованную деталями с 20 по 25, относительно оси Х22 в зависимости от управляющего сигнала S3, принимаемого блоком 10.
Это вращательное движение позволяет изменять угловое положение крылышка 20 относительно оси Х22. Каждое крылышко 20 оказывается, таким образом, ориентируемым относительно оси Х22. Как это следует из фиг.4 и 6, крылышко 20 имеет форму плоской пластины, и его угловое положение может быть измерено при помощи угла α, отсчитываемого над осью Х22, между плоскостью Р20, являющейся средней между большими боковыми сторонами 201 и 202 крылышка 20, и вертикальной плоскостью Р22, в которой располагается ось Х22.
Двигатель 30 позволяет, для каждой подвижной лопатки 20, адаптировать ее угловое положение относительно оси Х22 к условиям течения потока Е в канале 8.
На фиг.3 представлено, на развернутом виде внешнего пояса колеса 2, распределение скоростей в непосредственной близости от задней кромки 2А лопатки 2 В колеса 2. Полагая, что это колесо 2 вращается с угловой скоростью ω, получается, что тангенциальная скорость U его задней кромки 2А равна произведению ω×R, где R представляет собой радиальное расстояние, или радиус, между этой кромкой 2А и осью Х2. В то же время, если рассматривать скорость W течения потока воды на выходе из колеса 2, эта скорость W располагается в продолжении лопатки 2В. Эта скорость W раскладывается на вертикальную составляющую Wv, то есть составляющую, параллельную оси Х2, и тангенциальную составляющую Wт.
В конфигурации с небольшим расходом Q для течения потока Е, как это представлено на фиг.3, вертикальная составляющая Wv скорости является относительно небольшой и, поскольку угол β наклона вектора скорости W по отношению к вертикали является фиксированным в результате геометрических характеристик лопатки 2В, тангенциальная составляющая Wт скорости имеет модуль 

Это вызывает образование турбулентных факелов в канале 8 со значительными изменениями давления, что может быть откорректировано крылышками 20, если они правильно позиционированы.
В том случае, когда течение потока Е имеет значительный расход Q, вертикальная составляющая Wv скорости W имеет значительный модуль и, поскольку угол β является фиксированным вследствие геометрических характеристик лопатки 2В, тангенциальная составляющая Wт имеет модуль, превышающий модуль тангенциальной скорости U. В этом случае, представленном на фиг.5, течение потока Е выбрасывается в направлении влево на фиг.5 и может быть представлено стрелкой Е на этой фигуре. В этом случае поток Е вращается в противоположном направлении по отношению к вращению колеса 2 в том случае, когда этот поток выбрасывается из этого колеса. Здесь также создаются турбулентные факелы со значительными флюктуациями давления, что может быть откорректировано крылышками 20.
Таким образом, в соответствии с величиной расхода Q направление вращения потока Е относительно оси Х2 в канале всасывания 8 изменяется. Угловое положение крылышек 20 позволяет влиять на это вращение потока Е следующим образом:
i) при небольшом расходе Q, если режим функционирования таков, что стремятся только существенно уменьшить изменения давления, не заботясь при этом о падении коэффициента полезного действия, каждое крылышко 20 поворачивают на положительный угол α, в представлении на фиг.4, для того чтобы в максимально возможной степени замедлить вращательное течение потока воды в канале 8 всасывания;
ii) также при небольшом расходе Q и если режим функционирует, также представляет изменения давления, но на меньшем уровне, чем в рассмотренном выше случае i), крылышко 20 может быть ориентировано под отрицательным углом α, по фиг.4, для того чтобы создавать уменьшенное негативное влияние на коэффициент полезного действия данной установки, немного уменьшая при этом изменения давления;
iii) в случае большого расхода Q направление вращения течения потока в канале всасывания является обратным, и выводы для двух описанных выше режимов функционирования являются противоположными. Для того чтобы это сделать, угол α, образованный крылышком 20 и вертикалью, может быть отрегулирован таким образом, чтобы обеспечить желаемый эффект. При этом если ориентировать крылышко в направлении, по существу параллельном течению потока, влияние на коэффициент полезного действия оказывается незначительным. Зато в том случае, когда необходимо существенно уменьшить изменения давления для того или иного режима функционирования, можно повернуть крылышко таким образом, чтобы оно противодействовало течению. Это снижение изменений давления оказывает относительно большое отрицательное влияние на коэффициент полезного действия, но это отрицательное влияние существует только для рассматриваемого режима функционирования, причем угол α ориентации крылышек 20 относительно осей Х22 может быть заново отрегулирован иным образом для других режимов функционирования.
Итак, угол α ориентации каждого крылышка 20 регулируют таким образом, чтобы обеспечить наилучший компромисс между изменениями давления и коэффициентом полезного действия.
В том случае, когда расход потока Е и скорость вращения колеса 2 являются такими, что модули 

Регулирование углового положения крылышек 20 относительно их осей Х22 вращения может быть осуществлено эмпирическим путем, оценивая, апостериори, влияние этого их положения на коэффициент I полезного действия данной установки и на уровень изменений давления. Предпочтительным образом блок 10 обеспечивает автоматическое управление ориентируемыми крылышками 20 в зависимости от сигнала S4, выдаваемого датчиком 12 расхода, установленным на канале 5. Этот датчик расхода может представлять собой датчик любого подходящего типа и может быть реализован, например, на основе дифференциальных датчиков давления. В первом приближении и полагая, что колесо 2 вращается с по существу постоянной угловой скоростью, что соответствует случаю машин, оборудованных синхронным генератором переменного тока, имеется возможность вычислить в блоке 10 тангенциальные скорости WT и U на основании расхода Q потока Е и определить на основе этого направление выхода потока Е по отношению к направлению вращения колеса, а именно в том же направлении или в противоположном направлении. При этом блок 10 имеет возможность определить ту угловую ориентацию, которая должна быть придана крылышкам 20 относительно их соответствующих осей Х22 для того, чтобы стабилизировать поток Е.
В качестве варианта реализации или дополнительно к описанному способу реализации, имеется возможность установить тахометр 14 на вал 3 и подавать в блок 10 сигнал S5, характеризующий скорость вращения вала 3, что позволяет точно знать величину тангенциальной скорости U. Этот сигнал S5 может быть интегрирован при помощи блока 10 для того, чтобы определить величину угла наклона α, который должен быть придан каждому из крылышек 20 для того, чтобы обеспечить стабилизацию потока Е во всасывающем трубопроводе 8.
Каждая рубашка 26 завинчивается в венец 27, и в том случае, когда требуется вмешательство в работу одной из подсистем с 20 по 25 для выполнения ее технического обслуживания, достаточно вывинтить соответствующую рубашку 26 из венца 27 для того, чтобы получить доступ из входной части 81 канала 8 к конструктивным элементам этой подсистемы. Опорные элементы и элементы позиционирования крылышек располагаются в ложементе 90, выполненном в изготовленной из бетона конструкции данной установки и размещенном радиально снаружи на стенке 84, как это представлено только на фиг.2.
В качестве варианта реализации и как это представлено на фиг.7, галерея 100 доступа к наружной поверхности 841 стенки 84 может быть выполнена в радиальном направлении вокруг части 81 канала 8, что позволяет реализовать операции технического обслуживания на крылышках 20 и их органах приведения в движение из этой галереи. При этом форма рубашки 26 и форма венца 27 адаптируются соответствующим образом.
На этой фигуре 7 элементы, аналогичные элементам, соответствующим первому способу реализации, обозначены теми же цифровыми позициями, и крылышко 20 жестко связано с поршнем 21, который продолжает шток 23, скользящий в пластине 24, жестко связанной с корпусом 22 при помощи винтов 25. Рубашка 26 охватывает подсистему, образованную деталями с 20 по 25, и привинчивается на венец 27 из галереи 100. Серводвигатель 30 приводит во вращательное движение шестерню 29, находящуюся в зацеплении с наружными зубьями 243 пластины 24, что позволяет контролировать угловую ориентацию крылышка 20 относительно оси Х22, перпендикулярной к стенке 84, как об этом уже было сказано при описании первого способа реализации.
В двух этих способах реализации давление питания камеры С22 позволяет контролировать расположение, вдоль оси Х22, поршня 21 и крылышка 20. В частности, в том случае, когда течение потока в канале 8 является стабилизированным, имеется возможность не запитывать камеру С22 водой под давлением с тем, чтобы крылышко 20 втягивалось или погружалось по отношению к стенке 84 в направлении наружу относительно канала 8 вследствие давления воды на поверхность 213 поршня 21, обращенную в направлении канала 8.
В качестве варианта реализации положение каждого крылышка вдоль его оси вращения Х22 может регулироваться при помощи средств, отличных от камеры давления, запитываемой водой. Для этого можно использовать, например, электрический серводвигатель или же гидравлический, механический или электрический силовой цилиндр.
Поршень 21, серводвигатель или же упомянутый выше силовой цилиндр позволяют, таким образом, управлять погружением каждого крылышка 20 в стенку 84, принимая во внимание параметр, являющийся репрезентативным для течения потока Е, как об этом уже было сказано выше по отношению к тому, что касалось угловой ориентации упомянутых крылышек.
Предлагаемое изобретение, описанное выше, представлено на приведенных фигурах для случая, когда ось Х22 вращения крылышек 20 является перпендикулярной по отношению к стенке 84. Однако это не является обязательным и здесь достаточно того, чтобы эта ось Х22, которая является фиксированной по отношению к стенке 84, являлась пересекающей по отношению к этой стенке. На практике, если ось Х22 не является перпендикулярной к стенке 84, величина острого угла, который эта ось образует с упомянутой стенкой, выбирается превышающей 45°, предпочтительным образом превышающей 75° и еще более предпочтительным образом превышающей 85°.
Предлагаемое изобретение было представлено здесь в двух вариантах его реализации с серводвигателем, связанным с каждым крылышком 20, что позволяет управлять крылышками индивидуально. При этом синхронизация между движениями крылышек обеспечивается при помощи блока 10 и его управления различными сигналами S3, предназначенными для различных двигателей 30.
В качестве варианта реализации можно использовать механические средства, связывающие между собой крылышки 20, что позволяет обеспечить групповое управление этими крылышками. Можно, например, использовать такие механические средства, как цепи или регулирующее кольцо, такие, которые известны, например, для управления направляющими лопатками 61.
Другие устройства также могут быть рассмотрены для обеспечения вращения крылышек 20 с индивидуальным или групповым управлением. На практике это вращение может быть обеспечено при помощи любого подходящего в данном случае приводного механизма, например при помощи вращательного или линейного подъемника, связанного с рычагом. Эти подъемники могут приводиться в действие при помощи масла под давлением, электрического тока, сжатого воздуха или воды под давлением. Техническое решение, в соответствии с которым используются работающие на воде подъемники, является предпочтительным, принимая во внимание рабочую среду, окружающую эти приводные механизмы.
Предлагаемое изобретение было представлено здесь в варианте его применения в совокупности с турбиной типа Francis. Однако оно может применяться и в совокупности с турбинами других типов, таких, например, как турбины типа Kaplan и турбины спирального типа, а также турбины-насосы.
Предлагаемое изобретение было представлено здесь в случае, когда все крылышки являются ориентируемыми, то есть подвижными по вращательному движению относительно секущей оси, в частности оси, перпендикулярной к стенке канала отведения. В качестве варианта реализации только некоторые из используемых крылышек могут быть ориентируемыми.
В соответствии с не представленным здесь вариантом реализации предлагаемого изобретения оно может быть использовано в том случае, когда колесо турбины оборудовано заостренной вершиной, имеющей целью усовершенствовать направляющее воздействие на течение потока позади колеса, например заостренной вершиной, известной из патентного документа WO-A-2005/038243.
Предлагаемое изобретение было описано выше для случая, когда расход потока Е используется для определения угловой ориентации крылышек 20. Однако для этого могут быть приняты во внимание и другие параметры, в частности высота падения Н на границе установки, мощность Р, выдаваемая данной установкой, или скорость вращения ω колеса 2.
В качестве варианта реализации крылышки 20 могут иметь форму, отличную от плоской.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОХЛАЖДЕНИЯ ВЕНЦА ЦЕНТРОБЕЖНОГО КОМПРЕССОРА | 2007 |
|
RU2433308C2 |
| ПРОТЕЗ КЛАПАНА, УСТАНАВЛИВАЕМЫЙ ПОСРЕДСТВОМ КАТЕТЕРА, И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2014 |
|
RU2666591C2 |
| УКУПОРОЧНОЕ СРЕДСТВО С ИНДИКАЦИЕЙ ПОВРЕЖДЕНИЯ, УПАКОВОЧНАЯ ТАРА И СПОСОБ ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2374156C2 |
| СИСТЕМА КОНЦЕВЫХ КРЫЛЫШЕК, ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ РАБОТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2628548C2 |
| УПАКОВОЧНАЯ МАШИНА ДЛЯ СИГАРЕТ | 1999 |
|
RU2228887C2 |
| ПРИВОДНОЙ КИНЕМАТИЧЕСКИЙ УЗЕЛ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2114766C1 |
| ТЕПЛОИЗОЛЯЦИОННЫЙ ЭКРАН ДЛЯ ИЗОЛЯЦИИ ЭЛЕКТРОМАГНИТНОГО ИНДУКТОРА И УСТАНОВКА ДЛЯ ТЕРМИЧЕСКОЙ ОБРАБОТКИ, СОДЕРЖАЩАЯ ТАКОЙ ЭКРАН | 2006 |
|
RU2416064C2 |
| ПОПЛАВКОВАЯ БЛОЧНАЯ ГИДРОЭЛЕКТРОСТАНЦИЯ НА ОСНОВЕ ПОДЛИВНЫХ ВОДЯНЫХ КОЛЕС С АКТИВНЫМИ ЛОПАСТЯМИ | 2016 |
|
RU2616333C1 |
| УСТРОЙСТВО И СПОСОБ АДАПТИВНОГО РЕГУЛИРОВАНИЯ АЭРОДИНАМИЧЕСКИХ ХАРАКТЕРИСТИК ЭЛЕМЕНТА КРЫЛА | 2006 |
|
RU2412863C2 |
| СООСНЫЙ ПОДУЗЕЛ ТРАНСМИССИЯ/ЦЕНТРАЛЬНАЯ ВТУЛКА УЗЛА НЕСУЩИХ ВИНТОВ БЕСПИЛОТНОГО ВОЗДУШНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 1993 |
|
RU2108269C1 |
Изобретение относится к установке, предназначенной для преобразования гидравлической энергии в электрическую или механическую энергию. Установка (I) для преобразования гидравлической энергии в электрическую или в механическую энергию имеет в своем составе гидравлическую турбину (1), канал (5) подведения к этой турбине потока (Е) воды под давлением, канал (8) отведения потока, выходящего из турбины, и направляющие крылышки (20) для течения потока в канале отведения. Каждое направляющее крылышко (20) является подвижным по вращательному движению относительно оси (Х22), пересекающей стенку (84) канала отведения. Установка имеет в своем составе средства управления угловым положением крылышка относительно оси его вращения, включающие блок 10 и серводвигатель. Каждое крылышко (20), подвижное по вращательному движению, является убирающимся в стенку (84) канала (8) отведения. Установка содержит поршень, выполненный с возможностью регулировать погружение крылышка (20) в стенку (84). Изобретение направлено на стабилизацию течения потока, проходящего через канал отведения, без уменьшения коэффициента полезного действия установки в различных режимах функционирования установки. 2 н. и 9 з.п. ф-лы, 7 ил.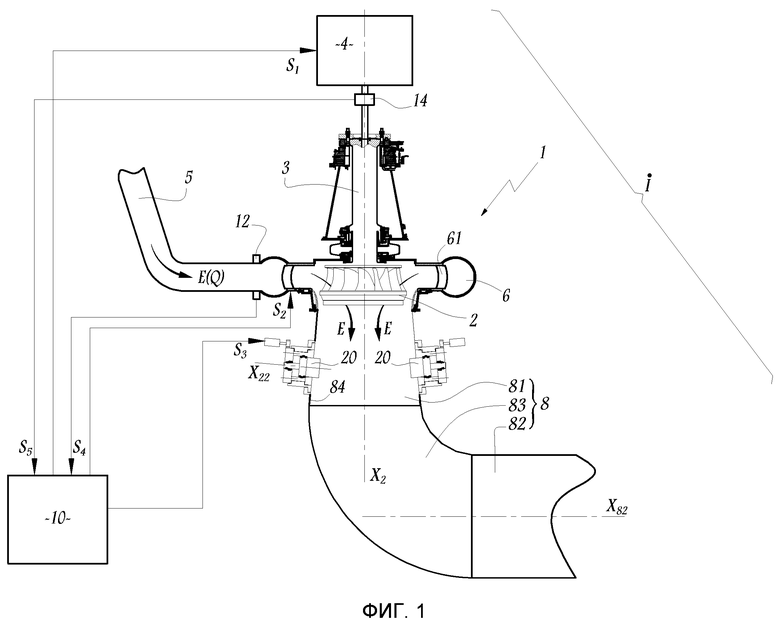
1. Установка (I) для преобразования гидравлической энергии в электрическую или в механическую энергию, причем эта установка имеет в своем составе гидравлическую турбину (1), канал (5) подведения к этой турбине потока (Е) воды под давлением, канал (8) отведения потока, выходящего из турбины, и направляющие крылышки (20) для течения потока в канале отведения, отличающаяся тем, что каждое направляющее крылышко (20) является подвижным по вращательному движению относительно оси (Х22), пересекающей стенку (84) канала отведения, причем установка имеет в своем составе средства управления угловым положением (α) крылышка относительно оси его вращения, включающие блок (10) и серводвигатель (30), причем каждое крылышко (20), подвижное по вращательному движению, является убирающимся в стенку (84) канала (8) отведения, при этом установка содержит поршень (21), выполненный с возможностью регулировать погружение крылышка (20) в упомянутую стенку.
2. Установка по п.1, отличающаяся тем, что средства управления выполнены с возможностью фиксировать угловое положение (α) направляющего крылышка (20) в зависимости от по меньшей мере одного параметра (Q, ω, Н, Р), являющегося характеристикой потока (Е), где
Q - расход потока Е;
ω - угловая скорость вращения колеса 2;
Н - высота падения на границе установки;
Р - мощность, вырабатываемая установкой.
3. Установка по одному из пп. 1 или 2, отличающаяся тем, что одно, или каждое, крылышко (20), подвижное по вращательному движению, является демонтируемым по отношению к стенке (84) канала (8) отведения с внутренней стороны этого канала.
4. Установка по одному из пп. 1 или 2, отличающаяся тем, что она содержит галерею (100) доступа на наружной поверхности (841) стенки (84) канала (8) отведения, а также тем, что одно, или каждое, крылышко (20) является демонтируемым по отношению к этой стенке из упомянутой галереи.
5. Установка по одному из пп. 1 или 2, отличающаяся тем, что каждое крылышко (20) жестко связано с поршнем (21), установленным с возможностью скольжения параллельно оси (Х22) вращения этого крылышка по отношению к венцу (27), закрепленному на стенке, тем, что подсистема, имеющая в своем составе крылышко (20), поршень (21), корпус (22), шток (23), пластину (24) и винты (25), устанавливается с возможностью вращения относительно оси вращения этого крылышка, причем подсистема содержит зубья (243), обеспечивающие взаимодействие со средствами приведения упомянутой подсистемы во вращательное движение относительно оси (Х22) вращения крылышка, включающими в себя шестерню (29) и серводвигатель (30).
6. Установка по одному из пп. 1 или 2, отличающаяся тем, что каждое подвижное крылышко (20) проходит по одну и по другую стороны от оси (Х22) его вращения.
7. Способ управления установкой (1) по п.1, включающий этап управления (S3) посредством блока (10) управления и серводвигателя (30) угловым положением (α) каждого направляющего крылышка (20) для течения потока (Е) в канале отведения относительно оси (Х22), пересекающей стенку (84) канала (8) отведения, и этап управления с возможностью регулирования положением каждого крылышка (20), выполненного с возможностью погружения в стенку (84) канала (8) отведения.
8. Способ по п.7, отличающийся тем, что угловое положение крылышка (20) управляется в зависимости от по меньшей мере одного параметра (Q, ω, Н, Р), являющегося характеристикой потока (Е), в частности в зависимости от расхода (Q) этого потока (Е), где
ω - угловая скорость вращения колеса 2;
Н - высота падения на границе установки;
Р - мощность, вырабатываемая установкой.
9. Способ по одному из пп. 7 или 8, отличающийся тем, что упомянутая установка содержит несколько крылышек (20), распределенных на стенке (84) канала (8) отведения, при этом положение этих крылышек управляется групповым образом.
10. Способ по одному из пп. 7 или 8, отличающийся тем, что упомянутая установка содержит несколько крылышек (20), распределенных на стенке (84) трубопровода (8) отведения, при этом положение каждого крылышка управляется индивидуальным образом.
11. Способ по одному из пп. 7 или 8, отличающийся тем, что положение каждого крылышка (20), выполненного с возможностью погружения в стенку (84) канала отведения, управляется путем запитывания, или не запитывания, водой под давлением, поступающей из канала (5) подведения, камеры (С22), выполненной в корпусе (22), принадлежащем к подсистеме, и ограниченной поршнем (21), жестко связанным с крылышком.
| JPS 57108468 A, 06.07.1982 | |||
| US 4017211 A, 12.04.1977 | |||
| JPS 52066128 A, 01.06.1977 | |||
| JPH 4063969 A, 28.02.1992 | |||
| Аналоговое запоминающее устройство | 1979 |
|
SU799013A1 |
| Направляющий аппарат гидромашины | 1985 |
|
SU1321900A1 |

