Изобретение относится к авиационной технике, в частности к блокам ориентации.
Известен блок ориентации курсовой системы [1], содержащий блок датчиков первичной информации, аналого-цифровой преобразователь (АЦП), вычислительную машину (ВМ).
Недостатком данного устройства является отсутствие в нем преобразователя сигналов вращающегося трансформатора в цифровой код.
Известен также блок ориентации [2], содержащий блок датчиков первичной информации, АЦП, ВМ.
Недостатком данного устройства является отсутствие в нем преобразователя сигналов вращающегося трансформатора в цифровой код.
Заявленное изобретение направлено на расширение функциональных возможностей блока ориентации интегрированной системы резервных приборов.
Поставленная задача достигается тем, что в устройство для включения блока ориентации интегрированной системы резервных приборов в пилотажно-навигационный комплекс, в состав которого входит вращающийся трансформатор, содержащее блок датчиков первичной информации, АЦП, ВМ, согласно изобретению введены формирователь внешнего интерфейса, микроконтроллер со встроенным в него АЦП, нуль-орган, подключенный к микроконтроллеру, соединенные последовательно узел гальванической развязки и синхронизатор, подключенный к микроконтроллеру, выход которого подключен через формирователь внешнего интерфейса к ВМ, и два канала преобразования, каждый из которых содержит переключатель и последовательно соединенные буфер, подключенный ко входу нуль-органа, инвертор, компаратор, выход которого подключен к микроконтроллеру и входу управления переключателя, выход которого подключен ко входу АЦП, встроенного в микроконтроллер, а входы подключены ко входу и выходу инвертора, при этом вход буфера одного канала подключен к синусной обмотке вращающегося трансформатора, вход буфера другого канала подключен к косинусной обмотке вращающегося трансформатора, а вход узла гальванической развязки подключен к источнику внешнего опорного напряжения, питающего обмотку возбуждения вращающегося трансформатора, входящего в состав пилотажно-навигационного комплекса.
К существенным отличиям предложенного устройства относится введение в него формирователя внешнего интерфейса, микроконтроллера со встроенным в него АЦП, нуль-органа, подключенного к микроконтроллеру, соединенных последовательно узла гальванической развязки и синхронизатора, подключенного к микроконтроллеру, выход которого подключен через формирователь внешнего интерфейса к ВМ, и двух каналов преобразования, каждый из которых содержит переключатель и последовательно соединенные буфер, подключенный ко входу нуль-органа, инвертор, компаратор, выход которого подключен к микроконтроллеру и входу управления переключателя, выход которого подключен ко входу АЦП, встроенного в микроконтроллер, а входы подключены ко входу и выходу инвертора, при этом вход буфера одного канала подключен к синусной обмотке вращающегося трансформатора, вход буфера другого канала подключен к косинусной обмотке вращающегося трансформатора, а вход узла гальванической развязки подключен к источнику внешнего опорного напряжения, питающего обмотку возбуждения вращающегося трансформатора, входящего в состав пилотажно-навигационного комплекса.
При таком включении происходит преобразование аналоговых сигналов, пропорциональных синусу и косинусу угла поворота вращающегося трансформатора, в цифровую информацию о текущем значении угла, необходимую для передачи в пилотажно-навигационный комплекс.
Предлагаемое изобретение иллюстрируется чертежом, на котором представлена структурная схема, содержащая блок 1 датчиков первичной информации, АЦП 2, ВМ 3, формирователь 4 внешнего интерфейса, микроконтроллер 5, АЦП 6, встроенный в микроконтроллер 5, нуль-орган 7, устройство 8 гальванической развязки, синхронизатор 9, каналы 10, 11 преобразования, переключатель 12, буфер 13, инвертор 14, компаратор 15, синусную 16 и косинусную 17 обмотки вращающегося трансформатора, источник 18 внешнего опорного напряжения, обмотку 19 вращающегося трансформатора, пилотажно-навигационный комплекс 20.
Блок 1 датчиков первичной информации подключен через АЦП 2 к ВМ 3, к которой через формирователь 4 внешнего интерфейса подключен микроконтроллер 5, к которому подключен нуль-орган 7 и последовательно соединенные синхронизатор 9 и устройство 8 гальванической развязки, соединенные с источником 18 опорного напряжения и обмоткой 19 возбуждения вращающегося трансформатора. В каждом из каналов 10, 11 преобразования последовательно соединены буфер 13, подключенный ко входу нуль-органа, инвертор 14 и компаратор 15, выход которого подключен к микроконтроллеру 5 и входу управления коммутатора 12, выход которого подключен ко входу АЦП 6, встроенного в микроконтроллер 5, а входы подключены ко входу и выходу инвертора 14, при этом входы буфера 13 одного канала 10 подключены к синусной 16 обмотке, а другого канала 11 - к косинусной 17 обмотке вращающегося трансформатора, входящего в состав пилотажно-навигационного комплекса 20.
Устройство работает следующим образом. Блок 1 датчиков первичной информации выдает текущие значения параметров в виде аналоговых электрических сигналов, которые с помощью АЦП 2 преобразуются в цифровой код, поступающий на ВМ 3, где производится вычисление параметров полета. С пилотажно-навигационного комплекса 20 приходят в виде синусоидальных напряжений аналоговые сигналы с синусной 16 и косинусной 17 обмоток вращающегося трансформатора пропорциональные соответственно синусу и косинусу угла поворота летательного аппарата. Эти сигналы поступают для развязки на буферы 13 каналов преобразования 10, 11, инвертируются инвертором 14 и с помощью компаратора 15 преобразуются в последовательность прямоугольных импульсов, совпадающих по фазе с входным сигналом. Благодаря тому что синусный и косинусный сигналы имеют между собой определенные фазовые соотношения в различных квадрантах угла поворота, то на выходе компаратора 15 каналов преобразователя 10, 11 будет иметь место двухразрядный параллельный цифровой код, в котором содержится информация о текущем квадранте угла поворота. Эта информация поступает на микроконтроллер 5. В каждом канале входные синусоидальные сигналы инвертируются и поступают на входы аналогового коммутатора 12, который через вход управления с компаратора 15 подключает прямой или инверсный сигналы ко входам АЦП 6, встроенного в микроконтроллер 5. Эти сигналы преобразуются в цифровой код, передаются в микроконтроллер 5, где производится их обработка по определенному алгоритму, формируется цифровой код, пропорциональный углу поворота вращающегося трансформатора, который через формирователь 4 внешнего интерфейса передается в ВМ 3. Для гальванической развязки и синхронизации обработки сигналов предназначено устройство 8 гальванической развязки и синхронизатор 9, соединенные последовательно, а для запуска рабочего цикла микроконтроллера 5 предусмотрен нуль-орган 7, определяющий точку перехода через нуль сигналами синусной 16 и косинусной 17 обмоток вращающегося трансформатора.
Таким образом, формирование цифрового кода, пропорционального синусу и косинусу текущего значения угла поворота вращающегося трансформатора, расширяет функциональные возможности предложенного устройства.
Предложенное устройство используется в блоке ориентации интегрированной системы резервных приборов.
Источники информации
1 Патент США №4347730, кл. 73/1E, 1982 г.
2 Юбилейная XV Санкт-Петербургская международная конференция по интегрированным навигационным системам. Сборник материалов. Санкт-Петербург 2008 г., стр.263. Компенсация магнитной девиации интегрированной системы резервных приборов, В.М. Самойлов, Д.В. Свяжин (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СОСТОЯНИЯ ВЫСОКОВОЛЬТНЫХ ВВОДОВ | 2009 |
|
RU2401434C1 |
| БЛОК КОНТРОЛЯ ДВУХ КУРСОВЕРТИКАЛЕЙ | 2002 |
|
RU2227934C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ ВЫСОКОВОЛЬТНЫХ ВВОДОВ | 2011 |
|
RU2452973C1 |
| УСТРОЙСТВО МОНИТОРИНГА ВЫСОКОВОЛЬТНЫХ ВВОДОВ И СИГНАЛИЗАЦИИ О СОСТОЯНИИ ИХ ИЗОЛЯЦИИ | 2006 |
|
RU2328009C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ ИНТЕГРИРОВАННОЙ СИСТЕМЫ РЕЗЕРВНЫХ ПРИБОРОВ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2014 |
|
RU2564828C1 |
| СПОСОБ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2664128C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377501C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА ПОВОРОТА РОТОРА ДАТЧИКА УГЛА ТИПА СИНУСНО-КОСИНУСНОГО ВРАЩАЮЩЕГОСЯ ТРАНСФОРМАТОРА | 2015 |
|
RU2598309C1 |
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ АВИАГОРИЗОНТА В ПИЛОТАЖНЫЙ КОМПЛЕКС | 2002 |
|
RU2213938C1 |
| Преобразователь угла поворота вала в код | 1984 |
|
SU1211882A1 |
Изобретение относится к авиационной технике, в частности к блокам ориентации. Устройство содержит вращающийся трансформатор, блок датчиков первичной информации, АЦП, вычислительную машину, формирователь внешнего интерфейса, микроконтроллер с АЦП, нуль-орган, узел гальванической развязки, синхронизатор и два канала преобразования, каждый из которых содержит переключатель и последовательно соединенные буфер, подключенный ко входу нуль-органа, инвертор, компаратор, выход которого подключен к микроконтроллеру и входу управления переключателя, выход которого подключен ко входу АЦП, встроенного в микроконтроллер, а входы подключены ко входу и выходу инвертора. При этом вход буфера одного канала подключен к синусной обмотке вращающегося трансформатора. Вход буфера другого канала подключен к косинусной обмотке вращающегося трансформатора. Вход узла гальванической развязки подключен к источнику внешнего опорного напряжения, питающего обмотку возбуждения вращающегося трансформатора, входящего в состав пилотажно-навигационного комплекса. Технический результат заключается в расширении функциональных возможностей блока ориентации интегрированной системы резервных приборов. 1 ил.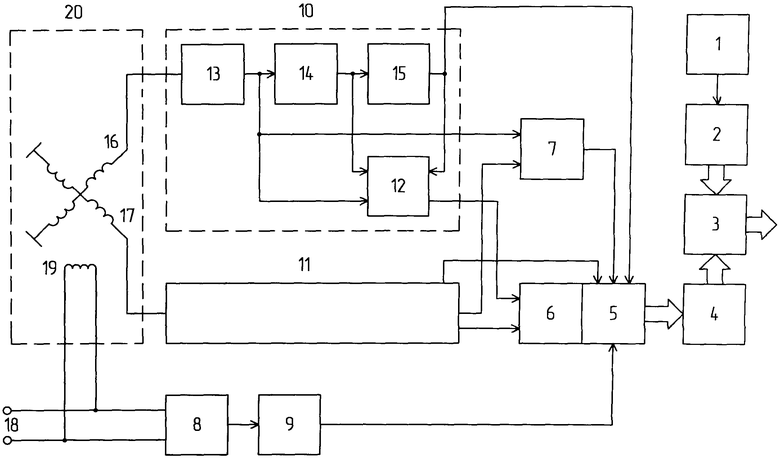
Устройство для включения блока ориентации интегрированной системы резервных приборов в пилотажно-навигационный комплекс, в состав которого входит вращающийся трансформатор, содержащее блок датчиков первичной информации, аналого-цифровой преобразователь, вычислительную машину, отличающееся тем, что в него дополнительно введены формирователь внешнего интерфейса, микроконтроллер со встроенным в него аналого-цифровым преобразователем, нуль-орган, подключенный к микроконтроллеру, соединенные последовательно узел гальванической развязки и синхронизатор, подключенный к микроконтроллеру, выход которого подключен через формирователь внешнего интерфейса к вычислительной машине, и два канала преобразования, каждый из которых содержит переключатель и последовательно соединенные буфер, подключенный ко входу нуль-органа, инвертор, компаратор, выход которого подключен к микроконтроллеру и входу управления переключателя, выход которого подключен ко входу аналого-цифрового преобразователя, встроенного в микроконтроллер, а входы подключены ко входу и выходу инвертора, при этом вход буфера одного канала подключен к синусной обмотке вращающегося трансформатора, вход буфера другого канала подключен к косинусной обмотке вращающегося трансформатора, а вход узла гальванической развязки подключен к источнику внешнего опорного напряжения, питающего обмотку возбуждения вращающегося трансформатора, входящего в состав пилотажно-навигационного комплекса.
| УСТРОЙСТВО ДЛЯ ВКЛЮЧЕНИЯ БЛОКА ОРИЕНТАЦИИ В ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 2008 |
|
RU2377501C1 |
| US 7119717 B2 10.10.2006 | |||
| Состав для тушения гидрид- и органохлорсиланов | 1984 |
|
SU1333347A1 |
| US 5760562 A 02.06.1998 | |||

