Изобретение относится к области автоматического контроля и регулирования и может быть использовано в современном электроприводе для создания цифрового преобразователя угла.
Известен цифровой преобразователь угла (ЦПУ), который содержит индукционный датчик угла, первый и второй функциональные цифроаналоговые преобразователи, первый, второй, третий, четвертый и пятый суммирующие усилители, первый и второй вычитающие усилители, первый, второй и третий коммутаторы, первый и второй блоки цифровых инверторов, первый, второй и третий цифровые инверторы, цифроаналоговый преобразователь, реверсивный счетчик, формирователь управляющих сигналов реверсивного счетчика, корректирующее звено, первый, второй, третий и четвертый демодуляторы, первое, второе и третье интегрирующие звенья, первый, второй, третий, четвертый, пятый и шестой управляемые аналоговые инверторы, первый и второй усилители-формирователи, перепрограммируемое запоминающее устройство, аналого-цифровой преобразователь, амплитудно-частотный нормализатор (патент РФ №2259631, H03M 1/48, опубликован 27.08.2005 г.).
К недостаткам данного ЦПУ можно отнести следующие.
Невысокая скорость преобразования из-за положенного в основу работы схемы принципа компенсации модуля величины рассогласования напряжения импульсной последовательностью, которая поступает на счетный вход реверсивного счетчика и применяемых в схеме нескольких интегрирующих звеньев, так как всякое реальное интегрирующее звено является звеном с запаздыванием.
Громоздкость устройства. Его функциональная схема содержит более 40 блоков и, как следствие этого,- сложность ее практической реализации
Затруднена всякая коррекция углового положения датчика из-за необходимости модификации ПЗУ для этого.
Схемой не учитываются возможные изменения параметров датчика в динамическом режиме его работы, например изменение коэффициента трансформации при нагреве.
Наиболее близким по полученным результатам является способ работы цифро-аналогового преобразователя (ЦПУ), который взят за прототип, в него входят: генератор напряжения возбуждения, выход которого соединен с обмоткой возбуждения двухфазного индукционного датчика угла (ДУ) типа синусно-косинусного вращающегося трансформатора (СКВТ); СКВТ-приемник, опорный вход которого соединен с выходом генератора напряжения возбуждения, синусный и косинусный входы соединены соответственно с синусным и косинусным выходами двухфазного индукционного датчика угла, а выход соединен с преобразователем напряжение-частота; реверсивный счетчик, вход которого соединен с выходом преобразователя напряжение-частота, а выход с цифровым входом СКВТ-приемника, дополнительно введены первый выпрямитель, вход которого соединен с выходом генератора напряжения возбуждения; второй выпрямитель, вход которого соединен с косинусным выходом двухфазного индукционного датчика угла; сумматор, первый и второй входы которого соединены соответственно с выходами первого и второго выпрямителей, а выход соединен с усилителем; аналого-цифровой преобразователь, информационный вход которого соединен с выходом усилителя, а опорный вход соединен с выходом первого выпрямителя; контроллер, первый и второй входы которого соединены соответственно с выходами реверсивного счетчика и выходом аналого-цифрового преобразователя, а выход соединен с шиной выходного кода N. Причем в цифровом преобразователе угла СКВТ-приемник состоит из электронного аналога, первого, второго и третьего компараторов, первого и второго D-триггеров, детектора с выходным фильтром низких частот, первого и второго аналоговых инверторов и аналогового сумматора. При этом выход генератора напряжения возбуждения подключен к первому входу третьего компаратора, а также второму входу третьего компаратора через детектор с выходным фильтром низких частот; синусный выход двухфазного индукционного датчика угла соединен с первым входом электронного аналога, аналоговым входом первого аналогового инвертора и первым входом первого компаратора, второй вход которого подключен к шине нулевого потенциала; косинусный выход двухфазного индукционного датчика угла соединен со вторым входом электронного аналога, аналоговым входом второго аналогового инвертора и вторым входом второго компаратора, первый вход которого подключен к шине нулевого потенциала; выход первого компаратора соединен с информационным входом первого D-триггера, тактовый вход которого подключен к выходу третьего компаратора, а выход - к управляющему входу первого аналогового инвертора; выход второго компаратора соединен с информационным входом второго D-триггера, тактовый вход которого подключен к выходу третьего компаратора, а выход - к управляющему входу второго аналогового инвертора; выходы первого и второго аналоговых инверторов через аналоговый сумматор подключены ко второму входу фазового детектора, первый вход которого соединен с выходом электронного аналога, а выход через преобразователь напряжение-частота соединен с управляющим входом двоичного реверсивного счетчика, поразрядные выходы которого подключены к соответствующим цифровым входам электронного аналога (Патент РФ №2533305, H03M 1/64, опубликованный 20.11.2014 г.).
Общим для этого изобретения и предлагаемого способа является то, что результат преобразования не зависит от возможного рассогласования фаз напряжения возбуждения датчика угла и его выходных напряжений, а также то, что результат преобразования постоянно корректируется при изменении коэффициента трансформации, например при изменении температуры окружающей среды.
К недостаткам прототипа можно отнести следующие:
- ограниченное быстродействие устройства из-за того, что при его работе в следящем режиме каждый цикл измерения должен заканчиваться установкой на выходе реверсивного счетчика значения кода N, при котором выполняется условие тождественности значения угла поворота датчика и N за счет подачи на счетчик числа импульсов, пропорционального рассогласованию, что не является оптимальным во времени.
- избыточность элементов, которые применяются для снижения погрешности преобразования из-за изменения коэффициента трансформации.
Целью предлагаемого изобретения является создание способа определения угла поворота ротора датчика угла типа синусно-косинусного вращающегося трансформатора, который за счет минимально-достаточного набора аппаратных и программных преобразований его выходных сигналов позволит повысить быстродействие и уменьшить массо-габаритные показатели реализованного этим способом устройства определения угла.
Поставленная задача решается тем, что в способе определения угла поворота ротора датчика угла типа синусно-косинусного вращающегося трансформатора, основанном на преобразовании выходных сигналов от него в цифровой код, вне зависимости от фазового рассогласования между напряжением возбуждения и выходными сигналами и с постоянной коррекцией результатов преобразования при изменении его коэффициента трансформации, связанного с изменением температуры окружающей среды, выходящие от датчика угла синусный и косинусный амплитудно-модулированные сигналы (АМС) поступают на первый и второй выпрямители, где их выпрямляют, а с них поступают на первый и второй интеграторы, где с выпрямленных сигналов получают огибающие положительных частей несущих составляющих синусного и косинусного АМС, сигналы с первого и второго интеграторов поступают на первый и второй аналого-цифровые преобразователи соответственно, где амплитуды огибающих положительных частей несущих составляющих синусного и косинусного АМС преобразуют в цифровые коды, которые поступают на блоки определения кодов огибающих несущих составляющих синусного и косинусного АМС, на эти блоки также поступают дискретные сигналы от первого и второго датчиков магнитного поля соответственно, которые, в свою очередь, получают сигнал от магнита, который вращают синхронно с ротором датчика угла, датчики магнитного поля располагают таким образом относительно полюсов магнита и положения ротора датчика угла, чтобы полупериоды сигналов от первого и второго датчиков магнитного поля совпадали по фазе с полупериодами огибающих несущих составляющих синусного и косинусного АМС соответственно, в блоках определения кодов огибающих несущих составляющих синусного и косинусного АМС из кодов амплитуд огибающих положительных частей несущих составляющих синусного и косинусного АМС определяют коды амплитуд огибающих несущих составляющих синусного и косинусного АМС соответственно, а по уровню дискретных сигналов от датчиков магнитного поля определяют знак этих кодов, что позволяет определить амплитуды огибающих несущих составляющих синусного и косинусного АМС на всем периоде их прохождения, из блоков определения кодов огибающих несущих составляющих синусного и косинусного АМС коды, соответствующие огибающим несущих составляющих синусного и косинусного АМС, поступают на блок вычисления кода угла поворота ротора, где по ним вычисляют код, соответствующий углу поворота ротора датчика угла по формуле:
θ=arctg(Uc/Uк),
где θ - угол поворота датчика угла,
Uc - амплитуда огибающей синусного амплитудно-модулированного сигнала в момент измерения,
Uк - амплитуда огибающей косинусного амплитудно-модулированного сигнала в момент измерения.
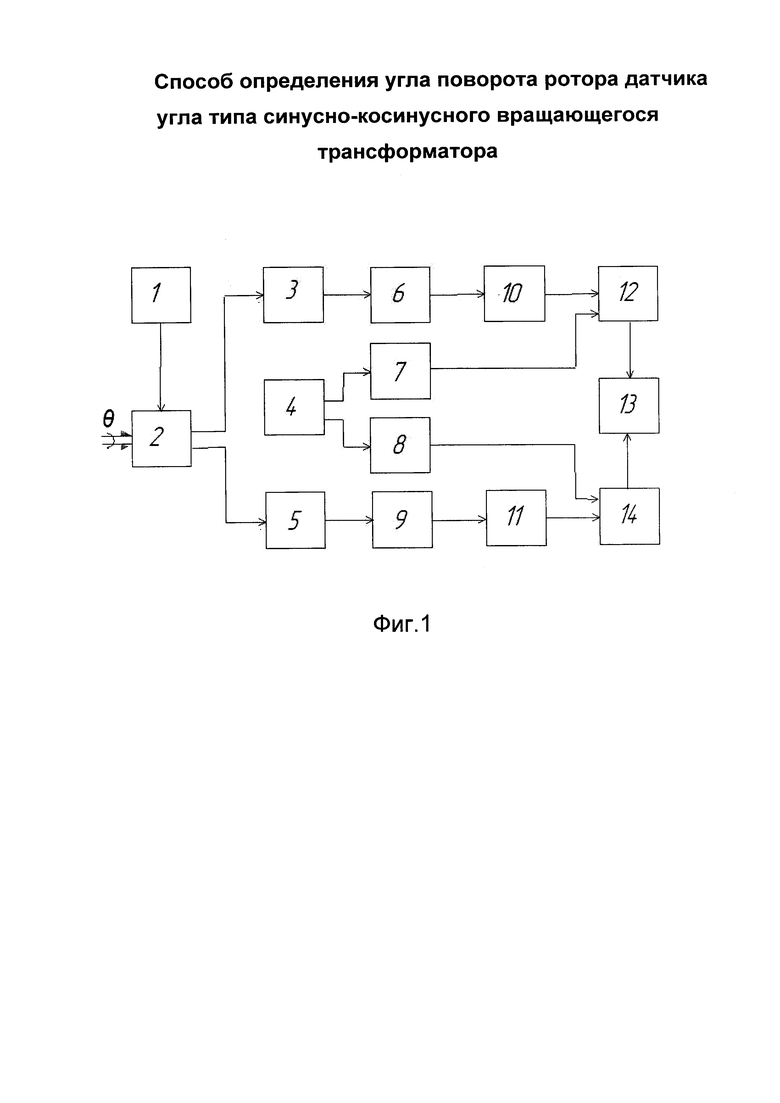
Для демонстрации сущности предлагаемого способа преобразования угла в цифровой код предлагается структурная схема устройства, которая приводится на фиг. 1. На фиг. 2 представлены кривые, интерпретирующие процесс преобразования угла поворота в код.
Устройство содержит:
1 - генератор;
2 - датчик угла (ДУ) типа синусно-косинусного вращающегося трансформатора (СКВТ);
3 - первый выпрямитель;
4 - магнит;
5 - второй выпрямитель;
6 - первый интегратор;
7 - первый датчик магнитного поля;
8 - второй датчик магнитного поля;
9 - второй интегратор;
10 - первый аналого-цифровой преобразователь (АЦП 1);
11 - второй аналого-цифровой преобразователь (АЦП 2);
12 - блок определения кодов огибающей несущей составляющей синусного амплитудно-модулированного сигнала (АМС);
13 - блок вычисления кода угла поворота ротора СКВТ;
14 - блок определения кодов огибающей несущей составляющей косинусного АМС.
Следует добавить, что совокупность блоков 10…14 может быть реализована на микроконтроллере типа STM32F103X или STM32F105X.
Способ реализуется следующим образом.
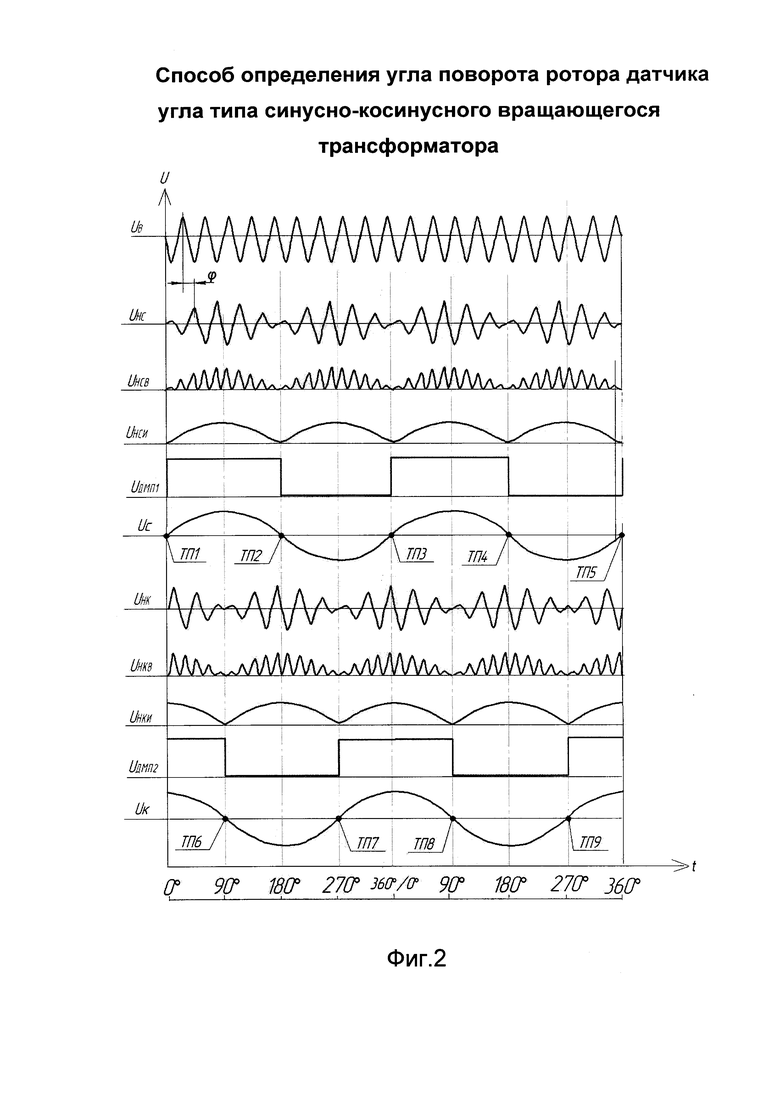
Обмотку возбуждения датчика угла ДУ 2 типа СКВТ питают от генератора 1 напряжением Uв, форма которого показана на фиг. 2.
Несущие составляющие синусного и косинусного АМС поступают от ДУ 2 на первый 3 и второй 5 выпрямители. На фиг. 2 эти сигналы обозначены как Uнс и Uнк.
Сигналы от выпрямителей, которые на фиг. 2 обозначены как Uнсв и Uнкв, поступают на первый 6 и второй 9 интеграторы, где из них получают огибающие положительных частей несущих составляющих синусного и косинусного АМС соответственно. Эти огибающие на фиг. 2 обозначены как Uнси и Uнки. Сигналы от интеграторов поступают на первый 10 и второй 11 аналого-цифровые преобразователи соответственно, где амплитуды огибающих положительных частей несущих составляющих синусного и косинусного АМС преобразуют в цифровые коды.
Первый датчик магнитного поля 7 и второй датчик магнитного поля 8 получают сигнал от магнита 4, который вращают синхронно с ротором датчика угла 2. Датчики магнитного поля 7, 8 располагают таким образом относительно полюсов магнита и положения ротора датчика угла 2, чтобы полупериоды сигналов от первого 7 и второго 8 датчиков магнитного поля совпадали по фазе с полупериодами огибающих несущих составляющих синусного и косинусного АМС соответственно, например, высокий уровень сигнала от датчика магнитного поля 7 совпадает по фазе с положительной частью периода огибающей несущей синусного АМС, а низкий уровень от датчика магнитного поля 7 совпадает по фазе с отрицательной частью периода огибающей несущей синусного АМС и чтобы фронты сигналов от датчиков магнитного поля 7, 8 совпадали с точками перехода, где амплитуды огибающих меняют свой знак на противоположный.
Коды от первого 10 и второго 11 аналого-цифровых преобразователей и сигналы от первого и второго датчиков магнитного поля, которые на фиг. 2 обозначены как Uдмп1 и Uдмп2, поступают на блок определения кодов огибающей несущей составляющей синусного АМС 12 и блок определения кодов огибающей несущей составляющей косинусного АМС 14 соответственно. В этих блоках из кодов, которые поступают из блоков 10 и 11 и которые определяют коды амплитуд огибающих положительных частей несущих составляющих синусного и косинусного АМС соответственно определяют коды амплитуд огибающих несущих составляющих синусного и косинусного АМС, а по уровню сигнала от первого 7 и второго 8 датчиков магнитного поля определяют знак этих кодов. Например, измеренные значения амплитуды огибающих положительных частей несущих составляющих синусного и косинусного АМС в фазе высокого уровня сигнала от датчика магнитного поля 7, 8 определяют как положительные, а измеренные их значения в фазе низкого уровня сигнала от датчиков магнитного поля 7, 8 определяют как отрицательные. По точкам, которые соответствуют полученным кодам, можно интерполировать огибающие несущих составляющих синусного и косинусного АМС, которые на фиг. 2 обозначены как Uc и Uк. Точки на этих кривых, обозначенные как ТП1…ТП9, находятся на линии фронтов сигналов от датчиков магнитного поля и являются точками перехода, где огибающие меняют свой знак на противоположный.
Процесс выделения кривых Uc и Uк в данном способе по своей сути является балансной демодуляцией синусного и косинусного АМС, поступающих с ДУ 2. Производится он независимо от фазы питающего его напряжения.
Знание значений амплитуд огибающих синусного и косинусного АМС Uc и Uк при каждом их измерении позволяет вычислительным средствам микроконтроллера определить угол поворота ДУ 2 по формуле:
θ=arctg(Uc/Uк),
где θ - угол поворота вала ДУ 2;
Uc - амплитуда огибающей синусного АМС в момент измерения;
Uк - амплитуда огибающей косинусного АМС в момент измерения.
Максимальные значения амплитуд огибающих синусного Uc и косинусного Uc АМС, по мере их определения в первом 10 и втором 11 аналого-цифровом преобразователях соответственно сравниваются с их первоначальными значениями, которые сохраняются в памяти микроконтроллера. При отличии этих значений от измеренных в начале работы происходит их программная коррекция вычислительными средствами микроконтроллера, что минимизирует погрешность преобразования при изменении коэффициента трансформации ДУ 2 при воздействии на него различных внешних факторов. Какие-либо дополнительные аппаратные средства для решения этой конкретной задачи, как это предлагается в прототипе, при использовании данного способа преобразования угла не применяют.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2533305C1 |
| БЫСТРОДЕЙСТВУЮЩИЙ МНОГОФУНКЦИОНАЛЬНЫЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА В КОД ДЛЯ УСТРОЙСТВ ЭЛЕКТРОМЕХАНОТРОНИКИ | 1994 |
|
RU2094945C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2008 |
|
RU2365032C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2012 |
|
RU2517055C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА, ЗЕНИТНОГО УГЛА И УГЛА МАГНИТНОГО НАКЛОНЕНИЯ | 1997 |
|
RU2131029C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308802C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2006 |
|
RU2308148C1 |
| Устройство для контроля зенитных углов и положения отклонителя в скважине | 1983 |
|
SU1155733A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА ПРИВОДА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2580153C1 |
Изобретение относится к области автоматического контроля и регулирования и может быть использовано в современном электроприводе для создания цифрового преобразователя угла. Техническим результатом является повышение быстродействия. Способ основан на программно-аппаратной демодуляции выходных амплитудно-модулированных сигналов (АМС) от датчика угла типа синусно-косинусного вращающегося трансформатора. В способе, за счет интегрирования выпрямленных сигналов несущих составляющих синусного и косинусного АМС, определяют огибающие положительных частей выпрямленных сигналов несущих составляющих синусного и косинусного АМС, а амплитуды этих огибающих преобразуют в цифровой код. По кодам амплитуд огибающих положительных частей выпрямленных сигналов несущих составляющих синусного и косинусного АМС определяют коды амплитуд огибающих несущих синусного и косинусного АМС, а их знак определяют по уровню сигналов от датчиков магнитного поля. 2 ил.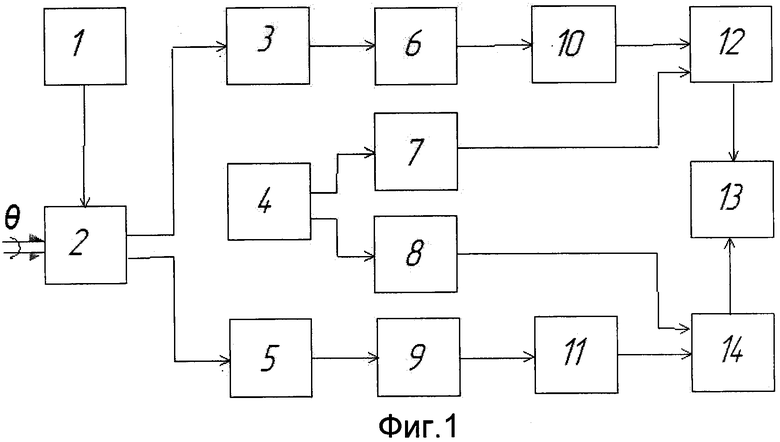
Способ определения угла поворота ротора датчика угла типа синусно-косинусного вращающегося трансформатора (СКВТ), основанный на преобразовании выходных сигналов от него в цифровой код, вне зависимости от фазового рассогласования между напряжением возбуждения и выходными сигналами и с постоянной коррекцией результатов преобразования при изменении его коэффициента трансформации, связанного с изменением температуры окружающей среды, отличающийся тем, что выходные от датчика угла синусный и косинусный амплитудно-модулированные сигналы (АМС) поступают на первый и второй выпрямители, где их выпрямляют, а с них поступают на первый и второй интеграторы, где выпрямленные сигналы преобразуют в огибающие положительных частей несущих составляющих синусного и косинусного АМС, которые поступают на первый и второй аналого-цифровые преобразователи соответственно, где огибающие положительных частей несущих составляющих синусного и косинусного АМС преобразуют в цифровые коды, которые поступают на блоки определения кодов огибающих несущих составляющих синусного и косинусного АМС соответственно, на эти блоки также поступают дискретные сигналы от первого и второго датчиков магнитного поля соответственно, которые получают сигнал от магнита, который вращают синхронно с ротором СКВТ, а датчики магнитного поля располагают таким образом относительно полюсов магнита и положения ротора СКВТ, чтобы полупериоды сигналов от первого и второго датчиков магнитного поля совпадали по фазе с полупериодами огибающих несущих составляющих синусного и косинусного АМС соответственно и чтобы фронты сигналов от датчиков магнитного поля совпадали с точками перехода, где огибающие меняют свой знак на противоположный, в блоках определения кодов огибающих несущих составляющих синусного и косинусного АМС из кодов амплитуд огибающих положительных частей несущих составляющих синусного и косинусного АМС определяют коды амплитуд огибающих несущих составляющих синусного и косинусного АМС соответственно, а по уровню дискретных сигналов от датчиков магнитного поля определяют знак этих кодов, что позволяет определить амплитуды огибающих несущих составляющих синусного и косинусного АМС на всем периоде их прохождения, из блоков определения кодов огибающих несущих составляющих синусного и косинусного АМС коды, соответствующие амплитудам огибающих несущих составляющих синусного и косинусного АМС, поступают на блок вычисления кода угла поворота ротора, где по ним вычисляют код, соответствующий углу поворота ротора датчика угла по формуле:
θ=arctg(Uc/Uк),
где θ - угол поворота датчика угла,
Uc - амплитуда огибающей синусного амплитудно-модулированного сигнала в момент измерения,
Uк - амплитуда огибающей косинусного амплитудно-модулированного сигнала в момент измерения.
| СПОСОБ ЦИФРОВОГО ПРЕОБРАЗОВАНИЯ УГЛА | 2012 |
|
RU2488958C1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2003 |
|
RU2259631C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

