ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится в целом к сетям беспроводной связи и более конкретно к способу и устройству для определения местоположения терминала в зоне покрытия сети беспроводной связи.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Сети передачи данных часто содержат элементы, подключаемые к сетям по линиям радиосвязи. Как правило, внутри локальной зоны, в которой могут формировать беспроводные соединения мобильные устройства, может быть развернуто некоторое количество стационарных узлов беспроводной сети, таких как точки доступа (АР), причем указанные соединения обычно осуществляются по отраслевым стандартам, таким как стандарт IEEE 802.11, например стандарт IEEE 802.11 а. Предпочтительно точки беспроводного доступа располагают таким образом, чтобы обеспечивалась работа в зоне покрытия, и они подсоединяются к сети передачи данных по линиям проводной или беспроводной связи.
Существует много приложений, в которых имеется необходимость в знании местоположения мобильного терминала, и поэтому были предложены и реализованы различные способы определения местоположения терминала на основе измерений распространения радиосигналов. Известные системы можно классифицировать в зависимости от того, требуют они или нет знания местных условий распространения радиосигналов.
Системы определения местоположения, не требующие знания местных условий распространения радиосигналов, предусматривают, например, определение местоположения по относительному времени получения радиосигналов, передаваемых или принимаемых от стационарных узлов в сети, таких как точки доступа или базовые станции. Радиосигналы могут передаваться в канале восходящей или нисходящей связи, то есть времена получения могут быть измерены на терминале для сигналов, переданных от нескольких стационарных узлов, или на нескольких стационарных узлах для сигналов, переданных терминалом. В других вариантах местоположение определяется по силе сигналов, принимаемых на стационарных узлах от терминала, или на терминале от стационарных узлов. Такие системы определения местоположения по времени получения сигнала и/или по его силе могут указываться как многосторонние системы.
Также известно, что местоположение можно определять по углу прихода радиосигналов, то есть для определения местоположения используется триангуляция.
Системы и способы определения местоположения, которые не требуют знания условий распространения радиосигналов, обычно исходят из определенных допущений о распространении радиосигналов, например, что волны распространяются по линии прямой видимости и не ослабляются препятствиями. Хотя во многих случаях это могут быть вполне разумные допущения, однако при работе в типичных условиях помещений офиса или предприятия могут серьезно сказываться препятствия, распространение сигнала не по линии прямой видимости и многолучевое распространение сигнала, так что точность определения местоположения в таких системах может серьезно ухудшаться.
В то время как для целей определения местоположения вне помещений могут использоваться спутниковые системы навигации, такие как GPS, однако такие системы недостаточно эффективны при использовании внутри помещений, в связи с плохим приемом сигналов от спутников.
Для обеспечения определения местоположения в условиях с непредсказуемыми характеристиками распространения радиосигналов, обычно в помещениях, используется система, в которой осуществляются измерения условий распространения радиосигналов, в частности силы сигналов, принимаемых терминалом от различных точек доступа. При этом местоположение определяется путем сравнения измеренной силы принятого сигнала с базой данных, содержащей силы сигналов, принимаемых от различных точек доступа, которые ранее были измерены в различных точках зоны покрытия сети. Измерения силы принятого сигнала представляют собой "ВЧ-отпечаток" точки в сети (аналогичный отпечатку пальца), то есть характеристический показатель условий распространения радиосигналов для данной точки. Однако при использовании такого способа определения местоположения могут возникать неоднозначности, связанные с тем, что несколько точек могут иметь одинаковые ВЧ-отпечатки. Кроме того, точность определения местоположения в такой системе может быть невысокой.
Целью настоящего изобретения является создание способа и устройства, в которых устраняются вышеуказанные недостатки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В изобретении предлагается способ определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, причем способ включает:
измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов; и
определение местоположения терминала на основе по меньшей мере сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей;
причем каждый из множества записанных наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей.
Достоинством определения местоположения по комплексной частотной характеристике является то, что поскольку эта характеристика представляет собой вектор, содержащий множество компонент, то измерения содержать больше информации, чем, например, простое измерение принятой мощности. Поэтому измерение имеет меньше неоднозначностей, связанных с тем, что в разных точках могут быть получены одинаковые величины.
Достоинство определения местоположения на основе сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей, каждый из которых относится к одной из множества различных точек в зоне покрытия сети, заключается в том, что этот способ принципиально обеспечивает более высокую точность по сравнению со способами, в которых делаются допущения в отношении характера распространения радиосигналов. Это особенно важно в тех случаях, когда условия распространения радиосигналов характеризуются высокой степенью многолучевости или распространением не по пути прямой видимости, то есть принимаемые допущения, скорее всего, будут неточными. Записанные наборы показателей могут быть определены в процессе предварительных измерений, например, в точках, распределенных по зоне покрытия сети беспроводной связи, причем они могут быть распределены по двум или трем измерениям.
Предпочтительно первый набор показателей и множество записанных наборов показателей представляют собой автокорреляционные функции. Достоинство определения местоположения по автокорреляционной функции комплексной частотной характеристики заключается в том, что автокорреляция меньше изменяется при перемещении из одной точки зоны покрытия в другую по сравнению с изменением самой комплексной частотной функции. Поэтому это - надежный показатель, который устойчив к ошибкам местоположения точек, используемых для получения записанных наборов показателей, и к небольшим изменениям условий распространения радиосигналов. Кроме того, устойчивость и указанные сравнительно небольшие изменения хорошо подходят для осуществления процесса сравнения измеренной величины и записанных величин, без необходимости слишком малых расстояний между точками, в которых определяются записываемые наборы показателей.
В предпочтительных вариантах первый набор показателей и множество записанных наборов показателей представляют собой функции частотной когерентности. Функция частотной когерентности также характеризуется медленным изменением при перемещении по зоне и устойчивостью.
В предпочтительных вариантах первый набор показателей и множество записанных наборов показателей представляют собой нормализованные функции частотной когерентности. Достоинством использования нормализованной функции частотной когерентности является то, что набор показателей делается в этом случае независимым от уровня принимаемого сигнала и, соответственно, независимым от мощности передатчика или от неизвестных коэффициентов усиления антенн и т.п. Это позволяет повысить устойчивость набора показателей к изменениям выходной мощности оборудования, так что, например, нет необходимости устанавливать на терминале ту же выходную мощность, которая использовалась при получении записанных наборов показателей.
Измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов предпочтительно осуществляется на основе сообщения, передаваемого терминалом или одним из стационарных узлов, причем сообщение принимается в этом случае одним из стационарных узлов или терминалом, соответственно. Таким образом, измерение может выполняться по сообщению, передаваемому от терминала в стационарный узел, либо в обратном направлении. Поскольку распространение радиосигналов в радиоканале в общем случае не зависит от направления передачи, то одна и та же комплексная характеристика канала будет получена при передаче в любом направлении, при условии, что будет использоваться одна и та же несущая частота.
В предпочтительных вариантах сообщение содержит символ системы модуляции с ортогональным частотным разделением каналов (OFDM). Системы беспроводной связи, использующие модуляцию с ортогональным частотным разделением каналов, особенно подходят для получения комплексной характеристики канала и функции частотной когерентности, поскольку принятые сообщения в любом случае преобразуются в стандартном OFDM-приемнике в частотную область, и получение комплексной характеристики канала принципиально происходит в стандартном процессе приема сообщений с использованием пилот-сигналов в формате OFDM-сообщений.
В предпочтительных вариантах оценивается степень отклонения первого набора показателей от каждого из записанных наборов показателей, и местоположение терминала определяется по положению точки, относящейся к записанному набору показателей, для которого эта степень отклонения будет минимальной. То есть первый набор показателей используется в качестве "отпечатка", который сличается с множеством записанных "отпечатков", полученных в разных точках в процессе предварительных замеров в зоне покрытия сети. Местоположение точки, отпечаток которой лучше других соответствует измеренному отпечатку, принимается в качестве наиболее вероятного местоположения терминала.
В предпочтительных вариантах отпечаток будет включать группу наборов показателей, относящихся к характеристике канала между терминалом и двумя или более стационарными узлами, и, аналогичным образом, записанные наборы показателей будут относиться к характеристикам канала для случая нескольких стационарных узлов. Затем сравнение группы измеренных наборов показателей и группы записанных наборов показателей может быть выполнено на основе степени отклонения, такой как среднеквадратичное отклонение между измеренной и записанной группами. Достоинство использования группы наборов показателей, относящихся к двум или более стационарным узлам, заключается в том, что местоположение может быть определено с большей точностью по сравнению со случаем использования только одного набора показателей.
В настоящем изобретении также предлагается способ получения данных измерений для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, причем способ включает:
измерение комплексной частотной характеристики радиоканала между измерительным узлом и одним из стационарных узлов во множестве различных точек в зоне покрытия сети;
получение данных, представляющих собой набор показателей каждой измеренной комплексной частотной характеристики, связанной с каждой из множества различных точек; и
запись полученных данных для каждой из множества различных точек вместе с указанием точки в зоне покрытия сети, к которой относится полученный набор показателей.
В изобретении предлагается также устройство обработки данных для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, причем:
устройство обработки данных выполнено с возможностью приема измеренной комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов, и
устройство обработки данных выполнено с возможностью определения местоположения терминала на основе, по меньшей мере, сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей;
каждый из множества записанных наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей.
В изобретении предлагается также машиночитаемый носитель с записанной программой, исполняемой компьютером для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, путем:
приема измерения комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов; и
определения местоположения терминала на основе по меньшей мере сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей;
причем каждый из множества записанных наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей.
Другие признаки и достоинства изобретения станут ясными из нижеприведенного описания предпочтительных вариантов его осуществления, которые являются всего лишь примерами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фигура 1 - блок-схема сети беспроводной связи в соответствии с одним из вариантов осуществления изобретения;
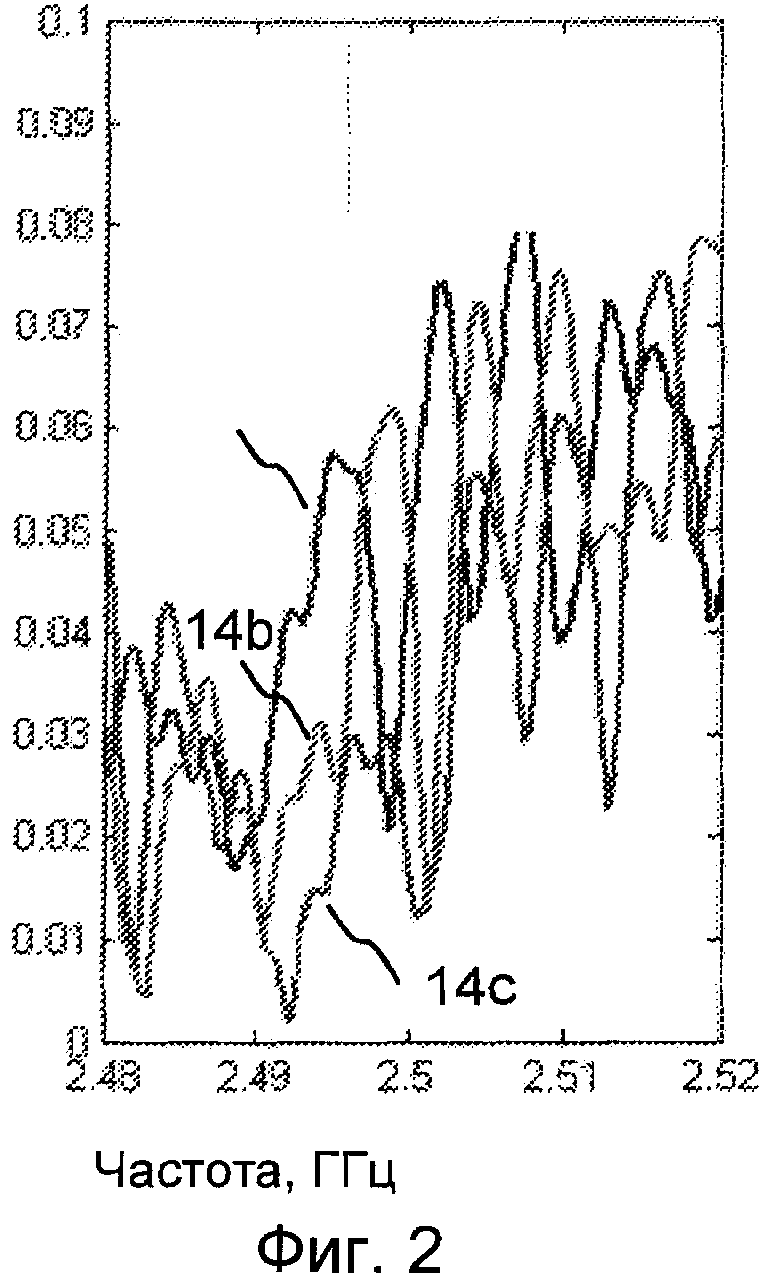
фигура 2 - графики амплитуд трех примеров комплексных характеристик канала;
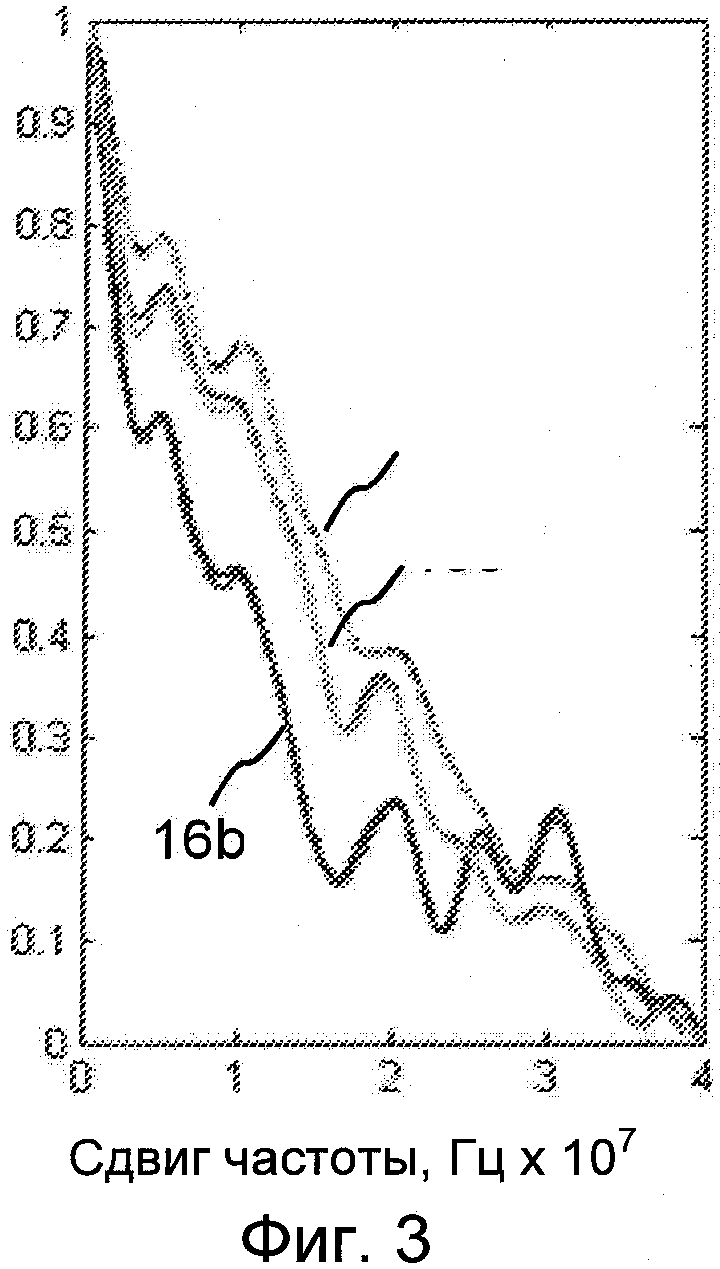
фигура 3 - графики амплитуд трех примеров функций частотной когерентности в соответствии с изобретением;
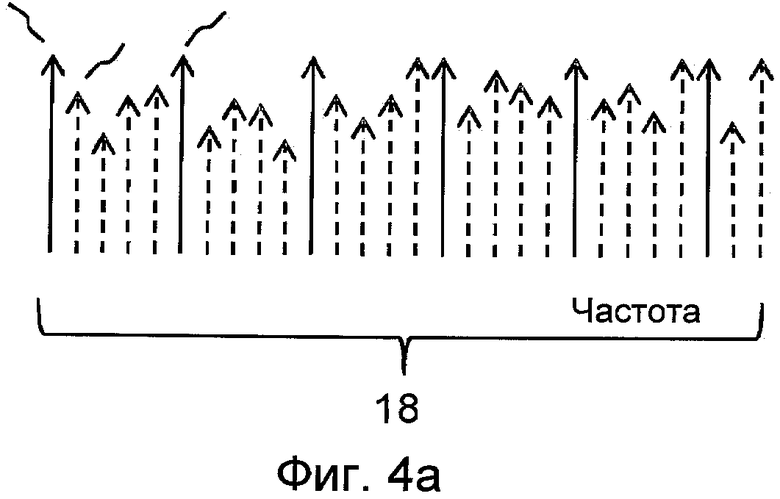
фигура 4а - схема OFDM-символа в том виде, как он передается;
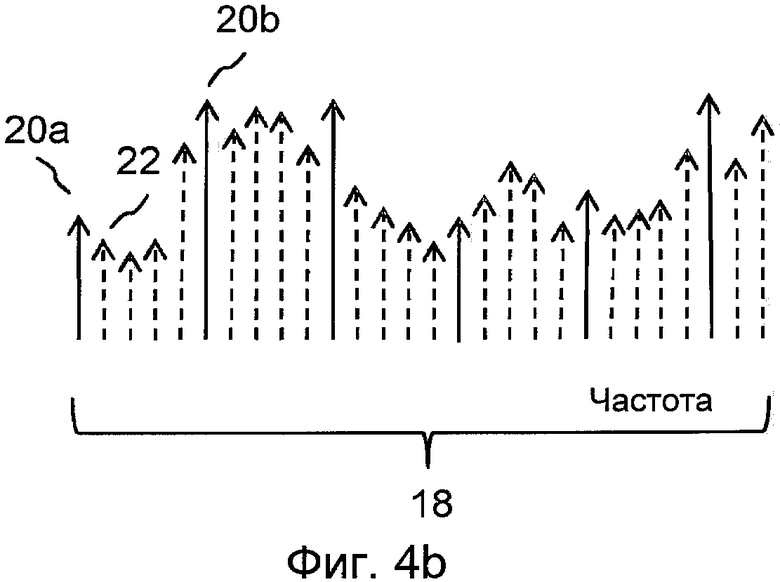
фигура 4b - схема OFDM-символа в том виде, как он принимается;
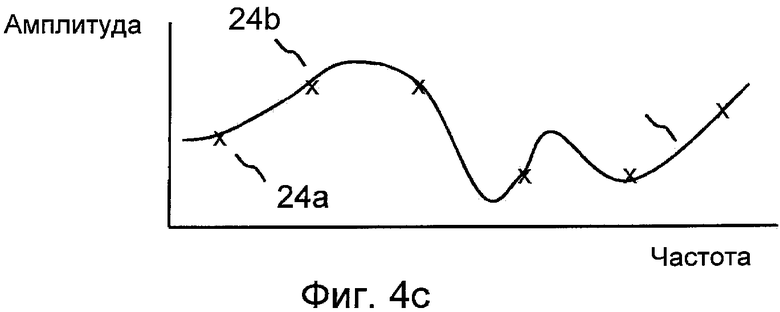
фигура 4с - график амплитуды комплексной частотной характеристики канала, полученной из пилот-сигналов OFDM-символа;
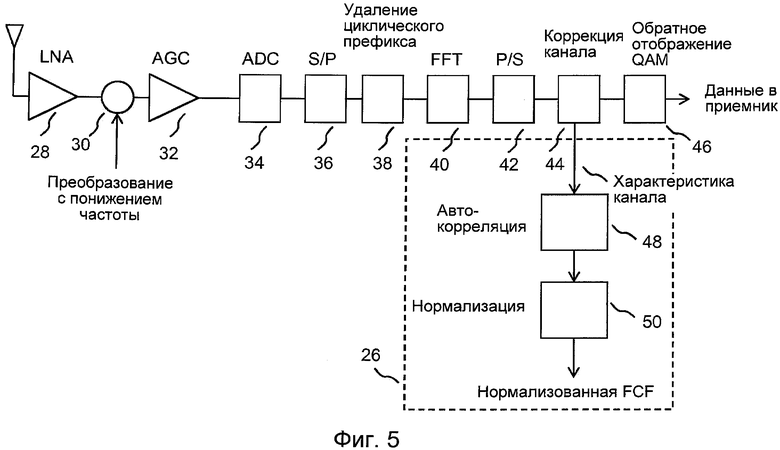
фигура 5 - блок-схема приемного тракта OFDM-приемника, обеспечивающего получение функции частотной когерентности, в одном из вариантов осуществления изобретения;
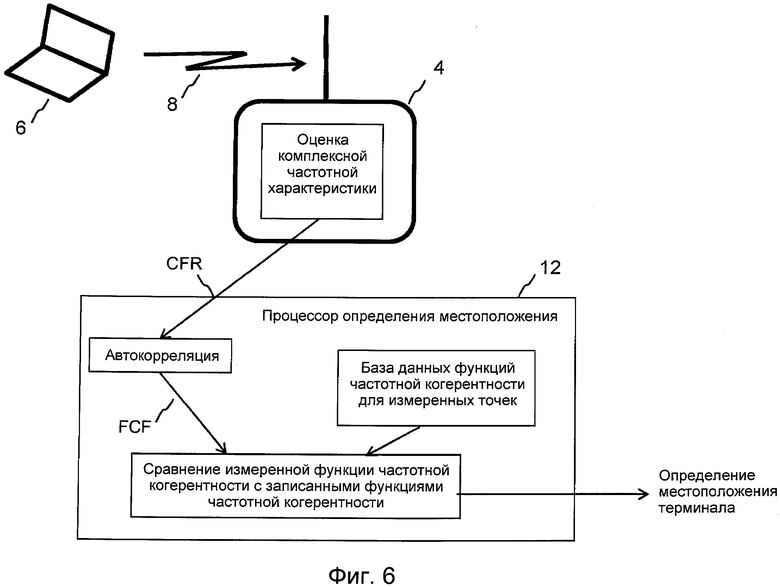
фигура 6 - блок-схема, на которой иллюстрируется система определения местоположения терминала на основе сигналов, полученных от терминала на стационарном узле, в одном из вариантов осуществления изобретения;
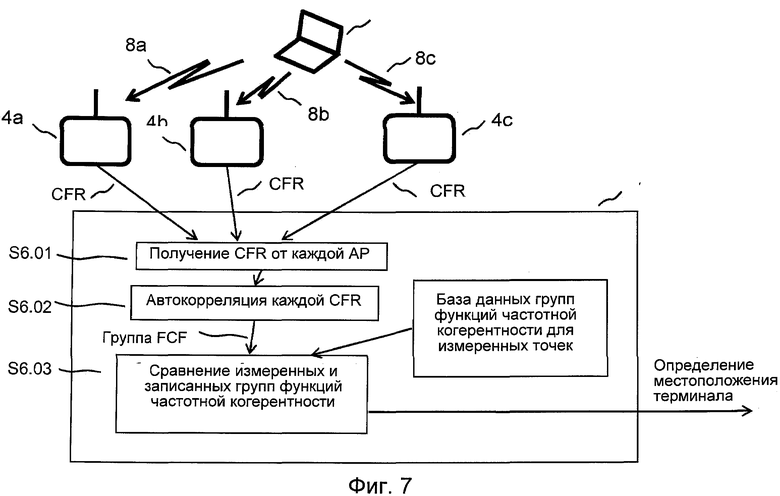
фигура 7 - блок-схема, на которой иллюстрируется система определения местоположения терминала на основе сигналов, полученных от терминала множеством стационарных узлов, в одном из вариантов осуществления изобретения;
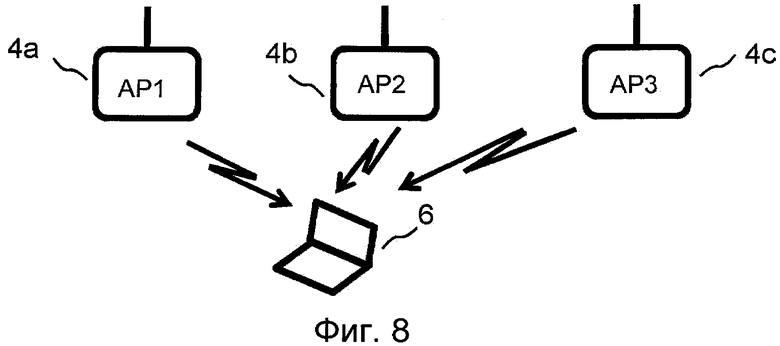
фигура 8 - блок-схема, на которой иллюстрируется система определения местоположения терминала на основе сигналов, полученных терминалом от множества стационарных узлов, в одном из вариантов осуществления изобретения;
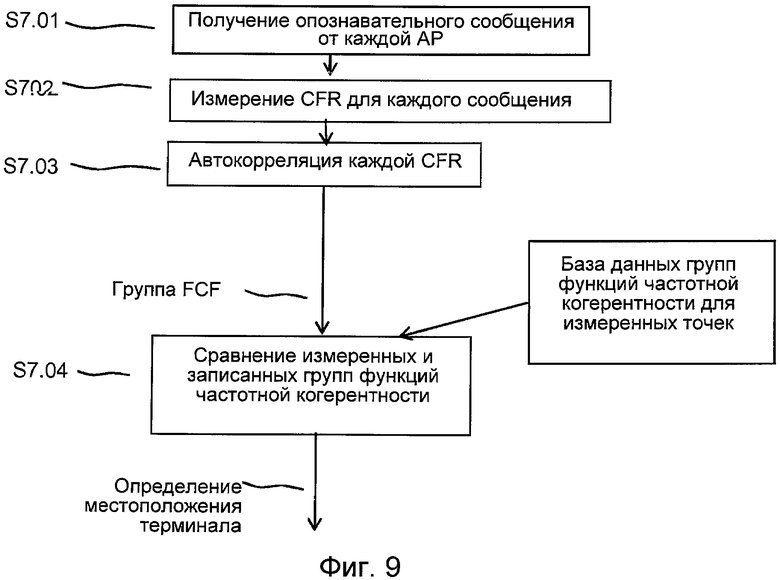
фигура 9 - блок-схема, на которой представлен способ определения местонахождения терминала на основе сигналов, полученных терминалом от множества стационарных узлов, в одном из вариантов осуществления изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В целом настоящее изобретение относится к способам и устройствам для определения местоположения терминала в зоне покрытия сети беспроводной связи.
Ниже будет описан один из вариантов осуществления изобретения на примере сети WiFi в зоне, которая представляет собой помещения предприятия, и сеть WiFi представляет собой множество точек беспроводного доступа, которые могут также указываться как точки подключения или базовые станции, с которыми может соединяться одно или нескольких пользовательских устройств. Точки доступа обычно содержат приемопередатчики, обеспечивающие беспроводное соединение, и подключаются по проводам к остальной части сети передачи данных, которая может быть корпоративной сетью, включающей центр данных, находящийся в другом месте, или же может включать соединение с сетью Интернет. Через точки подключения к сети могут подключаться различные типы устройств, снабженных приемопередатчиком беспроводной связи, такие как персональные компьютеры (ПК), и мобильные устройства, такие как карманные персональные компьютеры (КПК), которые могут перемещаться в пределах зоны покрытия сети беспроводной связи, а также между точками доступа внутри помещений предприятия.
Настоящее изобретение может быть применено в сетях передачи данных, используемых для передачи любых типов данных, включая, например, аудиоинформацию, в частности, голосовые сообщения в цифровой форме, изображения и потоки видеоданных. Сигналы систем беспроводной связи могут передаваться в соответствии с промышленными стандартами, такими как IEEE 802.11 WiFi, однако также могут использоваться стандарты сотовой радиосвязи, такие как LTE или WiMax, или же другие промышленные стандарты, такие как сверхширокополосная радиосвязь или специализированный стандарт.
На фигуре 1 представлен один из вариантов осуществления изобретения. В зоне покрытия 2 сети беспроводной связи показаны три стационарных узла, которые могут быть точками 4а, 4b и 4с доступа. Каждая точка доступ соединяется (обычно по проводной линии) с сетью 11, которая может быть частной сетью передачи данных или же может быть сетью общего пользования, типа Интернет. К сети 11 также подключено устройство 12 обработки данных, предназначенное для определения местоположения.
Внутри зоны 2 покрытия сети беспроводной связи расположен терминал 6, который соединен с точками 4а, 4b и 4с доступа.
Рассматриваемый вариант осуществления изобретения относится к способу определения местоположения терминала 6 внутри сети беспроводной связи с помощью технологии "ВЧ-отпечатков". "ВЧ-отпечаток" - это характеристический показатель условий распространения радиосигналов. В одном из предпочтительных вариантов осуществления изобретения в качестве "ВЧ-отпечатка" используется функция частотной когерентности комплексной частотной характеристики или характеристик радиоканала между терминалом и одной или несколькими точками доступа. Местоположение терминала определяется путем измерения ВЧ-отпечатка и сравнения его с записанным множеством отпечатков, относящихся к известным точкам измерений.
Обычно записанное множество отпечатков получают предварительно в процессе измерений в точках, распределенных по зоне покрытия сети. Как это иллюстрируется на фигуре 1, предварительно получают ВЧ-отпечатки в каждой точке сетки зоны 2 покрытия, то есть в точках 10а, 10b и т.д. пересечения линий сетки. Обычно точки сетки разнесены на расстояние примерно 2 м для системы, работающей на частоте 2,4 ГГц или 5 ГГц. Приведенная цифра является всего лишь примером; могут использоваться меньшие или большие расстояния между точками сетки. Измерения необязательно выполняются по всей зоне покрытия, а лишь в некоторых ее частях, представляющих интерес; кроме того, сетка необязательно должна иметь правильную форму.
Двухсторонние стрелки 8а, 8b и 8с обозначают радиоканалы между терминалом и точками доступа. Вообще говоря, линии беспроводной связи являются двухсторонними, так что комплексная частотная характеристика радиоканалов, указанных ссылочными номерами 8а, 8b и 8с, могут измеряться на сигналах, передаваемых в обоих направлениях. Однако на практике обычно терминал используют в качестве передатчика, а точки доступа - в качестве приемников, поскольку в этом случае, как это станет понятным из нижеизложенного, терминал может использоваться без изменений, а точки доступа могут быть модифицированы для получения набора показателей или группы наборов показателей (то есть ВЧ-отпечатков), используемых для определения местоположения. В общем случае, терминалы могут быть выбраны из широкого спектра устройств, в том числе и устаревших, и предпочтительно, чтобы их местоположение можно было определять без необходимости их модификации. Хотя изобретение будет описано в основном на вариантах его осуществления, в которых терминал является передатчиком, а стационарный узел или стационарные узлы используются в качестве приемников для целей определения местоположения, однако можно выполнять определение местоположения также и при передаче сигналов в противоположном направлении.
Как уже указывалось, в качестве характеристического показателя условий распространения радиосигналов в одном из вариантов осуществления изобретения используется функция частотной когерентности, полученная из комплексной частотной характеристики канала. На фигуре 2 показаны три комплексные частотные характеристики (для наглядности показаны только амплитуды) 14а, 14b, 14с, относящиеся к трем близко расположенным точкам (на расстоянии примерно 10 см). На фигуре 3 показаны эквивалентные функции 16а, 16b, 16с частотной когерентности (снова, для наглядности показаны только амплитуды), относящиеся к этим же трем точкам. Сравнивая приведенные кривые, можно видеть, что комплексная частотная характеристика существенно изменяется (для заданной частоты) при сравнительно небольшом перемещении, в то время как функция частотной когерентности при таком перемещении изменяется меньше. В большинстве случаев было найдено, что функция частотной когерентности лучше подходит для использования в качестве характеристического показателя условий распространения радиосигналов, чем комплексная частотна функция, поскольку она более устойчива и требует меньшего усреднения, или не требует вообще никакого усреднения, для получения воспроизводимых результатов.
Функция частотной когерентности (FCF) может быть записана следующим образом:

где N - число элементов выборки характеристики канала, m - сдвиг частоты в элементах выборки, k - частота в элементах выборки, Н - комплексная частотная характеристика канала, и "звездочка" у Н - комплексное транспонирование расчетной комплексной частотной характеристики канала. Таким образом, функция FCF представляет собой комплексный вектор, содержащий m членов. Можно видеть, что FCF представляет собой форму автокорреляционной функции расчетной комплексной частотной характеристики канала. На практике настоящая сложная частотная характеристика Н канала неизвестна, а известна только расчетная характеристика. Обычной практикой является указание расчетной характеристики канала просто как "характеристика канала", поскольку понятно, что измеренная величина обязательно является расчетной. Аналогично, истинная функция R частотной когерентности, строго говоря, неизвестна, а известна лишь расчетная функция частотной когерентности. Символ "крышечка" над буквами R и Н указывает расчетные величины.
На фигурах 4а, 4b и 4с иллюстрируется использование пилот-сигналов в системе модуляции с ортогональным частотным разделением каналов (OFDM)для получения комплексной частотной функции канала.
OFDM является основой для все большего числа современных стандартов беспроводной связи, включая 802.11 а, 802.11g, WiMax и LTE. Системы, использующие OFDM, особенно подходят для использования в вариантах осуществления настоящего изобретения, поскольку в них расчетная комплексная частотная характеристика канала формируется в качестве неотъемлемой части процесса демодуляции, что может использоваться для формирования FCF с минимальными модификациями.
На фигурах 4а, 4b и 4с иллюстрируется использование пилот-сигналов в системе модуляции с ортогональным частотным разделением каналов для получения комплексной частотной функции канала. На фигуре 4а показан OFDM-символ 18 в том виде, как он передается, в частотной области. Можно видеть, что имеется ряд поднесущих, содержащих пилот-сигналы 20а, 20b, передаваемых с заданной амплитудой и фазой, и частоты 22 данных, которые модулируются для передачи данных.
На фигуре 4b показан OFDM-символ 18 в том виде, как он принят, после передачи по каналу. Можно видеть, что амплитуды изменились в соответствии с характеристикой канала (фаза не показана, но она также меняется).
На фигуре 4с показана амплитуда комплексной частотной характеристики 14 канала, полученной по величинам 24а, 24b пилот-сигналов.
Некоторые форматы передачи могут содержать OFDM-символы, в которых все поднесущие передаются с известными амплитудами и фазами, так что характеристика канала может быть определена по принятому символу. Такие известные символы, как правило, расположены в преамбуле кадра. Другие символы, в частности символы, содержащие полезные данные (контент), обычно имеют подмножество поднесущих, зарезервированных для пилот-сигналов (на схеме фигуры 4а действительное число пилот-сигналов не отражено), и основная часть поднесущих используется для передачи данных. Эти пилот-сигналы обычно используются для оценки изменения канала во времени. Автокорреляционная функция оценки канала, то есть автокорреляционная функция расчетной комплексной частотной характеристики канала может использоваться в качестве основы для получения функции FCF. Таким образом, можно понять, что нет необходимости в получении положения каждой поднесущей или точки в оценке канала непосредственно из пилот-сигнала, а вместо этого можно использовать интерполяцию между пилот-сигналами.
Нижеприведенный вывод формулы относится к случаю, когда каждая поднесущая представляет собой пилот-сигнал, состояние которого при передаче известно, однако из вышеизложенного очевидно, что хотя это полезный пример, однако он не обязательно будет иметь место.
Если Sk - комплексная амплитуда сигнала, принятого на А-й частоте в точке (х, у),
Dk - известный пилот-сигнал на k-й частоте, и
Zk - член, представляющий шумовую составляющую на k-й частоте, то:

И оценку канала можно осуществить следующим образом:

Можно видеть, что оценка Н может использоваться для получения функции частотной когерентности с помощью уравнения (1).
Необходимо также отметить, что функция частотной когерентности может быть получена с помощью преобразования Фурье профиля задержек принятого сигнала.
На фигуре 5 приведена блок-схема приемного тракта OFDM-приемника, обеспечивающего получение функции частотной когерентности в одном из вариантов осуществления изобретения. Как показано на фигуре 5, в состав известного приемника OFDM входят следующие части: усилитель 28 с низким уровнем шумов, блок 30 преобразования с понижением частоты, схема 32 автоматического регулирования усиления, аналого-цифровой преобразователь 34, блок 36 преобразования кода из последовательного в параллельный, блок 38 удаления циклического префикса, блок 40 быстрого преобразования Фурье, блок 42 преобразования кода из параллельного в последовательный, блок 44 коррекции канала и блок 46 обратного отображения квадратурной амплитудной модуляции (QAM).
Блок 44 коррекции канала включает оценку, то есть измерение комплексной характеристики канала между передатчиком и приемником OFDM-сигналов. Комплексная частотная характеристика канала из блока 44 коррекции канала передается, в соответствии с одним из вариантов осуществления изобретения, в схему 48 автокорреляции, обеспечивающую получение функции частотной когерентности. Затем может осуществляться нормализация по мощности с использованием функции 50 нормализации по мощности для получения нормализованной функции частотной когерентности.
На фигуре 6 показана возможная реализация системы определения местоположения в одном из вариантов осуществления изобретения, в котором терминал 6 используется в качестве передатчика, а точка доступа используется в качестве приемника 4. Комплексная частотная характеристика радиоканала 8 между терминалом 6 и точкой 4 доступа оценивается, то есть измеряется, с использованием функции оценки комплексной частотной характеристики канала в точке 4 доступа.
Затем полученная комплексная частотная характеристика передается по соответствующей линии связи в устройство 12 обработки данных для определения местоположения, которое может быть реализовано, например, на персональном компьютере или как часть контроллера сети радиосвязи.
После получения комплексной частотной характеристики устройство определения местоположения вычисляет автокорреляционную функцию для получения расчетной функции частотной когерентности. Затем расчетная функция частотной когерентности сравнивается с информацией, записанной в базе данных функций частотной когерентности, которые были получены предварительно в рамках ВЧ-измерений в различных точках зоны покрытия точки доступа.
Сравнение может осуществляться, например, на основе среднеквадратичных отклонений между соответствующими компонентами сдвига частоты функций частотной когерентности. Записанная функция частотной когерентности, имеющая минимальное среднеквадратичное отклонение, выбирается в качестве наилучшего приближения расчетной функции частотной когерентности, и местоположение, в котором она была измерена, принимается в качестве оценки местоположения терминала.
Следует отметить, что выбор комплексной частотной характеристики в качестве данных, которые должны передаваться в устройство определения местоположения, приведен лишь в качестве примера, поскольку функция частотной когерентности может вычисляться в точке доступа, и процессор также может находиться в точке доступа.
На фигуре 7 показана возможная реализация системы оценки местоположения в одном из вариантов осуществления изобретения, в котором терминал 6 используется в качестве передатчика, и три точки 4а, 4b и 4с доступа используются в качестве приемников. В точках 4а, 4b и 4с доступа вычисляются комплексные частотные характеристики каналов 8a, 8b и 8с между терминалом 6 и точками 4а, 4b и 4с доступа, соответственно. Затем полученные комплексные частотные характеристики передается по соответствующей линии связи в устройство 12 определения местоположения, которое может быть реализовано, например, на персональном компьютере или как часть контроллера сети радиосвязи. Как уже отмечалось, разделение функций между физическими устройствами указывается лишь в целях иллюстрации изобретения, и в принципе любая функция после приема сигнала может осуществляться в точке доступа, или в устройстве определения местоположения, или в каком-либо ином устройстве обработки или узле сети.
После получения комплексных частотных характеристик (стадия S6.01) устройство определения местоположения вычисляет автокорреляционную функцию для каждой комплексной частотной характеристики (стадия S6.02) для получения расчетной функции частотной когерентности, в результате чего формируется группа функций частотной когерентности, содержащая наборы показателей каждой частотной характеристики канала. Эта группа может указываться как "ВЧ-отпечаток".
Затем ВЧ-отпечаток, то есть группа расчетных функций частотной когерентности, сравнивается (стадия S6.03) с информацией, записанной в базе данных ВЧ-отпечатков, которые были получены предварительно в рамках ВЧ-измерений в различных точках зоны покрытия точки доступа.
Сравнение может осуществляться, например, на основе среднеквадратичных отклонений между соответствующими компонентами сдвига частоты функций частотной когерентности (то есть функций частотной когерентности, относящихся к измерениям для одной и той же точки доступа). Записанная функция частотной когерентности, которая имеет минимальное среднеквадратичное отклонение, выбирается в качестве наилучшего приближения расчетной функции частотной когерентности, и местоположение, в котором она была измерена, принимается в качестве оценки местоположения терминала. Она может быть указана в качестве точки местоположения терминала.
Местоположение терминала может быть также определено путем вычисления величины, находящейся между точками измерений ВЧ-отпечатков. В этом случае выбираются два или более местоположений с наименьшими отклонениями или наименьшими среднеквадратическими отклонениями от измеренного ВЧ-отпечатка, и местоположение терминала определяется путем интерполяции между этими выбранными точками. При этом может быть улучшена точность определения местоположения терминала.
На фигуре 8 представлена блок-схема одного из вариантов осуществления изобретения, в котором три точки 4а, 4b, 4с доступа используются в качестве передатчиков, а терминал 6 используется в качестве приемника. В этом случае может быть целесообразным прием в приемнике опознавательных сообщений или кадров, передаваемых точками доступа, и использование их в качестве основы для вычисления функций частотной когерентности. Однако следует иметь в виду, что могут также использоваться и другие передаваемые сигналы, такие как традиционные OFDM-сигналы, как и в варианте использования терминала в качестве передатчика. Опознавательные кадры используются так же, как и любые другие кадры, поскольку они содержат преамбулы и OFDM-символы. Единственная существенная разница заключается в том, что они не несут полезной информации, однако содержат информацию о точке доступа, такую как ее идентификационные данные и характеристики.
На фигуре 9 показаны стадии определения местоположения в варианте, блок-схема которого представлена на фигуре 8. На стадии S7.01 от каждой из точек 4а, 4b, 4с доступа принимаются опознавательные сообщения. На стадии S7.02 для каждого опознавательного сообщения измеряется комплексная частотная характеристика. На стадии S7.03 по каждой комплексной частотной характеристике вычисляется автокорреляционная функция для получения функций частотной когерентности, то есть ВЧ-отпечатков. Затем полученные ВЧ-отпечатки сравниваются с записанным множеством ВЧ-отпечатков. Как и в предыдущем случае, наиболее близкий ВЧ-отпечаток может использоваться в качестве наиболее вероятного местоположения терминала или же может использоваться интерполяция между двумя или более наиболее близкими ВЧ-отпечатками для получения интерполированного местоположения терминала.
Рассмотренные варианты должны рассматриваться лишь как иллюстративные примеры осуществления изобретения. Необходимо понимать, что любой признак, описанный в каком-либо из вариантов осуществления изобретения, может использоваться отдельно или вместе с другими описанными признаками, а также может использоваться вместе с одним или несколькими признаками любого другого варианта, или с их любыми сочетаниями. Кроме того, эквиваленты и модификации, не раскрытые в настоящем описании, также могут использоваться без выхода за пределы объема изобретения, который определяется прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ ОБМЕНА ДАННЫМИ ПРИ СВЯЗИ МЕЖДУ РАВНОПРАВНЫМИ УЗЛАМИ | 2008 |
|
RU2467493C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2011 |
|
RU2454797C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПОИСКА СОТЫ В ОРТОГОНАЛЬНОЙ СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2007 |
|
RU2420873C2 |
| СПОСОБЫ И УСТРОЙСТВО ДЛЯ РАСПРЕДЕЛЕНИЯ БЕСПРОВОДНЫХ РЕСУРСОВ | 2007 |
|
RU2407201C2 |
| ДИНАМИЧЕСКОЕ СНИЖЕНИЕ ВЫХОДНОЙ МОЩНОСТИ УСИЛИТЕЛЯ МОЩНОСТИ С ПОМОЩЬЮ ИНФОРМАЦИИ О ЗАПАСЕ МОЩНОСТИ | 2007 |
|
RU2421937C2 |
| ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ С ИСПОЛЬЗОВАНИЕМ УСОВЕРШЕНСТВОВАННОГО КОНТРОЛЬНОГО СИГНАЛА | 2008 |
|
RU2470493C2 |
| СПОСОБ СИГНАЛИЗАЦИИ КОНКРЕТНЫХ ТИПОВ ЭЛЕМЕНТОВ РЕСУРСОВ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2532531C2 |
| СПОСОБ ПЕРЕДАЧИ СИГНАЛИЗАЦИИ О НАЗНАЧЕНИИ РЕСУРСОВ ЧАСТОТНОЙ ОБЛАСТИ | 2019 |
|
RU2743667C1 |
| ИДЕНТИФИКАЦИЯ ЦЕЛЕВОГО УЗЛА ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ | 2008 |
|
RU2467509C2 |
| УПРАВЛЕНИЕ МЕЖСОТОВОЙ МОЩНОСТЬЮ ПРИ НАЛИЧИИ МНОГОКРАТНОГО ИСПОЛЬЗОВАНИЯ ДРОБНЫХ ЧАСТОТ | 2007 |
|
RU2425468C2 |
Изобретение относится к технике сотовой связи и может использоваться для определения местоположения терминала в зоне покрытия сети беспроводной связи. Технический результат состоит в повышении точности определения местоположения. Для этого система содержит по меньшей мере один стационарный узел, включающий измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов и определение местоположения терминала на основе, по меньшей мере, сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей, каждый из которых относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей. 4 н. и 14 з.п. ф-лы, 9 ил.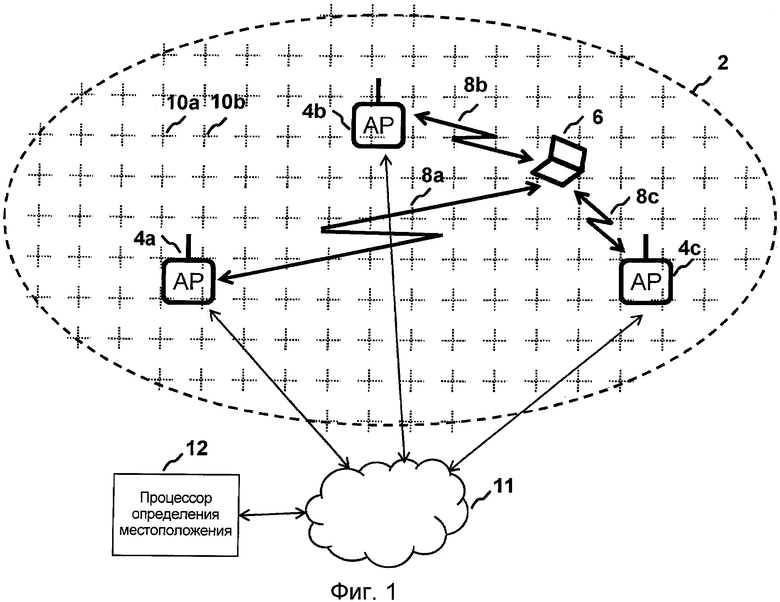
1. Способ определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, причем способ включает:
измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов; и
определение местоположения терминала на основе, по меньшей мере, сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей;
причем каждый из множества записанных наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей, причем первый набор показателей и множество записанных наборов показателей представляют собой автокорреляционные функции.
2. Способ по п.1, в котором первый набор показателей и множество записанных наборов показателей представляют собой функции частотной когерентности.
3. Способ по п.2, в котором первый набор показателей и множество записанных наборов показателей представляют собой нормализованные функции частотной когерентности.
4. Способ по п.1, в котором измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов осуществляется на основе сообщения, передаваемого терминалом или одним из стационарных узлов, причем в этом случае сообщение принимается одним из стационарных узлов или терминалом соответственно.
5. Способ по п.4, в котором сообщение содержит символ системы модуляции с ортогональным частотным разделением каналов, и измерение включает:
прием пилот-сигналов символа системы модуляции с ортогональным частотным разделением каналов;
расчет комплексной частотной характеристики радиоканала на основе принятых пилот-сигналов; и
оценку первого набора показателей на основе автокорреляционной функции расчетной комплексной частотной характеристики.
6. Способ по п.1, в котором определение местоположения включает:
оценку степени различия между первым набором показателей и каждым из записанных наборов показателей;
определение местоположения терминала на основе точки, относящейся к записанному набору показателей, для которого оцениваемая степень различия будет минимальной.
7. Способ по п.1, в котором сеть беспроводной связи содержит дополнительно множество стационарных узлов, причем способ включает дополнительно:
измерение группы комплексных частотных характеристик, которая содержит комплексные частотные характеристики для радиоканалов между терминалом и каждым из двух или более стационарных узлов;
определение группы первых наборов показателей, каждый из которых соответствует одной из групп измеренных комплексных частотных характеристик;
определение местоположения терминала на основе сравнения каждого первого набора показателей из группы первых наборов показателей и соответствующих наборов показателей из множества записанных групп наборов показателей;
причем каждая записанная группа наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждая группа записанных наборов показателей содержит записанные показатели для комплексных частотных характеристик, измеренных между каждым из двух или более стационарных узлов и точкой в зоне покрытия сети, к которой относится записанная группа наборов показателей.
8. Способ по п.7, в котором определение местоположения включает:
оценку степени различия каждого первого набора показателей из группы первых наборов показателей и соответствующего набора показателей в каждой из множества записанных групп наборов показателей;
вычисление среднеквадратичного отклонения между группой первых наборов показателей и каждой записанной группой наборов показателей, на основе оценок различий;
определение местоположения терминала на основе одной из множества точек, для которой вычисленное среднеквадратичное отклонение минимально.
9. Способ по п.7, в котором определение местоположения включает:
оценку степени различия между каждым первым набором показателей из группы первых наборов показателей и соответствующим набором показателей в каждой из множества записанных групп наборов показателей;
вычисление среднеквадратичного отклонения между группой первых наборов показателей и каждой записанной группой наборов показателей, на основе оценок различий;
выбор двух или более точек из множества точек с наименьшими среднеквадратичными отклонениями по сравнению с другими точками; и
определение местоположения терминала на основе интерполяции между выбранными точками.
10. Способ получения данных измерений для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, причем способ включает:
измерение комплексной частотной характеристики радиоканала между измерительным узлом и одним из стационарных узлов в множестве различных точек в зоне покрытия сети;
получение данных, представляющих набор показателей каждой измеренной комплексной частотной характеристики, связанной с каждой из множества различных точек;
запись полученных данных для каждой из множества различных точек вместе с указанием точки в зоне покрытия сети, к которой относится полученный набор показателей, причем показатели представляют собой автокорреляционные функции.
11. Способ по п.10, в котором показатели представляют собой функции частотной когерентности.
12. Способ по п.11, в котором показатели представляют собой нормализованные функции частотной когерентности.
13. Способ по п.10, в котором измерение комплексной частотной характеристики радиоканала между измерительным узлом и одним из стационарных узлов осуществляется на основе сообщения, передаваемого измерительным узлом или одним из стационарных узлов, причем сообщение принимается в этом случае одним из стационарных узлов или измерительным узлом соответственно.
14. Устройство обработки данных для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел,
причем устройство обработки данных выполнено с возможностью приема измеренной комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов, и
устройство обработки данных выполнено с возможностью определения местоположения терминала на основе, по меньшей мере, сравнения данных, представляющих первый набор показателей измеренной комплексной частотной характеристики, и данных, представляющих множество записанных наборов показателей;
причем каждый из множества записанных наборов показателей относится к одной из множества различных точек в зоне покрытия сети, и каждый записанный набор показателей представляет собой комплексную частотную характеристику, измеренную между одним из стационарных узлов и точкой в зоне покрытия сети, к которой относится этот набор показателей, причем первый набор показателей и множество записанных наборов показателей представляют собой автокорреляционные функции.
15. Устройство обработки данных по п.14, в котором первый набор показателей и множество записанных наборов показателей представляют собой функции когерентности частоты.
16. Устройство обработки данных по п.15, в котором первый набор показателей и множество записанных наборов показателей представляют собой нормализованные функции частотной когерентности.
17. Устройство обработки данных по п.16, в котором измерение комплексной частотной характеристики радиоканала между терминалом и одним из стационарных узлов осуществляется на основе сообщения, передаваемого терминалом или одним из стационарных узлов, причем сообщение принимается в этом случае одним из стационарных узлов или терминалом соответственно.
18. Машиночитаемый носитель с записанной программой, выполняемой компьютером для определения местоположения терминала в зоне покрытия сети беспроводной связи, содержащей по меньшей мере один стационарный узел, согласно способу по любому из пп.1-9.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| МНОГОРЕЖИМНОЕ УСТРОЙСТВО СВЯЗИ С ОПРЕДЕЛЕНИЕМ МЕСТОПОЛОЖЕНИЯ | 2002 |
|
RU2315427C2 |
| УПРАВЛЕНИЕ РАДИОПОМЕХАМИ ДЛЯ МЯГКОЙ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ И ШИРОКОВЕЩАТЕЛЬНОГО ОБСЛУЖИВАНИЯ В СИСТЕМЕ БЕСПРОВОДНОЙ СВЯЗИ СО СКАЧКООБРАЗНОЙ ПЕРЕСТРОЙКОЙ ЧАСТОТЫ | 2004 |
|
RU2328821C2 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

