Изобретение относится к области получения и обработки изображений, получаемых в различных диапазонах длин электромагнитных волн.
Объект изобретения представляет собой устройство, распознающее изображение, получаемое в различных оптических диапазонах длин электромагнитных волн с помощью ряда элементов, формирующих требуемый вид и параметры зондирующего сигнала, и использующего принципы голографической обработки при приеме сигнала.
В системах технического зрения (СТЗ), предназначенных для интеллектуальных робототехнических систем, в особенности для таких, как системы локации автомобилей-роботов будущего, планетоходов, роботов-спасателей, системах картографирования и др., желательно иметь развитое сенсорное обеспечение. Однако формирование сложных зондирующих сигналов в различных диапазонах длин электромагнитных волн, создание многолучевых систем локации и распознавание образов представляет собой сложную техническую задачу.
Среди существующих и перспективных СТЗ наилучшим образом требованиям, предъявляемым к бортовым системам мобильных роботов, отвечают устройства на основе сканирующего лазерного дальномера [1]. Высокая точность определения координат объектов с помощью лазерных дальномеров достигается низкой расходимостью лазерного луча. В таком локаторе лазерный луч через передающую оптическую систему направляется на объект. При этом часть отраженного сигнала с помощью объектива и узкополосного оптического фильтра поступает на фотодетектор и фотоумножитель. Сигнал с фотоумножителя измеряется и либо по числу импульсов, либо по задержке фазы возможно определить расстояние до конкретной точки объекта. Однако для обеспечения пространственного сканирования как по азимуту, так и по углу места необходимо использовать сложные электронные и электронно-механические системы, как для лазерных локационных систем, так и для радиолокационных станций.
Известны разработки антенных решеток, фазовращатели которых используют для изменения фазы проходящего сигнала облако плазмы [2]. На сегодняшний день подобные устройства не достигли технического уровня, когда становится возможным их широкое практическое применение. Все вышеназванные устройства обладают минимальными временами отклика в сравнении с их механическими аналогами. Однако они не могут быть применимы в ряде приборов, таких как СТЗ, системы приема-передачи данных, а также системы разведки, радиоэлектронного или оптического подавления в случаях, когда требуется максимально быстро сканировать окружающую обстановку, модулировать оптический сигнал при передаче больших объемов данных, отслеживать частоты, на которых излучают радиолокационные станции или информационные радиолинии. Обычная для СВЧ схема построения фазированной решетки с использованием в каждом дискретном элементе отдельного фазовращателя в оптической области практически неосуществима, поэтому данную схему нельзя использовать для лазерных систем локации. В лазерных системах используются оптические системы для отклонения коллимированного луча за счет естественного лучепреломления, а также эффектов Керра, Поккельса, ферроэлектрического эффекта при прохождении луча через среду преломления (кальцит, KH2PO4 и др.) [3]. Цифровая система сканирования, представленная в [4, 5], состоит из двух главных частей: кристалла с естественным двойным лучепреломлением (кальцит) и электрооптического кристалла с двойным лучепреломлением (KH2PO4). Соответствующим образом ориентированный кристалл с двойным лучепреломлением разделяет неполяризованный световой луч на два луча. Лучи имеют линейные и взаимно перпендикулярные поляризации. Световой луч в соответствии с направлением поляризации занимает одно из двух возможных направлений. Направление поляризации определяется подачей соответствующего напряжения на прозрачные электроды, нанесенные на кристалл. При этом используется продольный электрооптический эффект Поккельса. Для трехкаскадной системы возможно два варианта: для коллимированного и для сходящегося лучей. Вариант для коллимированного луча проще, но он имеет ограничения по числу разрешимых выходных положений луча при данной апертуре. Более высокое разрешение можно получить при пропускании через соответствующим образом спроектированный прибор сходящегося луча и фокусировании его в выходной фокальной плоскости. Таким образом, получается наилучшее использование апертуры отклоняющей системы и при данном размере кристалла число положений луча увеличивается.
Так как достаточно трудно получить электрическое отклонение светового луча на большие углы был разработан прибор, в котором сочетается лазер и электронно-лучевая трубка [6, 7]. Лазерное излучение в сканирующем лазере выходит из резонатора с управляемой добротностью, имея желательное направление распространения. Резонатор состоит из двух оптически сопряженных зеркал, отражающихся один в другом с помощью линз внутри резонатора. Селективное ухудшение добротности осуществляется модифицированной электронно-лучевой трубкой. Сначала все типы колебаний поляризованы, и пластина с двойным лучепреломлением, помещенная внутри резонатора, создает достаточную эллиптическую поляризацию для подавления колебаний. На одном из диэлектрических зеркал резонатора укреплен кристалл (KH2PO4), причем это зеркало одновременно выполняет функцию мишени для отклоняемого электронного луча. Эллиптическая поляризация может локально подавляться электрическим полем зарядов, которые, действуя благодаря электрооптическому эффекту кристалла, создают эллиптическую поляризацию с противоположным направлением вращения.
Однако данные схемы непригодны или затратны для управления параметрами электрической цепи в системах управления, в задачах радиоэлектронной борьбы и некоторых системах приема-передачи данных так, как требует для этого формирования самого лазерного луча, а также отдельной подсистемы сканирования и управления лазерным лучом. При этом достижимые изменения показателя преломления незначительны.
Задачей предлагаемого изобретения является создание СТЗ с практически безынерционной системой управления лучом, основным элементом которой является электрооптическая схема регулирования параметров сигнала, и новой схемой приемного контура, позволяющего использовать различные способы обработки, в том числе голографические.
В предлагаемом устройстве формирование и модуляция луча происходит за счет регулирования параметров электрической цепи электрооптической схемой, входным сигналом которой является программируемый сигнал заданной частоты от цифрового процессора, а выходным - требуемая задержка фазы для каждого излучателя апертуры антенной решетки или лазерной сканирующей системы. Применение подобной схемы возможно как в системах непрерывного, так и импульсного типа.
Указанный технический результат достигается путем подачи управляющего электрического сигнала на ячейки поверхности из поляризуемых кристаллов («жидких кристаллов»), пропускающих световое излучение определенной длины волны (после светофильтра), которое, преломляясь в оптической среде и отклоняясь на щели, приходит к фотоэлементу с соответствующей задержкой, где далее проходит через формируемые с помощью матрицы жидких кристаллов транспаранты, которые, в свою очередь, получают с использованием встроенной базы данных об окружающей обстановке и объектах, после чего сигнал сравнивается с порогом и делается вывод о местоположении автономного робота и наличии объектов в поле зрения.
В данной схеме содержится источник света, лучистый поток которого проходит через светофильтры на поверхность из ячеек, заполненную веществом, поляризующимся под действием управляющего сигнала от котроллера. Свет дифрагирует на щели, отклоняясь на определенный угол, соответствующий длине волны, проходит через прозрачную среду преломления, попадает на фотоэлемент (фотодиод, фототранзистор, фотосопротивление), являющийся управляющим элементом электрической схемы и позволяющий току управляемой цепи протекать через ветвь, где находится данный управляющий элемент, повышая или снижая требуемые величины силы тока или напряжения и позволяет осуществить схему фазовой задержки для передающей решетки из полупроводниковых лазеров. Приемный контур СТЗ содержит набор чувствительных элементов, синхронизирующее устройство, коррелятор, включающий матрицу формируемых при помощи встроенной базы данных транспарантов из ячеек поляризуемых кристаллов и блок сравнения. В апертуре предлагаемого приемного устройства каждый элемент решетки (ячейка КМОП фотоэлемента, микроболометр и т.д.) находится вблизи излучателя на определенном расстоянии. После формирования зондирующего импульса происходит синхронизация СТЗ с помощью синхронизирующего устройства. Сигнал с линии передачи содержит информацию об индексе элемента излучившего сигнал, и параметрах импульса, времени конца излучения импульса, длительности и скважности, которые используются в корреляторе. В корреляторе формируются транспаранты для приходящих через фотоприемное устройство импульсов. Пропущенные через транспаранты сигналы поступают в блок сравнения, где происходит анализ сигнала. После блока сравнения откалиброванный сигнал поступает в процессор, где вычисляется текущее положение и наличие неучтенных объектов.
Новая совокупность конструктивных элементов, а также наличие связей между параметрами позволяют, в частности, за счет наличия:
- процессора для обработки входящего и выдачи управляющего сигнала - обеспечить формирование требуемого зондирующего луча (или нескольких) и решение задачи определения текущего положения и обнаружения объектов;
- цифровых контроллеров - обеспечить формирование управляющего сигнала на поверхность из поляризуемых кристаллов («жидких кристаллов») при управлении лучом в передающем контуре и создании транспарантов в приемном контуре;
- лампы и отражающей поверхности - сформировать равномерный световой поток по всей поверхности с ячейками из поляризуемых кристаллов;
- светофильтров, расположенных перед поверхностью с ячейками из поляризуемых кристаллов, - пропускать свет с определенной длиной волны;
- поверхности с ячейками из поляризуемых кристаллов, которые при поляризации поворачивают свои молекулы таким образом, что регулируют величину светового потока, - обеспечить пропуск светового потока с заданной мощностью и определенной длиной волны в прозрачную среду преломления в передающем контуре и формирования транспарантов для реализации голографических принципов распознавания;
- щелевой маски, ограничивающей величину светового потока, падающего на фотоэлемент, и вызывающей дифракцию этого потока на щели, и самого фотоэлемента, - регулировать силу тока в ветви электрической цепи;
- фотоприемного устройства матричного типа, обеспечивающего сигнал на входе коррелятора, - пропускать отраженные импульсы через набор транспарантов к блоку сравнения;
- синхронизирующего устройства, формирующего сигнал об индексе элемента в излучающей решетке для блока сравнения и о параметрах зондирующего импульса для переключателя «прием-передача» и линии задержки, - определять время функционирования каждого транспаранта;
- базы данных с исходной информацией об окружающей обстановке, представленной в дискретном виде для удобства классификации и распознавания, - выдавать управляющий сигнал на контроллер формирующий транспаранты.
Управляя цветом и яркостью изображения с помощью графического изображения, можно получить различные изменения параметров на входе управляемой схемы, что представляет большие возможности по формированию зондирующих сигналов. Последовательное формирование транспарантов при помощи линии задержки с учетом информации о параметрах сигнала позволяет обеспечить инвариантность принимаемого изображения к угловому положению носителя СТЗ.
Сущность изобретения поясняется чертежами, где на фиг.1-4 представлено одно из возможных технических решений.
На фиг.1 представлена функциональная схема предлагаемой СТЗ.
СТЗ состоит из процессора, передающего устройства, приемного контура, включающего синхронизирующее устройство, приемное устройство, коррелятор, базу данных окружающей обстановки и объектов.
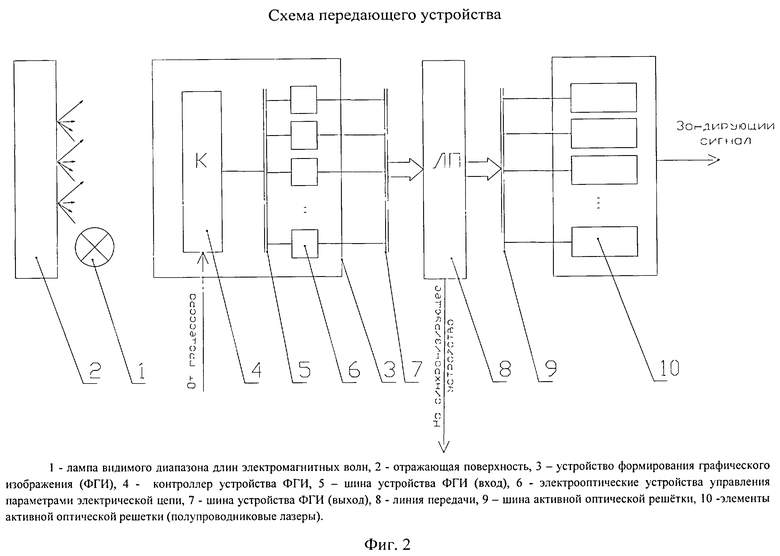
Передающее устройство представлено на фиг.2. Оно включает часть, формирующую графическое изображение, световую систему, электрооптические устройства управления параметрами электрической цепи, линию передачи и элементы активной оптической решетки.
Часть, формирующая графическое изображение, 3 состоит из контроллера 4 электрооптических устройств управления параметрами электрической цепи 6, которые подключены к нему через общую шину 5.
Световая система представляет собой лампу 1 видимого диапазона длин электромагнитных волн (с нитью накаливания, ртутную, светодиодную) и отражающую поверхность 2.
Линия передачи 8 служит для передачи и усиления управляющего сигнала через шины 7 и 9 на элементы активной оптической решетки 10, а также для выдачи сигнала в синхронизирующее устройство.
Элементами активной оптической решетки являются полупроводниковые лазеры, установленные под заданными различными углами для обеспечения безынерционного управления сканирующим лучом, а также для многолучевого сканирования.
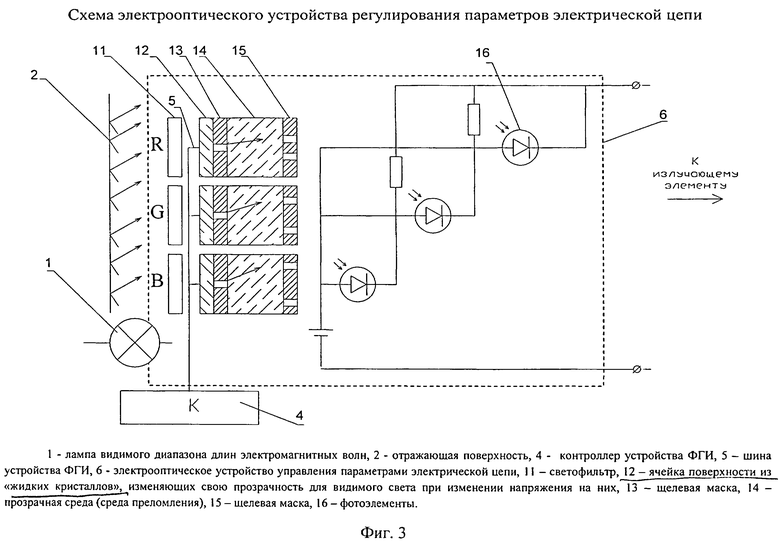
Основным элементом передающего устройства является электрооптическое устройство управления параметрами электрической цепи, представленное на фиг.3.
Электрооптическое устройство управления параметрами электрической цепи 6 состоит из оптической системы и входного каскада управляемой схемы.
Оптическая система состоит из светофильтра 11, поверхности из «жидких кристаллов» 12 с клеммами шины 5 для получения сигналов от контроллера 4, щелевых масок 13 и 15, среды преломления 14.
Входной каскад управляемой схемы является частью управляемой цепи формирования зондирующего импульса и содержит помимо источника питания фотоэлемент 16.
Регулирование параметров электрической цепи производится путем подачи света, идущего через отражающую поверхность 2 от лампы 1, через светофильтры 11 на поверхность из ячеек 12, заполненную веществом, изменяющим свою поляризацию под действием управляющего сигнала, подаваемого к клеммам 5 ячейки от контроллера 4 поверхности 12 для управления мощностью светового потока, который после прохождения через светофильтр 11 проходит через щель 13 в прозрачную среду 14, отклоняясь на определенный угол, соответствующий длине волны, и, попадая через щель 15 на фотоэлемент 16, являющийся управляющим элементом управляемой электрической цепи формирования зондирующего импульса, который, в свою очередь, позволяет току управляемой цепи протекать через ветвь, где находится данный управляющий элемент, тем самым повышая или снижая требуемые величины силы тока или напряжения, а также позволяя осуществить схему временной задержки для элементов активной оптической решетки 10.
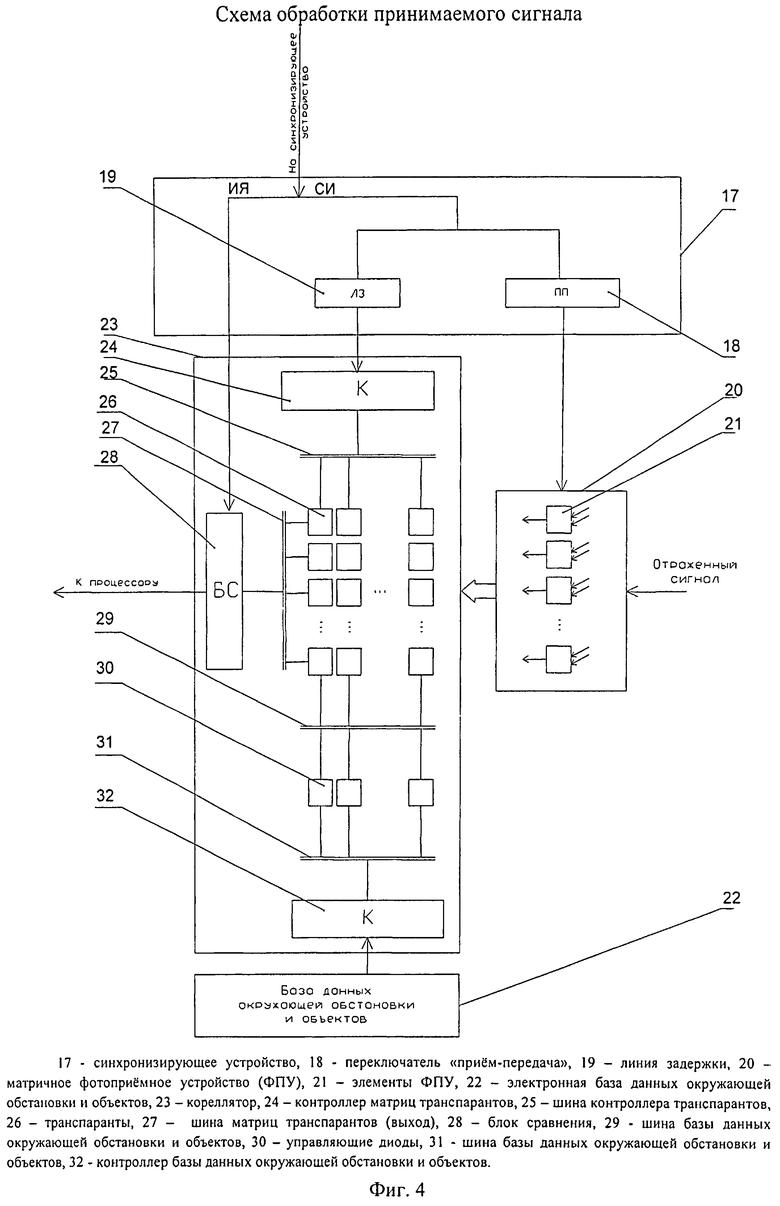
На фиг.4 представлена схема приемного контура, включающего синхронизирующее устройство, приемное устройство, коррелятор, базу данных окружающей обстановки и объектов.
Синхронизирующее устройство 17 получает сигнал, содержащий информацию об индексе элемента в излучающей решетке (сигнал ИЯ), поступающий в блок сравнения, и о параметрах зондирующего импульса (сигнал СИ) для переключателя «прием-передача» 18 и линии задержки 19 для реализации алгоритма функционирования каждого транспаранта в корреляторе 23.
После переключения в состояние приема отраженных импульсов с элементов 21 матричного фотоприемного устройства 20 начинают поступать сигналы. В то же время на транспаранты 26, представляющие собой полупроводники, подаются напряжения проводимости через контроллер 24 и шину 25 в соответствии с временем задержки линии 19, что предназначено для формирования поля обзора по дальности. За время одного цикла обзора с помощью базы данных окружающей обстановки и объектов 22 через контроллер 32 и шину 31 на управляющие диоды 30, подаются напряжения для последовательного формирования всех возможных транспарантов по текущей дальности (через шину 29).
Пропущенные через транспаранты сигналы с элементов 21 матричного фотоприемного устройства 20 через шину 27 поступают в блок сравнения 28, где происходит анализ сигнала с учетом данных о направленности элемента, который его излучил. Из блока сравнения откалиброванный в соответствии с пороговыми значениями сигнал поступает в процессор, где вычисляется текущее положение и обнаружение неучтенных объектов.
Предлагаемое изобретение позволит оснастить автономные роботизированные комплексы, автомобили, летательные аппараты быстродействующей, инвариантной к положению носителя системой технического зрения с расширенными возможностями управления лазерным лучом или несколькими, обеспечивающей обнаружение попадающих в поле зрения объектов и использующей голографические принципы для распознавания с возможностью топопривязки и динамического анализа сцен.
Литература
1. Нечаев А.И., Бурдыгин А.И., Буняков В.А. Оптико-электронная система целеуказания. IX научно-техническая конференция «Экстремальная робототехника». Спб.: СПбГПУ, 1998.
2. Каляев И.А., Капустян С.Г., Усачев Л.Ж. Системы технического зрения на базе сканирующих лазерных дальномеров. Наука - производству. №1. 1999 г.
3. А.с. №1689971 (СССР). Устройство для формирования карты местности перед транспортным средством. Л.Ж. Усачев. БИ №41, 1991 г.
4. Патент РФ №2193825. Способ обработки сигналов для определения координат объектов, наблюдаемых в последовательности телевизионных изображений, и устройство для его осуществления (варианты). Арцатбанов А.Ю.; Бачило С.А.; Итенберг И.И.; Калашников В.М.; Марков А.Л.; Наумов В.В.; Сивцов С.А.; Фоменко Г.А. 2002 г.
5. М. Skolnik: Radar handbook, MgGraw-Hill Book Company, b.4, 1970. Перевод с английского: под ред. М.М. Вейсбейна, М., 1978.
6. Kulcke W., C.J. Harris, К. Kosanke, and E. Max: A Fast, Digital-indexed Light Deflector. - "IBM j.Res. Develop.", 1964, January, v.8, p.64-67.
7. Harris T.S., and j.Lipp.: Digital Laser Beam Deflection. - "Laser Focus", 1967, April, v.3, p.26-32.
8. Pole R.V., et al.: Selectivity Degenerate Laser Cavity, IBM Walson Res. Center, Tech, Repl, AFAL-TR-67-127. 1967.
9. Fletcher P.: Electro-optical System Rept. 1920, NASA-2439, 1961, October.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРООПТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ | 2012 |
|
RU2507558C2 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| ОПТИЧЕСКОЕ УСТРОЙСТВО | 2012 |
|
RU2514162C1 |
| ОПТИЧЕСКИЙ КОРРЕЛЯТОР | 2002 |
|
RU2212054C1 |
| Устройство для воспроизведения логических функций | 1988 |
|
SU1837330A1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА КОНТРОЛЯ ТОЛЩИНЫ И МАССЫ ДИЭЛЕКТРИЧЕСКИХ ПЛОСКИХ ИЗДЕЛИЙ | 2018 |
|
RU2701783C2 |
| КОГЕРЕНТНО-ОПТИЧЕСКИЙ СПЕКТРОАНАЛИЗАТОР ИЗОБРАЖЕНИЙ | 1996 |
|
RU2098857C1 |
| Система стабилизации мощности лазерного излучения и способ ее применения | 2023 |
|
RU2824023C1 |
| Устройство для ввода информации | 1989 |
|
SU1714643A1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА МНОГОРАКУРСНОГО ЦВЕТНОГО ОБЪЕМНОГО ИЗОБРАЖЕНИЯ | 1989 |
|
RU2011312C1 |
Изобретение относится к области получения и обработки изображений. Технический результат заключается в обеспечении безинерционной системы управления лучом с электроскопической схемой регулирования параметров сигнала. В системе подают сигнал через светофильтры на поверхность из ячеек, заполненную веществом, поляризующимся под действием сигнала контроллера для управления его световым потоком. После прохождения через светофильтр поток дифрагирует на щели и проходит через прозрачную среду, отклоняясь на определенный угол, равный длине волны, попадая на фотоэлемент, являющийся управляющим элементом электрической цепи, который позволяет току протекать через ветвь, где находится управляющий элемент, повышая или снижая силу тока или напряжение. Распознавание и топопривязка осуществляется при использовании голографических методов распознавания путем формирования транспарантов из полупроводниковых элементов с использованием информации о параметрах зондирующего сигнала и информации об окружающей обстановке из встроенной базы данных. 4 ил.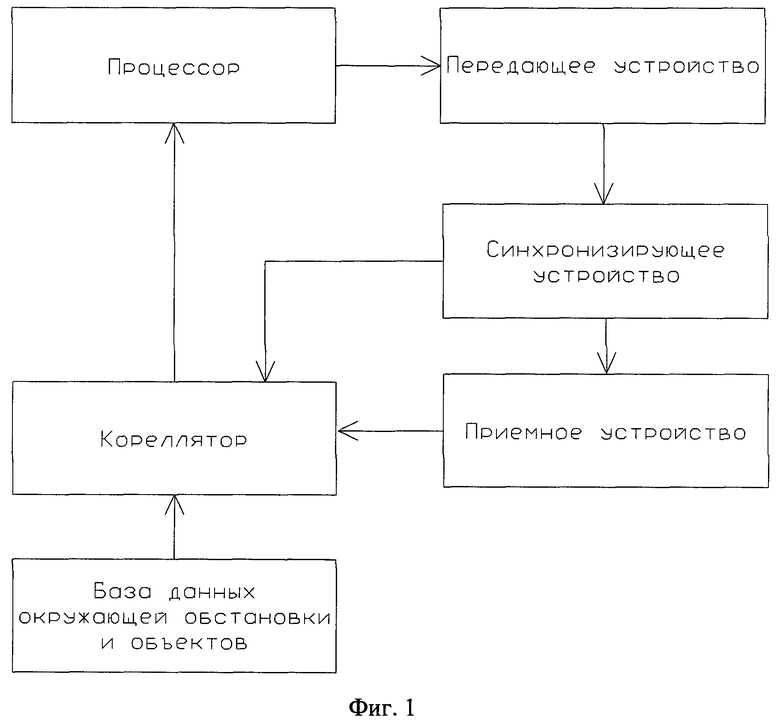
Система технического зрения, содержащая процессор, передающее устройство, которое включает контроллер, шину, электрооптическое устройство управления параметрами электрической цепи, включающее оптическую систему из светофильтра, поверхность из «жидких кристаллов» с клеммами для получения сигналов от контроллера через шину, щелевые маски, среду преломления и входной каскад с фотоэлементом световой системы, линию передачи и элементы активной оптической решетки, приемный контур, который состоит из синхронизирующего устройства, устройства, содержащего базу данных окружающей обстановки и объектов, приемное устройство на матрице из фотоэлементов, коррелятора, включающего транспаранты на матрице из полупроводниковых элементов, шины, контроллеры для управления проводимостью транспарантов и блок сравнения, отличающаяся тем, что контроллер предназначен для формирования зондирующего луча по команде от процессора с помощью передающего устройства, где осуществляется управление зондирующим лучом и регулирование его параметров путем регулирования светового потока через светофильтры на поверхность из ячеек, заполненную веществом, поляризующимся под действием управляющего сигнала контроллера и изменяющего световой поток, который после прохождения через светофильтр дифрагирует на щели и проходит через прозрачную среду, отклоняясь на определенный угол, соответствующий длине волны, и, попадая на фотоэлемент (фотодиод, фототранзистор, фотосопротивление), который предназначен для управления параметрами электрической цепи, включающей элементы активной оптической решетки, которая непосредственно формирует зондирующий луч, при этом приемное устройство предназначено для приема и распознавания отраженного сигнала с использованием голографических методов корреляционного распознавания путем формирования транспарантов из полупроводниковых элементов, получающих сигнал от синхронизирующего устройства о параметрах зондирующего сигнала и сигнал с априорной информацией об окружающей обстановке из встроенной базы данных и предназначенных для изменения параметров сигнала с фотоэлементов приемного устройства при прохождении через них и последующей передачи его в блок сравнения, на выходе которого появляются откалиброванные в соответствии с пороговыми значениями сигналы, являющиеся входом в процессор системы технического зрения, который осуществляет обнаружение, распознавание и топопривязку.
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ И ЛИНЕЙНЫХ РАЗМЕРОВ ОБЪЕКТОВ ПО ИХ ТЕЛЕВИЗИОННЫМ ИЗОБРАЖЕНИЯМ | 2008 |
|
RU2381521C2 |
| ТРЕХПОЗИЦИОННЫЙ НЕПОЛЯРИЗОВАННЫЙ ПОВОРОТНЫЙ ЭЛЕКТРОМАГНИТНЫЙ МЕХАНИЗМ | 1946 |
|
SU69284A1 |
| СИСТЕМА ТЕХНИЧЕСКОГО ЗРЕНИЯ ДЛЯ КОНТРОЛЯ ФОРМЫ ИЗДЕЛИЙ | 1999 |
|
RU2158959C2 |
| Способ сушки нитей основы на шлихтовальной машине | 1950 |
|
SU86912A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

