УРОВЕНЬ ТЕХНИКИ
1. Область техники
Настоящее раскрытие относится к роботу-уборщику, а более конкретно к роботу-уборщику, имеющему функцию распознавания звука и способному обнаруживать ненормальную ситуацию с ее помощью, и к способу управления им.
2. Уровень техники изобретения
Обычно робот разрабатывался для промышленного использования и управлял некоторыми частями автоматизации производства. Поскольку в последнее время робот применяется к различным областям, разрабатываются медицинские роботы, космические роботы, домашние роботы и т.д.
Представителем домашнего робота является робот-уборщик, вид домашнего электронного прибора, который может выполнять операцию уборки посредством всасывания окружающей пыли или посторонних материалов, в то же время автономно перемещаясь по предварительно определенной области. Такой робот-уборщик снабжен заряжаемой батареей и снабжен датчиком препятствий для избегания препятствия во время перемещения.
Способ управления таким роботом-уборщиком включает в себя способ, использующий пульт дистанционного управления (пользовательский интерфейс), причем способ использует кнопку, предусмотренную на корпусе робота-уборщика и т.д. В последнее время разрабатывается робот-уборщик, имеющий сетевую функцию. Такой робот-уборщик снабжен функцией для удаленного управления посредством команды уборки или функцией наблюдения за ситуациями внутри помещения. Дополнительно, разрабатываются мобильные роботы, способные распознавать собственное положение и создавать карту с помощью камер или датчиков различных типов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Следовательно, аспектом подробного описания является предоставление робота-уборщика, способного обнаруживать направление источника звука или положение источника звука с помощью одного или более микрофонов и способного наблюдать за обстановкой посредством распознавания характерного звука события, и способа управления таковым.
Другим аспектом подробного описания является предоставление робота-уборщика, способного распознавать звук события надежным и точным образом, посредством обновления функции распознавания звука с помощью звукового окружения, и способа управления таковым.
Еще одним аспектном подробного описания является предоставление робота-уборщика, способного перемещаться в обнаруженном направлении или к положению источника звука относительно звука события, способного обнаруживать информацию изображения или определять, произошла ли ненормальная ситуация, и способного предоставлять такую информацию через сеть связи, и способа управления таковым.
Чтобы добиваться этих и других преимуществ и в соответствии с целью данного описания, которая сформулирована и подробно описана в данном документе, предоставляется робот-уборщик, содержащий: блок ввода звука, имеющий один или несколько микрофонов и сконфигурированный, чтобы принимать звуковое окружение; блок распознавания звука, сконфигурированный, чтобы распознавать принятое звуковое окружение способом разделения на звук события и звук окружающей среды; и блок вывода сообщения, сконфигурированный, чтобы выводить сообщение, соответствующее звуку события или звуку окружающей среды. Робот-уборщик может дополнительно содержать блок управления, сконфигурированный, чтобы обнаруживать направление или положение источника звука относительно звука события.
Согласно другому варианту осуществления настоящего изобретения предоставляется робот-уборщик, содержащий: корпус уборщика; приводной блок, имеющий колесный электромотор для приведения в движение одного или более колес, установленных в нижней части корпуса уборщика, и сконфигурированный, чтобы перемещать корпус уборщика согласно управляющему сигналу; блок очистки, имеющий всасывающий электромотор для всасывания воздуха, имеющий средство сбора пыли и сконфигурированный, чтобы всасывать посторонние материалы; блок ввода звука, имеющий один или более микрофонов внутри или снаружи корпуса уборщика и сконфигурированный, чтобы принимать звуковое окружение; блок распознавания звука, сконфигурированный, чтобы распознавать принятое звуковое окружение способом разделения на звук события и звук окружающей среды; и блок управления, сконфигурированный, чтобы обнаруживать направление или положение источника звука относительно звука события и сконфигурированный, чтобы генерировать управляющий сигнал.
Робот-уборщик может дополнительно содержать блок обнаружения изображения, сконфигурированный, чтобы обнаруживать информацию изображения посредством захвата периферии положения источника звука. Робот-уборщик может дополнительно содержать блок связи, сконфигурированный, чтобы передавать, через сеть связи, сообщение, или информацию изображения, или как сообщение, так и информацию изображения.
Чтобы добиваться этих и других преимуществ и в соответствии с целью данного описания, которая сформулирована и подробно описана в данном документе, также предоставляется способ управления роботом-уборщиком, содержащий: прием звукового окружения с помощью одного или более микрофонов; распознавание принятого звукового окружения способом разделения на звук события и звук окружающей среды; и вывод сообщения, соответствующего звуку события или звуку окружающей среды.
Согласно другому варианту осуществления настоящего изобретения предоставляется способ управления роботом-уборщиком, содержащий: прием звукового окружения с помощью одного или более микрофонов; обнаружение направления или положения источника звука относительно звука события; распознавание принятого звукового окружения способом разделения на звук события и звук окружающей среды; вывод сообщения, соответствующего звуку события или звуку окружающей среды; перемещение робота-уборщика к положению источника звука; и обнаружение информации изображения по положению источника звука.
Настоящее изобретение может иметь следующие преимущества.
Во-первых, направление источника звука и положение источника звука могут быть обнаружены посредством одного или более микрофонов, например, трех микрофонов, и характерный звук события может быть распознан. Затем распознанный характерный звук события может быть выведен к корпусу уборщика в форме сообщения или может быть предоставлен через сеть связи. Это может позволять легко наблюдать за обстановкой.
Во-вторых, функция распознавания звука может быть обновлена с помощью звукового окружения для распознавания звука из фонового шума и шума окружающей среды надежным и точным образом. Это может улучшать скорость распознавания звука и улучшать стабильность и эффективность.
В-третьих, робот-уборщик может перемещаться в обнаруженном направлении или к положению источника звука относительно звука события. Таким образом информация изображения может быть обнаружена, или может быть определено, произошла или нет ненормальная ситуация. Такая информация может быть предоставлена по сети связи.
В-четвертых, в случае модели, имеющей камеру, может быть обнаружено, возник или нет звук события. Это может не допускать возникновение мертвой зоны, получающейся в результате того, что камера не может захватывать объект в диапазоне 360°.
В-пятых, 24-часовая автоматизированная функция контроля безопасности может выполняться с помощью 24-часовой службы распознавания звука.
В-шестых, настоящее изобретение может быть применено к мобильному роботу в другой области, например, роботу-охраннику для общественной безопасности, способному предоставлять услугу обеспечения безопасности для людей посредством наблюдения/защиты ограниченной области независимо или способом взаимодействия с системой безопасности и посредством охраны человеческой жизни и собственности.
В-седьмых, при возникновении столкновения между транспортными средствами или столкновении между человеком и транспортным средством робот-уборщик настоящего изобретения может собирать фактические данные посредством оценки положения или направления аварии и затем посредством перемещения камеры в этом направлении. Дополнительно, робот-уборщик может применяться, чтобы не нарушать движение транспортного средства аварийной службы.
Дальнейшая сфера применения настоящей заявки станет более очевидной из детального описания, приведенного ниже. Однако должно быть понятно, что детальное описание и конкретные примеры, при указании предпочтительных вариантов осуществления изобретения, даны только в качестве иллюстрации, так как различные изменения и модификации в пределах сущности и объема изобретения станут очевидными специалистам в области техники из детального описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопровождающие чертежи, которые включены для того, чтобы обеспечивать дополнительное понимание изобретения, объединены и составляют часть данного описания, иллюстрируют примерные варианты осуществления и вместе с описанием служат для разъяснения принципов изобретения.
НА ЧЕРТЕЖАХ:
Фиг. 1 - это вид в перспективе, показывающий внешний вид робота-уборщика согласно предпочтительным вариантам осуществления настоящего изобретения;
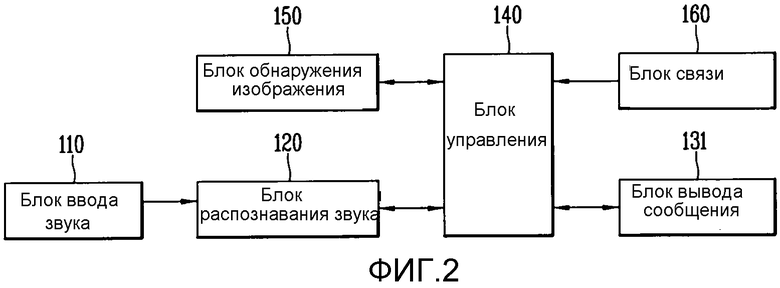
Фиг. 2 - это структурная схема, показывающая подробную конфигурацию робота-уборщика согласно одному варианту осуществления;
Фиг. 3 - это подробная структурная схема, показывающая блок распознавания звука робота-уборщика согласно предпочтительным вариантам осуществления настоящего изобретения;
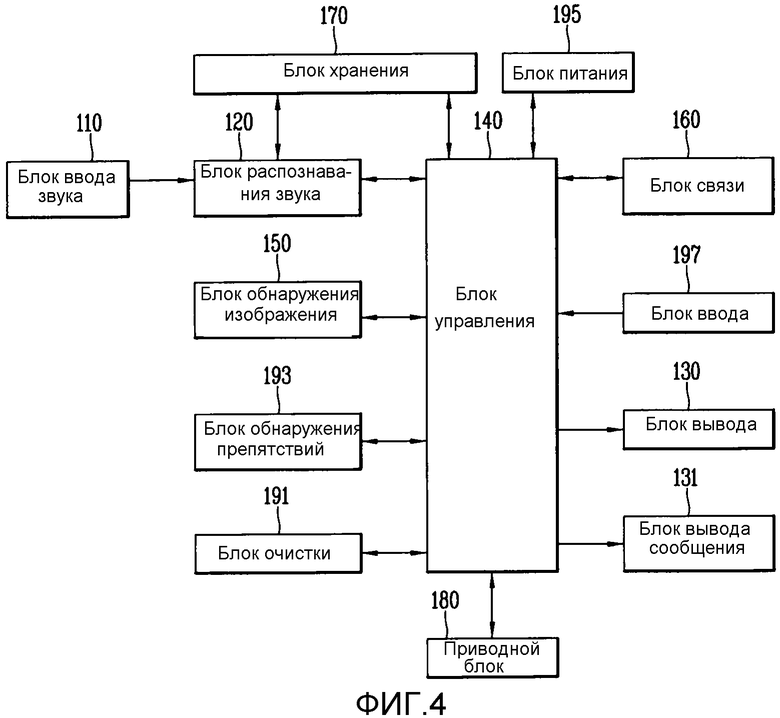
Фиг. 4 - это структурная схема, показывающая подробную конфигурацию робота-уборщика согласно другому варианту осуществления;
Фиг. 5 - это вид, схематично показывающий систему удаленного наблюдения, использующую робот-уборщик согласно одному варианту осуществления;
Фиг. 6 и 7 - это блок-схемы последовательностей операций, показывающие способ управления роботом-уборщиком согласно предпочтительным вариантам осуществления настоящего изобретения; и
Фиг. 8 - это блок-схема последовательности операций для объяснения операции распознавания звука робота-уборщика согласно предпочтительным вариантам осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Сейчас будет приведено описание в деталях примерных вариантов осуществления со ссылкой на сопровождающие чертежи. Ради краткости описания со ссылкой на чертежи, одинаковые или эквивалентные компоненты будут снабжены одинаковыми ссылочными номерами, и их описание не будет повторяться.
Обращаясь к фиг. 1 и 2, робот-уборщик согласно одному варианту осуществления содержит: блок 110 ввода звука, имеющий один или более микрофонов и сконфигурированный, чтобы принимать звуковое окружение; блок 120 распознавания звука, сконфигурированный, чтобы распознавать принятое звуковое окружение способом разделения на звук события и звук окружающей среды; и блок 131 вывода сообщения, сконфигурированный, чтобы выводить сообщение, соответствующее звуку события или звуку окружающей среды. Здесь, звук события указывает звук разбивания объекта, такого как окно, звук человека или звук животного, звук от ноги, звук падения объекта, звук взрыва, звук оружия и т.д. Звук окружающей среды указывает уникальный звук обстановки и включает в себя шум и т.д. Звук окружающей среды изменяется согласно положению, в котором робот-уборщик находится. Например, в случае жилой комнаты, где включен телевизор, звук окружающей среды включает в себя звук, издаваемый из телевизора.
Блок 110 ввода звука может быть сконфигурирован в форме многоканальной установки микрофонов. Блок 110 ввода звука включает в себя упомянутые по меньшей мере три микрофона. Как показано на фиг. 1, три микрофона расположены внутри или снаружи робота-уборщика с постоянными расстояниями друг от друга. Такая компоновка может быть определена посредством экспериментов, так что направление или положение источника звука относительно звука события может быть легко обнаружено.
Блок 120 распознавания звука выполняет формирование пучка источника звука, так что только звук от источника звука может быть принят, причем источник звука этого направления оценивается прежде всего. Т.е. блок 120 распознавания звука улучшает качество звука на основе (или с помощью) технологии разделения источника звука. Блок 120 распознавания звука распознает только определенный характерный звук события, в то же время отклоняя звук окружающей среды или неопределенный звук. Также блок 120 распознавания звука проверяет достоверность распознанного звука события.
Блок 131 вывода сообщения, разновидность блока 130 вывода, сконфигурирован, чтобы выводить распознанный звук события, положение источника звука, направление источника звука, тип звука и т.д. в форме сообщения. Блок 130 вывода сообщения может быть дополнительно снабжен динамиком и т.д. и может выводить такую информацию после преобразования в сигнал тревоги, голосовое сообщение и т.д.
Обращаясь к фиг. 2, блок управления робота-уборщика дополнительно содержит блок 140 управления, сконфигурированный, чтобы обнаруживать направление или положение источника звука относительно звука события. В случае, когда блок 140 управления снабжен двумя или более микрофонами, блок 140 управления обнаруживает направление или положение источника звука на основе разницы времени источников звука, генерируемой от соответствующих микрофонов. Направление источника звука или положение источника звука может быть обнаружено посредством блока 120 распознавания звука.
Как показано на фиг. 5, робот-уборщик 10, и терминальное устройство 20, соединенное с роботом-уборщиком 10 через сеть связи, могут составлять систему удаленного управления. Терминальное устройство 20 может принимать информацию от робота-уборщика и затем предоставлять принятую информацию пользователю. Терминальное устройство 20 может принимать команду управления от пользователя и генерировать сигнал управления на основе команды управления, тем самым, удаленно управляя роботом-уборщиком.
Терминальное устройство 20 может быть классифицировано на мобильный/переносной терминал и стационарный терминал согласно состоянию подвижности, что включает в себя как мобильный терминал, так и стационарный терминал. Дополнительно, терминальное устройство 20 может быть классифицировано на переносной терминал и установленный в транспортном средстве терминал согласно непосредственно состоянию подвижности пользователя, что включает в себя как переносной терминал, так и установленный в транспортном средстве терминал. Например, терминальное устройство включает в себя сотовый телефон (PCS-телефон), смартфон, переносной компьютер (портативный компьютер), терминал цифрового вещания, PDA (персональный цифровой помощник), PMP (портативный мультимедийный проигрыватель), навигационную систему и т.д. Система удаленного управления может иметь различную схему сети согласно типу терминального устройства. Например, портативный телефон или смартфон и т.д. могут использовать сеть мобильной связи, такую как 3G, CDMA и WCDMA. И робот-уборщик и терминальное устройство принимают и передают беспроводные сигналы, по сети мобильной связи, с базовой станцией, внешним терминалом, сервером и т.д.
Обращаясь к фиг. 1 и 2, робот-уборщик дополнительно содержит блок 150 обнаружения изображения, сконфигурированный, чтобы обнаруживать информацию изображения, захватывая положение источника звука. Блок 150 обнаружения изображения снабжен датчиком верхней камеры, установленным в направлении верхней стороны или передней стороны. В случае, когда блок 150 обнаружения изображения снабжен множеством датчиков верхней камеры, датчики камеры могут быть сформированы на верхней части или боковой поверхности робота-уборщика с постоянным расстоянием друг от друга или под постоянными углами друг относительно друга.
После того как блок 120 распознавания звука распознает звук события, блок 140 управления обнаруживает положение или направление источника звука относительно звука события. И блок 140 управления перемещает робота-уборщика к положению источника звука или в направлении источника звука. Затем блок 150 обнаружения изображения обнаруживает информацию изображения, захватывая периферию соответствующего положения источника звука. Блок 140 управления может определять, произошла или нет ненормальная ситуация, на основе последовательно обнаруженной информации изображения. Например, блок 140 управления определяет перемещение объекта на основе (или с помощью) последовательно обнаруженной информации изображения и определяет, произошла ли кража со взломом или пожар, на основе определенного перемещения. Блок 131 вывода сообщения может дополнительно выводить сигнализирующее сообщение при возникновении ненормальной ситуации.
Блок 150 обнаружения изображения может использоваться в качестве другого типа блока распознавания положения. Блок 150 обнаружения изображения может дополнительно включать в себя объектив, соединенный с камерой и фокусирующийся на субъекте, контроллер, сконфигурированный, чтобы управлять камерой, и контроллер объектива, сконфигурированный, чтобы управлять объективом. В качестве объектива используется объектив, имеющий широкий угол обзора, так что широкая периферийная область может быть захвачена из предписанного положения. Блок 140 управления может извлекать характерные точки из информации изображения, захваченной посредством блока обнаружения изображения, может распознавать положение робота-уборщика на основе характерных точек и может создавать карту уборки относительно области уборки.
Робот-уборщик дополнительно содержит блок 160 связи, сконфигурированный, чтобы передавать, через сеть связи, сообщение, или информацию изображения, или и сообщение, и информацию изображения. Блок 160 связи соединен с терминальным устройством и т.д. одним из способа проводной связи, способа беспроводной связи и способа спутниковой связи, т.е. одним из доступных в настоящее время способов связи, таким образом, передавая сообщение, звуковую информацию, информацию изображения и т.д. терминальному устройству и принимая данные от терминального устройства. Блок 160 связи принимает сигнал управления от терминального устройства. Блок 160 связи передает, терминальному устройству, информацию о состоянии, информацию о препятствии, информацию о положении, карту уборки и т.д. относительно робота-уборщика. Дополнительно, блок 160 связи может выполнять связь с терминальным устройством с помощью одного из способов радиосвязи ближнего действия, таких как радиочастотная (RF) связь, Bluetooth, инфракрасная связь (IrDA), беспроводная LAN и zigbee. Например, когда терминальное устройство является смартфоном, робот-уборщик может быть снабжен блоком связи согласно схеме связи, где смартфон доступен.
Обращаясь к фиг. 1 и 4, робот-уборщик согласно другому варианту осуществления содержит корпус уборщика, приводной блок 180, блок 191 очистки, блок 110 ввода звука, блок 120 распознавания звука и блок 140 управления.
Приводной блок 180 снабжен одним или более колесными электромоторами для приведения в движение одного или более колес, установленных в нижней части корпуса уборщика, и сконфигурирован, чтобы перемещать корпус уборщика посредством управляющего сигнала. Робот-уборщик снабжен правым и левым основными колесами с правой и левой сторон своей нижней части. Ручка для облегчения захвата пользователем может быть установлена на две боковые поверхности основных колес. Колесные электромоторы соединены с основными колесами, соответственно, таким образом, что основные колеса могут вращаться. Колесные электромоторы работают независимо друг от друга и могут вращаться в двух направлениях. Робот-уборщик снабжен одним или более вспомогательными колесами на своей задней поверхности, таким образом, поддерживая корпус уборщика, минимизируя трение между нижней поверхностью корпуса уборщика и поверхностью основания (поверхностью, которая должна быть очищена) и плавно перемещая робота-уборщика.
Блок 191 очистки снабжен всасывающим электромотором для всасывания воздуха, снабжен средством сбора пыли и сконфигурирован, чтобы всасывать посторонние материалы. Т.е. блок 191 очистки включает в себя контейнер для пыли, сконфигурированный, чтобы хранить в нем собранную пыль, засасывающий вентилятор, сконфигурированный, чтобы обеспечивать движущую силу для всасывания пыли, которая находится в области уборки, и всасывающий электромотор, сконфигурированный, чтобы всасывать воздух посредством вращения засасывающего вентилятора. И блок 191 очистки сконфигурирован, чтобы всасывать окружающую пыль или посторонние материалы. Блок 191 очистки дополнительно включает в себя вращающуюся щетку, установленную с возможностью вращения на нижней части корпуса уборщика, и боковую щетку, сконфигурированную, чтобы очищать край или угол области уборки, такой как стена, в то же время вращаясь вокруг вала вращения, расположенного в вертикальном направлении корпуса уборщика. Вращающаяся щетка сконфигурирована, чтобы поднимать пыль, которая находится на полу или ковре, в воздух, при этом вращая проходящий справа налево вал корпуса уборщика. Множество лопастей предусмотрены на внешней периферийной поверхности вращающейся щетки в спиральном направлении. Щетки могут быть предусмотрены между лопастями.
Блок 110 ввода звука снабжен одним или более микрофонами внутри или снаружи корпуса уборщика и сконфигурирован, чтобы принимать звуковое окружение. Блок 120 распознавания звука сконфигурирован, чтобы распознавать звуковое окружение способом разделения на звук события и звук окружающей среды. Блок 140 управления сконфигурирован, чтобы обнаруживать направление или положение источника звука относительно звука события и генерировать управляющий сигнал.
Обращаясь к фиг. 4, робот-уборщик дополнительно содержит блок 131 вывода сообщения, сконфигурированный, чтобы выводить сообщение, соответствующее звуку события или звуку окружающей среды. Робот-уборщик может дополнительно содержать блок 150 обнаружения изображения, сконфигурированный, чтобы обнаруживать информацию изображения посредством захвата периферии положения источника звука. Робот-уборщик может дополнительно содержать блок 160 связи, сконфигурированный, чтобы передавать, через сеть связи, сообщение, или информацию изображения, или как сообщение, так и информацию изображения. Блок вывода сообщения, блок обнаружения изображения и блок связи выше упомянуты в одном варианте осуществления, и, таким образом, подробные их объяснения будут опущены.
Обращаясь к фиг. 1 и 4, робот-уборщик согласно предпочтительным вариантам осуществления настоящего изобретения может дополнительно содержать блок 193 обнаружения препятствий, имеющий один или более датчиков и сконфигурированный, чтобы выводить информацию о препятствии, обнаруживая внешнее препятствие. Блок 140 управления создает карту уборки на основе информации о препятствиях.
Как показано на фиг. 1, блок 193 обнаружения препятствий включает в себя первые датчики, установленные на передней поверхности, т.е. на внешней периферийной поверхности робота-уборщика, с постоянными интервалами друг от друга. Блок 193 обнаружения препятствий может включать в себя вторые датчики, выступающие наружу из корпуса уборщика. Положения и типы первых и вторых датчиков могут быть переменными согласно типу робота-уборщика. И блок обнаружения препятствий может включать в себя различные датчики. Первые датчики сконфигурированы, чтобы обнаруживать объект, расположенный на пути перемещения робота-уборщика, т.е. препятствие, и сконфигурированы, чтобы передавать информацию обнаружения блоку 140 управления. Более конкретно, первые датчики обнаруживают выступы, бытовые электроприборы, мебель, поверхность стены, край стены и т.д., расположенные на пути перемещения робота-уборщика, и передают информацию о препятствии блоку управления. Первый датчик может быть реализован как датчик инфракрасного излучения, ультразвуковой датчик, RF-датчик, геомагнитный датчик и т.д. Вторые датчики сконфигурированы, чтобы обнаруживать препятствие, расположенное с передней стороны или с боковой стороны и передавать информацию о препятствии блоку управления. Т.е. вторые датчики обнаруживают выступы, бытовые электроприборы, мебель, поверхность стены, край стены и т.д., расположенные на пути перемещения робота-уборщика, и передают информацию о препятствии блоку управления. Второй датчик может быть реализован как датчик инфракрасного излучения, ультразвуковой датчик, RF-датчик, PSD (позиционно-чувствительное устройство) датчик и т.д.
Блок 193 обнаружения препятствий может дополнительно включать в себя датчик откоса, установленный на нижней поверхности корпуса уборщика и сконфигурированный, чтобы обнаруживать препятствие, которое находится на полу, например, откос. Датчик откоса сконфигурирован, чтобы получать стабильные значения измерений, несмотря на отражательную способность пола и цветовое различие. Аналогично PSD-датчику, датчик откоса может быть реализован в форме модуля инфракрасного излучения.
Блок 193 обнаружения препятствий может дополнительно включать в себя датчик зарядного сигнала для приема направляющего сигнала, генерируемого из зарядной станции. Робот-уборщик принимает направляющий сигнал, передаваемый от зарядной станции, с помощью датчика сигналов зарядки, таким образом, проверяя положение и направление зарядной станции. Зарядная станция генерирует направляющий сигнал, указывающий направление и расстояние, так что робот-уборщик может возвращаться к зарядной станции. Робот-уборщик принимает направляющий сигнал, передаваемый от зарядной станции, определяет текущее положение и задает направление движения. Затем робот-уборщик возвращается к зарядной станции. Датчик зарядного сигнала может быть реализован как датчик инфракрасного излучения, ультразвуковой датчик, радиочастотный (RF) датчик и т.д., и может, как правило, использоваться как датчик инфракрасного излучения. Датчик зарядного сигнала предусмотрен на внутренней или внешней стороне робота-уборщика. Например, датчик зарядного сигнала может быть установлен под блоком 130 вывода или на периферии блока 150 обнаружения изображения.
Робот-уборщик может дополнительно содержать блок распознавания положения (не показан), имеющий один или более датчиков и сконфигурированный, чтобы выводить информацию о положении посредством распознавания положения робота-уборщика на основании сигналов обнаружения, полученных от датчиков. Блок 140 управления может корректировать карту уборки с помощью информации о положении, выведенной из блока распознавания положения. Дополнительно, блок 140 управления может более точно обнаруживать положение или направление источника звука относительно звука события с помощью информации о препятствии, обнаруженной блоком обнаружения препятствий, информации о положении, распознанной блоком распознавания положения, карты уборки и т.д.
Блок распознавания положения включает в себя датчик нижней камеры, предусмотренный на задней поверхности робота-уборщика и сконфигурированный, чтобы захватывать пол (т.е., поверхность, которая должна быть очищена), пока робот-уборщик движется. Датчик нижней камеры называется ″датчиком оптического потока″ и преобразует изображение нижней стороны, введенное от датчика изображения, предусмотренного в нем, таким образом, чтобы создавать предварительно определенный тип данных изображения. Данные нижней камеры могут обнаруживать положение робота-уборщика, несмотря на скольжение робота-уборщика. Блок 140 управления в реальном времени сравнивает данные изображения, захваченные датчиком нижней камеры, друг с другом, таким образом, чтобы вычислять расстояние перемещения и направление перемещения, тем самым вычисляя положение робота-уборщика. Поскольку нижняя сторона робота-уборщика отслеживается датчиком нижней камеры, контроллер может компенсировать ошибку вследствие скольжения робота-уборщика, скольжения, возникающего в положении, вычисленном другим средством.
Блок распознавания положения дополнительно включает в себя датчик ускорения, сконфигурированный, чтобы воспринимать изменение скорости движения, вследствие запуска, остановки, преобразования направления, столкновения с объектом и т.д. Датчик ускорения может быть прикреплен к области, близкой к основным колесам или вспомогательным колесам, и может воспринимать проскальзывание или холостое вращение колес. Скорость движения робота-уборщика может быть вычислена на основе ускорения, воспринятого датчиком ускорения, и вычисленная скорость движения сравнивается с опорной скоростью, таким образом, оценивая или компенсируя положение робота-уборщика. Однако датчик ускорения, как правило, установлен в блоке управления и воспринимает изменение скорости робота-уборщика, возникающее в режиме уборки или режиме движения. Т.е. датчик ускорения воспринимает величину воздействия вследствие изменения скорости и выводит напряжение, соответствующее величине воздействия. Соответственно, датчик ускорения может выполнять функции электронного бампера.
Блок распознавания положения дополнительно включает в себя гиродатчик, сконфигурированный, чтобы воспринимать направление поворота и угол поворота, когда робот-уборщик движется или убирает. Гиродатчик воспринимает угловую скорость робота-уборщика и выводит напряжение, пропорциональное угловой скорости. Блок 140 управления вычисляет направление поворота и угол поворота робота-уборщика на основе напряжения, выведенного из гиродатчика.
Блок распознавания положения может дополнительно включать в себя колесные датчики, соединенные с правым и левым основными колесами и воспринимающие частоту вращения (RPM) правого и левого основных колес. Колесные датчики могут быть реализованы как кодовый датчик угла поворота. Когда робот-уборщик перемещается в режиме движения или режиме уборки, кодовый датчик угла поворота воспринимает RPM правого и левого основных колес и выводит воспринятые RPM. Блок 140 управления может вычислять скорости вращения правого и левого основных колес на основе воспринятых RPM.
Блок 140 управления может точно распознавать положение робота-уборщика на основе информации обнаружения, воспринятой датчиком ускорения, гиродатчиком, колесным датчиком и датчиком нижней камеры, и информации изображения, полученной блоком обнаружения изображения. И блок 140 управления может точно создавать карту уборки на основе положения робота-уборщика, положения, распознанного на основе информации о препятствии, полученной блоком обнаружения препятствий, и информации изображения, полученной блоком обнаружения изображения. Блок 160 связи передает терминальному устройству 20 данные, включающие в себя информацию изображения, информацию о препятствии, информацию о положении, карту уборки, область уборки и т.д.
Робот-уборщик может дополнительно содержать блок 197 ввода, через который пользователь непосредственно вводит управляющую команду роботу-уборщику. Пользователь может вводить, через блок ввода, команду, инструктирующую вывод одной или более информации из сохраненной информации. Блок 197 ввода может быть реализован как одна или более кнопок. Например, блок 197 ввода может включать в себя кнопку OK и кнопку установки. Кнопка OK используется, чтобы вводить команду для подтверждения информации о препятствии, информации о положении, информации изображения, области уборки, карты уборки и т.д. Кнопка установки используется, чтобы вводить команду для установки такой информации. Блок ввода может быть снабжен кнопкой сброса для ввода команды сброса такой информации, кнопкой удаления, кнопкой начала уборки, кнопкой остановки и т.д. В качестве другого примера, блок 197 ввода может быть снабжен кнопкой для установки информации резервирования или кнопкой для удаления информации резервирования. Блок 197 ввода может быть дополнительно снабжен кнопкой для установки режима уборки или кнопкой для изменения режима уборки. Блок 197 ввода может быть дополнительно снабжен кнопкой для ввода команды, инструктирующей роботу-уборщику возвращаться к зарядной станции. Блок 197 ввода может быть установлен в верхней части робота-уборщика в форме аппаратных или программируемых клавиш, воспринимающей касание (сенсорной) панели и т.д. Блок 197 ввода может быть реализован в форме воспринимающего касание экрана вместе с блоком 130 вывода.
Как показано на фиг. 1, блок 130 вывода установлен в верхней части робота-уборщика. Однако положение установки или тип установки могут изменяться. Например, блок 130 вывода выводит, на экран, информацию резервирования, состояние батареи, интенсивность уборки, протяженность пространства, операцию уборки или передвижения в зигзагообразной форме и т.д. Блок 130 вывода может выводить текущее состояние уборки робота-уборщика и текущее состояние каждого блока робота-уборщика. Блок 130 вывода может отображать на экране информацию о препятствии, информацию о положении, информацию изображения, карту уборки, область уборки и т.д. Блок 130 вывода может быть реализован как один из светоизлучающего диода (LED), жидкокристаллического дисплея (LCD), плазменной панели отображения (PDP) и органического светоизлучающего диода (OLED).
Робот-уборщик может дополнительно содержать блок 195 питания. Блок 195 питания снабжен заряжаемой батареей, чтобы подавать питание в робот-уборщик. Блок 195 питания подает к каждому блоку питание привода и рабочее питание, требуемые, когда робот-уборщик перемещается, или когда робот-уборщик выполняет операцию уборки. Когда оставшееся количество питания является недостаточным, робот-уборщик движется к зарядной станции, чтобы питаться зарядным током. Робот-уборщик дополнительно содержит блок обнаружения батареи (не показан), сконфигурированный, чтобы воспринимать заряженное состояние батареи и передавать обнаруженную информацию блоку 140 управления. Оставшееся количество питания батареи может быть отображено на экране блока вывода. Блок 140 управления предварительно устанавливает опорное значение (по оставшейся емкости батареи) и сравнивает оставшуюся емкость батареи с опорным значением. Если оставшаяся емкость батареи меньше, чем опорное значение, как результат сравнения, блок 140 управления перемещает робота-уборщика к зарядной станции для зарядки.
Обращаясь к фиг. 4, робот-уборщик может дополнительно содержать блок 170 хранения, сконфигурированный, чтобы хранить в себе по меньшей мере одну из информации изображения, информации о препятствии, информации о положении, карты уборки и области уборки. Блок 170 хранения сконфигурирован, чтобы хранить в себе управляющую программу для управления роботом-уборщиком и данные, связанные с управляющей программой. Блок 170 хранения может дополнительно хранить в себе тип уборки и тип передвижения. В качестве блока 170 управления, главным образом, используется энергонезависимая память (NVM, NVRAM). NVM указывает устройство хранения, способное поддерживать сохраненную информацию, даже если питание не подается к ней. NVM включает в себя ROM, флэш-память, магнитное компьютерное запоминающее устройство (например, жесткий диск, накопитель на дискетах и магнитную ленту), оптический накопитель, магнитное RAM, PRAM и т.д.
Блок 170 хранения может дополнительно хранить в себе модель звука события относительно звука события и модель звука окружающей среды относительно звука окружающей среды. Такие модели могут быть сохранены в части хранения, предусмотренной в блоке распознавания звука или блока управления. Модель звука события и модель звука окружающей среды могут быть реализованы в форме GMM (гауссовой смешанной модели).
Блок 120 распознавания звука может включать в себя первую часть 121 распознавания, сконфигурированную, чтобы распознавать звуковое окружение с интервалами первого времени и распознавать звук события на основе модели звука события; вторую часть 122 распознавания, сконфигурированную, чтобы распознавать звуковое окружение с интервалами первого времени и распознавать звук окружающей среды на основе модели звука окружающей среды; и третью часть 123 распознавания, сконфигурированную чтобы распознавать звуковое окружение с интервалами второго времени, более длительного, чем первое время, и распознавать звук окружающей среды на основе модели звука окружающей среды. Распознавание звука выполняется посредством сопоставления звука с моделью звука окружающей среды и моделью звука события, каждая модель предварительно сохранена в форме данных. Такое моделирование может быть выполнено различными способами. Однако предпочтительно использовать НММ (скрытую марковскую модель) и GMM.
Первое и второе время предварительно установлены, причем они могут быть определены посредством экспериментов согласно типу звука и т.д. Звук окружающей среды предпочтительно распознается посредством анализа данных дольше, чем второе время. Однако звук события предпочтительно распознается с интервалами первого времени, поскольку звук события генерируется, чтобы исчезать в течение очень короткого времени. Например, первое время может быть установлено как 0,3 с, 0,5 с и т.д., а второе время может быть установлено как 1 с, 3 с и т.д.
Блок 120 распознавания звука может обновлять модель звука события на основе (или с помощью) звука окружающей среды, распознанного посредством третьей части распознавания. Т.е. робот-уборщик адаптируется к обстановке. В результате, точность распознавания звука события улучшается. В отличие от экспериментальной обстановки, в фактической обстановке, где характерный звук события и звук окружающей среды смешиваются друг с другом, трудно распознавать звук события и звук окружающей среды способом разделения. Для улучшенной точности распознавания генерируется модель звука события, адаптируемая к данной обстановке. Например, для того, чтобы более точно распознавать звук события, происходящий в шумной обстановке, текущий звук окружающей среды добавляется к ранее обученной модели. Здесь, используется способ вычисления значения среднего отклонения (среднее отклонение) звука окружающей среды и затем адаптации вычисленного значения к существующей модели, что включает в себя алгоритм адаптации, такой как ML (максимальное правдоподобие), MAP (максимум апостериори) и MLLR (линейная регрессия максимального правдоподобия).
Обращаясь снова к фиг. 3, блок 120 распознавания звука дополнительно включает в себя часть 124 определения достоверности, сконфигурированную, чтобы определять достоверность результата распознавания, полученного посредством первой части распознавания, на основе результата распознавания, полученного посредством второй части распознавания, а также результата распознавания, полученного посредством первой части распознавания. Т.е. часть 124 определения достоверности сконфигурирована, чтобы определять достоверность, приводя в действие часть распознавания звука окружающей среды и часть распознавания звука события параллельно и позволяя двум частям распознавания обмениваться информацией друг с другом.
Часть 124 определения достоверности сравнивает шанс (правдоподобие, возможность или вероятность) первого звука события, имеющего наивысшее правдоподобие (или шанс) среди результатов распознавания, полученных посредством первой части распознавания, с правдоподобием (или шансом) первого звука окружающей среды, имеющего наивысшее правдоподобие (или шанс) среди результатов распознавания, полученных посредством второй части распознавания. Если правдоподобие (или шанс) первого звука события больше, чем правдоподобие первого звука окружающей среды, в результате сравнения, часть 124 определения достоверности выводит первый звук события. Правдоподобие (или шанс) указывает правдоподобие соответствующего звука, что является типом вероятности. Для того, чтобы распознавать звук события, первая часть распознавания и вторая часть распознавания параллельно распознают звуки с интервалами первого времени. Первая часть 121 распознавания и вторая часть 122 распознавания выполняют первичное отклонение, когда каждый результат распознавания меньше, чем предварительно установленное опорное значение. Т.е. первая часть 121 распознавания и вторая часть 122 распознавания предотвращают неправильное распознавание за счет отклонения. Если правдоподобие звука события, полученное первым блоком распознавания, меньше, чем правдоподобие звука окружающей среды, полученное вторым блоком распознавания, робот-уборщик выполняет отклонение. В этом случае определяется, что характерный звук события не возник.
Если различие между первым звуком события, имеющим наивысшее правдоподобие (или шанс), и вторым звуком события, имеющим второе наивысшее правдоподобие (или шанс), больше, чем опорное значение, часть 124 определения достоверности выводит первый звук события. Если правдоподобие (или шанс) первого звука события, имеющего наивысшее правдоподобие (или шанс), больше, чем правдоподобие первого звука окружающей среды, имеющего наивысшее правдоподобие (или шанс), часть 124 определения достоверности сравнивает правдоподобие (или шанс) первого звука события с правдоподобием (или шансом) второго звука события. Если различие между правдоподобием (или шансом) первого звука события и правдоподобием (или шансом) второго звука события больше, чем опорное значение, блок 120 распознавания звука определяет, что возник звук события. Напротив, если различие между правдоподобием (или шансом) первого звука события и правдоподобием (или шансом) второго звука события меньше, чем опорное значение, робот-уборщик выполняет отклонение.
Обращаясь к фиг. 3 снова, блок 120 распознавания звука дополнительно включает в себя часть 125 извлечения признаков, сконфигурированную, чтобы извлекать вектор признаков, из звукового окружения, на основе (или с помощью) технологии обработки звука, и сконфигурированную, чтобы выводить извлеченные векторы признаков к первой-третьей частям распознавания. Технология обработки звука служит для облегчения распознавания звука посредством выполнения извлечения, усиления, фильтрации, преобразования и т.д. по отношению к звуку. В качестве технологии обработки звука может быть использована технология линейно-логарифмического преобразования.
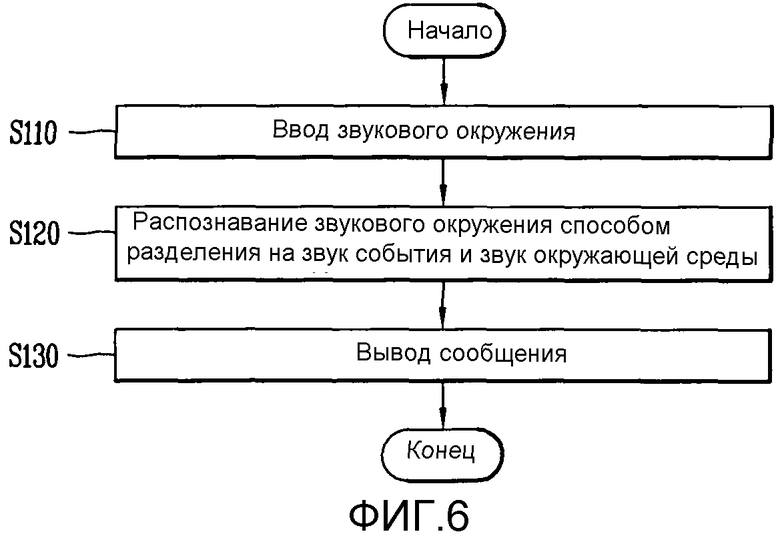
Обращаясь к фиг. 6, способ управления роботом-уборщиком согласно одному варианту осуществления содержит: прием звукового окружения на основе (или с помощью) одного или более микрофонов (S110); распознавание принятого звукового окружения способом разделения на звук события и звук окружающей среды (S120); и вывод сообщения, соответствующего звуку события или звуку окружающей среды (S130). Здесь, звук события указывает звук разбивания объекта, такого как окно, звук человека или звук животного, звук от ноги, звук падения объекта, звук взрыва, звук оружия и т.д. Звук окружающей среды указывает уникальный звук обстановки и включает в себя шум и т.д. Звук окружающей среды изменяется согласно положению, в котором робот-уборщик находится. Например, в случае жилой комнаты, где включен телевизор, звук окружающей среды включает в себя звук, издаваемый из телевизора.
Робот-уборщик принимает звуковое окружение с помощью многоканальной установки микрофонов (S110). Например, робот-уборщик включает в себя по меньшей мере три микрофона. В случае, когда робот-уборщик снабжен тремя микрофонами, как показано на фиг. 1, три микрофона расположены внутри или снаружи робота-уборщика с постоянными расстояниями друг от друга. Такая компоновка может быть определена посредством экспериментов, так что направление или положение источника звука относительно звука события может быть легко обнаружено.
Робот-уборщик выполняет формирование пучка источника звука так, что только звук от источника звука может быть принят, причем источник звука этого направления оценивается прежде всего. Т.е. робот-уборщик улучшает качество звука на основе (или с помощью) технологии разделения источника звука. Робот-уборщик распознает только определенный характерный звук события, в то же время отбрасывая звук окружающей среды или неопределенный звук (S120). Также робот-уборщик проверяет достоверность распознанного звука события.
Затем, робот-уборщик выводит распознанный звук события, положение источника звука, направление источника звука, тип звука и т.д. в форме сообщения (S130). Робот-уборщик может выводить такую информацию посредством преобразования в звук предупреждения, голосовое сообщение и т.д. с помощью динамика и т.д.
Обращаясь к фиг. 7, способ управления роботом-уборщиком согласно другому варианту осуществления содержит: прием звукового окружения с помощью одного или более микрофонов (S210); обнаружение направления или положения источника звука относительно звукового окружения (S211); распознавание принятого звукового окружения способом разделения на звук события и звук окружающей среды (S220); вывод сообщения, соответствующего звуку события или звуку окружающей среды (S230); перемещение робота-уборщика к положению источника звука (S240); и обнаружение информации изображения по положению источника звука (S250). Способ дополнительно содержит передачу, по сети связи, сообщения или информации изображения, или как сообщения, так и информации изображения (S260).
Робот-уборщик обнаруживает направление или положение источника звука относительно звука события (S211). Например, в случае наличия двух или более микрофонов робот-уборщик обнаруживает направление источника звука или положение источника звука с помощью временной разности звуков, сгенерированной от соответствующих микрофонов. Затем робот-уборщик перемещается в соответствующем направлении источника звука или к положению источника звука (S240) и обнаруживает информацию изображения, захватывая периферию с помощью камеры в соответствующем положении источника звука (S250). Робот-уборщик может определять, произошла ли ненормальная ситуация или нет, на основе последовательно обнаруживаемой информации изображения (S270). Например, робот-уборщик определяет перемещение объекта с помощью последовательно обнаруживаемой информации изображения и определяет, произошла ли кража со взломом или пожар, на основе определенного перемещения. Робот-уборщик может дополнительно выводить сигнализирующее сообщение в случае, когда произошла ненормальная ситуация.
Робот-уборщик может передавать сообщение, или информацию изображения, или и сообщение, и информацию изображения, терминальному устройству пользователя по сети связи (S280). Робот-уборщик соединен с терминальным устройством и т.д. одним из способа проводной связи, способа беспроводной связи и способа спутниковой связи, т.е. одним из доступных в настоящее время способов связи, таким образом передавая сообщение, звуковую информацию, информацию изображения и т.д. терминальному устройству и принимая сигналы управления от терминального устройства.
Обращаясь к фиг. 8, этап распознавания принятого звукового окружения (S120, S220) включает в себя извлечение векторов признаков из звукового окружения с помощью технологии обработки звука (S221); первый процесс распознавания (S222) для распознавания звука события с интервалами первого времени на основе векторов признаков и модели звука события относительно звука события; второй процесс распознавания (S223) для распознавания звука окружающей среды с интервалами первого времени на основе векторов признаков и модели звука окружающей среды относительно звука окружающей среды; третий процесс распознавания (S226) для распознавания звука окружающей среды с интервалами второго времени, более длительного, чем первое время, на основе векторов признаков и модели звука окружающей среды; и определение достоверности распознанного звука события на основе результата распознавания, полученного во втором процессе распознавания, а также результата распознавания, полученного в первом процессе распознавания (S224). Этап распознавания звукового окружения (S120, S220) дополнительно включает в себя обновление модели звука события с использованием звука окружающей среды, распознанного в третьем процессе распознавания (S228).
Робот-уборщик извлекает векторы признаков из звукового окружения с помощью технологии обработки звука (S221). Технология обработки звука служит для облегчения распознавания звука посредством выполнения извлечения, усиления, фильтрации, преобразования и т.д. по отношению к звуку. В качестве технологии обработки звука может быть использована технология линейно-логарифмического преобразования.
Робот-уборщик распознает звук события с интервалами первого времени на основе звукового окружения и модели звука события (S222). Робот-уборщик распознает звук окружающей среды с интервалами первого времени на основе звукового окружения и модели звука окружающей среды (S223). Робот-уборщик распознает звук окружающей среды с интервалами второго времени, более длительного, чем первое время, на основе звукового окружения и модели звука окружающей среды (S226). Распознавание звука выполняется посредством сопоставления звука с моделью звука окружающей среды и моделью звука события, каждая модель предварительно сохранена в форме данных. Такое моделирование может быть выполнено различными способами. Однако предпочтительно использовать HMM (скрытую марковскую модель) и GMM.
Первое и второе время предварительно установлены, причем они могут быть определены посредством экспериментов согласно типу звука и т.д. Звук окружающей среды предпочтительно распознается посредством анализа данных дольше, чем второе время. Однако звук события предпочтительно распознается с интервалами первого времени, поскольку звук события генерируется, чтобы исчезать в течение очень короткого времени. Например, первое время может быть установлено как 0,3 с, 0,5 с и т.д., а второе время может быть установлено как 1 с, 3 с и т.д.
Робот-уборщик определяет достоверность результата распознавания относительно звука события на основе результата распознавания относительно звука окружающей среды (S224). Т.е. робот-уборщик сконфигурирован, чтобы определять достоверность, посредством задействования части распознавания звука окружающей среды и часть распознавания звука события параллельно, и позволяя двум частям распознавания обмениваться информацией друг с другом. Робот-уборщик сравнивает шанс (правдоподобие, возможность или вероятность) первого звука события, имеющего наибольший шанс среди результатов распознавания, полученных в первом процессе распознавания (S222), с шансом звука окружающей среды, имеющего наибольший шанс среди результатов распознавания, полученных во втором процессе распознавания (S223). Если шанс первого звука события больше, чем шанс первого звука окружающей среды, в результате сравнения, робот-уборщик выводит первый звук события. Шанс указывает правдоподобие соответствующего звука, что является видом вероятности. Робот-уборщик выполняет первичное отклонение, когда результат распознавания, полученный посредством первого процесса распознавания, и результат распознавания, полученный посредством второго процесса распознавания, меньше, чем предварительно установленные опорные значения. Если правдоподобие звука события, полученное в первом процессе распознавания (S222), меньше правдоподобия звука окружающей среды, полученного во втором процессе распознавания (S223), робот-уборщик выполняет отклонение. В этом случае определяется, что характерный звук события не возник.
Если различие между первым звуком события, имеющим наибольший шанс, и вторым звуком события, имеющим второй наибольший шанс, больше опорного значения, робот-уборщик выводит первый звук события. Если шанс первого звука события, имеющего наибольший шанс, больше, чем шанс первого звука окружающей среды, имеющего наибольший шанс, робот-уборщик сравнивает шанс первого звука события с шансом второго звука события. Если различие между шансом первого звука события и шансом второго звука события больше, чем опорное значение, робот-уборщик определяет, что звук события произошел. Напротив, если различие между шансом первого звука события и шансом второго звука события меньше, чем опорное значение, робот-уборщик выполняет отклонение.
Робот-уборщик приспосабливается к обстановке. В результате, скорость распознавания звука события увеличивается. В отличие от экспериментальных условий, в фактических условиях, где характерный звук события и звук окружающей среды смешаны друг с другом, трудно распознавать звук события и звук окружающей среды способом разделения. Для улучшенной скорости распознавания генерируется модель звука события, адаптируемая к данным условиям. Например, для того, чтобы более точно распознавать звук события, происходящий в шумной обстановке, текущий звук окружающей среды добавляется к ранее обученной модели. Здесь, используется способ вычисления значения среднего отклонения (среднее отклонение) звука окружающей среды и затем адаптации вычисленного значения к существующей модели, что включает в себя алгоритм адаптации, такой как ML (максимальное правдоподобие), MAP (максимум апостериори) и MLLR (линейная регрессия максимального правдоподобия).
Настоящее изобретение может иметь следующие преимущества.
Во-первых, направление источника звука и положение источника звука могут быть обнаружены посредством одного или более микрофонов, например, трех микрофонов, и характерный звук события может быть распознан. Затем, распознанный характерный звук события может быть выведен к корпусу уборщика в форме сообщения или может быть предоставлен через сеть связи. Это может позволять легко наблюдать за обстановкой.
Во-вторых, функция распознавания звука может быть обновлена с помощью звукового окружения для распознавания звука из фонового шума и шума окружающей среды надежным и точным образом. Это может улучшать скорость распознавания звука и улучшать стабильность и эффективность.
В-третьих, робот-уборщик может перемещаться к обнаруженному направлению или к положению источника звука относительно звука события. Затем, информация изображения может быть обнаружена, или может быть определено, произошла или нет ненормальная ситуация. Такая информация может быть предоставлена по сети связи.
В-четвертых, в случае модели, имеющей камеру, может быть обнаружено, случился или нет звук события. Это может не допускать возникновение мертвой зоны, получающейся в результате того, что камера не может захватывать объект в диапазоне 360°.
В-пятых, 24-часовая автоматизированная функция контроля безопасности может выполняться с помощью 24-часовой службы распознавания звука.
В-шестых, настоящее изобретение может быть применено к мобильному роботу в другой области, например, роботу-охраннику для общественной безопасности, способному предоставлять услугу обеспечения безопасности для пользователя посредством наблюдения/защиты ограниченных областей независимо или способом взаимодействия с системой безопасности и посредством охраны человеческой жизни и собственности.
В-седьмых, при возникновении столкновения между транспортными средствами или столкновении между человеком и транспортным средством робот-уборщик настоящего изобретения может собирать фактические данные посредством оценки положения или направления аварии и затем посредством перемещения камеры в этом направлении. Дополнительно, робот-уборщик может применяться, чтобы не нарушать движение транспортного средства аварийной службы.
Упомянутые выше варианты осуществления и преимущества являются просто примерными и не должны толковаться как ограничивающие настоящее раскрытие. Настоящие принципы могут легко применяться к другим типам аппаратных систем. Это описание предназначено быть иллюстративным, а не предназначено ограничивать рамки формулы изобретения. Множество альтернатив, модификаций и вариаций будут очевидны специалистам в данной области техники. Признаки, структуры, способы и другие характеристики примерных вариантов осуществления, описанных в данном документе, могут быть объединены различными способами, чтобы получать дополнительные и/или альтернативные примерные варианты осуществления.
Поскольку настоящие признаки могут быть осуществлены в нескольких формах без отступления от их характеристик, необходимо также понимать, что вышеописанные варианты осуществления не ограничены какими-либо из деталей предшествующего описания, если не указано иное, а скорее должны широко рассматриваться в его рамках, как определено в прилагаемой формуле изобретения, и поэтому все изменения и модификации, которые попадают в границы и ограничения формулы изобретения, или эквиваленты таких границ и ограничений, поэтому подразумеваются как охваченные прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС | 2013 |
|
RU2560319C2 |
| РОБОТ-УБОРЩИК (ВАРИАНТЫ), РОБОТОТЕХНИЧЕСКАЯ СИСТЕМА-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ ИМИ | 2003 |
|
RU2242159C1 |
| МОДУЛЬ ОТОБРАЖЕНИЯ И СИСТЕМА ОТОБРАЖЕНИЯ | 2011 |
|
RU2568576C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ДИСПЛЕЕМ | 2014 |
|
RU2666246C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УЛАВЛИВАНИЯ ЗВУКОВ, СООТВЕТСТВУЮЩИХ ИЗОБРАЖЕНИЯМ НАБЛЮДЕНИЯ | 2015 |
|
RU2638763C2 |
| СИСТЕМА, СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВЛИЯНИЯ СВЕТА И ЗВУКА НА ЧЕЛОВЕКА | 2014 |
|
RU2667615C2 |
| МОБИЛЬНОЕ ОБНАРУЖЕНИЕ ОРУЖЕЙНОГО ВЫСТРЕЛА | 2014 |
|
RU2679338C2 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ УБОРКИ, РОБОТ-УБОРЩИК И СПОСОБ УПРАВЛЕНИЯ РОБОТОМ-УБОРЩИКОМ | 2014 |
|
RU2620236C1 |
| АУДИОПОМОЩЬ В НАВИГАЦИИ | 2015 |
|
RU2678361C1 |
| Образовательно-исследовательский комплекс робот малый антропоморфный | 2019 |
|
RU2718513C1 |




Раскрываются робот-уборщик и способ управления таковым.
Во-первых, направление источника звука и положение источника звука могут быть обнаружены посредством одного или более микрофонов, например, трех микрофонов, и характерный звук события может быть распознан. Затем распознанный характерный звук события может быть выведен к корпусу уборщика в форме сообщения или может быть предоставлен через сеть связи. Это может позволять легко наблюдать за обстановкой.
Во-вторых, функция распознавания звука может быть обновлена с помощью звукового окружения для распознавания звука из фонового шума и шума окружающей среды надежным и точным образом. Это может улучшать скорость распознавания звука и улучшать устойчивость и эффективность.
В-третьих, робот-уборщик может перемещаться в обнаруженном направлении или к положению источника звука относительно звука события. Затем информация изображения может быть обнаружена, или может быть определено, произошла или нет ненормальная ситуация. Такая информация может быть предоставлена по сети связи. 3 н. и 17 з.п. ф-лы, 8 ил.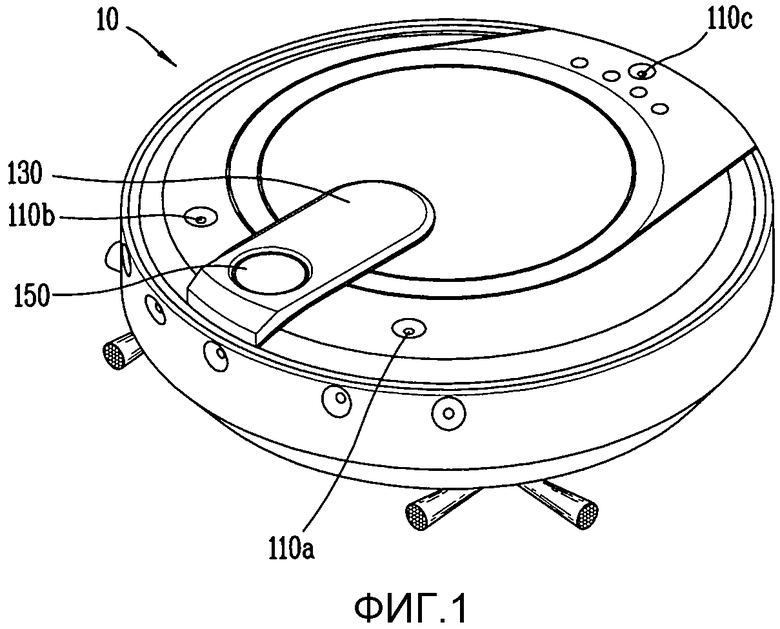
1. Робот-уборщик, содержащий:
блок ввода звука, имеющий один или более микрофонов и сконфигурированный, чтобы принимать звуковое окружение;
блок распознавания звука, сконфигурированный, чтобы распознавать принятое звуковое окружение способом разделения на звук события и звук окружающей среды;
блок вывода сообщения, сконфигурированный, чтобы выводить сообщение, соответствующее звуку события или звуку окружающей среды; и
блок хранения, сконфигурированный, чтобы сохранять модель звука события относительно звука события и модель звука окружающей среды относительно звука окружающей среды;
при этом блок распознавания звука сконфигурирован, чтобы:
распознавать звук звукового окружения, который согласуется с моделью звука события, в качестве звука события; и
распознавать звук звукового окружения, который согласуется с моделью звука окружающей среды, в качестве звука окружающей среды.
2. Робот-уборщик по п.1, дополнительно содержащий блок управления, сконфигурированный, чтобы обнаруживать направление или положение источника звука относительно звука события.
3. Робот-уборщик по п.2, в котором блок ввода звука включает в себя по меньшей мере три микрофона, и
при этом упомянутые по меньшей мере три микрофона расположены внутри или снаружи робота-уборщика с постоянными расстояниями друг от друга.
4. Робот-уборщик по п.2, дополнительно содержащий блок обнаружения изображения, сконфигурированный, чтобы обнаруживать информацию изображения, захватывая периферию положения источника звука.
5. Робот-уборщик по п.4, дополнительно содержащий блок связи, сконфигурированный, чтобы передавать, через сеть связи, сообщение или информацию изображения, или как сообщение, так и информацию изображения.
6. Робот-уборщик по п.1, в котором блок распознавания звука включает в себя:
первую часть распознавания, сконфигурированную, чтобы распознавать звук события с интервалами первого времени на основе звукового окружения и модели звука события; вторую часть распознавания, сконфигурированную, чтобы распознавать звук окружающей среды с интервалами первого времени на основе звукового окружения и модели звука окружающей среды; и
третью часть распознавания, сконфигурированную, чтобы распознавать звук окружающей среды с интервалами второго времени, более длительного, чем первое время, на основе звукового окружения и модели звука окружающей среды.
7. Робот-уборщик по п.6, в котором блок распознавания звука обновляет модель звука события на основе звука окружающей среды, распознанного посредством третьей части распознавания.
8. Робот-уборщик по п.6, в котором блок распознавания звука дополнительно включает в себя часть определения достоверности, сконфигурированную, чтобы определять достоверность по результату распознавания, полученному посредством первой части распознавания, на основе результата распознавания, полученного посредством второй части распознавания, а также результата распознавания, полученного посредством первой части распознавания.
9. Робот-уборщик по п.8, в котором часть определения достоверности сравнивает правдоподобие первого звука события, имеющего наибольшее правдоподобие среди результатов распознавания, полученных посредством первой части распознавания, с правдоподобием первого звука окружающей среды, имеющего наибольшее правдоподобие среди результатов распознавания, полученных посредством второй части распознавания, и
при этом, если правдоподобие первого звука события больше, чем правдоподобие первого звука окружающей среды, в результате сравнения, часть определения достоверности выводит первый звук события.
10. Робот-уборщик по п.9, в котором, если различие между первым звуком события, имеющим наибольшее правдоподобие, и вторым звуком события, имеющим второе наибольшее правдоподобие, больше, чем опорное значение, часть определения достоверности выводит первый звук события.
11. Робот-уборщик по п.6, в котором блок распознавания звука дополнительно включает в себя часть извлечения признаков, сконфигурированную, чтобы извлекать векторы признаков из звукового окружения на основе технологии обработки звука, и сконфигурированную, чтобы выводить извлеченные векторы признаков к первой-третьей частям распознавания.
12. Робот-уборщик, содержащий:
корпус уборщика;
приводной блок, имеющий колесный электромотор для приведения в движение одного или более колес, установленных в нижней части корпуса уборщика, и сконфигурированный, чтобы перемещать корпус уборщика согласно управляющему сигналу;
блок очистки, имеющий всасывающий электромотор для всасывания воздуха, имеющий средство сбора пыли и сконфигурированный, чтобы всасывать посторонние материалы;
блок ввода звука, имеющий один или более микрофонов внутри или снаружи корпуса уборщика и сконфигурированный, чтобы принимать звуковое окружение;
блок распознавания звука, сконфигурированный, чтобы распознавать принятое звуковое окружение способом разделения на звук события и звук окружающей среды;
блок управления, сконфигурированный, чтобы обнаруживать направление или положение источника звука относительно звука события, и сконфигурированный, чтобы генерировать управляющий сигнал; и
блок хранения, сконфигурированный, чтобы сохранять модель звука события относительно звука события и модель звука окружающей среды относительно звука окружающей среды;
при этом блок распознавания звука сконфигурирован, чтобы:
распознавать звук звукового окружения, который согласуется с моделью звука события, в качестве звука события; и
распознавать звук звукового окружения, который согласуется с моделью звука окружающей среды, в качестве звука окружающей среды.
13. Робот-уборщик по п.12, в котором блок распознавания звука включает в себя:
первую часть распознавания, сконфигурированную, чтобы распознавать звук события с интервалами первого времени на основе звукового окружения и модели звука события относительно звука события;
вторую часть распознавания, сконфигурированную, чтобы распознавать звук окружающей среды с интервалами первого времени на основе звукового окружения и модели звука окружающей среды относительно звука окружающей среды; и
третью часть распознавания, сконфигурированную, чтобы распознавать звук окружающей среды с интервалами второго времени, более длительного, чем первое время, на основе звукового окружения и модели звука окружающей среды.
14. Робот-уборщик по п.13, в котором блок распознавания звука обновляет модель звука события на основе звука окружающей среды, распознанного посредством третьей части распознавания.
15. Робот-уборщик по п.13, в котором блок распознавания звука дополнительно включает в себя часть определения достоверности, сконфигурированную, чтобы определять достоверность по результату распознавания, полученному посредством первой части распознавания, на основе результата распознавания, полученного посредством второй части распознавания, а также результата распознавания, полученного посредством первой части распознавания.
16. Робот-уборщик по п.13, в котором блок распознавания звука дополнительно включает в себя часть извлечения признаков, сконфигурированную, чтобы извлекать векторы признаков из звукового окружения на основе технологии линейно-логарифмического преобразования, и сконфигурированную, чтобы выводить извлеченные векторы признаков к первой-третьей частям распознавания.
17. Способ управления роботом-уборщиком, содержащий этапы, на которых:
принимают звуковое окружение на основе одного или более микрофонов;
распознают принятое звуковое окружение способом разделения на звук события и звук окружающей среды; и
выводят сообщение, соответствующее звуку события или звукам окружающей среды;
при этом этап распознавания принятого звукового окружения включает в себя этапы, на которых:
распознают звук звукового окружения, который согласуется с моделью звука события, в качестве звука события; и
распознают звук звукового окружения, который согласуется с моделью звука окружающей среды, в качестве звука окружающей среды.
18. Способ по п.17, дополнительно содержащий этапы, на которых:
обнаруживают направление или положение источника звука относительно звука события;
перемещают робота-уборщика к положению источника звука; и
обнаруживают информацию изображения по положению источника звука.
19. Способ по п.17, этап распознавания принятого звукового окружения включает в себя:
извлечение векторов признаков из звукового окружения на основе технологии обработки звука;
первый процесс распознавания для распознавания звука события с интервалами первого времени на основе векторов признаков и модели звука события относительно звука события;
второй процесс распознавания для распознавания звука окружающей среды с интервалами первого времени на основе векторов признаков и модели звука окружающей среды относительно звука окружающей среды;
третий процесс распознавания для распознавания звука окружающей среды с интервалами второго времени, более длительного, чем первое время, на основе векторов признаков и модели звука окружающей среды; и
определяют достоверность по распознанному звуку события на основе результата распознавания, полученного во втором процессе распознавания, а также результата распознавания, полученного в первом процессе распознавания.
20. Способ по п.19, в котором этап распознавания принятого звукового окружения дополнительно включает в себя этап, на котором обновляют модель звука события на основе звука окружающей среды, распознанного в третьем процессе распознавания.
| US 20040034533 A1,19.02.2004 | |||
| CN101084817 A, 12.12.2007 | |||
| CN101234012 A, 06.08.2008 | |||
| JP2007122327 A, 17.05.2007 | |||
| KR20060127453 A, 13.12.2006 |

