Техническое решение относится к области робототехники, а именно к образовательно-исследовательским комплексам, более точно к образовательно-исследовательскому комплексу робот малый антропоморфный (далее РОМА), предназначенному для профессионального обучения школьников и студентов программированию, конструированию, информационным технологиям и робототехнике, повышения квалификации специалистов с использованием в качестве инструмента обучения (интерактивного учебного пособия) заявленного образовательно-исследовательского комплекса робот малый антропоморфный (РОМА). Основным предназначением заявленного технического решения является проведение лабораторных и исследовательских работ, демонстрации навыков, приобретенных в процессе обучения обучаемых в сфере программирования, конструирования, информационных технологий и робототехники, и также проверка полученных обучаемыми практических навыков и знаний в указанных сферах практической деятельности.
В настоящее время на рынке робототехнических технологий отсутствуют динамические модели-тренажеры, позволяющие обучающимся изучать конструктивные особенности роботов и робототехнических систем, программировать множественные комбинации команд, так как имеющиеся в наличии на дату представления заявочных материалов робототехнические модели тренажёров предназначены преимущественно для узких областей использования, например, только для изучения технического зрения, только для изучения тактильной сенсорики, только для изучения языков программирования и т.д.
При этом такой ограниченный круг функциональных возможностей препятствует обучению специалистов в области робототехники всему необходимому спектру возможностей технических систем как таковых и, как следствие, значительно ограничивает возможности привития теоретических и практических навыков обучающихся, что не соответствует требованиям по обучению высококомпетентных и квалифицированных специалистов во многих областях науки и техники.
Далее заявителем выполнен анализ выявленных из исследованного уровня техники аналогов в исследуемой области техники.
Из исследованного заявителем уровня техники выявлена система управления антропоморфным роботом по патенту на полезную модель RU №124623, сущностью является система управления антропоморфным роботом, содержащая систему технического зрения, подключенная к входу компьютера и микроконтроллер, соединенный с компьютером, приводами робота и выходами тактильных датчиков, отличающаяся тем, что в нее дополнительно введены контактные и бесконтактные датчики сбоев, установленные соответственно на линиях связи и интерфейсных шинах или в непосредственной близости до 1-2 см от линии связи или интерфейсной шины для обнаружения внутренних и внешних электромагнитных помех от источников сбоев в виде соединителей/разъемов, интерфейсных шин, шин управления, заземления и электропитания, при этом система выполнена с возможностью алгоритмической обработки сигналов с упомянутых датчиков сбоев.
Недостатком известной системы является невозможность использования данной системы управления в обучении ввиду отсутствия ключевых подсистем для программирования, в том числе интерфейса взаимодействия с обучаемым-пользователем.
Известен антропоморфный робот учебного процесса по патенту на полезную модель RU №153699, сущностью является антропоморфный робот учебного процесса, содержащий интерфейс взаимодействия, компьютер, телекамеру, датчик перемещения и устройство обработки видеосигнала, информационно связанные с компьютером, отличающийся тем, что устройство обработки видеосигнала выполнено в виде блока формирования контурного изображения предмета и блока расчета перемещения робота, вход которого связан с датчиком перемещения, компьютер снабжен средством сравнения и выполнен с возможностью управления роботом с использованием программного приложения, созданного в ходе учебного процесса и загружаемого через интерфейс взаимодействия для обеспечения поиска предмета, заданного к поиску, а средство сравнения информационно связано с блоком формирования контурного изображения и выполнено с возможностью сравнения контурного изображения, сформированного блоком формирования контурного изображения с контурным изображением предмета, заданного к поиску.
Недостатком известного робота является функциональная ограниченность. Он способен выполнять только программу поиска предметов по их контурному изображению. Таким образом, с его помощью невозможно в полной степени проводить обучение по всему спектру возможностей робототехнических комплексов.
Известен антропоморфный мобильный робот по патенту на полезную модель RU №151795, сущностью является антропоморфный мобильный робот, содержащий устройство перемещения, тактильные датчики, выходы которых связаны с компьютером, размещенным в корпусе робота, узел технического зрения, связанный с компьютером и состоящий из по крайней мере одной телекамеры, установленной на голове робота, и связанного с видеовыходом телекамеры устройства обработки видеосигналов, отличающийся тем, что он снабжен датчиком перемещения, а устройство обработки видеосигналов выполнено в виде блока формирования контурного изображения, связанного с видеовыходом телекамеры, и блока расчета перемещения, вход которого связан с датчиком перемещения, причем блок формирования контурного изображения выполнен в виде блока пространственного дифференцирования видеосигнала и сравнения результата дифференцирования с пороговым значением.
Недостатком известного технического решения является отсутствие возможности голосового управления роботом, воспроизведения им речи, а также отсутствие возможности определения положения туловища робота в пространстве, которое возможно регулировать за счёт удаленного воздействия посредством устройства управления. Указанный недостаток в некоторой степени нивелируется за счет системы технического зрения, однако данный подход усложняет систему и недостаточен для процесса обучения программированию в более широком объёме.
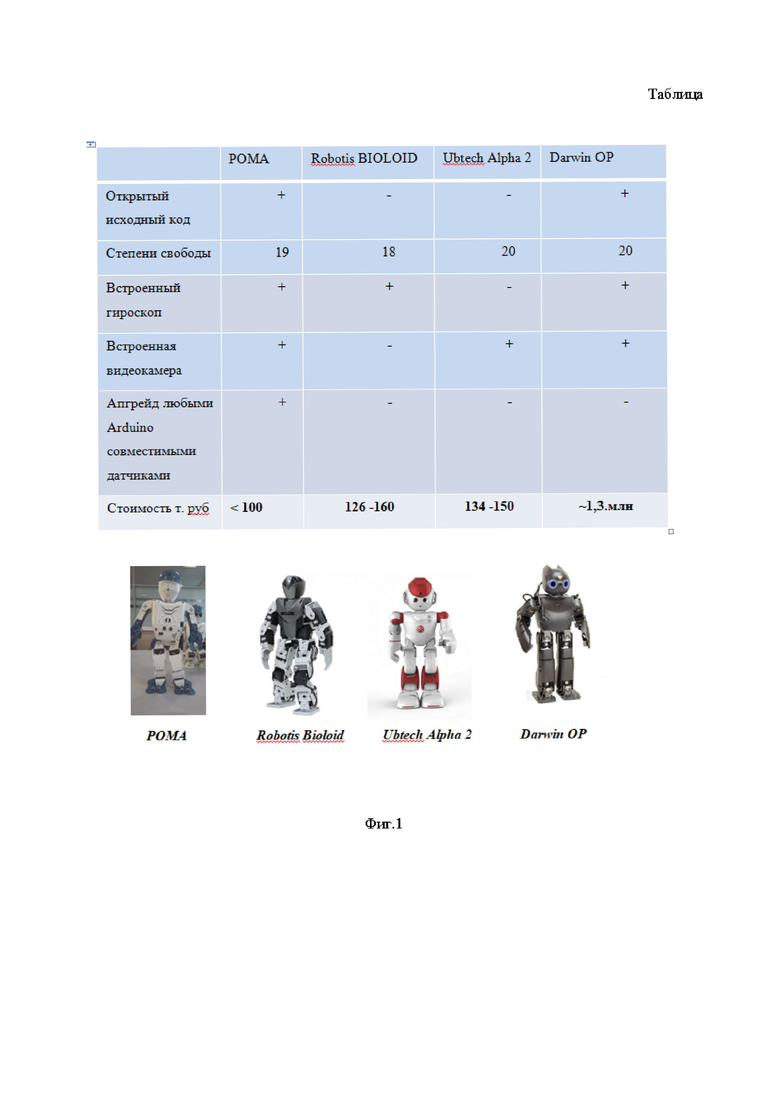
Задачей заявленного технического решения является устранение недостатков прототипа и создание более конкурентоспособной модели, позволяющей повысить уровень теоретических, практических знаний, привитие навыков и приемов практического применения полученных знаний при обучении в образовательных учреждениях, а также импортозамещение в силу того, что аналогичные системы зарубежного производства, таких фирма как Robotis (BIOLOID) [https://robotbaza.ru/product/bioloid-premium-kit], Ubtech Alpha 2 [https://nanojam.ru/products/ubtech-alpha-2], Darwin OP [http://robotgeeks.ru/collection/darwin], имеют ряд характеристик, препятствующих широкому применению в образовательных учреждениях РФ.
Базовые характеристики импортных малых антропоморфных роботов более подробно представлены в таблице на Фиг. 1.
Сравнительный анализ, произведенный по основным техническим характеристикам представленных на Фиг.1 роботов, позволяет сделать вывод о том, что:
- робот Darwin OP корейской фирмы Robotis по техническим характеристикам является наиболее близким к заявляемой модели, однако стоимость робота составляет 1,3 миллиона рублей и выше, что является препятствием для широкого использования в качестве учебного пособия в образовательных учреждениях РФ, указанные недостатки характерны известному роботу вследствие того, что робот по своей сути не является разборным, в силу чего он не обеспечивает возможность выполнения с ним манипуляций, которые требуются в процессе обучения студентов основам робототехники, программирования, его разборки, сборки, проверки работоспособности при внесении каких либо поломок для привития навыков ремонта. Высокая стоимость робота (стоимостью порядка 1 млн.300000 руб.) и его составных частей влечет за собой трепетное отношение при эксплуатации, не позволяющее в полной мере дать возможность студентам привить навыки работы с различными подсистемами робототехнических систем.
- робот Ubtech Alpha 2 является по сути игрушкой для детей домашнего применения и задуман производителем как “друг-игрушка” для ребенка. Заложенные производителем характеристики и технические возможности не подлежат модификации, конструкция имеет законченный вид, у конструкции нет возможности изучать отдельные подсистемы робототехнических систем (техническое зрение, синтез и анализ речи и т.д.), поэтому данный робот не может быть в принципе использован в качестве учебного пособия для учебных учреждений
- робот BIOLOID корейской фирмы Robotis по ценовым параметрам и по техническим характеристикам является наиболее близкой к заявленному техническому решению, однако в нем отсутствует видеокамера - одна из важнейших компонент робототехнических систем, таких например как техническое зрение, что ограничивает использование данного робота в образовательном процессе, кроме того отсутствует возможность модифицировать программное обеспечение, что так же ограничивает область использования данной модели в образовательном процессе
Широкое применение в РФ получили наборы LEGO для обучения основам робототехники [https://www.lego.com/ru-ru/mindstorms].
Недостатками этих наборов является то, что они:
- предназначены для детей школьного возраста, при этом предназначены для обучения только ОСНОВАМ робототехники и не пригодны для преподавания в высших учебных заведениях (изучение технического зрения, систем анализа и синтеза речи и т.д.),
- используют программное обеспечение, не предполагающее модификацию и дополнение,
- используют только свой ограниченный набор датчиков и сенсоров, что ограничивает данные наборы в использовании,
- не содержат видеокамеру - одну из важнейших компонент робототехнических систем, таких, например как техническое зрение, что ограничивает использование данного робота в образовательном процессе.
При этом заявитель обращает внимание на то, что информация о наличии патентной защиты наборов LEGO из исследованного уровня техники не выявлена.
Из исследованного уровня техники выявлено изобретение по патенту CN107186732. Сущностью известного технического решения является антропоморфный робот для развлечения детей, антропоморфный робот, содержащий торс и голову, причем голова снабжена системой взаимодействия человека с компьютером; и дно туловища снабжено приводным механизмом для приведения в движение туловища. Верхняя часть туловища подвижно соединена с головкой вращающимся механизмом; туловище и / или голова снабжены системой позиционирования источника звука, и приводной механизм заставляет туловище двигаться, когда система позиционирования источника звука фиксирует положение источника звука. Положение источника звука, вращающийся механизм приводит головку во вращение к системе взаимодействия человека с машиной, стоящей перед источником звука. Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с машиной содержит модуль управления взаимодействием, модуль отображения, модуль воспроизведения звука, модуль сбора звука, модуль хранения и модуль связи, а также дисплей. модуль, модуль воспроизведения звука, модуль сбора звука, модуль хранения и модуль связи соответственно электрически соединены с интерактивным модулем управления. Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит интеллектуальный чат-блок. Антропоморфный робот для развлечения детей по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит блок связи родитель-ребенок. Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит блок «сказка по требованию». Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит блок обмена радостью. Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит блок домашнего мониторинга. Антропоморфный робот для развлечения детей по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит блок тренировки умственного развития. Антропоморфный робот для детских развлечений по п.1, в котором система взаимодействия человека с компьютером дополнительно содержит датчик препятствия, и датчик препятствия соединен с модулем управления взаимодействием. Антропоморфный робот для детских развлечений по любому из пп.1-9, отличающийся тем, что интерактивный модуль управления представляет собой однокристальный микрокомпьютер.
При этом объем патентных притязаний представленный в первом независимом пункте формулы изобретения представлен далее: Антропоморфный робот для развлечения детей, содержащий туловище и голову, голова снабжена интерактивной системой взаимодействия человека с компьютером; нижняя часть туловища снабжена приводным механизмом для движения туловища, верхняя часть туловища подвижно соединена с головой вращающимся механизмом; туловище и/или голова снабжены системой обнаружения и позиционирования источника звука, а приводной механизм приводит в движение туловище, чтобы повернуться, когда система позиционирования источника звука определит направление к источнику звука, механизм вращения приводит в движение голову для поворота к источнику звука.
Недостатком известного технического решения является то, что:
- оно по функциональному назначению является игрушкой и предназначено для развлечения детей,
- оно не предназначено для обучения, т.к. является законченным устройством, не подлежащим модификации,
- отсутствует возможность модифицировать программное обеспечение робота вследствие того, что исходный код программного обеспечения не прилагается, что исключает расширение функциональных возможностей,
- отсутствует принципиальная возможность модифицировать существующие и добавлять новые функциональные возможности робота в зависимости от требований целей преподавания путем использования дополнительных сенсоров, датчиков и т.д. в силу исключения.
Из исследованного уровня техники выявлена группа изобретений по патенту на РФ №2361726 «Система управления антропоморфным роботом и способ управления». Сущностью является система управления антропоморфным роботом, состоящим из корпуса с манипуляторами и кистями и приводов, отличающаяся тем, что она снабжена системой технического зрения, включающей не менее одной телекамеры и блок обработки видеосигналов, микроконтроллером, выходы которого соединены с приводами робота, дистанционным пультом управления, тактильными датчиками, световым маячком и компьютером с установленными на нем тремя предварительно обученными нейронными сетями, при этом тактильные датчики установлены на внутренних поверхностях ладоней и пальцев кистей робота и соединены с входами микроконтроллера, а световой маячок размещен на указательном пальце одной из кистей. Система по п.1, отличающаяся тем, что каждый тактильный датчик выполнен в виде двух чувствительных элементов, разделенных пружиной, причем жесткость пружины подобрана с учетом оптимальной степени сжатия для набора объектов, которыми манипулирует робот. Способ управления антропоморфным роботом, содержащим корпус с манипуляторами и кистями и приводы, отличающийся тем, что используют систему управления по п.1, определяют положение робота, осуществляют подачу управляющих сигналов на микроконтроллер и включают приводы робота после получения сигналов с микроконтроллера, осуществляют предварительное обучение нейронных сетей на выполнение задач, связанных с захватом и удержанием роботом объектов различной формы и веса и формируют конечную выборку изображений взаимного расположения робота и объекта и соответствующих им значений углов поворота корпуса, манипуляторов и кистей робота, а также степеней сгибания пальцев и степеней искривления ладоней, причем в качестве входных обучающих сигналов для первой нейронной сети используют полученные от системы технического зрения изображения расположения объекта, находящегося в зоне захвата, относительно корпуса и манипуляторов робота, а в качестве выходных сигналов используют угол α поворота корпуса относительно горизонтальной оси симметрии робота, угол β наклона корпуса по отношению к вертикальной оси, угол γ между плечевой частью манипулятора и корпусом и угол δ между плечевой и локтевой частями манипуляторов, в качестве входных обучающих сигналов для второй нейронной сети используют полученные от системы технического зрения изображения расположения объекта относительно светового маячка, а в качестве выходных сигналов используют корректирующие добавки α1, β1, γ1, δ1 к углам α, β, γ, δ, в качестве входных обучающих сигналов для третьей нейронной сети используют полученные от системы технического зрения изображения формы объекта, а в качестве выходных сигналов используют угол ε поворота плоскости кистей, степени сгибания пальцев и степени искривления плоскости ладоней кистей, затем после постановки задачи последовательно первой нейронной сетью выдают микроконтроллеру значения углов α, β, γ, δ, необходимых для достижения касания объекта кистями робота, второй нейронной сетью выдают микроконтроллеру корректирующие добавки α1, β1, γ1, β1 к значениям углов α, β, γ, δ, пока на микроконтроллер не поступит сигнал хотя бы с одного тактильного датчика, при поступлении на микроконтроллер сигналов более чем 70% тактильных датчиков третьей нейронной сетью выдают микроконтроллеру значения угла ε, степени сгибания пальцев и степени искривления плоскости ладоней кистей. Способ по п.3, отличающийся тем, что корректировку углов (α+α1), (β+β1), (γ+γ1), (δ+δ1), (ε+ε1) на малые значения α2, β2, γ2, δ2, ε2 осуществляют в соответствии с алгоритмом «случайного поиска».
Недостатком известного технического решения в целом является ограниченность использования робота в качестве учебного пособия вследствие того, что в известной конструкции сделан упор только на обнаружение и захват предмета за счет использования манипулятора, оснащенного тактильными датчиками, располагаемыми на поверхностях кистей робота, что ограничивает возможности обучения учащихся по всем возможным спектрам обучения в указанной области.
В силу указанного, известное техническое решение не обладает теми функциональными возможностями, которыми обладает заявленное техническое решение, а именно:
- ограничена область применения при обучении - известное техническое решение предназначено исключительно для изучения основ технического зрения, что ограничивает область его использования,
- известная модель не является автономной - вычисления и принятие решений происходит на удаленном компьютере с установленными на нем тремя предварительно обученными нейронными сетями, что ограничивает возможность использования при обучении робототехнике по всему спектру возможностей мобильных автономных роботов, например распознавание и синтез речи, распознавание и обход препятствий изучение основ устойчивости антропоморфных роботов с применением гироскопов и т.д.
- отсутствует возможность решать задачи универсального характера, а именно, кроме как обнаруживать предметы и брать их, робот не способен на решение других задач, которые ставятся учебной программой для обучающихся.
Наиболее близким аналогом, принятым заявителем в качестве прототипа как по количеству совпадающих признаков, так и по назначению, является источник СИРАЗЕТДИНОВ Р.Т. и др., Новые технологии образования на основе малоразмерного антропоморфного робота РОМА, Информация и образование, Москва, Информация и образование, 1 (300), февраль, 2019, с.33-36. Сущностью прототипа является робот, созданный на базе двух контроллеров Raspberry PI model B + и Arduino Mega 2560 и предназначенный для использования в образовательном процессе при обучении достаточно широкого круга дисциплин и для обучающихся разного возраста.
Прототип имеет следующие характеристики:
• Рост, мм: 394.
• Вес, кг: 2.7.
• Зрение: Камера – 1 шт. (Распознавание образов, передача видеоизображения посредством WiFi с камеры на смартфон в режиме On-line).
• Слух: Датчики звука - 2 шт., распознавание команд - микрофон – 1 шт.
• Голос: Голосовой модуль DFPlayer.
• Динамик - 1 шт.
• Движение и ориентация: Гироскоп + акселерометр + компас (IMU модуль).
• Bluetooth-модуль для управления роботом с помощью смартфона.
• Ультразвуковой модуль для измерения расстояния - 3 шт. (2 шт. в ступнях, 1 шт. в туловище).
• Контроллеры: Arduino Mega 2560 (Микроконтроллер ATmega2560), микрокомпьютер Raspberry PI3 model B+.
• Сервоприводы: 19 шт. (5 степеней свободы для каждой ноги, 4 степени в руке и 1 для головы).
Дошкольникам и школьникам младших классов робот может демонстрировать слайды на экран с помощью проектора и озвучивать заранее заданный текст. Для этого проектор непосредственно подключается к HDMI-разъему робота. При этом робот может выполнять какие-либо забавные движения. Робот может быть использован во время физкультпаузы.
Также он может оказаться очень интересным объектом на уроках труда и технологии, либо в кружках дополнительного образования, когда можно учиться самостоятельно разбирать, собирать, подключать и запускать робота. В рамках тех же предметов можно изучать основы 3D-моделирования, разрабатывать собственные элементы конструкции робота, например, схваты, распечатывать их на 3D-принтере и добавлять к роботу. Можно даже создавать свой собственный дизайн робота.
Одним из наиболее широких применений робота в образовании является обучение программированию. Младшие школьники могут учиться программировать с использованием визуализированного языка на подобии ScratchDuino. Требуемая последовательность действий робота составляется из типовых блоков, а затем робот выполняет эти действия в соответствии с заданной программой.
Для более старших школьников, а также студентов, имеется возможность программировать непосредственно сам контроллер Ардуино. При этом обучающийся познает азы алгоритмизации. Сначала он программирует те или иные действия отдельных сервоприводов робота, и робот сразу отрабатывает заданную программу. Т.е. непосредственно визуализируется выполнение программного кода. Освоив управление приводами, можно учиться программировать более сложные действия робота, учиться получать и обрабатывать информацию с датчиков. Далее осваиваются принципы объектного программирования, когда учащийся работает не с абстрактными объектами, а непосредственно с элементами робота, которые в программе представляются как объекты некоторых классов.
Более сложное программирование, интеллектуальные алгоритмы, методы распознавания образов и т.п. можно осваивать с использованием встроенного в робота микрокомпьютера Raspberry PI. При этом во время разработки программ к роботу могут быть подключены клавиатура, мышь, монитор. Изображение с видеокамеры может непосредственно транслироваться по Wi-Fi на мобильное устройство. Это будет интересно уже старшим школьникам и студентам.
Кроме программирования, робот позволяет изучать основы автоматического управления, понятия обратной связи, исследовать и настраивать ПИД-регуляторы. Для этого можно использовать поворот головы робота, как следящей системы, а обратная связь идет через видеокамеру, встроенную в голову робота. Используя встроенный IMU модуль, можно изучать понятие устойчивости, проблемы навигации, разрабатывать алгоритмы устойчивой ходьбы, ориентации и целенаправленного перемещения робота.
Недостатком прототипа является то, что микрокомпьютер выполнен без возможности обеспечения работы в автономном режиме.
Задачей заявленного технического решения является устранение недостатков прототипа и создание более конкурентоспособной модели, позволяющей повысить уровень теоретических, практических знаний, привитие навыков и приемов практического применения полученных знаний при обучении в образовательных учреждениях, а также обеспечение импортозамещения, более детально:
- использование робота в качестве учебного пособия,
- расширение области применения робота за счет применения использования дополнительных технических средств при обучении,
- обеспечение автономности робота за счет использования микрокомпьютера, размещенного в корпусе робота, при этом все модули информационно связаны с микрокомпьютером и подключены к центральному микроконтроллеру посредством интерфейсной шины, а сервоприводы выполнены управляемыми центральным микроконтроллером через плату для управления сервоприводами,
- обеспечение возможности использования при обучении робототехнике по всему спектру возможностей мобильных автономных роботов, например распознавание и синтез речи, распознавание и обход препятствий, изучение основ устойчивости антропоморфных роботов с применением гироскопов и т.д.
Технический результат, реализуемый в заявленном техническом решении, заключается в:
- расширении области обучения робототехнике;
- обучении программированию и конструированию в области информационных технологий и робототехники;
- повышении квалификации специалистов, с использованием в качестве инструмента обучения (интерактивного учебного пособия) заявленного образовательно-исследовательского комплекса робот малый антропоморфный (далее РОМА).
Основным предназначением заявленного технического решения являются:
- проведение лабораторных и исследовательских работ,
- демонстрация навыков, приобретенных в процессе обучения обучаемых в сфере программирования,
- демонстрация навыков, приобретенных в процессе обучения в области конструирования,
- демонстрация навыков, приобретенных в процессе обучения информационным технологиям и робототехники, а также проверка полученных знаний обучаемыми, привития практических навыков и знаний в указанных сферах практической деятельности.
Сущностью заявленного технического решения является образовательно-исследовательский комплекс для обучения робототехнике, содержащий робота антропоморфного и взаимодействующий с ним интерфейс с программным обеспечением для обучения робототехнике, при этом робот имеет корпус в виде двух манипуляторов с захватами, выполненными в виде клешней, туловища, двух ног и головы, размещенные в корпусе микрокомпьютер, соединенный с интерфейсом, центральный микроконтроллер, управляемый микрокомпьютером, сервоприводы, управляемые центральным микроконтроллером, систему технического зрения, состоящую из по меньшей мере одной видеокамеры, устройство обработки и передачи видеосигнала на монитор компьютера, ультразвуковые модули для измерения расстояния, размещенные в ступнях и в туловище, гироскоп, размещенный в туловище для определения положения туловища в пространстве и его угловой скорости перемещения, модуль распознавания голоса с микрофоном, способным распознавать голосовые команды, модуль воспроизведения речи, подключенный к динамику, датчики звука, RGB-светодиод и датчики сбоев, отличающийся тем, что микрокомпьютер выполнен с возможностью обеспечения работы в автономном режиме, при этом все упомянутые модули информационно связаны с микрокомпьютером и подключены к центральному микроконтроллеру посредством интерфейсной шины, а сервоприводы выполнены управляемыми центральным микроконтроллером через плату для управления сервоприводами.
Возможность достижения заявленного технического результата обусловлена тем, что наличие модулей позволяет использовать заявленный образовательно- исследовательский комплекс робот малый антропоморфный в качестве интерактивного обучающего пособия для отработки практических навыков обучаемых и кроме указанных выше задач предназначен для оценки преподавателем уровня приобретённых навыков обучаемыми в области программирования робототехники и конструирования.
Заявленное техническое решение поясняется Фиг.1 - Фиг.4.
На Фиг.1 представлена Таблица сопоставления функционала и стоимостей известных роботов и фото их внешнего вида.
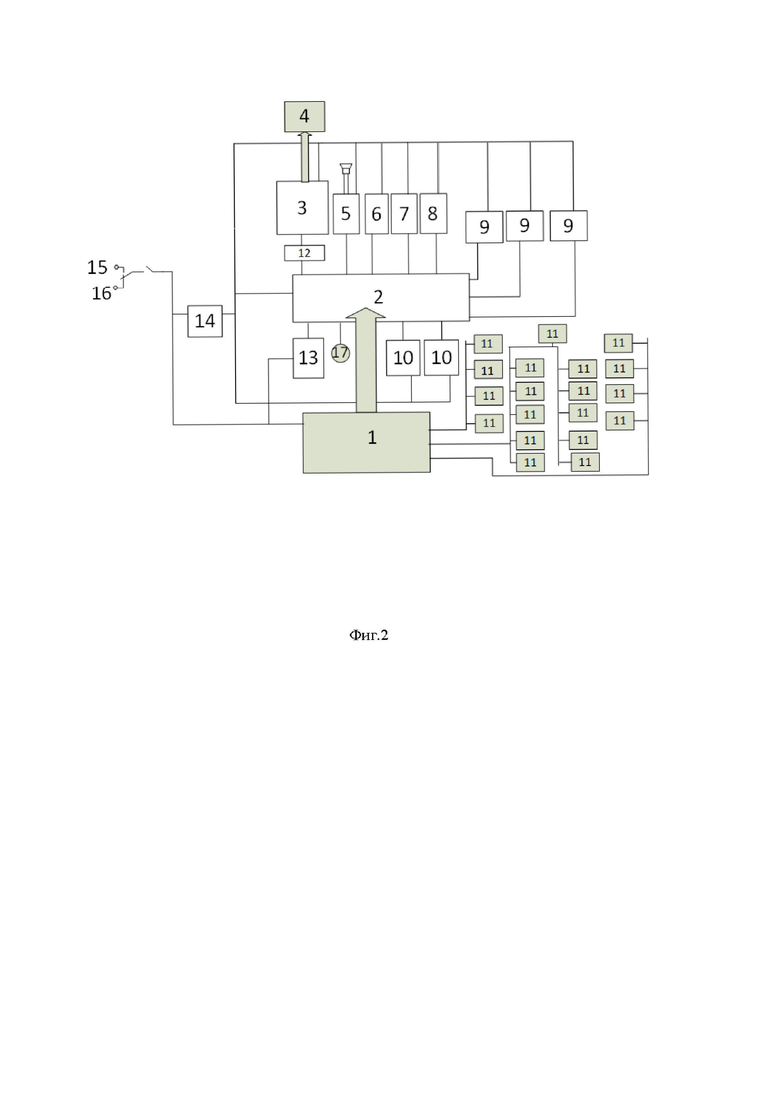
На Фиг. 2 представлена принципиальная схема образовательно-исследовательского комплекса робот малый антропоморфный (РОМА), где:
1 - плата расширения для управления сервоприводами
2 - центральный микроконтроллер
3 - микрокомпьютер с системой обработки и передачи видеосигнала на внешнее устройство
4 - система технического зрения
5 - модуль воспроизведения речи
6 - модуль удаленного управления
7 - модуль распознавания голоса с микрофоном
8 - модуль гироскопа
9 - ультразвуковые датчики
10 - модули обнаружения звука
11 - сервоприводы в количестве 19 шт.
12 - преобразователь уровня сигнала
13 - датчик сбоев
14 - стабилизатор напряжения
15 - батареи автономного питания
16 - разъём для подключения внешнего блока питания
17 - RGB-светодиод
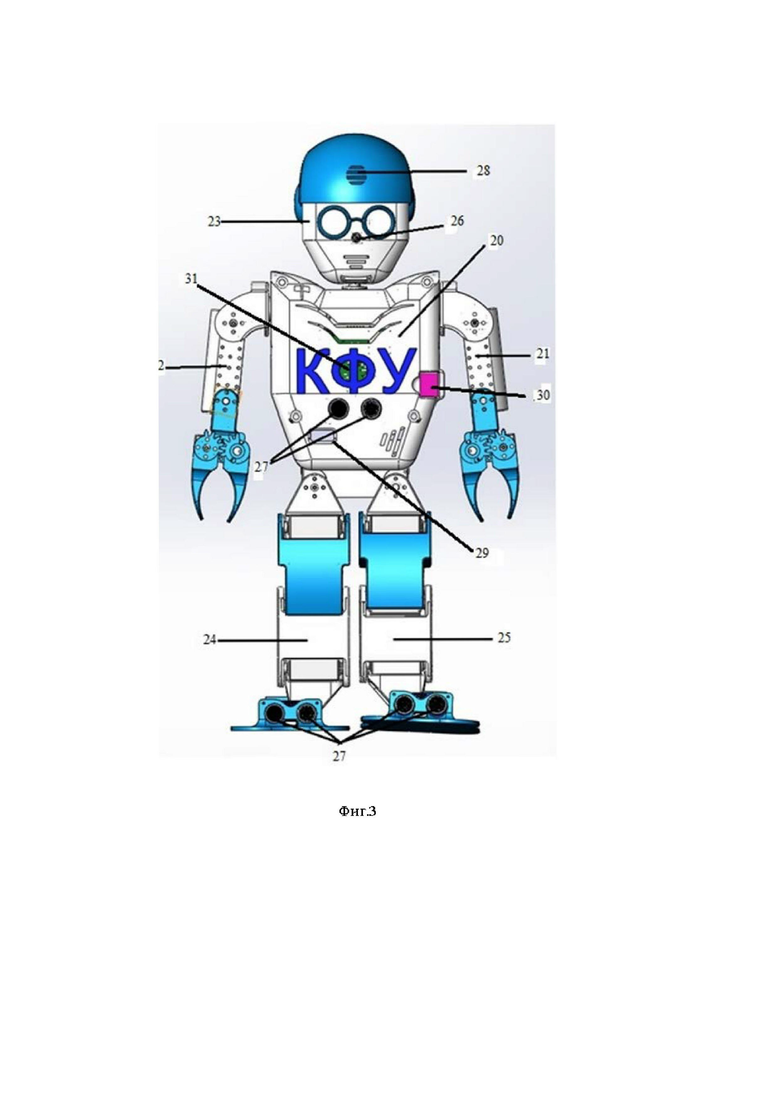
На Фиг.3 схематически представлен внешний вид образовательно-исследовательского комплекса робота малый антропоморфный (РОМА), вид спереди, где:
20 - корпус,
21 и 22 - два манипулятора,
23 - голова,
24 и 25 - две ноги,
26 - видеокамера,
27 - ультразвуковые датчики,
28 - микрофон модуля распознавания голоса,
29 - разъем HDMI,
30 - разъем для подключения кабеля Ethernet,
31 - динамик.
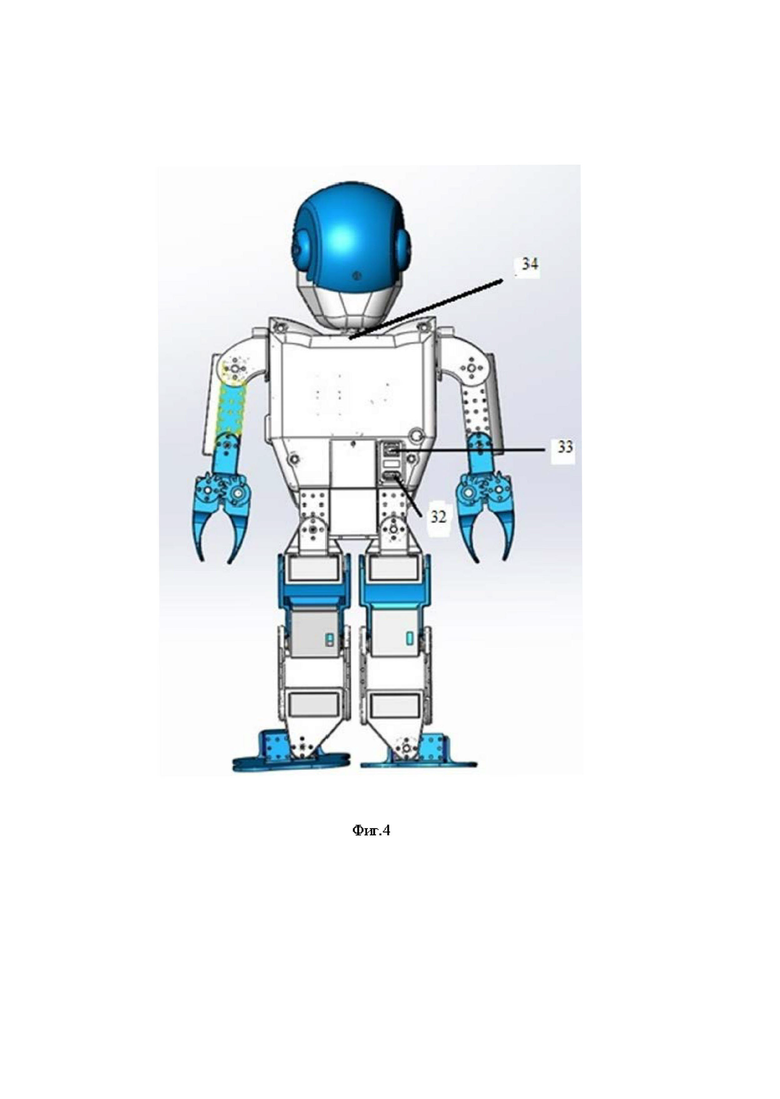
На Фиг.4 схематически представлен внешний вид образовательно-исследовательского комплекса робота малый антропоморфный (РОМА), вид сзади, где:
32 - два разъема для подключения USB (Type A),
33 - разъем USB (Type B),
34 - RGB-светодиод.
Более детально, сущностью заявленного технического решения является робот малый антропоморфный (РОМА), содержащий интерфейс взаимодействия, микрокомпьютер, микроконтроллер, управляемый микрокомпьютером, подсоединенную к микрокомпьютеру систему технического зрения, состоящую хотя бы из одной видеокамеры, устройство обработки и передачи видеосигнала на внешнее устройство, 19 сервоприводов, управляемые микроконтроллером через плату расширения для управления сервоприводами и датчик сбоев, помещенные в корпус, содержащий манипуляторы с захватами, выполненными, например, в виде клешней, отличающийся тем, что в конструкцию дополнительно включены ультразвуковые модули для измерения расстояния, например, в ступни и в туловище, гироскоп для определения положения туловища в пространстве и угловой скорости перемещения, например, в туловище, модуль распознавания голоса с микрофоном и датчики звука, например, в голову и туловище, способные распознавать, например, до 80 команд, а также модуль воспроизведения речи, подключенный к динамику, размещенному в передней части туловища, RGB-светодиод, установленный в верхней задней части туловища, способный выдавать сигнал о запрограммированном событии любым заранее определенным цветом, причём все дополнительные модули информационно связанны с компьютером и подключены к центральному микроконтроллеру посредством интерфейсной шины.
Далее заявителем представлено описание заявленного технического решения в отношении его конструктивных особенностей в статике и способ его работы на примере некоторых конкретных вариантах реализации со ссылкой на чертеж, где показана принципиальная блок-схема функционирования образовательно-исследовательского комплекса на базе робота малого антропоморфного (РОМА).
Представленная совокупность элементов конструкции, представленной на принципиальной блок - схеме на Фиг.2, функционирует следующим образом:
При использовании заявленной конструкции робота обучаемый, используя интерфейс взаимодействия, установленный на компьютере, программирует робота на выполнение различных команд, реализуя посредством заранее продуманного алгоритма поведения робота на установленном микрокомпьютере 3 как в автономном режиме, так и через модуль удаленного управления 6. Сигналы команд поступают на центральный микроконтроллер 2, который через подключение к плате расширения 1 управляет движением 19-ти сервоприводов 11. Дополнительно установлен преобразователь уровня сигнала 12, который способен повышать или понижать уровень сигнала в обоих направлениях для согласования между собой микросхем центрального микроконтроллера 2 и микрокомпьютера 3 с разными уровнями питающих напряжений. Модуль гироскопа 8 позволяет определять положение робота в пространстве, помогает сохранять устойчивость при ходьбе. RGB-светодиод 17 способен выдавать сигнал о запрограммированном событии путем мигания или свечения любым цветом.
Питание робота осуществляется за счёт батарей питания 15, напряжение для системы управления роботом малым антропоморфным стабилизируется на уровне 5 B внутренним стабилизатором 14. При подключении к разъему внешнего электропитания 16 внешнего блока питания робот автоматически переключается на внешнюю систему электропитания. Таким образом, батареи питания необходимы только для работы в автономном режиме.
Заявленный робот малый антропоморфный обеспечивает возможность выполнения следующих основных (базовых) для обучения функций, а именно:
- устойчивая ходьба двуногого антропоморфного робота,
- система технического зрения, например для обнаружения, сопровождения и идентификации заданного объекта,
- распознавание голосовых команд роботом, например команда «Вперед» для начала движения робота вперед,
- определения направления источника звука/команды с помощью модулей обнаружения звука, например, для поворота головы с встроенной видеокамерой в сторону источника звука,
- обнаружение, обход и предотвращение столкновения с препятствием с помощью ультразвуковых датчиков,
- использование светоизлучающих элементов, например RGB-светодиод для применения его в качестве индикатора заранее определенного запрограммированного события, например, распознавание голосовой команды, а имена RGB-светодиод загорается зеленым цветом при успешном распознавании команды и красным, если команда не распознана,
- изучение возможности использования датчиков на примере датчика, выполненного на датчике Холла, для обнаружения неисправностей сервоприводов путем постоянного анализа силы потребляемого тока,
- заявленный робот малый антропоморфный может быть использован в качестве обычного компьютера - разъем HDMI и 2 порта USB микрокомпьютера выведены наружу для подключения монитора, клавиатуры и компьютерной мыши.
При этом указанные функции не являются жестко зафиксированными, не ограничиваются представленными далее примерами использования, и могут быть расширены посредством доработки под конкретные задачи посредством подключения стандартными разъемами (комплектации) дополнительных датчиков, устройств, обеспечивающих расширение функциональных возможностей с доработкой программного обеспечения под конкретные задачи.
При этом заявленное техническое решение функционирует следующим образом.
Для реализации той или иной задачи и /или совокупности задач, заявителем далее представлены в укрупнённом виде конструктивные особенности восьми базовых функций, необходимых для обучения:
1 - для создания программы движений робота РОМЫ (ходьба, танцы и т.д.) используется заранее разработанное и прилагаемое к антропоморфному роботу программное обеспечение. При этом сначала необходимо определить, какие движения будет выполнять робот, и только после этого, используя готовое прилагаемое программное обеспечение, позволяющее записывать в файл с последующим воспроизведением последовательность фреймов (кадров), в каждом кадре прописывается необходимый угол поворота всех 19-ти сервоприводов, в результате выполнения которых осуществляется необходимое движение робота.
Созданный файл с набором фреймов загружается в микроконтроллер 2 и вызывается с помощью команд управления микрокомпьютера 3. Сигналы для сервоприводов 11 подаются микроконтроллером 2 через плату расширения 1. При необходимости для контроля устойчивости робота во время движения используется сигналы модуля гироскопа 8, подключенного к микроконтроллеру 2 по протоколу I2C. С помощью модуля удаленного управления 6 (модуль Bluetooth), подключенного к микроконтроллеру 3 по протоколу UART, можно передавать команды на микрокомпьютер 3 для их выполнения (например, для движения робота вперед передается команда “вперед” со смартфона или компьютера).
2 - система технического зрения, представляющая из себя видеокамеру 4, подключенную к микрокомпьютеру 3 с помощью шлейфа. Позволяет передавать изображение с камеры робота 4 на монитор компьютера (или смартфон) в режиме on-line посредством передачи видео через беспроводное соединение Wi-Fi, установленное модулем микрокомпьютера 3. Используется так же для распознавания лиц, различных объектов при изучении технического зрения роботов путем установки/создания соответствующего программного обеспечения на микрокомпьютер 3.
3 - голосовые команды роботом распознаются с помощью модуля распознавания звука 7 (загруженное на модуле программное обеспечение заводом-изготовителем позволяет записать на модуль и в дальнейшем распознавать 80 коротких (не более 1.5. сек длительности) голосовых команд, подключенного к модулю микроконтроллера 2 по протоколу UART. Реакцией на команды могут быть как различные движения робота («Вперед!», «Стой» и т.д.), так и голосовой ответ посредством модуля воспроизведения речи 5 заранее записанных фраз на SD карту, установленную в модуле, (в случае, если был задан вопрос), подключенного к модулю микроконтроллера 2 по протоколу UART. Модуль воспроизведения речи позволяет воспроизвести 255 звуковых файлов, расположенных в 100 директориях. Всего 25500 файлов.
Кроме этого, подключив дополнительно к модулю микрокомпьютера 3 (к разъему USB) внешний микрофон и установив дополнительное программное обеспечение, есть возможность использовать микрокомпьютер 3 в качестве устройства распознавания и синтеза речи.
4 - модули обнаружения звука 10 подключены к аналоговым входам модуля микроконтроллера 2 и могут быть использованы для определения направления источника звука/команды и поворота головы робота в сторону источника звука для наведения видеокамеры 4 на источник звука/команды.
5 - ультразвуковые датчики 9, подключенные к цифровым входам модуля микроконтроллера 2, два из которых установлены в передней части стоп ног, а один в передней части туловища, позволяют обнаруживать препятствия (датчики в ногах позволяют, например, выполнить упражнение - подъем по ступеням лестницы).
6 - установленный в верхнюю заднюю часть туловища RGB-светодиод 17, подключенный к трем цифровым входам модуля микроконтроллера 2, позволяет использовать его в качестве индикатора заранее определенного события. Например, он может светиться красным цветом в случае обнаружения препятствия на пути робота, или синим цветом, в случае если звуковая команда распознана, и желтым, если нет.
7 - установленный в туловище робота датчик сбоев 13 (выполненный на датчике Холла) анализирует потребляемый ток сервоприводами 11 робота и выдает сигнал - прерывание на центральный микроконтроллер 2, запуская программу остановки сервоприводов 11 с целью предотвращения перегрева и выхода их из строя.
8 - разъем HDMI и 2 порта USB микрокомпьютера 3 выведены наружу для подключения монитора, клавиатуры и компьютерной мыши. В результате образовательно-исследовательский комплекс может быть использован в качестве обычного компьютера, что позволяет расширить функциональные возможности робота в изучении различных операционных систем, языков программирования и написании программ для робототехнических систем.
Основываясь на представленном выше описании общего характера, представляется возможным сделать вывод о том, что заявленное техническое решение позволяет реализовать все базовые цели и достигнуть все поставленные технические результаты, а именно:
Для оценки качества усвоения материала обучаемыми и глубины понимания сути работы подсистем роботизированных комплексов есть возможность вносить искусственные неисправности в каждую из подсистем робота, например, путем отключения выбранных заранее контактов определенных датчиков, установки программных «заглушек» в программное обеспечение робота. При этом обучаемый должен понять суть неисправности, найти причину и устранить ее с тем, чтобы в результате получить полностью функционирующий комплекс.
Вариант осуществления заявленного технического решения представлен на Фиг.3 (вид спереди) и Фиг.4 (вид сзади).
На Фиг. 3 образовательно-исследовательский комплекс робот малый антропоморфный (РОМА) включает корпус 20, два манипулятора 21 и 22, голову 23, две ноги 24 и 25. Каждый манипулятор, например, 21, имеет 4 степени свободы и 1 захват. Головная часть робота 23 имеет, например, 1 степень свободы. Каждая нога (24, 25) имеет, например, 5 степеней свободы. Видеокамера - 26, 27 - ультразвуковые датчики, 28 - микрофон модуля распознавания голоса, 29 - разъем HDMI, 30 - разъем для подключения кабеля Ethernet, 31 - динамик.
На Фиг. 4 в корпусе робота имеются: 32 - два разъема для подключения USB (Type A), 33 - разъем USB (Type B), 34 - RGB-светодиод.
Использование образовательно-исследовательского комплекса робот малый антропоморфный (РОМА) в учебном процессе в целом позволяет обеспечить творческий подход к обучению, отработку обучаемым на практике практических навыков и в некоторой степени формализовать педагогический процесс, облегчив преподавателям оценку освоенных навыков в программировании, конструировании, робототехнике.
При этом немаловажным является и то, что заявленное техническое решение позволяет в короткий временной интервал обеспечить импортозамещение в силу того, что в нем (РОМА) использованы доступные комплектующие, доступное (бесплатное) программное обеспечение, совокупность указанных характеристик обеспечивает создание и широкое тиражирование как на территории РФ, стран СНГ собственной системы обучения, переподготовки основам робототехники, программирования, характеризуется в целом тем, что освоение указанной системы даёт базовые знания для работы с более сложными и дорогостоящими системами зарубежного производства, т.к. они (системы зарубежного производства) в своей основе не отличаются принципом действия и т.д. от заявленного технического решения, что является основой высокой конкурентоспособности на внутреннем и зарубежных рынках.
Таким образом, можно сделать вывод, что заявителем достигнут заявленный технический результат, направленный на:
- расширение области обучения робототехнике;
- обучение программированию и конструированию в области информационных технологий и робототехники;
- повышение квалификации специалистов, с использованием в качестве инструмента обучения (интерактивного учебного пособия) заявленного образовательно-исследовательского комплекса робот малый антропоморфный (далее РОМА).
Заявленное техническое решение соответствует критерию «новизна», предъявляемому к изобретениям, т.к. из исследованного уровня техники заявителем не выявлено технических решений, имеющих заявленную совокупность признаков.
Заявленное техническое решение соответствует критерию «изобретательский уровень», предъявляемому к изобретениям, так как не является очевидным для специалиста в анализируемой области техники.
Заявленное техническое решение соответствует критерию «промышленная применимость», предъявляемому к изобретениям, т.к. может быть реализовано на любом специализированном предприятии с использованием стандартного оборудования, известных отечественных материалов и технологий.
Изобретение относится к образовательно-исследовательскому комплексу для обучения робототехнике. Комплекс содержит робота антропоморфного и взаимодействующий с ним интерфейс с программным обеспечением для обучения робототехнике. Робот имеет корпус в виде двух манипуляторов с захватами, выполненными в виде клешней, туловища, двух ног и головы, размещенные в корпусе микрокомпьютер, соединенный с интерфейсом, центральный микроконтроллер, управляемый микрокомпьютером, сервоприводы, управляемые центральным микроконтроллером, систему технического зрения, состоящую из по меньшей мере одной видеокамеры, устройство обработки и передачи видеосигнала на монитор компьютера, ультразвуковые модули для измерения расстояния, размещенные в ступнях и в туловище, гироскоп, размещенный в туловище для определения положения туловища в пространстве и его угловой скорости перемещения, модуль распознавания голоса с микрофоном, способным распознавать голосовые команды, модуль воспроизведения речи, подключенный к динамику, датчики звука, RGB-светодиод и датчики сбоев. Микрокомпьютер выполнен с возможностью обеспечения работы в автономном режиме, при этом все упомянутые модули информационно связаны с микрокомпьютером и подключены к центральному микроконтроллеру посредством интерфейсной шины, а сервоприводы выполнены управляемыми центральным микроконтроллером через плату для управления сервоприводами. Технический результат заключается в расширении области обучения робототехнике, возможности обучения программированию и конструированию в области информационных технологий и робототехники. 4 ил.
Образовательно-исследовательский комплекс для обучения робототехнике, содержащий робота антропоморфного и взаимодействующий с ним интерфейс с программным обеспечением для обучения робототехнике, при этом робот имеет корпус в виде двух манипуляторов с захватами, выполненными в виде клешней, туловища, двух ног и головы, размещенные в корпусе микрокомпьютер, соединенный с интерфейсом, центральный микроконтроллер, управляемый микрокомпьютером, сервоприводы, управляемые центральным микроконтроллером, систему технического зрения, состоящую из по меньшей мере одной видеокамеры, устройство обработки и передачи видеосигнала на монитор компьютера, ультразвуковые модули для измерения расстояния, размещенные в ступнях и в туловище, гироскоп, размещенный в туловище для определения положения туловища в пространстве и его угловой скорости перемещения, модуль распознавания голоса с микрофоном, способным распознавать голосовые команды, модуль воспроизведения речи, подключенный к динамику, датчики звука, RGB-светодиод и датчики сбоев, отличающийся тем, что микрокомпьютер выполнен с возможностью обеспечения работы в автономном режиме, при этом все упомянутые модули информационно связаны с микрокомпьютером и подключены к центральному микроконтроллеру посредством интерфейсной шины, а сервоприводы выполнены управляемыми центральным микроконтроллером через плату для управления сервоприводами.
| СИРАЗЕТДИНОВ Р.Т | |||
| и др., Новые технологии образования на основе малоразмерного антропоморфного робота РОМА, Информация и образование, Москва, Информация и образование, N1 (300), февраль, 2019, с.33-36 | |||
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |
| CN 0207495510 U, 15.06.2018 | |||
| JP 2004160630 A, 10.06.2004 | |||
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОГО РОБОТА | 2004 |
|
RU2265803C1 |

