Область техники, к которой относится изобретение
Настоящая группа изобретений относится к микроскопу, устройству получения изображения и системе получения изображения.
Уровень техники
В области патологии внимание привлекает система получения изображения, которая захватывает изображение микропрепарата для получения цифрового изображения (виртуального изображения микропрепарата) с использованием микроскопа (цифрового микроскопа) и отображает на блоке отображения цифровое изображение с высоким разрешением.
К микроскопу предъявляется требование быстрого захвата изображения микропрепарата с высоким разрешением. Для удовлетворения этому требованию необходимо захватывать изображение по возможности более широкой области микропрепарата и с высоким разрешением. В патентной литературе 1 рассматривается микроскоп с использованием широкоугольного объектива с высокой разрешающей способностью и группы датчиков изображения, расположенных в поле объектива.
В патентной литературе 2 рассматривается микроскоп, в котором для получения с высокой эффективностью высокоразрешающего цифрового изображения захватывается изображение микропрепарата с низким разрешением в качестве предварительного измерения, а затем захватывается изображение микропрепарата только для области существования на микропрепарате, в которой образец (биологический образец) находится, с высоким разрешением. В патентной литературе 3 рассматривается микроскоп, в котором при захвате изображения микропрепарата, включающего в себя множество биологических образцов, изменяется фокус объектива применительно к каждому биологическому образцу.
Перечень ссылок
Патентная литература
Патентная литература 1: выложенная заявка №2009-003016 на патент Японии.
Патентная литература 2: выложенная заявка №2007-310231 на патент Японии.
Патентная литература 3: выложенная заявка №2007-233098 на патент Японии.
Раскрытие изобретения
Техническая проблема
С повышением разрешающей способности объектива уменьшается глубина резкости объектива. При герметизации образца между предметным стеклом и покровным стеклом путем их склеивания может изменяться форма покровного стекла и образца. Если образец деформирован и его поверхность является волнистой, часть образца не будет соответствовать глубине резкости объектива, при этом невозможно получать предпочтительное изображение, имеющее небольшую размытость.
Решение проблемы
Настоящее изобретение касается микроскопа, способного получать предпочтительное цифровое изображение, имеющее небольшую размытость даже в случае использования широкоугольного объектива с высокой разрешающей способностью.
Согласно аспекту настоящего изобретения микроскоп для захвата изображения объекта включает в себя осветительное устройство, сконфигурированное для освещения объекта, оптическую систему, сконфигурированную для фокусировки изображения объекта, и устройство формирования изображения для захвата изображения объекта, при этом устройство формирования изображения включает в себя множество блоков формирования изображения, а каждый из блоков формирования изображения включает в себя датчик изображения и механизм перемещения для перемещения датчика изображения.
[Полезные результаты изобретения]
Предложен микроскоп, способный получать предпочтительное цифровое изображение, имеющее небольшую размытость.
Дальнейшие признаки и аспекты настоящего изобретения станут понятными из нижеследующего подробного описания примерных вариантов осуществления с обращением к прилагаемым чертежам.
Краткое описание чертежей
Сопровождающими чертежами, которые включены в описание изобретения и образуют его часть, иллюстрируются примерные варианты осуществления, признаки и аспекты изобретения, и совместно с описанием чертежи служат для пояснения принципов изобретения. На чертежах:
фиг.1 - вид системы 100 получения изображения;
фиг.2А - вид сверху, иллюстрирующий исследуемый объект 30;
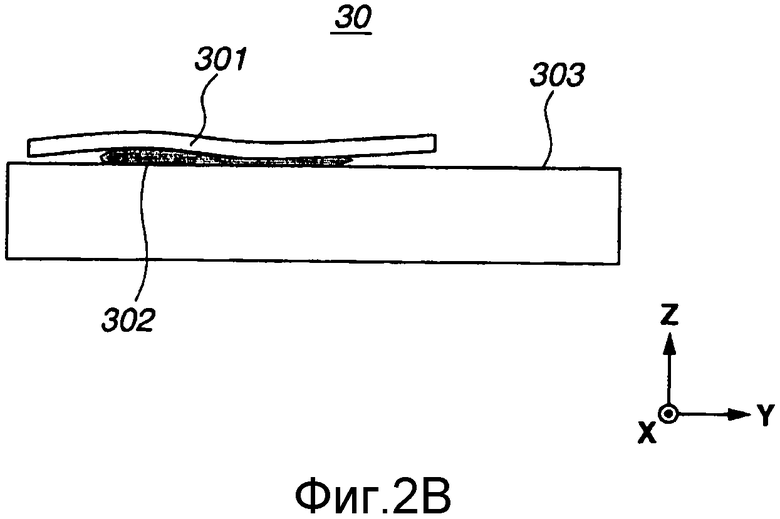
фиг.2В - разрез, иллюстрирующий исследуемый объект 30;
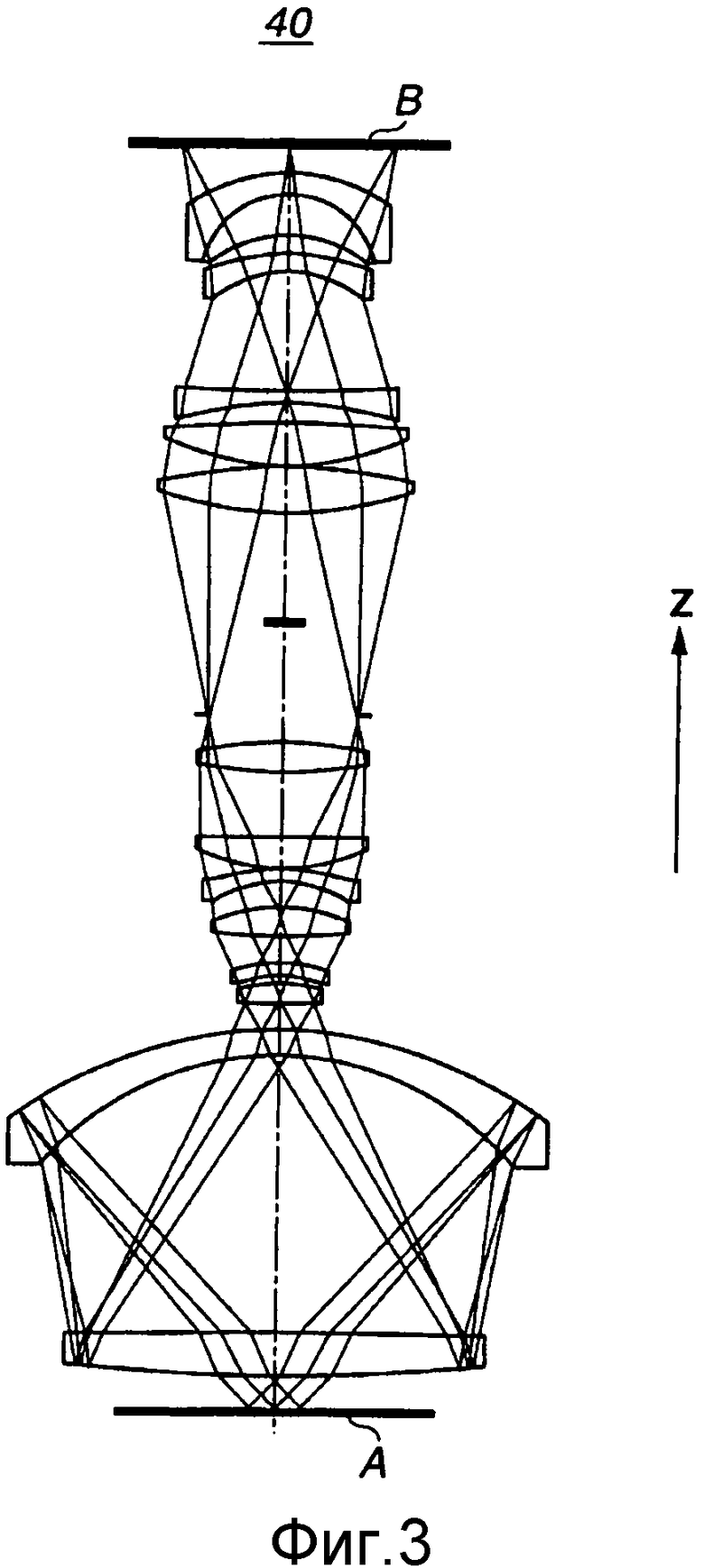
фиг.3 - схема объектива 40;
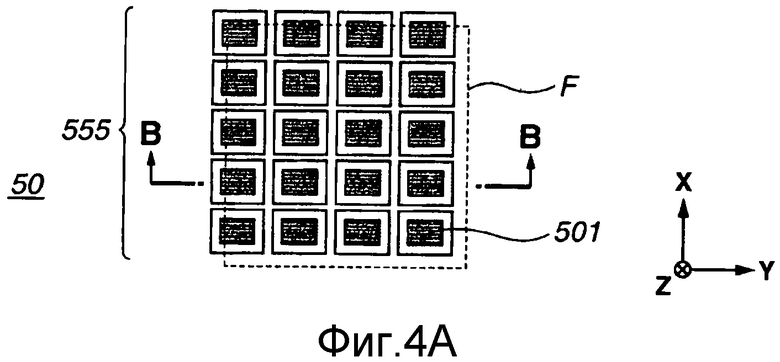
фиг.4А - вид сверху, иллюстрирующий устройство 50 формирования изображения;
фиг.4В - разрез, иллюстрирующий устройство 50 формирования изображения;
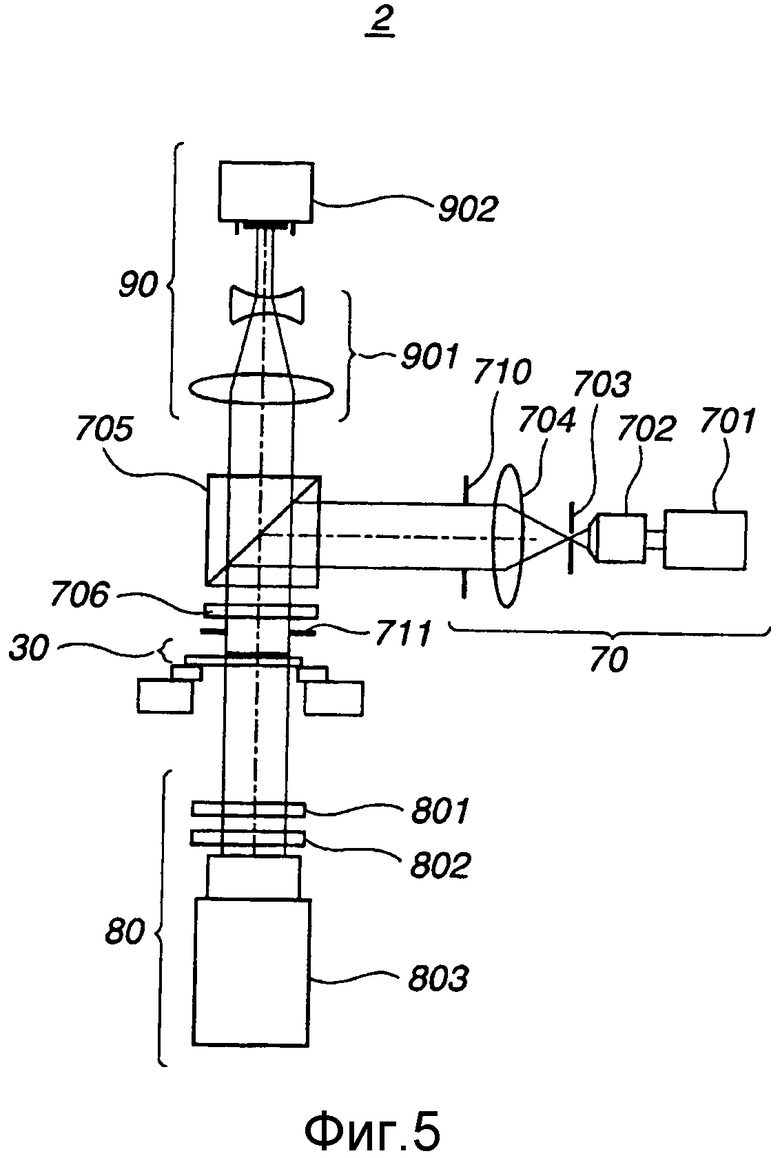
фиг.5 - вид измерительного устройства 2;
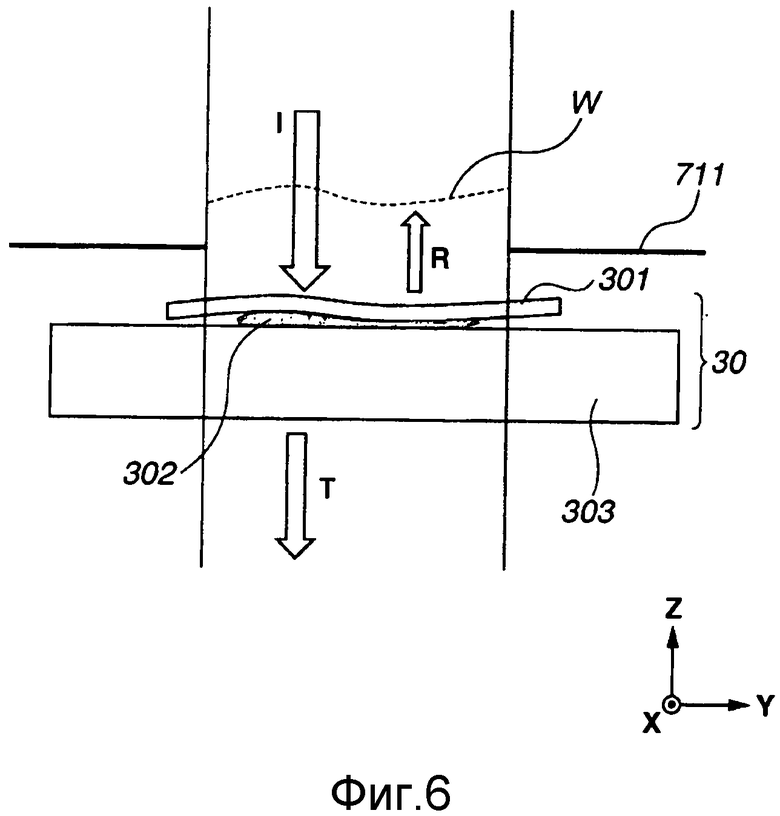
фиг.6 - иллюстрация пропускаемого света Т и отражающегося света R применительно к исследуемому объекту 30;
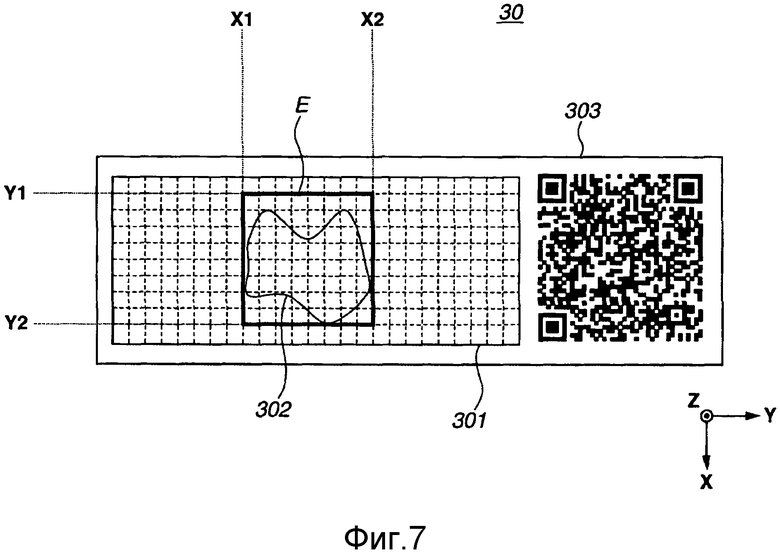
фиг.7 - вид области Е существования, в которой находится исследуемый объект 30;
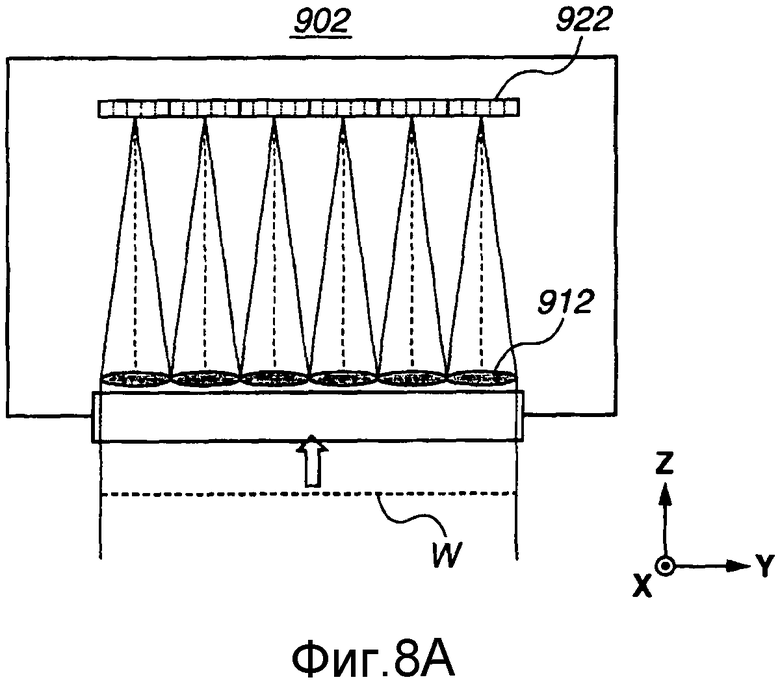
фиг.8А - разрез, иллюстрирующий датчик 902 волнового фронта Шака-Гартмана (когда падающий свет имеет плоский волновой фронт W);
фиг.8В - разрез, иллюстрирующий датчик 902 волнового фронта Шака-Гартмана (когда падающий свет имеет искаженный волновой фронт W);
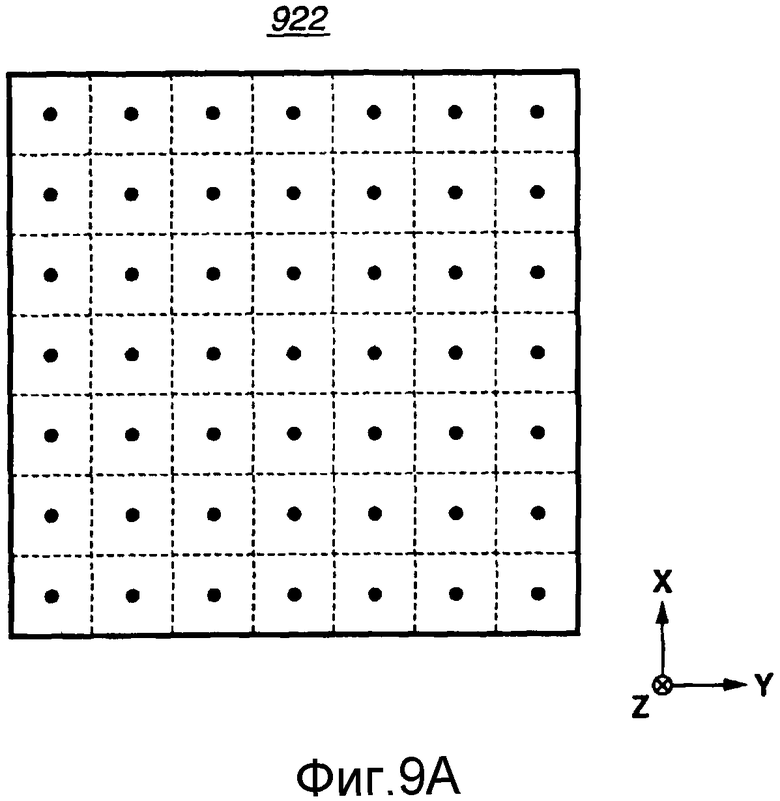
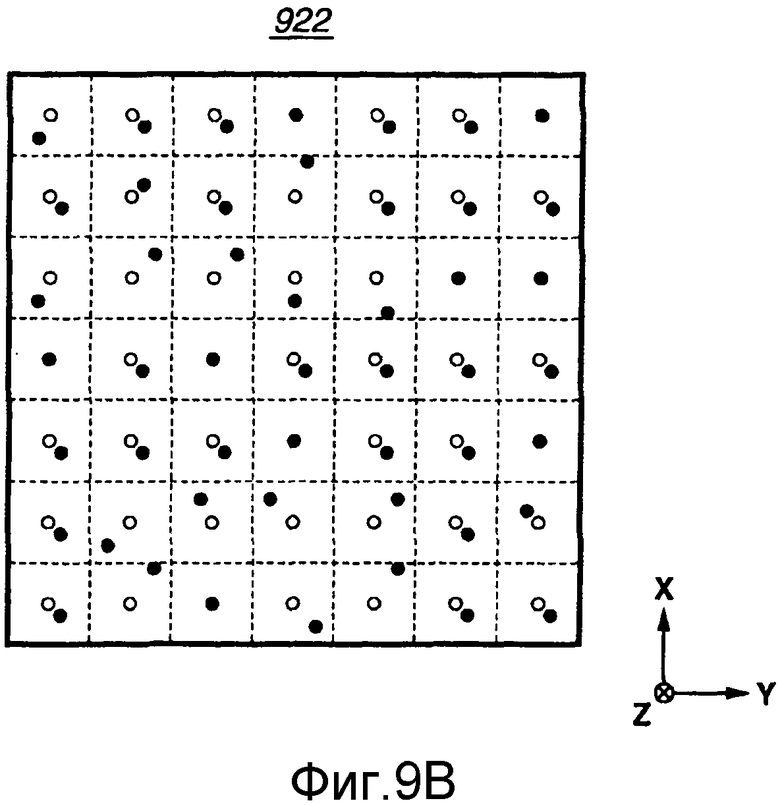
фиг.9А - вид сверху, иллюстрирующий детекторную матрицу 922 (когда падающий свет имеет плоский волновой фронт W);
фиг.9В - вид сверху, иллюстрирующий детекторную матрицу 922 (когда падающий свет имеет искаженный волновой фронт W);
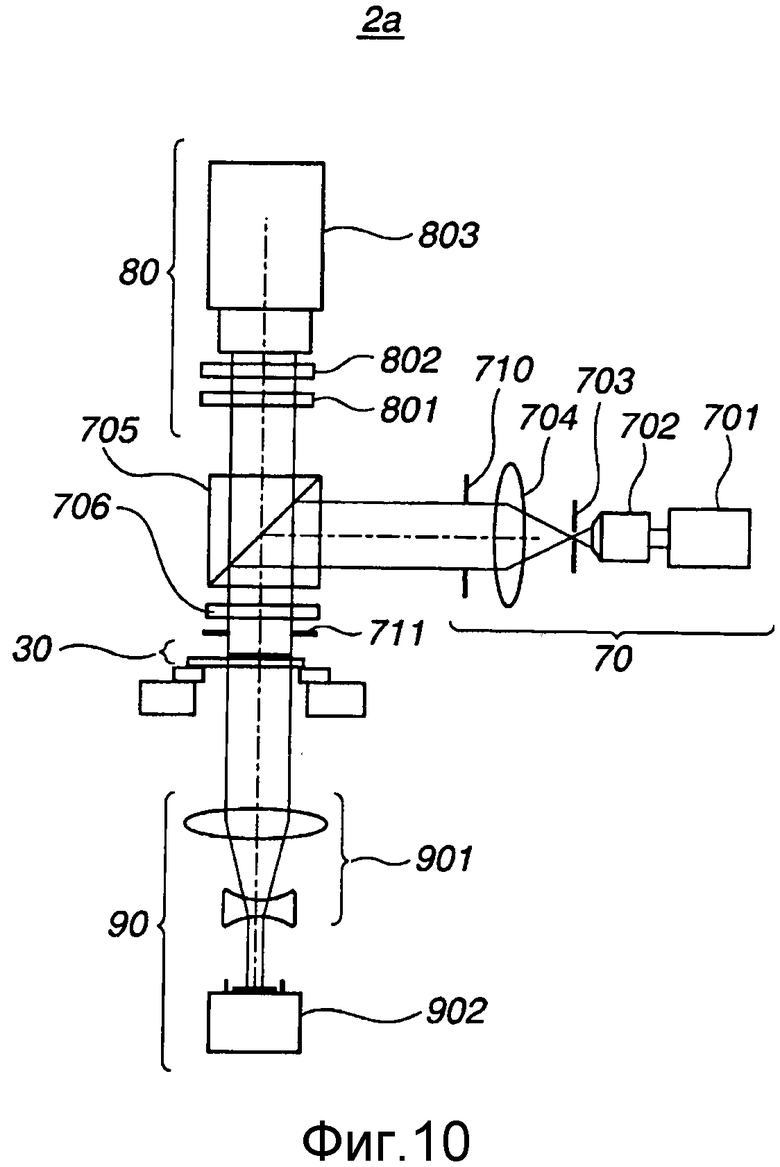
фиг.10 - вид измерительного устройства 2а, которое представляет собой вариант измерительного устройства 2;
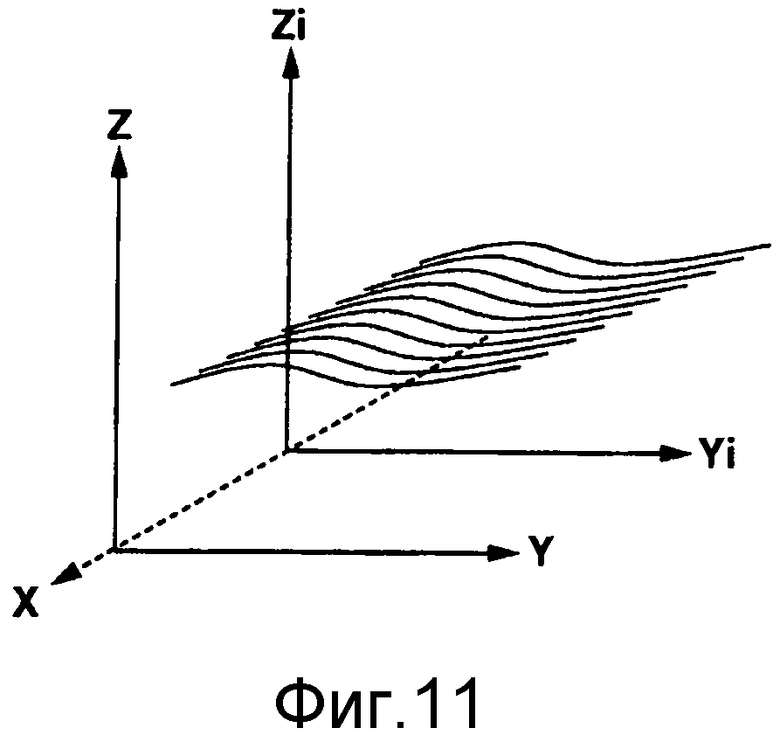
фиг.11 - схематичный вид, иллюстрирующий находящуюся в фокусе криволинейную поверхность;
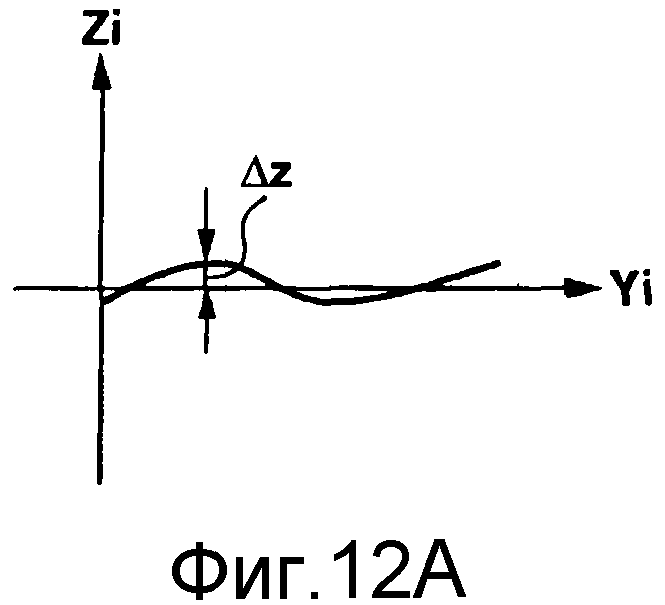
фиг.12А - вид находящейся в фокусе кривой изображения образца 302;
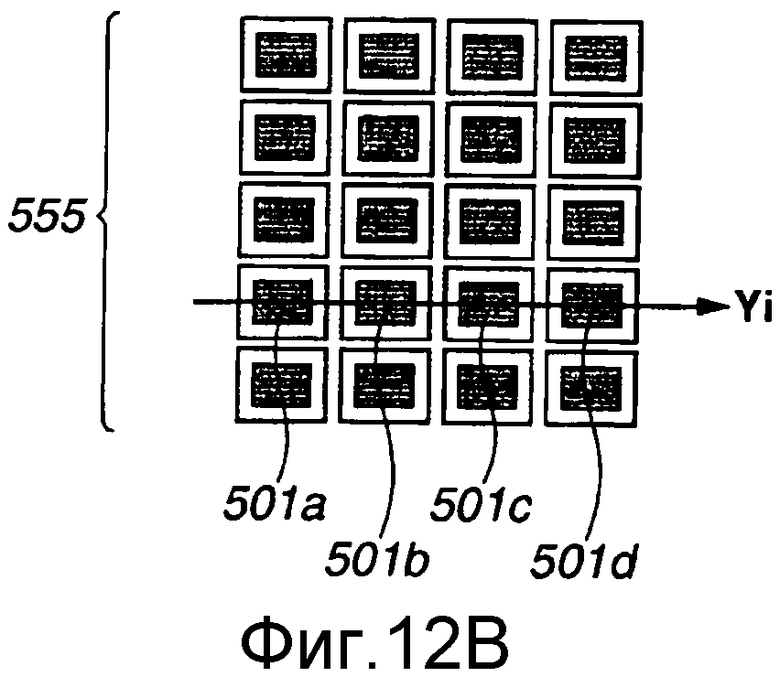
фиг.12В - вид сверху, иллюстрирующий группу 555 датчиков изображения;
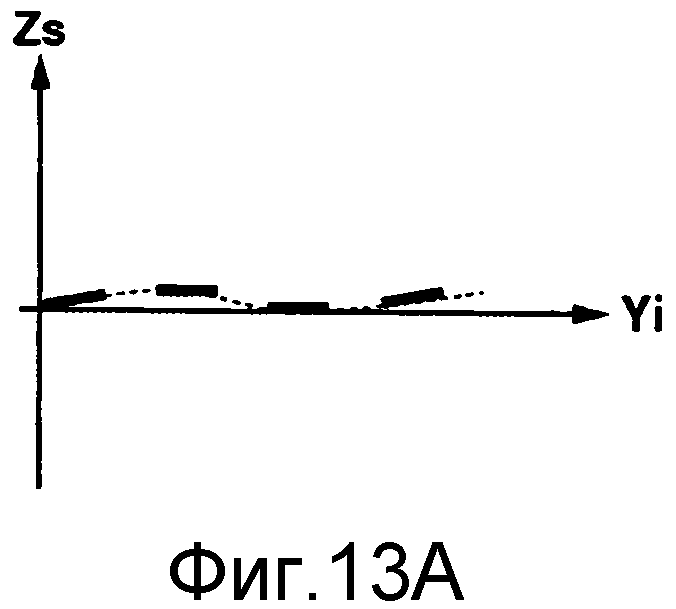
фиг.13А - виды находящейся в фокусе кривой изображения образца 302 и поверхностей восприятия изображения датчиков с 501а по 501d изображения;
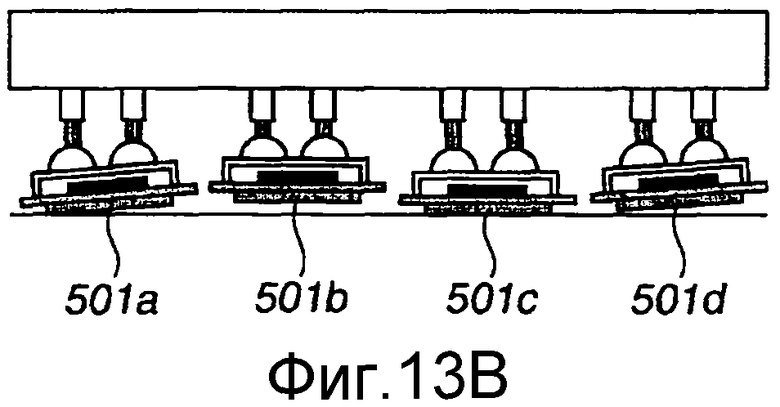
фиг.13В - разрез, иллюстрирующий устройство 50 формирования изображения;
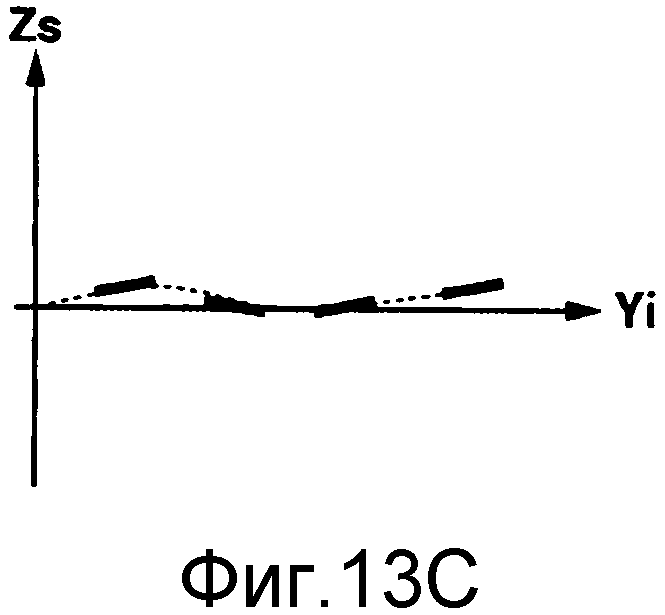
фиг.13С - виды находящейся в фокусе кривой изображения образца 302 и поверхностей восприятия изображения датчиков с 501а по 501d изображения;
фиг.13D - разрез, иллюстрирующий устройство 50 формирования изображения;
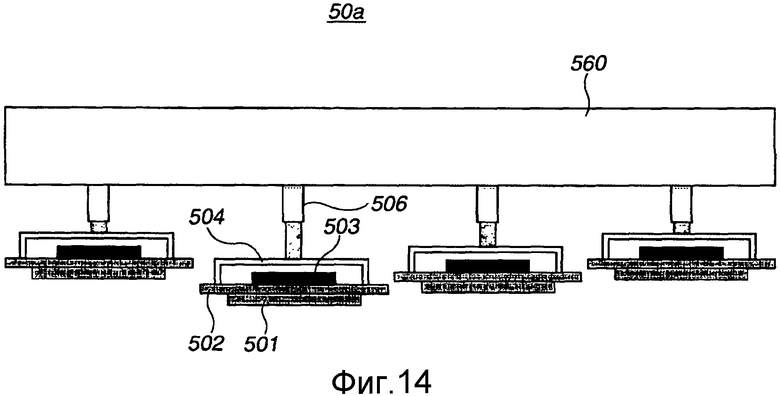
фиг.14 - вид устройства 50а формирования изображения, которое представляет собой вариант устройства 50 формирования изображения;
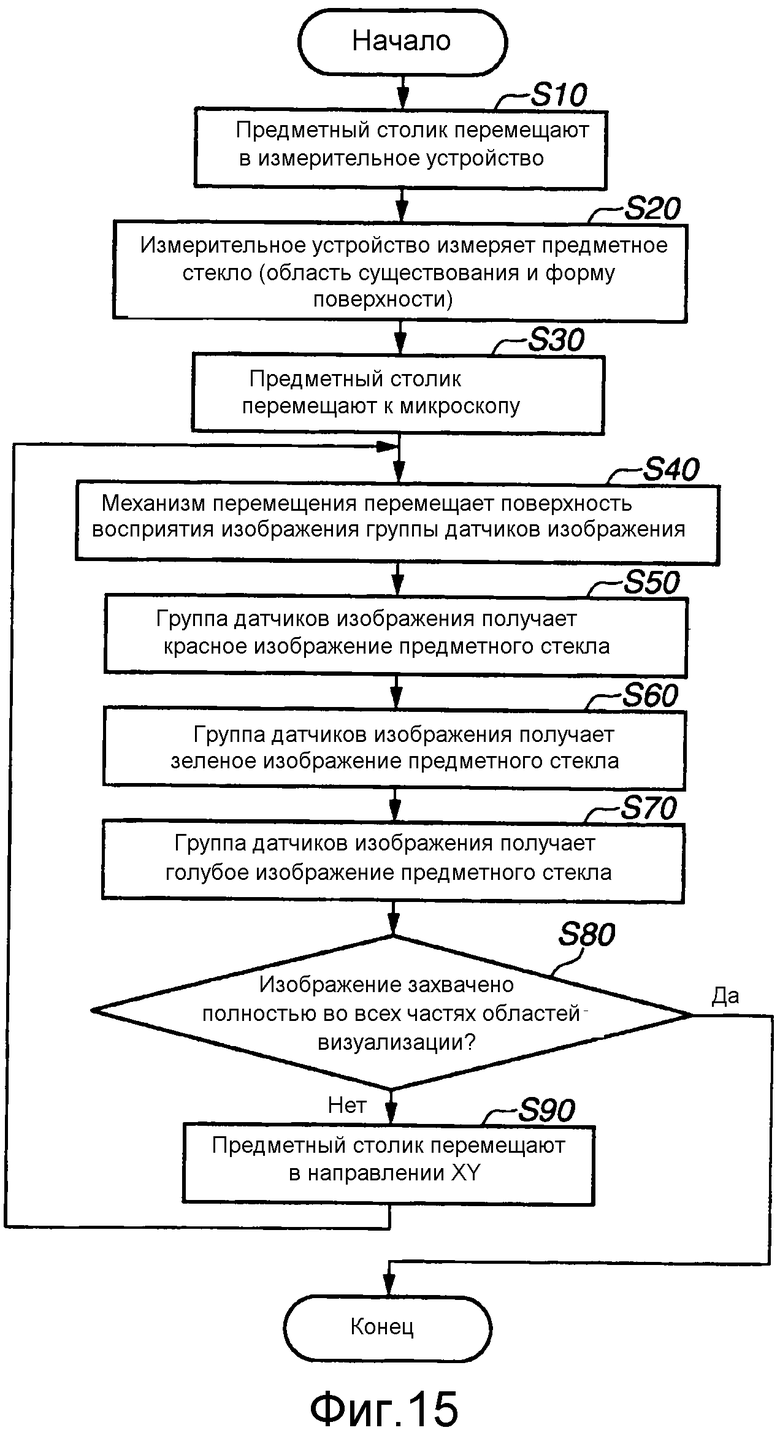
фиг.15 - блок-схема последовательности действий, поясняющая работу устройства получения изображения;
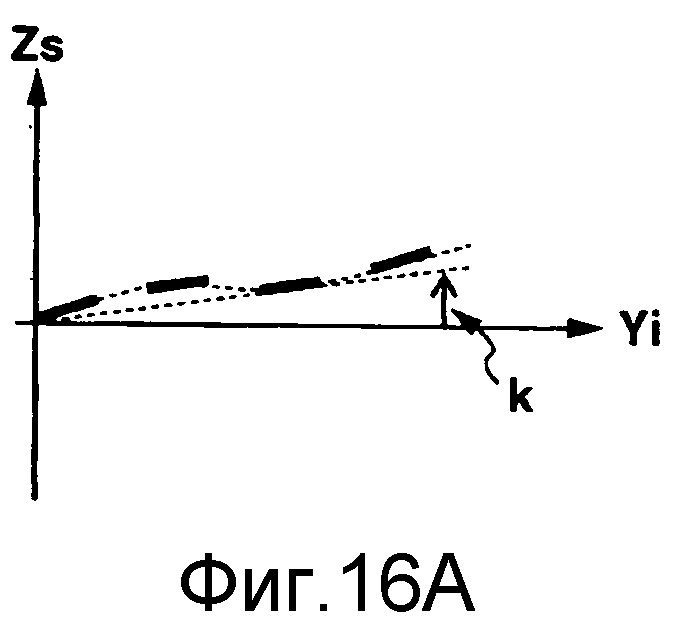
фиг.16А - виды находящейся в фокусе кривой изображения образца 302 и поверхностей восприятия изображения датчиков с 501а по 501d изображения;
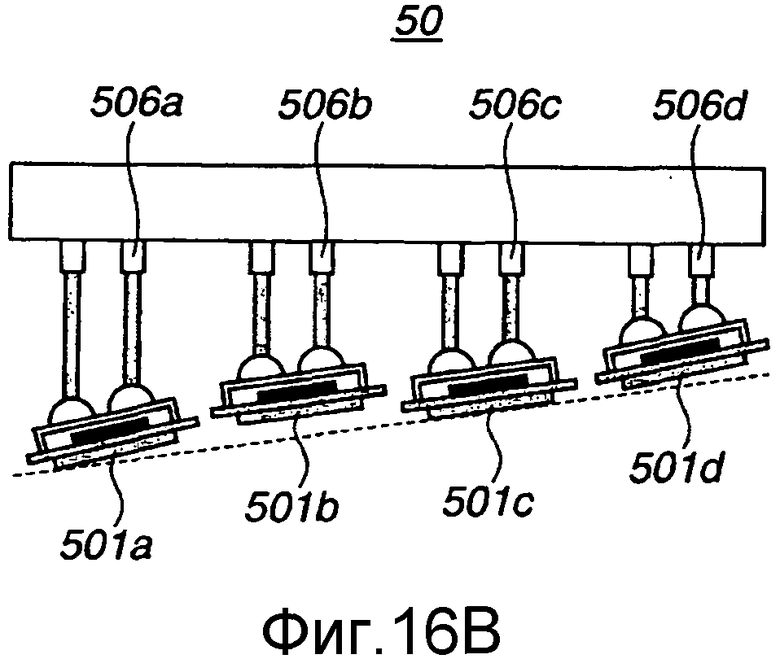
фиг.16В - разрез, иллюстрирующий устройство 50 формирования изображения; и
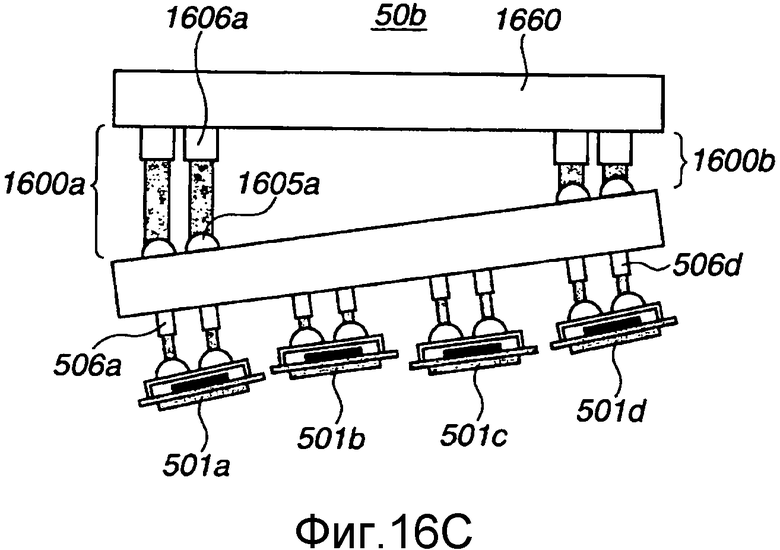
фиг.16С - разрез, иллюстрирующий устройство 50b формирования изображения, которое представляет собой вариант устройства 50 формирования изображения.
Осуществление изобретения
Ниже с обращением к чертежам будут подробно описаны различные примерные варианты осуществления, признаки и аспекты изобретения.
Устройство получения изображения согласно аспекту настоящего изобретения включает в себя множество датчиков изображения и множество механизмов перемещения и сконфигурировано так, что каждый из механизмов перемещения перемещает каждый из датчиков изображения.
Конфигурация, в которой каждый из механизмов перемещения перемещает каждый из датчиков изображения, будет особо описана ниже. Один или несколько (обычно три, как в случае, описываемом ниже) механизмов перемещения соединены с одним датчиком изображения. Один или несколько механизмов перемещения изменяют положение и/или наклон одного датчика изображения. В наиболее типичном случае один или несколько механизмов перемещения соединены со всеми датчиками изображения, что делает возможным независимое управление положением и/или наклоном каждого датчика изображения.
Ниже с обращением к сопровождающим чертежам будут описаны предпочтительные примерные варианты осуществления настоящего изобретения. На каждом чертеже идентичные элементы обозначаются одинаковыми позициями и дублирующие пояснения будут опускаться.
На фиг.1 показана система 100 получения изображения. Система 100 получения изображения согласно данному примерному варианту осуществления изобретения будет описана ниже с обращением к фиг.1. Система 100 получения изображения захватывает изображение исследуемого объекта (микропрепарата) и воспроизводит изображение.
Система 100 получения изображения включает в себя микроскоп (цифровой микроскоп) 1 для захвата изображения микропрепарата 30, измерительное устройство 2 для выполнения предварительного измерения на микропрепарате 30, управляющее устройство 3 для управления микроскопом 1 и измерительным устройством 2 с образованием цифрового изображения, и устройство отображения 4 для отображения цифрового изображения. Система 100 получения изображения сначала выполняет предварительное измерение на микропрепарате 30 с помощью измерительного устройства 2 и затем захватывает изображение микропрепарата 30 с помощью микроскопа 1. Микроскоп 1, измерительное устройство 2 и управляющее устройство 3 образуют устройство получения изображения, предназначенное для получения цифрового изображения микропрепарата 30.
Микроскоп 1 будет описан ниже. Микроскоп 1 включает в себя осветительное устройство 10 для освещения микропрепарата 30, объектив 40 для формирования изображения микропрепарата 30, устройство 50 формирования изображения для захвата изображения микропрепарата 30, площадку 60 устройства формирования изображения, предназначенную для удержания устройства 50 формирования изображения, и предметный столик 20 для поддержания и перемещения микропрепарата 30.
Осветительное устройство 10 включает в себя блок источника света и оптическую систему для направления света от блока источника света к микропрепарату 30. Блок источника света может быть источником белого света или источником света, позволяющим выбирать свет с длиной волны, соответствующей красному, зеленому и голубому цвету. В данном примерном варианте осуществления использован источник света на основе светоизлучающих диодов (СИД), позволяющий выбирать красный, зеленый и голубой свет.
Оптическая система включает в себя коллиматор для коллимации расходящегося светового пучка от блока источника света в параллельные лучи света и систему освещения по Келеру для направления параллельных лучей света и подведения освещения по Келеру к микропрепарату 30. Оптическая система может включать в себя оптический фильтр. Предпочтительно, чтобы осветительное устройство 10 было сконфигурировано для получения возможности переключения между регулярным освещением и кольцевым освещением микропрепарата 30.
Предметный столик 20 включает в себя крепежный элемент (непоказанный) для фиксации микропрепарата 30, двумерный трансляционный столик 22 для перемещения крепежного элемента в направлениях X и Y и одномерный трансляционный столик 24 для перемещения крепежного элемента в направлении Z. Направление Z представляет собой направление оптической оси объектива 40. Направления X и Y представляют собой направления, перпендикулярные направлению оптической оси.
Каждый из двумерного трансляционного столика 22 и одномерного трансляционного столика 24 снабжен отверстием, через которое проходит свет от осветительного устройства 10. Предметный столик 20 может возвратно-поступательно перемещаться между микроскопом 1 и измерительным устройством 2.
На фиг.2А представлен вид сверху, иллюстрирующий исследуемый объект 30. На фиг.2В представлен разрез, иллюстрирующий исследуемый объект 30. Как показано на фигурах 2А и 2В, микропрепарат (препарат) 30, пример исследуемого объекта, включает в себя покровное стекло 301, образец 302 и предметное стекло 303.
Образец 302 (биологический образец, такой как срез ткани), помещенный на предметное стекло 303, герметизирован покровным стеклом 301 и клеящим веществом (непоказанным). Маркировочный знак (штрих-код) 333 с записью информации, необходимой для обращения с микропрепаратом 30 (образцом 302), такой как идентификационный номер предметного стекла 303 и толщина покровного стекла 301, может быть наклеен на предметное стекло 303. Хотя в данном примерном варианте осуществления микропрепарат 30 показан в качестве примера исследуемого объекта, представленного для получения изображения, другие объекты можно использовать в качестве исследуемого объекта.
На фиг.3 показан объектив 40. Объектив 40 представляет собой отображающую оптическую систему для увеличения изображения микропрепарата 30 с заданной кратностью увеличения и формирования изображения на поверхности восприятия изображения устройства 50 формирования изображения. В частности, как показано на фиг.3, объектив 40 включает в себя линзы и зеркала и сконфигурирован для фокусировки изображения объекта, помещенного в предметной плоскости А, на плоскость В изображения.
В данном примерном варианте осуществления объектив 40 расположен так, что микропрепарат 30 является оптически сопряженным с поверхностью восприятия изображения устройства 50 формирования изображения. Объект эквивалентен микропрепарату 30 и плоскость В изображения эквивалентна поверхности восприятия изображения устройства 50 формирования изображения. Предпочтительно, чтобы числовая апертура NA на стороне предметной плоскости объектива 40 была равна 0,7 или больше. Предпочтительно конфигурировать объектив 40 так, чтобы квадратная область микропрепарата размером по меньшей мере 10 мм × 10 мм за один прием отображалась на плоскости изображения.
На фиг.4А представлен вид сверху, иллюстрирующий устройство 50 формирования изображения. Как показано на фиг.4, устройство 50 формирования изображения включает в себя группу 555 датчиков изображения, состоящую из множества датчиков 501 изображения, расположенных в двух измерениях (в матрице) в поле F объектива 40. Датчики 501 изображения сконфигурированы так, что одновременно захватывают изображения множества различных участков микропрепарата 30.
Датчик 501 изображения может быть датчиком на основе прибора с зарядовой связью (ПЗС) или датчиком на основе прибора со структурой металл-оксид-полупроводник (МОП). Количество датчиков 501 изображения, устанавливаемых в устройстве 50 формирования изображения, соответственно определяется площадью поля F объектива 40. Кроме того, компоновка датчиков 501 изображения соответственно определяется формой поля F объектива 40 и формой и конфигурацией датчика 501 изображения.
В данном примерном варианте осуществления для облегчения понимания группа 555 датчиков изображения включает в себя 5×4 датчиков на основе МОП-приборов, расположенных в направлениях X и Y. В случае обычного устройства 50 формирования изображения расположение датчиков 501 изображения без зазоров невозможно, поскольку вокруг поверхности восприятия изображения датчика 501 изображения имеется поверхность подложки. Поэтому изображение, получаемое при одном захвате изображения устройством 50 формирования изображения, включает в себя пустые участки, соответствующие зазорам между датчиками 501 изображения.
В соответствии с этим устройство получения изображения согласно данному примерному варианту осуществления захватывает изображения много раз при перемещении предметного столика 20, то есть при изменении относительного положения микропрепарата 30 и группы 555 датчиков изображения, для заполнения зазоров между датчиками 501 изображения, в результате чего изображение образца 302 получается без пустых участков. Выполнение этой операции при более высокой скорости позволяет захватывать изображение из более широкой области при меньшем времени захвата изображения.
Поскольку устройство 50 формирования изображения расположено на площадке 60 устройства формирования изображения, то вместо перемещения предметного столика 20 можно перемещать площадку 60 устройства формирования изображения, чтобы изменять относительное положение микропрепарата 30 и группы 555 датчиков изображения.
Устройство 50 формирования изображения также включает в себя подвижный блок, состоящий из множества механизмов перемещения. Каждый из механизмов перемещения перемещает поверхность восприятия изображения каждого из датчиков 501 изображения. Датчик изображения 501 будет более конкретно описан ниже с обращением к фиг.4В.
На фиг.4В представлен разрез по линии В-В из фиг.4А. Как показано на фиг.4В, датчик 501 изображения снабжен подложкой 502, электрической схемой 503, крепежным элементом 504, соединительными элементами 505 и подвижными элементами (цилиндрами) 506, соответственно образующими блок 500 формирования изображения. Подвижные элементы 506 расположены на верхней пластине 560. Соединительные элементы 505 и подвижные элементы 506 образуют механизм перемещения. Датчик 501 изображения снабжен тремя соединительными элементами 505 и тремя подвижными элементами 506. (На фиг.4 показаны два из трех соединительных элементов 505 и два из трех подвижных элементов 506.)
Соединительные элементы 505 прикреплены к крепежному элементу 504 и с возможностью поворота центрированы на участке соединения подвижными элементами 506. Следовательно, механизм перемещения сконфигурирован для изменения положения в направлении Z и наклона поверхности восприятия изображения датчика 501 изображения.
Площадка 60 устройства формирования изображения выполнена подвижной в каждом из направлений X, Y и Z и сконфигурирована для регулирования положения группы 555 датчиков изображения. Площадка 60 устройства формирования изображения может поворачиваться вокруг каждой из осей X, Y и Z и сконфигурирована для регулирования наклона и поворота группы 555 датчиков изображения.
Ниже будет описано измерительное устройство 2. Как показано на фиг.1, измерительное устройство 2 включает в себя осветительный блок 70 для освещения микропрепарата 30, блок 80 измерения области существования, предназначенный для измерения области (области существования) микропрепарата 30, в которой находится образец, и блок 90 измерения формы поверхности, предназначенный для измерения формы поверхности микропрепарата 30.
На фиг.5 показано измерительное устройство 2. Как показано на фиг.5, осветительный блок 70 включает в себя источник 701 света, конденсорную линзу 702, пластинку 703 с точечным отверстием, коллиматорную линзу 704, диафрагму 710, поляризующий расщепитель 705 пучка, четвертьволновую пластинку 706 и диафрагму 711. Свет от источника 701 света собирается на точечном отверстии пластинки 703 с точечным отверстием конденсорной линзой 702. Коллиматорная линза 704 придает свету (сферической волне) из точечного отверстия форму параллельного пучка световых лучей (плоской волны).
Параллельный пучок световых лучей проходит через диафрагму 710, отражается поляризующим расщепителем 705 пучка, проходит через четвертьволновую пластинку 706 и диафрагму 711 и входит в микропрепарат 30.
Источник света может быть светодиодным источником света или полупроводниковым лазерным устройством. Пластинка 703 с точечным отверстием сконфигурирована для излучения сферической волны, которую можно считать идеальной сферической волной. Параллельный пучок световых лучей от осветительного блока 70 сконфигурирован для освещения по меньшей мере всей области покровного стекла 301.
На фиг.6 показаны свет Т, проходящий сквозь исследуемый объект 30, и свет R, отражающийся от него. Как показано на фиг.6, падающий свет I (плоская волна), входящий в покровное стекло 301 микропрепарата 30, разделяется на проходящий свет Т, который проходит сквозь микропрепарат 30, и отражающийся свет R, отражающийся на поверхности покровного стекла 301.
Волновой фронт W отражающегося света R искажается в соответствии с волнистостью поверхности покровного стекла 301. В данном примерном варианте осуществления проходящий свет Т входит в блок 80 измерения области существования, а отражающийся свет R проходит через диафрагму 711 и четвертьволновую пластинку 706, проходит через поляризующий расщепитель 705 пучка и входит в блок 90 измерения формы поверхности.
Как показано на фиг.5, блок 80 измерения области существования включает в себя фильтр 801 и камеру 803. Фильтр 801 представляет собой нейтральный фильтр, который регулирует количество света, входящего в камеру 803. Камера 803, например камера на приборах с зарядовой связью, сконфигурирована для захвата изображения по меньшей мере всей области покровного стекла 301.
При использовании лазера в качестве источника 701 света могут образовываться спеклы. В таком случае предпочтительно располагать фазовую пластинку 802 со случайным фазовым сдвигом на оптическом пути проходящего света Т и перемещать (например, поворачивать) фазовую пластинку 802 со случайным фазовым сдвигом путем использования механизма перемещения (непоказанного).
Количество света, который проходит сквозь образец 302, из общего количества света, входящего в камеру 803, меньше, чем количество света, который не проходит сквозь образец 302. Следовательно, область существования образца 302 микропрепарата 30 можно получать при использовании разности контрастов света, который проходит сквозь покровное стекло 301, образец 302 и предметное стекло 303, и света, который проходит сквозь покровное стекло 301 и предметное стекло 303.
Например, информация об изображении, захватываемая камерой 803, вводится в управляющее устройство 3, а управляющее устройство 3 выполняет операцию распознавания области, имеющей яркость, равную заданному пороговому значению L или меньше его, в качестве области существования образца 302.
На фиг.7 показана область Е существования, в которой находится исследуемый объект 30. Как показано на фиг.7, в случае, когда область Е существования задана в виде прямоугольной области, область Е существования, в которой находится образец 302, можно определять путем вычисления значений X1, X2, Y1 и Y2 координат.
Как показано на фиг.5, блок 90 измерения формы поверхности включает в себя регулируемую оптическую систему 901 и датчик 902 волнового фронта для измерения волнового фронта падающего света. Регулируемая оптическая система 901 сконфигурирована так, что микропрепарат 30 оптически сопряжен с датчиком 902 волнового фронта, и сконфигурирована для изменения увеличения изображения.
Хотя в данном примерном варианте осуществления датчик волнового фронта Шака-Гартмана использован в качестве датчика 902 волнового фронта, интерферометр (например интерферометр сдвига) можно использовать вместо датчика волнового фронта Шака-Гартмана, чтобы обнаруживать волновой фронт отражающегося света R.
Использование датчика волнового фронта, способного обнаруживать поверхность покровного стекла 301, позволяет за один прием быстро и точно измерить форму поверхности покровного стекла 301.
Поскольку блок 90 измерения формы поверхности измеряет форму поверхности покровного стекла 301 с использованием света R, отражающегося от поверхности покровного стекла 301, образец 302 и предметное стекло 303 в меньшей степени влияют на результат измерения, чем в случае измерения формы поверхности по пропускаемому свету Т. Следовательно, блок 90 измерения формы поверхности, расположенный так, как показано на фиг.5, позволяет более точно измерять форму поверхности покровного стекла 301.
На фигурах 8А и 8В показан датчик 902 волнового фронта Шака-Гартмана. Как показано на фигурах 8А и 8В, датчик 902 волнового фронта Шака-Гартмана включает в себя линзовую матрицу 912, состоящую из множества расположенных в двух измерениях линз, и детекторную матрицу 922, состоящую из множества расположенных в двух измерениях детекторов.
Линзы из линзовой матрицы 912 разделяют волновой фронт падающего света (отражающегося света R) и направляют части разделенного света на соответствующие детекторы детекторной матрицы 922. Способ измерения формы поверхности с использованием датчика 902 волнового фронта Шака-Гартмана будет описан ниже с обращением к фигурам с 8А по 9В. На фигурах 9А и 9В представлены виды сверху детекторной матрицы 922 датчика 902 волнового фронта Шака-Гартмана. Белым кружком показан центр каждого детектора, а черным кружком показано положение концентрации света на каждом детекторе.
Когда падающий свет имеет плоский волновой фронт W, показанный на фиг.8А, то, как показано на фиг.9А, каждая часть разделенного света собирается точно в центре каждого детектора (на оптической оси каждой линзы). Однако, когда падающий свет имеет искаженный волновой фронт W, показанный на фиг.8В, то, как показано на фиг.9В, положение концентрации падающего света отклоняется от центра каждого детектора в зависимости от наклона каждой части разделенного света. В управляющем устройстве 3 форма волнового фронта падающего света вычисляется на основании измеряемого значения величины сдвига положения концентрации света, а на основании вычисленной формы волнового фронта находится форма поверхности покровного стекла 301.
В данном примерном варианте осуществления пропускаемый свет Т используется блоком 80 измерения области существования и отражающийся свет R используется блоком 90 измерения формы поверхности. Однако, как показано на фиг.10, блок 80 измерения области существования и блок 90 измерения формы поверхности можно менять местами. Это означает, что отражающийся свет R используется блоком 80 измерения области существования, а пропускаемый свет Т используется блоком 90 измерения формы поверхности.
Эта конфигурация является эффективной в случае, когда волнистость волнового фронта, обусловленная формой волнистой поверхности покровного стекла 301, несколько больше, чем волнистость волнового фронта, создаваемая образцом 302 и предметным стеклом 303.
Поскольку количество пропускаемого света Т, проходящего сквозь микропрепарат 30, обычно больше, чем количество отражающегося света R, отражающегося от микропрепарата 30, то эта конфигурация является эффективной в случае, когда датчик 902 волнового фронта имеет низкую чувствительность. На фиг.10 показано измерительное устройство 2а, которое представляет собой вариант измерительного устройства 2.
В случае измерительного устройства 2 и измерительного устройства 2а один из пропускаемого света Т и отражающего света R используется блоком 80 измерения области существования и другой один используется блоком 90 измерения формы поверхности, а свет от осветительного блока 70 распределяется между блоком 80 измерения области существования и блоком 90 измерения формы поверхности. Это позволяет уменьшать размер измерительного устройства и одновременно измерять область существования и форму поверхности при сокращении времени измерений.
Управляющее устройство 3 будет описано ниже. Управляющее устройство 3 включает в себя компьютер, который включает в себя блок центрального процессора (БЦП), запоминающее устройство и жесткий диск. Управляющее устройство 3 управляет микроскопом 1 для захвата изображения микропрепарата 30 и обрабатывает данные об изображении микропрепарата 30, захватываемом микроскопом 1, для создания цифрового изображения.
В частности, управляющее устройство 3 регулирует положения множества захватываемых изображений путем перемещения предметного столика 20 в направлениях X и Y и затем сшивает эти изображения для создания изображения образца 302 без зазоров.
Устройство получения изображения согласно данному примерному варианту осуществления захватывает изображение образца 302 для каждого из красного, зеленого и голубого света от блока источника света. Таким образом, управляющее устройство 3 объединяет данные об этих изображениях для образования цветного изображения образца 302.
Управляющее устройство 3 управляет микроскопом 1 и измерительным устройством 2 так, что микроскоп 1 захватывает изображение микропрепарата 30 на основании результата предварительного измерения микропрепарата 30 измерительным устройством 2. В частности, управляющее устройство 3 определяет область визуализации, захватываемую микроскопом 1, на основании области существования образца 302, получаемой с использованием измерительного устройства 2, и затем микроскоп 1 захватывает изображение только области визуализации.
Это позволяет захватывать изображение только области, необходимой для диагностики патологии. В результате, количество данных о цифровом изображении микропрепарата 30 можно уменьшать, чтобы облегчать обработку данных о цифровом изображении. Обычно область визуализации задают так, чтобы она становилась равной области существования.
Управляющее устройство 3 также вычисляет находящуюся в фокусе плоскость (находящуюся в фокусе криволинейную поверхность) изображения образца 302 на основании формы поверхности покровного стекла 301, получаемой при использовании измерительного устройства 2, и увеличения линзы 40.
На фиг.11 представлен схематичный вид, иллюстрирующий вычисленную, находящуюся в фокусе плоскость. Когда поверхность покровного стекла 301 волнистая, находящаяся в фокусе плоскость образца 302 также является волнистой с образованием криволинейной поверхности. В этом случае, если изображение образца 302 захватывается в состоянии, когда поверхности восприятия изображения группы 555 датчиков изображения находятся в одной и той же плоскости, определенная поверхность восприятия изображения отделяется от находящейся в фокусе плоскости (находящегося в фокусе положения) и не согласуется с глубиной резкости объектива 40.
В результате, участок изображения образца 302, проецируемый на определенную поверхность восприятия изображения, выходит из фокуса и поэтому в устройстве получения изображения будет регистрироваться цифровое изображение, имеющее размытый участок.
В устройстве получения изображения согласно данному примерному варианту осуществления механизм перемещения на основании формы поверхности, измеряемой измерительным устройством 2, перемещает датчики изображения, имеющие поверхности восприятия изображения, отделенные от находящейся в фокусе плоскости, из группы 555 датчиков изображения, чтобы привести поверхности восприятия изображения датчиков изображения близко к находящейся в фокусе плоскости. В этом описании изобретения термин «перемещает» означает изменение положения и/или наклона. В упомянутом выше состоянии устройство получения изображения согласно данному примерному варианту осуществления получает изображение образца 302, чтобы осуществить регистрацию предпочтительного цифрового изображения, имеющего небольшую размытость.
Датчики изображения будут особо описаны ниже с обращением к фигурам с 12А по 13D. На фигурах 12А и 12В показаны датчики изображения, расположенные вдоль оси Yi. На фиг.12А показана находящаяся в фокусе кривая изображения образца 302. На фиг.12В представлен вид сверху, иллюстрирующий группу 555 датчиков изображения.
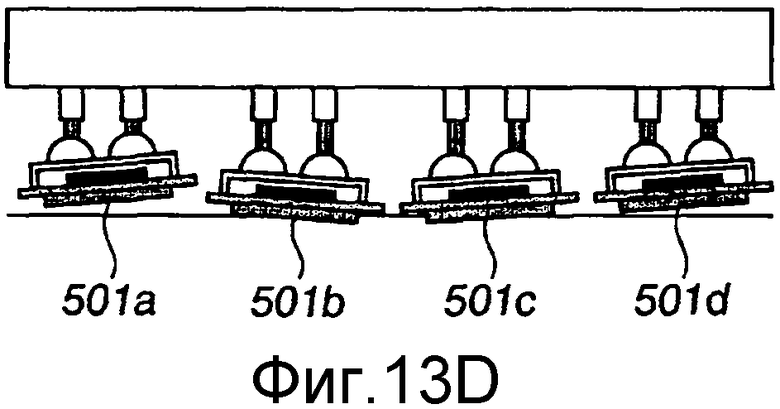
На фигурах с 13А по 13D показан способ перемещения датчиков изображения. На фиг.13А показаны находящаяся в фокусе кривая изображения образца 302 и поверхности восприятия изображения датчиков с 501а по 501d изображения. На фиг.13В представлен разрез, иллюстрирующий устройство 50 формирования изображения. На фиг.13С показаны находящаяся в фокусе кривая изображения образца 302 и поверхности восприятия изображения датчиков с 501а по 501d изображения. На фиг.13D представлен разрез, иллюстрирующий устройство 50 формирования изображения.
Как показано на фиг.12А, находящаяся в фокусе криволинейная поверхность изображения образца 302 образует кривую на разрезе, включающем в себя оси Yi и Zi. Как показано на фиг.12В, четыре датчика с 501а по 501d изображения расположены вдоль оси Yi. Когда поверхности восприятия изображения группы 555 датчиков изображения расположены на оси Yi, поверхность восприятия изображения датчика 501b изображения будет отделена от находящейся в фокусе кривой промежутком ΔZ. Когда промежуток ΔZ большой и поверхность восприятия изображения выходит за пределы глубины резкости, изображение на соответствующем участке становится несфокусированным.
Как показано на фигурах 13А и 13В, для разрешения этой проблемы механизмы перемещения перемещают три датчика 501а, 501b и 501d изображения из числа датчиков с 501а по 501d изображения, то есть изменяют их положения и/или наклоны так, чтобы поверхности восприятия изображения датчиков с 501а по 501d изображения почти совмещались с находящейся в фокусе кривой. Например, на фиг.13В показано состояние, в котором изменены положение в направлении Z и наклон в направлении Z датчиков 501а и 501d изображения и изменено только положение в направлении Z датчика 501b изображения.
Поскольку в исходном состоянии поверхность восприятия изображения датчика 501с изображения согласуется с глубиной резкости, нет необходимости в том, чтобы механизм перемещения перемещал датчик 501с изображения. Что касается фиг.13А, то сплошными линиями на находящихся в фокусе кривых показаны поверхности восприятия изображения датчиков с 501a по 501d изображения (это также распространяется на фиг.13С).
Случай, когда находящаяся в фокусе криволинейная поверхность наклонена, будет описан ниже с обращением к фигурам с 16А по 16С. В этом описании изобретения случай, когда находящаяся в фокусе криволинейная поверхность наклонена, относится к случаю, когда находящаяся в фокусе криволинейная поверхность аппроксимируется ровной плоскостью, при этом ровная плоскость не параллельна плоскости, включающей в себя оси X и Y.
Ниже прежде всего будет описан случай, когда кривая находящейся в фокусе криволинейной поверхности на разрезе, включающем в себя оси Yi и Zi, не параллельна оси Yi. Фиг.16А соответствует фиг.13А. Фиг.16В соответствует фиг.13В. Фиг.16С представляет собой разрез, иллюстрирующий устройство 50b формирования изображения, которое представляет собой вариант устройства 50 формирования изображения.
На фиг.16А показан случай, когда находящаяся в фокусе криволинейная поверхность изображения образца 302 наклонена в соответствии с углом k наклона. В этом случае для приведения поверхностей восприятия датчиков с 501а по 501d изображения близко к находящейся в фокусе криволинейной поверхности, необходимо, как показано на фиг.16В, перемещать датчики с 501а по 501d изображения на большое расстояние.
Однако могут возникать трудности при создании механизмов с 506а по 506d перемещения, предназначенных для перемещения датчиков с 501а по 501d изображения на большое расстояние. В этом случае, как показано на фиг.16С, механизмы перемещения можно разделять на две группы, то есть на первую группу механизмов перемещения (механизмов с 506а по 506d перемещения) и вторую группу механизмов перемещения (механизмов 1600а и 1600b перемещения). Первая группа механизмов перемещения (механизмов с 506а по 506d перемещения) может соответствовать составляющим находящейся в фокусе криволинейной поверхности, а вторая группа механизмов перемещения (механизмов 1600а и 1600b перемещения) может соответствовать наклону находящейся в фокусе криволинейной поверхности.
Механизм 1600а перемещения состоит из соединительных элементов 1605а и подвижных элементов (цилиндров) 1606а и расположен на верхней пластине 1660 (это также распространяется на механизм 1600b перемещения). Вторая группа механизмов перемещения (механизмов 1600а и 1600b перемещения) перемещает группу датчиков изображения (датчиков с 501а по 501d изображения) и первую группу механизмов перемещения (механизмов с 506а по 506d перемещения) для регулирования их наклонов.
Когда угол k наклона находящейся в фокусе криволинейной поверхности минимизирован путем изменения наклона формы поверхности микропрепарата 30, одномерный трансляционный столик 24 предметного столика 20 можно конфигурировать не только для перемещения в направлении Z, но также и в направлениях θx и θy, а наклон микропрепарата 30 можно изменять с помощью Z-столика 24 вместо второй группы механизмов перемещения. Наклон устройства 50 формирования изображения можно изменять с помощью площадки 60 устройства формирования изображения вместо предметного столика 20.
Способ определения угла k наклона будет рассмотрен ниже. Хотя на фиг.16А угол k наклона показан на разрезе, необходимо рассматривать оптимальные углы наклона в двух направлениях (направлениях X и Y), поскольку датчики 501 изображения расположены в двух измерениях.
В соответствии с этим углы наклона датчиков с 501а по 501d изображения необходимо вычислять в предположении, что датчики с 501а по 501d изображения наклонены относительно осей X и Y, центрированных по центру группы 555 датчиков изображения на фиг.12В.
Поэтому положение в направлении Z каждого датчика изображения аппроксимируют линейной функцией при использовании метода наименьших квадратов для получения угла k наклона, а отличие от угла k наклона можно идентифицировать как криволинейную поверхность. После вычисления угла k наклона и криволинейной поверхности предпочтительно, чтобы заданные значения перемещений передавались с управляющего устройства 3 к первой группе механизмов перемещения (механизмов с 506а по 506d перемещения) и второй группе механизмов перемещения (механизмов 1600а и 1600b перемещения) на фиг.16С.
В результате аналогичного применения упомянутого выше управления перемещением поверхностей восприятия изображения к другим 16 датчикам из группы 555 датчиков изображения все поверхности восприятия изображения группы 555 датчиков изображения становятся почти совмещенными с находящейся в фокусе кривой изображения образца 302, а все поверхности восприятия изображения группы 555 датчиков изображения приводятся в соответствие с глубиной резкости. При захвате изображения образца 302 в этом состоянии устройство получения изображения согласно данному примерному варианту осуществления может регистрировать предпочтительное сфокусированное цифровое изображение.
При перемещении предметного столика 20 (или площадки 60 устройства формирования изображения) в направлениях X и Y и повторном захвате изображения образца 302 для заполнения зазоров между датчиками 501 изображения поверхности восприятия изображения датчиков с 501а по 501d изображения будут отделяться от находящейся в фокусе кривой благодаря перемещению предметного столика 20.
Как показано на фигурах 13С и 13D, механизмы перемещения еще раз перемещают датчики 501 изображения в соответствии с перемещением предметного столика 20 (или площадки 60 устройства формирования изображения) в направлениях X и Y, чтобы привести поверхности восприятия изображения датчиков 501 изображения близко к находящейся в фокусе плоскости изображения образца 302.
Когда глубина резкости не такая уж малая, нет необходимости конфигурировать механизмы перемещения для изменения положений наклонов датчиков 501 изображения, а можно конфигурировать, как показано на фиг.14, для изменения только положений датчиков 501 изображения. На фиг.14 показано устройство 50а формирования изображения, которое представляет собой вариант устройства 50 формирования изображения. Как упоминалось выше, поскольку область визуализации определяют заранее, из числа группы 555 датчиков изображения предпочтительно перемещать только датчики изображения, находящиеся в области визуализации.
Устройство 4 отображения, например жидкокристаллический дисплей, используется для отображения рабочих экранов, необходимых для работы устройства 100 получения изображения, или отображения цифрового изображения образца 302, создаваемого управляющим устройством 3.
Работа устройства 100 получения изображения согласно данному примерному варианту осуществления будет описана ниже с обращением к блок-схеме последовательности действий, показанной на фиг.15.
На этапе S10 препарат 30 вынимают из кассеты для микропрепарата и затем помещают на предметный столик 20. После этого предметный столик 20, удерживающий микропрепарат 30, перемещают в измерительное устройство 2. На этапе S20 измерительное устройство 2 измеряет одновременно область существования (область визуализации) на микропрепарате 30, где находится образец 302, и форму поверхности микропрепарата 30. Результаты измерений сохраняются в запоминающем блоке управляющего устройства 3. На этапе S30 предметный столик 20 перемещают из измерительного устройства 2 к микроскопу 1.
В устройстве 100 получения изображения находящаяся в фокусе криволинейная поверхность образца 302 вычисляется на основании формы поверхности, сохраняемой в запоминающем блоке управляющего устройства 3, и увеличения объектива 40. На этапе S40 механизмы перемещения устройства 50 формирования изображения перемещают поверхности восприятия изображения датчиков 501 изображения так, чтобы поверхности восприятия изображения датчиков 501 изображения стали совмещенными с вычисленными, находящимися в фокусе криволинейными поверхностями.
Хотя на фиг.15 показано, что предметный столик 20 перемещают на этапе S30, а механизмы перемещения перемещают датчики 501 изображения на этапе S40, действия этапов S30 и S40 могут выполняться одновременно или в обратном порядке.
На этапах с S50 по S70 в состоянии, в котором поверхности восприятия изображения датчиков 501 изображения совмещены с находящимися в фокусе криволинейными поверхностями, группа 555 датчиков изображения получает изображение образца 302. В частности, в то время как микропрепарат 30 освещается красным (К) светом от осветительного устройства 10, группа 555 датчиков изображения получает красное (К) изображение образца 302.
На этапе S60 устройство 100 получения изображения выбирает зеленый (З) свет в качестве света, излучаемого из осветительного устройства 10, и в то время как микропрепарат 30 освещается зеленым светом, группа 555 датчиков изображения получает зеленое (З) изображение образца 302. На этапе S70 устройство 100 получения изображения выбирает голубой (Г) свет в качестве света, излучаемого из осветительного устройства 10, и в то время как микропрепарат 30 освещается голубым светом, группа 555 датчиков изображения получает голубое (Г) изображение образца 302.
Находящиеся в фокусе криволинейные поверхности образца 302 при красном, зеленом и голубом свете могут отличаться друг от друга из-за влияния хроматической аберрации объектива 40 или влияния формы или толщины покровного стекла 301. В этом случае находящиеся в фокусе криволинейные поверхности образца 302 при красном, зеленом и голубом свете можно вычислять заранее на основании формы поверхности, сохраняемой в запоминающем блоке управляющего устройства 3.
Если поверхности восприятия изображения датчиков 501 изображения не согласуются с глубиной резкости, до получения зеленого изображения и/или до получения голубого изображения предпочтительно изменять положения или угловые ориентации датчиков 501 изображения путем использования соответствующих механизмов перемещения с тем, чтобы поверхности восприятия изображения приводились близко к находящейся в фокусе криволинейной поверхности и соответствовали глубине резкости. В этом случае положения или угловые ориентации датчиков 501 изображения можно изменять путем использования площадки 60 устройства формирования изображения.
На этапе S80 определяют, завершился ли захват изображения в отношении всех частей области визуализации. Если изображения образца 302 в зазорах между датчиками 501 изображения, расположенными в матрице, не получены, то есть захват изображения не завершен в отношении всех частей области визуализации («нет» на этапе S80), устройство 100 получения изображения перемещает предметный столик 20 в направлениях X и Y для изменения относительного положения микропрепарата 30 и устройства 50 формирования изображения. Затем происходит возврат к этапу S40. На этапе S40 механизмы перемещения еще раз перемещают поверхности восприятия изображения датчиков 501 изображения. На этапах с S50 по S70 группа 555 датчиков изображения еще раз получает красное, зеленое и голубое изображения микропрепарата 30, соответственно получает изображения образца 302 в зазорах между датчиками 501 изображения. С другой стороны, если захват изображения завершился в отношении всех частей области визуализации («да» на этапе S80), то процесс заканчивается.
Хотя в данном примерном варианте осуществления устройство 100 формирования изображения изменяет относительное положение микропрепарата 30 и устройства 50 формирования изображения путем перемещения предметного столика 20, площадку 60 устройства формирования изображения можно перемещать вместо предметного столика 20, или можно перемещать предметный столик 20 и площадку 60 устройства формирования изображения. После того как устройство 100 получения изображения повторяет этап S90 перемещения предметного столика 20 в направлениях X и Y, этап S40 перемещения поверхностей восприятия изображения датчиков 501 изображения и этапы с S50 по S70 получения красного, зеленого и синего изображений несколько раз (например три раза), захват изображения завершается в отношении всех частей области визуализации.
Система 100 получения изображения согласно данному примерному варианту осуществления выполняет предварительное измерение формы поверхности микропрепарата 30 с использованием измерительного устройства 2 и затем на основании результата измерения захватывает изображение микропрепарата 30 с использованием микроскопа 1, и тем самым получает и отображает предпочтительное цифровое изображение, имеющее небольшую размытость.
Хотя были конкретно описаны предпочтительные примерные варианты осуществления настоящего изобретения, настоящее изобретение не ограничено ими и может быть модифицировано различными способами в объеме прилагаемой формулы изобретения.
Например, хотя в приведенных выше примерных вариантах осуществления каждый датчик изображения снабжен одним или несколькими механизмами перемещения, конфигурация механизмов перемещения не ограничена этим. Каждые два или большее количество датчиков 501 изображения могут быть снабжены одним или несколькими механизмами перемещения, а положения и/или углы наклона могут регулироваться применительно к двум или большему количеству датчиков 501 изображения.
Хотя в приведенных выше примерных вариантах осуществления каждый датчик изображения снабжен одним или несколькими механизмами перемещения, нет необходимости в том, чтобы каждый датчик изображения был снабжен одним или несколькими механизмами перемещения, если глубина резкости объектива 40 не такая уж малая или если покровное стекло 301 не очень волнистое. В этом случае предпочтительно регулировать за один прием положения в направлении Z или наклоны группы 555 датчиков изображения путем использования площадки 60 устройства формирования изображения и также предпочтительно располагать на оптическом пути объектива 40 оптический элемент для изменения аберрации и перемещать оптический элемент.
Устройство 100 получения изображения захватывает изображение микропрепарата 30 с использованием микроскопа 1 на основании области существования и формы поверхности, измеряемых измерительным устройством 2. Однако, если область существования и форма поверхности известны, нет необходимости снабжать устройство 100 получения изображения измерительным устройством 2.
Например, информация об области существования и форме поверхности может быть записана предпочтительно на маркировочном знаке 333 на микропрепарате 30. В этом случае снабжение микроскопа 1 устройством для считывания маркировочного знака 333 и захват изображения микропрепарата 30 микроскопом 1 на основании считанной информации позволяют получать только микроскопом 1 предпочтительное цифровое изображение, имеющее небольшую размытость.
Хотя в приведенных выше примерных вариантах осуществления использовалась группа 555 датчиков изображения, состоявшая из множества расположенных в двух измерениях датчиков изображения, конфигурация группы 555 датчиков изображения не ограничена этим. Группа 555 датчиков изображения может состоять из множества расположенных в одном или трех измерениях датчиков изображения. Хотя в приведенных выше примерных вариантах осуществления использовались двумерные датчики изображения, вид датчиков изображения не ограничен ими. Могут использоваться одномерные датчики изображения (линейные датчики).
Хотя в приведенных выше примерных вариантах осуществления множество датчиков изображения расположено на одной подложке (верхней пластине), расположение датчиков изображения не ограничено этим. Множество датчиков изображения можно располагать на множестве подложек, если только множество различных участков микропрепарата 30 может быть захвачено одновременно.
Технические элементы, приведенные в описании изобретения или на чертежах, могут иметь техническую значимость сами по себе или в сочетании, а сочетания не ограничены сочетаниями, описанными в представленной формуле изобретения. Техническими приемами, показанными в описании изобретения и на чертежах, можно одновременно решать множество задач, и решение только одной из них имеет техническую значимость.
Хотя настоящее изобретение было описано с обращением к примерным вариантам осуществления, должно быть понятно, что изобретение не ограничено раскрытыми примерными вариантами осуществления. Объем нижеследующей формулы изобретения должен соответствовать самой широкой интерпретации для охвата всех модификаций, эквивалентных структур и функций.
По этой заявке испрашивается преимущество приоритетов заявок на патенты Японии: №2010-243802, поданной 29 октября 2010 года, №2010-243803, поданной 29 октября 2010 года, и №2011-190375, поданной 1 сентября 2011 года, которые полностью включены в эту заявку путем ссылки.



Группа изобретений касается микроскопа, способного получать цифровое изображение, имеющее небольшую размытость даже в случае использования широкоугольного объектива с высокой разрешающей способностью. Устройство включает в себя осветительное устройство, оптическую систему для фокусировки изображения объекта и устройство формирования изображения для захвата изображения объекта. При этом устройство формирования изображения включает в себя множество блоков формирования изображения. Каждый из блоков формирования изображения включает в себя датчик изображения и механизм перемещения для перемещения датчика изображения. 3 н. и 11 з.п. ф-лы, 26 ил.
1. Микроскоп, содержащий:
оптическую систему, сконфигурированную для формирования изображения объекта; и
множество блоков формирования изображения для захвата изображения объекта посредством оптической системы,
при этом каждый из блоков формирования изображения включает в себя датчик изображения и механизм перемещения для перемещения датчика изображения.
2. Микроскоп по п.1, в котором механизм перемещения перемещает датчик изображения так, что поверхность формирования изображения датчика изображения приводится близко к находящейся в фокусе плоскости изображения объекта.
3. Микроскоп по п.1, в котором механизм перемещения перемещает датчик изображения в соответствии с формой поверхности объекта.
4. Микроскоп по п.1, дополнительно содержащий:
столик, сконфигурированный для удержания и перемещения объекта,
при этом механизм перемещения перемещает датчик изображения в соответствии с перемещением столика в направлении, перпендикулярном оптической оси оптической системы.
5. Микроскоп по п.1, дополнительно содержащий группу механизмов перемещения для перемещения блоков формирования изображения.
6. Микроскоп по п.5, в котором группа механизмов перемещения перемещает блоки формирования изображения в соответствии с наклоном находящейся в фокусе поверхности изображения объекта.
7. Микроскоп по п.1, дополнительно содержащий:
столик, сконфигурированный для удержания и перемещения объекта,
причем столик перемещает объект в соответствии с наклоном находящейся в фокусе поверхности изображения объекта.
8. Микроскоп по п.1, в котором множество датчиков изображения сконфигурировано для захвата изображений множества различных участков объекта.
9. Устройство получения изображения, содержащее:
микроскоп по любому из пп.1-8; и
измерительное устройство для измерения формы поверхности объекта,
10. Устройство получения изображения по п.9, в котором механизм перемещения микроскопа перемещает датчик изображения в соответствии с формой поверхности, измеряемой измерительным устройством.
11. Устройство получения изображения по п.9, в котором измерительное устройство измеряет область существования, в которой находится образец объекта, и
при этом микроскоп перемещает датчик изображения для захвата изображения области существования в соответствии с формой поверхности и областью существования, измеряемыми измерительным устройством.
12. Устройство получения изображения по п.11, в котором измерительное устройство включает в себя блок измерения формы поверхности для измерения формы поверхности с использованием света, отражаемого объектом, и блок измерения области существования для измерения области существования с использованием света, проходящего сквозь объект.
13. Устройство получения изображения по п.11, в котором измерительное устройство включает в себя:
осветительный блок для освещения объекта светом;
блок измерения формы поверхности для измерения формы поверхности с использованием одного из света, проходящего сквозь объект, и света, отражаемого объектом; и
блок измерения области существования для измерения области существования с использованием другого одного из света, проходящего сквозь объект, и света, отражаемого объектом.
14. Система получения изображения, содержащая:
устройство получения изображения по п.9; и
устройство отображения, сконфигурированное для отображения изображения объекта, получаемого устройством получения изображения.
| US 2009231689 A1, 17.09.2009 | |||
| JP 2008209627 A1, 11.09.2008 | |||
| US 2009309022 A1, 17.12.2009 | |||
| US 7598502 B2, 06.10.2009 |

