ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящая заявка является частичным продолжением заявки на патент США №11/843,754, озаглавленной "Автофокусировка с предсказанием" и поданной 23 августа 2007 г., которая включена в настоящее описание путем ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
[0002] Варианты осуществления настоящего изобретения относятся к формированию изображений, а именно к автофокусировке с предсказанием в устройстве для формирования изображений.
[0003] Профилактика, наблюдение и лечение таких физиологических состояний, как онкологические, инфекционные заболевания и другие нарушения, требуют своевременной диагностики этих физиологических состояний. Как правило, для анализа и идентификации заболевания используют биологический образец, взятый у пациента. При анализе и оценке упомянутых образцов широко применяют способ микроскопического анализа. В частности, образцы могут быть изучены на предмет наличия аномального количества или аномальных типов клеток и/или организмов, что может указывать на наличие заболевания. Для проведения ускоренного анализа упомянутых образцов были разработаны автоматизированные системы микроскопического анализа, которые имеют повышенную точность, по сравнению с анализом, выполняемым вручную, при котором персонал может со временем испытывать усталость, что может приводить к ошибочной диагностике образцов. Как правило, образцы на предметном стекле загружают в микроскоп. Линза или объектив микроскопа может фокусироваться на конкретной области образца. Затем образец сканируют на предмет одного или более объектов, представляющих интерес. Следует отметить, что первостепенную важность для обеспечения получения высококачественного изображения имеет правильная фокусировка на образце/цели.
[0004] Цифровые оптические микроскопы применяют для исследования множества различных образцов. Быстрая автофокусировка важна в автоматизированных биологических и биомедицинских приложениях, например, в высокопроизводительном скрининге лекарственных препаратов и крупномасштабной манипуляции клетками с использованием автономных микророботов. Быстрая автофокусировка также важна и в других приложениях, например, при техническом контроле интегральных микросхем, а также при микросборке гибридных микроэлектромеханических систем (microelectromechanical systems, MEMS). Таким образом, быстрая автофокусировка крайне востребована в приложениях получения изображений в реальном времени, не допускающих значительных временных задержек при регулировке фокусного расстояния между выполнением снимков образца.
[0005] Традиционные устройства для формирования изображения выполняют автофокусировку путем направления на образец лазерного луча, измерения отраженного от образца лазерного луча для получения одной опорной точки и использования петли обратной связи для регулировки фокусного расстояния. Несмотря на то что такой подход позволяет обеспечить быструю автофокусировку, единственная опорная точка может не предоставлять достаточной информации для точной автофокусировки. В ряде других методов, существующих в настоящее время, автофокусировку выполняют путем получения множества изображений неподвижного образца при множестве фокусных расстояний, определения оптимального фокусного расстояния для каждого из изображений и использования петли обратной связи для регулировки фокусного расстояния. Несмотря на то что такой подход позволяет обеспечить более точную автофокусировку, по сравнению с использованием лазерного луча, получение множества изображений часто приводит к временным задержкам, не позволяющим обеспечить быструю автофокусировку.
[0006] Кроме того, вычисления и регулировки автофокуса могут выполняться во время непрерывного перемещения сканирующего столика для того, чтобы отвечать требованиям скорости сканирования для цифровых слайд-сканеров. В таких случаях некоторые факторы, например, но не ограничиваясь приведенными примерами, повторяющиеся изменения положения, связанные со сканирующим столиком и/или образцом, могут негативно влиять на предсказание фокусного расстояния, что приводит к получению расфокусированных изображений.
[0007] Следовательно, необходимо разработать надежный способ и систему, сконфигурированную для точного выполнения быстрой автофокусировки в приложениях получения изображений в реальном времени, которые позволяют обеспечить повышенную скорость сканирования без ухудшения качества изображения. Кроме того, в приложениях получения изображений в реальном времени необходимы системы, сконфигурированные для учета механических изменений положения при выполнении точной и быстрой автофокусировки.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0008] В соответствии с аспектами настоящего изобретения предложен способ автофокусировки в устройстве для формирования изображений, содержащем объектив и столик для удержания образца, изображение которого необходимо сформировать. Способ включает определение измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения. Также, способ включает формирование изображения первого логического сегмента изображения с использованием упомянутого измеренного значения фокусного расстояния. Способ также включает определение предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием упомянутого измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния. Дополнительно способ включает формирование изображения второго логического сегмента изображения с использованием упомянутого предсказанного значения фокусного расстояния.
[0009] В соответствии с другим аспектом настоящего изобретения предложено устройство для формирования изображений. Устройство включает объектив. Кроме того, устройство включает основной датчик изображений, сконфигурированный для формирования основного изображения образца с частотой смены кадров основного изображения. Также, устройство включает вспомогательный датчик изображений, сконфигурированный для формирования одного или более вспомогательных изображений образца с частотой смены кадров вспомогательного изображения, которая является более высокой, чем частота смены кадров основного изображения. Дополнительно устройство включает контроллер, сконфигурированный для регулировки значения фокусного расстояния между объективом и образцом вдоль оптической оси для автофокусировки изображения образца. Кроме того, устройство включает сканирующий столик для размещения образца и его перемещения по меньшей мере в поперечном направлении, которое по существу ортогонально оптической оси. В устройстве для формирования изображений контроллер сконфигурирован для определения измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения, для получения изображения первого логического сегмента изображения с использованием упомянутого измеренного значения фокусного расстояния, для определения предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием упомянутого измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния, а также для формирования изображения второго логического сегмента изображения с использованием упомянутого предсказанного значения фокусного расстояния.
[0010] В соответствии с еще одним аспектом настоящего изобретения предложено устройство для формирования изображений. Устройство включает объектив, основной датчик изображений, сконфигурированный для формирования основного изображения образца с частотой смены кадров основного изображения, вспомогательный датчик изображений, сконфигурированный для формирования одного или более вспомогательных изображений образца с частотой смены кадров вспомогательного изображения, которая является более высокой, чем частота смены кадров основного изображения, контроллер, сконфигурированный для регулировки значения фокусного расстояния между объективом и образцом вдоль оптической оси для автофокусировки изображения образца, сканирующий столик для размещения образца и его перемещения по меньшей мере в поперечном направлении, которое по существу ортогонально оптической оси. В устройстве для формирования изображений контроллер включает компонент формирования макроизображений и планирования сканирования, предназначенный для определения плана сканирования образца, компонент автофокусировки, предназначенный для получения и обработки вспомогательных изображений, компонент управления перемещением, предназначенный для управления перемещением образца относительно объектива, и компонент синхронизации, предназначенный для синхронизации времени получения вспомогательных изображений, основных изображений или и тех, и других изображений одновременно.
ЧЕРТЕЖИ
[0011] Более глубокое понимание этих, а также других признаков, аспектов и преимуществ настоящего изобретения можно получить, рассмотрев дальнейшее подробное описание, приведенное со ссылками на сопровождающие чертежи, на которых подобные элементы обозначены подобными позициями.
[0012] Фиг.1 представляет собой блок-схему устройства для формирования изображений, например цифрового оптического микроскопа, в соответствии с различными аспектами настоящего изобретения.
[0013] Фиг.2 представляет собой блок-схему алгоритма, иллюстрирующего пример процедуры определения приблизительного значения фокусного расстояния для автофокусировки на образце в соответствии с различными аспектами настоящего изобретения.
[0014] Фиг.3 представляет собой блок-схему алгоритма, иллюстрирующего пример процедуры автофокусировки на образце в соответствии с различными аспектами настоящего изобретения.
[0015] Фиг.4А, 4В представляют собой блок-схемы алгоритмов, иллюстрирующих пример процедуры определения предсказанного значения фокусного расстояния для автофокусировки на образце в соответствии с различными аспектами настоящего изобретения.
[0016] Фиг.5 схематически иллюстрирует способ выбора подмножества общих пикселей в соответствии с различными аспектами настоящего изобретения.
[0017] Фиг.6 схематически иллюстрирует способ автофокусировки на образце в соответствии с различными аспектами настоящего изобретения.
[0018] Фиг.7 схематически иллюстрирует способ определения предсказанного значения фокусного расстояния в соответствии с различными аспектами настоящего изобретения.
[0019] Фиг.8 представляет собой блок-схему, иллюстрирующую еще один способ определения предсказанного значения фокусного расстояния в соответствии с различными аспектами настоящего изобретения.
[0020] Фиг.9 представляет собой блок-схему, иллюстрирующую один из вариантов осуществления контроллера для использования в устройстве для формирования изображений, показанном на фиг.1, в соответствии с различными аспектами настоящего изобретения.
[0021] Фиг.10 представляет собой временную диаграмму, иллюстрирующую аспекты функционирования устройства для формирования изображений, показанного на фиг.1, в соответствии с различными аспектами настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0022] В соответствии с дальнейшим более подробным описанием предложены способ и система для автофокусировки на образце с оптимизацией скорости сканирования и сохранением качества изображения. При применении описанных далее способа и устройства могут быть достигнуты значительное увеличение скорости сканирования и улучшение качества изображений, а также может быть упрощена последовательность клинических операций при сканировании образцов.
[0023] Несмотря на то что примеры осуществления настоящего изобретения, проиллюстрированные далее, описаны в контексте медицинской системы для формирования изображений, следует понимать, что в рамках настоящего изобретения предполагается также использование устройства для формирования изображений в промышленных приложениях.
[0024] Фиг.1 иллюстрирует один из вариантов осуществления устройства 10 для формирования изображений, которое включает различные аспекты настоящего изобретения. В одном из вариантов осуществления изобретения устройство 10 для формирования изображений может представлять собой цифровой оптический микроскоп. В проиллюстрированном на фиг.1 варианте осуществления настоящего изобретения показано, что устройство 10 для формирования изображений включает объектив 12, светоделитель 14, основной датчик 16 изображений, вспомогательный датчик 18 изображений, контроллер 20 и сканирующий столик 22. Также, как показано на фиг.1, образец 24 расположен между покровным стеклом 26 и предметным стеклом 28, при этом образец 24, покровное стекло 26 и предметное стекло 28 расположены на сканирующем столике 22. Покровное стекло 26 и предметное стекло 28 могут быть выполнены из прозрачного материала, например стекла, тогда как образец 24 может представлять собой множество различных объектов или образцов. Например, образец 24 может представлять собой промышленные объекты, например интегральные микросхемы, или микроэлектромеханические системы (microelectromechanical system, MEMS), или биологические образцы, например, взятые при биопсии ткани, включающие клетки печени или почек.
[0025] Светоделитель 14 сконфигурирован для разделения света 30 от образца 24 на основной путь 32 света и вспомогательный путь 34 света. Основной путь 32 света направлен на основной датчик 16 изображений, а вспомогательный путь 34 света направлен на вспомогательный датчик 18 изображений. В одном из вариантов осуществления настоящего изобретения светоделитель 14 может представлять собой фильтр с частичным отражением (или частично прозрачное зеркало), который пропускает одну половину света 30 по основному пути 32 света и отражает вторую половину света 30 по вспомогательному пути 34 света, при использовании способа формирования изображений в светлом поле. Также, в одном из вариантов осуществления настоящего изобретения, светоделитель 14 может представлять сбой фильтр с селекцией по длинам волн (или дихроичное зеркало), который пропускает свет с длиной волны флуоресцентного возбуждения по основному пути 32 света и отражает остальной свет, кроме длины волны флуоресцентного возбуждения, по вспомогательному пути 34 света, при использовании флуоресцентного способа формирования изображений.
[0026] В одном из вариантов осуществления настоящего изобретения основной датчик 16 изображений может формировать основное изображение образца 24 в определенном поле зрения с использованием основного пути 32 света и без использования вспомогательного пути 34 света. При этом вспомогательный датчик 18 изображений может формировать вспомогательное изображение образца 24 в том же поле зрения, или в рассматриваемой области (областях), в упомянутом поле зрения, с использованием вспомогательного пути 34 света и без использования основного пути 32 света. В одном из вариантов осуществления настоящего изобретения основной датчик 16 изображений формирует основное изображение с определенным количеством пикселей и определенной частотой смены кадров, а вспомогательный датчик 18 изображений формирует вспомогательное изображение (изображения) с определенным количеством пикселей и определенной частотой смены кадров. В одном из вариантов осуществления настоящего изобретения количество пикселей вспомогательного изображения существенно меньше количества пикселей основного изображения, и как результат, частота смены кадров вспомогательного изображения существенно выше, чем частота смены кадров основного изображения.
[0027] Основной датчик 16 изображений может представлять собой любое цифровое устройство для формирования изображений, например, доступный для приобретения датчик изображений на основе прибора с зарядовой связью (ПЗС). Аналогично, вспомогательный датчик 18 изображений может также представлять собой доступный для приобретения датчик изображений на основе ПЗС. В одном из вариантов осуществления настоящего изобретения количество основных пикселей может превышать количество вспомогательных пикселей по меньшей мере в четыре раза, а частота смены кадров вспомогательного изображения может превышать частоту смену кадров основного изображения в четыре раза. Кроме того, в одном из вариантов осуществления настоящего изобретения, количество основных пикселей может превышать количество вспомогательных пикселей по меньшей мере в десять раз, а частота смены кадров вспомогательного изображения может превышать частоту смены кадров основного изображения в десять раз.
[0028] В соответствии с примерами аспектов настоящего изобретения предсказание значения фокусного расстояния для следующего логического сегмента изображения может быть основано на ближайших измеренных значениях фокусного расстояния в сочетании с информацией о предсказуемых изменениях положения, связанных с устройством 10 для формирования изображений. Вспомогательный датчик 18 изображений может быть сконфигурирован для обеспечения получения вспомогательных изображений, при этом множество вспомогательных изображений может быть использовано для предсказания значения фокусного расстояния для следующего логического сегмента изображения. Основной датчик 16 изображений может затем получить основное изображение, соответствующее следующему логическому сегменту изображения, с использованием предсказанного значения фокусного расстояния.
[0029] Объектив 12 отстоит от образца 24 на расстояние, отмеряемое вдоль оптической оси в направлении Z (вертикальном), при этом фокальная плоскость объектива 12 лежит в плоскости X-Y (поперечное или горизонтальное направление), которая по существу ортогональна Z, или вертикальному направлению. При этом объектив 12 собирает свет 30, исходящий от образца 24 в определенном поле зрения, усиливает свет 30 и направляет свет 30 на светоделитель 14. Объектив 12 может иметь различное увеличение в зависимости, например, от применения или геометрических размеров образца, изображение которого необходимо получить.
[0030] Также, в одном из вариантов осуществления настоящего изобретения объектив может представлять собой объектив с высоким увеличением, обеспечивающим двадцатикратное (20×) или более увеличение и числовую апертуру, равную 0,5 (малую глубину резкости). Объектив 12 может находиться от образца 24 на фокусном расстоянии, равном нескольким миллиметрам (также называемым рабочим расстоянием) и может собирать свет в поле зрения, составляющем 750×750 мкм в фокальной плоскости. Однако рабочее расстояние, поле зрения и фокальная плоскость могут также изменяться в зависимости от конфигурации микроскопа или характеристик образца 24, изображение которого необходимо получить. В одном из вариантов осуществления изобретения объектив 12 может быть связан с контроллером положения, например, пьезодвигателем, для обеспечения точного управления передвижением и быстрой регулировки малого поля зрения для объектива 12.
[0031] В одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений может представлять собой высокоскоростное устройство для формирования изображений, сконфигурированное для быстрого захвата большого количества основных цифровых изображений образца 24, при этом каждое основное изображение представляет собой снимок образца 24 в конкретном поле зрения, представляющем лишь фрагмент всего образца. Все упомянутые основные цифровые изображения затем могут быть цифровым образом объединены или "сшиты" вместе с целью формирования цифрового представления всего образца 24. Перед сканированием изображения может быть применен процессор для разделения образца 24 на некоторое количество логических сегментов изображения, представляющих собой захватываемые основные цифровые изображения. Процессор может затем определять наиболее эффективный порядок захвата основных цифровых изображений на основе отношения и взаимного расположения логических сегментов изображения. Этот процесс определения порядка сканирования образца часто называют "планированием сканирования".
[0032] В соответствии с одним из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений может захватывать первое, второе и третье вспомогательные изображения образца 24 с использованием вспомогательного датчика 18 изображений, когда образец 24, соответственно, расположен на первом, втором и третьем расстоянии до образца и в первом, втором и третьем поперечном и/или горизонтальном положении. Выражение "расстояние до образца" использовано в настоящем описании для обозначения расстояния между объективом и образцом, изображение которого необходимо получить. Контроллер 20 может вертикально сдвигать объектив 12 относительно образца 24 в направлении Z для получения множества вспомогательных изображений при множестве различных расстояний до образца. Например, контроллер 20 может вертикально сдвигать объектив 12, в то время как сканирующий столик 22 и образец остаются в неизменном положении по вертикали. Альтернативно, контроллер 20 может вертикально сдвигать сканирующий столик 22 и образец 24, в то время как объектив 12 остается в неизменном положении по вертикали, или контроллер 20 может смещать по вертикали одновременно и сканирующий столик 22 (с образцом 24), и объектив 12. В одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений определяет количественную характеристику для соответствующих вспомогательных изображений образца 24, захваченных на множестве различных расстояний до образца. Упомянутая количественная характеристика представляет собой количественную меру качества изображения и может также называться количественным показателем качества. В одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений может определять основное расстояние до образца по меньшей мере на основе количественных характеристик, определяемых для множества вспомогательных изображений. В свою очередь, контроллер 20 может регулировать расстояние между объективом 12 и основным датчиком 16 изображений и устанавливать его равным определяемому основному расстоянию до образца, при этом основной датчик 16 изображений может захватывать следующее основное изображение. В соответствии с дальнейшим более подробным описанием, предсказуемая информация об изменении фокусного расстояния также может использоваться для определения основного значения фокусного расстояния для следующего основного изображения. Основное изображение образца для заданного поля зрения может быть захвачено с использованием основного датчика 16 изображений при предсказанном основном значении фокусного расстояния и в основном поперечном положении, которое смещено относительно первого, второго и третьего поперечных положений. Путем использования комбинации основного датчика 16 изображений и связанного с ним вспомогательного датчика 18 изображений с более высокой частотой смены кадров может быть увеличена общая скорость захвата изображений всего образца 24. Основные изображения, получаемые таким образом, могут храниться в репозитории 36 данных.
[0033] В одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений может быть сконфигурировано для автофокусировки на образце на основе измеренного значения фокусного расстояния в соответствии с множеством логических сегментов изображения и предсказуемыми параметрами изменения фокусного расстояния. В рассматриваемой конфигурации контроллер 20 может быть сконфигурирован для определения измеряемого значения фокусного расстояния по меньшей мере для первого из множества логических сегментов изображения и для определения предсказуемых значений фокусного расстояния для одного или более последующих логических сегментов изображения на основе измеренного значения фокусного расстояния, соответствующего первому логическому сегменту изображения и любым хранимым параметрам изменения фокусного расстояния. Функционирование контроллера 20 будет описано более подробно со ссылками на фиг.2-10.
[0034] В соответствии с примерами аспектов настоящего изобретения, информация о предсказуемом или повторяющемся изменении фокусного расстояния, связанная с устройством 10 для формирования изображений или предметным стеклом 28, может быть использована в сочетании с измеренными значениями фокусного расстояния, соответствующими текущему логическому сегменту изображения, для обеспечения улучшенного предсказания значений фокусного расстояния для следующих сканируемых логических сегментов изображения. В соответствии с этим, может быть получена информация о предсказуемых изменениях фокусного расстояния, связанная с устройством 10 для формирования изображений, а именно со сканирующим столиком 22 и/или с предметным стеклом 28 с расположенным на них образцом 24. В одном из вариантов осуществления настоящего изобретения информация о повторяющемся изменении положения сканирующего столика и/или предметного стекла 28 может быть определена путем сканирования множества предметных стекол и записи вычисленных значений фокусного расстояния в различных положениях. Следует отметить, что в некоторых вариантах осуществления настоящего изобретения определение информации о повторяющихся изменениях положения может выполняться техническим персоналом вручную. Альтернативно, управляющее программное обеспечение может быть сконфигурировано для автоматического накопления упомянутой информации в штатном режиме работы и, таким образом, "обучено" точно предсказывать фокус в различных положениях. В некоторых других вариантах осуществления изобретения повторяющиеся изменения положения, связанные со сканирующим столиком 22 и/или предметным стеклом 28, могут быть определены с использованием калибровочного предметного стекла или других измерительных устройств. Информация о повторяющихся изменениях фокусного расстояния, например колебания или наклон, соответствующая сканирующему столику 22, может быть получена для каждого поперечного и горизонтального положения (x, y) сканирующего столика 22. В дополнение, для множества различных предметных стекол может быть получена информация о повторяющихся изменениях положения для предметного стекла 28, например наклоне предметного стекла 28. Кроме того, информация о повторяющихся изменениях положения для сканирующего столика 22 и/или предметного стекла 28, соответствующая каждому поперечному и горизонтальному положению (x, y), может храниться в виде параметров изменения фокусного расстояния, например, в репозитории 36 данных.
[0035] На фиг.2 изображена блок-схема алгоритма 40, иллюстрирующая пример способа подготовки образца к высокоскоростному сканированию. Способ начинается на шаге 42, на котором предметное стекло с образцом загружают в устройство для формирования изображений. Для примера, предметное стекло 28 с образцом 24 может быть установлено на сканирующий столик 22 устройства 10 для формирования изображений (см. фиг.1). В дополнение, предметное стекло 28 может идентифицироваться или определяться иным образом как принадлежащее к определенному типу предметных стекол. Идентификация предметного стекла может осуществляться вручную, однако идентификация предметного стекла может также осуществляться автоматически устройством 10 для формирования изображений на основе идентифицируемых отметок или характеристик предметного стекла. Упомянутая идентификация типа предметного стекла, например, может обеспечивать последующее извлечение из репозитория данных любых хранимых параметров изменения фокусного расстояния, связанных с идентифицированным типом предметного стекла.
[0036] Далее, на шаге 44, может быть получено макроизображение всего образца 24, и затем упомянутое макроизображение может быть сегментировано на множество логических сегментов изображения на шаге 46. Как упоминалось ранее, логические сегменты изображения представляют собой части макроизображения, которые затем с помощью компьютерной обработки сшивают или объединяют вместе по существу в соответствии с частями образца, изображение которого получают. Каждый логический сегмент изображения может являться смежным для одного или более других логических сегментов изображения, однако это требование не является обязательным. Кроме того, логические сегменты изображения могут немного накладываться на один или более соседних сегментов изображения, например, для упрощения сшивания изображения. Также, логические сегменты изображения могут иметь форму различных геометрических фигур, включая форму круга или шестигранника, однако наиболее часто применяют квадратные или прямоугольные сегменты изображения. Упомянутые логические сегменты изображения часто называют мозаичными элементами изображения. Процедура сегментирования макроизображения образца на множество логических сегментов изображения может выполняться как часть процедуры планирования сканирования.
[0037] Кроме того, в соответствии с описанием шага 48, позиция для выполнения грубой фокусировки, соответствующая области образца 24, может быть определена на основе получаемого макроизображения. Затем объектив, например объектив 12, может быть помещен относительно образца на фокусном расстоянии, соответствующем упомянутому приблизительному значению фокусного расстояния, в соответствии с описанием шага 50. Дополнительно, на шаге 50, может быть определено приблизительное значение фокусного расстояния. В одном из вариантов осуществления настоящего изобретения упомянутое приблизительное значение фокусного расстояния может быть определено путем получения множества изображений при одновременном изменении расстояния до образца, вычислении количественных характеристик (показателей качества) для каждого расстояния и определения наилучшего расстояния до образца для оптимизации упомянутых количественных характеристик. Кроме того, в одном из вариантов осуществления настоящего изобретения количество изображений, получаемых при одновременном изменении расстояния до образца, может находиться в диапазоне приблизительно от 10 до 50. Могут быть вычислены количественные характеристики, соответствующие каждому изображению. Затем могут быть идентифицированы три "лучшие" количественные характеристики. А именно, в одном из вариантов осуществления настоящего изобретения может быть идентифицирована количественная характеристика с максимальным значением. В дополнение, могут также быть идентифицированы две другие количественные характеристики, находящиеся рядом с упомянутой количественной характеристикой с максимальным значением. В одном из вариантов осуществления настоящего изобретения могут быть выбраны две находящиеся рядом количественные характеристики, расположенные по обе стороны от упомянутой количественной характеристики с максимальным значением. По трем идентифицированным "лучшим" количественным характеристикам может быть аппроксимирована унимодальная функция, при этом может быть определена мода упомянутой унимодальной функции. В одном из вариантов осуществления настоящего изобретения унимодальная функция может включать распределение Лоренца или квадратичное распределение. Также, в одном из вариантов осуществления настоящего изобретения мода функции может включать вершину унимодальной функции. Приблизительное значение фокусного расстояния может быть определено на основе идентифицированной моды или вершины унимодальной функции. Тем не менее, для определения приблизительного значения фокусного расстояния могут использоваться и другие методы. Это приблизительное значение фокусного расстояния может затем быть использовано как начальное значение фокусного расстояния для процесса сканирования. Упомянутое приблизительное значение фокусного расстояния может храниться в репозитории 36 данных для дальнейшего использования.
[0038] Фиг.3 представляет собой блок-схему алгоритма 60, иллюстрирующую пример способа автофокусировки во время процедуры высокоскоростного сканирования изображения в соответствии с аспектами настоящего изобретения. В частности, представлен способ автофокусировки на образце, расположенном на сканирующем столике устройства для формирования изображений. Как отмечалось ранее, предметное стекло, например предметное стекло 28, содержащее образец 24, может быть установлено на сканирующий столик 22 устройства 10 для формирования изображений (см. фиг.1). Также объектив 12 может быть расположен на расстоянии до образца, соответствующем приблизительному значению фокусного расстояния для первого логического сегмента изображения в образце 24.
[0039] Способ начинается на шаге 62, на котором определяют измеренное приблизительное значение фокусного расстояния, соответствующее по меньшей мере первому из множества логических сегментов сканируемого изображения. Шаг 62 можно лучше понять, если обратиться к фиг.4, где изображена блок-схема алгоритма 80, иллюстрирующая пример способа определения измеренного значения фокусного расстояния, соответствующего первому логическому сегменту изображения. Способ, показанный на фиг.4, начинается на шаге 82, на котором объектив помещают при первом значении фокусного расстояния, соответствующем первому сканируемому логическому сегменту изображения. В одном из вариантов осуществления настоящего изобретения первое значение фокусного расстояния может соответствовать приблизительному значению фокусного расстояния, определенному на шаге 48 в соответствии с фиг.2. Кроме того, данные изображения могут быть получены с помощью основного датчика 16 изображений (см. фиг.1) при помещении объектива 12 при первом значении фокусного расстояния, соответствующем первому сканируемому логическому сегменту изображения.
[0040] Затем для обеспечения автофокусировки может быть получено множество вспомогательных изображений образца 24 при различных значениях фокусного расстояния. В одном из вариантов осуществления изобретения могут быть получены по меньшей мере три вспомогательных изображения образца 24. Устройство 10 для формирования изображений, а именно вспомогательный датчик 18 изображений (см. фиг.1) может захватывать первое вспомогательное изображение при первом значении фокусного расстояния (шаг 84), второе вспомогательное изображение при втором значении фокусного расстояния (шаг 86) и третье вспомогательное изображение при третьем значении фокусного расстояния (шаг 88). В одном из вариантов осуществления настоящего изобретения расстояние между образцом 24 и объективом 12 может изменяться для каждого вспомогательного изображения, что приводит к получению изображений при различных значениях фокусного расстояния.
[0041] Кроме того, в одном из вариантов осуществления настоящего изобретения контроллер 20 (см. фиг.1) может управлять перемещением объектива 12 в направлении Z для обеспечения получения трех упомянутых вспомогательных изображений. А именно, контроллер 20 может осуществлять связь с модулем управления положением или контроллером положения, сконфигурированным для перемещения объектива 12 в направлении Z, для каждого из упомянутых первого, второго и третьего значений фокусного расстояния для получения первого, второго и третьего вспомогательных изображений, соответственно. В одном из вариантов осуществления настоящего изобретения контроллер положения может представлять собой пьезодвигатель, соединенный с объективом 12.
[0042] Однако хотя первое, второе и третье вспомогательные изображения получают через объектив 12, предметное стекло 28, установленное на сканирующем столике 22 перемещается в направлении (например, направлении X-Y), которое по существу перпендикулярно направлению перемещения (например, направлению Z) объектива 12. Соответственно, сканируемое содержимое изменяется при движении предметного стекла 28 вместе со сканирующим столиком 22. Следовательно, содержимое изображения в поле зрения объектива 12 изменяется при получении каждого из трех упомянутых вспомогательных изображений. Следовательно, необходимо выполнять смещение рассматриваемой области на заданное расстояние для поддержания по существу идентичного содержимого изображения в поле зрения, соответствующем трем упомянутым вспомогательным изображениям. В соответствии с этим, как указано на шаге 90, рассматриваемые области, связанные с тремя упомянутыми вспомогательными изображениями, могут быть смещены на заданное расстояние для идентификации содержимого изображения, общего для всех трех вспомогательных изображений. В одном из вариантов осуществления настоящего изобретения значение упомянутого смещения может быть определено на основе скорости сканирующего столика 22. Путем смещения рассматриваемой области, связанной с тремя вспомогательными изображениями, может быть выбран набор с наибольшим количеством данных (содержимого изображения), общий для всех трех вспомогательных изображений.
[0043] Шаг 90 можно пояснить, обратившись к фиг.5. На фиг.5 показана схематическая иллюстрация 110 способа смещения рассматриваемой области, связанной с тремя вспомогательными изображениями. Числовое обозначение 112 может представлять первое вспомогательное изображение, полученное при первом значении фокусного расстояния, при этом второе вспомогательное изображение, полученное при втором значении фокусного расстояния, может быть представлено числовым обозначением 114. При этом числовое обозначение 116 может в общем случае представлять третье вспомогательное изображение, полученное при третьем значении фокусного расстояния.
[0044] Как показано на фиг.5, содержимое изображения в каждом из трех вспомогательных изображений 112, 114, 116 изменяется вследствие поперечного или горизонтального перемещения образца 24 относительно объектива 12. Как отмечалось ранее, для обработки по существу идентичного набора данных изображения, соответствующих трем упомянутым вспомогательным изображениям, необходимо сместить рассматриваемую область изображения на заданное расстояние для каждого из трех вспомогательных изображений 112, 114, 116.
[0045] В настоящем примере рассматриваемая область, соответствующая первому вспомогательному изображению 112, представлена числовым обозначением 118. Кроме того, вследствие перемещения при сканировании между получением первого вспомогательного изображения 112 и второго вспомогательного изображения 114, содержимое изображения для второго вспомогательного изображения 114, соответствующее рассматриваемой области 118, отличается от содержимого первого вспомогательного изображения 112, соответствующего той же рассматриваемой области 118. В соответствии с аспектами настоящего изобретения рассматриваемая область 118 может быть смещена на заданное расстояние для обеспечения выбора содержимого изображения во втором вспомогательном изображении 114 так, чтобы оно было по существу идентично содержимому первого вспомогательного изображения, соответствующего рассматриваемой области 118. Числовое обозначение 120 может в общем случае представлять собой смещенную рассматриваемую область, которая связана со вторым вспомогательным изображением 114. Аналогичным образом, для третьего вспомогательного изображения 116 может быть сформирована смещенная рассматриваемая область для обеспечения возможности выбора содержимого изображения, по существу идентичного содержимому изображения в рассматриваемых областях 118 и 120. Числовое обозначение 122 может в общем случае представлять смещенную рассматриваемую область, которая связана с третьим вспомогательным изображением 116. В одном из вариантов осуществления настоящего изобретения путем смещения рассматриваемой области для каждого из вспомогательных изображений может быть выбрано наибольшее подмножество данных изображения, которые являются общими для упомянутых трех вспомогательных изображений 112, 114 и 116.
[0046] В соответствии с фиг.4, после шага 90 могут быть вычислены количественные характеристики, связанные с каждым из трех вспомогательных изображений, как показано на шаге 92. А именно, могут быть вычислены количественные характеристики, соответствующие каждому из трех вспомогательных изображений 112, 114, 116 с использованием выбранного содержимого изображения, соответствующего рассматриваемым областям 118, 120 и 122 (см. фиг.5). В соответствии с этим, количественные характеристики могут быть вычислены по области, которая сдвигается синхронно с перемещением при сканировании, так что при каждом фокусном расстоянии оценивается одна и та же область. В одном из вариантов осуществления настоящего изобретения контроллер 20 может быть сконфигурирован для обеспечения определения количественных характеристик, соответствующих каждому из трех вспомогательных изображений 112, 114, 116.
[0047] В соответствии с одним из вариантов осуществления настоящего изобретения, устройство 10 для формирования изображений может использовать упомянутые количественные характеристики как часть одного или более алгоритмов фокусировки в качестве основы для обеспечения фокусировки на образце 24. Кроме того, упомянутые количественные характеристики могут иметь максимальное значение при оптимальном значении фокусного расстояния и меньшее значение при уменьшении фокусного расстояния или, альтернативно, минимальное значение при оптимальном значении фокусного расстояния и большее значение при уменьшении фокусного расстояния. Алгоритмы фокусировки, в которых используют количественные характеристики на основе производных, предполагают, что хорошо сфокусированное изображение имеет более высокочастотное содержание, чем расфокусированное изображение. Алгоритмы фокусировки, в которых используют статистические количественные характеристики, отличают фокусированные изображения от расфокусированных изображений с использованием дисперсии и корреляции. Также алгоритмы фокусировки, в которых используют количественные характеристики на основе гистограмм, используют гистограммы (количество пикселей с заданной яркостью в изображении) для анализа распределения и частоты яркостей изображения. Алгоритмы фокусировки, в которых используют интуитивные количественные характеристики, суммируют яркости пикселей, превышающие порог. Таким образом, количественные характеристики могут быть основаны на различных характеристиках изображения, включая (но не ограничивая изобретение приведенными примерами) контраст, энтропию, дисперсию, пространственный частотный спектр, автокорреляцию и общую яркость изображения. Кроме того, наилучшие количественные характеристики могут зависеть от режима формирования изображения. Например, нормализованная дисперсия может обеспечивать наилучшие общие характеристики для способов формирования изображений в ярком поле, фазового контраста и дифференциального интерференционного контраста, а автокорреляция может обеспечивать наилучшие общие характеристики для флуоресцентного способа формирования изображений. Аналогично, для получения дифференциальной количественной характеристики - градиента Бреннера (Brenner) - вычисляют первую разность между пикселем и соседним пикселем, находящимся на расстоянии по вертикали/горизонтали, равном двум, при этом такой способ наилучшим образом подходит, например, для способа формирования изображений на просвет в ярком поле.
[0048] После определения количественных характеристик, соответствующих трем вспомогательным изображениям 112, 114, 116, эти количественные характеристики могут быть интерполированы для определения измеренного значения фокусного расстояния, в соответствии с описанием шага 94. А именно, в одном из вариантов осуществления настоящего изобретения количественные характеристики могут быть интерполированы путем аппроксимации количественных характеристик унимодальной функцией для обеспечения определения измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения. Упомянутая унимодальная функция может включать распределение Лоренца, параболическое распределение и т.п.
[0049] В одном из вариантов осуществления изобретения устройство 10 для формирования изображений может определять оптимальное значение фокусного расстояния для получения основного изображения, соответствующего текущему логическому сегменту изображения, на основе количественных характеристик, связанных со вспомогательными изображениями 112, 114, 116. Например, устройство 10 для формирования изображений может выбирать оптимальное значение фокусного расстояния на основе максимальной количественной характеристики вспомогательных изображений, на основе интерполяции оптимального значения фокусного расстояния с использованием количественных характеристик вспомогательных изображений или с помощью аппроксимации по меньшей мере трех количественных характеристик унимодальной функцией или функцией распределения и интерполяции оптимального значения фокусного расстояния на основе упомянутой унимодальной функции или функции распределения. В одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений использует градиент Бреннера с n=2 для определения соответствующих количественных характеристик одного или более вспомогательных изображений. При этом в одном из вариантов осуществления настоящего изобретения устройство 10 для формирования изображений может интерполировать оптимальное значение фокусного расстояния для текущего логического сегмента изображения с использованием количественных характеристик для трех вспомогательных изображений как соответствующих распределению Лоренца. В другом варианте осуществления настоящего изобретения устройство 10 формирования изображений может интерполировать оптимальное значение фокусного расстояния для текущего логического сегмента изображения путем распознавания того, что значения фокусного расстояния как функции положения образца 24 являются локально квадратичными, и использования параболической интерполяции.
[0050] В соответствии с одним из аспектов настоящего изобретения, было выяснено, что связь между градиентами Бреннера для последовательности изображений и соответствующим расстоянием от фокуса для этих изображений может быть аппроксимирована с помощью распределения Лоренца. Дополнительно, в соответствии с одним из вариантов осуществления настоящего изобретения также было определено, что аппроксимация квадратичным распределением может быть получена из кривой обратных градиентов Бреннера для последовательности изображений относительно соответствующего положения образца 24. Также было найдено, что оптимальное значение фокусного расстояния для получения сфокусированного изображения соответствует минимуму упомянутого квадратичного распределения. Соответственно, на шаге 96, может быть идентифицирована мода унимодальной функции. Следует отметить, что в некоторых вариантах осуществления настоящего изобретения мода унимодальной функции может включать вершину унимодальной функции. Также, в одном из вариантов осуществления настоящего изобретения мода кривой может представлять собой минимум, тогда как в других вариантах осуществления настоящего изобретения мода унимодальной функции может представлять собой максимум.
[0051] Дополнительно, в соответствии с одним из аспектов настоящего изобретения было также определено, что градиент Бреннера вблизи наилучшего фокуса хорошо аппроксимируется квадратичной функцией положения образца 24. Кроме того, было обнаружено, что оптимальное значение фокусного расстояния для получения сфокусированного изображения соответствует максимуму упомянутого квадратичного распределения. В соответствии с этим на шаге 26 может быть идентифицирована вершина результирующей параболы. Как и раньше, значение вершины может быть использовано для определения измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения.
[0052] Значение моды может быть использовано для определения измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, как показано на шаге 98. В частности, на шаге 98 измеренное фокусное значения для текущего логического сегмента изображения может быть определено на основе значения моды, идентифицированного на шаге 96.
[0053] В соответствии с примерами аспектов настоящего изобретения, информация о предсказуемых изменениях фокусного расстояния может быть использована в сочетании с измеренным значением фокусного расстояния, соответствующим текущему логическому сегменту изображения, для предсказания оптимального значения фокусного расстояния для последующего логического сегмента изображения. Информация о предсказуемых изменениях фокусного расстояния, соответствующая следующему логическому сегменту изображения, который необходимо сканировать, может быть извлечена или, в других случаях, определена в соответствии с описанием шага 100. В одном из вариантов осуществления настоящего изобретения хранимые параметры изменения фокусного расстояния, которые представляют собой информацию о предсказуемых изменениях фокусного расстояния, связанную со сканирующим столиком 22 и/или с предметным стеклом 28, могут быть извлечены, например, из репозитория 36 данных (см. фиг.1). В одном из примеров хранимые параметры изменения фокусного расстояния, связанные со следующим положением (например, положением (x, y)) сканирующего столика 22 и/или предметного стекла 28, могут извлекаться из репозитория 36 данных.
[0054] Также, как отмечалось ранее, оптимальное значение фокусного расстояния для каждого сканируемого логического сегмента изображения может быть предсказано на основе по меньшей мере измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, и любых соответствующих хранимых параметров изменения фокусного расстояния. В соответствии с этим на шаге 102 оптимальное значение фокусного расстояния для следующего из оставшихся для сканирования логических сегментов изображения может быть предсказано на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, и любых соответствующих хранимых параметров изменения фокусного расстояния. Например, на шаге 102 предсказанное значение фокусного расстояния для следующего логического сегмента изображения может быть определено на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, определенному на шаге 98, и любых соответствующих хранимых параметров изменения фокусного расстояния, извлеченных на шаге 100. Также хранимые параметры изменения фокусного расстояния, связанные со сканирующим столиком 22, могут включать определенную ранее информацию о колебаниях и/или наклоне, связанную со сканирующим столиком 22, или повторяющиеся характеристики предметного стекла 28.
[0055] Затем, на шаге 104, объектив 112 может быть помещен на расстоянии до образца, соответствующем предсказанному значению фокусного расстояния, для обеспечения получения данных изображения в следующем логическом сегменте изображения. Дополнительно, данные изображения, или основное изображение, могут быть получены в следующем логическом сегменте изображения, в то время как объектив расположен на расстоянии до образца, соответствующем упомянутому предсказанному значению фокусного расстояния.
[0056] На шаге 64, показанном на фиг.3, может быть сформировано изображение первого логического сегмента изображения с использованием измеренного приблизительного значения фокусного расстояния, соответствующего первому логическому сегменту изображения. А именно, основной датчик 16 изображений (см. фиг.1) может захватывать первое основное изображение, соответствующее первому логическому сегменту изображения, в то время как объектив 12 расположен на расстоянии до образца, соответствующем измеренному значению фокусного расстояния для первого логического сегмента изображения. Также измеренное приблизительное значение фокусного расстояния, соответствующее первому логическому сегменту изображения, может быть сохранено в репозитории 36 данных для дальнейшего использования.
[0057] После этого на шаге 66 может быть определено дополнительное измеренное значение фокусного расстояния при перемещении объектива 12 от первого логического сегмента изображения к следующему логическому сегменту изображения. В одном из вариантов осуществления настоящего изобретения следующий логический сегмент изображения может включать второй логический сегмент изображения.
[0058] В соответствии с дополнительными аспектами настоящего изобретения значение фокусного расстояния для второго логического сегмента изображения может быть предсказано с использованием измеренного значения фокусного расстояния, связанного с ближайшим соседним сегментом второго логического сегмента изображения, с поправками на информацию о предсказуемых изменениях фокусного расстояния, связанную с устройством 10 для формирования изображений. В частности, перед тем как на сканирующем столике 22 располагают образец 24 в положении, соответствующем второму сканируемому логическому сегменту изображения, может быть предсказано значение фокусного расстояния для второго логического сегмента изображения. Например, значение фокусного расстояния для второго сканируемого логического сегмента изображения может быть предсказано на основе измеренного значения фокусного расстояния для первого логического сегмента изображения (определенного, например, на шаге 66) и одного или более хранимых параметров изменения фокусного расстояния, как показано на шаге 68.
[0059] После определения предсказанного значения фокусного расстояния для второго логического сегмента изображения объектив 12 может быть расположен на расстоянии до образца, соответствующем упомянутому предсказанному значению фокусного расстояния, для обеспечения получения данных изображения во втором логическом сегменте изображения. А именно, контроллер 20 (см. фиг.1) может регулировать расстояние между объективом 12 и образцом 24 и устанавливать его равным предсказанному значению фокусного расстояния перед завершением перемещения объектива 12 относительно второго логического сегмента изображения. После этого на шаге 70 может быть сформировано изображение второго логического сегмента изображения с использованием предсказанного значения фокусного расстояния, соответствующего второму логическому сегменту изображения. Например, в одном из вариантов осуществления настоящего изобретения, основной датчик 16 изображений (см. фиг.1) может захватывать второе основное изображение, соответствующее второму логическому сегменту изображения, в то время как объектив 12 расположен на расстоянии до образца, соответствующем упомянутому предсказанному значению фокусного расстояния, которое соответствует второму логическому сегменту изображения. Здесь снова предсказанное значение фокусного расстояния, соответствующее второму логическому сегменту изображения, может быть сохранено в репозитории 36 данных для дальнейшего использования.
[0060] Путем реализации способа автофокусировки в соответствии с предыдущим описанием может быть обеспечено определение предсказанного значения фокусного расстояния для второго логического сегмента изображения во время перемещения образца 24 из первого положения, соответствующего первому логическому сегменту изображения, во второе положение, соответствующее второму логическому сегменту изображения. Следовательно, может быть получено значительное увеличение скорости сканирования, так как предсказанное значение фокусного расстояния для второго логического сегмента изображения вычисляют во время перемещения образца из первого положения, соответствующего первому логическому сегменту изображения, во второе положение, соответствующее второму логическому сегменту изображения. Путем устранения необходимости регулировки фокусного расстояния после завершения перемещения относительно второго логического сегмента изображения может быть повышена скорость сканирования. Также, поскольку предсказанное значение фокусного расстояния определяют с использованием соседних измеренных значений фокусного расстояния с поправками на предсказуемые изменения, получают точное предсказание значения фокусного расстояния с минимальным уменьшением качества изображения.
[0061] Следует отметить, что оставшееся множество логических сегментов изображения может быть отсканировано при осуществлении регулировки фокусного расстояния между сканированием каждого из упомянутого множества логических сегментов изображения, как описано со ссылкой на фиг.2-5. А именно, предсказанное значение фокусного расстояния для последующего логического сегмента изображения может быть определено на основе измеренного значения фокусного расстояния для текущего логического сегмента изображения, которое регулируется на основе предсказанного изменения положения, связанного со сканирующим столиком 22 и/или предметным стеклом 28.
[0062] В соответствии с другими аспектами настоящего изобретения предсказанное значение фокусного расстояния для последующего или следующего по порядку логического сегмента изображения также может быть определено на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, или измеренного значения фокусного расстояния, соответствующего соседнему логическому сегменту изображения из предыдущей строки. Однако может быть использовано среднее значение между измеренным значением фокусного расстояния, соответствующим текущему логическому сегменту изображения, и измеренным значением фокусного расстояния, соответствующим соседнему логическому сегменту изображения из предыдущей строки, для определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента изображения. Кроме того, в соответствии с другими аспектами настоящего изобретения, если ни измеренные значения фокусного расстояния, соответствующие текущему логическому сегменту изображения, ни измеренные значения фокусного расстояния, соответствующие соседнему логическому сегменту изображения из предыдущей строки, не доступны, то может быть использовано измеренное значение фокусного расстояния, соответствующее "ближайшему соседнему" логическому сегменту изображения в сочетании с информацией о предсказанных изменениях для определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента изображения. В соответствии с этим оптимальное значение фокусного расстояния для следующего сканируемого логического сегмента изображения может быть предсказано с использованием сочетания ранее определенных измеренных значений фокусного расстояния и информации о предсказуемых изменениях фокусного расстояния. Например, могут быть использованы измеренные значения фокусного расстояния из текущей строки и предыдущего столбца, или измеренные значения фокусного расстояния из текущего столбца и предыдущей строки, или их усредненное значение. Однако если не доступно ни одно из этих значений, то для предсказания оптимального значения фокусного расстояния для следующего логического сегмента изображения идентифицируют ближайшее измеренное значение фокусного расстояния и используют его в сочетании с информацией о предсказуемых изменениях фокусного расстояния.
[0063] Кроме того, множество логических сегментов изображения, соответствующих первой области, может быть отсканировано для получения основных изображений, соответствующих упомянутому множеству логических изображений, в соответствии с предыдущим описанием, при осуществлении регулировки фокусного расстояния во время перехода между логическими сегментами изображения. После сканирования первой области, могут также сканироваться и другие области образца 24, если они существуют, в соответствии с предыдущим описанием. В некоторых вариантах осуществления настоящего изобретения может выполняться постобработка полученных основных изображений для обеспечения визуализации изображений, при этом визуализированные изображения могут помочь врачу при диагностировании заболевания. Например, основные изображения могут быть обработаны посредством приложения с использованием процедуры регистрации изображений. Вслед за этим зарегистрированные изображения могут быть сшиты для формирования единого изображения. Также изображение может быть сжато и обработано для хранения. В некоторых вариантах осуществления настоящего изобретения обработанные изображения могут быть сохранены в репозитории 36 данных. После того как все области в образце 24 будут отсканированы, сканирующий столик 22 может быть опущен, а предметное стекло 28 может быть заменено другим предметным стеклом.
[0064] Описанный выше способ автофокусировки может быть лучше понят, если обратиться к фиг.6. На фиг.6 показана блок-схема 130, иллюстрирующая способ автофокусировки во время процесса высокоскоростного сканирования в соответствии с аспектами настоящего изобретения. Как отмечалось ранее, в устройстве 10 для формирования изображений (см. фиг.1), включающем объектив 12 и сканирующий столик 22 для удержания образца 24, способ автофокусировки включает помещение предметного стекла 28 на сканирующий столик 22 и идентификацию предметного стекла 28, содержащего образец 24. Предметное стекло 28 может быть идентифицировано для обеспечения извлечения соответствующих сохраненных параметров изменения фокусного расстояния из репозитория 36 данных. Затем может быть получено макроизображение 132 образца 24 для обеспечения подготовки плана сканирования для образца 24. А именно, с использованием макроизображения 132 образец 24 может быть сегментирован на множество областей, причем каждая область из этого множества областей может включать множество логических сегментов изображения. Следует отметить, что в некоторых вариантах осуществления изобретения непосредственно макроизображение 132 может быть сегментировано на множество логических сегментов изображения при наличии только одной области. В примере, показанном на фиг.6, непосредственно макроизображение 132 сегментируют на множество логических сегментов изображения, в целом обозначенных с помощью числового обозначения 134.
[0065] Также, в настоящем примере числовое обозначение 136 может в общем случае указывать начальный логический сегмент формирования изображения на основе заданного плана сканирования. Следует отметить что выражения "начальный логический сегмент формирования изображения" и "первый логический сегмент формирования изображения" могут быть использованы взаимозаменяемо. При этом числовое обозначение 138 может представлять второй логический сегмент изображения, тогда как третий логический сегмент изображения может быть представлен числовым обозначением 140. Аналогично, числовое обозначение 142 может представлять четвертый логический сегмент изображения, в то время как числовое обозначение 144 может представлять пятый логический сегмент изображения. Следует отметить, что для иллюстрации в настоящем примере способ автофокусировки описан со ссылками лишь на избранное подмножество логических сегментов изображения, а именно на первый, второй, третий, четвертый и пятый логические сегменты 136, 138, 140, 142 и 144 изображения. При этом числовое обозначение 146 может представлять направление сканирования. Кроме того, как отмечалось выше, макроизображение 132 может быть использовано для определения позиции 148, используемой для выполнения грубой фокусировки перед началом сканирования образца 24. В настоящем примере позиция 148 грубой фокусировки, соответствующая макроизображению 132, может быть определена перед началом сканирования логических сегментов изображения образца 24, при этом упомянутая позиция 148 грубой фокусировки также соответствует начальному логическому сегменту 136 изображения, в котором будет формироваться первое основное изображение. Соответственно, как проиллюстрировано в настоящем примере, приблизительное значение фокусного расстояния может быть определено в позиции 148 грубой фокусировки, соответствующей начальному логическому сегменту 136 изображения, путем получения множества вспомогательных изображений на различных расстояниях до образца и вычисления оптимального расстояния до образца в соответствии с предшествующим описанием.
[0066] После этого может быть инициировано сканирование образца 24 на основе упомянутого приблизительного значения фокусного расстояния, определенного в начальной позиции 148 грубой фокусировки. Объектив 12 может затем быть помещен на расстоянии до образца, соответствующем упомянутому определенному приблизительному значению фокусного расстояния, относительно образца 24 в начальном логическом сегменте 136 изображения. А именно, значение фокусного расстояния может быть отрегулировано и установлено равным упомянутому приблизительному значению фокусного расстояния так, чтобы поле зрения находилось в фокусе, при этом может быть получено изображение начального логического сегмента 136 изображения.
[0067] В соответствии с другими аспектами настоящего изобретения после определения приблизительного значения фокусного расстояния и получения основного изображения для начального логического сегмента 136 изображения может быть определено измеренное значение фокусного расстояния для первого логического сегмента 138 изображения. А именно, измеренное значение фокусного расстояния, соответствующее первому логическому сегменту 136 изображения, может быть определено во время перемещения образца 24 от начального логического сегмента 136 изображения во второе положение, то есть в центр второго логического сегмента 138 изображения. Это измеренное значение фокусного расстояния, соответствующее первому логическому сегменту 136 изображения, может быть затем использовано при подготовке к формированию изображения для следующего по порядку сканируемого логического сегмента изображения, например второго логического сегмента 138 изображения. Как отмечалось выше, измеренное значение фокусного расстояния может быть определено путем получения по меньшей мере трех вспомогательных изображений при соответствующих значениях фокусного расстояния. Например, первое вспомогательное изображение может быть получено при первом значении фокусного расстояния, которое по существу равно приблизительному значению фокусного расстояния, второе вспомогательное изображение может быть получено при втором приблизительном значении, которое меньше упомянутого приблизительного значения фокусного расстояния, а третье вспомогательное изображение может быть получено при третьем значении фокусного расстояния, которое больше упомянутого приблизительного значения фокусного расстояния. При этом рассматриваемая область внутри трех упомянутых вспомогательных изображений может быть смещена для обеспечения возможности выбора содержимого изображения, общего для упомянутых трех вспомогательных изображений.
[0068] Дополнительно могут быть вычислены количественные характеристики, соответствующие выбранному содержимому трех упомянутых вспомогательных изображений. Эти три количественные характеристики могут затем быть интерполированы для получения измеренного значения фокусного расстояния, используемого для подготовки к формированию изображения второго логического сегмента 138 изображения. А именно, унимодальная функция, например распределение Лоренца, может быть аппроксимирована по трем количественным характеристиками, соответствующим трем вспомогательным изображениям. Может быть идентифицирована мода унимодальной функции, причем эта мода кривой может указывать измеренное значение фокусного расстояния для подготовки к формированию изображения второго логического сегмента 138 изображения. В то же время измеренное значение фокусного расстояния может быть сохранено в репозитории 36 данных для использования при вычислении предсказанных значений фокусного расстояния для остальных логических сегментов изображения образца 24.
[0069] В соответствии с другими аспектами настоящего изобретения все хранимые параметры изменения фокусного расстояния, связанные с текущим положением (x, y) образца 24, могут извлекаться из репозитория 36 данных. Вслед за этим может быть определено предсказанное значение фокусного расстояния на основе измеренного значения фокусного расстояния и хранимых параметров изменения фокусного расстояния, если они существуют. В некоторых вариантах осуществления настоящего изобретения предсказанное значение фокусного расстояния может сохраняться в репозитории 36 данных.
[0070] Например, как показано на фиг.6, может быть вычислено точное измеренное значение фокусного расстояния z1 при подготовке к формированию изображения второго логического сегмента 138 изображения в области 150, начинающейся в начальном логическом сегменте 136 изображения и продолжающейся во втором логическом сегменте 138 изображения. Следовательно, предсказанное значение фокусного расстояния, соответствующее второму логическому сегменту 138 изображения, определяется перед завершением перемещения центра второго логического сегмента 138 изображения относительно объектива 12. Затем может быть получено основное изображение, соответствующее второму логическому сегменту 138 изображения, при помещении объектива 12 на расстоянии до образца, соответствующем предсказанному значению фокусного расстояния. Основное изображение может быть сохранено в репозитории 36 данных. Также, путем определения предсказанного значения фокусного расстояния в соответствии с рассмотренным выше описанием может быть увеличена скорость сканирования, поскольку отсутствует необходимость в остановке сканирующего столика 22 во втором логическом сегменте 138 изображения для обеспечения определения измеренного значения фокусного расстояния, соответствующего второму логическому сегменту 138 изображения.
[0071] В соответствии с аспектами настоящего изобретения предсказанное значение фокусного расстояния для следующего по порядку логического сегмента изображения может быть определено на основе измеренного фокусного расстояния, соответствующего текущему логическому сегменту изображения. Как отмечалось ранее, в одном из вариантов осуществления настоящего изобретения способ автофокусировки может включать определение предсказанного значения фокусного расстояния для следующего по порядку логического сегмента изображения на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения, и любых соответствующих хранимых параметров изменения фокусного расстояния. В настоящем примере текущий логический сегмент изображения может включать первый логический сегмент 136 изображения, а следующий логический сегмент изображения может включать второй логический сегмент 138 изображения. Данный способ автофокусировки может быть лучше понят, если обратиться к фиг.7.
[0072] На фиг.7 изображена блок-схема 170, иллюстрирующая пример способа автофокусировки. В частности, на фиг.7 представлен способ автофокусировки путем определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента 174 изображения на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту 172 изображения. Следует отметить, что в проиллюстрированном на фиг.7 примере следующий по порядку логический сегмент 174 изображения расположен рядом с текущим логическим сегментом 172 изображения. Как отмечалось ранее, информация о предсказуемых изменениях фокусного расстояния, соответствующая следующему по порядку логическому сегменту 174 изображения, может извлекаться из репозитория 36 данных (см. фиг.1) для обеспечения определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента 174 изображения. Числовое обозначение 176 представляет направление сканирования. Также, в соответствии с примерами аспектов настоящего изобретения, определение предсказанного значения фокусного расстояния для следующего по порядку логического сегмента 174 изображения выполняют во время перемещения образца из первого положения, соответствующего текущему логическому сегменту 172 изображения, во второе положение, соответствующее следующему по порядку логическому сегменту 174 изображения, как обозначено с помощью числового обозначения 178. Путем определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента 174 изображения и реализации соответствующей регулировки значения фокусного расстояния во время перемещения образца из первого положения, соответствующего текущему логическому сегменту 172 изображения, во второе положение, соответствующее следующему по порядку логическому сегменту 174 изображения, может быть увеличена скорость сканирования.
[0073] Как показано на фиг.6, после определения предсказанного значения фокусного расстояния для следующего по порядку логического сегмента изображения, объектив 12 может быть помещен на расстоянии до образца, соответствующем предсказанному значению фокусного расстояния, перед перемещением образца из первого положения, соответствующего текущему логическому сегменту 136 изображения, во второе положение, соответствующее следующему по порядку логическому сегменту 138 изображения. Основное изображение, соответствующее следующему по порядку логическому сегменту 138 изображения, может быть получено с объективом 12, расположенным на расстоянии до образца, соответствующем предсказанному значению фокусного расстояния, относительно второго логического сегмента 138 изображения.
[0074] В соответствии с другими примерами аспектов настоящего изобретения, если текущий логический сегмент изображения включает значительный объем белого пространства, то предсказанное значение фокусного расстояния для следующего по порядку логического сегмента изображения может быть определено на основе измеренного значения фокусного расстояния, соответствующего соседнему логическому сегменту изображения из предыдущей строки. Также, если измеренное значение фокусного расстояния, соответствующее соседнему логическому сегменту изображения из предыдущей строки, не доступно, то для определения предсказанного значения фокусного расстояния, соответствующего следующему по порядку логическому сегменту изображения, может быть использовано измеренное значение фокусного расстояния, соответствующее ближайшему логическому сегменту изображения из предыдущей строки или предыдущего столбца. В настоящем примере, показанном на фиг.6, перед позиционированием поля зрения в третьем логическом сегменте 140 изображения могут сканироваться несколько подобных белых областей. Данный способ автофокусировки можно лучше понять, если обратиться к фиг.8.
[0075] На фиг.8 представлена блок-схема 180, иллюстрирующая способ автофокусировки. А именно, если доступно измеренное значение фокусного расстояния для текущего логического сегмента 182 изображения (строка r, столбец с), то предсказанное значение фокусного расстояния для следующего по порядку логического сегмента 184 изображения (строка r, столбец с+1) может быть определено на основе измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту 182 изображения. Однако если измеренное значение фокусного расстояния, соответствующее текущему логическому сегменту 182 изображения, недоступно или если текущий логический сегмент 182 изображения включает большой объем белого пространства, то предсказанное значение фокусного расстояния для следующего по порядку логического сегмента 184 изображения может быть определено на основе измеренного значения фокусного расстояния, соответствующего соседнему логическому сегменту 186 изображения (строка r-1, столбец с+1) из предыдущей строки (r-1). Также, если недоступно даже измеренное значение фокусного расстояния, соответствующее соседнему логическому сегменту 186 изображения, то предсказанное значение фокусного расстояния для следующего по порядку логического сегмента 184 изображения может быть определено на основе измеренного значения фокусного расстояния, соответствующего соседнему, но не обязательно смежному логическому сегменту 188 изображения (строка r-1, столбец с+2) из предыдущей строки (r-1). В дополнение, как отмечалось ранее, хранимые параметры изменения фокусного расстояния, связанные с соответствующими логическими сегментами изображения, могут быть извлечены из репозитория 36 данных для обеспечения определения предсказанных значений фокусного расстояния. Числовое обозначение 190 представляет направление сканирования.
[0076] Как показано на фиг.6, в настоящем примере перед тем, как поле зрения возвращается к третьему логическому сегменту 140 изображения, сканируют несколько сегментов с белым пространством. Предсказанное значение фокусного расстояния для третьего логического сегмента 140 изображения может быть определено на основе измеренного значения фокусного расстояния z1, соответствующего второму логическому сегменту 138 изображения, в соответствии с описанием фиг.8. Дополнительно, предсказанное значение фокусного расстояния может также быть определено на основе информации о предсказуемых изменениях фокусного расстояния, например хранимых параметров изменения фокусного расстояния, соответствующих положению третьего логического сегмента 140 изображения. В одном из вариантов осуществления настоящего изобретения предсказуемые изменения фокусного расстояния могут описываться функцией значений (x, y), соответствующих логическому сегменту изображения. Как отмечалось ранее, предсказуемые изменения фокусного расстояния могут быть определены вручную или посредством автоматического анализа данных множества предыдущих сканирований. В соответствии с этим, в одном из вариантов осуществления настоящего изобретения, предсказуемые изменения фокусного расстояния (predictable focus variation, PFV) могут определяться как:

где а - наклон сканирующего столика 22 в направлении x, b - наклон сканирующего столика 22 в направлении y, а (x, y) представляют собой значения положения, представляющие второй логический сегмент 138 изображения или третий логический сегмент 140 изображения.
[0077] В соответствии с этим, оптимальное предсказанное значение фокусного расстояния Zpred для третьего логического сегмента 140 изображения может быть определено с использованием ближайшего измеренного значения фокусного расстояния (измеренного значения фокусного расстояния z1, соответствующего второму логическому сегменту 138 изображения) и хранимого параметра изменения фокусного расстояния как:

[0078] В одном из вариантов осуществления настоящего изобретения вычисление предсказуемых изменений фокусного расстояния (PFV) (уравнение 1) и измеренных значений фокусного расстояния (уравнение 2) может включать линейные функции. Однако в некоторых других вариантах осуществления настоящего изобретения, для вычисления предсказуемых изменений фокусного расстояния и измеренных значений фокусного расстояния могут быть использованы нелинейные функции.
[0079] Аналогично, предсказанное значение фокусного расстояния для четвертого логического сегмента 142 изображения может быть предсказано с использованием ближайшего измеренного значения фокусного расстояния z3, а предсказанное значение фокусного расстояния для пятого логического сегмента 144 изображения может быть определено на основе ближайшего измеренного значения фокусного расстояния z4. В соответствии с этим, информация о соседнем измеряемом значении фокусного расстояния для текущего логического сегмента изображения может комбинироваться с хранимой калибровочной информацией о сканирующем столике 22, предметном стекле 28 и/или других повторяющихся изменениях положения, для экстраполяции предсказанного значения фокусного расстояния для следующего сканируемого логического сегмента изображения.
[0080] На фиг.9 проиллюстрирован вариант осуществления 200 контроллера 20, показанного на фиг.1. Как отмечалось ранее, контроллер 20 может быть сконфигурирован для определения измеренного значения фокусного расстояния, соответствующего первому из множества логических сегментов изображения, для формирования изображения первого логического сегмента изображения с использованием упомянутого измеренного значения фокусного расстояния, для определения предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием упомянутого измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния, а также для формирования изображения второго логического сегмента изображения с использованием упомянутого предсказанного значения фокусного расстояния. В рассматриваемой конфигурации контроллер 20 может включать модуль 202 управления и модуль 204 получения изображения.
[0081] Модуль 202 управления может быть сконфигурирован для управления сканированием образца 24, размещенного на предметном стекле 28 и удерживаемого сканирующим столиком 22 устройства 10 для формирования изображений. В проиллюстрированном варианте осуществления настоящего изобретения показано, что модуль 202 управления включает компонент 206 формирования макроизображения и планирования сканирования, компонент 208 автофокусировки, компонент 210 управления перемещением и компонент 212 синхронизации. Компонент 206 формирования макроизображения и планирования сканирования может быть сконфигурирован для получения макроизображения и формирования плана сканирования для образца 24. Дополнительно компонент 206 формирования макроизображения и планирования сканирования может быть также сконфигурирован для обеспечения возможности связи с пользовательским интерфейсами и органами управления устройства 10 для формирования изображений.
[0082] Компонент 208 автофокусировки может быть сконфигурирован для управления последовательностью сканирования, планируемой компонентом 206 планирования сканирования. Дополнительно, компонент 208 автофокусировки может быть сконфигурирован для обеспечения получения и обработки вспомогательных изображений, получаемых вспомогательным датчиком 18 изображений. Кроме того, компонент 208 автофокусировки может быть также сконфигурирован для обеспечения вычисления количественных характеристик, связанных с этими вспомогательными изображениями. Также, компонент 208 автофокусировки может быть сконфигурирован для обеспечения сохранения измеренных значений фокусного расстояния и предсказанных значений фокусного расстояния в репозитории 36 данных и для извлечения хранимых параметров изменения фокусного расстояния из репозитория 36 данных.
Дополнительно, компонент 208 автофокусировки может быть сконфигурирован для обеспечения хранения вспомогательных изображений, получаемых устройством 10 для формирования изображений, в репозитории 36 данных.
[0083] Как показано на фиг.9, компонент 210 управления перемещением может быть сконфигурирован для обеспечения загрузки и/или выгрузки одного или более предметных стекол из сканирующего столика 22 устройства 10 для формирования изображений. Дополнительно, компонент 210 управления перемещением может также быть использован для обеспечения вычисления приблизительного значения фокусного расстояния перед началом последовательности операций сканирования. Также, компонент 210 управления перемещением может быть использован для обеспечения управления перемещением в направлении X-Y при сканировании.
[0084] Кроме того, компонент 212 синхронизации может быть сконфигурирован для синхронизации работы различных компонентов в устройстве 10 для формирования изображений. А именно, компонент 212 синхронизации может быть сконфигурирован для генерации сигналов для управления и синхронизации получения вспомогательных изображений и основных изображений. В некоторых вариантах осуществления изобретения компонент 212 синхронизации может также управлять перемещением контроллера положения.
[0085] Кроме того, модуль 204 получения изображений может быть сконфигурирован для обеспечения получения основных изображений с помощью основного датчика 16 изображений устройства 10 для формирования изображений. Дополнительно, модуль 204 получения изображений может также применяться для постобработки полученных основных изображений. Например, модуль 204 получения изображений может быть использован для обеспечения регистрации полученных основных изображений. Модуль 204 получения изображений может также быть сконфигурирован для обеспечения формирования плана сшивания основных изображений для визуализации изображений.
[0086] Специалистам в данной области техники должно быть понятно, что предыдущий пример, иллюстрации и шаги процедуры, которые, например, могут быть выполнены контроллером 20, могут быть также реализованы посредством соответствующего кода в процессорной системе, например в компьютере общего или специального назначения. Следует также отметить, что различные реализации настоящего изобретения могут выполнять некоторые или все шаги, рассмотренные в настоящем описании, в другом порядке или по существу одновременно, т.е. параллельно. Также, упомянутые функции могут быть реализованы на множестве языков программирования, включая (но не ограничиваясь приведенными примерами) C++ или Java. Упомянутый код, что должно быть очевидно специалистам в данной области техники, может храниться или быть адаптируемым для хранения на одном или более машиночитаемом носителе, например в микросхемах памяти, логических или удаленных жестких дисках, оптических дисках (то есть CD или DVD) или других носителях, к которым может осуществлять доступ процессорная система для исполнения хранимого кода. Следует отметить, что упомянутый материальный носитель может включать бумагу или другой соответствующий носитель, на котором напечатаны инструкции. Например, инструкции могут захватываться электронным способом путем оптического сканирования бумаги или иного носителя, затем компилироваться, интерпретироваться или иным образом обрабатываться соответствующим способом, при необходимости, и затем сохраняться в память компьютера.
[0087] На фиг.10 проиллюстрирован пример временной диаграммы 220 для осуществления автофокусировки в соответствии с примерами аспектов настоящего изобретения. В одном из вариантов осуществления настоящего изобретения синхронизация сигналов различных компонентов устройства 10 для формирования изображений может управляться и синхронизироваться компонентом 212 синхронизации, показанным на фиг.9. Несмотря на то что фиг.10 и последующее описание ссылается на конкретные временные отрезки, такие временные соотношения приведены лишь для иллюстрации. Следует понимать, что скорость, с которой функционируют устройство 10 для формирования изображений и его компоненты, может масштабироваться в зависимости от используемой технологии, и следовательно, никакие конкретные детали не следует интерпретировать как ограничивающие.
[0088] В текущем логическом сегменте изображения (элемент n) компонент 212 может запускать основной датчик 16 изображений (см. фиг.1). Вслед за этим может быть открыт орган управления получением изображения основного датчика 16 изображения. В одном из вариантов осуществления настоящего изобретения орган управления получением изображения основного датчика 16 изображения может включать затвор основного датчика 16 изображений. Также, в одном из вариантов осуществления настоящего изобретения, затвор основного датчика 16 изображений может оставаться открытым в течение около 1 миллисекунды. Вспомогательный датчик 18 изображений затем может быть запущен для обеспечения получения вспомогательных изображений. Как отмечалось ранее, вспомогательный датчик 18 изображений может быть сконфигурирован для получения трех вспомогательных изображений при трех различных значениях фокусного расстояния для определения измеренного значения фокусного расстояния, соответствующего текущему логическому сегменту изображения. В соответствии с этим вспомогательный датчик 18 может быть запущен в три различных момента времени. При каждом запуске орган управления получением изображения вспомогательного датчика 18 изображений может быть открыт для получения соответствующего вспомогательного изображения. В одном из вариантов осуществления настоящего изобретения орган управления получением изображения для вспомогательного датчика 18 изображения может включать затвор вспомогательного датчика 18 изображений. Кроме того, в одном из вариантов осуществления настоящего изобретения вспомогательный датчик 18 изображений может запускаться с интервалами времени около 10 миллисекунд между каждым запуском. При этом, когда затвор вспомогательного датчика 18 изображений открыт, может также инициироваться стробирование подсветки для активирования светодиодных или иных устройств подсветки. В одном из вариантов осуществления настоящего изобретения продолжительность каждого импульса стробирования подсветки может составлять около 10 миллисекунд. Устройство подсветки может быть сконфигурировано для подсветки образца 24, чем обеспечивается получение трех вспомогательных изображений.
[0089] Кроме того, контроллер положения может быть сконфигурирован для перемещения объектива 12 относительно образца 24 в направлении Z на основе информации, принятой от вспомогательного датчика 18 изображений. А именно, контроллер положения может быть сконфигурирован для размещения объектива 12 при первом значении фокусного расстояния для получения первого вспомогательного изображения. Как отмечалось ранее, в некоторых вариантах осуществления настоящего изобретения первое значение фокусного расстояния может включать приблизительное значение фокусного расстояния. Вслед за этим, как показано на фиг.10, контроллер положения может быть сконфигурирован для размещения объектива 12 при втором значении фокусного расстояния для получения второго вспомогательного изображения, причем второе значение фокусного расстояния меньше, чем первое значение фокусного расстояния. Аналогично, контроллер положения может быть сконфигурирован для последующего размещения объектива 12 при третьем значении фокусного расстояния для получения третьего вспомогательного изображения, причем третье значение фокусного расстояния больше, чем первое значение фокусного расстояния. После определения измеренного значения фокусного расстояния контроллер положения может быть сконфигурирован для размещения объектива 12 на расстоянии до образца, соответствующем упомянутому измеренному значению фокусного расстояния. Следует отметить, что контроллер положения может быть сконфигурирован для размещения объектива 12 на расстоянии до образца, соответствующем измеренному значению фокусного расстояния, перед завершением перемещения следующего логического сегмента изображения (элемент n+1) относительно объектива 12. Как показано на фиг.10, в одном из вариантов осуществления настоящего изобретения процедура автофокусировки на образце между текущим логическим сегментом изображения (элемент n) и следующим логическим сегментом изображения (элемент n+1) может быть завершена в интервале времени, составляющем приблизительно от 60 миллисекунд до 80 миллисекунд.
[0090] Способ автофокусировки и устройство для формирования изображений, рассмотренные выше в настоящем описании, повышают скорость сканирования при минимальном снижении качества изображения. А именно, поскольку определяют оптимальное значение фокусного расстояния для следующего логического сегмента изображения и поскольку все регулировки значения фокусного расстояния реализуют во время перемещения образца из первого положения, соответствующего текущему логическому сегменту изображения, во второе положение, соответствующее следующему логическому сегменту изображения, скорость сканирования может быть повышена. Дополнительно, предсказуемые значения фокусного расстояния для полученных впоследствии логических сегментов изображения используют информацию о полученных ранее логических сегментах изображения и любых источниках предсказуемых изменений положения, таких как наклон или колебания, что в результате дает улучшенные предсказанные оптимальные значения фокусного расстояния. Точное предсказание значения фокусного расстояния для следующего логического сегмента изображения позволяет устранить необходимость завершения процедуры автофокусировки в логическом сегменте изображения перед получением основного изображения, что значительно повышает скорость сканирования с сохранением достаточного качества фокусировки. Путем учета повторяющихся механических изменений положения сканирующего столика в алгоритме автофокусировки с предсказанием снижаются требования к точности выполнения сканирующего столика, что позволяет снизить его стоимость. Качество изображения и производительность сканера могут быть улучшены, что позволяет усовершенствовать последовательность операций, выполняемых медперсоналом, путем повышения скорости сканирования с сохранением качества изображения.
[0090] Несмотря на то что в настоящем описании были проиллюстрированы и рассмотрены только конкретные признаки настоящего изобретения, специалистам в данной области техники могут быть очевидны множество модификаций и изменений. Следует, соответственно, понимать, что приложенная формула изобретения предназначена для охвата всех таких модификаций и изменений, не выходящих за рамки настоящего изобретения.
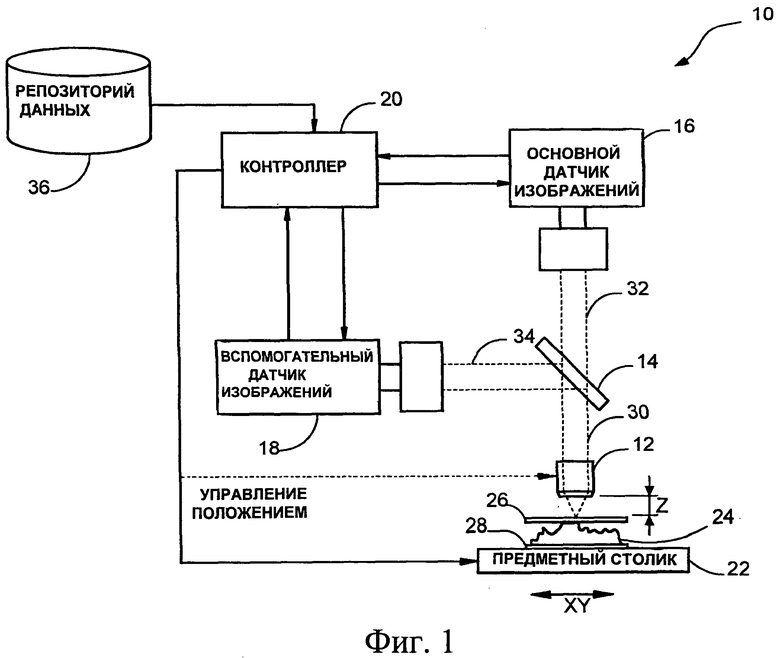
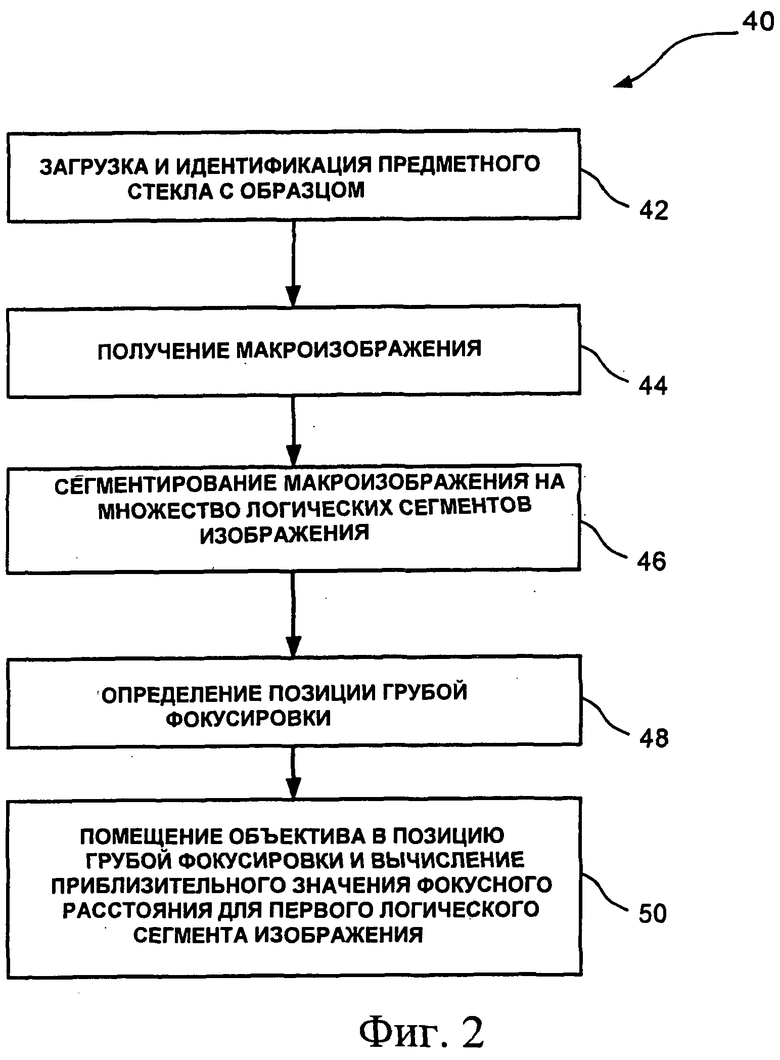
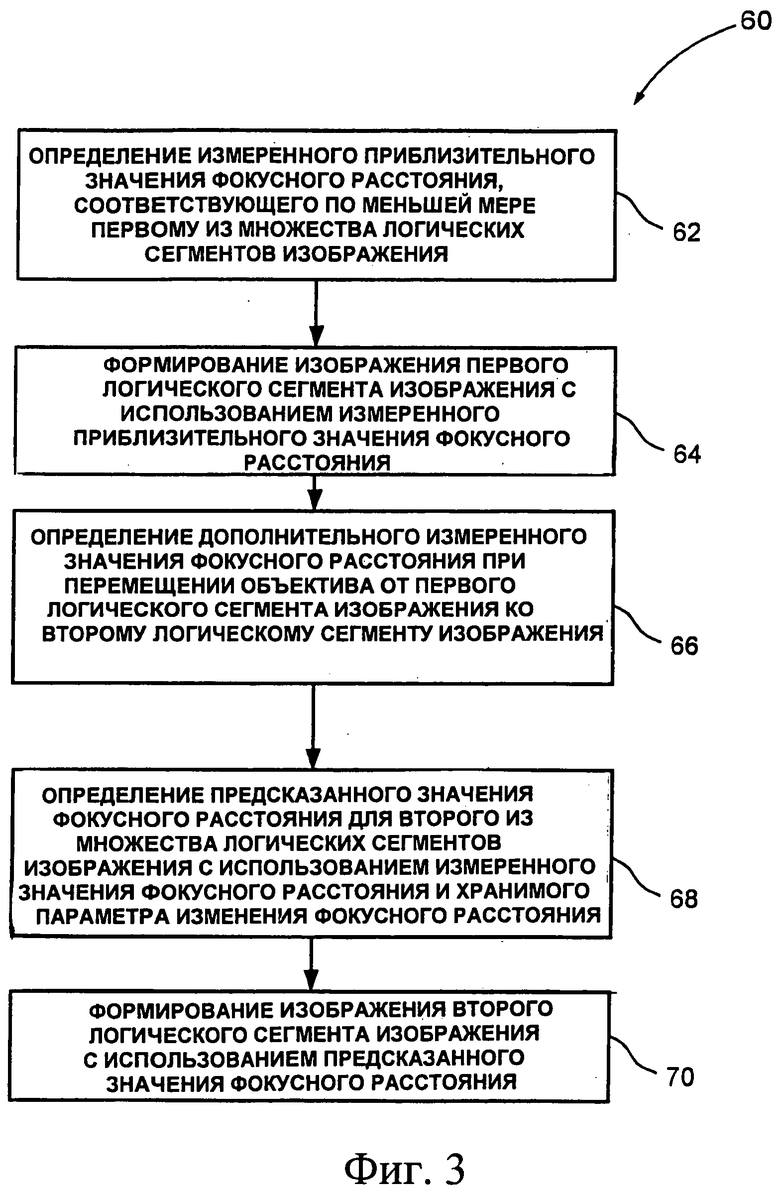
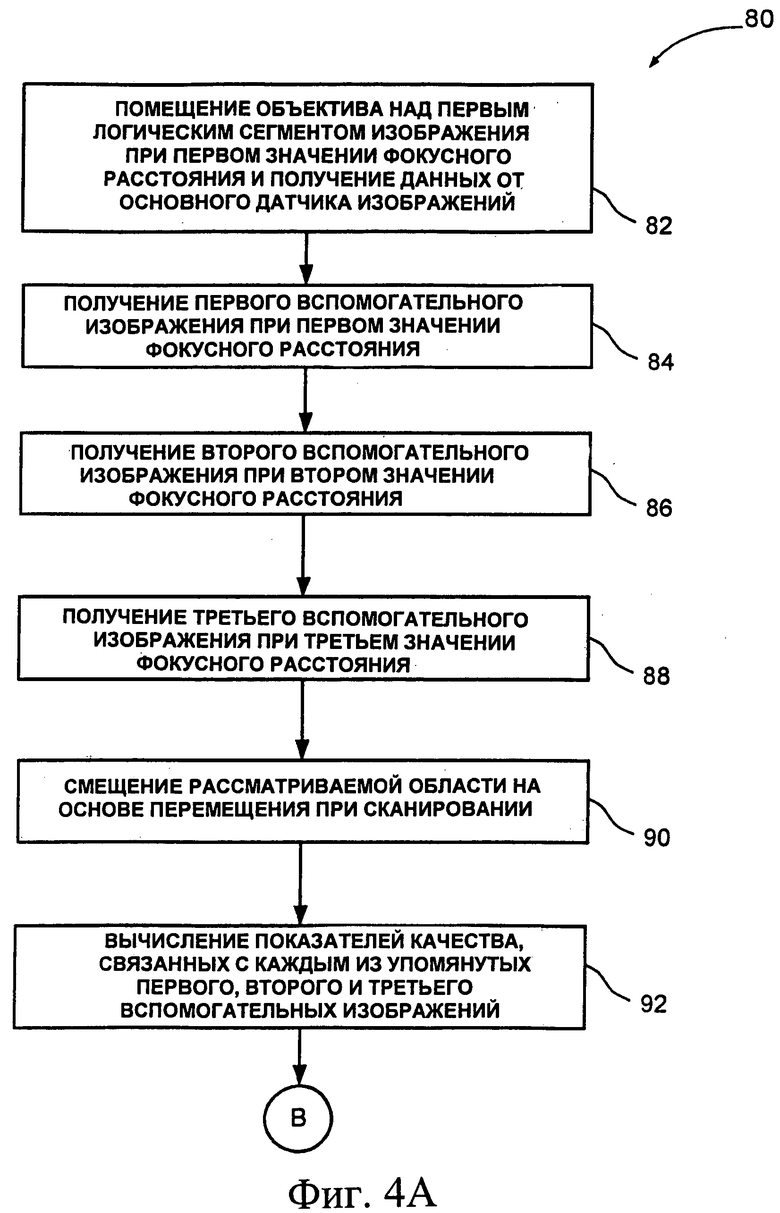

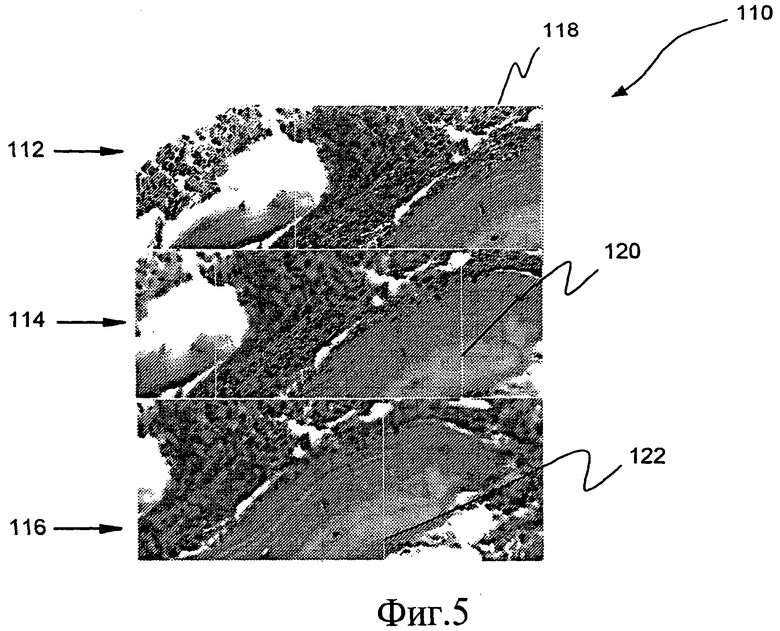
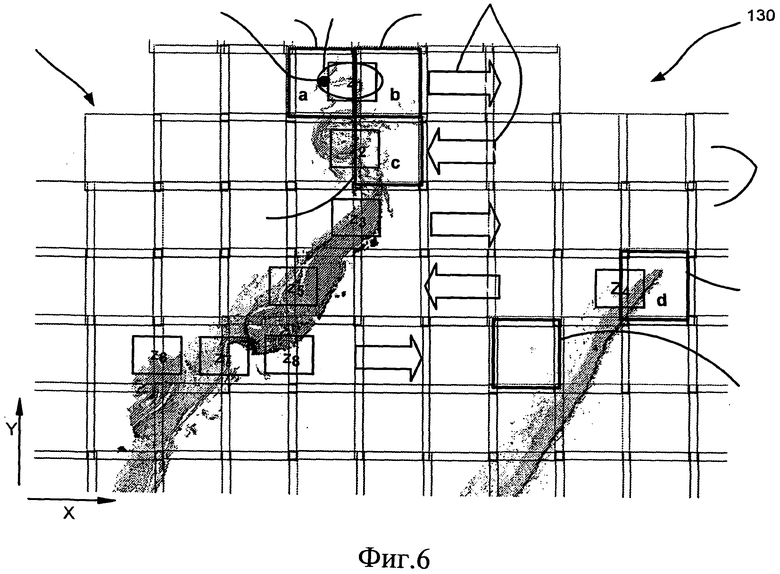
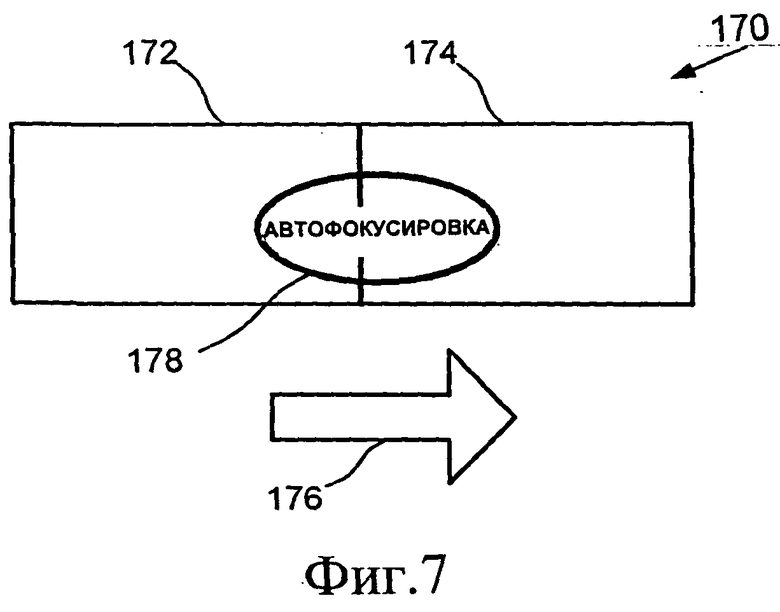
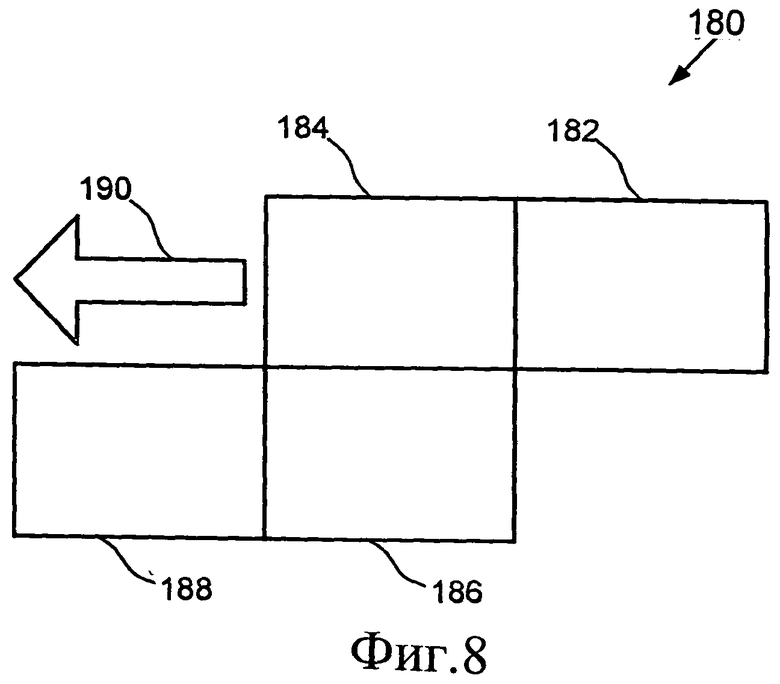
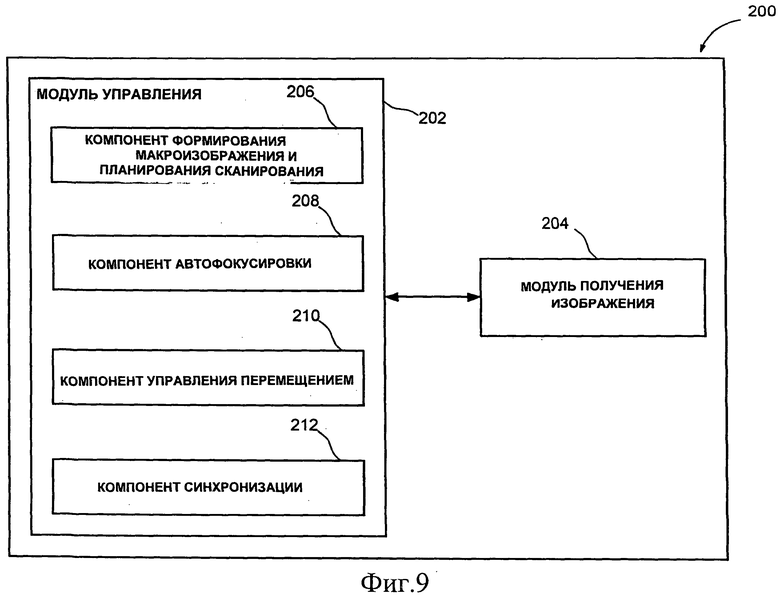
Изобретение относится к автофокусировке с предсказанием. Рассмотрен способ автофокусировки в устройстве для формирования изображений, включающем объектив и столик для удержания образца, изображение которого необходимо получить. Способ включает определение измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения. Также способ включает формирование изображения первого логического сегмента изображения с использованием измеренного значения фокусного расстояния. Способ также включает определение предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния. Дополнительно способ включает формирование изображения второго логического сегмента изображения с использованием предсказанного значения фокусного расстояния. Технический результат - увеличение скорости сканирования, повышение качества изображения, упрощение последовательности клинических операций при сканировании. 3 н. и 18 з.п. ф-лы, 11 ил.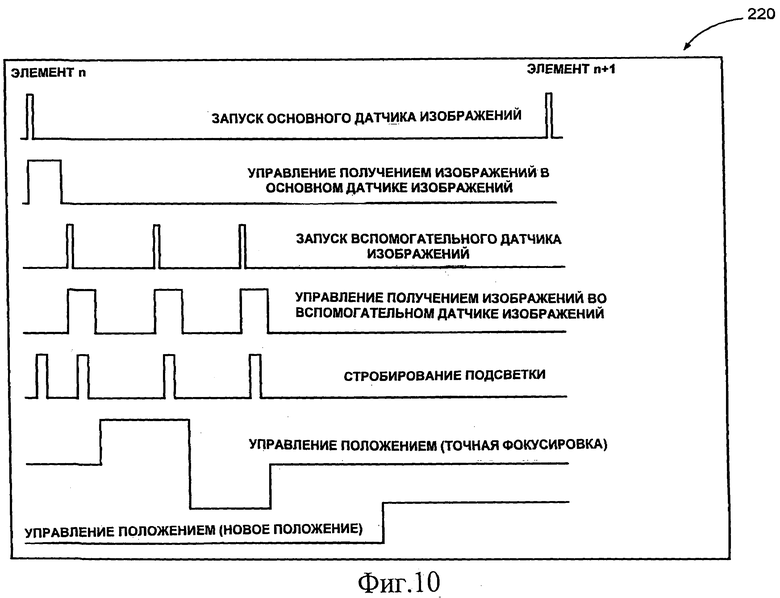
1. Способ автофокусировки в устройстве для формирования изображений, содержащем объектив и столик для удержания образца, изображение которого необходимо сформировать, при этом указанный способ включает:
определение измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения;
формирование изображения первого логического сегмента изображения с использованием упомянутого измеренного значения фокусного расстояния;
определение предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием упомянутого измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния; и
формирование изображения второго логического сегмента изображения с использованием упомянутого предсказанного значения фокусного расстояния.
2. Способ по п.1, также включающий:
определение позиции для выполнения грубой фокусировки для формирования изображения образца, расположенного на сканирующем столике;
помещение объектива в упомянутой позиции для выполнения грубой фокусировки; и
определение приблизительного значения фокусного расстояния для формирования изображения образца, расположенного на сканирующем столике.
3. Способ по п.1, также включающий логическое сегментирование образца на множество логических сегментов изображения.
4. Способ по п.1, в котором измеренное значение фокусного расстояния определяют во время перемещения образца относительно устройства для формирования изображений.
5. Способ по п.1, в котором предсказанное значение фокусного расстояния определяют во время перемещения образца из первого положения, соответствующего первому логическому сегменту изображения, во второе положение, соответствующее второму логическому сегменту изображения.
6. Способ по п.1, в котором формирование изображения второго логического сегмента изображения с использованием предсказанного значения фокусного расстояния включает уменьшение или увеличение расстояния между образцом и объективом.
7. Способ по п.1, в котором хранимые параметры изменения фокусного расстояния представляют собой воспроизводимые изменения положения устройства для формирования изображений, образца или устройства для формирования изображений и образца одновременно.
8. Способ по п.7, в котором хранимые параметры изменения фокусного расстояния представляют собой наклон или колебания, связанные со столиком.
9. Способ по п.7, в котором хранимые параметры изменения фокусного расстояния представляют собой воспроизводимые изменения положения, связанные с предметным стеклом, на котором находится образец.
10. Способ по п.1, в котором определение предсказанного значения фокусного расстояния включает извлечение одного или более параметров изменения фокусного расстояния из репозитория данных.
11. Способ по п.1, в котором определение измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения, включает:
получение по меньшей мере трех вспомогательных изображений при различных значениях фокусного расстояния;
определение количественной характеристики для каждого из упомянутых вспомогательных изображений; и
интерполяцию измеренного значения фокусного расстояния на основе упомянутых количественных характеристик.
12. Способ по п.11, в котором определение измеренного значения фокусного расстояния также включает смещение рассматриваемой области в упомянутых по меньшей мере трех вспомогательных изображениях на заданное расстояние для обеспечения выбора по существу аналогичного набора пикселей изображения в каждом из упомянутых по меньшей мере трех вспомогательных изображениях.
13. Способ по п.12, в котором определение количественной характеристики включает определение, для каждого пикселя в подмножестве пикселей, разности яркостей между указанным пикселем и соседним пикселем, отделенным в поперечном направлении от данного пикселя по меньшей мере еще одним пикселем, и суммирование возведенной в квадрат разности яркостей пикселей для каждого пикселя по высоте и ширине изображения.
14. Способ по п.12, в котором интерполяция измеренного значения фокусного расстояния на основе количественных характеристик включает:
интерполяцию измеренного значения фокусного расстояния путем аппроксимации упомянутых количественных характеристик упомянутых по меньшей мере трех вспомогательных изображений унимодальной функцией; и
идентификацию моды полученной кривой.
15. Способ по п.14, в котором определение измеренного значения фокусного расстояния также включает определение измеренного значения фокусного расстояния на основе идентифицированной моды, хранимого параметра изменения фокусного расстояния или их комбинации.
16. Устройство для формирования изображений, включающее:
объектив;
основной датчик изображений, сконфигурированный для формирования основного изображения образца с частотой смены кадров основного изображения;
вспомогательный датчик изображений, сконфигурированный для формирования одного или более вспомогательного изображения образца с частотой смены кадров вспомогательного изображения, которая является более высокой, чем частота смены кадров основного изображения;
контроллер, сконфигурированный для регулировки значения фокусного расстояния между объективом и образцом вдоль оптической оси для автофокусировки изображения образца;
сканирующий столик для размещения образца и его перемещения по меньшей мере в поперечном направлении, которое по существу ортогонально оптической оси,
при этом упомянутый контроллер сконфигурирован для:
определения измеренного значения фокусного расстояния, соответствующего по меньшей мере первому из множества логических сегментов изображения;
формирования изображения первого логического сегмента изображения с использованием упомянутого измеренного значения фокусного расстояния;
определения предсказанного значения фокусного расстояния для второго из множества логических сегментов изображения с использованием упомянутого измеренного значения фокусного расстояния и хранимого параметра изменения фокусного расстояния; и
формирования изображения второго логического сегмента изображения с использованием упомянутого предсказанного значения фокусного расстояния.
17. Устройство по п.16, также включающее светоделитель, сконфигурированный для разделения света, собираемого от образца и проходящего через объектив, на основной путь света и вспомогательный путь света.
18. Устройство по п.16, отличающееся тем, что оно включает цифровой оптический микроскоп.
19. Устройство для формирования изображений, включающее:
объектив;
основной датчик изображений, сконфигурированный для формирования основного изображения образца с частотой смены кадров основного изображения;
вспомогательный датчик изображений, сконфигурированный для формирования одного или более вспомогательного изображения образца с частотой смены вспомогательного изображения, которая является более высокой, чем частота смены кадров основного изображения;
контроллер, сконфигурированный для регулировки значения фокусного расстояния между объективом и образцом вдоль оптической оси для автофокусировки изображения образца;
сканирующий столик для удержания образца и его перемещения по меньшей мере в поперечном направлении, которое по существу ортогонально оптической оси,
при этом упомянутый контроллер включает:
компонент формирования макроизображений и планирования сканирования для определения плана сканирования образца;
компонент автофокусировки для получения и обработки вспомогательных изображений;
компонент управления перемещением для управления перемещением образца относительно объектива; и
компонент синхронизации для синхронизации времени получения вспомогательных изображений, основных изображений или и тех, и других изображений.
20. Устройство по п.19, также включающее модуль получения изображений для получения одного или более основных изображений.
21. Устройство по п.19, отличающееся тем, что оно содержит цифровой оптический микроскоп.
| US 2008069553 A1, 20.03.2008 | |||
| US 2008266652 A1, 30.10.2008 | |||
| US 5886813 A1, 23.03.1999 | |||
| Способ имитирования ценных пород дерева, мрамора и т.п. | 1940 |
|
SU64570A1 |

