Настоящее изобретение относится к системе с двойным шестеренчатым приводом и способу управления, связанному с ней, и, в частности, изобретение относится к упреждающему демпфированию колебаний в системе с двойным шестеренчатым приводом с переменной скоростью.
Системы с двойным шестеренчатым приводом с регулируемой скоростью широко применяются в цементных мельницах, где два привода с переменной скоростью соединены с одной и той же цементной мельницей. На фигуре 1 показан пример такой системы 2, которая содержит первый двигатель 11а, второй двигатель 11b, соответствующие преобразователи 15а и 15b приводов и цементную мельницу 16.
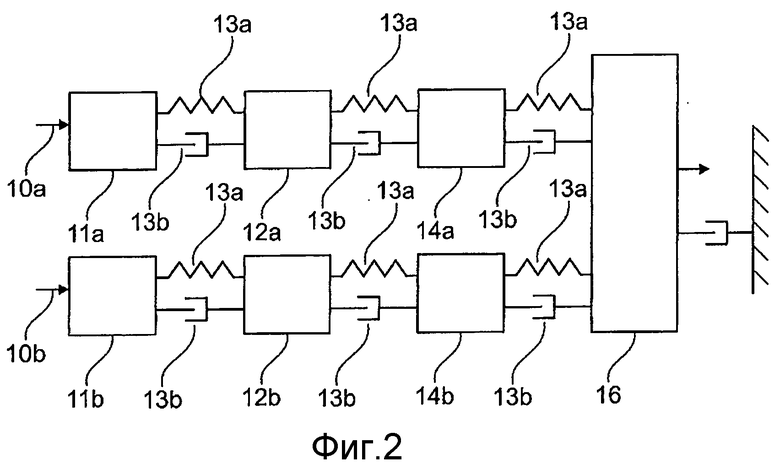
Компоненты такой системы характеризуются рядом физических характеристик, таких как момент инерции, жесткость и демпфирование, и во время своей работы существует взаимосвязь этих характеристик между каждым компонентом внутри системы. На фигуре 2 показана иллюстрация взаимосвязи механических характеристик между компонентами. Компоненты 11а, b двигателя действуют на компонент нагрузки, в этом случае на цементную мельницу 16, через соединение в компонентах 12а, b и соединение снаружи компонентов 14а, b. Каждый из компонентов 11а, b; 12а, b; 14а, b и 16 представляет собой момент инерции внутри системы. Крутящий момент 10а, b передается на приводы 11а, b соответственно и между каждым из двигателей 11а и соединением внутри компонента 12а, соединением внутри компонента 12а и соединением снаружи компонента 14a, соединением снаружи компонента 14а и нагрузкой 16 существует действие механической жесткости 13а и механического демпфирования 13b. Отдача от нагрузки представляет собой крутящий момент нагрузки 18а, а также механическое демпфирование 13b.
В результате взаимосвязи этих механических характеристик внутри системы система с двойным шестеренчатым приводом, имеющая приводы с переменной скоростью, склонна к проблемам, вызванным крутильными колебаниями. Если систему рассматривать как трехмассовую систему, то есть двигатели 11а, 11b и нагрузку 16, система с двойным шестеренчатым приводом проявляет две собственные моды низкочастотного колебания. На первой моде двигатели 11а, 11b осциллируют в противофазе, причем, когда двигатель 11а ускоряется, двигатель 11b замедляется, и наоборот. Это означает, что двигатели 11а, 11b поочередно создают тяговое усилие на нагрузке, что позволяет поддерживать постоянную скорость. Собственная частота систем, которые имеют гибкие соединения и работают на этой моде, часто наблюдалась равной приблизительно 1-5 Гц. На второй моде двигатели 11а, 11b осциллируют в фазе друг с другом, но оказывают противодействие нагрузке 18. Собственная частота системы, работающей на этой моде, наблюдалась равной приблизительно 3-8 Гц, что, как можно увидеть, выше, чем собственная частота первой моды.
Принимая во внимание изменение собственной частоты колебаний систем, работающих на первой моде или второй моде, вид амплитудно-частотной характеристики их конструкции должен учитывать входящие в их состав средства управления, которые позволяют демпфировать обе моды собственного колебания.
На фигуре 3 показана амплитудно-частотная характеристика такой известной системы с двойным шестеренчатым приводом при использовании, например, в мельнице полусамоизмельчения. На графике представлена кривая А, которая иллюстрирует сравнительную характеристику контрольного крутящего момента первого двигателя 11а со скоростью вращения двигателя 11а, и она показывает противофазные и синфазные колебания амплитудно-частотной характеристики. Для сравнения также изображена амплитудно-частотная характеристика в конфигурации с одним шестеренчатым приводом, показанная кривой В. Из кривой А можно увидеть, что помимо собственных мод колебания для трехмассовой системы на частоте приблизительно 240 Гц присутствует высокочастотная мода. Эта высокочастотная мода является результатом гибкого соединения в модели кинематической цепи. Иллюстрация в виде графика главным образом показывает, что источник колебаний на контрольном графике крутящего момента в кинематической цепи имеет потенциальный риск усиления на трех различных частотах. Поэтому важно, чтобы система управления была определена подходящим образом для установления эффективности при демпфировании этих колебаний.
В системе с двойным шестеренчатым приводом с переменной скоростью, такой, которая показана на фигуре 1, двигателями 11а, 11b управляют с использованием конфигурации ведомого компонента, в которой один из двигателей, например двигатель 11а, является ведущим приводом и отвечает за управление скоростью вращения системы на основании выполнения ввода в обычный пропорционально-интегральный (ПИ) регулятор скорости вращения, что означает, что двигатель 11b является ведомым приводом. Скорость вращения ведущего привода вводится в ПИ-регулятор скорости вращения, где она сравнивается с предопределенным заданным значением для вычисления опорного сигнала крутящего момента. Из этого вырабатывается команда крутящего момента с помощью ПИ-регулятора скорости вращения, которая посылается в преобразователь 15а ведущего привода и преобразователь 15b второго привода. Затем преобразователи 15а и 15b, использующие свою существующую внутреннюю систему управления (не показано), вырабатывают необходимые сигналы напряжений для приведения во вращение своих соответствующих двигателей 11а, 11b в соответствии с выработанными командами крутящего момента. На фигуре 4 показана иллюстрация этого процесса.
Недостатком этой топологии управления является то, что, несмотря на параметры настройки ПИ-регулятора скорости вращения, колебания в противофазе не демпфируются, и, таким образом, для системы возникает потенциальный риск. На фигуре 5 показана амплитудно-частотная характеристика скорости вращения двигателя ведомого привода в зависимости от изменений задания скорости в двигателе ведущего привода. Из этого можно увидеть, что характеристика слежения при номинальном заданном значении, которая требуется от системы управления, вызывает значительные колебания в скорости вращения двигателя ведомого привода и, таким образом, нагрузку крутящим моментом, переносимую на валы, соединяющие между собой компоненты системы.
Разрегулировка настроек управления ПИ-регулятора скорости вращения уменьшает амплитуду колебаний, однако в результате разрегулировки характеристики регулирования ухудшаются, выходя за пределы, приемлемые для системы.
Другой подход для преодоления этих проблем включал в себя выполнение всесторонней низкочастотной фильтрации сигналов обратной связи. Низкочастотная фильтрация позволяет демпфировать колебания внутри системы, однако она вызывает эффект замедления общей динамики замкнутого контура системы, что является нежелательным.
Принимая во внимание вышеупомянутое, задачей настоящего изобретения является устранение или смягчение, по меньшей мере, одной из вышеупомянутых проблем.
Согласно первому аспекту настоящего изобретения, выполнена система управления, имеющая первую и вторую электрические машины, систему управления, содержащую компонент регулятора, выполненный с возможностью приема первого сигнала, который относится к измеренному параметру первой электрической машины, и второго сигнала, который относится к контрольному параметру такой первой электрической машины, причем компонент контроллера выполнен с возможностью использования первого сигнала и второго сигнала для получения первого сигнала управления; первый компонент фильтра, который выполнен с возможностью приема такого первого сигнала из такой первой электрической машины и использования принятого первого сигнала для получения второго сигнала управления; первый выходной компонент, который выполнен с возможностью приема такого первого сигнала управления и такого второго сигнала управления и объединения упомянутого первого и второго сигналов управления для получения первого выходного сигнала управления с целью подачи в упомянутую первую электрическую машину, причем система управления дополнительно содержит второй компонент фильтра, выполненный с возможностью приема третьего сигнала, который относится к измеренному параметру второй электрической машины из упомянутой второй электрической машины, и использования третьего сигнала для получения третьего сигнала управления; и второй выходной компонент, выполненный с возможностью приема такого первого сигнала управления и такого третьего сигнала управления и объединения такого первого и третьего сигналов управления для получения второго выходного сигнала управления с целью подачи во вторую электрическую машину.
В целях удобства, первый выходной сигнал управления подается в первый компонент преобразователя, выполненный с возможностью привода упомянутой первой электрической машины, и второй выходной сигнал управления подается во второй компонент преобразователя, выполненный для привода упомянутой второй электрической машины.
Размещение компонента управления и первого компонента фильтра и второго компонента фильтра в этой системе управления действует для устранения кратковременных выбросов в аспекте первого измеренного параметра, который формирует первый сигнал, когда система управления реализована с компонентом преобразователя, выполненного с возможностью привода первой и второй электрических машин и устранения кратковременных выбросов в аспекте второго измеренного параметра, который формирует третий сигнал, когда система управления реализована с компонентом преобразователя, выполненным с возможностью привода второй электрической машины.
Предпочтительно, компонент управления представляет собой пропорционально-интегральный регулятор, причем каждый компонент фильтра может быть полосовым фильтром, и каждый компонент преобразователя может быть компонентом силового электронного преобразователя.
Первый сигнал может содержать измеренную скорость вращения первой электрической машины, второй сигнал может содержать контрольную скорость вращения первой машины, и третий сигнал может содержать измеренную скорость вращения второй электрической машины.
Предпочтительно, каждый выходной сигнал управления представляет собой команду крутящего момента.
Первая и вторая электрические машины могут быть механически соединены с нагрузкой, и посредством этого первую и вторую электрические машины можно рассматривать механически соединенными друг с другом. Каждое механическое соединение может быть гибким соединением.
Следует понимать, что термин гибкое соединение, которое также широко известно как упругая муфта, относится к такому размещению механического соединения, которое передает крутящий момент от двигателя к нагрузке, которая приводится во вращение с учетом несоосностей между валами двигателя и нагрузкой, а также устраняет резонансы и демпфирует вибрации. Обычно такое гибкое соединение приводит к увеличению срока службы машинного оборудования, которое оно соединяет, и также часто обеспечивает выигрыш, полученный от минимизации требований к техническому обслуживанию.
Система управления может содержать более двух электрических машин и, например, может содержать n электрических машин, где n - целое число, которое больше или равно 2. В такой системе управления (n+1)-й компонент фильтра выполнен с возможностью приема (n+1)-го сигнала, который относится к измеренному параметру n-ой электрической машины из этой n-ой электрической машины, и использования (n+1)-го сигнала для получения (n+1)-го сигнала управления; и n-й выходной компонент выполнен с возможностью приема такого первого сигнала управления и такого (n+1)-го сигнала управления и объединения такого первого и (n+1)-го сигналов управления для получения n-го выходного сигнала управления с целью подачи в n-ую электрическую машину.
Согласно второму аспекту настоящего изобретения выполнен способ управления механической системой, имеющей первую и вторую электрические машины, причем способ содержит этапы, на которых:
принимают первый сигнал, который относится к первому измеренному параметру первой электрической машины;
принимают второй сигнал, который относится к первому контрольному параметру первой электрической машины;
получают первый сигнал управления из первого и второго сигналов с использованием компонента контроллера;
получают второй сигнал управления из первого сигнала с использованием компонента фильтра;
получают первый выходной сигнал управления из первого и второго сигналов управления с использованием первого выходного компонента;
подают первый выходной сигнал управления в первую электрическую машину; и
принимают третий сигнал, который относится ко второму измеренному параметру второй электрической машины; получают третий сигнал управления из третьего сигнала с использованием компонента фильтра; получают второй выходной сигнал управления из первого и третьего сигналов управления с использованием второго выходного компонента и подают второй выходной сигнал управления во вторую электрическую машину.
За счет получения первого выходного сигнала управления из первого сигнала управления и второго сигнала управления и второго выходного сигнала управления из первого сигнала управления и третьего сигнала управления, устраняются кратковременные выбросы в аспекте первого измеренного параметра, и устраняются кратковременные выбросы в аспекте второго измеренного параметра, когда система управления реализована с компонентом преобразователя с возможностью привода электрической машины.
В этом способе каждая первая и вторая электрическая машина может быть механически соединена с нагрузкой, и посредством этого каждая из них может быть механически связана друг с другом через нагрузку. Каждое механическое соединение может представлять собой упругую муфту.
Согласно третьему аспекту настоящего изобретения выполнен контроллер для управления механической системой, которая включает в себя первый и второй электродвигатели, которые механически соединены друг с другом, причем контроллер выполнен с возможностью подачи сигналов управления в первый и второй электродвигатели с использованием обратной связи по скорости вращения и самонастраивающегося адаптивного фильтра с положительной обратной связью. Каждое механическое соединение может представлять собой гибкое соединение.
Согласно четвертому аспекту настоящего изобретения выполнен способ управления механической системой, которая включает в себя первый и второй электродвигатели, которые механически соединены друг с другом, причем способ включает в себя этап, на котором подают сигналы управления в первый и второй электродвигатели с использованием обратной связи по скорости вращения и метода самонастраивающегося адаптивного фильтра с положительной обратной связью. Каждое механическое соединение может представлять собой гибкое соединение.
Эти и другие аспекты настоящего изобретения станут очевидными из приведенного ниже описания со ссылкой на сопроводительные чертежи, на которых:
фигура 1 - известная система с двойным шестеренчатым приводом для цементной мельницы;
фигура 2 - схема взаимосвязи механических характеристик компонентов системы, которая показана на фигуре 1;
фигура 3 - графическое представление амплитудно-частотной характеристики известной системы с двойным шестеренчатым приводом по сравнению с амплитудно-частотной характеристикой системы с одиночным шестеренчатым приводом;
фигура 4 - схема известного процесса управления для системы с двойным шестеренчатым приводом типа ведущий-ведомый;
фигура 5 - графическое представление амплитудно-частотной характеристики скорости вращения ведомого двигателя системы, показанной на фигуре 4;
фигура 6 - система управления для электрической машины согласно второму варианту осуществления настоящего изобретения;
фигура 7А - графическое представление амплитудно-частотной характеристики ведущего двигателя электрической машины, управляемой с помощью системы управления, показанной на фигуре 6; и
фигура 7В - графическое представление амплитудно-частотной характеристики ведомого двигателя электрической машины, управляемой с помощью системы управления, показанной на фигуре 6.
На фигуре 6 показана система 40 управления для использования с системой с двойным шестеренчатым приводом, такой как цементная мельница с двойным шестеренчатым приводом. В качестве примера будет рассмотрена система с двойным шестеренчатым приводом типа ведущий-ведомый, такая как цементная мельница, показанная на фигуре 1. Система 40 управления воздействует как на ведущий двигатель 11а, так и на ведомый двигатель 11b системы 2 с двойным шестеренчатым приводом.
Для того чтобы противодействовать колебаниям в системе 2 с двойным шестеренчатым приводом дополнительным улучшенным образом, система 40 управления выполнена с ПИ-регулятором 42, размещенным параллельно ведущему полосовому фильтру 44 и ведомому полосовому фильтру 45. Система 40 управления дополнительно выполнена с ведущим выходным вычислителем 48 и ведомым выходным вычислителем 49. В любой заданный момент времени при работе системы 40 управления измерение скорости 52 вращения главного двигателя (11a на фигуре 1) выполняется как в ПИ-регуляторе 42, так и в ведущем полосовом фильтре 44. Контрольное значение 54 для скорости вращения также подается в ПИ-регулятор. Измерение скорости 53 вращения ведомого двигателя (11b на фигуре 1) выполняется в ведомом полосовом фильтре 45. ПИ-регулятор использует контрольное значение 54 и первое измерение 52 для выработки первого выходного сигнала 56. Ведущий полосовой фильтр использует первое измерение 52 для выработки второго выходного сигнала 58. Ведомый полосовой фильтр использует второе измерение 53 для выработки третьего выходного сигнала 59. В этом случае зависимость ведущего полосового фильтра 44 является такой же, как и ведомого полосового фильтра 45, то есть:

где Kd - коэффициент передачи фильтра и f0 - частота демпфируемых колебаний. Простые параметры настройки а и b можно использовать для дальнейшей настройки характеристик фильтра. Первый выходной сигнал 56 и второй выходной сигнал 58 затем подаются в ведущий выходной вычислитель 48, который использует предоставленную информацию для выработки выходной ведущей команды 60 крутящего момента, которая в свою очередь будет подаваться в ведущий двигатель 11а через управляемый силовой электронный преобразователь 12а. Первый выходной сигнал 56 и третий выходной сигнал 59 подаются в ведомый выходной вычислитель 49, который использует предоставленную информацию для выработки выходной ведомой команды 61 крутящего момента, которая затем подается в ведомый двигатель 11b через управляемый силовой электронный преобразователь 12b.
Так как система 40 управления действует в дискретные промежутки времени, то ее работа представляет собой итерационный процесс, повторяющийся с периодом квантования алгоритма управления, который в случае крутильных колебаний будет составлять приблизительно 1 мс. Система управления на основе силового электронного преобразователя (не показана), который отвечает за фактический привод цементной мельницы таким образом, чтобы получался требуемый крутящий момент, имеет период квантования, возможно, 25 мкс.
Работа системы 40 управления приводит к эффекту демпфирования качаний на амплитудно-частотной характеристике скорости вращения ведущего двигателя, который фактически устраняет кратковременные выбросы на амплитудно-частотной характеристике для скорости вращения ведущего двигателя 11а, а также к эффекту демпфирования качаний на амплитудно-частотной характеристике скорости вращения ведомого двигателя, который аналогичным образом устраняет кратковременные выбросы на амплитудно-частотной характеристике для скорости вращения ведомого двигателя. Графическое представление этого эффекта изображено на фигуре 7А и 7В соответственно.
В системе 40 управления главная команда крутящего момента для системы по-прежнему выдается из ведущего выходного вычислителя 48. Однако дополнительный контур обратной связи для ведомого двигателя действует для того, чтобы увеличить подавление колебаний внутри системы 2 за счет того, что система управления может демпфировать собственную моду колебания в скоростях вращения как ведущего, так и ведомого привода в системе с двойным шестеренчатым приводом.
Система управления, показанная на фигуре 6, обеспечивает способ упреждающего управления демпфированием колебаний, который действует на команды крутящего момента, подаваемые на каждый из двигателей в системе с двойным шестеренчатым приводом, таким образом, уменьшая нежелательные крутильные колебания вдоль валов двигателей, которые соединяют двигатели с приводимой во вращение нагрузкой, например с цементной мельницей, показанной на фигуре 1. Более того, подробно описанные системы управления позволяют уменьшить крутильные колебания в нагрузке.
В размещении, подробно показанном на фигуре 6, систему управления можно реализовать на любой печатной плате, подходящей для использования с системами приводов среднего напряжения (MV). Альтернативно в соответствующих приложениях можно использовать платформу для управления приводами низкого напряжения.
Следует иметь в виду, что в размещении, подробно показанном на фигуре 6 по отношению к фигуре 1, ведущий и ведомый двигатели 11а и 11b механически соединены друг с другом через механическую нагрузку, которую они приводят во вращение, в этом случае цементную мельницу 16. При таком размещении механическое соединение будет, вероятно, гибким соединением, которое также обычно называют упругой муфтой. Гибкое соединение передает крутящий момент от двигателя 11а или 11b к нагрузке 16, которая приводится во вращение с допустимыми несоосностями между валами двигателя и нагрузки, а также с возможностью устранения резонансов и демпфирования вибраций. Обычно такое гибкое соединение приводит к увеличению срока службы машинного оборудования, которое оно соединяет, и часто также обеспечивает выигрыш, полученный от минимизации требований к техническому обслуживанию.
Следует дополнительно оценить, что система управления может содержать более двух двигателей и, например, может содержать n двигателей, где n - целое число, которое больше или равно 2. В такой системе управления, содержащей n двигателей, (n+1)-й компонент фильтра выполнен с возможностью приема (n+1)-го сигнала, который относится к измеренному параметру (n+1)-го двигателя из этого n-го двигателя, и использования (n+1)-го сигнала для получения (n+1)-го сигнала управления; и n-й выходной компонент выполнен с возможностью приема такого первого сигнала управления и такого (n+1)-го сигнала управления и объединения такого первого и (n+1)-го сигналов управления для получения (n+1)-го выходного сигнала управления с целью подачи в n-й двигатель.
В вышеописанных вариантах осуществления можно выполнить различные модификации без отклонения от объема настоящего изобретения. Например, хотя варианты осуществления системы управления были описаны со ссылкой на цементную мельницу с двойным шестеренчатым приводом, любое оборудование, имеющее двойной шестеренчатый привод, получит выгоду от преимуществ системы управления. Кроме того, следует оценить, что хотя приведенные выше варианты осуществления были подробно описаны как имеющие гибкое механическое соединение между двигателями и соответствующими нагрузками, которые они приводят во вращение, можно использовать и другие размещения с механическими соединениями.






Изобретение относится к системе с двойным шестеренчатым приводом и способу управления, связанному с ней, и, в частности, изобретение относится к упреждающему демпфированию колебаний в системе с двойным шестеренчатым приводом с переменной скоростью. Технический результат - уменьшение нежелательных крутильных колебаний вдоль валов двигателей. Система управления для управления электрической машиной содержит компонент регулятора, принимающий два сигнала, из которых получают первый сигнал управления; первый компонент фильтра, принимающий первый сигнал, из которого получают второй сигнал управления; второй компонент фильтра, принимающий третий сигнал; первый выходной компонент, объединяющий первый и второй сигналы управления для получения первого выходного сигнала управления для подачи в первую электрическую машину и второй выходной компонент, принимающий первый и третий сигналы управления для получения второго выходного сигнала управления с целью подачи во вторую электрическую машину. 2 н. и 13 з.п. ф-лы, 8 ил.
1. Система управления для управления механической системой, имеющей первую и вторую электрические машины (11а, 11b), содержащая компонент регулятора (42), первый выходной компонент (48) и второй выходной компонент (49), отличающаяся тем, что система управления также содержит первый компонент фильтра (44) и второй компонент фильтра (45), при этом
компонент регулятора (42) выполнен с возможностью приема первого сигнала (52), который относится к измеренному параметру первой электрической машины (11а), и второго сигнала (54), который относится к контрольному параметру такой первой электрической машины (11а), причем компонент регулятора (42) выполнен с возможностью использования первого сигнала (52) и второго сигнала (54) для получения первого сигнала управления (56); причем
первый компонент фильтра (44) выполнен с возможностью приема такого первого сигнала (52) из такой первой электрической машины (11а) и использования первого принятого сигнала (52) для получения второго сигнала управления (58);
второй компонент фильтра (45) выполнен с возможностью приема третьего сигнала (53), который относится к измеренному параметру второй электрической машины (11b) из этой второй электрической машины (11b) и использования третьего сигнала (53) для получения третьего сигнала управления (59);
первый выходной компонент (48) выполнен с возможностью приема такого первого сигнала управления (56) и такого второго сигнала управления (58) и объединения первого и второго сигналов управления (56, 58) для получения первого выходного сигнала управления (60) для подачи в первую электрическую машину (11а); и
второй выходной компонент (49) выполнен с возможностью приема такого первого сигнала управления (56) и такого третьего сигнала управления (59) и объединения таких первого и третьего сигналов управления (56, 59) для получения второго выходного сигнала управления (61) для подачи во вторую электрическую машину (11b).
2. Система управления по п.1, отличающаяся тем, что первый сигнал (52) содержит измеренную скорость вращения такой первой электрической машины (11а), второй сигнал (54) содержит контрольную скорость вращения такой первой электрической машины (11а) и третий сигнал (53) содержит измеренную скорость вращения такой второй электрической машины (11b).
3. Система управления по п.1 отличающаяся тем, что третий сигнал содержит контрольную скорость вращения.
4. Система управления по любому из пп.1-3, отличающаяся тем, что комбинация первого и второго сигналов управления (56, 58) в первом выходном компоненте (48) для получения первого выходного сигнала управления (60) содержит вычитание второго сигнала управления (58) из первого сигнала управления (56).
5. Система управления по любому из пп.1-3, отличающаяся тем, что первый компонент фильтра (44) и второй компонент фильтра (45) каждый содержит полосовой фильтр.
6. Система управления по любому из пп.1-3, отличающаяся тем, что зависимости фильтра первого компонента фильтра (44) и второго компонента фильтра (45) содержат частоту собственных колебаний механической системы.
7. Система управления по п.6, отличающаяся тем, что зависимости фильтра первого компонента фильтра (44) и второго компонента фильтра (45) содержат первую частоту собственных колебаний механической системы.
8. Система управления по любому из пп.1-3, отличающаяся тем, что механическая система содержит систему с двойным шестеренчатым приводом.
9. Система управления по п.8, отличающаяся тем, что механическая система содержит систему с двойным шестеренчатым приводом для цементной мельницы.
10. Система управления по любому из пп.1-3, отличающаяся тем, что компонент регулятора (42) содержит ПИ-регулятор.
11. Система управления по любому из пп.1-3, отличающаяся тем, что каждая первая и вторая электрические машины механически соединены с нагрузкой.
12. Система управления по любому из пп.1-3, отличающаяся тем, что каждая первая и вторая электрические машины действуют на нагрузку, в которой первая и вторая электрические машины механически соединены друг с другом через нагрузку.
13. Система управления по п.12, отличающаяся тем, что каждое механическое соединение представляет собой гибкое соединение.
14. Система управления по п.13, отличающаяся тем, что каждое механическое соединение представляет собой гибкое соединение.
15. Способ управления механической системой, имеющей первую и вторую электрические машины, включающий этапы, на которых:
принимают первый сигнал, относящийся к измеренной скорости вращения первой электрической машины;
принимают второй сигнал, относящийся к первой контрольной скорости вращения первой электрической машины;
принимают третий сигнал, относящийся к измеренной скорости вращения второй электрической машины;
получают первый сигнал управления из первого и второго сигналов с использованием компонента регулятора;
получают второй сигнал управления из первого сигнала с использованием первого компонента фильтра;
получают третий сигнал управления из третьего сигнала с использованием второго компонента фильтра;
получают первый выходной сигнал управления из первого и второго сигналов управления с использованием первого выходного компонента;
получают второй выходной сигнал управления из первого и третьего сигналов управления с использованием второго выходного компонента;
подают первый выходной сигнал управления в первую электрическую машину; и
подают второй выходной сигнал управления во вторую электрическую машину.
| US 7569999 B2, 04.08.2009 | |||
| Способ дозирования сыпучих материалов и устройство для его осуществления | 1990 |
|
SU1742128A1 |
| US 7629705 B2, 08.12.2009 | |||
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОПРИВОДА | 1998 |
|
RU2158055C2 |
| КОММУТИРУЕМЫЙ СИНХРОННЫЙ ГЕНЕРАТОР С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ НЕСИНУСОИДАЛЬНОСТЬЮ НАПРЯЖЕНИЯ | 2006 |
|
RU2310972C1 |

