Изобретение относится к технической кибернетике и может быть использовано в системах автоматического управления априорно неопределенными нестационарными динамическими объектами периодического действия.
Наиболее близким техническим решением к предлагаемому является комбинированная система управления для априорно неопределенных нестационарных динамических объектов (Патент РФ на ПМ №100644, Официальный бюл. «Изобретения и полезные модели». - 2010, №35, прототип), содержащая блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок усиления, блок задержки, третий блок суммирования, второй умножитель и объект регулирования, выходы которого соединены с соответствующими входами блока задания коэффициентов, выходы блока задания коэффициентов связаны с входами первого блока суммирования, выход которого подключен к первому и второму входам первого умножителя и второму входу второго умножителя, выход первого умножителя связан с первым входом второго блока суммирования и входом блока усиления, выход второго блока суммирования подключен к первому входу третьего блока суммирования и к входу блока задержки, выход которого соединен с вторым входом второго блока суммирования, второй вход третьего блока суммирования соединен с выходом блока усиления, выход третьего блока суммирования связан с первым входом второго умножителя, выход которого подключен к входу объекта регулирования.
Однако недостатком данной системы является формирование в первоначальный момент функционирования управляющего сигнала большой амплитуды, что не всегда оказывается эффективным.
Технической задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей системы, в частности обеспечение более точной настройки параметров регулятора, что позволит сформировать качественный сигнал управления.
Решение поставленной задачи достигается за счет того, что из системы, содержащей блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок усиления, блок задержки, третий блок суммирования, второй умножитель и объект регулирования, согласно изобретению, исключается блок усиления и дополнительно вводятся интегратор и третий умножитель, при этом выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы которого подключены к входам первого блока суммирования, выход первого блока суммирования связан с первым и вторым входом первого умножителя и вторым входом второго умножителя, выход первого умножителя соединен с первым входом второго блока суммирования и вторым входом третьего блока суммирования, выход второго блока суммирования одновременно связан с входом интегратора, вторым входом третьего умножителя, а также входом блока задержки, выход которого подключен к второму входу второго блока суммирования, выход интегратора соединен с первым входом третьего умножителя, выход которого связан с первым входом третьего блока суммирования, выход третьего блока суммирования подключен к первому входу второго умножителя, выход которого соединен с входом объекта регулирования.
Исключение из системы блока усиления и введение в нее интегратора и дополнительного умножителя позволяет построить систему управления априорно неопределенными нестационарными динамическими объектами периодического действия, в которой, в сравнении с прототипом, обеспечивается более точная настройка параметров регулятора и формируется более качественный сигнал управления.
Сущность изобретения поясняется чертежом, где на фиг.1 представлена блок-схема системы управления. Система содержит: объект регулирования 1, блок задания коэффициентов 2, первый блок суммирования 3, первый умножитель 4, второй умножитель 5, второй блок суммирования 6, третий блок суммирования 7, блок задержки 8, интегратор 9, третий умножитель 10, u - управляющее воздействие, y1,…, ym - выходные сигналы объекта регулирования, f - внешние возмущения.
Объект регулирования описывается уравнением

где x(t) - n-мерный вектор состояний объекта регулирования;
A(t+T), b(t+Т) - соответственно нестационарные матрица состояния (неустойчивая) и вектор управления, с T-периодически меняющимися коэффициентами;
f(t) - вектор внешних постоянно действующих возмущений, удовлетворяющий условию
f*(t)=[0,…,0,fn(t)];

fn - некоторая положительная константа.
y(t) - m-мерный вектор выхода объекта регулирования;
L - матрица выхода;
* - символ транспонирования;
u(t) - скалярное управляющее воздействие, удовлетворяющее соотношению:

где k(t), χпер(t) - настраиваемые коэффициенты контура управления;
χроб(t) - робастная часть регулятора;
α0 - m-мерный вектор коэффициентов блока задания коэффициентов выбираемый из условия: 
s - комплексная переменная.
Используя критерий гиперустойчивости В.М.Попова, можно показать, что устойчивость рассматриваемой системы управления обеспечивается за счет реализации алгоритмов контура (3) в виде:


где γ0, γ1, γ2=const>0.
Система функционирует следующим образом.
Сигналы с выходов объекта регулирования 1 поступают на соответствующие входы блока задания коэффициентов 2, внутри которого происходит умножение i-го сигнала на постоянный коэффициент αi, i-1,…,n. Выходные сигналы блока задания коэффициентов 2 идут на входы первого блока суммирования 3, где складываются. Сигнал с выхода первого блока суммирования 3 подается на первый и второй входы первого умножителя 4 и на второй вход второго умножителя 5. Выходной сигнал первого умножителя 4 с соответствующими коэффициентами идет на первый вход второго блока суммирования 6 и на второй вход третьего блока суммирования 7. Сигнал с выхода второго блока суммирования 6 поступает на второй вход третьего умножителя 10, вход блока задержки 8, а также с соответствующим коэффициентом на вход интегратора 9. Выходной сигнал блока задержки 8 подается на второй вход второго блока суммирования 6. Сигнал с выхода интегратора 9 идет на первый вход третьего умножителя 10. Выходной сигнал третьего умножителя 10 подается на первый вход третьего блока суммирования 7, сигнал с выхода которого идет на первый вход второго умножителя 5. Выходной сигнал второго умножителя 5 поступает на вход объекта регулирования 1.
Технический результат заключается в обеспечении более точной настройки параметров регулятора, позволяющей добиться формирования более качественного сигнала управления.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Изобретение относится к технической кибернетике и может быть использовано в системах автоматического управления априорно неопределенными нестационарными динамическими объектами периодического действия. Технический результат заключается в расширении функциональных возможностей системы, в частности обеспечении более точной настройки параметров регулятора, что позволит сформировать качественный сигнал управления. Результат достигается за счет того, что система содержит блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, третий блок суммирования, второй умножитель и объект регулирования. При этом согласно изобретению, исключается блок усиления и дополнительно вводятся интегратор и третий умножитель, при этом выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы которого подключены к входам первого блока суммирования, выход первого блока суммирования связан с первым и вторым входами первого умножителя и вторым входом второго умножителя, выход первого умножителя соединен с первым входом второго блока суммирования и вторым входом третьего блока суммирования, выход второго блока суммирования одновременно связан с входом интегратора, вторым входом третьего умножителя, а также входом блока задержки, выход которого подключен к второму входу второго блока суммирования, выход интегратора соединен с первым входом третьего умножителя, выход которого связан с первым входом третьего блока суммирования, выход третьего блока суммирования подключен к первому входу второго умножителя, выход которого соединен с входом объекта регулирования. 1 ил.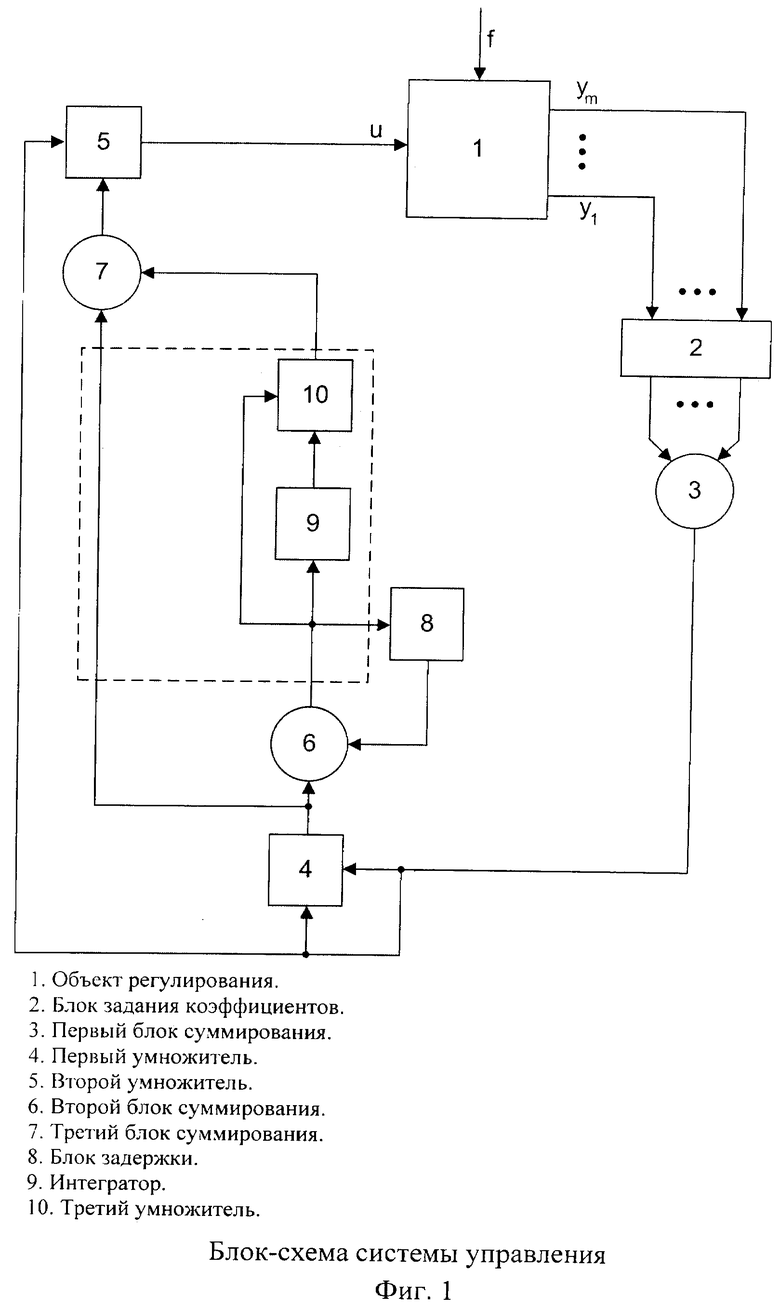
Адаптивно-робастная система управления для априорно неопределенных нестационарных динамических объектов, содержащая блок задания коэффициентов, первый блок суммирования, первый умножитель, второй блок суммирования, блок задержки, третий блок суммирования, второй умножитель и объект регулирования, отличающаяся тем, что из системы исключается блок усиления и дополнительно вводятся интегратор и третий умножитель, при этом выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы которого подключены к входам первого блока суммирования, выход первого блока суммирования связан с первым и вторым входом первого умножителя и вторым входом второго умножителя, выход первого умножителя соединен с первым входом второго блока суммирования и вторым входом третьего блока суммирования, выход второго блока суммирования одновременно связан с входом интегратора, вторым входом третьего умножителя, а также входом блока задержки, выход которого подключен к второму входу второго блока суммирования, выход интегратора соединен с первым входом третьего умножителя, выход которого связан с первым входом третьего блока суммирования, выход третьего блока суммирования подключен к первому входу второго умножителя, выход которого соединен с входом объекта регулирования.
| Электронный усилитель | 1954 |
|
SU100644A1 |
| Прибор для измерения толщины стенок бутылей | 1957 |
|
SU112781A1 |
| КОМБИНИРОВАННАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С НАБЛЮДАТЕЛЕМ | 2012 |
|
RU2474858C1 |
| КОМБИНИРОВАННАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2475798C1 |
| US 6668200 B2, 23.12.2003 | |||
| US 5276387 A1, 04.01.1994 | |||
| US 5285379 A1, 08.02.1994 | |||
| US 5442270 A1, 18.05/1995 | |||
| US 5992383 A1, 30.11.1999 | |||

