Изобретение относится к системам автоматического управления и может быть использовано при построении адаптивных систем управления неустойчивыми линейными динамическими объектами периодического действия с относительным порядком передаточной функции, превышающим единицу.
Наиболее близким техническим решением к предлагаемому является адаптивная система управления для динамических объектов с периодическими коэффициентами (Патент РФ №2427870, официальный бюл. «Изобретения и полезные модели». - 2011, №24, прототип), содержащая объект регулирования, блок задания коэффициентов, первый блок суммирования, последовательный фильтр-компенсатор (ПФК), первый умножитель, второй блок суммирования, блок задержки, второй умножитель, при этом выходы объекта регулирования соединены с соответствующими входами блока задания коэффициентов, выходы блока задания коэффициентов подключены к входам первого блока суммирования, выход которого соединен с первым и вторым входами первого умножителя и вторым входом второго умножителя, выход первого умножителя подключен к первому входу второго блока суммирования, выход второго блока суммирования соединен с первым входом второго умножителя, а также входом блока задержки, выход которого подключен ко второму входу второго блока суммирования, выход второго умножителя соединен с входом объекта регулирования.
Однако недостатком данной системы является потеря работоспособности при управлении неустойчивыми динамическими объектами, а также невозможность точной компенсации нестационарных изменений внутренних коэффициентов объектами управления с целью обеспечения высокого качества работы системы.
Задачей, на решение которой направлено заявленное изобретение, является расширение функциональных возможностей системы, т.е. обеспечение устойчивости системы управления и точной компенсации нестационарных изменений внутренних коэффициентов объекта регулирования за счет получения и использования оценок его переменных состояния.
Сущность изобретения состоит в том, что в адаптивную систему управления с фильтр-корректором (ФК) для априорно неопределенных динамических объектов с периодическими коэффициентами, содержащую объект регулирования, блок задания коэффициентов, первый блок суммирования, введены: фильтр-корректор (ФК), n первых умножителей, n вторых умножителей, n третьих умножителей, n четвертых умножителей, n вторых блоков суммирования, n блоков задержки, n интеграторов (n - размерность вектора состояния объекта регулирования) и третий блок суммирования, при этом выходы объекта регулирования подключены к соответствующим входам блока задания коэффициентов, выходы блока задания коэффициентов соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к входу четвертого блока суммирования ФК, выход которого соединен с входом n-1 интегратора ФК и является последним n-м выходом ФК, выход j интегратора ФК (j=n-1, n-2, …, 2) связан с входом последующего j-1 интегратора ФК с соответствующим коэффициентом, с k-м (k=2, 3, …, n-1) входом четвертого блока суммирования ФК, а также является j-м выходом ФК, выход первого интегратора ФК с соответствующим коэффициентом связан с последним n-м входом четвертого блока суммирования ФК, а также является первым выходом ФК; каждый из n выходов ФК соединен с первым и вторым входами соответствующего i-го (i=1, 2, …, n) первого и третьего умножителей, а также вторым входом каждого i-го второго и четвертого умножителей, выход каждого i-го первого умножителя подключен к первому входу i-го второго блока суммирования, выход которого одновременно соединен с первым входом i-го второго умножителя и входом i-го блока задержки, выход i-го блока задержки подключен к второму входу i-го второго блока суммирования, выход каждого i-го второго умножителя соединен с соответствующим входом третьего блока суммирования; выход каждого i-го третьего умножителя подключен к входу соответствующего i-го интегратора, выход каждого i-го интегратора соединен с первым входом соответствующего i-го четвертого умножителя, выходы каждого i-го четвертого умножителя подключены к соответствующим входам третьего блока суммирования, выход которого подключен к входу объекта регулирования.
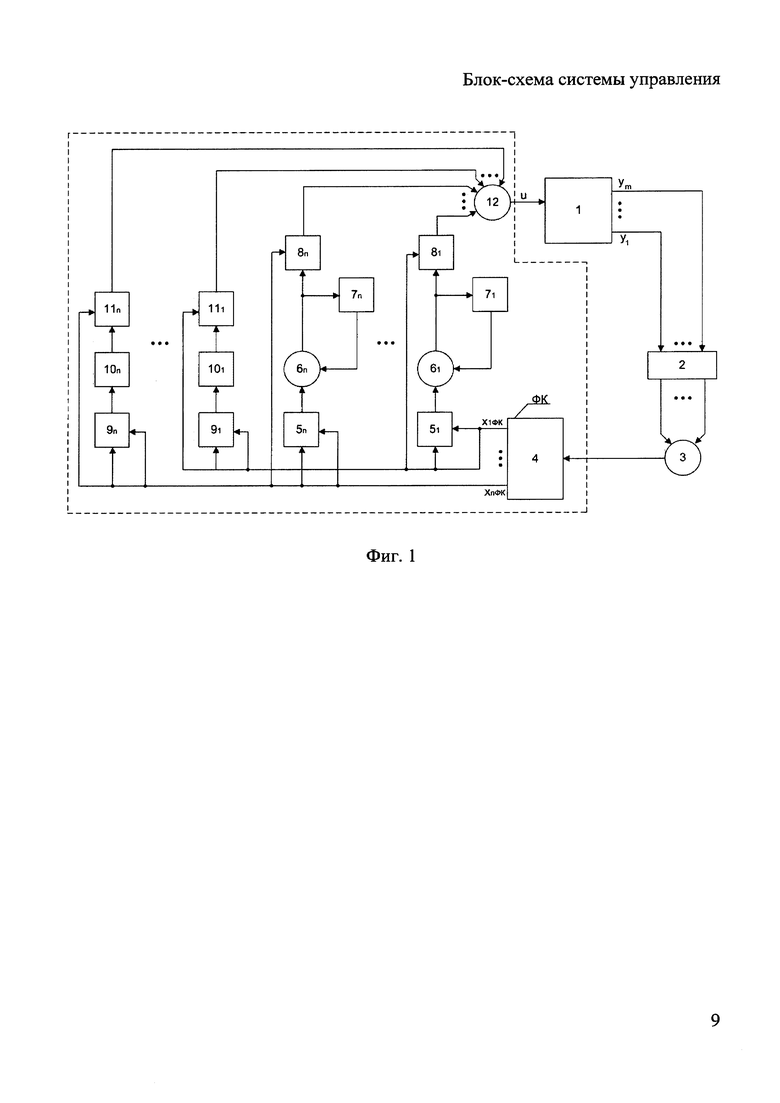
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена блок-схема системы управления; на фиг. 2 изображена блок-схема ФК. Система содержит: объект регулирования 1; блок задания коэффициентов 2; первый блок суммирования 3; ФК 4; первые умножители 51, …, 5n; вторые блоки суммирования 61, …, 6n; блоки задержки 71, …, 7n; вторые умножители 81, …, 8n; третьи умножители 91, …, 9n; интеграторы 101, …, 10n; четвертые умножители 111, …, 11n; третий блок суммирования 12; четвертый блок суммирования ФК 13; интеграторы ФК 141, …, 14n-1; y1, …, ym - выходные сигналы объекта регулирования; x1ФК, …, хnФК - выходные сигналы фильтр-корректора; u - входной сигнал объекта регулирования.
Объект регулирования описывается уравнением:

где x(t) - n-мерный вектор состояния;
A(t+Т), b(t+Т) - соответственно нестационарные матрица и вектор, элементы которых являются T-периодическими функциями времени; собственные числа матрицы A могут иметь положительную вещественную часть;
y(t) - вектор выходных координат объекта;
* - символ транспонирования;
L - вектор, формирующий выход объекта;
u(t) - управляющее воздействие, удовлетворяющее соотношению:
где χпер(t), χинт(t) - векторы настраиваемых параметров контура адаптации; хФК(t) - вектор оценок переменных состояния объекта регулирования (1), полученных с помощью ФК

где АФК - матрица в форме Фробениуса; bФК, LФК - стационарные векторы.
С помощью критерия гиперустойчивости В.М. Попова можно показать, что реализация алгоритмов самонастройки компонентов векторов χпер(t) и χинт(t) регулятора (2) в виде

где γ0i, γ1i - некоторые постоянные положительные величины; обеспечит точную компенсацию изменений внутренних параметров объекта регулирования и устойчивость системы управления.
Система функционирует следующим образом.
Сигналы y1, …, ym с выхода объекта регулирования 1 подаются на входы блока задания коэффициентов 2, внутри которого происходит их умножение на постоянный коэффициент, выходные сигналы с блока задания коэффициентов 2 поступают на соответствующие входы первого блока суммирования 3, сигнал с выхода которого идет на вход ФК 4. Входной сигнал ФК 4 (структурная схема представлена на фиг. 2) поступает на первый вход четвертого блока суммирования ФК 13, выходной сигнал xnфК четвертого блока суммирования ФК 13 одновременно подается на вход интегратора ФК 14n-1 и на последний выход ФК 4, сигналы xjФК с выходов интеграторов ФК 14j (j=n-1, n-2, …, 2) поступают на вход последующего интегратора ФК 14j-1 с соответствующим коэффициентом на k-й (k=2, 3, …, n-1), вход четвертого блока суммирования ФК 13, а также на соответствующий j-й выход ФК 4, выходной сигнал x1ФК интегратора ФК 141 подается с соответствующим коэффициентом на последний n-й вход четвертого блока суммирования ФК 13, а также на первый выход ФК 4. Выходные сигналы x1ФК, …, xnФК ФК 4 одновременно поступают на первый и второй входы первых умножителей 51, …, 5n, на первый и второй входы третьих умножителей 91, …, 9n, на вторые входы вторых умножителей 81, …, 8n, а также на вторые входы четвертых умножителей 111, …, 11n, сигналы с выходов первых умножителей 51, …, 5n с соответствующими коэффициентами γ0i идут на первые входы вторых блоков суммирования 61, …, 6n, выходные сигналы которых подаются на первые входы вторых умножителей 81, …, 8n и на входы блоков задержки 71, …, 7n, сигналы с выходов блоков задержки 71, …, 7n идут на вторые входы вторых блоков суммирования 61, …, 6n, выходные сигналы вторых умножителей 81, …, 8n поступают на соответствующие входы третьего блока суммирования 12, сигналы с выходов третьих умножителей 91, …, 9n с соответствующими коэффициентами γ1i подаются на входы интеграторов 101, …, 10n, выходные сигналы которых идут на первые входы соответствующих четвертых умножителей 111, …, 11n, сигналы с выходов четвертых умножителей 111, …, 11n поступают на соответствующие входы третьего блока суммирования 12, сигнал u с выхода которого подается на вход объекта регулирования 1.
Таким образом, заменяя в системе, содержащей объект регулирования, блок задания коэффициентов, первый блок суммирования, последовательный фильтр-компенсатор (ПФК), первый умножитель, второй блок суммирования, блок задержки, второй умножитель, последовательный фильтр-компенсатор (ПФК) на фильтр-корректор (ФК), вводя вместо первого и второго умножителей, второго блока суммирования, блока задержки - n первых умножителей, n вторых умножителей, n третьих умножителей, n четвертых умножителей, n вторых блоков суммирования, n блоков задержки, n интеграторов (n - размерность вектора состояния объекта регулирования), а также третий блок суммирования, обеспечиваем устойчивость системы управления и точную компенсацию нестационарных изменений внутренних коэффициентов объекта с использованием в контуре регулирования оценок его переменных состояния.
Технический результат заключается в расширении функциональных возможностей системы, а именно обеспечении устойчивости системы управления и точной компенсации нестационарных, Т-периодических изменений внутренних коэффициентов объекта за счет получения и использования в контуре управления оценок его переменных состояния.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.

Изобретение относится к системам автоматического управления и может быть использовано при построении адаптивных систем управления неустойчивыми линейными динамическими объектами периодического действия с относительным порядком передаточной функции, превышающим единицу. Технический результат - обеспечение устойчивости системы управления и точной компенсации нестационарных изменений внутренних коэффициентов объекта регулирования за счет получения и использования оценок его переменных состояния. Адаптивная система управления содержит объект регулирования, блок задания коэффициентов, первый блок суммирования, введены: фильтр-корректор (ФК), n первых умножителей, n вторых умножителей, n третьих умножителей, n четвертых умножителей, n вторых блоков суммирования, n блоков задержки, n интеграторов (n - размерность вектора состояния объекта регулирования) и третий блок суммирования. 2 ил.
Адаптивная система управления с фильтр-корректором (ФК) для априорно неопределенных динамических объектов с периодическими коэффициентами, содержащая объект регулирования, блок задания коэффициентов, первый блок суммирования, отличающаяся тем, что введены: фильтр-корректор (ФК), n первых умножителей, n вторых умножителей, n третьих умножителей, n четвертых умножителей, n вторых блоков суммирования, n блоков задержки, n интеграторов (n - размерность вектора состояния объекта регулирования) и третий блок суммирования, при этом выходы объекта регулирования подключены к соответствующим входам блока задания коэффициентов, выходы блока задания коэффициентов соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к входу четвертого блока суммирования ФК, выход которого соединен с входом n-1 интегратора ФК и является последним n-м выходом ФК, выход j интегратора ФК (j=n-1, n-2, …, 2) связан со входом последующего j-1 интегратора ФК с соответствующим коэффициентом, с k-м (k=2, 3, …, n-1) входом четвертого блока суммирования ФК, а также является j-м выходом ФК, выход первого интегратора ФК с соответствующим коэффициентом связан с последним n-м входом четвертого блока суммирования ФК, а также является первым выходом ФК, каждый из n выходов которого соединен с первым и вторым входами соответствующего i-го (i=1, 2, …, n) первого и третьего умножителей, а также вторым входом каждого i-го второго и четвертого умножителей, выход каждого i-го первого умножителя подключен к первому входу i-го второго блока суммирования, выход которого одновременно соединен с первым входом i-го второго умножителя и входом i-го блока задержки, выход i-го блока задержки подключен к второму входу i-го второго блока суммирования, выход каждого i-го второго умножителя соединен с соответствующим входом третьего блока суммирования; выход каждого i-го третьего умножителя подключен к входу соответствующего i-го интегратора, выход каждого i-го интегратора соединен с первым входом соответствующего i-го четвертого умножителя, выходы каждого i-го четвертого умножителя подключены к соответствующим входам третьего блока суммирования, выход которого подключен к входу объекта регулирования.
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2010 |
|
RU2427870C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2004 |
|
RU2265873C1 |
| КОМБИНИРОВАННАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2010 |
|
RU2441266C1 |
| РАНОРАСШИРИТЕЛЬ ШЕЙНЫЙ | 2010 |
|
RU2457798C1 |
| Электрическое сопротивление для нагревательных приборов и нагревательный элемент для этих приборов | 1922 |
|
SU1997A1 |
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

