Изобретение относится к приборостроению, в частности к оптико-электронным приборам, предназначенным для поиска теплоизлучающих объектов по их излучению с последующим наведением на обнаруженный объект лазерного излучения с целью дальнометрирования и/или создания помех, и может найти применение в авиации.
Известна система направленного инфракрасного (ИК) противодействия AN/AAQ-24(V) NEMESIS компании США Northrop Grumman («Зарубежное военное обозрение», 2005 г., №12, с.37), которая представляет собой комплекс, включающий несколько широкоугольных пеленгаторов излучающих объектов, лазерный излучатель, прицельно-следящую турель и процессор.
Обнаружение потенциальной цели в зависимости от ее местоположения относительно летательного аппарата (ЛА) осуществляется одним из пеленгаторов. Координаты обнаруженной цели передаются через процессор в прицельно-следящую турель с небольшим полем зрения, которая разворачивается в пространстве в соответствии с полученными координатами. После обнаружения и идентификации цели приемной ИК системой турели производится переход к ее сопровождению, после чего включается помеховый лазер.
Недостатком описанной системы является то, что функции обнаружения цели в широком поле, а затем в узком поле осуществляются различными устройствами. При установке этих устройств в различных местах ЛА неизбежны погрешности их взаимного расположения. Из-за деформаций корпуса ЛА в процессе полета, а также из-за параллакса линий визирования отдельных каналов, величина которого изменяется в зависимости от расстояния до цели, эти погрешности еще более увеличиваются. Кроме того, определение координат цели устройством обнаружения также производится с некоторой погрешностью. Таким образом, при наличии перечисленных погрешностей может не осуществиться захват цели узким полем зрения турели.
Вторым недостатком аналога является невозможность противодействия атакующим ракетам при пуске их с малых дистанций и при парном пуске ракет из-за увеличенного времени наведения на цель, свойственного турельным системам с их большой подвижной массой.
Известно устройство направленного ИК противодействия (см. патент США №7304296, МКИ F41G 7/00, НКИ 250/239, опубл. 05.04.2007 г.). Устройство работает в комплексе с несколькими широкоугольными пеленгаторами обнаружения и определения координат потенциальных угроз. Устройство содержит приемный ИК канал, лазерный излучатель и электронный блок обработки информации (процессор). В состав приемного ИК канала входит оптический узел перемещения визирного луча, состоящий из зеркала и призмы. Оба элемента имеют возможность совместного поворота вокруг оптической оси устройства с помощью привода и снабжены датчиком угла поворота. Первое по ходу луча из пространства объектов зеркало имеет возможность поворота относительно призмы с помощью привода и также снабжено датчиком угла поворота. Таким образом, углы поворота зеркала и призмы относительно нулевого положения, соответствующие конкретным показаниям датчиков, однозначно определяют положение оптической оси приемного ИК канала в пространстве.
Кроме того, в устройство направленного противодействия входит помеховый лазерный излучатель, сопряженный с приемным ИК каналом световодом, закрученным вокруг осей поворота зеркала и призмы. Выходной конец световода конструктивно связан с зеркалом, благодаря чему оптическая ось выходящего в направлении цели лазерного пучка всегда параллельна оптической оси приемного ИК канала в пространстве предметов. При этом углы поворота как зеркала, так и всего узла перемещения визирного луча конструктивно ограничены и не превышают 180°.
Недостатком этого устройства является то, что конструктивные особенности размещения световода, направляющего излучение в пространство объектов, не позволяют осуществлять непрерывное сканирование зоны обзора для поиска и обнаружения потенциальной угрозы. Следовательно, устройство имеет ограничения по функциональным возможностям. Это устройство осуществляет функции обнаружения цели только в узком поле зрения, положение которого в пространстве устанавливается по информации, полученной от одного из пеленгаторов обнаружения цели, работающих в комплексе с устройством. Вторым недостатком является то, что разделение каналов обнаружения и наведения помехового лазерного излучения приводит к погрешностям передачи координат цели от канала обнаружения в канал наведения, вследствие чего может не произойти захват цели узким полем зрения приемного ИК канала.
Известна комбинированная оптико-электронная система, рассмотренная в патенте на изобретение РФ №2396573, МПК G01S 3/78, опубл. 10.08.2010 г., которая выбрана в качестве прототипа. Система содержит обтекатель, сканирующее зеркало с датчиками угла поворота и приводами, дихроичное зеркало, отражающее часть падающего на него излучения в лазерный канал и пропускающее часть излучения в теплопеленгационный (ТП) канал. Дихроичное зеркало является элементом, сопрягающим оптические оси лазерного и ТП каналов в пространстве объектов. ТП канал содержит оптическую систему и фотоприемное устройство (ФПУ). Этот канал формирует информацию о наличии цели в поле зрения системы и об углах рассогласования между оптической осью прибора и направлением на цель. Лазерный канал состоит из передающего канала с лазерным излучателем и оптической системой и приемного канала, содержащего оптическую систему и фотоприемное устройство (ФПУ). Передающий и приемный лазерные каналы сопряжены с помощью компонента, например зеркала. Сигналы, воспринимаемые лазерным ФПУ, несут информацию о дальности до цели. Кроме того, в ТП и лазерный каналы введены дефлекторы, снабженные приводами и датчиками угла поворота. Приводы дефлекторов работают синхронно. В комбинированную систему входит также вычислительный блок, координирующий работу всех ее составных частей.
В режиме поиска цели последовательный просмотр зоны обзора полем зрения ТП канала осуществляется за счет движений сканирующего зеркала. Как только ТП канал принимает достаточное количество энергии от цели, указывающее на то, что цель обнаружена, в вычислительном блоке определяется ее угловое положение в зоне обзора на основании информации о координатах изображения цели на матрице ФПУ ТП канала и информации от датчиков угла поворота сканирующего зеркала. В общем случае направление на обнаруженную цель и направление визирной линии, соответствующей центру матрицы ФПУ ТП канала и сопряженной с оптической осью лазерного канала, не совпадают. Поскольку процесс обзора заданной зоны пространства не прерывается, и сканирующее зеркало не останавливается, визирная линия непрерывно движется в направлении сканирования, а также непрерывно движется изображение цели на матрице ФПУ. После того как цель обнаружена, включаются приводы зеркала дефлектора ТП канала (а также работающие синхронно с ними приводы зеркала дефлектора лазерного канала), которые придают дополнительное движение визирной линии, соответствующей центру матрицы ФПУ, в направлении, противоположном направлению сканирования. В момент, когда направление визирной линии совпадет с направлением на обнаруженную цель, изображение цели находится в центре матрицы ФПУ ТП канала. После этого направление движения зеркал дефлекторов должно переключиться с помощью соответствующих приводов на обратное и совпадать с направлением сканирования. В этот момент вычислительный блок выдает команду на запуск импульса лазерного излучения. Отраженное от цели лазерное излучение воспринимается ФПУ лазерного канала через временной интервал, зависящий от дальности до цели. В течение всего периода измерения дальности не должно возникать рассогласования между направлением на обнаруженную цель и направлением визирной линии ТП канала.
В прототипе угловые перемещения зеркал дефлекторов и сканирующего зеркала в двух взаимно перпендикулярных направлениях связаны коэффициентами передачи, равными соответственно угловым увеличениям первых звеньев оптических систем лазерного и ТП каналов (либо коэффициенту М в ТП канале). Эти коэффициенты зависят от выбранных конструктивных параметров оптических систем каналов и являются вполне определенными величинами. Если сканирующее зеркало неподвижно, перемещение изображения цели от приводов зеркала дефлектора ТП канала происходит соответственно вдоль и поперек строк матрицы ФПУ. Направление перемещения изображения цели от приводов сканирующего зеркала при неподвижном зеркале дефлектора зависит от положения центра поля зрения в зоне обзора, поскольку при повороте сканирующего зеркала вокруг вертикальной оси (лежащей в плоскости фиг.1 прототипа) происходит также поворот поля зрения в зоне обзора относительно направления перемещения визирной линии. Кроме того, от положения центра поля зрения в зоне обзора зависит и угловая скорость сканирования. Если сканирующее зеркало повернуто вокруг горизонтальной оси вращения и при этом составляет с вертикальной осью угол, отличающийся от 45° на величину α, угловая скорость перемещения визирной линии (скорость сканирования) при повороте зеркала вокруг вертикальной оси изменяется прямо пропорционально cos2α.
Следовательно, компенсация с помощью зеркала дефлектора углового перемещения визирной линии ТП канала при повороте сканирующего зеркала возможна только в частном случае, когда нормали этих зеркал лежат в одной плоскости, а сканирующее зеркало стоит под углом 45° к вертикальной оси вращения. Во всех остальных случаях при совместном действии приводов сканирующего зеркала и приводов дефлекторов остановка движения визирной линии ТП канала, а также оптически сопряженной с ней оптической оси лазерного канала, не происходит из-за возникающего рассогласования направлений и скоростей движения визирной линии ТП канала от приводов сканирующего зеркала и от приводов дефлекторов. Кроме того, дополнительное рассогласование возникает из-за погрешностей синхронизации работы приводов зеркал дефлекторов, а также из-за погрешностей соответствия коэффициентов передачи ТП и лазерного каналов. Таким образом, существенным недостатком прототипа является то, что дальнометрирование цели в процессе непрерывного движения сканирующего зеркала, т.е. обеспечение требуемой вероятности наведения лазерного излучения на цель, возможно только в одной точке зоны обзора и при условии, что цель неподвижна. Вместе с тем введение дефлекторов усложняет конструкцию, увеличивает энергопотребление и массу, а также уменьшает надежность системы.
Вероятность наведения лазерного излучения на цель (вероятность накрытия цели узким лазерным пучком) зависит как от несовпадения направлений визирной линии ТП канала и оптической оси лазерного канала, так и от величины элементарного поля зрения ТП канала. При уменьшении элементарного поля зрения повышается вероятность наведения лазерного излучения на цель. В прототипе при выбранном ФПУ ТП канала величина элементарного поля зрения однозначно определяется фокусным расстоянием и полем зрения объектива. Эта величина в режиме поиска и обнаружения цели зависит обратно пропорционально от времени обзора заданного пространства. При малом времени обзора, которое требуется при обнаружении объектов, движущихся с большой скоростью, например атакующих ракет, и при условии отсутствия пропусков цели необходимо увеличенное поле зрения ТП канала. При этом вклад составляющей погрешности наведения, обусловленной величиной элементарного поля зрения ТП канала, может быть значительным, и это не позволит обеспечить требуемую вероятность наведения лазерного излучения на цель.
Задачей, на решение которой направлено изобретение, является уменьшение времени обзора заданного пространства, повышение вероятности наведения лазерного излучения на цель и расширение функциональных возможностей системы, что позволяет повысить надежность защиты ЛА от террористических атак.
Указанная задача решается тем, что в комбинированной оптико-электронной системе, содержащей обтекатель, сканирующее зеркало с датчиками углового положения и приводами, дихроичное зеркало и сопряженные со сканирующим зеркалом теплопеленгационный канал, содержащий оптическую систему и фотоприемное устройство, передающий лазерный канал с излучателем и оптической системой и приемный лазерный канал, содержащий оптическую систему и фотоприемное устройство, компонент, оптически сопрягающий передающий и приемный лазерные каналы, а также вычислительный блок, при этом выходы фотоприемных устройств теплопеленгационного и приемного лазерного каналов, выходы датчиков углового положения сканирующего зеркала подключены к соответствующим входам вычислительного блока, соответствующие управляющие выходы которого подключены к приводам сканирующего зеркала, оптическая система теплопеленгационного канала выполнена с возможностью изменения ее фокусного расстояния и поля зрения, снабжена приводом и датчиком положения, выход которого подключен к соответствующему входу вычислительного блока, а соответствующий управляющий выход подключен к входу привода оптической системы теплопеленгационного канала.
А также тем, что в передающем лазерном канале между оптической системой и компонентом, оптически сопрягающим передающий и приемный лазерные каналы, установлено дихроичное зеркало для ввода дополнительного лазерного излучения.
А также тем, что в приемном лазерном канале между оптической системой и фотоприемным устройством установлено дихроичное зеркало для вывода излучения на телевизионное фотоприемное устройство.
На фиг.1 приведена блок-схема системы.
Комбинированная оптико-электронная система содержит обтекатель 1, сканирующее зеркало 2, снабженное датчиками углового положения (ДУЛ) 3, 4 и приводами 5, 6 по двум взаимно перпендикулярным осям, дихроичное зеркало 7, теплопеленгационный (ТП) канал 8, содержащий оптическую систему 9 и фотоприемное устройство (ФПУ) 10. Оптическая система 9 выполнена с возможностью изменения ее фокусного расстояния и поля зрения путем выведения из оптического тракта одного из ее компонентов 11 и введения компонента 12 и снабжена приводом 13 и датчиком положения 14. Оптико-электронная система также содержит передающий лазерный канал 15 с излучателем 16, оптической системой 17 и приемный лазерный канал 18, содержащий оптическую систему 19 и ФПУ 20. Дихроичное зеркало 7 и компонент в виде зеркала 21 служат для сопряжения ТП канала 8, передающего 15, приемного 18 лазерных каналов и сканирующего зеркала 2. В передающем лазерном канале 15 между оптической системой 17 и компонентом 21 может быть установлено дихроичное зеркало 22 для ввода излучения помехового лазера 23, а в приемном лазерном канале 18 между оптической системой 19 и ФПУ 20 может быть установлено дихроичное зеркало 24 для вывода излучения на телевизионное ФПУ 25. Выходы ФПУ 10, ФПУ 20, ДУП 3, 4 и датчика положения 14 подключены к соответствующим входам вычислительного блока 26, соответствующие управляющие выходы которого подключены к приводам 5, 6, 13.
Заявляемое устройство работает следующим образом.
В режиме поиска и обнаружения цели сканирующее зеркало 2 с помощью приводов 5 и 6 непрерывно вращается относительно вертикальной оси и колеблется относительно горизонтальной оси. Таким образом осуществляется просмотр заданной круговой зоны обзора. При этом в оптический тракт ТП канала 8 по команде от бортового устройства управления (на фиг.1 не показано) через вычислительный блок 26 с помощью привода 13 должен быть введен компонент 11, обеспечивающий минимальное фокусное расстояние и максимальное поле зрения оптической системы 9 ТП канала 8. Использование в режиме поиска и обнаружения цели оптической системы 9 с широким полем зрения (≈5-8°) позволяет уменьшить время обзора заданного пространства. Как только в процессе обзора цель попадает в поле зрения оптической системы 9, и ФПУ 10 принимает достаточное количество энергии, вырабатывается сигнал, в соответствии с которым вычислительным блоком 26 принимается решение о том, что цель обнаружена, после чего сканирующее зеркало 2 останавливается в соответствии с показаниями ДУП 3 и 4. При этом цель находится в поле зрения, формируемом оптической системой 9 и матрицей ФПУ 10 ТП канала 8. Затем оптико-электронная система переключается через вычислительный блок 26 в режим сопровождения, при котором положение сканирующего зеркала 2 управляется сигналами рассогласования, полученными с ФПУ 10 ТП канала 8 через вычислительный блок 26. Сигналы рассогласования подаются на приводы 5, 6 сканирующего зеркала 2, перемещающие изображение цели к центру матрицы ФПУ 10. В это время оптическая система 9 по команде от вычислительного блока 26 переключается на максимальное фокусное расстояние и минимальное поле зрения (≈1-2°) путем выведения из оптического тракта компонента 11 и введения компонента 12. При этом величина элементарного поля зрения ТП канала 8 также становится минимальной. Приводы 5, 6 путем воздействия на сканирующее зеркало 2 продолжают перемещение изображения цели в центр поля зрения. При выработке нулевых сигналов рассогласования изображение цели удерживается с помощью приводов 5, 6 в центре матрицы ФПУ 10. Система переходит в следующий режим работы - наведение, при котором оптические оси всех каналов направлены на цель. В этот момент вычислительный блок 26 передает в бортовое устройство управления информацию о том, что система готова к передаче лазерного излучения. От бортового устройства управления подается команда на включение излучателя 16 передающего лазерного канала 15 для определения дальности до обнаруженной цели. Излучение от лазерного излучателя 16 проходит через оптическую систему 17, дихроичное зеркало 22, отражается от компонента 21 и сканирующего зеркала 2, проходит через обтекатель 1 и направляется на обнаруженную цель. Отраженное от цели лазерное излучение возвращается через обтекатель 1 на сканирующее зеркало 2, после отражения от него направляется на дихроичное зеркало 7, частично экранируясь компонентом 21, а затем поступает в приемный лазерный канал 18 через оптическую систему 19, дихроичное зеркало 24 на ФПУ 20. Сигналы с ФПУ 20 поступают в вычислительный блок 26, в котором вычисляется дальность до цели. Информация о дальности затем поступает в бортовое устройство управления. На основании информации, полученной с ФПУ 10 ТП канала 8, и информации о дальности до цели, полученной с ФПУ 20, в бортовом устройстве управления может быть принято решение о запуске помехового лазера 23 путем подачи команды на его управляющий вход. Излучение от помехового лазера 23 с помощью дихроичного зеркала 22 передающего лазерного канала 15 может быть введено в оптический тракт системы. Это излучение, отразившись от компонента 21, сканирующего зеркала 2, проходит через обтекатель 1 и направляется на обнаруженную цель. При воздействии этого излучения на чувствительные элементы ФПУ атакующей ракеты происходит нарушение ее функционирования. Часть излучения от пространства объектов, прошедшего через оптическую систему 19 и отраженного от дихроичного зеркала 24, может быть выведена в телевизионное ФПУ 25, а затем использоваться для визуализации пространства объектов, повышая тем самым информативность оптико-электронной системы.
Таким образом, использование предложенной комбинированной оптико-электронной системы позволяет повысить надежность защиты ЛА от террористических атак и достичь технического результата, заключающегося в следующем:
- в уменьшении времени обзора заданного пространства в режиме поиска и обнаружения цели, в повышении вероятности наведения лазерного излучения на обнаруженную цель за счет оперативного изменения фокусного расстояния оптической системы ТП канала и ее поля зрения, а также за счет управления приводами сканирующего зеркала по сигналам, полученным с ФПУ ТП канала;
- в расширении функциональных возможностей системы за счет введения дихроичных зеркал в передающий и приемный лазерные каналы, обеспечивающих возможность ввода излучения помехового лазера для подавления угрожающих целей и вывода видимого излучения в телевизионное ФПУ для повышения информативности системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| МНОГОКАНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2617459C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2008 |
|
RU2372628C1 |
| СПОСОБ СЕЛЕКЦИИ МОРСКОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2719393C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| ТЕЛЕВИЗИОННО-ЛАЗЕРНЫЙ ВИЗИР-ДАЛЬНОМЕР | 2012 |
|
RU2515766C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2016 |
|
RU2639321C1 |
| ПАНОРАМНЫЙ ПРИЦЕЛ СО ВСТРОЕННЫМ ЛАЗЕРНЫМ ДАЛЬНОМЕРОМ | 2018 |
|
RU2706519C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2007 |
|
RU2335728C1 |
| СПОСОБ И УСТРОЙСТВО АЗИМУТАЛЬНО-УГЛОМЕСТНОЙ ИНДИКАЦИИ В ОПТИКО-ЛОКАЦИОННЫХ СИСТЕМАХ | 2015 |
|
RU2628301C2 |
Изобретение относится к оптико-электронным приборам для поиска теплоизлучающих объектов. Система содержит обтекатель, сканирующее зеркало, теплопеленгационный (ТП) канал с оптической системой и фотоприемным устройством, лазерный канал дальнометрирования с излучателем, приемной оптической системой и фотоприемным устройством, лазерный канал помехового излучения и телевизионный канал для получения изображения пространства объектов. В режиме обзора осуществляется непрерывный просмотр заданной зоны пространства с помощью сканирующего зеркала. В оптическую систему ТП канала вводится компонент, обеспечивающий ее широкое поле зрения, что позволяет уменьшить время просмотра зоны обзора. После обнаружения цели система переходит в режим слежения, в процессе которого изображение цели совмещается с оптической осью ТП канала. При переходе из режима обзора в режим слежения в оптическую систему ТП канала вводится компонент, сужающий ее поле зрения, в результате чего уменьшается элементарное поле зрения системы и повышается точность слежения. Технический результат - уменьшение времени обзора пространства, повышение вероятности наведения лазерного излучения на цель, расширение функциональных возможностей. 2 з.п. ф-лы, 1 ил.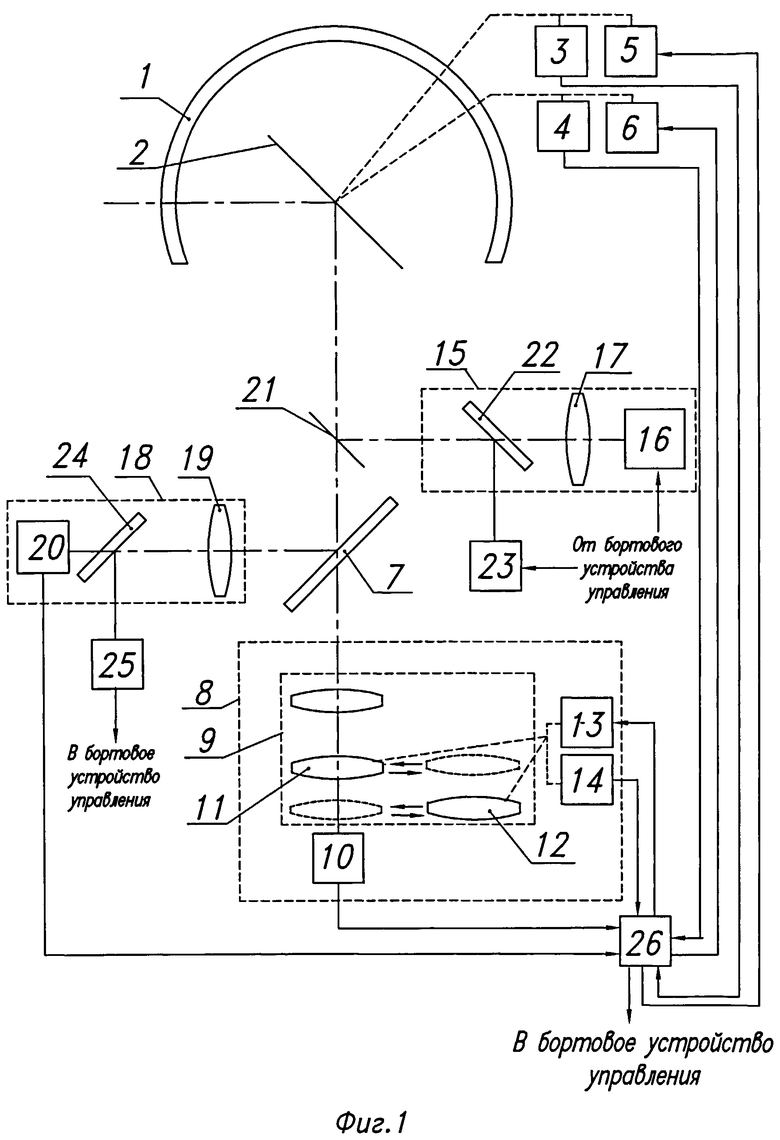
1. Комбинированная оптико-электронная система, содержащая обтекатель, сканирующее зеркало с датчиками углового положения и приводами, дихроичное зеркало и сопряженные со сканирующим зеркалом теплопеленгационный канал, содержащий оптическую систему и фотоприемное устройство, передающий лазерный канал с излучателем и оптической системой и приемный лазерный канал, содержащий оптическую систему и фотоприемное устройство, компонент, оптически сопрягающий передающий и приемный лазерные каналы, а также вычислительный блок, при этом выходы фотоприемных устройств теплопеленгационного и приемного лазерного каналов, выходы датчиков углового положения сканирующего зеркала подключены к соответствующим входам вычислительного блока, соответствующие управляющие выходы которого подключены к приводам сканирующего зеркала, отличающаяся тем, что оптическая система теплопеленгационного канала выполнена с возможностью изменения ее фокусного расстояния и поля зрения, снабжена приводом и датчиком положения, выход которого подключен к соответствующему входу вычислительного блока, а соответствующий управляющий выход подключен к входу привода оптической системы теплопеленгационного канала.
2. Система по п.1, отличающаяся тем, что в передающем лазерном канале между оптической системой и компонентом, оптически сопрягающим передающий и приемный лазерные каналы, установлено дихроичное зеркало для ввода дополнительного лазерного излучения.
3. Система по п.1, отличающаяся тем, что в приемном лазерном канале между оптической системой и фотоприемным устройством установлено дихроичное зеркало для вывода излучения на телевизионное фотоприемное устройство.
| ТЕПЛОПЕЛЕНГАТОР | 2008 |
|
RU2396574C2 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| US 4561775 A, 31.12.1985 | |||
| JPH 07208979 A, 11.08.1995 | |||

