Изобретение относится к приборостроению, в частности к оптико-электронным приборам, предназначенным для поиска теплоизлучающих объектов и их сопровождения с последующим наведением на обнаруженный объект лазерного излучения с целью дальнометрирования и/или создания помех инфракрасным головкам самонаведения (ИГС) атакующих ракет для защиты летательных аппаратов (ЛА).
Известна система поиска и сопровождения цели с приемником инфракрасного (ИК) излучения и лазерным дальномером (см. патент США №3644043, МКИ G01С 3/08, НКИ 356-5, опубл. 22.02.1972), предназначенная для управления артиллерийским огнем. Эта система содержит подвижное зеркало с датчиками углового положения (ДУП) и приводами по взаимно перпендикулярным осям, пеленгационный канал, включающий объектив из двух сферических зеркал, плоское сканирующее зеркало и приемник ИК излучения с чувствительными элементами, расположенными в виде линейки, а также передающий и приемный лазерные каналы, оптически сопряженные с помощью призменного устройства. Между зеркалами объектива установлен спектроделитель, пропускающий пассивное излучение от цели в ИК приемник и отражающий лазерное излучение (ЛИ) в лазерный приемник. Слежение за целью осуществляется с помощью сканирующего зеркала, совершающего колебательное движение.
К недостаткам описанной системы следует отнести наличие двух приемников с блоками обработки информации, что увеличивает габариты системы и уменьшает ее надежность. Кроме того, при использовании этой системы на подвижном объекте, например летательном аппарате, из-за дополнительных погрешностей наведения, возникающих при эволюциях ЛА с высокими угловыми скоростями, точность наведения узконаправленного лазерного пучка оказывается недостаточной.
Известна оптико-электронная система поиска и сопровождения цели (см. патент РФ №2155323, МПК7 G01С 3/08, G01В 11/26, F41G 3/06, 7/26, опубл. 27.08.2000 г.), которая выбрана в качестве прототипа. Система содержит подвижное головное зеркало с датчиками углового положения и приводами по взаимно перпендикулярным осям, пеленгационный канал, включающий зеркально-линзовый объектив, сканирующее зеркало с приводом и фотоприемное устройство (ФПУ). В состав системы входит лазерный дальномер, состоящий из передающего и приемного лазерных каналов и определяющий дальность до цели. Оптическое сопряжение пеленгационного и лазерного каналов осуществляется с помощью спектроделителя, установленного между головным зеркалом и объективом пеленгационного канала. Спектроделитель отражает излучение от лазерного передатчика на головное зеркало, направляющее это излучение на цель. Отраженное от цели ЛИ и собственное ИК излучение цели, т.е. смешанное (лазерное и ИК) излучение попадает на головное зеркало, а затем на спектроделитель, который пропускает пассивное излучение от цели в пеленгационный канал и отражает ЛИ в объектив приемного лазерного канала, в фокальной плоскости которого установлен лазерный приемник. Выделенное ИК излучение проходит через объектив пеленгационного канала на сканирующее зеркало, совершающее колебательное движение, и после отражения от последнего попадает на чувствительную площадку ИК приемника. Выход ФПУ подключен к входу вычислительно-управляющего блока, вырабатывающего управляющие сигналы на приводы головного зеркала и лазерный передатчик.
Одним из недостатков прототипа является наличие двух объективов и двух приемников излучения, что усложняет конструкцию, увеличивает ее габариты и уменьшает надежность. Воздействие вибрационных и ударных нагрузок, неизбежных на ЛА, может привести к рассогласованию двух приемных каналов и к потере отраженного лазерного сигнала от цели. Другим недостатком прототипа является использование сканирующего зеркала для слежения за целью, что также приводит к снижению надежности устройства и усложнению его конструкции. Кроме того, при слежении за целью с помощью сканирующего зеркала возникает дополнительная погрешность совмещения оси пучка ЛИ с направлением на цель, зависящая от скорости перемещения цели в пространстве и скорости угловых эволюции ЛА.
Описанные выше оптико-электронные системы поиска и сопровождения цели имеют ограничение по функциональным возможностям:
невозможно их применение для точного определения координат ИГС атакующих ракет с целью их дальнейшего подавления. Так, информация об углах рассогласования между оптической осью прибора и направлением на цель формируется в пеленгационном канале по максимальному сигналу с чувствительных элементов ФПУ, т.е. наведение лазерного излучения осуществляется на энергетический центр ИК излучения цели. Если целью является атакующая ракета, то энергетическим центром ИК излучения является ее факел либо по окончании работы двигателей ее нагретый корпус. По мере сближения ракеты с ЛА увеличивается угловое расстояние между энергетическим центром излучения и ИГС ракеты. Если это расстояние превышает расходимость лазерного излучения, то в этом случае возможно измерение дальности до ракеты, но невозможно точное наведение ЛИ на ИГС для ее подавления.
Задачей, на решение которой направлено изобретение, является повышение точности наведения лазерного излучения на цель путем определения в ИК пеленгационном канале как угла рассогласования между оптической осью прибора и инфракрасным сигналом от цели, так и угла рассогласования между оптической осью прибора и отраженным от ИГС лазерным сигналом, что позволяет обеспечить продолжительное воздействие лазерного излучения именно на ИГС атакующей ракеты для ее дальнейшего подавления при упрощении конструкции и уменьшении габаритных размеров системы. Повышение точности наведения достигается также путем устранения ошибок, возникающих при эволюциях с высокими угловыми скоростями носителя, например, летательного аппарата (ЛА), на котором установлена предлагаемая система.
Указанная задача решается тем, что в оптико-электронной системе поиска и сопровождения цели, содержащей подвижное головное зеркало, установленное на основании и снабженное двумя приводами по двум взаимно перпендикулярным осям и датчиками углового положения, инфракрасный пеленгационный канал, содержащий объектив и фотоприемное устройство, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, входной элемент для ввода лазерного излучения от передающего лазерного канала, при этом выход фотоприемного устройства и выходы датчиков углового положения подключены к соответствующим входам вычислительно-управляющего блока, соответствующие управляющие выходы которого подключены к приводам головного зеркала и управляющему входу передающего лазерного канала, между головным зеркалом и объективом под углом к оптической оси установлено фиксированное плоское зеркало с осевым отверстием, расположенным по ходу лазерного излучения от передающего лазерного канала, объектив выполнен из двух компонентов, между которыми в фокальной плоскости первого по ходу излучения компонента установлена диафрагма, при этом инфракрасный пеленгационный канал является одновременно приемным лазерным каналом системы.
А также тем, что на основании подвижного головного зеркала установлены ортогонально датчики угловой скорости, выходы которых подключены к соответствующим входам вычислительно-управляющего блока.
Вычислительно-управляющий блок выполнен из последовательно соединенных селектора цели, вход которого подключен к выходу фотоприемного устройства, и анализатора отраженного лазерного излучения, выход которого и второй выход селектора цели подключены к входам управляющего устройства, связанного через контроллер с входами приводов и выходами датчиков углового положения головного зеркала, а также с выходами датчиков угловой скорости и имеющего выход, подключенный к управляющему входу передающего лазерного канала.
На чертеже приведена блок-схема системы.
Оптико-электронная система поиска и сопровождения цели содержит подвижное головное зеркало 1, установленное на основании 2, жестко связанном с носителем (например, корпусом летательного аппарата - на чертеже не показан), снабженное датчиками углового положения (ДУП) 3, 4 и приводами 5, 6 по двум взаимно перпендикулярным осям, инфракрасный (ИК) пеленгационный канал 7, содержащий объектив 8 и фотоприемное устройство (ФПУ) 9, формирующий сигнал рассогласования между оптической осью системы и направлением на цель, входной элемент 10 для ввода лазерного излучения (ЛИ) от передающего лазерного канала (ЛК) 11, при этом выход фотоприемного устройства 9 и выходы ДУП 3, 4 подключены к соответствующим входам вычислительно-управляющего блока 12, соответствующие управляющие выходы которого подключены к приводам 5, 6 головного зеркала 1 и управляющему входу передающего ЛК 11. Между головным зеркалом 1 и объективом 8 под углом к оптической оси установлено фиксированное плоское зеркало 13 с осевым отверстием, расположенным по ходу ЛИ от передающего ЛК 11, объектив 8 выполнен из двух компонентов 14 и 15, между которыми в фокальной плоскости первого по ходу излучения компонента 14 установлена диафрагма 16, при этом ИК пеленгационный канал 7 является одновременно приемным ЛК системы и сопряжен с помощью фиксированного плоского зеркала 13 с передающим ЛК 11. В данной системе в качестве ФПУ 9 ИК пеленгационного канала 7 выбрано матричное ФПУ, работающее в области спектра 3,7-4,8 мкм. При этом длина волны ЛИ передающего ЛК 11 должна находиться в том же спектральном диапазоне. Вычислительно-управляющий блок 12 вырабатывает управляющие сигналы на приводы 5, 6 и информационные сигналы для излучателя передающего ЛК 11 в соответствии с режимами работы системы.
На основании 2 подвижного головного зеркала 1 могут быть установлены ортогонально три датчика угловой скорости 17, 18, 19, выходы которых подключены к соответствующим входам вычислительно-управляющего блока 12 для ввода в вычислительно-управляющий блок 12 информации о скорости перемещения ЛА при эволюциях, которая затем учитывается при выдаче управляющих сигналов на приводы сканирования 5, 6 головного зеркала 1.
Вычислительно-управляющий блок 12 выполнен из последовательно соединенных селектора цели 20, вход которого подключен к выходу ФПУ 9, и анализатора отраженного лазерного излучения 21, выход которого и второй выход селектора цели 20 подключены к входам управляющего устройства 22, подключенного через контроллер 23 к входам приводов 5, 6 головного зеркала 1, к выходам датчиков углового положения 3, 4 и датчиков угловой скорости 17, 18, 19 и имеющего выход для подключения к управляющему входу передающего лазерного канала 11. Один из входов управляющего устройства 22 подключен к внешней системе целеуказания, например РЛС или широкоугольному пеленгатору (на чертеже не показаны). Селектор цели 20 и анализатор отраженного лазерного излучения 21 могут быть выполнены на базе сигнальных процессоров TMS320C6202 фирмы Texas Instrument, a управляющее устройство 22 может быть выполнено на базе микропроцессорного модуля формата РС/104 + СММ 17686 GX300-128 фирмы RTD.
Заявляемое устройство работает следующим образом. Подвижное головное зеркало 1 поворачивается с помощью приводов 5, 6 в соответствии с информацией от внешней системы целеуказания, например РЛС или широкоугольного пеленгатора, с учетом поправок, произведенных в вычислительно-управляющем блоке 12 на основании показаний датчиков угловых скоростей 17, 18, 19. После отработки целеуказания предполагаемая цель находится в кадре, формируемом объективом 8 и матрицей ФПУ 9. Начинается режим обнаружения цели. Как только по сигналам с ФПУ 9 ИК пеленгационного канала 7 селектором цели 20 принимается решение, указывающее на то, что цель обнаружена, система переключается через управляющее устройство 22 в режим сопровождения, при котором положение подвижного головного зеркала 1 управляется сигналами рассогласования, полученными с ИК пеленгационного канала 7 через вычислительно-управляющий блок 12. Сигнал рассогласования между оптической осью системы и направлением на цель по двум координатам - азимуту и углу места через вычислительно-управляющий блок 12 подается на приводы 5 и 6 головного зеркала 1, перемещая изображение цели к центру матрицы ФПУ 9. В это же время селектор цели 20 анализирует признаки цели и передает их в управляющее устройство 22. Если признаки цели соответствуют признакам «ракета», то изображение цели приводится в центр матрицы ФПУ 9 и удерживается в этом положении. При выработке нулевого сигнала рассогласования система переходит в следующий режим работы - наведение. В этот момент управляющее устройство 22 передает сообщение на включение лазерного излучения передающего лазерного канала 11. Лазерное излучение через входной элемент 10 и осевое отверстие фиксированного плоского зеркала 13, отразившись от головного зеркала 1, направляется на обнаруженную цель. При этом лазерное излучение, падающее на головное зеркало 1, частично рассеивается в обратном направлении. Диафрагма 16 препятствует попаданию рассеянного лазерного излучения на матрицу ФПУ 9, предохраняя ее от излишней засветки, ухудшающей чувствительность ФПУ. Отраженный от цели сигнал возвращается на головное зеркало 1, затем отражается от фиксированного плоского зеркала 13, проходит через объектив 8 и попадает на матрицу ФПУ 9. Анализатор отраженного лазерного излучения 21 определяет время прихода и уровень отраженного сигнала, на основании которых вычисляется дальность до цели, и по уровню отраженного сигнала принимает решение - «диффузное отражение» или «обратный блеск». Если уровень сигнала соответствует явлению «обратного блеска», что характерно для ИГС ракеты, через управляющее устройство 22 передается сообщение в передающий лазерный канал 11 на продолжение процесса лазерного излучения.
Поскольку атакующая ракета приближается к ЛА, начиная с некоторой дистанции, зависящей как от параметров системы поиска и сопровождения цели, так и от размеров ракеты и ракурса, ее изображение на матрице ФПУ 9 становится протяженным, т.е. появляется рассогласование между сигналом в пеленгационном канале от факела ракеты и сигналом «обратного блеска» от ИГС. В этом случае управляющее устройство 22 выдает соответствующие команды на приводы 5, 6 головного зеркала, удерживающие сигнал «обратного блеска» в центре матрицы ФПУ 9. Таким образом, дальнейшее наведение ЛИ осуществляется точно в направлении ИГС атакующей ракеты. При этом при длительном воздействии ЛИ на чувствительные элементы ФПУ ИГС атакующей ракеты происходит нарушение функционирования ИГС. Процесс лазерного излучения продолжается до уменьшения или исчезновения сигнала «обратного блеска». Это означает, что ИГС атакующей ракеты подавлена.
Таким образом, использование предлагаемой оптико-электронной системы позволяет достичь технического результата, заключающегося в повышении точности наведения лазерного излучения на ИГС атакующей ракеты, расширении функциональных возможностей системы, а именно обеспечения не только обнаружения и дальнометрирования теплоизлучающей цели, но и последующего подавления ИГС атакующей ракеты при упрощении конструкции и уменьшении габаритных размеров системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННАЯ ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА | 2014 |
|
RU2541494C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ ПРИЦЕЛЬНАЯ СИСТЕМА | 2008 |
|
RU2396573C2 |
| Оптико-электронная система поиска и сопровождения цели | 2017 |
|
RU2664788C1 |
| СПОСОБ И СИСТЕМА ЗАЩИТЫ ВОЗДУШНЫХ СУДОВ ОТ РАКЕТ ПЕРЕНОСНЫХ ЗЕНИТНЫХ РАКЕТНЫХ КОМПЛЕКСОВ | 2012 |
|
RU2511513C2 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| ОПТИЧЕСКАЯ ПОЛЯРИЗАЦИОННАЯ ГОЛОВКА САМОНАВЕДЕНИЯ С ОДНОЭЛЕМЕНТНЫМ ИНФРАКРАСНЫМ ПРИЕМНИКОМ ИЗЛУЧЕНИЯ | 2023 |
|
RU2825219C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| АКТИВНАЯ ЛАЗЕРНАЯ ГОЛОВКА САМОНАВЕДЕНИЯ | 2013 |
|
RU2573709C2 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| СПОСОБ СЕЛЕКЦИИ МОРСКОЙ ЦЕЛИ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМОЙ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2719393C1 |
Изобретение относится к области защиты летательных аппаратов (ЛА) для создания помех инфракрасным головкам самонаведения (ИГС) атакующих ракет. Технический результат - повышение точности наведения. Система содержит головное зеркало, подвижное по двум взаимно перпендикулярным осям и снабженное датчиками углового положения, инфракрасный (ИК) пеленгационный канал, содержащий объектив и фотоприемное устройство (ФПУ). Между головным зеркалом и объективом под углом к оптической оси установлено фиксированное плоское зеркало с осевым отверстием, расположенным по ходу лазерного излучения от передающего лазерного канала. Выход ФПУ и выходы датчиков углового положения головного зеркала подключены к вычислительно-управляющему блоку, управляющие выходы которого подключены к приводам головного зеркала и управляющему входу передающего лазерного канала. Объектив выполнен из двух компонентов, между которыми в фокальной плоскости первого по ходу излучения компонента установлена диафрагма, которая препятствует попаданию рассеянного лазерного излучения на матрицу ФПУ. ИК пеленгационный канал является одновременно приемным лазерным каналом системы. За счет определения в ИК пеленгационном канале угла рассогласования между оптической осью системы и отраженным от цели лазерным сигналом достигается повышение точности наведения лазерного излучения на ИГС атакующей ракеты. Датчики угловой скорости, установленные на основании головного зеркала, обеспечивают ввод в вычислительно-управляющий блок информации о скорости перемещения ЛА при эволюциях, которая учитывается при выдаче управляющих сигналов на приводы головного зеркала. 2 з.п. ф-лы, 1 ил.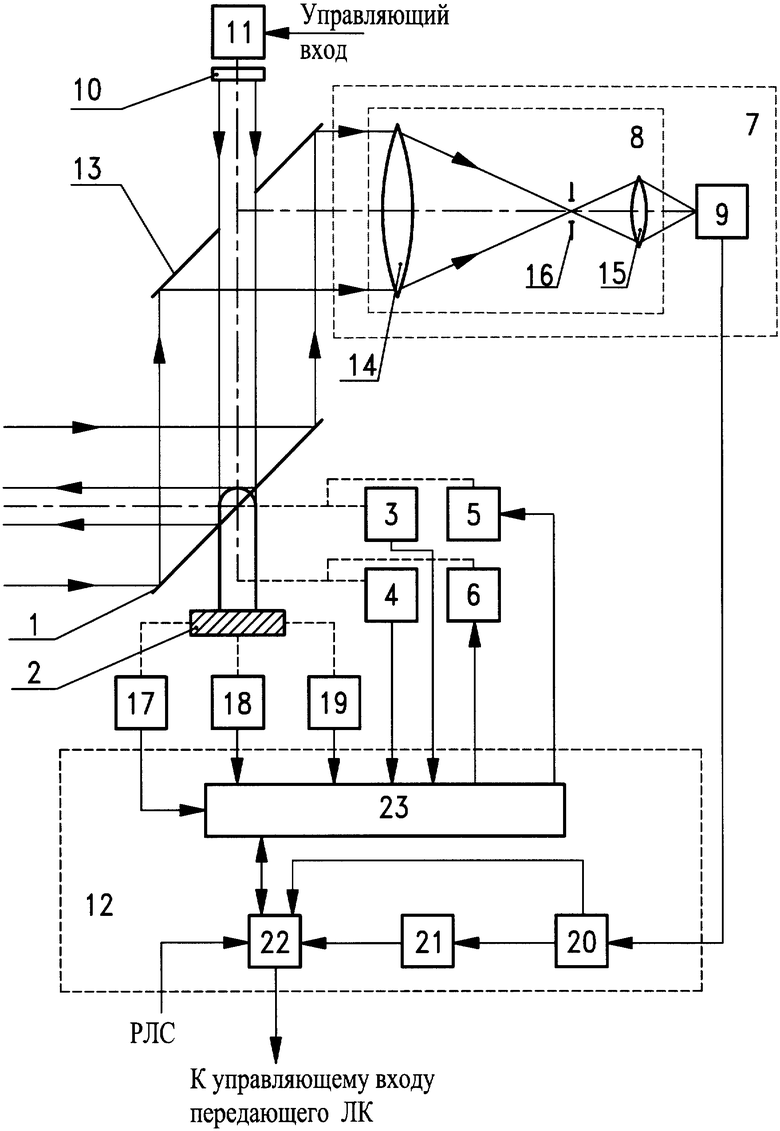
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2000 |
|
RU2155323C1 |
| DE 3104318 А1, 26.02.1982 | |||
| DE 3048809 С1, 30.09.1982 | |||
| US 4902128 А, 20.02.1990 | |||
| US 4386848 А, 07.06.1983. | |||

