Изобретение относится к машиностроению и может быть использовано в качестве устройства, имитирующего случайные движения, например, в авиа- и судомоделировании, для привода в движение полотеров, утюгов, отпаривателей, для формирования случайно направленных выстрелов мячами и хоккейными шайбами при спортивных тренировках, в качестве вибрационных установок для перемешивания жидкого бетона в строительстве и т.п.
Из уровня техники известен инерциоид (инерционный движитель) [http://ru.wikipedia.org/wiki/Инерциоид] - это механизм, аппарат, устройство, способные приходить в поступательное движение в пространстве или по поверхности без взаимодействия с окружающей средой, а лишь за счет перемещения рабочего тела, находящегося внутри.
Возможность такого движителя отрицается классической механикой. Требуемые (заявляемые) инерциоидом эффекты должны быть намного порядков слабее (менее выраженные) для их обнаружения и использования в устройствах наподобие предлагаемых авторами.
Технический результат, требуемый от инерциоида, заключается в осуществлении поступательного движения инерциоида во время взаимодействия его подвижных и неподвижных элементов без передачи усилия (передачи крутящих моментов и т.п.) к каким-либо движителям (ведущим колесам, воздушным и гребным винтам и т.п.). По мнению авторов инерциоид может двигаться при изменении скорости центра масс за счет нескомпенсированной силы инерции, не взаимодействуя с окружающей средой, являясь так называемым «безопорным двигателем», что отрицается классической механикой.
Из механических инерциоидов наиболее известен инерциоид Толчина В.Н. [http://www.youtube.com/watch?v=pcEdpb-rlX4&noredirect=1], в котором вращающиеся на штангах грузы меняют свои угловые скорости при взаимодействии с телом инерциоида. Штанги и грузы синхронно вращаются на осях мотор-тормоза в параллельных плоскостях в разных направлениях. Мотор-тормоз в определенных углах поворотов грузов относительно тележки изменяет их угловую скорость, поочередно придавая им импульсы сил на угловое ускорение и торможение, создавая некомпенсированную силу инерции 
Данный инерциоид выбран в качестве ближайшего аналога. К недостаткам инерциоида Толчина В.Н. можно отнести его небольшую удельную мощность и сильную вибрацию инерциоида, возникающую при взаимодействии грузов с телом инерциоида.
Технический результат, достигаемый заявленным изобретением, заключается в создании устройства большой удельной мощности, которое во время своей работы не генерирует сильной вибрации и может быть использовано для формирования случайных смещений грузов для разных потребностей техники.
Указанный технический результат достигается за счет того, что способ случайного смещения грузов, характеризующийся вращением роторов с грузами, отличается тем, что на станине или раме закрепляют статор или группу статоров, причем корпус каждого статора, как и его внутреннее пространство, делят на сектора, в которых размещают индукторы, с помощью которых производят генерирование электрического тока или магнитных полей, текущих во внутреннем пространстве своего сектора, так же во внутреннем пространстве каждого статора располагают вал ротора не менее чем с одним колесом, причем на каждом колесе закрепляют оси с сегментами, между сегментами в плоскости вращения ротора формируют равные зазоры, в которых устанавливают упругие элементы, причем сегменты выполняют с возможностью качания на своих осях и имеющими эксцентриситет массы, точки эксцентриситета массы которых в плоскости вращения ротора лежат за окружностью, перпендикулярно которой лежат их оси, содержащие обмотки с сердечниками, которыми генерируют магнитные поля или электрический ток, и которые подключают к электрическим цепям устройства через коллекторно-щеточный механизм или постоянные магниты.
Индукторы отдельных секторов статоров независимо друг от друга выполняют как электрические машины переменного электрического тока.
Индукторы отдельных секторов статоров независимо друг от друга выполняют как электрические машины постоянного электрического тока.
Индукторы отдельных секторов статоров независимо друг от друга выполняют с постоянными магнитами.
Индукторы в исполнении электрической машины постоянного тока формируют с наконечниками главных полюсов, главными полюсами, катушками возбуждения и магнитопроводящей частью статора, которые помещают в секторе статора.
Индукторы в исполнении электрической машины переменного тока выполняют имеющими катушки секций обмоток с парами полюсов, равномерно распределенных в секторе корпуса статора и части корпуса статора, которую занимает индуктор.
Отдельные индукторы статора или группы статоров, имеющие свои отдельные электрические и магнитные цепи, объединяют в одном секторе статора или группы статоров и имеют как общие, так и раздельные электрические и магнитные цепи с другими индукторами своего или другого статора.
Валы выполняют с возможностью вращения на своих подшипниках или жестко закрепляют в своих опорах, как оси на станине или подшипниковых щитах корпусов статоров.
На каждом валу крепится колесо ротора, имеющее осевую симметрию относительно оси вала.
На колесах роторов, на своих осях с осевой симметрией относительно оси вала, закрепляют не менее двух сегментов, которые идентичны друг другу.
Между сегментами одного ротора в плоскости их вращения выполняют равные зазоры, имеющие осевую симметрию относительно оси вала, где к пространству зазоров также относится пространство пазов на сегментах для упругих элементов.
Сегменты вместе с зазорами выполняют таким образом, что они занимают весь сектор окружности своего ротора, лежащей в плоскости его вращения, который равен 360°.
В каждом сегменте закрепляют обмотку и сердечник из листов электротехнической стали или постоянный магнит из магнитотвердого материала.
В электрической машине переменного тока внутри сегментов закрепляют короткозамкнутые металлические пластины-стержни.
При коммутации электрических цепей обмоток сегментов одного ротора, противоположных относительно оси ротора в пары, обмотки сегментов, работающие в режиме генератора электрического тока подпитывают электрическим током обмотки сегментов, работающие в режиме электродвигателя.
Коллектор устройства, как машины постоянного электрического тока, выполняют как два полых цилиндра, состоящих из клинообразных пластин, с количеством пластин в каждом цилиндре, соответствующем количеству сегментов ротора, причем цилиндры коллектора закреплены на валу или колесе ротора.
Пары щеток или блока щеток коллекторно-щеточного механизма выполняют имеющими ответную форму цилиндрам коллектора и прислоняют к пластинам цилиндров коллектора только в своем секторе таким образом, что включаются электрические цепи независимых обмоток сегментов роторов, находящихся только в заданных секторах статора, которые при взаимодействии с индукторами независимо друг от друга могут работать в режиме и электродвигателя, и генератора электрического тока.
Коллектор как машины переменного тока выполняют как два полых сплошных цилиндра, цилиндры коллектора закреплены на валу или колесе ротора.
При коммутировании обмоток сегментов параллельным соединением паре щеток или блока щеток коллекторно-щеточного механизма подключают к электрическому току электрические цепи всех обмоток сегментов.
Осуществление изобретения
Способ может быть реализован с использованием следующего устройства.
Для начала введем понятие мощности. Мощность - это величина, определяющая работу совершаемой силой за единицу времени, она равна произведению касательной составляющей силы на скорость (см.: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа. Глава XVII, § 87, стр.210, третий, четвертый абзацы). Работу, произведенную машиной, можно измерять произведением ее мощности на время работы. Единицей измерения мощности в СИ является ватт (1 Вт = 1 Дж/с). В данном случае удельная мощность устройства - это соотношение его мощности к массе самого устройства. По принципу действия представляемые далее варианты устройства являются электромеханическими устройствами, обеспечивающими случайное сдвижение груза с места. По принципу взаимодействия элементов различные вариации устройства представляют собой электрическую машину и состоят из трех основных элементов (Фиг.1): станины или рамы 1, группы статоров 2 и группы роторов 3.
Станина 1 или рама является основой для крепления к ней элементов устройства и служит для соединения устройства или группы устройств с авиа-судомоделью или механизмом, на котором они используются. Станина 1 также может использоваться для управления направлением движения транспортного средства авиасудомодели или механизма путем поворота на ней устройства в необходимую сторону. Геометрическая форма, материал для изготовления и технология изготовления станины 1 могут быть любыми, отвечающими требованиям по прочности конструкции. В качестве станины 1 допустимо использовать раму, корпус авиасудомодели или механизма, на котором установлено устройство. Крепление элементов устройства осуществляется соединительными элементами. Как известно, к соединительным элементам относятся: болты, шпильки, винты, гайки, заклепки, сварка.
Назначение статоров 2 состоит в создании магнитных полей, которые будут воздействовать на роторы 3. В отличие от мотор-тормоза устройства Толчина статоры 2 представляют собой статоры электрической машины и при работе устройства воздействуют на роторы 3 постоянно, одновременно придавая их элементам импульсы сил на угловое ускорение и торможение.
Назначение роторов 3 - взаимодействие со статорами 2 своими магнитными полями для придания устройству импульсного момента для сдвижения в некоем направленном секторе. В отличие от грузов на штангах устройства Толчина элементы роторов 3 являются частями электрической машины и способны менять свою геометрическую форму, в результате их отдельные элементы способны двигаться с разной угловой скоростью.
На станине 1 закреплены статоры 2, которые в данном варианте имеют геометрическую форму пустотелых цилиндров, они идентичны друг другу, их оси расположены в одной плоскости.
Как известно (см.: автор Бутырин П.А и др. Электротехника. 2007 г., издательский центр Академия, Глава 7, стр.112-113), в электрических машинах постоянного и переменного тока можно выделить неподвижную часть, называемую статором, и подвижную часть, называемую ротором. Статор и ротор изготовляют из специальной магнитной стали, причем ротор для всех машин набирается из пластин, а статор изготовляется в виде пакета пластин только для машин переменного тока. На статор и ротор наматываются электрические обмотки, по которым протекает электрический ток. Вал ротора закреплен на подшипниках для уменьшения потерь при вращении.
Принцип действия электрических машин основан на появлении электродвижущей силы в рамке, представляющей собой замкнутый контур проводников, находящихся в магнитном поле (см. автор Бутырин П.А и др., Электротехника. 2007 г. издательский центр Академия, Глава 3, стр.36-37). Кроме этого принципа, в данных вариантах устройства используется свойство магнитов притягиваться разноименными полюсами и отталкиваться одноименными (см. автор Жданов Л.С. Курс физики. 1968 г., издательство Наука, стр.227, § 22.3, последнее предложение).
Внутри каждого статора 2 закреплены два независимых индуктора 4. Учитывая, что статоры 2 идентичны и симметричны, индукторы располагают аналогичным образом симметрично. Каждый индуктор 4 по устройству и принципу действия аналогичен индуктору электрической машины, с внутренней стороны крепятся главные полюсы 5, на каждый главный полюс 5 помещаются соединенные последовательно обмотки возбуждения (катушки) 6, для более равномерного распределения магнитного поля в воздушном зазоре индуктора 4 главные полюсы 5 имеют наконечники 7.
Плоскости наконечников 7, лежащие к внутреннему пространству своего статора 2, образуют части окружности, минимальный диаметр (минимальный диаметр внутреннего пространства статора 2 в других вариантах) которой подбирается с учетом зазора, предотвращающего касание их элементами роторов 3.
Изготовление и сборка статоров 4 устройства производится по технологии производства электрических машин. Корпус каждого статора 2 может быть изготовлен из электротехнической стали. Главные полюсы 5 и наконечники 7 могут быть изготовлены из листовой электротехнической стали, листы изолируются между собой лаком. Обмотки возбуждения 6 изготовляют из медного провода, как и в изготовлении электрических машин, и укладывают, изолируя лаком, в катушки, расположенные на главных полюсах 5.
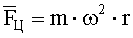
Каждый индуктор 4 (Фиг.2) создает свое независимое постоянное магнитное поле, силовые линии которого замыкаются через его главные полюсы 5, наконечники 7, корпус статора 2 и воздушный зазор с частью роторов 3, которая находится в магнитном поле данного индуктора 4.
Так как каждый статор 2 имеет два независимых индуктора 4, то их внутреннее пространство можно условно разделить на два сектора, в которых протекают магнитные поля индукторов 4. Разделение проходит через оси вращения роторов 3.
В данном варианте устройства силовые линии магнитных полей индукторов 4, генерируемые ими, имеют в плоскости сечения А-А геометрическую форму, близкую к эллипсу. Силовые линии магнитных полей (магнитные потоки) одного статора 2 в вариантах исполнения устройства могут иметь другую геометрическую форму, зависящую от расположения главных полюсов индукторов 4 во внутреннем пространстве статора 2. Также магнитные поля индукторов 4 в вариантах частного исполнения устройства могут как пересекаться во внутреннем пространстве его статоров 2, так и течь отдельно.
Направление течения электрического тока в обмотках возбуждения 6 для соблюдения полярности магнитных полей индукторов 4 статоров 2 определяется по правилу правой руки, расположив пальцы правой руки по направлению тока в витках обмоток 6, тогда большой палец укажет направление силовой магнитной линии (см.: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 2, стр.28).
Обмотка катушек 6 каждого сектора индуктора 4 подключается к электрическому току отдельно и, таким образом, у каждого индуктора 4 есть свои электрические и магнитные цепи. Каждый статор 2 взаимодействует со своим ротором 3.
Как известно, в электрических машинах в качестве источника магнитного поля обычно применяется катушка с числом витков w, по которой протекает ток I (См: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 2.4, стр.31). Единицей измерения магнитодвижущей силы является Ампер-виток. Магнитодвижущая сила 
Данная формула приводит общую магнитодвижущую силу 
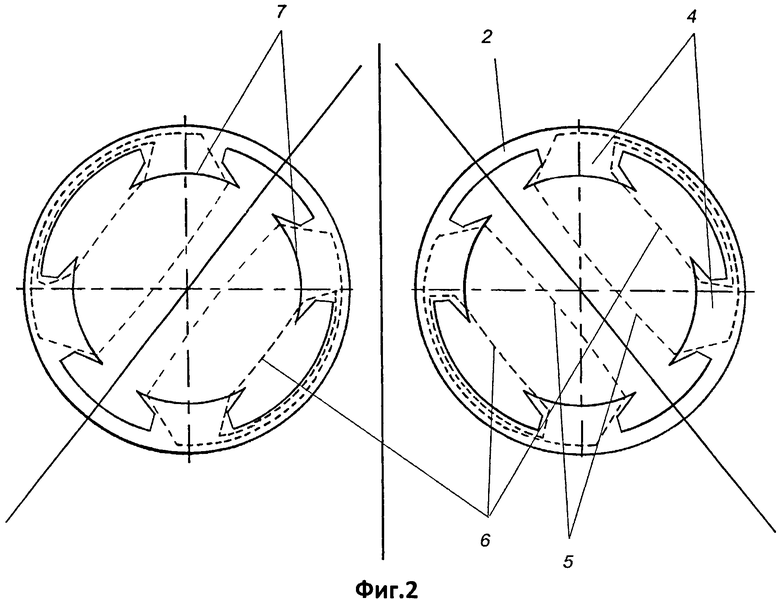
Внутри статоров 2 (Фиг.3) на подшипниках с осями закреплены валы 8 каждого из роторов 3.
Подшипники валов 8, на которых вращаются роторы 3, крепятся с таким условием, чтобы оси валов 8 были расположены в одной плоскости и чтобы оси валов 8 совпадали с осевыми линиями статоров 2. Подшипники крепятся, как у электрических машин, на подшипниковых щитах статоров 2 или к станине 1.
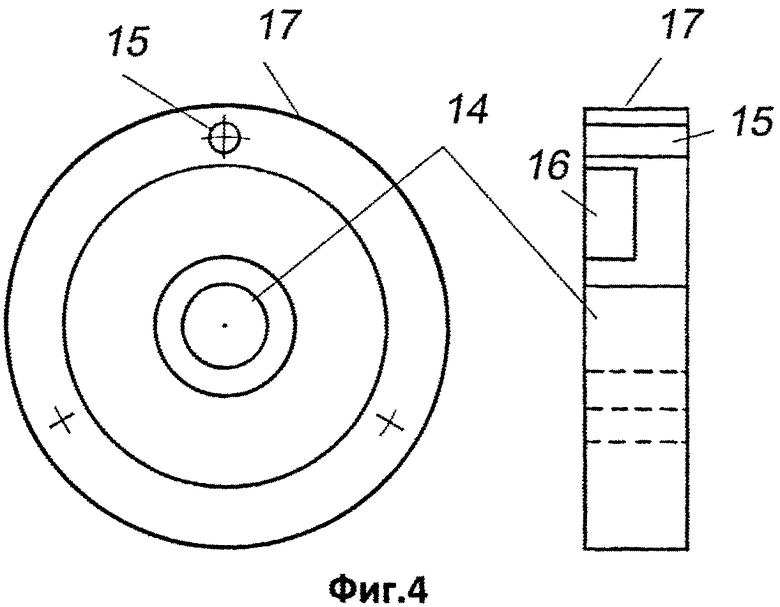
Подшипниковый щит 17 устройства (Фиг.4), как и у электрических машин, представляет собой металлическую пластину с отверстием 14 для вала 8 ротора 3 и его подшипника, выполненную ответно его наружной форме (внешней обойме). В подшипниковом щите 17 изготовляют пазы 16 или отверстия 19 и 15 для крепежных элементов, выполненные ответно крепежным элементам на статоре 2 или второму подшипниковому щиту вала 8 ротора 3 в случае их соединения друг с другом крепежными элементами, проходящими вне пространства статора 2, либо к станине 1. Назначение подшипниковых щитов 17 устройства, как и у электрических машин, - удержание валов 8 роторов 3 в пространстве статоров 2.
При производстве устройства можно применить любой вид подшипников, подходящих по предъявляемым им требованиям (величина трения в сопряжении, способность нести определенную нагрузку, износостойкость и т.д.). Как известно, (см.: автор Тимофеев С.И., Детали машин 2007 г., издание 2-е Ростов на Дону, издательство Феникс, стр.333), подшипники являются опорами звеньев механизмов. Наиболее распространенные из них подшипники качения и скольжения.
Для синхронизации вращения роторов 3 на их валах 8 вне внутреннего пространства статоров 2 могут быть закреплены колеса 9 одноступенчатой цилиндрической передачи с передаточным числом 1×1 (Фиг.1), представляющие собой рядовый цилиндрический редуктор. Колеса 9 идентичны друг другу и вращаются в плоскости, параллельной плоскости вращения роторов 3. Как известно, (см: автор Тимофеев С.И., Детали машин 2007 г., издание 2-е Ростов на Дону, издательство Феникс, стр.148-149), зубчатые механизмы применяют в машинах и агрегатах для передачи вращения с изменением угловой скорости. В данном варианте устройства колеса 9 вращаются с одинаковой угловой скоростью.
Использовать в кинематических схемах в вариантах устройств в зависимости от расположения валов 8 в пространстве можно зубчатые редукторы (цилиндрические, конические); клиноременные передачи, зубчато-ременные передачи, фрикционные передачи (См: автор Тимофеев С.И., Детали машин 2007 г., издание 2-е Ростов на Дону, издательство Феникс, стр.30, 128, 143).
Роторы 3 идентичны друг другу по всем параметрам и вращаются на своих валах 8 внутри своих статоров 2, причем один ротор против часовой стрелки, а другой по часовой стрелке.
Каждый ротор 3 (Фиг.3) представляет собой закрепленное на своем валу 8 цилиндрическое колесо, имеющее цилиндрический паз. Для данного варианта предусмотрено крепление колеса 10 на валу 8 шпонкой, также допустимо шлицевое соединение, посадка колеса 10 на вал 8 с натягом и т.д. В колесе 10 допустимо для каждого сегмента 12 вытачивать свой паз. Колесо 10 может иметь вид звездообразного колеса с количеством лучей, равных количеству сегментов 12, где на каждом луче крепится ось 11, колесо 10 может иметь геометрическую форму фигуры, имеющей осевую симметрию в плоскости своего вращения. Таким образом, единственным требованием к геометрической форме вала 8, колеса 10 и осей 11, как и для ротора 3 в сборе со всеми его элементами 12, в статическом состоянии является их осевая симметрия. Валы 8, колеса 10 и оси изготавливают из металлов и их сплавов. На каждой оси 11 закреплен один сегмент 12, который качается на своей оси относительно колеса 10 в плоскости вращения ротора 3, перпендикулярной его валу 8. Паз в колесе 10, как и его геометрическая форма, должны допускать свободное качание сегментов на осях 11, в пределах заданного угла, величина которого задается для варианта конкретного устройства. Качание сегмента 12 на оси 11 может происходить в сопряжении и оси 11 с сегментом 12, и оси 11 с колесом 10. В сопряжении, где происходит качание сегмента 12, допустимо применить любой вид подшипников, подходящих по предъявляемым им требованиям (величина трения в сопряжении, способность нести определенную нагрузку, износостойкость и т.д.). Как говорилось выше, все оси 11, сегменты 12 каждого ротора 3 идентичны друг другу, целью данного условия является избежание «биения» вала 8 ротора 3 на своих опорах ввиду его осевой несбалансированности.
Сегменты 12 изготовляются из материала, подходящего по прочностным характеристикам, для данного варианта - это металлы и их сплавы. В данном варианте устройства, в качестве примера, каждый ротор 3 имеет шесть сегментов 12, которые по физическим характеристикам являются эксцентриками с центром тяжести, расположенным на линии лежащей от оси 11 к линии окружности ротора 3. В качестве примера в этом варианте устройства данная линия совпадает с линией диаметра ротора 3.
Как известно (см.: автор Тимофеев С.И., Детали машин 2007 г., издание 2-е Ростов-на-Дону, издательство Феникс, стр.356), упругие элементы: пружины, резиновые втулки, рессоры служат амортизаторами, двигателями, замыкателями кинематических пар. Наиболее распространенные виды пружин: витые, спиральные, тарельчатые и кольцевые имеют различную форму. Рессоры представляют собой составные балки равного сопротивления изгибу, служат амортизаторами.
При использовании упругих элементов 13 в каждом зазоре между сегментами 12 допустимо применить от двух и более пружин. Количество упругих элементов 13 в виде рессор может быть любым, допустимо применять несколько рессор с любым количеством листов, которые крепятся в одном зазоре между сегментами 12.
Упругие элементы 13, связывающие сегменты 12 роторов 3, служат, как кинематические связи, при изменении геометрической формы роторов 3 во время работы устройства, при качании сегментов 12 на своих осях 11. Упругие элементы 13 позволяют роторам 3 при приложении на их сегменты 12 сил, вектора которых лежат в плоскости вращения роторов 3, менять свою геометрическую форму в пределах своих габаритов за счет качания сегментов 12 на своих осях 11, а при отсутствии действующих на них сил возвращать геометрическую форму роторов 3 (положение элементов ротора 3 относительно друг друга) в исходное положение. Также при изменении угловых скоростей сегментов 12 роторов 3 назначение упругих элементов 13 предотвратить столкновение сегментов 12 роторов 3 с целью недопущения деформации или разрушения сегментов 12.
Максимальное сжатие и растяжение упругих элементов 13 определятся минимально и максимально допустимыми зазорами между расположенными рядом сегментами 12 одного ротора 3 при его взаимодействии с обоими секторами своего статора 2.
Упругие элементы 13 в виде пружин, работающие на сжатие, в статическом состоянии роторов 3 должны быть несколько сжаты, а упругие элементы 13, работающие на растяжение, в статическом состоянии роторов 3 должны быть несколько растянуты. То есть при рабочем вращении роторов 3 упругие элементы 13, работающие на растяжение, при уменьшении зазора между сегментами 12 не должны провисать, а упругие элементы 13, работающие на сжатие, при увеличении зазора между сегментами 12 не должны испытывать нагрузки на растяжение. При использовании в качестве упругих элементов 13 рессор в статическом состоянии роторов 3 они должны находиться без нагрузок.
При подборе упругих элементов 13, которые будут использоваться в роторах 3, необходимо учитывать условия механического взаимодействия между сегментами 12 одного ротора. Упругие элементы 13 должны соответствовать предъявляемым к ним требованиям по показателям износостойкости и коэффициенту жесткости.
При известных величинах максимальных и минимальных зазоров между сегментами 12 расположенных рядом в плоскости вращения роторов 3 и сил взаимодействия между ними, коэффициент жесткости является главной величиной при определении величины силы упругости 
Как известно (см: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа. Глава XI, § 76, стр.185, шестой абзац), исходя из закона Гука для силы упругости 
где: с - коэффициент жесткости пружины (приводится в технических справочниках);
λ - удлинение (или сжатие) пружины.
Как известно (см.: автор Кочетов В.Т. и др., Сопротивление материалов 2004 г., издание 3-е Санкт-Петербург, издательство БХВ - Петербург, Глава 10.2, стр.193), внешние усилия, приложенные к балке и вызывающие ее деформацию, не нарушают равновесие балки. Балка рассматривается как система, на которую действуют активные и реактивные силы, лежащие в одной плоскости. Таким образом, при определении максимально возможной величины силы упругости
Упругие элементы 13 в виде пружин подлежат жесткой заделке обоими концами на телах сегментов 12. Упругие элементы 13 в виде рессор целесообразно крепить одним концом в жестко защемленной опоре, другим в подвижной опоре, позволяющей только продольное перемещение конца рессоры 13. Например, как в конструкции автомобилей (см.: автор Лобзин А.Ф. и др. Устройство и эксплуатация автомобилей… 1977 г., Москва, издательство ДОССААФ СССР, § 3.4, стр.196, рис.111; автор Е.В. Михайловский и др. Устройство автомобиля, 1981 г., Москва, издательство Машиностроение, раздел III, Глава 19 § 76, стр.241 второй, третий, четвертый абзац, стр.240, рис.192а).
Крепление упругих элементов 13 к сегментам роторов 12 осуществляется соединительными элементами. К соединительным элементам относятся: болты, шпильки, винты, гайки, заклепки, сварка (См.: автор Тимофеев С.И., Детали машин 2007 г., издание 2-е Ростов на Дону, издательство Феникс, стр.51, 69, 74).
Для крепления упругих элементов 13 наиболее подходят резьбовые и клепочные соединения, допустимо соединение упругих элементов 13 с сегментами 12 роторов 3 в кронштейнах, закрепленных к ним или изготовленных вместе с телом сегмента 12.
Все упругие элементы 13, соединяющие сегменты 12 в одном зазоре, должны быть идентичны друг другу по всем параметрам. Так как сегменты 12 идентичны друг другу по всем параметрам, места для крепления упругих элементов 13 выбираются на телах сегментов 12 также идентично.
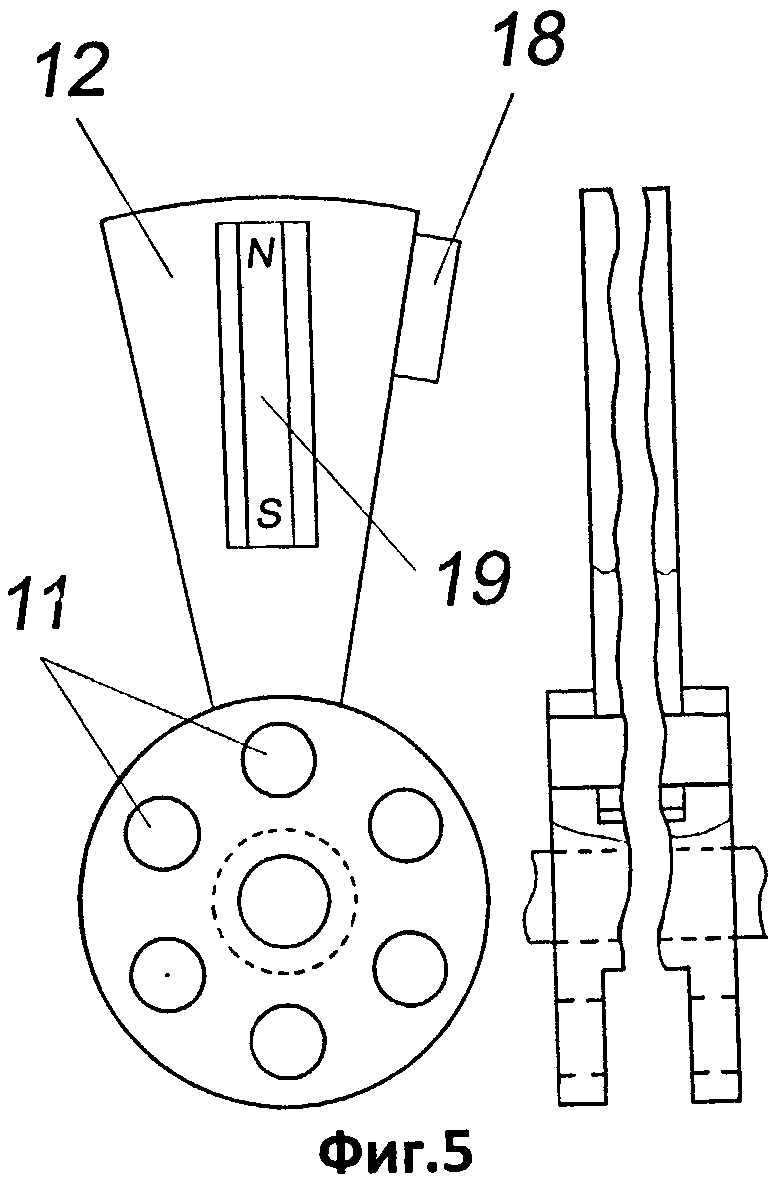
Для предотвращения повреждения сегментов 12 одного ротора 3 при их аварийном столкновении в местах возможного их столкновения допустимо закрепить отбойники 18, например резиновые шайбы (см. Фиг.5).
В теле каждого сегмента 12 вмонтирован электромагнит 19 (Фиг.5), состоящий из магнитного сердечника, набранного из листов электротехнической стали, и обмотки, представляющей собой катушку. Все электромагниты 19 сегментов 12 роторов 3 идентичны друг другу. Для упрощения объяснения принципа взаимодействия элементов устройства электромагниты 19 в данном варианте монтируются в сегментах 12 так, чтобы их магнитные сердечники и магнитные полюса лежали на радиусах сегментов 12 роторов 3 и один из полюсов взаимодействовал с магнитными полями индукторов 4 своего статора 2. Точное место монтажа электромагнитов 19 в тела сегментов 12 и расстояние между полюсами электромагнитов 19, зависящее от длины их сердечников, подбирается такой величины, при которой электромагниты 19 взаимодействуют с магнитными полями своего статора 2 одним полюсом, наиболее удаленным от оси вращения ротора 3. Тело сегмента 12 при использовании металлов и их сплавов будет служить в качестве радиатора для электромагнита 19.
Исходя из направления вращения роторов 3 и полярности главных полюсов индукторов 4 для данного варианта устройства все электромагниты 19 располагаются в телах сегментов 12 полюсом S к колесу 10, а полюсом N от колеса 10 к окружности диаметра ротора 3 (Фиг.5).
Электродвижущая сила 
где: I - электрический ток, проходящий через обмотку электромагнита 19;
w - число витков обмотки электромагнита 19.
Данная формула приводит общую магнитодвижущую силу 
Направление течения электрического тока для соблюдения полярности магнитных полюсов электромагнитов 19 сегментов 12 роторов 3 определяется по правилу правой руки (см.: автор Бутырин П.А. и др. Электротехника 2007 г., издательский центр Академия, Глава 2, стр.28).
Электромагниты 19 подключаются к электрическому току независимо друг от друга, через коллекторно-щеточный механизм.
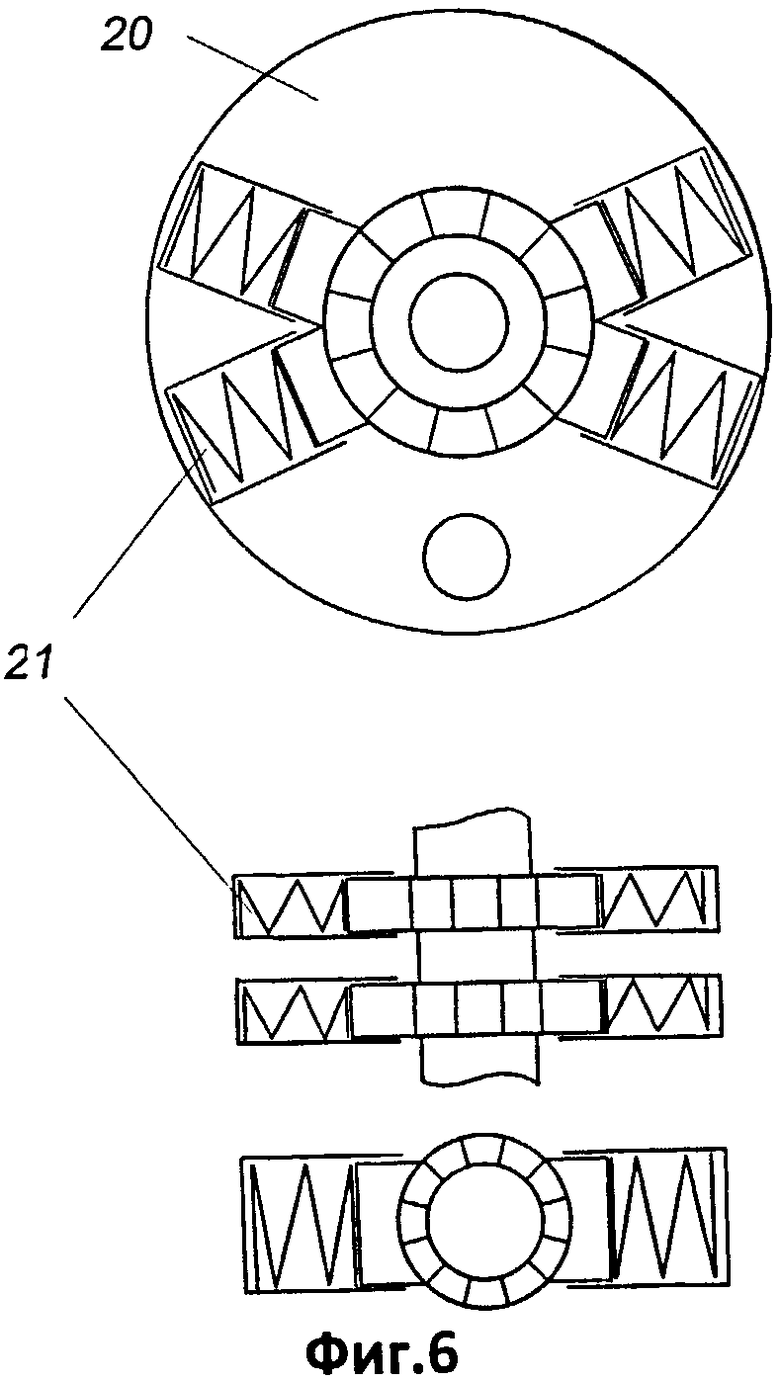
Коллектор 20 и щетки 21 (см. Фиг.6) для данного варианта устройства по устройству и технологии изготовления аналогичны коллектору электрических машин (см.: автор Бутырин П.А. и др. Электротехника 2007 г., издательский центр Академия, Глава 7, стр.116 второй абзац).
Коллектор 20 (Фиг.6) представляет собой два полых цилиндра, состоящих из клинообразных медных пластин, изолированных друг от друга, вала 8 и ротора 3, количество пластин на каждом цилиндре соответствует количеству сегментов 12 на роторе 3. Цилиндры коллектора 20 крепятся на валу 8 или цилиндрическом приливе колеса 10 ротора 3 (Фиг.6) соосно с ними так, чтобы расположение центра пластин на длине окружности цилиндров коллектора 20 совпадало с расположением радиусов сегментов 12 в статическом состоянии.
К двум пластинам, по одной на кольце коллектора 20, расположенным рядом вдоль оси ротора 3, и на радиусе сегмента 12 подключаются концы обмотки его электромагнита 19. Проводники, соединяющие обмотку электромагнита 19 и пластины коллектора 20 в месте соединения сегмента 12 и колеса 10, должны быть гибкими и хорошо изолированными, так как сегмент 12 в процессе работы устройства качается относительно колеса 10.
Щетки 21 (Фиг.6), по которым осуществляется электрический контакт, крепятся на статорах 2, в щеткодержателях 18, как и у электрических машин. Всего на каждый статор 2 щеток 21 четыре, по две на каждый индуктор 4 сектора статора 2. Геометрическая форма щеток 21 в месте контакта с коллектором, ответная ему, одна пара щеток 21 сектора статора 2 подает электрический ток на все электромагниты 19 сегментов 12 роторов 3, находящихся в зоне действия данного сектора статора 2. Величина углов прилегания щеток 21 к коллектору 20 такова, что на пластины коллектора 20 сегментов 12, находящихся в верхних и нижних мертвых точках или рядом с ними, электрический ток не подается. Точные моменты контакта щеток 21 и пластин коллектора 20, отвечающих за включение и выключение электромагнитов 19, подбираются для конкретной конструкции устройства и зависят от величины углов секторов статоров 2, в которых действует магнитное поле индукторов 4. Таким образом, электромагниты 19 сегментов 12 роторов 3, проходящих сектора статоров 2 между секторами действия индукторов 4, остаются выключенными. Внутренне пространство статоров 2 в вариантах устройства условно делится на четыре сектора.
В вариантах изготовления устройств при достаточно широких углах секторов прилегания щеток 21 к кольцам коллектора 20 для достижения ими необходимого усилия прилегания, избежания излома щеток и их преждевременного износа одну щетку 21 целесообразно заменить блоком щеток (Фиг.6), который состоит из нескольких щеток 21 и щеткодержателей, которые крепятся на статоре 2 или станине 1. Каждая щетка 21 из блока щеток 21 подключаются к электрическому току параллельно другим. Крепление щеткодержателей к статору 2 осуществляется таким образом, что рабочие поверхности щеток 21 одного блока, совместно прилегая к кольцу коллектора 20, образуют одну рабочую поверхность в пределах заданного значения угла сектора статора 2. Таким образом, граница соприкосновения торцевых плоскостей соседних щеток 21 одного блока совпадает с окружностью диаметра коллекторного кольца 20 (его рабочей поверхностью).
Для соблюдения принципа работы устройства статоры 2 были разделены на два сектора, далее необходимо определить, в каком из них сегменты 12 будут увеличивать свою угловую скорость - данный сектор будет сектором ускорения, а в каком секторе сегменты 12 будут уменьшать свою угловую скорость - данный сектор будет сектором торможения. Таким образом, индукторы 4 увеличивают угловую скорость ω сегментов 12, а индукторы 4 уменьшают угловую скорость ω сегментов 12 в секторах своего воздействия на роторы 3. То есть, если принять угол поворота ϕ относительно точки D1 или D2 одного сегмента 12, находящегося в верхней мертвой точке за 0°, то сектор ускорения каждого статора 2 будет находиться в пределах ϕ от 0° до 180°, а сектор торможения каждого статора 2 будет находиться в пределах ϕ от 180° до 360° по ходу направления вращения роторов 3.
Пуск устройства осуществляется подключением его электрических цепей к постоянному электрическому току. Регулирование частоты оборотов роторов 3 можно осуществить изменением напряжения электрического тока U в обмотках 6 статоров 2 и электромагнитов 19, изменением сопротивления R обмоток 6 индукторов 4 или обмоток электромагнитов 19, изменением магнитного потока Ф индукторов 4 с помощью тока возбуждения I. В данном варианте для управления устройством в электрические цепи индукторов 4 статоров 2 и (или) электромагнитов 19 включаются реостаты. По классификации электрических машин такое устройство можно отнести к электрической машине постоянного тока независимого возбуждения.
При пуске устройства к электрическому току подключаются индукторы 4 статоров 2, отвечающие за угловое ускорение сегментов 12 роторов 3, и щетки 21 (при их наличии в вариантах устройства) электромагнитов 19 сегментов 12 роторов 3, находящиеся в секторах их действия. Электрический ток, протекающий в обмотках электромагнитов 19 сегментов 12 роторов 3, создает их магнитные поля. Полюса N магнитов 19 взаимодействуют с магнитными полями индукторов 4 секторов ускорения статоров 2, в результате образуются магнитодвижущие силы 
Величину магнитодвижущей силы 


При рассмотрении движения роторов 3 и сегментов 12 в данной системе сил, учитывая, что роторы 3 могут только вращаться на своих валах 8, а сегменты 12, вращаясь вместе с роторами 3, способны качаться на осях 11, можно допустить, что на них будут действовать:
- вращающие моменты MD;
- моменты осевой инерции JP;
- центробежные силы 
- силы реакций RЦ центробежных сил 
Из дифференциального уравнения вращательного движения твердого тела следует (см.: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа, Глава XXVI, § 128, стр.323, формула 66), что произведение момента инерции тела относительно оси вращения на угловое ускорение равно вращающему моменту. Таким образом, величина углового ускорения ε роторов 3 зависит от величин их осевого момента инерции JP и вращающего момента MD и определяется по формуле:
MD=JP·ε,
где: JP - осевой момент инерции ротора 3;
ε - угловое ускорение вращающегося ротора 3.
Как известно (см: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа, Глава XXV, § 122, стр.305, последний абзац), вращающий момент, действующий на сегмент 12, образовывает произведение проекции силы
Вращающий момент M12, действующий на сегмент 12, определяется по формуле:

Вращающий момент MD, действующий на ротор 3 через один сегмент 12 без учета его качания на оси 11, определяется по формуле:

Общая сумма вращающего момента MD, действующая на ротор 3 без учета качания сегментов 12, определяется суммой вращающих моментов, действующих на каждый сегмент 12 ротора 3 (MD=ΣM12).
Как известно (см: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа. Глава XXI, § 102, стр.265, первый абзац), моментом инерции тела (системы) относительно данной оси (или осевым моментом инерции) называется скалярная величина, равная сумме произведений масс всех точек тела (системы) на квадраты их расстояний от этой оси. Единицей измерения осевого момента инерции является 1 кг·м2. Часто в ходе расчетов пользуются понятием радиуса инерции (см: автор Тарг С.М. Основы теоретической механики 2005 г., издательство Высшая школа. Глава XXI, § 102, стр.266, шестой абзац), радиус инерции тела относительно оси геометрически равен расстоянию от оси до точки, в которой надо сосредоточить массу всего тела.
Исходя из определения осевого момента инерции радиуса инерции и приведенных в данном источнике формул можно определить, что осевые моменты инерции J элементов роторов 3 в данном варианте устройства определяются по формулам:
Осевой момент инерции J вала 8:
J8=m·L2/2, где: m - масса вала 8; L - длина вала 8.
Осевой момент инерции J зубчатого колеса 9:
J9≈m·(R2+r2)/2, где: m - масса колеса 9; R - радиус колеса 9; r - радиус отверстия в колесе 9.
Осевой момент инерции J колеса 10:
J10≈m·(R2+r2)/2, где: m - масса колеса 10; R - радиус колеса 10; r - радиус отверстия в колесе 10.
Осевой момент инерции J оси 11:
J11=m·R2, где: m - масса оси 11; R - радиус осевой инерции оси 11, равный расстоянию от оси ротора 3 до центра тяжести оси 11.
Осевой момент инерции J сегмента 12:
J12=m·R2, где: m - масса сегмента 12; R - радиус осевой инерции сегмента 12, равный расстоянию от оси ротора 3 до центра тяжести G сегмента 12.
Осевой момент инерции J упругого элемента 13:
J13=m·R2, где: m - масса упругого элемента 13; R - радиус осевой инерции упругого элемента 13, равный расстоянию от оси ротора 3 до центра тяжести упругого элемента 13. В разных вариантах устройств геометрическая форма элементов роторов 3 может отличаться от приведенной выше. Момент инерции сложной фигуры можно вычислить как сумму моментов инерции простых фигур (см: автор Эрдеди А.А. и др. Техническая механика 1991 г., издательство Высшая школа, Глава 21, § 21.3, стр.203). Осевой момент инерции JP ротора 3 в вариантах его геометрической формы равен сумме всех осевых моментов инерции J элементов, его составляющих. Осевые моменты инерции некоторых тел приводятся в справочной литературе (например, см.: автор Кочетов В.Т. и др., Сопротивление материалов 2004 г., издание 3-е Санкт-Петербург, издательство БХВ - Петербург, Приложение 2, стр.508-511; автор Эрдеди А.А. и др. Техническая механика 1991 г., издательство Высшая школа, стр.148.)
Осевой момент инерции JP ротора 3 для данного варианта устройства определяется по формуле:
JP=J8+J9+J10+ΣJ11+ΣJ12+ΣJ13,
где: J8 - осевой момент инерции вала 8;
J9 - осевой момент инерции зубчатого колеса 9;
J10 - осевой момент инерции колеса 10;
ΣJ11 - сумма осевых моментов инерции осей 11 ротора 3;
ΣJ12 - сумма осевых моментов инерции сегментов 12 ротора 3;
ΣJ13 - сумма осевых моментов инерции упругих элементов 13 ротора 3.
Также во время вращения роторов 3 на сегменты 12 и их элементы будут действовать центробежные силы 
Центробежные силы 
Формула центробежной силы (см: автор Эрдеди А.А. и др. Техническая механика 1991 г., издательство Высшая школа, Глава 14, § 14.2, стр.128), действующей на сегмент 12:
где: m - масса сегмента 12;
ω - угловая скорость сегмента 12;
r - радиус, равный расстоянию от оси ротора 3 до точки G центра тяжести сегмента 12.
Зависимость угловой скорости ω и количества оборотов n роторов 3 (см. автор Тарг С.M. Основы теоретической механики 2005 г., издательство Высшая школа. Глава X, § 50, стр.121-122, формула 41) определяется по формуле:
ω=π·n/30≈0,1n, где: π - 3,14 (общеизвестная величина); n - число оборотов в минуту ротора 3.
Единицей измерения угловой скорости ω является рад/с (радиан в секунду).
Согласно третьему закону Ньютона о равенстве действия и противодействия (см. автор Тарг С.M. Основы теоретической механики 2005 г., издательство Высшая школа, Глава XV, 18 § 74, стр.183, абзац десятый) модули сил
На время работы только секторов ускорения статоров 2 (взаимодействия индукторов 4 с сегментами 12, находящимися в секторе их действия) упругую деформацию упругих элементов 13 и их реакции на нее можно не учитывать, т.к. остальные сегменты 12 через упругие элементы 13 также будут получать угловое ускорение. Движением одного сегмента 12 в секторе ускорения на данном этапе можно характеризовать движение всех сегментов 12 роторов 3. Кроме того, при определенном соотношении осевых моментов инерции JP сегментов 12, жесткости упругих элементов 13 и величины вращающих моментов MD, действующих на сегменты 12, упругие элементы 13 могут передавать усилие без существенной упругой деформации.
Увеличение угловой скорости ω роторов 3 происходит до момента достижения ими заданного количества оборотов n. По достижении необходимого количества оборотов n роторов 3 к электрическому току подключаются индукторы 4 статоров 2, и щетки 21 (при их наличии в вариантах устройства) электромагнитов 19 сегментов 12 роторов 3, находящиеся в секторах их действия. Электрический ток, протекающий в обмотках электромагнитов 19 сегментов 12 роторов 3 и индукторах 4, создает их магнитные поля. Полюса N магнитов 19 взаимодействуют с магнитными полями индукторов 4 секторов торможения статоров 2, в результате образуются магнитодвижущие силы




На сегменты 12 роторов 3 в секторах торможения будут действовать вращающие моменты МД, направленные в противоположную вращению роторов 3 сторону, центробежные силы
При постоянном вращении роторов 3 с заданной угловой скоростью, при взаимодействии их сегментов 12 с обоими секторами статоров 2 роторы 3 будут менять свою геометрическую форму. Изменение геометрической формы роторов 3 будет происходить в плоскости (плоскостях) их вращения.
Рассмотрев движение сегментов 12 относительно колеса 10, можно увидеть:
Сегменты 12 роторов 3, взаимодействующие со своими индукторами 4, увеличивая свою угловую скорость ω относительно угловой скорости ω колеса 10, сжимая упругие элементы 13, находящиеся от них впереди по ходу вращения ротора 3 и растягивая упругие элементы 13, находящиеся от них сзади по ходу вращения ротора 3, отклонятся на своих осях 11 вперед по ходу вращения роторов 3. Во время взаимодействия с индукторами 4 сегменты 12 прикладывают кинетическую энергию Ek к упругим элементам 13 и по мере упругой деформации упругих элементов 13 и накопления ими потенциальной энергии Ер угловая скорость ω сегментов 12 будет уравниваться с угловой скоростью (л) колеса 10. По окончании взаимодействия с индукторами 4 сегменты 12, прошедшие сектора их действия, удерживая в сжатом состоянии упругие элементы 13, находящиеся впереди по ходу вращения ротора 3, под их давлением начнут отклоняться на своих осях 11 в исходное положение.
При проходе нижних мертвых точек угловая скорость ω сегментов 12 будет равна угловой скорости и колеса 10. После прохождения нижних мертвых точек сегменты 12 под давлением упругих элементов 13, находящихся впереди по ходу вращения ротора 3, начнут отклоняться на своих осях 11 назад по ходу вращения роторов 3, уменьшая свою угловую скорость ω относительно угловой скорости ω колеса 10.
Сегменты 12 роторов 3, взаимодействующие с индукторами 4, уменьшая свою угловую скорость ω относительно угловой скорости ω колеса 10, растягивая упругие элементы 13, находящиеся впереди них по ходу вращения ротора 3, и сжимая упругие элементы 13, находящиеся от них сзади по ходу вращения ротора 3, отклонятся на своих осях 11 назад по ходу вращения ротора 3. Углы ф11 и ф21 радиусов сегментов 12 будут меньше их углов в статическом состоянии. Во время взаимодействия с индукторами 4 сегменты 12 прикладывают кинетическую энергию Ek к упругим элементам 13 и по мере упругой деформации упругих элементов 13 и накопления ими потенциальной энергии Ер угловая скорость ω сегментов 12 будет уравниваться с угловой скоростью ω колеса 10.
Сегменты 12, прошедшие сектора действия индукторов 4, удерживая упругие элементы 13, находящиеся впереди от них по ходу вращения ротора 3 в растянутом состоянии, под их давлением начнут отклоняться на своих осях 11 в исходное положение. При проходе верхних мертвых точек угловая скорость ω сегментов 12 будет равна угловой скорости и колеса 10. Углы радиусов сегментов 12 в верхних мертвых точках будут равны их углам в статическом состоянии.
После прохождения верхних мертвых точек сегменты 12 под давлением упругих элементов 13, находящиеся впереди от них по ходу вращения ротора 3, начнут отклоняться на своих осях 11 вперед по ходу вращения роторов 3, увеличивая свою угловую скорость ω относительно угловой скорости ω колеса 10.
Здесь следует отметить, что увеличение и уменьшение угловой скорости ω сегментов 12 происходит по дугам, не лежащим на окружностях (диаметрах) роторов 3. Отклонение дуг от окружности роторов 3 зависит от величин углов качания сегментов 12, что в целом на технический результат не повлияет.
Цикл будет повторяться с каждым сегментом 12 при каждом обороте ротора 3 вокруг своей оси на валу 8, при этом величина угловой скорости ω колес 10, зависящая от количества оборотов n роторов 3 за единицу времени, влияет только на количество циклов за единицу времени.
Потенциальная энергия Ер, накапливаемая упругими элементами 13 при их упругой деформации, прикладываемая к сегментам 12 во время их взаимодействия с индукторами 4, в данной системе имеет размерность обычной силы и равна силам, прикладываемым ко всем упругим элементам 13 одного ротора 3.
При определении геометрической формы и конкретных размеров сегментов 12 для соблюдения принципа действия устройства необходимо соблюдать баланс между величинами размеров ширины сегментов 12 и зазоров между ними, позволяющий необходимому количеству сегментов 12 одного ротора 3 группироваться в заданном секторе окружности вращения ротора 3. Исходя из принципа действия устройства для достаточной массы m сегментов 12 они должны занимать сектор не менее 20% (72°) от окружности ротора 3 (360°). Для достаточного группирования сегментов 12 они должны занимать сектор не более 70% (252°) от окружности ротора 3 (360°). Остальной сектор окружности ротора 3 (360°) делится на равные зазоры по количеству сегментов 12.
Для достижения максимального технического результата при прилегании группирующихся сегментов 12 друг к другу их упругие элементы 13 допустимо размещать в пазах тел сегментов 12. Отбойники 18 изготовляют с минимальным выступом в зазор между сегментами 12. При сжатии упругих элементов их тела располагаются в данных пазах, позволяя сегментам 12 практически полностью смыкаться при группировании. В вариантах устройства при отсутствии технической возможности размещения упругих элементов 13 в пазах сегментов 12 их допустимо разместить на плоскостях сегментов 12, параллельных плоскости их вращения.
Учитывая принцип взаимодействия элементов устройства, когда сегменты 12 роторов 3 поочередно взаимодействуют с индукторами 4, то можно сделать вывод: в опорах валов 8 будет происходить «биение», устройство будет вибрировать. Для исключения данного эффекта тела роторов 3 «делятся» на наиболее возможное количество сегментов 12, тогда «биение» на его валах 8 будет большей амплитуды и менее выраженное. Для полного удаления эффекта «биения» валов 8 на опорах целесообразно компоновать на одном вале 8 несколько колес 10 с сегментами 12 и упругими элементами 13. Таким образом, на одном вале 8 будет закреплено несколько роторов 3, их колеса 10 крепятся на равных углах относительно друг друга. Углы крепления колес 10 с вершинами в точке оси вала 8 лежат в параллельных плоскостях, перпендикулярных оси вала 8. Величина данных углов равняется величине окружности в градусах (360°), разделенной на количество роторов 3 на одном вале 8. Точкой отсчета для начала определения данных углов может быть любая точка окружности какого либо колеса 10.
Во время работы устройства сегменты 12 роторов 3 будут поочередно через равные промежутки времени начинать и заканчивать взаимодействие с индукторами 4 статоров 2, одновременно с одним индуктором 4 будут взаимодействовать несколько сегментов 12 и движение устройства будет происходить без существенной вибрации. Подключая к электрическому току коллекторно-щеточные механизмы всех или части роторов 3, вращающихся на одном вале 8, и изменяя в них силу текущего тока I, можно изменять величину сил и реакций, действующих на ось вала 8 на разном расстоянии от его опор, и, как следствие, мощность устройства и направление его движения.
При такой компоновке сектора ускорения и торможения в пространстве статоров 2 целесообразно разделить не только в плоскости, перпендикулярной плоскости вращения роторов 3, но и в плоскостях, параллельных плоскостям вращения роторов 3, по границам своих магнитных полей.
Кроме того, при такой компоновке роторов 3 можно отказаться от применения в конструкции устройства колес 9 (кинематической передачи). В нужном случае синхронизация вращения валов 8 будет обеспечиваться управлением силами, действующими на сегменты 12 в его статорах 2, в изложенном в качестве примера варианте - реостатами электрической схемы устройства.
Преимуществом компоновки, когда валы 8 вращаются независимо и на них закреплено несколько роторов 3, является возможность управлять направлением движения устройства, управляя силами взаимодействия между статорами 2 и роторами 3, расположенными по разные стороны и вдоль осей валов 8. Для управления силами, действующими в устройстве, вдоль осей валов 8 статоры 2 устройства компонуются двумя и более парами независимых индукторов 4, расположенных вдоль оси вала 8, или статорами 2, также расположенными вдоль осей валов 8 и взаимодействующими с роторами 3, закрепленными на одном вале 8. Также технически возможно изготовить валы 8 как оси, когда они не вращаются, жестко закреплены в своих опорах, а все роторы 3 будут соосно вращаться на валах (осях) 8 на своих подшипниках. При независимом вращении роторов 3 на одной оси 8 направление их вращения может быть разным. При такой компоновке валов 8 колесами 10 устройство может иметь как один вал 8, так и несколько валов 8. При этом коллекторы каждого ротора 3 крепятся на каждом колесе 10 ротора 3 и их щетки на статоре 2 или станине 1 ответно им.
Главными элементами устройства являются роторы 3, взаимодействующие с индукторами 4 статоров 2, выше оговаривалось, что устройство имеет группу статоров 2 и группу роторов 3. Количество статоров 2 и роторов 3 может быть любым. При использовании устройства на различных авиасудомоделях и механизмах возможны практические любые варианты расположения в пространстве статоров 2, роторов 3 и их осей вращения. Единственным требованием при компоновке устройства или группы устройств является требование: векторная сумма реакций группы всех статоров 2 в системе сил, действующих в устройстве или группе устройств, должна совпадать с требуемым направлением движения авиасудомодели или механизма.
Также возможны варианты устройств с группой статоров 2, где они объединены в одну конструкцию. В таком варианте у нескольких статоров 2 часть индукторов 4 и их обмотки 6 и ярмо могут быть как объединены, так и быть независимы. Это позволит более эффективно использовать внутреннее пространство статоров 2, насыщенное магнитным полем, и уменьшить общие габариты одного устройства, содержащего группу статоров 2.
При компоновке устройства группой индукторов 4 в объединенном секторе статоров 2 увеличится его надежность, так как магнитные поля нескольких независимых индукторов 4 будут протекать в пространстве одного сектора статоров 2 и взаимодействовать с роторами 3, вращающимися на разных валах 8. При выходе из строя одного их независимых индукторов 4 магнитное поле в пространстве сектора группы объединенных статоров 2 будет создаваться другими индукторами 4.
Заявленная механическая конструкция устройства не имеет существенных недостатков, но для ее эффективной и надежной работы необходимо устранить недостатки, упущенные выше в принципиальной схеме взаимодействия его элементов как электрической машины. При рассмотрении устройства и принципа взаимодействия элементов устройства как электрической машины возможны его варианты в виде электрической машины постоянного и переменного тока по конструкции как асинхронной, синхронной, электрической машины с вариантами коллекторно-щеточного механизма и электрической машины без коллекторно-щеточного механизма.
При вариантах изготовления устройства как электрической машины принцип механического взаимодействия статоров 2 с роторами 3 и принцип действия устройства не меняются.
Для устройства в вариантах исполнения как электрической машины переменного электрического тока индукция В и ток I в каждый момент времени будут распределены вдоль сектора статора по синусоидальному закону так же, как и у электрической машины переменного тока (См: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.5, стр.131 пятый абзац).
В устройстве постоянного тока при взаимодействии магнитных потоков индукторов 4 и электромагнитов 19 в секторах торможения статоров 2 будет происходить их искривление и рассеивание, что приведет к потерям энергии, перегреву обмоток 6 и при пробое изоляции от высокой температуры выведет его из строя. Для устранения данного недостатка на практике целесообразно применить способность электрических машин к обратимости, что не вызовет существенных изменений конструкции. Как известно, электрические машины могут быть обратимы (См: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.2, стр.112 абзац второй), то есть работать и как двигатель, и как генератор.
При имеющемся конструктивном разделении статоров 2 на сектора и их индукторы 4 (устройство имеет расщепленные обмотки 6 статоров 2) целесообразно применить схему, когда секторы ускорения будут работать в режиме двигателя, а секторы торможения в режиме генератора. В режиме электродвигателя магнитное поле индуктора 4 статора 2 «ведет» магнитные поля электромагнитов 19 сегментов 12 ротора 3, прикладывая к ним вращающий момент, а в режиме генератора магнитные поля электромагнитов 19 сегментов 12 ротора 3 «ведут» магнитное поле индуктора 4 статора 2, который прикладывает к ним тормозной момент. Обмотки 6 индукторов 4 секторов торможения статоров 2 будут вырабатывать электрический ток, который в дальнейшем будет потребляться обмотками 6 индукторов 4 секторов ускорения статоров 2 или обмотками электромагнитов 19 сегментов 12, что заметно улучшит экономичность устройства.
Роторы 3 будут представлять собой ротор электрической машины, «поделенный» на сегменты 12, каждый их которых содержит независимую катушку-электромагнит 19, который имеет свойство работать и в режиме электродвигателя, и в режиме генератора электрического тока. В варианте, приведенном в качестве примера, для объяснения принципа взаимодействия элементов устройства электромагниты 19 взаимодействуют с магнитными полями индукторов 4 одним полюсом, что упрощает понимание его принципа действия, с точки зрения теоретической механики. Для избежания потерь в магнитных потоках роторов 3 электромагниты 19 в вариантах устройства необходимо монтировать в сегментах 12 так, чтобы их сердечники и главные полюсы лежали на касательных окружности ротора 3 (перпендикуляре радиуса сегмента 12). При таком расположении электромагнитов 19 оба их главных полюса, как и вся обмотка электромагнитов 19, будут взаимодействовать с магнитным полем индуктора 4. Ротор 3 на электрической схеме будет аналогичен ротору электрической машины, в котором катушки электромагнитов 19 между собой не соединяются (См: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.3, стр.119, рис.7.5).
Как говорилось выше, при такой электрической схеме устройства принцип его действия, вектора сил и их модули, прилагаемые к роторам 3, остаются прежними. Корпусы статоров 2, изготовленные из ферромагнитного материала, разделяются на части по количеству индукторов 4 с целью предотвращения работы ярма статоров 2 в режиме трансформатора. Части корпусов статоров 2, поделенные на сектора индукторами 4, монтируются на устройстве отдельно, их магнитные потоки, проходящие по ярму статоров 2, изолируются друг от друга изоляцией из диэлектрического материала. Как вариант, индукторы 4 одного статора 2 могут иметь воздушный зазор, который не даст их магнитным потокам Ф пересекаться. Статоры 2 устройства в таком виде по принципу работы и устройству практически не отличаются от статоров электрических машин. Катушки обмоток электромагнитов 19 сегментов 12 между собой не соединяются, т.к. щетки 21 фактически будут соединять их в заданных секторах статоров 2 параллельным соединением. Назначение коллекторно-щеточного механизма устройства заключается не только в своевременном включении и выключении обмоток электромагнитов 19 сегментов 12, но и в коммутации направления течения электрического тока.
Учитывая независимую коммутацию электромагнитов 19 сегментов 12 по секторам, в секторе торможения электрический ток может вырабатывать как индуктор 4 статора 2, так и обмотки электромагнитов 19 сегментов 12. В таком варианте ротора 3 при четном количестве сегментов 12 обмотки сегментов 12 в статическом состоянии, расположенных на одной линии диаметра ротора 3, соединяются гибкими изолированными проводниками. Коллекторно-щеточные механизмы монтируются только в секторах ускорения статоров 2. Щетки 21 подают полный ток I только на время увеличения оборотов n роторов 3 при выключенной (незамкнутой электрической цепи) обмотке 6 индукторов 4 секторов торможения. Здесь следует отметить, что щетки 21 фактически подают электрический ток на пары электромагнитов 19 сегментов 12, находящихся в разных секторах статоров 2, магнитные поля индукторов 4 будут «вести» магнитные поля электромагнитов 19 только в секторах ускорения статоров 2. После достижения роторами 3 необходимых оборотов n включаются обмотки 6 индуктора 4 сектора торможения. При постоянной работе устройства обмотки электромагнитов 19 сегментов 12 в секторе торможения, выступающие в роли генератора, подпитывают обмотки электромагнитов 19 сегментов 12 в секторе ускорения. Далее ток 1 подается на щетки 21 через реостат для поддержания заданного количества оборотов n роторов 3, что существенно снизит на них нагрузки и уменьшит искрение в месте их контакта с коллектором. Наличие двух пар щеток 21 или блоков щеток 21 коллекторно-щеточного механизма допускает, что в обмотках электромагнитов 19 сегментов 12 течение электрического тока будет происходить как в одном направлении, так и в разных направлениях. При соединении обмоток электромагнитов 19 сегментов 12 одного ротора 3 к электрическому току, когда направление течения электрического тока в них будет иметь разное направление, возможно изменение полярности их электромагнитов 19, зависящее от того, в каком секторе статора 2 они находятся, что при разделенных статорах 2 и соответствующем соблюдении в свою очередь их полярности на технический результат не повлияет.
В варианте без изменения полярности магнитов 19 в секторах статоров 2 индукторы 4 и статоры 2 могут быть изготовлены как электрическая машина с расщепленной обмоткой без разделения ярма статоров 2 на части.
Устройство может иметь конструкцию как электрическая машина переменного тока в следующем варианте - асинхронная. Как известно (См: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.5, стр.125-128), статор электрической машины переменного тока (асинхронной, синхронной) изготовляется из листов электротехнической стали, листы изолируют друг от друга лаком и собирают в пакет, который образует корпус статора. Статор содержит пазы, в которые укладывается обмотка, представляющая собой катушки, сдвинутые относительно друг друга на 120 градусов, по которым протекают токи трехфазной цепи. Результирующее магнитное поле характеризуется индукцией В, постоянной по величине, которая перемещается вокруг оси катушек с угловой скоростью ω. Ротор асинхронного двигателя изготовляют из листов электротехнической стали. В пазы укладывают обмотку, чаще всего закороченные металлическими кольцами стержни. Трехфазная обмотка статора создает в его пространстве вращающееся магнитное поле. Вращающееся магнитное поле статора, пронизывая магнитную систему ротора, наводит в нем вихревые токи. Вихревые токи взаимодействуют с магнитным полем статора, в результате появляется электромагнитная сила, происходит вращение ротора.
Из принципа действия устройства для статоров 2 важно течение магнитных потоков в их пространствах в заданном направлении. Использование трехфазного переменного тока для создания в индукторах 4 устройства магнитного поля возможно по принципу асинхронной электрической машины (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.5, стр.126, абзац 4, 5). Катушки 6 (секции обмоток статора), создающие магнитное поле в индукторах 4 статоров 2 устройства размещаются в их пространствах не под углами 120 градусов, а на равных углах в пределах пространства, занимаемого сектором статора 2.
Вместо вращающегося магнитного поля в индукторах 4 возникает текущее по пространству сектора статора 2 магнитное поле. Ярмо статоров 2 набирается из пластин электротехнической стали и изолируется между собой лаком. Корпусы статоров 2 разделяются на части по количеству индукторов 4 с целью предотвращения пересечения вихревых токов, вызываемых магнитными потоками. Части корпусов статоров 2 изготовляются и монтируются на станине 1 устройства отдельно, их магнитные потоки Ф, проходящие по ярму статоров 2, изолируются друг от друга изоляцией из диэлектрического материала. В сегменты 12 монтируются пакеты, изготовленные из листов электротехнической стали. В пакеты закладываются короткозамкнутые металлическими пластинами обмотки 19 (пазы в сегментах 12 под обмотки заливаются расплавленным алюминием, так называемое «беличье колесо»), как в роторе асинхронного двигателя (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.5, стр.127, абзац третий).
При вариантах изготовления устройства как асинхронной электрической машины переменного тока необходимо учесть, что при взаимодействии магнитных потоков Ф короткозамкнутых обмоток сегментов 12 роторов 3 и магнитных потоков индукторов 4 статоров 2 в секторах их взаимодействия возникнет скольжение магнитных потоков.
Устройство, использующее переменный ток и работающее по принципу асинхронного электродвигателя, может быть комбинированной электрической машиной. Имея индукторы 4 статоров 2 с секторами ускорения, работающими по принципу асинхронного электродвигателя, описанными выше, и секторами торможения как электрический генератор постоянного тока. В сегменты 12 с короткозамкнутыми обмотками также монтируются обмотки электромагнитов 19, подключенные к щеткам 17, имеющимся только в секторе торможения. Угловое ускорение сегментов 12 как на осях 11, так и относительно осей роторов 3, происходит как у асинхронного электродвигателя, а их угловое торможение, как у генератора постоянного тока, который через коллекторно-щеточный механизм питает электрическим током электромагниты 19 сегментов 12. Такая конструкция схожа с конструкцией синхронной электрической машины.
Таким образом, устройство может иметь конструкцию как синхронная электрическая машина переменного тока. Как известно (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.6, стр.138, второй абзац), статор синхронной электрической машины содержит трехфазную обмотку и практически не отличается по конструкции от статора асинхронной электрической машины. Роторы синхронных электрических машин представляют собой электромагнит, различают явнополюсные и неявнополюсные роторы. Как известно (см: авторы Беспалов В.Я; Котеленец Н.Ф., Электрические машины 2006 г., издательский центр Академия, Раздел IV, Глава 12, стр.173. третий абзац), ротор синхронной явнополюсной электрической машины - это система постоянного электрического тока, поэтому его магнитопровод выполнятся как массивным, так и шихтованным (набранным из пластин из отдельных стальных листов). Ротор синхронной электрической машины имеет выступающие полюсы. Полюс - это электромагнит, состоящий из катушки и сердечника, набранного из пластин электротехнической стали. Отдельные полюса крепятся к ободу ротора с помощью хвостов, имеющих Т-образную форму или форму ласточкиного хвоста. Кроме этого, крепление полюсов осуществляется другими способами (см: Рисунки стр. Доп. Материалы). Неявнополюсный ротор синхронной электрической машины изготовляют из цельной поковки, высокопрочной легированной стали в форме цилиндра. На наружной поверхности фрезеруют прямоугольные пазы, в которые укладывают катушки обмотки возбуждения. Примерно на одной трети полюсного деления обмотку не укладывают, эта часть образует так называемый большой зубец, через который проходит основная часть магнитного потока возбуждения. Из-за больших центробежных сил, действующих на обмотку возбуждения, ее крепление в пазах производят с помощью немагнитных клиньев. Лобовые части обмотки возбуждения закрепляют роторными бандажами, а ее выводы подсоединяют к контактным кольцам.
Аналогично индуктору 4 сектора ускорения асинхронного устройства катушки 6 (секции обмоток статора) индукторов 4 в статорах 2 синхронного устройства размещаются на равных углах в пределах пространств, занимаемых секторами статора 2.
Роторы 3 устройства, как электрической машины, также представляют собой ротор синхронной электрической машины, «поделенный» на сегменты 12.
В сегментах 12 укладываются обмотки электромагнитов 19, как у устройства постоянного тока, при такой конструкции ротор 3 можно классифицировать как явнополюсный. В данном варианте устройства сплошные, как у синхронной электрической машины, коллекторные кольца 16 20 закреплены на валу 8 или колесе 10 и изолированы от них, а щеткодержатели их щеток 21 закреплены на статоре 2 или станине 1. Все обмотки электромагнитов 19 сегментов 12 соединяются на два конца проводников, подключенных на коллекторно-щеточный механизм, который подключен к постоянному току через регулируемый тиристорный выпрямитель.
В варианте ротора 3 как неявнополюсного в тела сегментов 12, изготовленных как цельные стальные детали, где в продольных пазах, выточенных в плоскостях сегментов 12, лежащих к обмотке статора 2, уложена обмотка. Пазы параллельны оси ротора 3 или осям 11.
Так как ток возбуждения в синхронных электрических машинах составляет 0,3-3% от общего, то в вариантах исполнения устройства допустимо применить возбудитель - генератор постоянного тока, ротор которого закреплен на валу 8, и статор, соосно закрепленный со статором 2, к нему или на станине 1.
Для использования в вариантах устройства неявнополюсный ротор 3 более предпочтителен, так как его конструкция способна перенести без механического повреждения большие угловые скорости ω и большие разницы величин угловых ускорений и торможений ε. Сегменты 12 роторов 3 имеют короткозамкнутые дополнительные обмотки, как у асинхронной электрической машины, для осуществления пуска, т.к. пусковой момент у синхронной электрической машины отсутствует. Кроме того, на сегменты 12 целесообразно монтировать бандаж, удерживающий их короткозамкнутые обмотки. Лобовые части бандажа будут иметь ответную форму сегменту 12 в плоскости его вращения и соединяться металлическими перемычками, лежащими на плоскостях, образующих зазоры между сегментами 12 и короткозамкнутыми стержнями (обмотками).
При пуске устройства сначала включают обмотки 6 индукторов 4 секторов ускорения и обмотки сегментов 12 роторов 3, по достижении роторами 3 заданного количества оборотов включают обмотки 6 индукторов 4 секторов торможения. В этом варианте индукторы 4 секторов ускорения будут работать в режиме двигателя, а индукторы 4 секторов торможения будут работать в режиме генератора.
Пуск устройства как трехфазной электрической машины переменного тока осуществляется подключением его обмоток 6 индукторов 4 статоров 2 к трехфазной сети переменного тока, соединение секций обмоток 6 осуществляется звездой или треугольником. Изменение направления вращения роторов 3 осуществляется переключением двух фаз обмоток 6 индукторов 4 статоров 2.
Регулирование числа оборотов роторов 3 устройства как машины переменного тока возможно изменением числа полюсов статорной обмотки 6, для чего обмотку индуктора 4 сектора статора 2 выполняют расщепленной, и подключением частей обмотки 6 меняют число пар полюсов 5. Максимальная частота вращения роторов 3 при f=50 Гц будет 3000 мин-1. Для устройства с секторами ускорения как асинхронной электрической машины данная величина будет меньше на величину скольжения.
Как известно (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 11.4, стр.237, четвертый абзац), широкое распространение получил тиристорный электропривод. На основе управляемых диодов-тиристоров промышленностью выпускается широкий спектр тиристорных преобразователей для двигателей переменного и постоянного тока. Тиристорные преобразователи имеют высокий коэффициент полезного действия, сравнительно малые размеры и массу, хорошее быстродействие и отсутствие вращающихся частей. Управление устройством в его вариантах как электрической машины постоянного и переменного тока при помощи полупроводниковой техники позволит плавно изменять частоту вращения роторов 3 без применения дорогостоящих реостатов.
Кроме вышеперечисленных вариантов устройств, для устройств малой мощности возможно их исполнение как одно- и двухфазных электрических машин переменного тока. Как известно (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.7, стр.145 третий абзац, рис.7.36), однофазные асинхронные двигатели питаются от сети однофазного тока. Обмотка статора этих двигателей может быть однофазной, двухфазной и трехфазной. Если асинхронный двигатель содержит на статоре лишь однофазную обмотку, то такая обмотка создает только пульсирующее магнитное поле с амплитудой потока Ф. Пульсирующее магнитное поле можно разложить на два вращающихся в противоположных направлениях магнитных поля с одинаковой частотой вращения и одинаковой амплитудой магнитного потока, равной его половине. Пульсирующее магнитное поле не создает пускового момента, но если искусственно раскрутить ротор, то появиться значительный вращающий момент и ротор будет вращаться. Чтобы создать пусковой момент однофазного асинхронного двигателя, обычно на статор помещают дополнительную обмотку, которая работает только во время пуска. Как правило, рабочая обмотка у двигателя занимает 2/3 пазов статора, а 1/3 пазов статора приходится на пусковую обмотку. Пусковую обмотку на период пуска замыкают либо на конденсатор, либо на резистор (чаще на конденсатор). Пусковая обмотка в пространстве смещена на 90° относительно рабочей обмотки, чем и достигается появление пускового момента. После запуска дополнительная обмотка отключается с помощью специального устройства (реле времени, реле тока и т.п.). Аналогичную конструкцию можно применить и в устройстве как в однофазной электрической машине переменного тока для обмотки индуктора 4 статора 2, разместив соответственно рабочую обмотку 6 только в секторе индуктора 4, при этом дополнительная обмотка может располагаться как в секторе индуктора 4, так и за его пределами.
Как известно (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 7.7, стр.146 третий абзац), конденсаторными двигателями называют асинхронные двигатели, имеющие две статорные обмотки. Каждая из них занимает половину пазов статора и, таким образом магнитные потоки оказываются смещенными в пространстве на 90°. Одна из обмоток замкнута на конденсатор, что позволяет получить вращающее магнитное поле и пусковой момент. Также аналогичную конструкцию можно применить и в устройстве для обмотки 6 индуктора 4 статора 2, разместив соответственно обе обмотки 6 только в секторе индуктора 4. Обе обмотки 6 индуктора 4 статора 2 будут во время работы включенными постоянно, такое устройство будет двухфазной электрической машиной переменного тока.
В вариантах изготовления устройства как электрической машины допустимо монтировать в статорах 2 индукторы 4, создающие магнитные поля постоянными магнитами, изготовленными из магнитотвердого материала. Как известно, магнитотвердые материалы будучи намагниченными сохраняют намагниченность после снятия намагничивающего поля (см: автор Бутырин П.А. и др., Электротехника 2007 г., издательский центр Академия, Глава 2.3, стр.31, последний абзац). Управление количеством оборотов n за промежуток времени в таком варианте устройства можно осуществлять, регулируя силу тока 1, протекающего в электромагнитах 19.
В других вариантах устройства как машины постоянного и переменного тока без коллекторно-щеточного механизма в сегментах 12 роторов 3 в качестве электромагнитов 19 монтируются постоянные магниты из магнитотвердого материала.
Для работы устройства в автономном режиме применяется первичный двигатель 20 (двигатель внутреннего сгорания, газовая турбина и т.п.). Первичный двигатель 20 приводит в действие электрический генератор 21, генерирующий электрический ток в соответствии с исполнением устройства как электрической машины. Устройство через органы управления потребляет электрический ток для своей работы как исполнительный механизм. В варианте устройства как гибридного агрегата валы 8 через кинематическую схему вращаются первичным двигателем 29, секторов ускорения у такого устройства нет. Сектора торможения работают в режиме генератора, сумма реакций статоров 2 для движения устройства складывается только из векторов реакций секторов торможения.
Таким образом, использование изобретения позволит создать устройство большой удельной мощности, которое во время своей работы не генерирует сильной вибрации. Для чего заявленное устройство 22 помещают внутрь авиамодели или модели судна (см. Фиг.7) и с его помощью модель используют как подвижную мишень, движение которой трудно спрогнозировать.
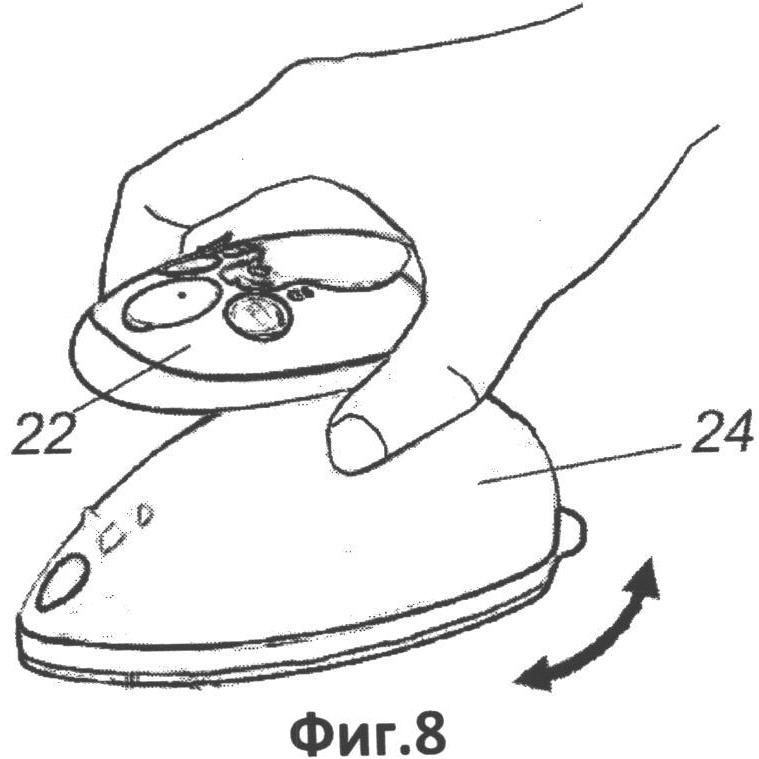
Также при помещении устройства (22) внутрь полотеров, утюгов, отпаривателей (24) (см. Фиг.8) в качестве вибратора они будут формировать самостоятельные вращательные движения, которые не ощутит потребитель вследствие малых вибраций. В результате потребителю не потребуется сильно водить рукой для вращательных движений. Для формирования случайно направленных выстрелов мячами и хоккейными шайбами при спортивных тренировках станину устройства помещают в качестве опоры для пушки, выстреливающей мяч или шайбу, в результате чего не требуется использовать сложные устройства поворота пушки по команде модуля управления, который по сути представляет собой компьютер. Это позволит сделать такие пушки более дешевыми.
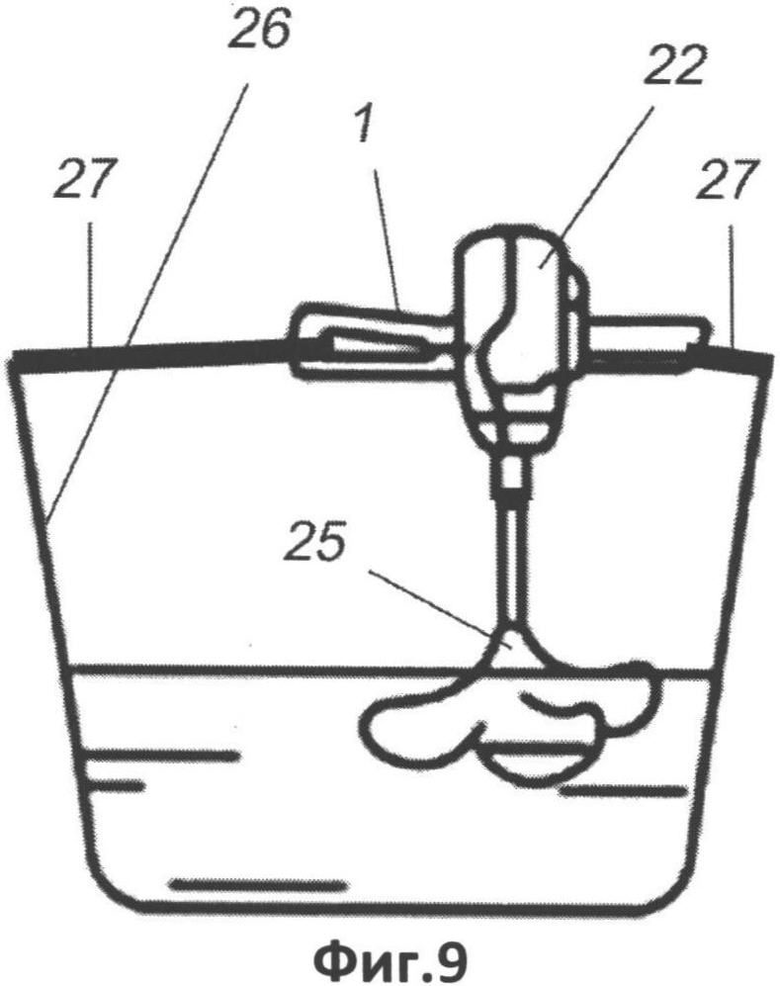
Также устройство можно использовать в качестве установок для перемешивания жидкого бетона в строительстве вместо ручных миксеров, имеющих сильные вибрации и требующих участие человека. Например (см. Фиг.9), разместив устройство (22) на ручном миксере (25) и зафиксировав с помощью жгутов (27) станину (1) устройства на ванне (26) с бетоном, оно может самостоятельно осуществлять перемешивание.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридная силовая установка | 2018 |
|
RU2671437C1 |
| КОМБИНИРОВАННЫЙ СИЛОВОЙ ЭНЕРГЕТИЧЕСКИЙ АГРЕГАТ ДЛЯ АВТОМОБИЛЯ И ТРАКТОРА С ЭЛЕКТРОТРАНСМИССИЕЙ И МОТОР-КОЛЕСАМИ (ВАРИАНТЫ) | 2001 |
|
RU2184040C1 |
| Мотор-колесо для самолета | 2018 |
|
RU2703704C1 |
| САМОРЕГУЛИРУЕМЫЙ МАГНИТОЭЛЕКТРИЧЕСКИЙ ДЕМПФЕР С РАСКРЫВАЮЩИМСЯ РОТОРОМ | 2020 |
|
RU2731825C1 |
| ГЕНЕРАТОР ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2109391C1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2008 |
|
RU2374090C1 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2009 |
|
RU2407135C2 |
| РЕВЕРСИВНАЯ ЭЛЕКТРОМЕХАНИЧЕСКАЯ ПЕРЕДАЧА | 2018 |
|
RU2671128C1 |
| Мотор-колесо для летательного аппарата | 2022 |
|
RU2784743C1 |
| Способ настройки вентильного электродвигателя | 1986 |
|
SU1467687A1 |
Изобретение относится к способам и устройствам для получения механических колебаний с использованием электрической энергии. Способ случайного смещения грузов включает в себя то, что на станине или раме закрепляют статор или группу статоров, причем корпус каждого статора, как и его внутреннее пространство делят на сектора, в которых размещают индукторы, с помощью которых производят генерирование электрического тока или магнитных полей, текущих во внутреннем пространстве своего сектора, так же во внутреннем пространстве каждого статора располагают вал ротора не менее чем с одним колесом, причем на каждом колесе закрепляют ось с сегментами, между сегментами в плоскости вращения ротора формируют равные зазоры, в которых устанавливают упругие элементы, причем сегменты выполняют с возможностью качения на своих осях, и имеющими эксцентриситет массы, точки эксцентриситета массы которых в плоскости вращения ротора лежат за окружностью, перпендикулярно которой лежат их оси, содержащие обмотки с сердечниками, которыми генерируют магнитные поля или электрический ток, и которые подключают к электрическим цепям устройства через коллекторно-щеточный механизм или постоянные магниты. Технический результат, достигаемый заявленным изобретением, заключается в создании устройства большой удельной мощности, которое во время своей работы не генерирует сильной вибрации и может быть использовано для формирования случайных смещений грузов для разных потребностей техники. 18 з.п. ф-лы, 9 ил.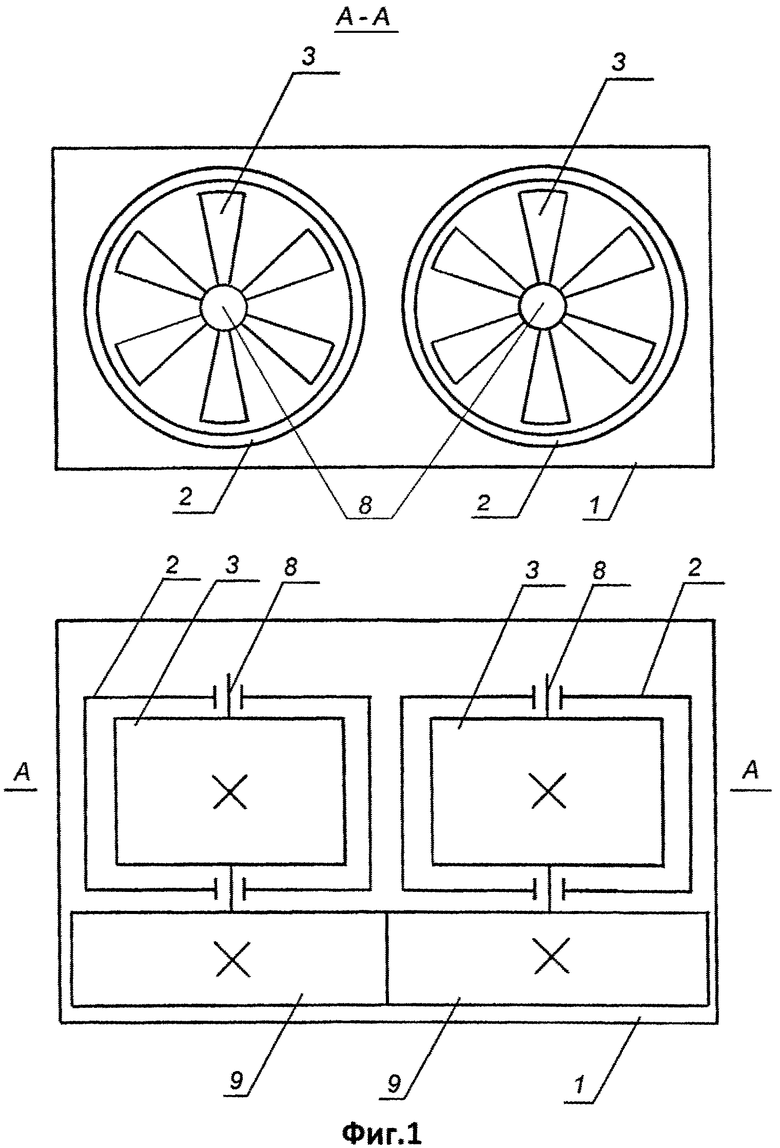
1. Способ случайного смещения грузов, характеризующийся вращением роторов с грузами, отличающийся тем, что на станине или раме закрепляют статор или группу статоров, причем корпус каждого статора, как и его внутреннее пространство, делят на секторы, в которых размещают индукторы, с помощью которых производят генерирование электрического тока или магнитных полей, текущих во внутреннем пространстве своего сектора, также во внутреннем пространстве каждого статора располагают вал ротора не менее чем с одним колесом, причем на каждом колесе закрепляют оси с сегментами, между сегментами в плоскости вращения ротора формируют равные зазоры, в которых устанавливают упругие элементы, причем сегменты выполняют с возможностью качания на своих осях и имеющими эксцентриситет массы, точки эксцентриситета массы которых в плоскости вращения ротора лежат за окружностью, перпендикулярно которой лежат их оси, содержащие обмотки с сердечниками, которыми генерируют магнитные поля или электрический ток и которые подключают к электрическим цепям устройства через коллекторно-щеточный механизм или постоянные магниты.
2. Способ по п.1, отличающийся тем, что индукторы отдельных секторов статоров независимо друг от друга выполняют как электрические машины переменного электрического тока.
3. Способ по п.1, отличающийся тем, что индукторы отдельных секторов статоров независимо друг от друга выполняют как электрические машины постоянного электрического тока.
4. Способ по п.1, отличающийся тем, что индукторы отдельных секторов статоров независимо друг от друга выполняют с постоянными магнитами.
5. Способ по п.3, отличающийся тем, что индукторы формируют с наконечниками главных полюсов, главными полюсами, катушками возбуждения и магнитопроводящей частью статора, которые помещают в секторе статора.
6. Способ по п.2, отличающийся тем, что индукторы выполняют имеющими катушки секций обмоток с парами полюсов, равномерно распределенных в секторе корпуса статора и часть корпуса статора, которую занимает индуктор.
7. Способ по п.2 или 3, отличающийся тем, что отдельные индукторы статора или группы статоров, имеющие свои отдельные электрические и магнитные цепи, объединяют в одном секторе статора или группы статоров и имеют как общие, так и раздельные электрические и магнитные цепи с другими индукторами своего или другого статора.
8. Способ по п.1, отличающийся тем, что валы выполняют с возможностью вращения на своих подшипниках или жестко закрепляют в своих опорах как оси на станине или подшипниковых щитах корпусов статоров.
9. Способ по п.1, отличающийся тем, что на каждом валу закрепляют или вращают на своих подшипниках не менее двух колес роторов, имеющих осевую симметрию относительно оси вала.
10. Способ по п.1, отличающийся тем, что на колесах роторов, на своих осях с осевой симметрией относительно оси вала, закрепляют не менее двух сегментов, которые идентичны друг другу.
11. Способ по п.1, отличающийся тем, что между сегментами одного ротора в плоскости их вращения выполняют равные зазоры, имеющие осевую симметрию относительно оси вала, где к пространству зазоров также относится пространство пазов на сегментах для упругих элементов.
12. Способ по п.11, отличающийся тем, что сегменты вместе с зазорами выполняют таким образом, что они занимают весь сектор окружности своего ротора, лежащей в плоскости его вращения, который равен 360°.
13. Способ по п.1, отличающийся тем, что в каждом сегменте закрепляют обмотку и сердечник из листов электротехнической стали или постоянный магнит из магнитотвердого материала.
14. Способ по п.1, отличающийся тем, что в электрической машине переменного тока внутри сегментов закрепляют короткозамкнутые металлические пластины-стержни.
15. Способ по п.1, отличающийся тем, что при коммутации электрических цепей обмоток сегментов одного ротора, противоположных относительно оси ротора в пары, обмотки сегментов, работающие в режиме генератора электрического тока, подпитывают электрическим током обмотки сегментов, работающие в режиме электродвигателя.
16. Способ по п.1, отличающийся тем, что коллектор устройства как машины постоянного электрического тока выполняют, как два полых цилиндра, состоящих из клинообразных пластин, с количеством пластин в каждом цилиндре, соответствующем количеству сегментов ротора, причем цилиндры коллектора закреплены на валу или колесе ротора.
17. Способ по п.1, отличающийся тем, что пары щеток или блока щеток коллекторно-щеточного механизма выполняют имеющими ответную форму цилиндрам коллектора и прислоняют к пластинам цилиндров коллектора только в своем секторе таким образом, что включаются электрические цепи независимых обмоток сегментов роторов, находящихся только в заданных секторах статора, которые при взаимодействии с индукторами независимо друг от друга могут работать в режиме и электродвигателя, и генератора электрического тока.
18. Способ по п.1, отличающийся тем, что коллектор как машины переменного тока выполняют как два полых сплошных цилиндра, цилиндры коллектора закреплены на валу или колесе ротора.
19. Способ по п.1, отличающийся тем, что при коммутировании обмоток сегментов параллельным соединением пары щеток или блока щеток коллекторно-щеточного механизма подключают к электрическому току электрические цепи всех обмоток сегментов.
| US 6700250 B2, 02.03.2004 | |||
| RU 2010115357 A, 27.10.2011 | |||
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2218652C2 |
| ГЕНЕРАТОР ЭЛЕКТРИЧЕСКОГО ТОКА, ЕГО ВАРИАНТЫ И СПОСОБЫ ИХ УСТАНОВКИ | 2009 |
|
RU2396673C1 |

