Изобретение относится к области электротехники, а именно к вентильным электродвигателям, содержащим ротор, с возбуждением от постоянных магнитов, статор с якорной обмоткой и датчик положения ротора с магнито-г чзгвствительными .элементами.
Цель изобретения - синжение трудоемкости настройки вентильного электродвигателя и повышение производительности.
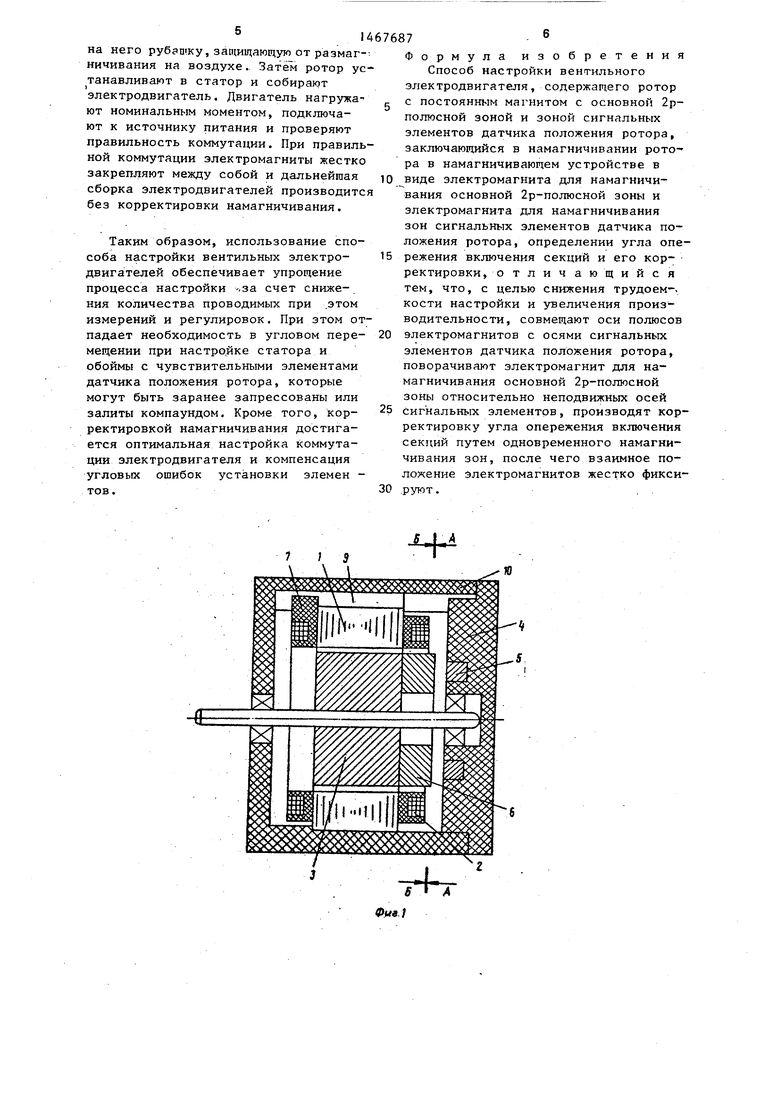
На фиг.1 показан настраиваемый вентильный электродвигатель, продольный разрез; на фиг.2 - разрез А-А на фиг.1; на. фиг.З - разрез Б-Б на
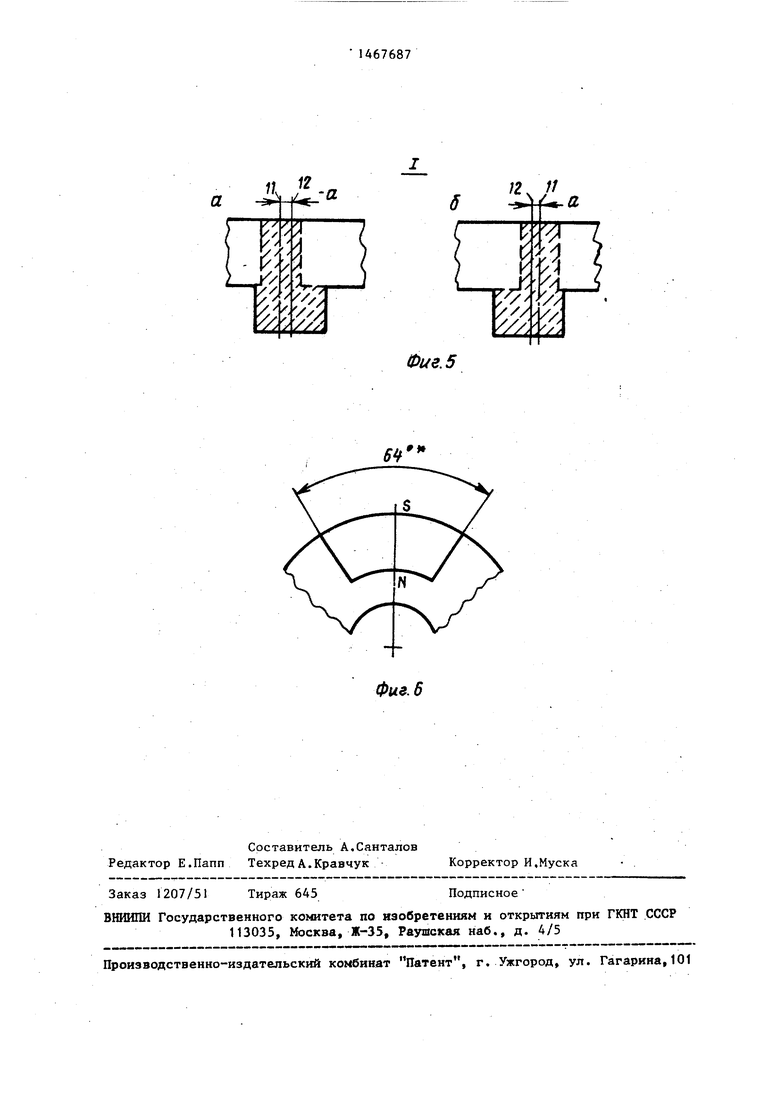
фиг.1; на.фиг.4 - развертка магнита ротора с указанием геометрических осей магнита возбуждения многополюсного электромеханического преобразо- в.ателя (ЭМП) датчика положения ротора (ДПР) в положений нейтральной коммутации; на фиг.5а,б - узел I нафкг..4 (относительное положение полюсов ДПР и ЭМП после корректировки); на фиг.6 - расположение аксиально выступающих сегментов магнитов ДПР на торцовой поверхности индуктора электрической машины. I
Вентильный электродвигатель
(фиг.1) содержит статор I с якорной
4ik
9д
Nl
OS 00
15
обмоткой 2, индуктор 3 из постоянного магнита с аксиально выступающими сегментами сигнальных элементов ДПР, обойму А с чувствительными элементами 5, аксиально выступающие сегменты образуют сигнальную зону 6 ДПР на торцовой поверхности индуктора, угловая фиксация в расположении осей полюсов которой по отношению к д индуктору производится при намагничивании ротора до сборки машины. Для обеспечения ориентации их точного взаимоположения на статоре 1 и обойме 4 ДПР выполнены ориентирующие выступы 7 и 8 соответственно и направляющий паз 9 в корпусе 10.
Намагничивание индуктора 3 и сигнальной зоны 6 датчика положения производится в представленном примере 20 в,радиальном направлении. Возможен вариант аксиального намагничивания якоря-датчика, но при этом изменит- ся конструкция обоймы 4, чувствительные элементы 5 .будут располагаться 25 со стороны наружного диаметра якоря-датчика.
При сборке, совместив ориентирующий выступ 7с пазом 9, статор I однозначно закрепляют в корпусе 10. . зо осле установки намагниченного ротора 3 в обойму 4, в которой выступ 8 предварительно совмещен с пазом 9, закрепляют на корпусе 10, например, методом сварки.
Фиксированная установка с.татора в корпус и обоймы с чувствительными элементами ДПР по отношению к корпу- су со статором и их взаимоположение руг относительно друга в. магнитном поле ротора определяются геометрической разметкой,-их центров (фиг.2 и 3). Точная разметка геометрических и электрических центров в сопряжении еталей и узлов при сборке электри- дз еской машины, жесткая угловая .фиксация в расположении осей Пи 12 (фиг.5) поля индуктора и якоря ДПР соответственно производятся в элект35
40
5
д
0 5
о
з
5
0
сборка которого произведена с высокой точнрстью;в отношении взаимоположения геометрических :и электрических центров деталей и узлов, имеет место запаздывающая коммутация, существенно ухудшающая характеристики электродвигателя. Запаздывающая ком- мутация в электродвигателе обусловлена наличием индуктивности фаз.
Постоянная времени фазы и определяет угол опережения включения фазы. Постоянная времени для серии однотипных электрических машин изменяется в узких пределах,.и оптимальный угол опережения включения составляет 4-9 эл. град. Для обеспечения работы вентильного двигателя с максимальным КПД необходимо установить оптимальный угол -опережения включения в функции частоты вращения. Обеспече- ние максимального КПД во всем диапа-г зоне изменения нагрузки и частоты вращения в реальных условиях затруднительно. Поэтому для реальных микродвигателей величина угла опережения выбирается из условия обеспечения максимального КПД при номинальном моменте нагрузки на валу при определенных значениях относительной постот янной времени и режима работы электродвигателя данной серии. Разметка геометрических и электрических центров для сопряжения деталей и узлов при сборке машины обеспечивает нейтральную коммутацию вентильного электродвигателя, при этом устанавливают среднее значение угла опережения включения между максимальным и минимальным значениями постоянной времени электродвигателя для данной серии.
Корректировку установки оптимального угла опережения включения производят в следующей последовательности.
С помощью Осциллографа измеряют угол сдвига между геометрической осью полюсов индуктора и осью поля

| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный двигатель | 1979 |
|
SU826513A1 |
| Реверсивный вентильный электродвигатель | 1985 |
|
SU1264269A1 |
| Вентильный электродвигатель | 1987 |
|
SU1460757A1 |
| Вентильный электродвигатель | 1974 |
|
SU674164A1 |
| ВЕНТИЛЬНАЯ ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2000 |
|
RU2179780C2 |
| Реверсивный вентильный электродвигатель | 1982 |
|
SU1030929A1 |
| Управляемый вентильный электродвигатель | 1988 |
|
SU1529363A2 |
| Управляемый вентильный электродвигатель | 1981 |
|
SU983924A1 |
| Вентильный электродвигатель | 1989 |
|
SU1720129A1 |
| Управляемый вентильный электродвигатель | 1985 |
|
SU1259463A1 |

Изобретение относится к электротехнике, а именно к вентильным электродвигателям. Целью изобретения является снижение трудоемкости настройки и увеличение производительности. Изобретение позволяет с высокой точностью осуществлять опережение включения ключей коммутатора вентильного электродвигателя путем смещения магнитной оси полюса возбуждения относительно магнитной оси сигнального элемента датчика положения ротора для правого или левого направления вращения. Сигнальные элементы датчика положения ротора выполняются совместно с полюсами возбуждения, а статор с якорной обмоткой и статор с чувствительными элементами жестко фи- фиксируются -в продольном пазу корпуса в положение нулевого угла опережения включения ключей коммутатора. В зависимости от постоянной времени якорной обмотки электродвигателя производят угловую корректировку в расположении магнитных осей полюсов возбуждения по отношению к магнитным осям сигнальных элементов. 6 ил. « С/)
ромагните при намагничивании до сбор-сп сигнального элемента ДПР при номнки электрической машины. Такой способ сборки электрической машины позволяет обеспечить нейтральную коммутацию секций якорной обмотки электродвигателя без дополнительного поворо-. та обоймы с чувствитепьньми элементами относительно статора (фиг,4).Независимо от направления вращения при включении электродвигателя.
55
нальной нагрузке на валу и соотве ствующем режиме работы. По измерен му углу опережения производят сдви электромагнита для намагничивания и дуктора многополюсной машины относи тельно неподвижно закрепленного электромагнита для намагничивания ДПР и жестко их фиксируют между со бой. Намагничивают ротор, надевают
5
нальной нагрузке на валу и соответствующем режиме работы. По измеренному углу опережения производят сдвиг электромагнита для намагничивания индуктора многополюсной машины относительно неподвижно закрепленного электромагнита для намагничивания ДПР и жестко их фиксируют между собой. Намагничивают ротор, надевают
на него рубашку, защищающую от paзмагничивания на воздухе. Затё ротор ус танавливают в статор и собирают электродвигатель. Двигатель нагружают номинальным моментом, подключают к источнику питания и проверяют правильность коммутации. При правильной коммутации электромагниты жестко закрепляют между собой и дальнейшая сборка электродвигателей производитс без корректировки намагничивания.
Таким образом, использование способа настройки вентильных электродвигателей обеспечивает упрощение процесса настройки -.за счет снижения количества проводимых при .этом измерений и регулировок. При этом отпадает необходимость в угловом перемещении при настройке статора и обоймы с чувствительными элементами датчика положения ротора, которые могут быть заранее запрессованы или залиты компаундом. Кроме того, корректировкой намагничивания достигается оптимальная настройка коммутации электродвигателя и компенсация угловых ошибок установки элемен - тов.
Формула изобретения
Способ настройки вентильного электродвигателя, содержащего ротор с постоянным магнитом с основной 2р- полюсной зоной и зоной сигнальных элементов датчика положения ротора, заключающийся в намагничивании ротора в намагничивающем устройстве в
виде электромагнита для намагничивания основной 2р-полюсной зоны и электромагнита для намагничивания зон сигнальных элементов датчика положения ротора, определении угла опережения включения секций и его корректировки, отличающийся тем, что, с целью снижения трудоем-. кости настройки и увеличения производительности, совмещают оси полюсов
электромагнитов с осями сигнальньк элементов датчика положения ротора, поворачивают электромагнит для намагничивания основной 2р-полюсной зоны относительно неподвижных осей
сигнальных элементов, производят корректировку угла опережения включения секций путем одновременного намагничивания зон, после чего взаимное положение электромагнитов жестко фикси.руют.
Ю
Фие.д
Фиа.
Составитель А.Санталов Редактор Е.Папп Техред А.Кравчук
Заказ 1207/51
Тираж 645
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина,101
Фиг. 5
Фие. 6
Корректор И,Муска
Подписное
| СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ОПУХОЛЕЙ ЛИЦЕВОГО СКЕЛЕТА | 1998 |
|
RU2146893C1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ настройки коммутации вентильного электродвигателя | 1975 |
|
SU577615A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
