Изобретение относится к области вооружений, а именно к многоствольным гранатометам (пусковым установкам) для объектов военной техники.
Известен наиболее близко совпадающий по совокупности признаков и по конструкции с заявляемым изобретением многоствольный гранатомет (RU 2400689 C1, F41F 3/042 2006.01), взятый в качестве прототипа.
Многоствольный гранатомет содержит основание, поворотную опору с блоком стволов, установленную на основании через опорное устройство с возможностью поворота относительно вертикальной оси, привод опоры, содержащий самотормозящуюся червячную передачу, коренную шестерню, находящуюся в зацеплении с зубчатым ободом, выполненным на поворотной опоре, причем червячное колесо и коренная шестерня установлены на одном валу, а между основанием и поворотной опорой в постоянной связи с ними установлен датчик угла поворота, расположенный на корпусе привода, соединенном с основанием, и выполнен в виде переменного резистора, на оси подвижной системы которого установлена шестерня датчика, находящаяся в постоянном зацеплении с шестерней центральной, жестко соединенной с поворотной опорой соосно с ее вертикальной осью.
Недостатком прототипа является отсутствие унификации гранатометов при установке на объект, в связи с различными показаниями датчика угла поворота различных гранатометов при одинаковых фиксированных положениях на объекте.
Это следствие того, что, в фиксированном положении блока стволов гранатомета, конструктивно невозможно настроить на заданные показания переменный резистор датчика из-за постоянного зубчатого зацепления жестко зафиксированной шестерни центральной и шестерни датчика, жестко посаженной на подвижной системе датчика. Отсутствие унификации гранатометов приводит к усложнению системы управления, а именно к необходимости ее настройки, к введению индивидуальных угловых поправочных коэффициентов для каждого гранатомета, причем они могут бесконтрольно изменяться при каждой разборке-сборке основания.
Предлагаемым изобретением решаются задачи: унификация гранатометов по показанию переменного резистора датчика в фиксированном положении блока стволов, упрощение системы управления, улучшение собираемости и ремонтопригодности МГ и, как следствие, улучшение и упрощение эксплуатации.
Технический результат, на достижение которого направлено изобретение, заключается в создании многоствольного гранатомета:
- с механизмом настройки датчика, который обеспечивает заданные одинаковые показания переменного резистора датчика в фиксированном положении блока стволов для всех гранатометов и настраивается один раз на стадии изготовления с достаточной точностью. Это позволяет упростить систему управления объекта, за счет того что исключается введение индивидуальных для каждого гранатомета поправочных угловых коэффициентов, и с достаточной точностью определять положение блока стволов при вращении поворотной опоры, что приводит к повышению точности отстрела боеприпасов;
- с однозначной и удобной собираемостью гранатомета по двум зубчатым соединениям, а именно коренная шестерня попадает в зацепление с зубчатым ободом поворотной опоры, а шестерня датчика однозначно попадает в зацепление с шестерней центральной при фиксированном положении подвижной системы датчика и поворотной опоры.
Указанный технический результат достигается тем, что в многоствольном гранатомете, содержащем основание, поворотную опору с блоком стволов, установленную на основании через опорное устройство с возможностью поворота относительно вертикальной оси, привод опоры, содержащий самотормозящуюся червячную передачу, коренную шестерню, находящуюся в зацеплении с зубчатым ободом, выполненным на поворотной опоре, причем червячное колесо и коренная шестерня установлены на одном валу, а между основанием и поворотной опорой в постоянной связи с ними установлен датчик угла поворота, расположенный на корпусе привода, соединенном с основанием, и выполнен в виде переменного резистора, на оси подвижной системы которого установлена шестерня датчика, находящаяся в постоянном зацеплении с шестерней центральной, жестко соединенной с поворотной опорой соосно с ее вертикальной осью, новым является то, что шестерня центральная имеет положение регулирования, при котором она имеет возможность вращаться относительно поворотной опоры, а в основании, корпусе привода и в шестерне датчика выполнено отверстие, в которое, в положении регулирования шестерни центральной, при заданном показании датчика устанавливается фиксатор, извлекаемый при жестком закреплении центральной шестерни, причем отверстие для фиксатора соосно и является продолжением отверстия, в которое устанавливается болт, соединяющий основание и корпус привода, а на поворотной опоре и на основании выполнены риски, совпадающие в положении жесткого закрепления шестерни центральной и шестерни датчика, а на червячном валу выполнен хвостовик для взаимодействия с рукояткой ручного привода, вставляемой снаружи основания.
Выполнение в конструкции у шестерни центральной положения регулирования, при котором она имеет возможность вращаться относительно поворотной опоры, причем с возможностью обеспечения этого вращения извне основания, позволяет при первоначальной сборке без затруднений найти положение, при котором могут быть совмещены два зубчатых соединения: коренной шестерни с зубчатым ободом поворотной опоры и шестерни датчика с шестерней центральной.
Выполнение в основании, корпусе привода и в шестерне датчика отверстия, в которое, в положении регулирования шестерни центральной, при заданном показании датчика, устанавливается фиксатор, позволяет зафиксировать шестерню датчика при заданном показании переменного резистора, затем при жестком закреплении центральной шестерни извлекать фиксатор и устанавливать болт, соединяющий основание и корпус привода.
Выполнение на поворотной опоре и на основании рисок, совпадающих в положении жесткого закрепления шестерни центральной и шестерни датчика, позволяет однозначно, с достаточной степенью точности, жестко связать заданные показания датчика и заданное фиксированное положение блока стволов относительно основания, а следовательно, и относительно объекта.
Выполнение на червячном валу хвостовика для взаимодействия с рукояткой ручного привода, вставляемой снаружи основания, позволяет вручную с большим передаточным отношением и, следовательно, с достаточной точностью и без значительных усилий поворачивать на нужный угол блок стволов с поворотной опорой относительно основания. Это необходимо, в частности, для точности настройки датчика и для совмещения рисок на поворотной опоре и на основании.
Технические решения с признаками, отличающими заявляемое решение от прототипа, не известны и явным образом из уровня техники не следуют. Это позволяет считать, что заявляемое решение является «новым» и обладает «изобретательским уровнем».
Сущность изобретения поясняется чертежами, где изображены:
фиг.1 - многоствольный гранатомет,
на фиг.2 - вид слева,
на фиг.3 - вид сверху,
на фиг.4 - разрез Б-Б. Стопор установлен,
на фиг.5 - разрез Б-Б. Стопор снят,
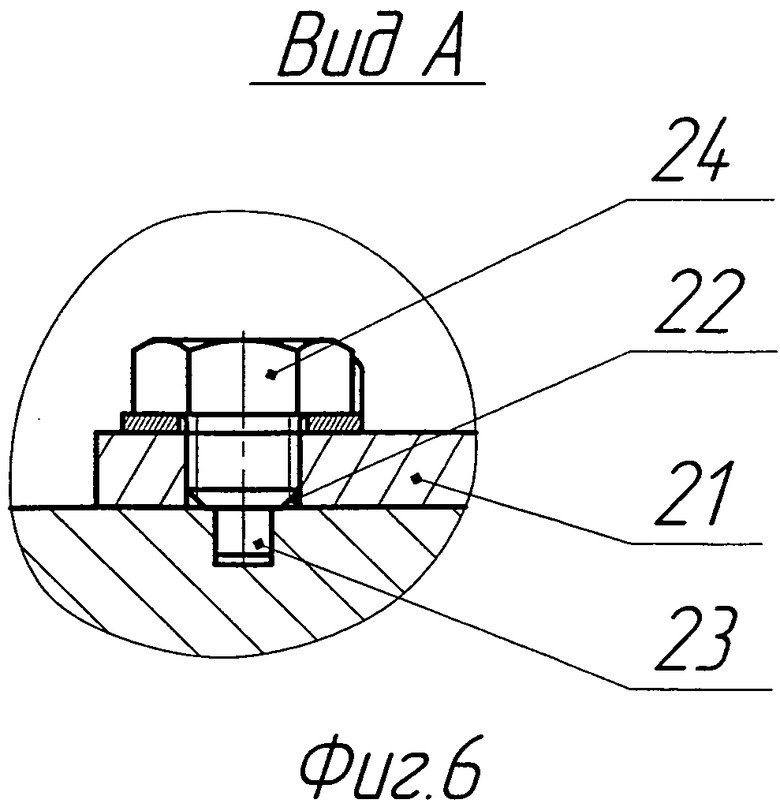
на фиг.6 - вид А.
Многоствольный гранатомет содержит основание 1, привод с коренной шестерней 2 и самотормозящей червячной передачей (червячным валом 3 и червячной шестерней), поворотную опору 4 с блоком стволов 5, установленную на основании с возможностью поворота относительно центральной вертикальной оси 6. На корпусе привода 7, неподвижно закрепленном в основании болтами 8 и 9, установлен датчик угла поворота 10 - переменный резистор, на оси подвижной системы которого установлена шестерня датчика 11, находящаяся в постоянном зацеплении с шестерней центральной 12, соосно закрепленной на поворотной опоре с временной (на стадии сборки) возможностью вращения относительно центральной вертикальной оси 6. Отверстия под болт 9 выполнены так, чтобы не нарушалась прочность крепления и прочность корпуса привода, а сквозное соосное отверстие 13 находилось в зоне диаметра шестерни датчика. На шестерне датчика 11 выполнено отверстие 14, соосное с отверстием 13. Отверстие 14 выполнено так, чтобы резистивный датчик показывал заданное значение сопротивления R0, соответствующее заданному положению опоры с блоком стволов. На поворотной опоре выполнена риска 15, показывающая направление стволов в горизонтальной плоскости, а на основании выполнена риска 16, показывающая направление заданного положения опоры с блоком стволов. На червячном валу выполнен хвостовик 17 для взаимодействия с ручным приводом 18 через отверстие 19, закрывающееся заглушкой 20 в условиях, когда ручной привод не применяется.
В процессе первичной сборки шестерня центральная 12 заневоливается скобой 21, которая имеет резьбовое отверстие 22, через которое в опоре выполняется отверстие 23, через которое шестерня центральная окончательно закрепляется стопорным болтом 24. Шестерня датчика 11 временно закрепляется (в положении датчика R0) через отверстия 13 и 14 стопором 25 с диаметрами по отверстиям 13 и 14, заневоленным болтом 9.
При первичной сборке для настройки датчика необходимо чтобы привод был закреплен на основании болтами 8 и 9 со вставленным стопором 25, который временно закрепляет шестерню датчика в положении датчика R0. Шестерня центральная, установленная в центре на поворотной опоре, должна быть не закреплена от вращения вокруг центральной оси. В процессе постановки опоры на основание коренная шестерня привода входит в зацепление с зубчатым ободом опоры поворотной. Путем внешнего воздействия находится положение временно незакрепленной от поворота шестерни центральной, при котором она входит в зацепление с временно заневоленной шестерней датчика, и опора окончательно устанавливается по двум зубчатым соединениям. С помощью ручного привода, взаимодействующего с червячным валом за хвостовик, выводится заданное положение поворотной опоры по совпадению рисок 15 и 16. Шестерня центральная заневоливается скобой 21, которая имеет резьбовое отверстие 22, через которое в опоре выполняется отверстие 23, через которое шестерня центральная окончательно закрепляется стопорным болтом 24. Стопор 25 извлекается через отверстие болта 9, таким образом, снимая стопорение находящихся в зацеплении шестерни датчика и шестерни центральной.
Настройка датчика выполнена.
При разборке МГ (например, для ремонта или для плановой замены резиновых колец) для сборки опоры с сохранением настройки датчика необходимо, чтобы привод был закреплен на основании болтами 8 и 9 со вставленным стопором 25, который временно закрепляет шестерню датчика в положении датчика R0. Необходимо собрать поворотную опору, совместив сначала зубчатое соединение коренной шестерни с зубчатым ободом поворотной опоры, затем откорректировать заданное положение поворотной опоры с помощью ручного привода по совмещению рисок 15, 16. Окончательно опуская поворотную опору, войти в зацепление закрепленной на опоре шестерни центральной и временно закрепленной шестерни датчика. Это зацепление должно совпадать, таким образом, определенно и однозначно собирая поворотную опору по двум зубчатым соединениям. Стопор 25 извлекается через отверстие болта 9, таким образом, снимается стопорение находящихся в зацеплении шестерни датчика и шестерни центральной.
Сборка с сохранением настройки датчика выполнена.
В соответствии с данным описанием и формулой на предлагаемое изобретение «Многоствольный гранатомет» разработана рабочая конструкторская документация, изготовлены и испытаны стрельбой экспериментальные и опытные образцы многоствольного гранатомета. Результаты положительные, подтверждены Актами испытаний. В настоящее время изготавливаются опытные образцы для проведения испытаний на последующих этапах.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОСТВОЛЬНЫЙ ГРАНАТОМЕТ | 2009 |
|
RU2400689C1 |
| МНОГОСТВОЛЬНЫЙ ГРАНАТОМЕТ | 2013 |
|
RU2533935C1 |
| МНОГОСТВОЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2014 |
|
RU2558784C1 |
| ПУСКОВАЯ УСТАНОВКА | 2013 |
|
RU2542687C1 |
| МНОГОСТВОЛЬНЫЙ ГРАНАТОМЁТ | 2015 |
|
RU2594311C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ | 2006 |
|
RU2318174C1 |
| ПРИВОД ПОВОРОТА | 2007 |
|
RU2328442C1 |
| ПОВОРОТНАЯ ПУСКОВАЯ УСТАНОВКА | 2014 |
|
RU2579604C1 |
| УСТРОЙСТВО ДЛЯ ЗАПУСКА ГРАНАТ | 2013 |
|
RU2542688C1 |
| ПОВОРОТНАЯ ПУСКОВАЯ УСТАНОВКА | 2007 |
|
RU2357180C1 |
Изобретение относится к вооружению и может быть использовано в многоствольных гранатометах. Многоствольный гранатомет (МГ) содержит основание с отверстием, рисками, опорным устройством и поворотной опорой с блоком стволов и рисками, привод опоры с самотормозящейся червячной передачей, коренную шестерню в зацеплении с зубчатым ободом на поворотной опоре, вал с хвостовиком для червячного колеса и коренной шестерни, датчик угла поворота в виде переменного резистора на корпусе привода и с шестерней с отверстием, регулируемую вращающуюся шестерню центральную, фиксатор с соосным отверстием для болта. Изобретение позволяет упростить управление, сборку и эксплуатацию МГ. 3 з.п. ф-лы, 6 ил.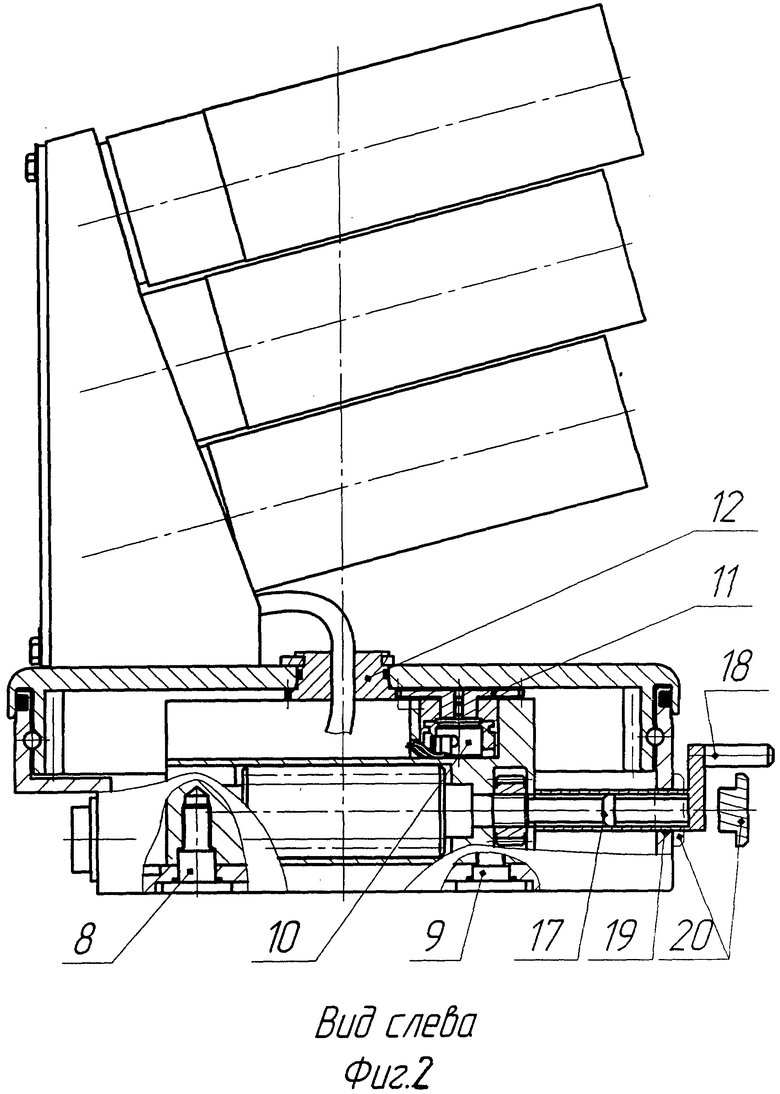
1. Многоствольный гранатомёт, содержащий основание, поворотную опору с блоком стволов, установленную на основании через опорное устройство с возможностью поворота относительно вертикальной оси, привод опоры, содержащий самотормозящуюся червячную передачу, коренную шестерню, находящуюся в зацеплении с зубчатым ободом, выполненным на поворотной опоре, причем червячное колесо и коренная шестерня установлены на одном валу, а между основанием и поворотной опорой в постоянной связи с ними установлен датчик угла поворота, расположенный на корпусе привода, соединенном с основанием, и выполнен в виде переменного резистора, на оси подвижной системы которого установлена шестерня датчика, находящаяся в постоянном зацеплении с шестерней центральной, жестко соединенной с поворотной опорой соосно с ее вертикальной осью, отличающийся тем, что шестерня центральная имеет положение регулирования, при котором она имеет возможность вращаться относительно поворотной опоры, а в основании, корпусе привода и в шестерне датчика выполнено отверстие, в которое в положении регулирования шестерни центральной, при заданном показании датчика устанавливается фиксатор, извлекаемый при жестком закреплении центральной шестерни.
2. Многоствольный гранатомёт по п.1, отличающийся тем, что отверстие для фиксатора соосно и является продолжением отверстия, в которое устанавливается болт, соединяющий основание и корпус привода.
3. Многоствольный гранатомёт по п.1, отличающийся тем, что на поворотной опоре и на основании выполнены риски, совпадающие в положении жесткого закрепления шестерни центральной и шестерни датчика.
4. Многоствольный гранатомёт по п.1, отличающийся тем, что на червячном валу выполнен хвостовик для взаимодействия с рукояткой ручного привода, вставляемой снаружи основания.
| МНОГОСТВОЛЬНЫЙ ГРАНАТОМЕТ | 2009 |
|
RU2400689C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ ОРУЖИЯ ТИПА ТОРПЕДЫ | 2006 |
|
RU2318174C1 |
| CN 201535344 U, 28.07.2010 | |||
| CN 101672346 A, 17.03.2010 | |||

