Настоящее изобретение относится к приспособлению для опускания или последующего извлечения трубопроводного конца, содержащего соединительную часть, выполненную с возможностью «горизонтальной» стыковки и соединения с первой соединительной частью на морском дне, причем приспособление выполнено с возможностью повторной доставки на поверхность для повторного использования.
В частности, приспособление разработано для размещения на морском дне соединительных устройств, имеющих тип, описанный в норвежской патентной заявке NO 2009 3107 с заявителем и изобретателем, аналогичными настоящей заявке. Настоящим приведена ссылка на эту патентную заявку.
В данном контексте «соединительное устройство для горизонтального соединения» означает, что соединительные части состыкованы в основном в горизонтальном направлении.
В подводных конструкциях, например манифольдах и вентильных конструкциях, которые расположены на морском дне, трубопровод часто содержит по меньшей мере одну трубу, которая заканчивается открытыми трубными переводниками, или поверхностями, формирующими место соединения. Каждое место соединения содержит неподвижную соединительную часть. "Неподвижная" в этом контексте означает по отношению к подводной конструкции. Место соединения позже используют для подсоединения к внешней трубе.
Известны два принципа работы соединительных устройств вертикальный или горизонтальный. Для соединительного устройства для горизонтального соединения место соединения выступает из конструкции горизонтально. В Северном море это техническое решение получило доминирующее применение. В других акваториях, например в Мексиканском заливе, более распространено вертикальное решение.
Один из примеров вертикального соединительного устройства приведен в заявке NO 2009 2880.
Следует упомянуть, что в принципе известны три (или фактически два) различных типа внешних соединений для подводных конструкций:
- Прямое соединение между двумя конструкциями. В этом случае обычно используют жесткую трубу, имеющую на каждом конце подвижную соединительную часть. Обычно ее именуют перемычкой. Перемычку изготавливают на основании замеров относительного расположения двух точек контакта.
- Соединение между концом трубопровода (жесткой трубой) и конструкцией. Почти невозможно (по меньшей мере очень трудно) соединить жесткий трубопровод прямо с конструкцией, ранее установленной на морском дне. Поэтому между трубопроводом и конструкцией вставляют промежуточную часть трубы, часто именующуюся "катушка". Чтобы обеспечить возможность соединить катушку с трубопроводом, прямо к трубопроводу приваривают небольшую конструкцию, содержащую место соединения. Катушка в принципе походит на перемычку, описанную выше.
- Прямое подсоединение к конструкции гибкого трубопровода, или составного шланга. В некоторых случаях этот вариант выбирают, чтобы использовать так называемые гибкие шланги вместо твердых стальных труб. Такие трубопроводы можно сравнить с большим садовым шлангом. В этом случае нет необходимости в использовании катушки или перемычки между концом такой трубы и указанной конструкцией. Труба выполнена настолько гибкой, что можно использовать подвижную соединительную часть непосредственно на конце трубы и соединить ее напрямую с неподвижной соединительной частью на указанной конструкции. Тогда нет необходимости производить точные замеры положения места соединения на указанной конструкции.
Именно с принципами последнего соединения связано предлагаемое изобретение.
Приспособление содержит несколько основных компонентов и в одном из примеров реализации выполнено таким образом, что каждый из основных компонентов выполнен в виде заменяемого модуля. Приспособление может быть использовано для размещения первого и второго концов гибкого трубопровода, однако после внесения в приспособление некоторых изменений. Задачи, которые должны быть решены, могут быть несколько отличны от случая, в котором первый конец необходимо уложить с надводного корабля к морскому дну, в отличие от развертывания второго конца.
Согласно настоящему изобретению предложено приспособление вышеуказанного типа, отличающееся тем, что содержит центральную подъемную раму, направляющую часть, образующую продолжение подъемной рамы, и подъемную скобу, причем приспособление содержит захватные средства, выполненные с возможностью, в одной ситуации, приведения в действие для частичного охватывания и удержания трубопроводного конца и, в другой ситуации, с возможностью высвобождения трубопроводного конца из подъемной рамы.
В одном из примеров реализации захватные средства выполнены с возможностью высвобождения из трубопроводного конца путем приведения в действие (посредством устройства с дистанционным управлением) приводящих средств, предпочтительно доступных сверху.
Предпочтительно каждое из захватных средств содержит зажимный кулачок, прикрепленный с возможностью поворота к подъемной раме и испытывающий влияние приводящих средств, оказывающих воздействие на скошенную поверхность зажимного кулачка для обеспечения его поворота.
В одном из примеров реализации приспособление собрано из модулей, содержащих модуль центральной подъемной рамы, один управляющий модуль, выполненный с возможностью высвобождения из модуля подъемной рамы и образующий его продолжение, и модуль подъемной скобы, выполненный с возможностью высвобождения из модуля подъемной рамы, причем модуль подъемной рамы содержит захватные средства.
Управляющий модуль может быть выполнен с возможностью высвобождения из модуля подъемной рамы посредством быстроразъемных средств, таких как крюк, крепежный штифт или шпонка.
Модуль подъемной скобы может быть выполнен с возможностью высвобождения из модуля подъемной рамы посредством быстроразъемных средств, таких как крепежный штифт, карабин или шпонка.
Следует отметить, что приспособление, в частности, выполнено с возможностью управления соединительным устройством, содержащим:
первую соединительную часть, удерживающую первый конец первого трубопровода, причем первая соединительная часть и первый трубопровод выполнены с возможностью предварительного опускания и размещения на морском дне, а первая соединительная часть содержит направляющую конструкцию, расположенную на расстоянии от указанного конца трубы,
вторую погружаемую соединительную часть, удерживающую второй конец второго трубопровода, причем вторая соединительная часть и второй трубопровод выполнены с возможностью опускания с поверхности к первой соединительной части, а вторая соединительная часть содержит управляющий модуль, расположенный на расстоянии от указанного конца трубы, и
соединитель, расположенный между соединительными частями для окончательного соединения между собой указанных концов труб.
Соответственно, управляющий модуль выполнен с возможностью ответного взаимодействия с направляющей конструкцией в процессе опускания второй соединительной части и поворота второй соединительной части для предварительного выравнивания конца второй трубы по направлению к концу первой трубы, так что обеспечена возможность выравнивания первого и второго трубопроводов друг с другом на морском дне, при этом первая соединительная часть содержит смежную наклонную конструкцию, имеющую упорные поверхности и направляющие средства, выполненные с возможностью взаимодействия с ответными поверхностями и средствами на второй соединительной части при перемещении второй соединительной части к первой соединительной части для точного выравнивания указанных концов труб.
Смежная наклонная конструкция физически отделена от первой соединительной части, так что обеспечена возможность оставления второй соединительной части на наклонной конструкции после операции разъединения между соединительными частями, причем конструкция, частью которой является первая соединительная часть, выполнена с возможностью извлечения на поверхность при необходимости, в то время как другие соединительные части остаются в соответствующих наклонных конструкциях на морском дне.
Направляющие средства наклонной конструкции могут иметь выступающую пластину, а ответные средства второй соединительной части содержат паз, причем выступающая пластина и указанный паз выполнены с возможностью приведения в зацепление друг с другом при приближении концов труб друг к другу с предотвращением возможного наклонного движения второй соединительной части.
Упорные поверхности наклонной конструкции могут иметь наклонные поверхности, на которые воздействуют ответные поверхности второй соединительной части для обеспечения точного выравнивания между концами труб при продвижении второй соединительной части к первой соединительной части.
Направляющая конструкция может представлять собой проходящую вверх рамную конструкцию, выполненную с возможностью приема соответствующего управляющего модуля, расположенного на второй соединительной части.
Управляющий модуль второй соединительной части может содержать выступающую дугообразную конструкцию, выполненную с возможностью ответного подвижного взаимодействия в начальной фазе с проходящей вверх рамной конструкцией первой соединительной части, а при полном ведении дугообразной конструкции в часть проходящей вверх рамной конструкции до самого нижнего участка этой части обеспечена возможность поворота второй соединительной части до упора в наклонную конструкцию и предварительного выравнивания концов труб относительно друг друга.
Первая соединительная часть может иметь по меньшей мере один направляющий штифт, а вторая соединительная часть может соответственно содержать по меньшей мере ответную приемную часть, которые совместно образуют дополнительные направляющие средства.
Соединитель может быть выполнен заодно с соединительным устройством и закреплен на второй соединительной части, которая выполнена с возможностью смещения в направлении к первой соединительной части и от нее, причем концы труб таким образом оказываются размещены перед их завершающим соединением.
Дополнительные задачи, особенности и преимущества настоящего изобретения будут следовать из представленного далее описания предпочтительных примеров реализации настоящего изобретения, приведенных для пояснения на основании приложенных чертежей.
На фиг.1 показан перспективный вид приспособления согласно настоящему изобретению.
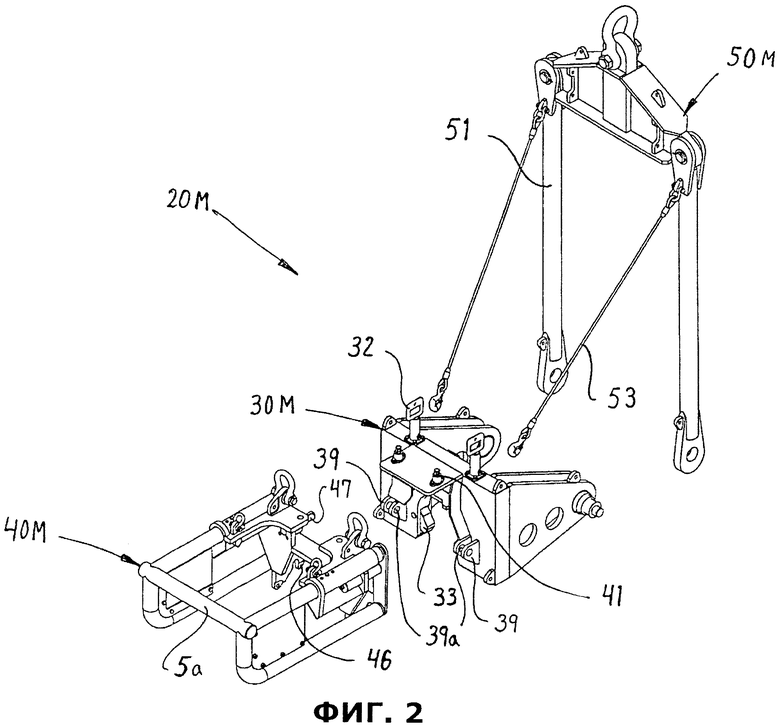
На фиг.2 показан перспективный вид приспособления согласно настоящему изобретению, на котором индивидуальные основные компоненты отделены друг от друга и формируют модули.
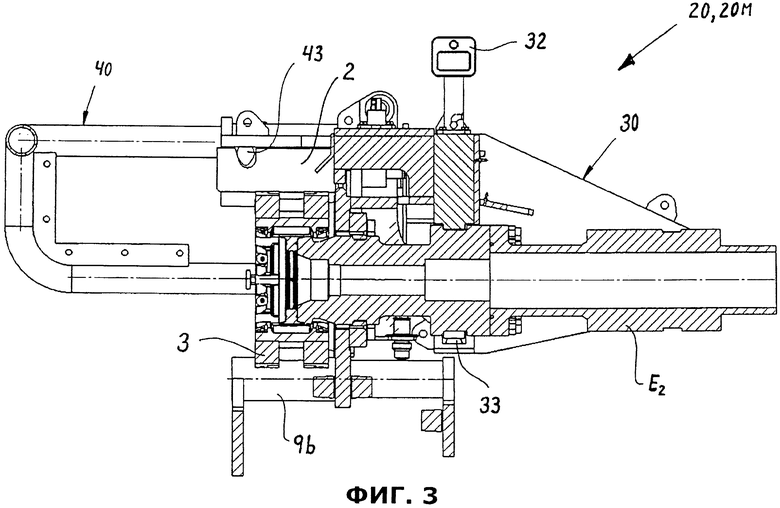
На фиг.3 показан вертикальный вид с частичным разрезом приспособления и соединительной части, удерживаемой приспособлением.
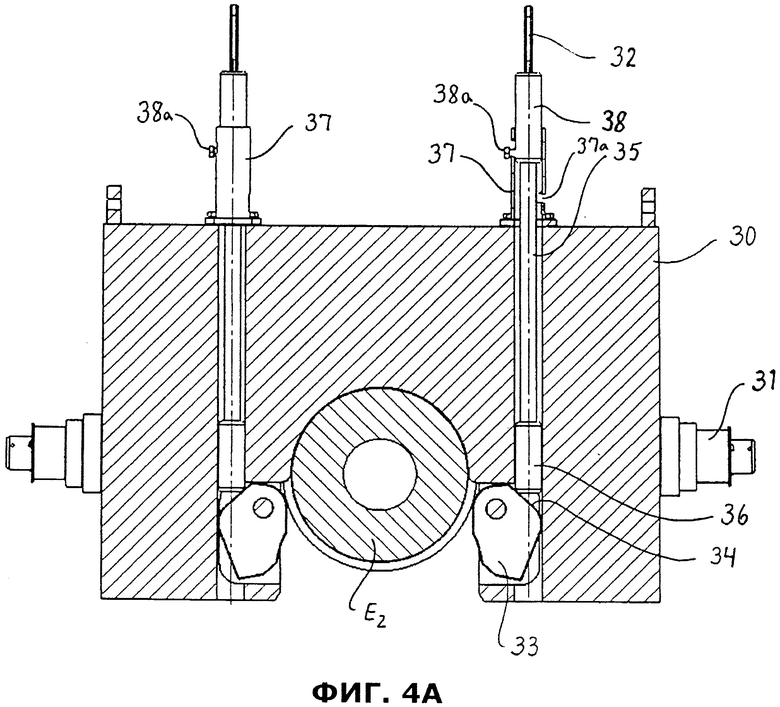
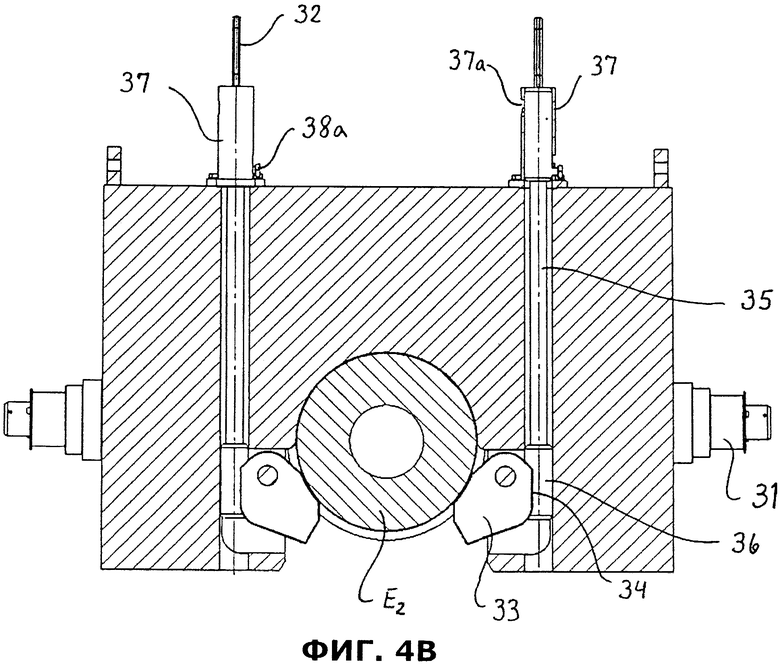
На фиг.4A и 4B показано поперечное сечение приспособления через модуль подъемной рамы и соответствующие захватные средства соответственно в открытом и закрытом положениях.
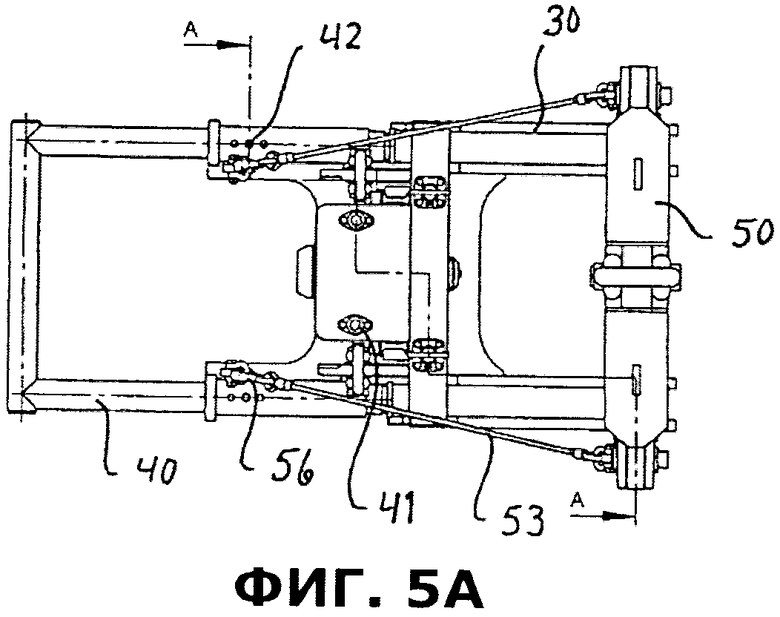
На фиг.5A показаны вид сверху приспособления и линия поперечного сечения A-A (не прямолинейного) по фиг.5B.
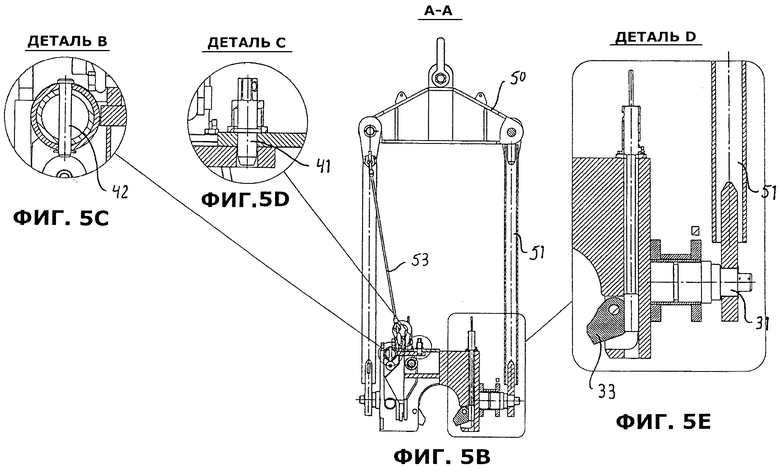
На фиг.5B показано поперечное сечение вдоль линии А-А (не прямолинейной) по фиг.5А.
На фиг.5C показан фрагмент В по фиг.5В, выделенный кругом.
На фиг.5D показан фрагмент С по фиг.5В, выделенный кругом.
На фиг.5E показан фрагмент D по фиг.5В, выделенный кругом.
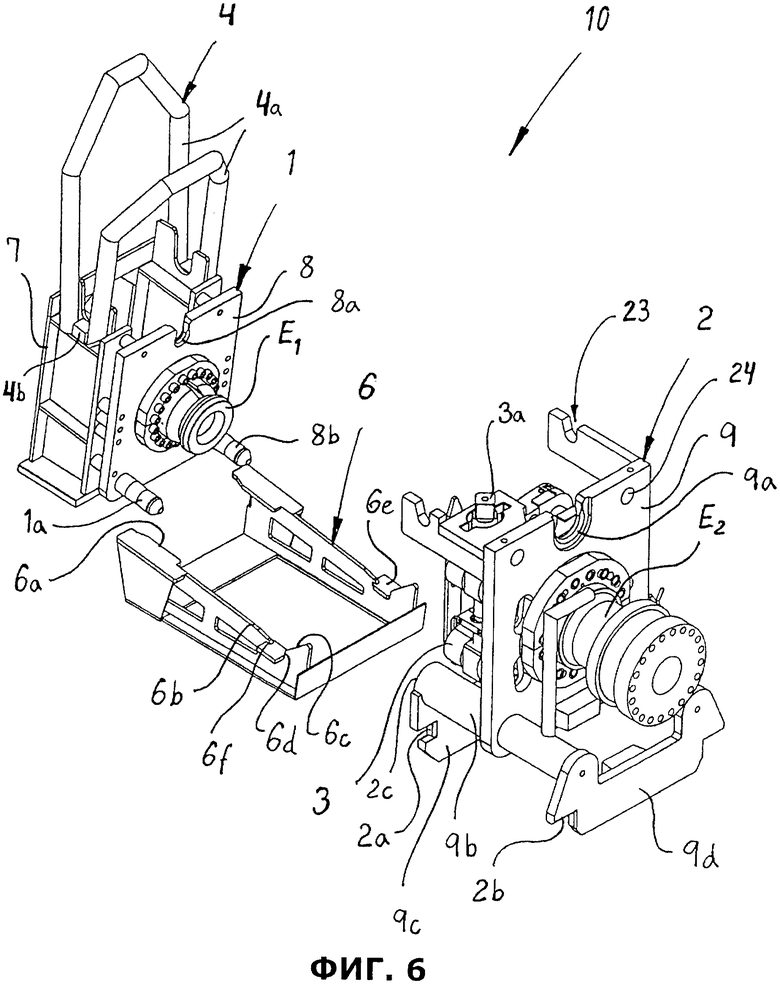
На фиг.6 показан перспективный вид соединительного устройства без приспособления и его части в разобранном виде.
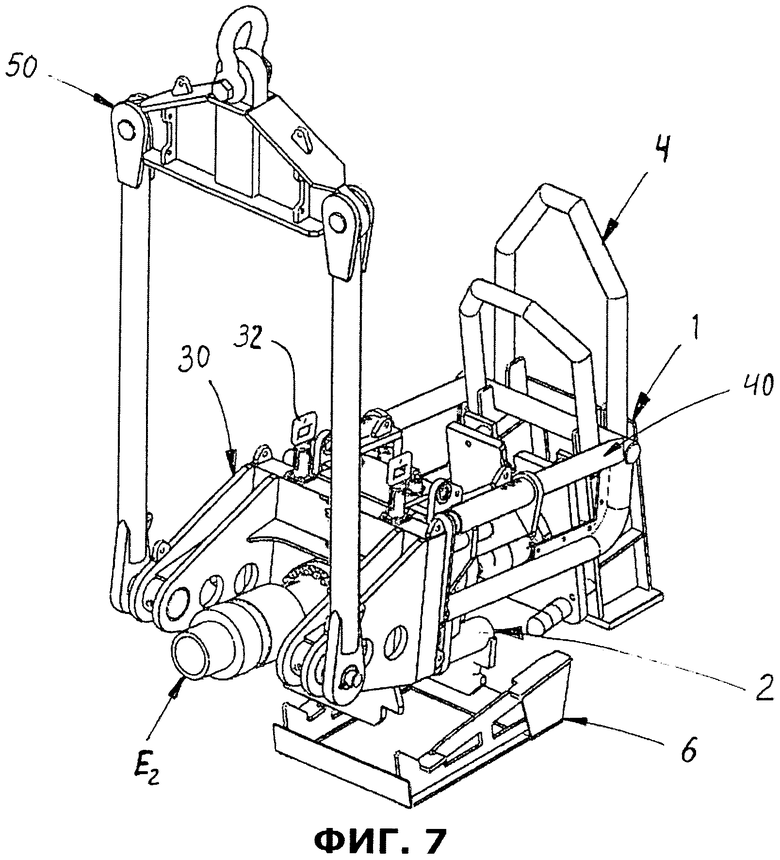
На фиг.7 показан перспективный вид приспособления при захвате им одного из трубопроводных концов, содержащего соединительную часть, которую необходимо соединить со второй соединительной частью.
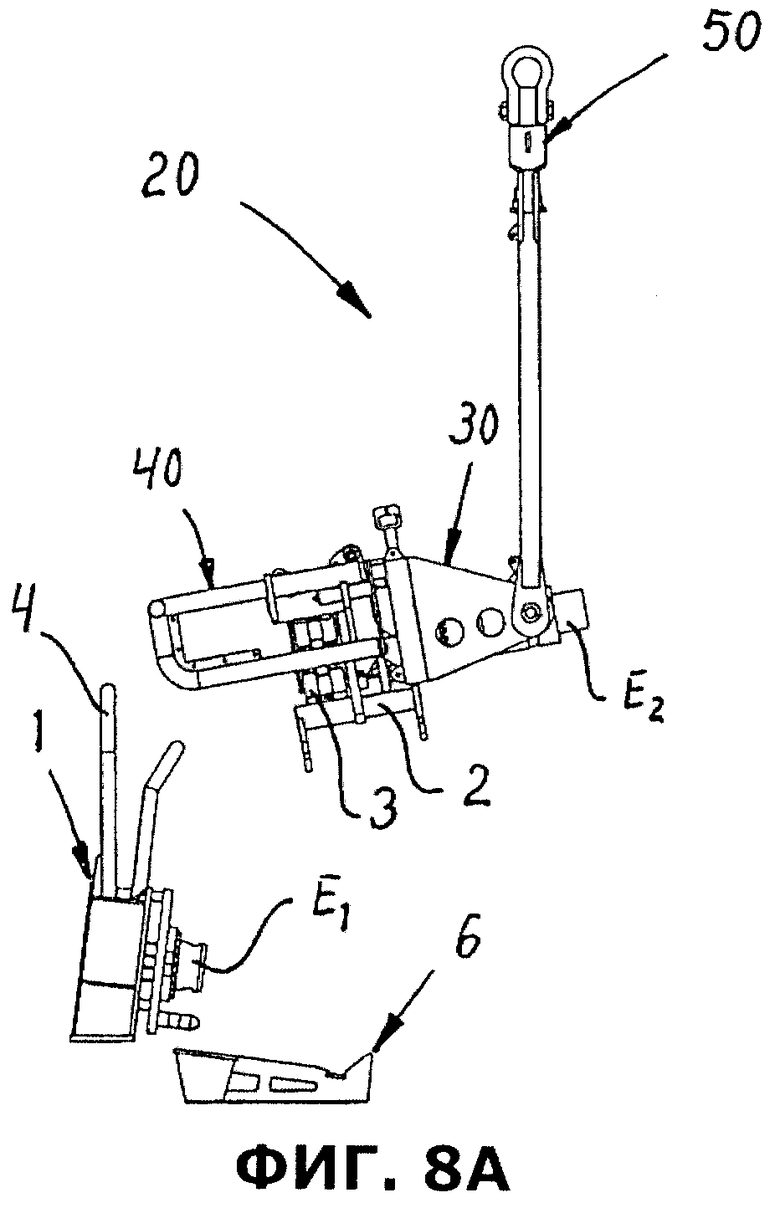
На фиг.8A-8H показана последовательность выполнения соединения.
На фиг.1 показано приспособление 20 не в рабочем состоянии, то есть в приспособлении 20 не размещен трубный конец. Согласно приведенному ранее описанию, приспособление этого типа использовано для опускания трубопроводного конца на морское дно. Трубопровод, для решения данной задачи, оканчивается соединительной частью 2 по фиг.6. Эту соединительную часть 2 необходимо направить к соединительной части 1, предварительно размещенной на морском дне, для обеспечения возможности соединения соединительных частей 1 и 2. После выполнения соединения обеспечена возможность доставки приспособления 20 обратно на поверхность для последующего использования.
Приспособление 20 содержит центральную подъемную раму 30, выполненную с возможностью удержания или поддержания трубного конца E2 (не показан на фиг.1 и 2, однако показан на фиг.3). Подъемная скоба 50 соединена с подъемной рамой 30. Подъемная скоба 50 содержит стержни, поворотно соединенные с подъемной рамой 30 посредством осевых штифтов 31. У подъемной скобы 50 ограничено перемещение для поворота вокруг осевых штифтов 31. Ограничение перемещения обеспечено двумя стяжками 53 или проволоками, проходящими соответственно между серьгой 54, расположенной наверху подъемной скобы 50, и серьгой 45, закрепленной в проушине 44 управляющей (направляющей) части 40. Управляющая часть 40 формирует продолжение подъемной рамы 30. Назначение направляющей части 40 и режим ее работы пояснены более подробно в описании для фиг.6-8, при использовании приспособления 20 с соединительной частью.
На фиг.2 показано приспособление, аналогичное приспособлению по фиг.1, однако приспособление по фиг.2 подразделено на модули, подходящие для многих вариантов. Это будет объяснено в самом конце настоящего описания. Модульное приспособление 20М содержит центральный модуль 30М подъемной рамы, управляющий модуль 40М, выполненный с возможностью высвобождения из модуля 30М подъемной рамы и образующий продолжение модуля 30М подъемной рамы, и модуль 50М подъемной скобы, выполненный с возможностью высвобождения из модуля 30М подъемной рамы. Остальные компоненты, согласно фиг.1, обозначены аналогичными ссылочными номерами.
Кроме того, приспособление 20, 20М содержит захватные средства, которые в первом случае могут быть использованы для частичного охвата и удержания трубопроводного конца Е2. Во втором случае, обычно при необходимости выполнения извлечения приспособления 20, 20М на поверхность, захватные средства могут быть высвобождены таким образом, что трубопроводный конец Е2 высвобожден из приспособления 20, 20М.
Захватные средства выполнены с возможностью высвобождения из трубопроводного конца E2 путем управления приводящими средствами 32. Приводящие средства 32 полностью специально размещены и выполнены таким образом, что они легко доступны сверху. Приводящие средства 32 предпочтительно управляются посредством устройства с дистанционным управлением (ROV), причем их легко привести в действие сверху.
Далее, каждое из захватных средств содержит зажимной кулачок 33, прикрепленный с возможностью поворота к подъемной раме 30, 30М и испытывающий влияние приводящих средств 32. Нижний конец приводящих средств 32 воздействует на скошенную поверхность 34 зажимного кулачка 33 для обеспечения его поворота.
Кроме того, в заднем конце управляющего модуля 40М расположены два крюка 46, выполненные с возможностью быстроразъемного взаимодействия с осевыми штифтами 39а, проходящими через отверстия в кронштейнах 39 модуля 30М подъемной рамы. Затем управляющий модуль 40М может быть подвешен к модулю 30М подъемной рамы посредством крюков 46 и осевых штифтов 39а и скреплен с ним посредством быстродействующих крепежных штифтов 41.
На фиг.3 показан вертикальный вид, в частичном разрезе, приспособления 20, 20М и соединительной части 2, удерживаемой в приспособлении. Соединительная часть 2 надежно удерживает трубный конец E2 трубы, а соединитель 3 готов к последующему соединению. Более полное описание будет приведено далее согласно фиг.6.
Однако следует отметить, что приспособление 20М в сборе, или только управляющий модуль 40М, может быть высвобождено из соединительной части 2, или соединено с ней. Управляющий модуль 40М содержит выступ или защелку 43, взаимодействующую с вырезом или выемкой 23, расположенным на соединительной части 2. Происходит взаимодействие защелки 43 и выемки 23 для надежного крепления соединительной части 2 к управляющему модулю 40М, несмотря на наличие некоторого люфта. На фиг.2 показан винт 47, который может быть завинчен и отвинчен. На конце, обращенном вперед согласно фиг.2, винт не имеет резьбы и выполнен с возможностью завинчивания в качестве вставки в отверстие 24 в пластине 9 соединительной части 2 (фиг.6). В альтернативном варианте вместо винта 47 может быть использованы штыковые крепежные средства, представляющие собой еще более быстрые крепежные средства.
На фиг.4A и 4B более подробно показаны захватные средства и соответствующие приводящие средства 32 и зажимные кулачки 33. На фиг.4А показаны зажимные кулачки 33 в открытом положении, то есть в положении, в котором трубный конец E2 может быть поднят и размещен в подъемной раме 30, или высвобожден из нее. На фиг.4B показаны зажимные кулачки в закрытом положении, то есть в положении, в котором трубный конец E2 жестко закреплен в подъемной раме 30. Кроме того, показана скошенная поверхность 34, на которую воздействуют приводящие средства 32. На фиг.4A и 4B приводящие средства 32 показаны в виде приводящего стержня 35 с нижним концом в форме оправки 36, воздействующей на скошенную поверхность 34 зажимного кулачка 33.
В верхнем конце приводящего стержня 35 расположены штыковые крепежные средства. Штыковые крепежные средства содержат рукав 37 с направляющим пазом 37а, жестко прикрепленный к подъемной раме 30, 30М. Кроме того, крепежные средства дополнительно содержат часть 38 оправки с выступающим штифтом 38а, перемещающимся по направляющему пазу 37а. Направляющий паз 37а может представлять собой байонетный паз.
Приведение в действие штыковых крепежных средств происходит вследствие оказания воздействия на приводящие средства 32 посредством устройства с дистанционным управлением, поворачивающим приводящие средства 32 на угол, составляющий от четверти до половины оборота, при одновременном проталкивании вниз стержня 35. Это обеспечивает возможность прикрепления трубного конца Е2 к подъемной раме 30, 30М. Под высвобождением следует понимать, что зажимной кулачок 33 выполнен самовысвобождаемым, то есть при подъеме стержня 35, зажимной кулачок совершает поворот вниз под действием собственного веса и таким образом происходит его открытие для высвобождения из трубного конца Е2.
В одном из примеров реализации (не показан), приводящий стержень может представлять собой винтовой стержень с резьбой, проходящий через рукавный корпус (соответствует рукаву 37) с внутренними резьбами, обеспечивающими возможность вывинчивания и завинчивания стержня для обеспечения воздействия на зажимной кулачок 33.
Вышеописанные захватные средства представляют собой механические решения, выполненные достаточно крепкими и надежными для обеспечения полностью безотказной работы. Кроме того, следует пояснить, что крепежные средства выполнены таким образом, что передача повышенных нагрузок происходит напрямую через зажимный кулачок и вертикальный стержень 35 непосредственно к подъемной раме. Таким образом происходит предотвращение воздействия повышенных нагрузок на устройство с дистанционным управлением (ROV), что обеспечивает возможность управления указанным устройством посредством небольших усилий.
На фиг.5A показан вид сверху приспособления 20, 20М, включая линию A-A (не прямолинейную) поперечного разреза. Указанные разрезы должны показать различные особенности приспособления 20, 20М. Эти фрагменты должны, например, показать, что управляющий модуль 40М выполнен с возможностью высвобождения из модуля 30М подъемной рамы посредством быстроразъемных средств, показанных в виде крепежного штифта 41 или шпонки. Показано на фиг.5A и 5D (фрагмент С). Используется в комбинации с крюками 46 как описано выше согласно фиг.2.
Согласно фиг.5Е (фрагмент D), модуль 50М подъемной скобы выполнен с возможностью высвобождения из модуля 30М подъемной рамы посредством быстроразъемных средств, таких как шпонки (не показаны) на концах осевых штифтов 31, к которым прикреплены стержни 51, и карабинов 56 на концах стяжек 53 для прикрепления к серьгам 45 и т.д.
На фиг.5C (фрагмент В) показан крепежный штифт 42 или шпонка, который может быть размещен в направляющей части 40 для регулирования степени демпфирования. Согласно чертежу, предусмотрено три различных положения (отверстия), в которые может быть вставлен по меньшей мере один из штифтов 42.
На фиг.6 полностью показано соединительное устройство 10, для которого выполнено приспособление 20, 20М. Согласно приведенному ранее описанию, соединительное устройство 10 содержит первую и вторую соединительные части 1, 2 и наклонную конструкцию 6.
Первая соединительная часть 1 прикреплена к подводной конструкции (не показана), такой как манифольдная или фонтанная елка. Первую соединительную часть 1 можно рассматривать как неподвижную относительно подводной конструкции. Первая соединительная часть 1 выполнена таким образом, что она поддерживает, или удерживает, конец E1 первой трубы, расположенный в подводной конструкции. Следует понимать, что первая соединительная часть 1 и первый трубопровод предварительно размещены на морском дне (вместе с подводной конструкцией). Первая соединительная часть 1 содержит направляющую конструкцию 4, расположенную на некотором расстоянии от трубного конца E1.
Далее, вторую соединительную часть 2 опускают с поверхности по направлению к подводной конструкции, а именно к первой соединительной части 1. Вследствие этого, вторую соединительную часть 2 можно рассматривать как подвижную относительно подводной конструкции. Вторая соединительная часть 2 выполнена так, что она удерживает конец Е2 второй трубы. Опускание второй соединительной части 2 с поверхности происходит посредством вышеописанного приспособления 20, 20М.
Наклонная конструкция 6 расположена рядом с первой соединительной частью 1 или вплотную к ней. Наклонная конструкция 6 выполняет важную функцию в случае, в котором необходимо состыковать соединительные части 1, 2, и возможно в последующих случаях, в которых необходимо их рассоединение. Наклонная конструкция 6 имеет упорные поверхности и направляющие средства, выполненные с возможностью взаимодействия с ответными поверхностями и средствами на второй соединительной части 2 при ее продвижении к первой соединительной части 1. Когда это выполнено, обеспечено точное совмещение между концами E1, E2 труб.
Соединитель 3 расположен на одной из соединительных частей 1, здесь он показан на второй соединительной части 2. После того, как концы E1, E2 труб точно выровнены друг с другом и сдвинуты вместе до контакта край к краю, возможно с уплотнением между ними, соединитель 3 приводится в действие и производит окончательное долговременное соединение между концами E1, E2 труб. Соединителем 3 управляет подводный аппарат дистанционного управления, который вращает резьбовой болт 3а на соединителе 3.
Обычно соединитель 3 выполнен в виде зажимного соединителя, содержащего внутренние круговые скошенные поверхности, при этом соединитель при приведении в действие подталкивает два края труб в осевом направлении друг к другу. Один из краев имеет уплотнительное кольцо, которое расположено на этом крае и содержащее наружные круговые скошенные поверхности. В альтернативном варианте, соединитель может быть выполнен в виде цангового соединителя.
Следует отметить, что в предпочтительном примере реализации наклонная конструкция 6 физически отделена от первой соединительной части 1. Далее, вторая соединительная часть 2, при необходимости, может быть оставлена на наклонной конструкции 6 после выполнения разъединения соединительных частей 1, 2. Затем подводная конструкция, часть которой представляет собой первую соединительную часть 1, может быть поднята на поверхность. Обычно для каждой подводной конструкции существует много таких первых и вторых соединительных частей 1, 2, и для специалиста очевидно, что все вторые соединительные части 2 останутся на наклонной конструкции 6 на морском дне, в случае, при котором необходимо поднять на поверхность подводные конструкции для техобслуживания, изменения, ремонта и т.п. Однако, описанное физическое разделение в целом не представляет собой обязательное разделение.
Далее будут подробно описаны наклонная конструкция 6 и первая и вторая соединительные части 1, 2. Необходимо уточнить, что направляющие средства наклонной конструкции 6 сконструированы и показаны как выступающие пластины ба в области, примыкающей к первой соединительной части 1, как это показано на чертежах. Необходимо также уточнить, что ответные средства второй соединительной части 2 сконструированы и показаны как паз 2а. Отсюда следует, что выступающая пластина 6а на наклонной конструкции 6 оказывается приведена в подвижное зацепление с пазом 2а, когда концы E1, E2 труб перемещают друг к другу на завершающей стадии операции стыковки. Когда такое зацепление полностью установлено, оно предотвращает любое наклонное движение второй соединительной части 2 относительно первой соединительной части 1.
Упорные, или контактные, поверхности наклонной конструкции 6 могут иметь наклонные поверхности 6b. Соответственно, вторая соединительная часть 2 имеет контактные поверхности 2b, взаимодействующие с наклонными поверхностями 6b, при продвижении второй соединительной части 2 по направлению к первой соединительной части 1. Одновременно, когда пазы 2а уже находятся в зацеплении с пластинами 6а, контактные поверхности 2b приподнимаются наклонными поверхностями 6b за счет продвижения второй соединительной части 2 к первой соединительной части 1, и это движение обеспечивает точное выравнивания между концами E1 и E2 труб.
Кроме того, следует отметить, что в самом заднем конце наклонной конструкции 6 расположены направленные вверх скошенные упоры 6с, которые вниз к наклонной конструкции 6 заканчиваются вертикальной кромкой 6d. Эта скошенная поверхность 6с предназначена для направления второй соединительной части 2, посредством контактных поверхностей 2b, вниз к опорной поверхности 6e на верхней стороне наклонной конструкции. Когда контактные поверхности 2b действительно достигают опорных поверхностей 6e и входят в контакт с ними, вторая соединительная часть 2 блокируется от самопроизвольного движения назад посредством прямой стопорной кромки 6d. Также заметьте, что у переднего конца опорной поверхности 6e имеется меньшего размера кромка 6f. У этой кромки 6f есть важная функция - предотвращать самопроизвольное движение соединительной части 2 к соединительной части 1, т.е. при отсутствии активного стыкования под действием тянуще-толкающего приспособления (не показано), обычно представляющего собой линейный двигатель подходящего и по сути известного типа. Благодаря наличию стопорных кромок 6d и 6f, вторая соединительная часть 2 покоится на опорных поверхностях 6е благодаря собственному весу.
Дополнительные детали первой соединительной части 1 включают заднюю пластину 7 и переднюю пластину 8. Передняя пластина 8 является опорой для конца E1 первой трубы. Между задней пластиной 7 и передней пластиной 8 известным по сути способом расположены распорки. Передняя пластина 8 содержит по меньшей мере одну согласованную державку 8а, выполненную в виде подковообразной выемки, которая предназначена для вставки тянуще-толкающего приспособления. Кроме того, передняя пластина 8 содержит по меньшей мере один направляющий штифт 8b, в этом случае показано два штифта, расположенных в нижней части передней пластины 8 и направленных в сторону второй соединительной части 2.
Дополнительные детали второй соединительной части 2 включают основную пластину 9, которая является опорой для конца E2 второй трубы. Трубчатые распорки, расположенные перпендикулярно на основной пластине 9, и размещенные внизу пустотелые распорки 9b совместно составляют направляющие средства, выполненные в виде приемной части, которая выполнена с возможностью ответного взаимодействия с вышеописанным направляющим штифтом 8b во время завершающей фазы операции стыковки соединительных частей 1, 2. Основная пластина 9 также содержит по меньшей мере одну специальную согласованную державку 9а, выполненную в форме выемки в форме буквы «и» или выреза и обеспечивающую возможность вставки вышеуказанного тянуще-толкающего приспособления.
Кроме того, между пустотелыми распорками 9b в конце, обращенном к первой соединительной части 1, жестко закреплена первая соединительная пластина 9с, а между пустотелыми распорками 9b в конце, обращенном от первой соединительной части 1, жестко закреплена вторая соединительная пластина 9d. Первая соединительная пластина 9с имеет ранее описанные пазы 2а, которые взаимодействуют с пластинами 6а на наклонной конструкции 6, т.е. точнее с теми пластинами ба, которые обращены внутрь наклонной конструкции 6. Вторая соединительная пластина 9d имеет ранее описанные контактные поверхности 2b, которые последовательно взаимодействуют сначала со скошенными поверхностями 6с, затем с опорной поверхностью 6e и стопорными кромками 6d и 6f наклонной конструкции 6, прежде чем контактные поверхности 2b начнут движение по наклонным поверхностям 6b в процессе завершающей фазы операции стыковки.
Согласно приведенному далее более подробному описанию, направляющая конструкция 4 содержит проходящую вверх рамную конструкцию 4а, которая выполнена из двух частей, выступающих наподобие буквы “Y” друг относительно друга и выполненных с возможностью принять соответствующий управляющий модуль 40М, расположенные на второй соединительной части 2 и выполненные в виде съемного приспособления 20. Управляющий модуль 40М второй соединительной части 2 содержит выступающую дугообразную конструкцию 5а, которая в начальной фазе подвижно взаимодействует с проходящей вверх рамной конструкцией 4а первой соединительной части 1. Когда дугообразная конструкция 5а полностью введена в часть 4b проходящей вверх рамной конструкции 4а до самого нижнего участка этой части 4d, вторая соединительная часть 2 вынуждена будет поворачиваться, пока не упрется в наклонную конструкцию 6. На этой фазе концы E1, E2 труб оказываются предварительно выровнены относительно друг друга. Выступающая дугообразная конструкция 5а второй соединительной части 2 предпочтительно может быть выполнена в виде раскрепляемого приспособления, которое сможет быть поднято на поверхность после того, как соединение окончательно завершено.
На фиг.7 показано приспособление 20, 20М, захватывающее вторую соединительную часть 2, удерживающую трубные концы E2.
На фиг.8A-8H показана последовательность проведения операции стыковки между соединительными частями 1, 2 с использованием наклонных конструкций 6 в качестве вспомогательных средств. Фиг.8А показывает, как вторую соединительную часть 2 опускают с поверхности, например с надводного судна. Вторая соединительная часть 2 сконструирована так, чтобы опуститься на наклонные конструкции 6, как это описано выше.
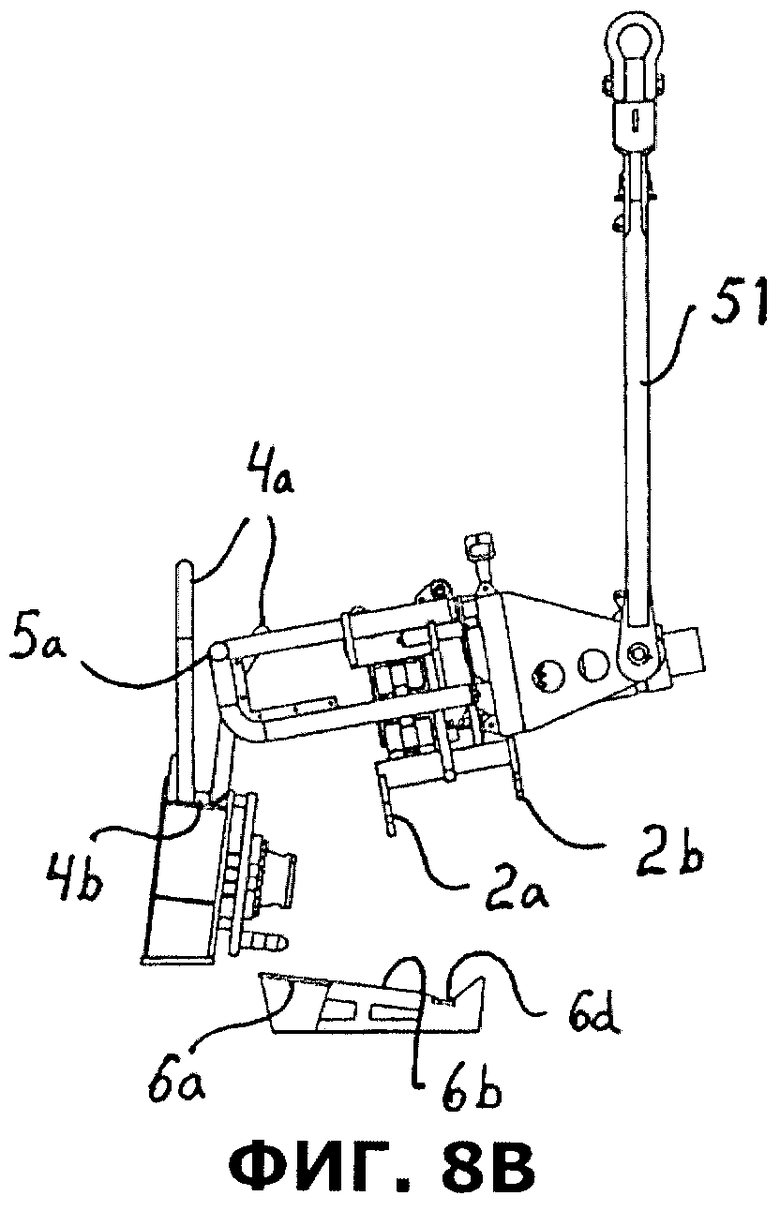
Фиг.8B показывает момент, когда вторая соединительная часть 2 достигает первой соединительной части 1, а дугообразная конструкция 5а попадает в Y-образное, расширенное кверху устье рамной конструкции 4а.
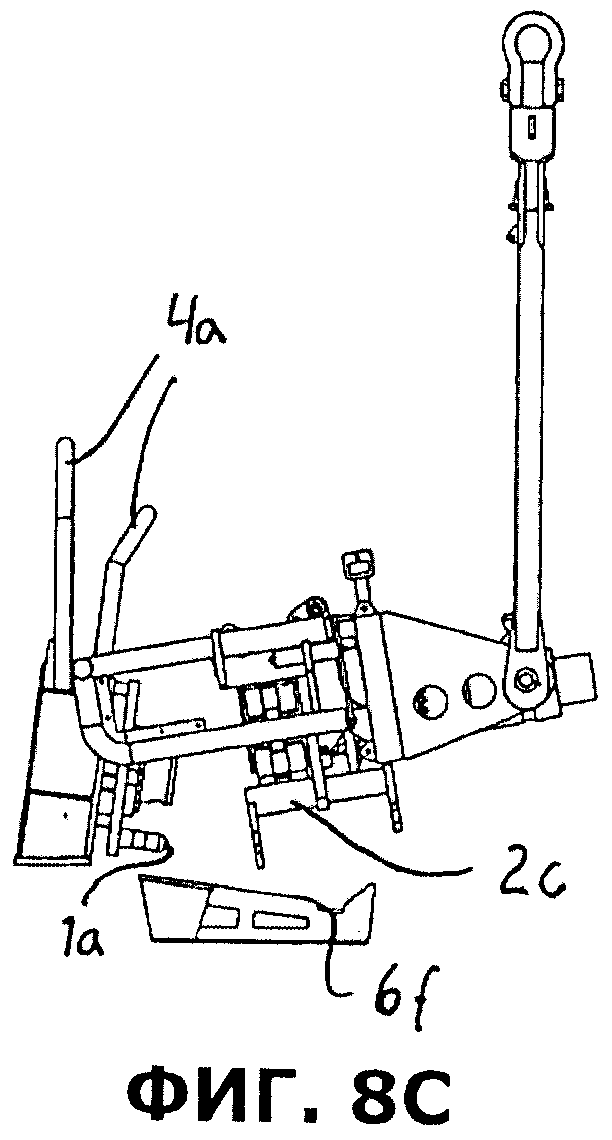
Фиг.8С показывает момент, когда дугообразная конструкция 5а достигает низа рамной конструкции 4а и начинает поворачиваться к наклонной конструкции 6 вокруг точки поворота, точно расположенной внизу рамной конструкции 4а.
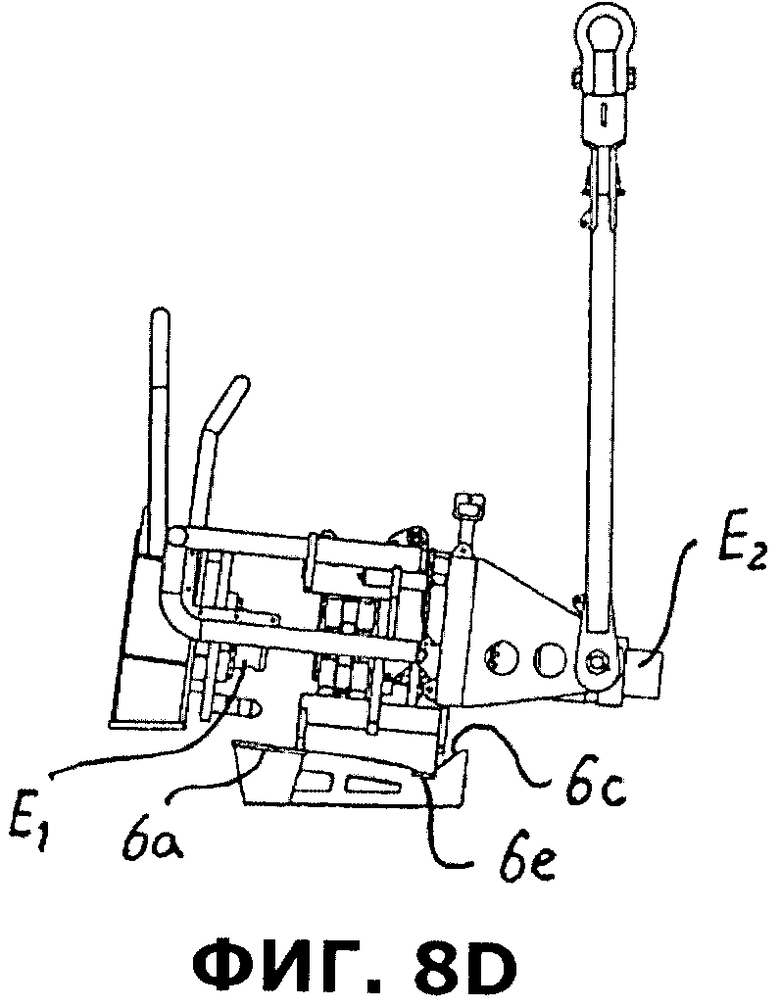
Фиг.8D показывает момент, когда вторая соединительная часть 2 достигает наклонной конструкции 6 и направляется по ней посредством скошенных поверхностей 6с. Это также та ситуация, когда пазы 2а направляются к пластинам 6а и через них, для вхождения в зацепление друг с другом.
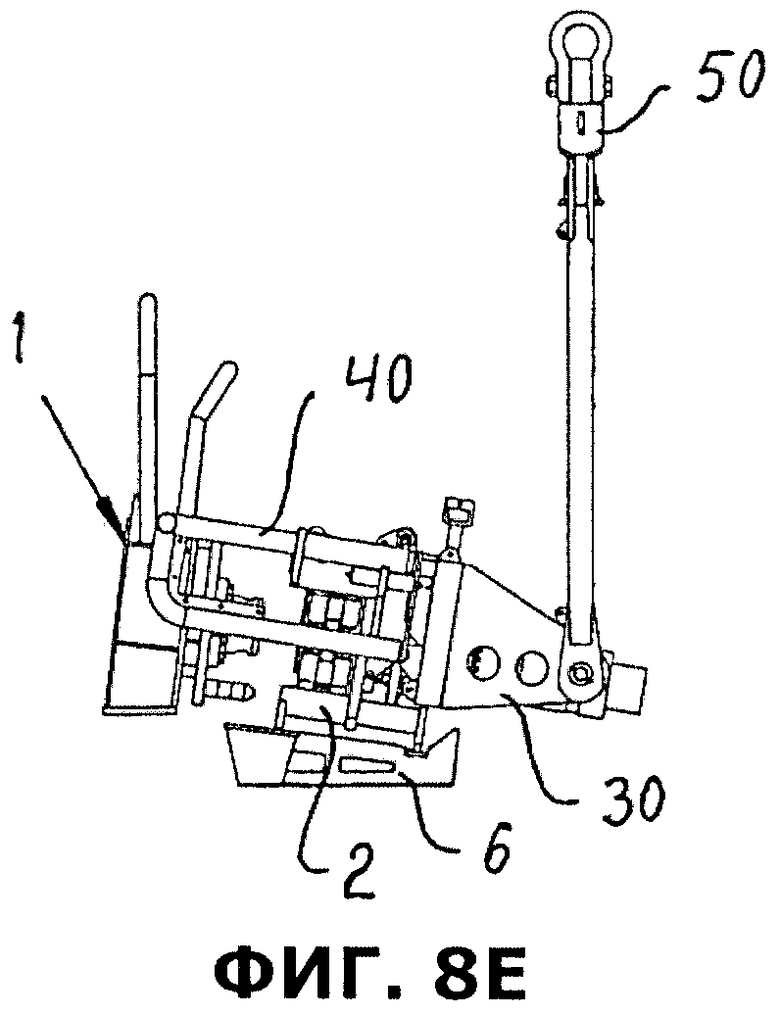
Фиг.8E показывает первое промежуточное положение перед выполнением окончательного соединения. Здесь контактные поверхности 2b стоят на опорных поверхностях 6e, а их перемещению назад препятствуют стопорные кромки 6d. Пазы 2а продвинуты вперед до зацепления с пластинами 6а и, как ранее описано, предотвращают наклон.
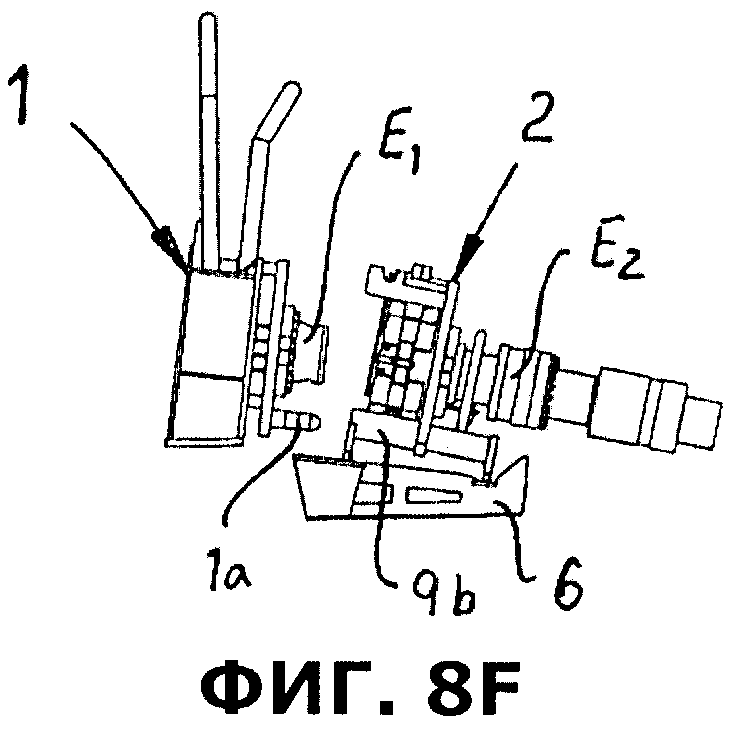
Фиг.8F показывает ту же самую ситуацию для соединительного устройства 10 как фиг.8E, но монтажное приспособление 20 уже удалено и извлечено на поверхность для последующего использования. Когда приспособление 20 удалено, кромка 6f препятствует движению устройства вперед.
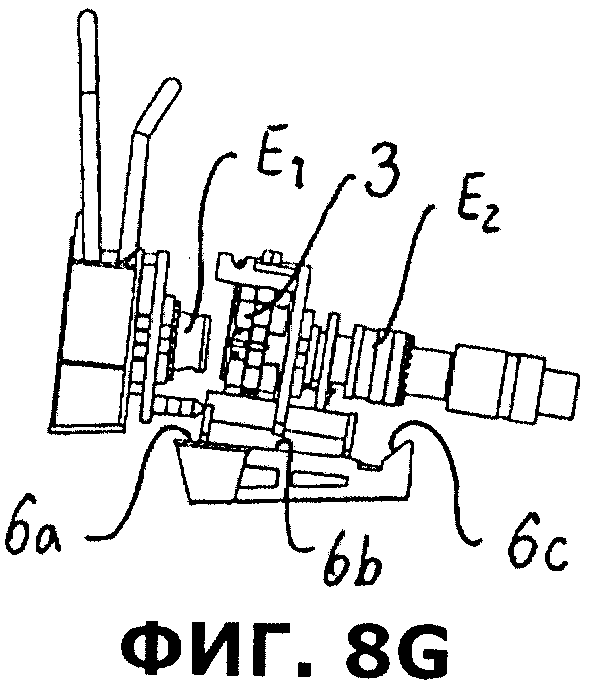
Фиг.8G показывает ситуацию, когда вторую соединительную часть 2 притянули к первой соединительной части 1 посредством тянуще-толкающего приспособления (не показано). Контактные поверхности 2b начали при этом подниматься по наклонным поверхностям 6b и наклонять верх конец Е2 второй трубы.
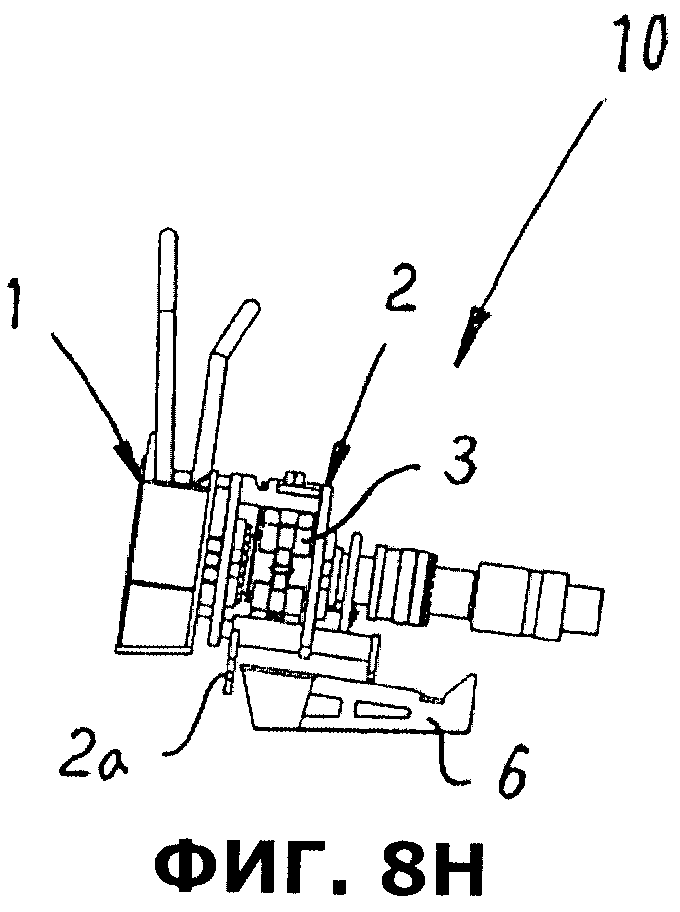
Фиг.8Н показывает ситуацию, когда вторая соединительная часть 2 полностью состыкована с первой соединительной частью 1 и готова к приведению в действие зажимного соединителя 3 для выполнения окончательного соединения. Пазы 2а прошли за пластины 6а и, расцепившись с ними, теперь остаются в свободном состоянии. После того как окончательное соединение будет завершено, контактные поверхности 2b также поднимают от наклонных поверхностей 6b. Таким образом вся вторая соединительная часть 2 оказывается освобождена от наклонной конструкции 6.
Кроме того, следует понимать, что вышеописанное решение функционирует также и для гибкого трубопровода, такого как составной шланг. Вся операция соединения функционирует таким же образом, но с увеличением количества труб на конце E2 в добавление к соединительной коробке (конечной станции) позади конца E2, имеющего электрические/оптические соединители.
При рассмотрении модульной конструкции, следует обратить внимание на норвежскую патентную заявку NO 2009 3107. В этой заявке показан только управляющий модуль, обозначенный ссылочным номером 5 и названный направляющими средствами 5. Однако следует понимать, что направляющие средства в этом случае также выполняют функцию приспособления, используемого на первом трубопроводном конце, опускаемом с надводного корабля. В этой заявке не использована подъемная рама или подъемная скоба, однако использованы подъемные средства, выполненные в виде цепи с серьгой, расположенной на ее верхнем конце, прикрепленном непосредственно к проушинам в задней части направляющих средств (или приспособления). Поскольку это представляет собой аналогичное приспособление, то оно может быть использовано с незначительными изменениями для обоих концов трубопровода.
Изобретение относится к строительству трубопроводов и может быть использовано для опускания или подъема конца трубопровода, расположенного на морском дне. Приспособление содержит соединительную часть (2), выполненную с возможностью стыковки и соединения с первой соединительной частью (1) на морском дне, центральную подъемную раму (30), направляющую часть (40), образующую продолжение подъемной рамы (30), и подъемную скобу (50). Приспособление (20) также содержит захватные средства (32, 33, 35), выполненные с возможностью частичного охватывания и удержания трубопроводного конца (E2) или выполненные разъемными для отсоединения трубопроводного конца (Е2) от подъемной рамы (30). Для повторного использования приспособление (20) выполнено с возможностью его повторной доставки на поверхность. 14 з.п. ф-лы, 20 ил.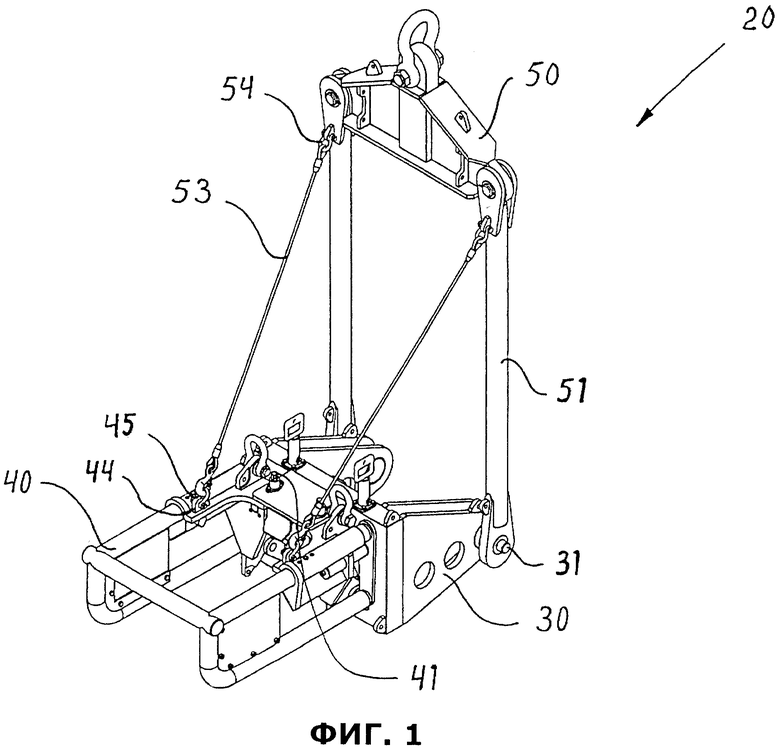
1. Приспособление для опускания или последующего извлечения трубопроводного конца, снабженного соединительной частью (2), выполненной с возможностью стыковки и соединения с первой соединительной частью (1) на морском дне, причем приспособление (20) выполнено с возможностью доставки на поверхность для повторного использования и отличается тем, что содержит центральную подъемную раму (30), направляющую часть (40), образующую продолжение подъемной рамы (30), и подъемную скобу (50), причем приспособление (20) содержит захватные средства (32, 33, 35), выполненные с возможностью, в одной ситуации, приведения в действие для частичного охватывания и удержания трубопроводного конца (Е2) и, в другой ситуации, с возможностью высвобождения трубопроводного конца (Е2) из подъемной рамы (30).
2. Приспособление по п.1, отличающееся тем, что захватные средства (32, 33, 35) выполнены с возможностью высвобождения из трубопроводного конца (Е2) путем управления приводящими средствами (32), предпочтительно доступными сверху.
3. Приспособление по п.1 или 2, отличающееся тем, что каждое захватное средство содержит зажимный кулачок (33), прикрепленный с возможностью поворота к подъемной раме (30) и испытывающий влияние приводящих средств (32), оказывающих воздействие на скошенную поверхность (34) зажимного кулачка (33) для обеспечения его поворота.
4. Приспособление по п.1 или 2, отличающееся тем, что приспособление (20) собрано из модулей, содержащих модуль (30М) центральной подъемной рамы, один управляющий модуль (40М), выполненный с возможностью высвобождения из модуля (30М) подъемной рамы и образующий его продолжение, и модуль (50М) подъемной скобы, выполненный с возможностью высвобождения из модуля (30М) подъемной рамы, причем модуль (30М) подъемной рамы содержит захватные средства (32, 33, 35).
5. Приспособление по п.4, отличающееся тем, что управляющий модуль (40М) выполнен с возможностью высвобождения из модуля (30М) подъемной рамы посредством быстроразъемных средств, таких как крюк (46), крепежный штифт (41) или шпонка.
6. Приспособление по п.4, отличающееся тем, что модуль (50М) подъемной скобы выполнен с возможностью высвобождения из модуля (30М) подъемной рамы посредством быстроразъемных средств, таких как крепежный штифт или шпонка.
7. Приспособление по любому из пп.1-2, 5-6, отличающееся тем, что оно дополнительно выполнено с возможностью управления соединительным устройством, содержащим:
первую соединительную часть (1), удерживающую первый конец (Е1) первого трубопровода, причем первый трубопровод и первая соединительная часть (1) выполнены с возможностью их предварительного опускания и размещения на морском дне, и первая соединительная часть (1) содержит направляющую конструкцию (4), расположенную на расстоянии от указанного конца (E1) трубы,
вторую погружаемую соединительную часть (2), удерживающую второй конец (Е2) второго трубопровода, причем второй трубопровод и вторая соединительная часть (2) выполнены с возможностью опускания с поверхности к первой соединительной части (1), и вторая соединительная часть (2) содержит управляющий модуль (40М), расположенный на расстоянии от указанного конца (Е2) трубы, и
соединитель (3), расположенный между соединительными частями (1, 2) для окончательного соединения между собой указанных концов (E1; E2) труб.
8. Приспособление по п.7, отличающееся тем, что управляющий модуль (40М) выполнен с возможностью ответного взаимодействия с направляющей конструкцией (4) в процессе опускания второй соединительной части (2) и поворота второй соединительной части (2) для предварительного выравнивания конца (E2) второй трубы по направлению к концу (E1) первой трубы, так что обеспечена возможность выравнивания первого и второго трубопроводов друг с другом на морском дне, и тем, что первая соединительная часть (1) содержит смежную наклонную конструкцию (6), имеющую опорные поверхности и направляющие средства, выполненные с возможностью взаимодействия с ответными поверхностями и средствами на второй соединительной части (2) при перемещении второй соединительной части (2) к первой соединительной части (1) для точного выравнивания указанных концов (E1, Е2) труб.
9. Приспособление по п.8, отличающееся тем, что смежная наклонная конструкция (6) физически отделена от первой соединительной части (1), так что обеспечена возможность оставления второй соединительной части (2) на наклонной конструкции (6) после операции разъединения между соединительными частями (1, 2), причем конструкция, частью которой является первая соединительная часть (1), выполнена с возможностью извлечения на поверхность при необходимости, в то время как другие соединительные части (2) остаются в соответствующих наклонных конструкциях (6) на морском дне.
10. Приспособление по п.8 или 9, отличающееся тем, что направляющие средства наклонной конструкции (6) содержат выступающую пластину (6а), а ответные средства второй соединительной части (2) содержат паз (2а), причем выступающая пластина (6а) и указанный паз (2а) выполнены с возможностью приведения в зацепление друг с другом при приближении концов (E1, E2) труб друг к другу с предотвращением возможного наклонного движения второй соединительной части (2).
11. Приспособление по п. 8 или 9, отличающееся тем, что упорные поверхности наклонной конструкции (6) имеют наклонные поверхности (6b), на которые воздействуют ответные поверхности (2b) второй соединительной части (2) для обеспечения точного выравнивания между концами (E1, E2) труб при продвижении второй соединительной части (2) к первой соединительной части (1).
12. Приспособление по п.8 или 9, отличающееся тем, что направляющая конструкция (4) представляет собой проходящую вверх рамную конструкцию (4а), выполненную с возможностью приема соответствующего управляющего модуля (40М), расположенного на второй соединительной части (2).
13. Приспособление по п.12, отличающееся тем, что управляющий модуль (40М) второй соединительной части (2) содержит выступающую дугообразную конструкцию (5а), выполненную с возможностью ответного подвижного взаимодействия в начальной фазе с проходящей вверх рамной конструкцией (4а) первой соединительной части (1), а при полном введении дугообразной конструкции (5а) в часть (4b) проходящей вверх рамной конструкции (4а) до самого нижнего участка этой части (4b) обеспечена возможность поворота второй соединительной части (2) до упора в наклонную конструкцию (6) и предварительного выравнивания концов (E1, Е2) труб относительно друг друга.
14. Приспособление по любому из пп.8, 9, 13, отличающееся тем, что первая соединительная часть (1) имеет по меньшей мере один направляющий штифт (1а), а вторая соединительная часть (2) соответственно содержит по меньшей мере ответную приемную часть (2с), которые совместно образуют дополнительные направляющие средства.
15. Приспособление по любому из пп.8, 9, 13, отличающееся тем, что соединитель (3) выполнен заодно с соединительным устройством (10) и закреплен на второй соединительной части (2), которая выполнена с возможностью смещения в направлении к первой соединительной части (1) и от нее, причем концы (E1, E2) труб таким образом оказываются размещены перед их завершающим соединением (3).
| WO 2008063080 A1, 29.05.2008 | |||
| US 20080014026 A1, 17.01.2008 | |||
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДОЗАТОРОМ | 0 |
|
SU316939A1 |
| СПОСОБ СОЕДИНЕНИЯ ПОДВОДНЫХ ТРУБОПРОВОДОВ | 1994 |
|
RU2118444C1 |

