Изобретение относится к транспортным средствам с комбинированным источником электропитания и может быть использовано в работе автотранспортных предприятий.
Известны транспортные средства, содержащие двигатель внутреннего сгорания, аккумуляторную батарею, зарядное устройство, преобразователь напряжения, систему управления режимами (патент RU 93051 по заявке 2009143743, дата приоритета 26.11.2009 г., дата публикации 20.04.2010 г., патент RU 2420849 по заявке 2010114582, дата приоритета 12.09.2008 г., дата публикации 10.06.2011 г., патент RU 94195 по заявке 2010100852, дата приоритета 13.01.2010 г., дата публикации 20.05.2010 г.).
Недостатком известных транспортных средств является отрицательное влияние их на экологическую чистоту окружающего воздуха за счет работы двигателя внутреннего сгорания.
За прототип принято транспортное средство с автономным ходом (патент RU 2110419 по заявке №97106840 с датой приоритета 24.04.1997 г., опубликовано 10.05.1998 г.), содержащее тяговый электродвигатель, включенный с возможностью соединения питающей цепью при контактном ходовом режиме с контактной сетью, а при бесконтактном ходовом режиме - с тяговыми аккумуляторными батареями, диодно-тиристорный соединительный узел с блоком управления. Данное техническое решение предполагает при движении транспортного средства под контактной сетью режим питания от контактной сети, а при автономном движении - от энергоблока, выполненного в виде тяговой аккумуляторной батареи.
Недостатком известного технического решения является то, что не предусмотрен режим контроля за количеством потребляемого тока при ограниченной мощности контактной сети, например, во время разгона транспортного средства.
Техническим результатом предлагаемого изобретения является расширение эксплуатационных возможностей транспортных средств при движении их на автономном ходу и при одновременной работе нескольких транспортных средств от контактной сети с ограниченной мощностью.
Предлагается транспортное средство с автономным ходом, содержащее токоприемники, устройство управления, преобразователь напряжения, подключенный первым входом к аккумуляторной батарее и соединенный выходом с тяговым двигателем, зарядное устройство, запитанное от контактной сети и соединенное своим выходом с аккумуляторной батареей.
Отличием является то, что дополнительно имеет датчик тока, который первым силовым выводом через токоприемники подключен к контактной сети, а вторым силовым выводом подключен ко второму входу преобразователя напряжения и информационным выходом соединен с устройством управления, а устройство управления при питании транспортного средства от контактной сети формирует сигнал на зарядное устройство в виде задания величины мощности заряда аккумуляторной батареи, а при превышении порогового значения тока, измеренного датчиком, устройство управления формирует на зарядное устройство сигнал, который запрещает работу зарядного устройства и прерывает заряд аккумуляторной батареи.
Другим отличием является то, что заданную величину мощности заряда аккумуляторной батареи определяют соотношением
Рзар=Рср×Δtавт/Δtзар,
где Рзар - мощность заряда аккумуляторной батареи,
Рср - средняя мощность, потребляемая подвижным составом на движение,
Δtавт - время движения транспортного средства в автономном режиме,
Δtзар - время движения транспортного средства при питании его от контактной сети.
Сущность изобретения поясняется чертежами, где на фиг.1 показана электрическая схема транспортного средства с автономным ходом, а на фиг.2 - характеристика значений нагрузки тока при разных режимах работы транспортного средства.
От контактной сети 1 через токоприемники 2 ток подается на датчик 3 и через него поступает на преобразователь напряжения 4. Преобразователь напряжения 4 формирует трехфазное напряжение, которое подается на тяговый двигатель 5. Одновременно датчик 3 подает информационный сигнал о величине потребляемого тока на устройство управления 6.
Устройство управления 6 передает разрешающий сигнал на зарядное устройство 7, а зарядное устройство, получив разрешающий сигнал, срабатывает и заряжает аккумуляторную батарею 8.
В режиме автономного хода при отсутствии контактной сети напряжение от аккумуляторной батареи 8 поступает на преобразователь напряжения 4, который формирует необходимое напряжение для тягового двигателя 5.
При достижении током от контактной сети 1 величины порогового значения, например при разгоне, устройство управления 6, получив информационный сигнал от датчика 3 о пороговом значении тока, подает команду на запрет работы зарядного устройства 7, а зарядное устройство 7, в свою очередь, прерывает заряд аккумуляторной батареи 8.
На фиг.2 показан ток нагрузки Iи с пиком потребления во время разгона транспортного средства Im2 и отрицательным пиком во время торможения Iтор. Суммарное значение тока нагрузки и тока для заряда аккумуляторной батареи обозначено Iсумм, пик потребления во время разгона транспорта обозначен Im1. Ток заряда аккумуляторной батареи при отсутствии управляющего воздействия устройства управления 6 показан в виде постоянной величины Iз. В момент разгона транспортного средства значение Iи начинает повышаться, и при достижении его значения равным значению Iп устройство управления 6, получив сигнал от датчика 3, запрещает работу зарядного устройства 7. Зарядка аккумуляторной батареи 8 в этот момент прерывается. Таким образом, исключается расход электроэнергии в этот момент на подзарядку батареи. Время, на которое прекращается зарядка аккумулятора, обозначено Δt. Значение потребляемого от контактной сети суммарного тока уменьшается на величину ΔI.
Расчет возможного количества транспортных средств, одновременно подключенных к контактной сети, производится по формуле:
N=Imax/Im ,
где Imax - пороговое значение тока срабатывания защиты тяговой подстанции;
Im - максимальная величина потребляемого тока транспортными средствами.
Снижая на каждом транспортном средстве в момент их разгона значение потребляемого тока Im за счет отключения подзарядки аккумуляторной батареи в этот момент, мы увеличиваем количество транспортных средств, которые одновременно могут работать от контактной сети ограниченной мощности.
Задавая мощность заряда аккумуляторной батареи Рзар в зависимости от средней мощности, потребляемой подвижным составом на движение Рср, и отношения времени движения подвижного состава в автономном режиме Δtавт к времени движения подвижного состава при питании его от контактной сети Δtзар (время заряда аккумуляторной батареи), мы определяем минимально необходимую величину Iз для нескольких единиц транспортного средства, одновременно подключенных к контактной сети.
Для этого используется формула:
Рзар=Рср×Δtавт/Δtзар,
где Рзар - мощность заряда аккумуляторной батареи,
Рср - средняя мощность, потребляемая подвижным составом на движение,
Δtавт - время движения транспортного средства в автономном режиме,
Δtзар - время движения транспортного средства при питании его от контактной сети.
За счет снижения значения потребляемого тока в момент максимальных нагрузок (разгона) методом уменьшения значения тока, потребляемого от сети для заряда аккумуляторной батареи, расширяются эксплуатационные возможности транспортных средств при движении их на автономном ходу и при одновременной их работе от контактной сети ограниченной мощности.
Таким образом, подтверждается существенность отличительных признаков заявляемой формулы изобретения в их причинно-следственной связи с заявленным техническим результатом.
Как следует из описания изобретения, использование предлагаемого транспортного средства с автономным ходом позволит повысить как эксплуатационные характеристики при одновременном использовании нескольких транспортных средств от контактной сети ограниченной мощности, так и получить одновременно экономию электроэнергии за счет использования энергии торможения (рекуперации) для зарядки аккумулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическое транспортное средство с комбинированным накопителем энергии | 2016 |
|
RU2633608C1 |
| Преобразователь тяговый локомотива | 2019 |
|
RU2732816C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С КОМБИНИРОВАННЫМ МУСКУЛЬНЫМ И ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2014 |
|
RU2556051C1 |
| СПОСОБ СОГЛАСОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИЕЙ ГИБРИДНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2014 |
|
RU2557686C1 |
| Система электропитания тепловоза | 2020 |
|
RU2744068C1 |
| СИСТЕМА БЕСПЕРЕБОЙНОГО ЭЛЕКТРОПИТАНИЯ | 1992 |
|
RU2037249C1 |
| Система управления легким городским электротранспортом, способ её работы и батарейный модуль | 2020 |
|
RU2782154C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПИТАНИЕМ АВТОНОМНОЙ СИСТЕМЫ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ДАННЫХ | 2017 |
|
RU2654687C1 |
| АВТОНОМНАЯ СИСТЕМА ЭЛЕКТРОПИТАНИЯ НА ПОСТОЯННОМ ТОКЕ | 2014 |
|
RU2559025C2 |
| Электроаккумуляторное устройство модульного типа | 2022 |
|
RU2784016C1 |

Изобретение относится к транспортным средствам с комбинированным источником электропитания. Транспортное средство с автономным ходом содержит токоприемники, устройство управления, преобразователь напряжения, подключенный к аккумуляторной батарее и соединенный с тяговым двигателем, зарядное устройство, запитанное от контактной сети и соединенное с аккумуляторной батареей. Дополнительно имеется датчик тока, подключенный к контактной сети и преобразователю напряжения и соединенный с устройством управления. Устройство управления при питании ТС от контактной сети задает величину мощности заряда аккумуляторной батареи. При превышении порогового значения тока, измеренного датчиком, устройство управления формирует на зарядное устройство сигнал, запрещающий работу зарядного устройства, и прерывает заряд аккумуляторной батареи. Достигается расширение эксплуатационных возможностей. 1 з.п. ф-лы, 2 ил.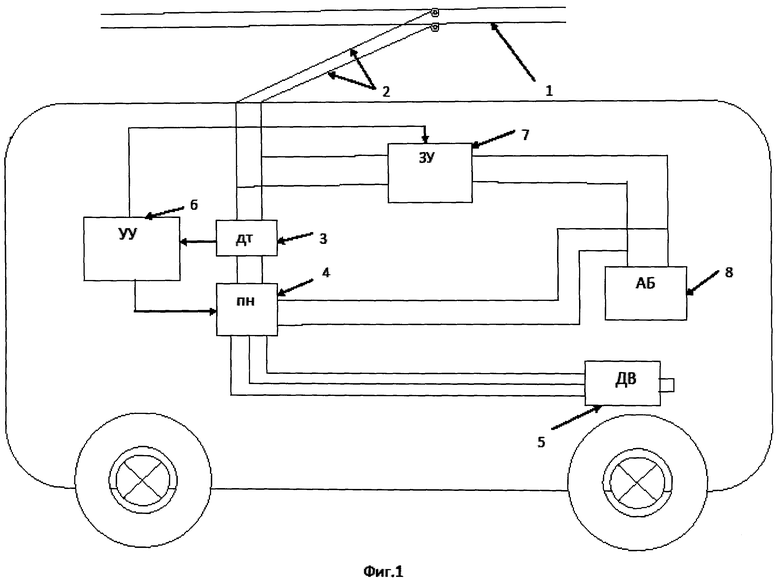
1. Транспортное средство с автономным ходом, содержащее токоприемники, устройство управления, преобразователь напряжения, подключенный первым входом к аккумуляторной батарее и соединенный выходом с тяговым двигателем, зарядное устройство, запитанное от контактной сети и соединенное своим выходом с аккумуляторной батареей, отличающееся тем, что дополнительно имеет датчик тока, который первым силовым выводом через токоприемники подключен к контактной сети, а вторым силовым выводом подключен ко второму входу преобразователя напряжения и информационным выходом соединен с устройством управления, а устройство управления при питании транспортного средства от контактной сети формирует сигнал на зарядное устройство в виде задания величины мощности заряда аккумуляторной батареи, а при превышении порогового значения тока, измеренного датчиком, устройство управления формирует на зарядное устройство сигнал, который запрещает работу зарядного устройства и прерывает заряд аккумуляторной батареи.
2. Транспортное средство по п.1, отличающееся тем, что заданную величину мощности заряда аккумуляторной батареи определяют соотношением
Рзар=Рср×Δtавт/Δtзар,
где Рзар - мощность заряда аккумуляторной батареи,
Рср - средняя мощность, потребляемая подвижным составом на движение,
Δtавт - время движения транспортного средства в автономном режиме,
Δtзар - время движения транспортного средства при питании его от контактной сети.
| ТРАНСПОРТНОЕ СРЕДСТВО С АВТОНОМНЫМ ХОДОМ | 1997 |
|
RU2110419C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО С ДВОЙНЫМ ЭЛЕКТРОПИТАНИЕМ | 1994 |
|
RU2100221C1 |
| Устройство для многократной связи | 1946 |
|
SU71601A1 |
| СИСТЕМА ЭЛЕКТРОСНАБЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2066640C1 |

