Область техники
Изобретение относится к гибридным транспортным средствам (ТС) с электромеханической трансмиссией (ЭМТ), имеющим в своем составе первичный источник энергии (ИЭ), например работающий от двигателя внутреннего сгорания (ДВС) мотор-генератор (МГ), формирующий напряжение шины постоянного тока (ШПТ), соединенный с этой же шиной вторичный источник энергии, выполняющий функции накопителя энергии (НЭ), получаемой при замедлении (торможении) ТС и дополнительного источника энергии при разгоне (движении) ТС, а также работающий от той же шины управляемый тяговый электродвигатель (ТЭД), формирующий желаемый момент (тяговое и тормозное усилие) и скорость вращения ведущих колес (скорость движения транспортного средства в целом). Причем, как источники, так и приемники электроэнергии в такой схеме могут иметь в своем составе более одной единицы оборудования: ДВС, МГ, ТЭД и т.п. Такая схема тягового оборудования получила название «последовательная кинематическая схема» и широко применяется в современных транспортных средствах. Отличием гибридных ТС от ТС с «чистой» ЭМТ является наличие дополнительного источника (накопителя) энергии, что дает дополнительные возможности экономии энергии в таких ТС и вносит специфику в управление их ЭМТ.
В общем случае, комплект тягово-энергетического оборудования (КТЭО) электромеханической трансмиссии (ЭМТ) гибридного ТС может включать:
- первичные источники энергии (ИЭ), которые могут состоять из сочетания теплового двигателя (ТД) (в частности, ДВС) с МГ - электрическими машинами, механически соединенными непосредственно или через устройство механического сопряжения (редуктор и т.п.) с выходным валом ДВС, или из топливных элементов (ТЭ), причем основное назначение ИЭ - генерация электрической энергии,
- контроллеры ИЭ, обеспечивающие требуемую электрическую мощность и напряжение на выходе ИЭ (в случае с ТД и МГ, контроллеры также обеспечивают требуемые момент, частоту вращения, мощность ТД и МГ);
- шину постоянного тока (ШПТ), с которой электрически соединены источники и потребители электроэнергии в составе КТЭО;
- вторичный источник или накопитель энергии (НЭ), который представляет собой буферный источник (накопитель) постоянного напряжения (например, электрохимический накопитель на основе суперконденсаторов, накопитель на основе аккумуляторных батарей или их сочетание и т.д.), причем в некоторых случаях в состав НЭ могут входить специальные устройства или преобразователи для сопряжения собственно накопителя с ШПТ и контроллеры для управления и контроля элементов НЭ;
- тяговые электродвигатели (ТЭД) - электрические машины, механически соединенные непосредственно или через передачу с движителями или вспомогательными механизмами ТС, основное назначение которых - приводить во вращение движители (колеса, гусеницы и т.п.) или вспомогательные механизмы ТС,
- силовые преобразователи (СП), электрически соединенные с одной стороны с ШПТ, и с другой стороны - с ИЭ (МГ), НЭ и с ТЭД, основное назначение которых - формировать требуемую электрическую мощность каждого источника и потребителя электрической энергии (электромагнитный момент МГ и ТЭД),
- контроллеров силовых преобразователей (КСП), назначение которых - управление силовыми преобразователями с целью обеспечить реализацию ТЭД и МГ требуемого электромагнитного момента (скорости вращения, мощности),
- контроллеров верхнего уровня (КВУ), назначение которых - согласованное управление всеми элементами КТЭО для реализации оптимальных и безопасных режимов его работы,
- систем и органов контроля, управления, отображения и записи информации о состоянии КТЭО для водителя (оператора) и другого обслуживающего персонала,
- вспомогательных систем (рабочих органов, приводимых в движение от вала отбора мощности (ВОМ), источников питания, систем охлаждения и т.п.).
Контроллеры, перечисленные выше, могут быть выполнены в виде отдельных электронных блоков или быть частично (полностью) объединены в едином электронном блоке. Также могут быть конструктивно объединены СП. Например, все СП могут входить в состав блока силовой электроники (БСЭ) КТЭО.
Комплект электроприводов, первичный источник и накопитель энергии и трансмиссия, как объект управления, представляет сложную взаимосвязанную нелинейную динамическую систему. В такой системе должен выполняться ряд ограничений на управления и переменные состояния: ограничение напряжений питания двигателей, токов, моментов, скоростей вращения, диапазона изменения напряжения ШПТ. Для управления КТЭО необходима разработка специальных алгоритмов, обеспечивающих автономную работу отдельных устройств, и обеспечивающих устойчивое согласованное управление всеми устройствами КТЭО, включая первичный источник энергии.
Наличие в составе КТЭО гибридного ТС накопителей электроэнергии вносит в управление КТЭО свою специфику. С одной стороны, НЭ позволяет исключить жесткую связь мощности, генерируемой ИЭ и потребляемой ТЭД. С другой стороны, НЭ может обеспечить рекуперацию механической энергии торможения (замедления) ТС в электрическую энергию с последующим ее расходом для обеспечения разгонов (пиков потребления мощности) ТС. Рекуперация энергии существенно улучшает экономичность и экологические показатели ТС в целом. Но для правильной ее организации нужны специфические алгоритмы управления всеми устройствами КТЭО, включая первичный (ИЭ) и вторичный (НЭ) источники электроэнергии.
Уровень техники
Известен способ согласованного управления электромеханической трансмиссией транспортных средств, описанный в заявке RU №2012124244/11 «Способ согласованного управления электромеханической трансмиссией транспортных средств» (МПК B60L 15/00, опубл. 20.12.2013).
Способ предназначен для согласованного управления электромеханической трансмиссией транспортных средств, включающих тепловой двигатель, механически соединенный с мотор-генератором, который через управляемый силовой преобразователь соединен с шиной постоянного тока, связанной через другой управляемый силовой преобразователь с тяговым электродвигателем. При этом способ заключается в том, что предварительно задают минимальное, максимальное и номинальное значение напряжения шины постоянного тока, нижнюю и верхнюю границу регулирования момента мотор-генератора и тягового электродвигателя по напряжению, минимальное и максимальное значение скорости вращения тягового электродвигателя, нижнюю и верхнюю границу регулирования момента по скорости вращения тягового электродвигателя, максимально допустимую величину электромагнитного момента тягового электродвигателя, минимальное и максимальное значение скорости вращения мотор-генератора, нижнюю и верхнюю границу регулирования момента по скорости вращения мотор-генератора, максимально допустимую величину электромагнитного момента мотор-генератора, диапазон стабилизации скорости вращения теплового двигателя. В каждый момент времени задают требуемую величину электромагнитного момента тягового электродвигателя, требуемую величину скорости вращения теплового двигателя. Измеряют скорость вращения мотор-генератора и определяют скорость вращения теплового двигателя. Измеряют напряжение шины постоянного тока, скорость вращения тягового электродвигателя. Определяют требуемую величину электромагнитного момента мотор-генератора по отклонению измеренного мгновенного напряжения шины постоянного тока от его номинального значения, если определенная величина превышает заданную максимально допустимую величину электромагнитного момента, требуемую величину электромагнитного момента мотор-генератора задают равной максимально допустимой величине электромагнитного момента и создают с помощью соответствующих управляемых силовых преобразователей электромагнитный момент мотор-генератора.
Указанный способ применим и к гибридным транспортным средством. Однако, при его применении в гибридных ТС с накопителем энергии необходимо учитывать следующее.
КТЭО транспортного средства без накопителя энергии отличается от КТЭО гибридного ТС, прежде всего, существенно разной емкостью накопителя в том и другом случае. В случае «чистой» ЭМТ емкость играет роль буфера и не может служить самостоятельным источником энергии. В случае гибридной силовой установки накопитель является самостоятельным источником энергии, могущим обеспечивать движение ТС на протяжении существенного отрезка времени. Поэтому в случае гибридной силовой установки появляется возможность запасать энергию торможения и использовать ее впоследствии для движения, что существенно повышает возможности по экономии топлива.
Также это позволяет управлять работой ДВС и МГ без жесткой связи с мощностью, требуемой тяговым двигателем. Поэтому возможна остановка ДВС или перевод его на холостой ход (например, при остановке и трогании от остановки) или периодическое включение ДВС-МГ для подзаряда накопителя в наиболее экономичном режиме по оборотам ДВС и отдаваемой мощности с последующим отключением и движением от накопителя.
Также в гибридной силовой установке возможен форсированный режим работы, когда тяговый двигатель работает с повышенной мощностью, обеспечиваемой одновременной работой генератора и накопителя (как правило, пиковая мощность тягового двигателя выбирается больше мощности ДВС именно для обеспечения такой возможности). Иначе говоря, мощность ТЭД уже не ограничена возможностями ДВС и МГ по генерации мощности, а работа ДВС и МГ не определяется и не ограничивается мощностью, потребляемой ТЭД. В связи с этим, должны быть исключены некоторые ограничения, использованные в заявке RU №2012124244/11 для управления ЭМТ негибридных транспортных средств.
Из уровня техники известно устройство привода вагона метро (JP 3924725 B2, опубл. 07.10.2004, МПК B61C 3/2, B60L 11/18, B60L 11/8, B61C 5/0, B61C 17/6, B61C 9/24), предназначенное для вагона с гибридной силовой установкой с накопителем на основе аккумуляторной батареи.
В составе этого устройства контроллер управляет мощностью постоянного тока, генерируемой устройством генерации электроэнергии постоянного тока, включающим выпрямитель, получающий энергию от силового генератора, приводимого от вращающегося ДВС, инвертор, способный принимать и передавать постоянный ток, и накопитель энергии, а также устройство управления каждым из этих устройств и электродвигатель тягового привода вагона.
В устройстве мощность постоянного тока на выходе генератора, мощность накопителя энергии и мощность инвертора (тягового электродвигателя) устанавливается исходя из заданных параметров управления, возможности заряда накопителя при текущей скорости вагона, количества энергии в накопителе, а устройство управления управляет инвертором в зависимости от разницы между реальной степенью заряда (SOC) накопителя и требуемой SOC. Причем в числе параметров управления имеются первый и второй опорные уровни степени заряда накопителя и гистерезисная характеристика, предназначенные для установки параметров управления ездой. Накопитель может поглощать энергию торможения, причем замедление движения вагона вызывает работу инвертора в режиме рекуперации, при этом тяговый двигатель реализует тормозной момент, а накопитель получает энергию рекуперативного торможения с выхода инвертора.
При управлении зарядом и разрядом батареи, система управления обеспечивает постоянство суммы кинетической энергии движения вагона (меняющейся в зависимости от его скорости и массы) и энергии, накопленной в батарее. Сумма этих энергий поддерживается постоянной независимо от скорости вагона. Когда скорость вагона увеличивается, запас его кинетической энергии растет, а значит - растет потенциал заряда батареи при рекуперации. Поэтому батарея должна заряжаться меньше, когда вагон движется, чем когда вагон стоит, иначе рекуперируемую энергию невозможно будет передать в батарею при торможении вагона. Таким образом, требуемый уровень заряда батареи изменяется вместе со скоростью движения вагона, и система управления работает так, чтобы батарея заряжалась до этого необходимого уровня, до того, как начнет работать дизель-генератор.
Однако, с учетом ресурса батареи, желательно, чтобы она заряжалась и разряжалась в возможно более узком диапазоне емкости. Поэтому, с учетом опыта эксплуатации батарей, авторами изобретения был выбран диапазон 20-60% полной емкости.
Применение гибридной схемы с накопителем энергии позволяет при стоянке на станции питать бортовые потребители только от батареи, при этом работа дизеля на холостом ходу исключается. Трогание вагона от станции осуществляется с использованием только заряда батареи, что уменьшает шумность и вредные выбросы от работы дизеля на станции. Дизель запускается при достижении вагоном скорости 25 км/ч, включается в работу лишь при скорости 30 км/ч, когда батарея не может обеспечить дальнейший разгон. При торможении и движении накатом, батарея накапливает энергию за счет рекуперации, а при пиковых нагрузках она отдает энергию, увеличивая развиваемое тяговое усилие для обеспечения разгона. Последовательная схема позволяет исключить механическую связь дизеля с колесами, благодаря чему частота вращения дизеля выбирается так, чтобы он работал всегда в области максимальной топливной эффективности. Если мощность, вырабатываемая дизель-генератором, превышает мощность, необходимую для тяги, избыток используется для заряда батареи.
Известный способ предназначен для применения с накопителями на основе аккумуляторов. Это вызывает необходимость ограничивать степень заряда накопителя, что накладывает ограничения на работу КТЭО и может приводить к существенному снижению эффективности рекуперации.
В известном способе включение и отключение ДВС происходит при определенной скорости движения. Таким образом, для косвенной оценки уровня кинетической энергии используется такой показатель, как скорость транспортного средства.
В известном способе не учитывается потенциальная энергия транспортного средства и возможность ее рекуперации в накопитель энергии.
Кроме того, в отличие от описанного способа управления, в предлагаемом способе помимо рекуперации энергии от тягового двигателя предусмотрена и рекуперация энергии от мотор-генератора. В ряде случаев, при достаточно большом моменте инерции МГ-ДВС, эта энергия может быть существенной.
Из уровня техники известны устройство и способ управления энергией в транспортном средстве с ЭМТ (см. US 2013138279 A1, опубл. 30.05.2013, МПК G06F 7/00). Способ относится к гибридной силовой установке, в которой используется комбинированный НЭ, состоящий из двух накопителей. Один из них является преимущественно накопителем мощности и реализован на основе СК или АКБ. Второй является преимущественно накопителем энергии и реализован на основе АКБ.
Способ направлен на оптимизацию использования компонентов накопителей энергии в транспортном средстве и основное внимание в нем уделено именно распределению потоков мощности между ними. В этом способе для регулирования заряда накопителя энергии могут учитывать кинетическую энергию ТС и потенциальную энергию ТС. Последнюю учитывают в зависимости от скорости и относительной высоты или наклона пути движения ТС.
Описанные в заявке US 2013138279 A1 устройство и способ управления энергией имеют ряд недостатков.
Во-первых, описанная в US 2013138279 A1 система с двумя типами накопителей, имеет преимущества в ограниченном спектре применений. Она хороша, если поставлена задача езды с нулевым выбросом на значительное расстояние (например, в центрах крупных городов). Для решения этой задачи и используется накопитель с высокой удельной мощностью. Если требования значительного запаса хода с нулевым выбросом нет, и ставится задача максимальной экономии горючего, накопитель с высокой удельной энергией не нужен, он только удорожает и утяжеляет ТС с гибридной силовой установкой. В отличие от известного устройства и способа, предлагаемый способ рассчитан на максимально широкий спектр гибридных ТС и может быть применен для гибридной силовой установки, оптимальной в каждом конкретном случае.
Во-вторых, в известном способе US 2013138279 A1 не учитывается КПД рекуперации, что может привести к существенным ошибка в оценке возможностей рекуперации кинетической и потенциальной энергии в накопители. Следовательно, известный способ может привести к потерям энергии, которую можно было бы сэкономить, учитывая КПД
В-третьих, в известном способе US 2013138279 A1 не конкретизирован порядок определения кинетической энергии, в частности, не учитывается кинетическая энергия вращающихся масс, которую можно рекуперировать в накопители. Учет потенциальной энергии предлагается осуществлять по текущему наклону дороги или относительной высоте (т.е. высоте относительно выбранной нулевой точки, например, уровня моря). Это может приводить к большим ошибкам в определении предполагаемой кинетической и потенциальной энергии. Ошибки могут быть вызваны и тем, что наклон дороги в ходе торможения может существенно меняться и даже менять знак. Все это в ряде случаев это может привести к потерям энергии рекуперации. В отличие от этого, в предлагаемом способе учитываются все компоненты энергии движения ТС. Для оценки приращения потенциальной энергии в предлагаемом способе учитывается перепад высот между местоположением ТС в текущее время и в момент остановки при условии, что торможение начинается немедленно. Путь, проходимый при этом, задается по экспериментальной зависимости тормозного пути ТС от начальной скорости при типовом торможении, а перепад высот от текущей точки до точки предполагаемой остановки определяется на основании данных о местоположении ТС (данных GPS/ГЛОНАСС) и/или паспортизации маршрута. Такой способ оценки потенциальной энергии обеспечивает максимально корректный учет потенциальной энергии и исключает возможность ее потери при торможении (замедлении) ТС.
В-четвертых, в способе US 2013138279 A1 предлагается увеличивать напряжение на ШПТ при росте скорости вращения ТЭД и уменьшать его при снижении скорости вращения ТЭД. Такой способ управления энергией в ЭМТ гибридного ТС кардинально отличается от предлагаемого нами. Поскольку с ростом оборотов ТЭД (следовательно - с ростом скорости ТС), напряжение на ШПТ предлагается поднимать (а не снижать) и наоборот, тем самым уменьшаются возможности рекуперации кинетической энергии ТС в накопители. Уменьшение возможностей рекуперации связано с тем, что при повышении напряжения ШПТ повысится и запас энергии в накопителях, которые подключены к шине. Повышение же энергии, запасенной в накопителях, приведет к тому, что уменьшится количество энергии, которую накопитель сможет принять при торможении ТС. В предлагаемом способе принято прямо противоположное решение. Нормальная же работоспособность ТЭД, зависящая от напряжения ШПТ, обеспечивается тем, что вводятся ограничения на мощности (моменты) источников и потребителей энергии (МГ и ТЭД), потребляемые от ШПТ и передаваемые на ШПТ только при достижении напряжением ШПТ заданных предельных значений.
Применение известного способа (US 2013138279 A1) не обеспечивает максимально возможной экономии энергии движения ТС и напротив, может приводить к существенным потерям энергии. Следовательно, известный способ не является удовлетворительным с точки зрения топливной экономичности и экологических показателей гибридного ТС, а также его стоимости и расходов на его эксплуатацию.
Раскрытие изобретения
Таким образом, в предлагаемом способе согласованного управления ЭМТ гибридного транспортного средства используется энергия движения ТС, в частности - кинетическая энергия, которая существенно зависит не только от скорости движения ТС, но и от его массы, которая может изменяться, например при посадке-высадке пассажиров, загрузке и разгрузке и т.п. Также, часть кинетической энергии обеспечивается вращающимися массами на борту ТС - вращающимися частями ДВС, трансмиссии и т.д. Все эти факторы не учитываются в известных способах, что может привести к большим погрешностям в оценке уровня кинетической энергии и возможностей ее рекуперации в накопитель энергии. Предлагаемый способ основан на учете именно энергии движения ТС, а значит, обеспечивает максимально возможную экономию энергии за счет рекуперации энергии движения в накопитель.
Кроме того, заявленный способ предусматривает возможность учета потенциальной энергии. Ее учет позволяет точнее управлять зарядом накопителя и в ряде случаев избежать потерь энергии рекуперации из-за преждевременного заряда накопителя еще до остановки транспортного средства или снижения тяги на большой скорости из-за чрезмерного снижения напряжения. Предлагаемый способ в отличие от известных предусматривает применение в самых различных конфигурациях КТЭО гибридного транспортного средства, в том числе с комбинированным накопителем, с различными типами источников энергии, принципиально отличными от ДВС-МГ, например, с топливными элементами.
Предлагаемый способ предназначен как для КТЭО с накопителем на аккумуляторах, так и на суперконденсаторах, которые не требуют ограничений по степени заряда. Зарядный ток при рекуперации в предлагаемом способе будет преимущественно ниже ограничения накопителя по зарядному току. Это дает возможность максимально полно использовать энергию рекуперации, не используя ограничения, связанные с накопителем.
Причем, в предлагаемом способе предусмотрена возможность повышения точности работы рекуперации за счет коррекции показаний датчиков напряжения накопителя. Предусмотрен учет внутреннего сопротивления накопителя и паразитного сопротивления между накопителем и шиной постоянного тока КТЭО.
В предлагаемом способе возможно управление элементами КТЭО без обязательной (как в известном способе) остановки ДВС на остановках транспортного средства. Такие остановки ДВС при большой частоте снижают ресурс ДВС, повышают требования к емкости накопителя, а значит, и к цене транспортного средства. С учетом малого времени остановок и повышенных выбросов при пуске, при использовании известного способа, особенно в маршрутных колесных транспортных средствах или в городе, возможно повышение суммарных вредных выбросов ДВС, нивелирующее эффект от применения гибридной силовой установки.
В предлагаемом способе предусмотрена скоростная коррекция, которая позволяет расширить диапазон скоростей транспортного средства. При этом диапазон скоростей делится на 2 зоны - зона полностью рекуперативного движения, в которой вся энергия торможения возвращается в накопитель (за вычетом потерь) и зона высоких скоростей, где данное условие не выполняется. При этом первая зона - режим движения по маршруту в городе, где скорость не превышает определенную границу, а вторая - вспомогательные режимы (перегон, движение за городом и т.д.). Экономия топлива, которую могла бы принести рекуперация энергии торможения в таких режимах, несущественна в силу их редкости. В этих режимах целесообразно не ограничивать мощность источника энергии для обеспечения возможности рекуперации, а обеспечить необходимую высокую мощность на выходе источника энергии КТЭО (генератора). Такое деление в способе управления ЭМТ гибридного транспортного средства позволяет использовать накопитель меньшей емкости и достигнуть лучших показателей цена/качество.
Также, в предлагаемом способе предусмотрен режим форсированного разгона («kickdown»), в котором за счет возможного снижения эффективности рекуперации (только в случае торможения сразу или вскоре после разгона) обеспечивается максимально быстрый разгон (определяемый мощностью ДВС и запасом энергии в накопителе), если этого требует дорожная обстановка. Это повышает безопасность движения.
В предлагаемом способе предусматривается введение ряда ограничений на мощности источников и потребителей энергии (моменты электрических машин) в зависимости от напряжения шины постоянного тока, скоростей вращения электрических машин. Такие ограничения предотвращают выход напряжения ШПТ, скоростей вращения МГ и ТЭД за допустимые и рациональные пределы.
Соответственно, технический результат предлагаемого способа заключается в расширении функциональных возможностей управления электромеханической трансмиссией на всех режимах работы и оптимальном управлении трансмиссией в результате перехода/выбора режима управления при движении транспортного средства, максимально возможном повышении эффективности рекуперации энергии движения транспортного средства. Это, в свою очередь, повышает энергоэффективность гибридной силовой установки, повышает топливную экономичность, улучшает экологические характеристики гибридного ТС, обеспечивает безопасную и оптимальную работу всех компонентов ЭМТ.
Указанные технические результаты достигаются благодаря применению способа согласованного управления электромеханической трансмиссией гибридного транспортного средства, включающей один источник энергии или более, один накопитель энергии или более, один или несколько тяговых электродвигателей и один или несколько электронных блоков, управляющие элементами электромеханической трансмиссии в отдельности и/или трансмиссией в целом, причем тяговые электродвигатели соединены с шиной постоянного тока через свои силовые преобразователи, а источники и накопители энергии соединены с шиной постоянного тока непосредственно или через свои силовые преобразователи заключающийся в том, что в каждый момент времени реализуют режим максимальной экономичности или могут реализовывать режим максимальной динамичности работы трансмиссии или транспортного средства в целом, причем в режиме максимальной экономичности определяют энергию движения транспортного средства ETC и коэффициент полезного действия рекуперации энергии в накопители η, при этом для накопителей, выполненных на основе суперконденсаторов определяют квадрат напряжения на накопителе U2, равный  , где C - емкость, а U0 - напряжение, соответствующее полному заряду
, где C - емкость, а U0 - напряжение, соответствующее полному заряду
накопителя, а для накопителей, выполненных не на основе суперконденсаторов определяют максимальную энергию накопителей энергии Е0, энергию, запасенную в накопителях на текущий момент E, энергию EZ, которую в текущий момент можно рекуперировать в накопители энергии, из выражения EZ=E0-E, и величину разности энергии ΔE из выражения ΔE=EZ-η·ETC, а в режиме максимальной динамичности могут предварительно задавать пороговое значение Mzt1 требуемого суммарного электромагнитного момента тяговых электродвигателей или параметра движения/управления транспортного средства, например скорости или кинетической энергии или степени нажатия педали акселератора, дополнительно определяют энергию, запасенную в накопителях Е, необходимую для обеспечения этого режима, не превышающую Е0, и могут вводить режим максимальной динамичности, если Е-Е1≤0, или если превышено вышеуказанное заданное пороговое значение, или принудительно за счет воздействия на органы управления транспортным средством, и для реализации вышеуказанных режимов регулируют задание суммарной мощности Pzg, генерируемой источниками энергии таким образом, чтобы величина U2, ΔE, или E1-E соответственно, была нулевой или больше нуля на некоторую заданную величину, а если указанная величина меньше нуля, то задают суммарную мощность Pzg, равной нулю, затем определяют необходимое для генерирования суммарной мощности Pzg количество источников энергии и обеспечивают их работу, реализуя задание суммарной мощности, генерируемой источниками энергии Pzg.
В одном из предпочтительных вариантов способа в качестве энергии движения транспортного средства ETC используют кинетическую энергию движения транспортного средства Ekinet.
В еще одном из предпочтительных вариантов способа в качестве энергии движения транспортного средства ETC используют сумму Ekinet и приращения потенциальной энергии транспортного средства ΔEpotent между его текущим местоположением и местоположением его полной остановки, прогнозируемым в предположении, что торможение начнется немедленно.
В еще одном из предпочтительных вариантов способа после выдачи сигнала на начало торможения транспортного средства обеспечивают рекуперацию запасенной кинетической энергии вращающихся масс тепловых двигателей и механически соединенных с ними мотор-генераторов Ekinet(b) на шину постоянного тока, причем в качестве энергии движения транспортного средства ETC используют величину, определяемую из выражения: 
где b - индекс, соответствующий номеру мотор-генератора,
a ηg - совокупный коэффициент полезного действия рекуперации энергии Ekinet(b) в накопители энергии,
при этом один источник энергии или более представляет собой тепловой двигатель с механически соединенным с ним одним или несколькими мотор-генераторами.
В еще одном из предпочтительных вариантов способа после выдачи сигнала на начало торможения транспортного средства запасенную кинетическую энергию вращающихся масс тепловых двигателей и механически соединенных с ними мотор-генераторов Ekinet(b) преобразуют в тепловую энергию в тепловых двигателях в процессе компрессионного торможения, прекращая подачу в них топлива, либо компенсируют ее выделение снижением расхода топлива, постепенно уменьшая требуемую скорость вращения соответствующих тепловых двигателей NzД(a), по заранее заданной зависимости NzД(a) от Ekinet(b), при этом один источник энергии или более представляет собой тепловой двигатель с механически соединенным с ним одним или несколькими мотор-генераторами.
В еще одном из предпочтительных вариантов способа дополнительно задают максимальную величину изменения задания суммарной мощности, генерируемой источниками энергии ΔPzg, а в каждый момент времени после определения Pzg, обеспечивают такую работу электромеханической трансмиссии, чтобы задание Pzg, реализуемое в текущий момент времени, изменилось по сравнению с этим же заданием, определенным в предыдущий момент времени, не более чем на величину ΔPzg.
В еще одном из предпочтительных вариантов способа хотя бы один накопитель энергии является накопителем электрической энергии, причем в каждый момент времени определяют ток хотя бы одного накопителя электрической энергии I(е) и полное сопротивление между шиной постоянного тока и этим накопителем Z(e), а далее в качестве текущего напряжения этого накопителя энергии U(e), в том числе при определении энергии этого накопителя, используют значение напряжения, меньшее, чем текущее напряжение шины постоянного тока Ud, на величину I(e)·Z(e), где e - индекс, соответствующий номеру накопителя энергии.
В еще одном из предпочтительных вариантов способа предварительно задают предельные значения напряжения шины постоянного тока и границы регулирования мощностей источников энергии и моментов тяговых электродвигателей по напряжению шины постоянного тока, предельные значения скорости вращения каждого тягового электродвигателя и границы регулирования его момента по скорости вращения, максимально допустимую величину их электромагнитных моментов, в каждый момент времени определяют скорость вращения Nt(c) каждого тягового электродвигателя, напряжение шины постоянного тока Ud, задают требуемую величину суммарного электромагнитного момента Mzt(c) тяговых электродвигателей, которую распределяют по тяговым электродвигателям, определяя требуемый момент каждого из них Mzt(c), не превышающий его заданную максимально допустимую величину, далее определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, равную Mztk1, распределяют Mrt по тяговым электродвигателям, определяя реализуемый момент каждого из них Mrt(c), и создают электромагнитный момент Mt(c) каждого тягового электродвигателя, равный Mrt(c)·k2(c), определяют мощность каждого тягового электродвигателя Pt(с), равную Mrt(c)·k2(c)·Nt(c), и величину суммарной мощности тяговых электродвигателей Pt, а после определения задания суммарной мощности, генерируемой источниками энергии Pzg, определяют величину суммарной мощности всех источников энергии Pg, равную Pzg·k3, определяют необходимое для ее генерирования количество источников энергии и обеспечивают их работу, реализуя на каждом находящемся в работе источнике энергии мощность Prg(b) причем
b - индекс, соответствующий номеру источника энергии,
с - индекс, соответствующий номеру тягового электродвигателя,
k1 - коэффициент ограничения суммарного момента тяговых электродвигателей по Ud,
к2(с) - коэффициент ограничения двигательного момента каждого тягового электродвигателя по Nt(c),
k3 - коэффициент ограничения суммарной мощности источников энергии по Ud, значения коэффициентов k1, k2 и k3 лежат в интервале [0, 1] и выбираются в зависимости от того, генерирует ли соответствующее устройство энергию на шину постоянного тока или потребляет энергию от шины постоянного тока и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k1, k2 и k3 происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра
В другом предпочтительном варианте способа в котором в качестве хотя бы одного источника энергии или более используют тепловой двигатель, причем с каждым тепловым двигателем механически соединен один или несколько мотор-генераторов, и в котором предварительно задают предельные значения напряжения шины постоянного тока и границы регулирования моментов мотор-генераторов по напряжению шины постоянного тока, предельные значения скорости вращения каждого мотор-генератора и границы регулирования его момента по скорости вращения, для каждого теплового двигателя задают зависимость требуемой величины скорости вращения от требуемой мощности  зависимость полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от требуемой
зависимость полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от требуемой  или фактической
или фактической  скорости его вращения, причем, если задают зависимость
скорости его вращения, причем, если задают зависимость  то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения
то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения  в каждый момент времени определяют скорость вращения Ng(b) каждого мотор-генератора и фактическую скорость вращения NД(а) каждого теплового двигателя, а после определения Pzg задают мощность, которую должен обеспечить каждый находящийся в работе мотор-генератор Pzg(b), распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов Pzg, задавая мощность, которую должен обеспечить каждый находящийся в работе тепловой двигатель РzД(а), по заданной для каждого теплового двигателя зависимости
в каждый момент времени определяют скорость вращения Ng(b) каждого мотор-генератора и фактическую скорость вращения NД(а) каждого теплового двигателя, а после определения Pzg задают мощность, которую должен обеспечить каждый находящийся в работе мотор-генератор Pzg(b), распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов Pzg, задавая мощность, которую должен обеспечить каждый находящийся в работе тепловой двигатель РzД(а), по заданной для каждого теплового двигателя зависимости  или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства определяют требуемую скорость его вращения NzД(a) и реализуют ее, определяют по заданной для каждого теплового двигателя зависимости
или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства определяют требуемую скорость его вращения NzД(a) и реализуют ее, определяют по заданной для каждого теплового двигателя зависимости  или
или  или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого а-то теплового двигателя, причем, если его определяют по зависимости
или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого а-то теплового двигателя, причем, если его определяют по зависимости  то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого α-го теплового двигателя, по заданной для каждого теплового двигателя зависимости
то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого α-го теплового двигателя, по заданной для каждого теплового двигателя зависимости  и если определенные Mzg(a) превышают Mgпред(a), то Mzg(a) задают равными Mgпред(a); далее определяют суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, входящие в электромеханическую трансмиссию
и если определенные Mzg(a) превышают Mgпред(a), то Mzg(a) задают равными Mgпред(a); далее определяют суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, входящие в электромеханическую трансмиссию  и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, равную Mzg·k3, и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них, и создают электромагнитный момент каждого мотор-генератора, равный Mrg(b)·k4(b), причем
и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, равную Mzg·k3, и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них, и создают электромагнитный момент каждого мотор-генератора, равный Mrg(b)·k4(b), причем
а - индекс, соответствующий номеру теплового двигателя,
b - индекс, соответствующий номеру мотор-генератора,
k3 - коэффициент ограничения суммарного момента мотор-генераторов по Ud,
k4(b) - коэффициент ограничения момента каждого мотор-генератора по Ng(b),
значения коэффициентов k3 и k4(b) лежат в интервале [0, 1] и выбираются в зависимости от того, генерирует ли соответствующее устройство энергию на шину постоянного тока или потребляет энергию от шины постоянного тока и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k3 и k4(b) происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра.
Краткое описание чертежей
На фиг.1 представлен пример гибридного транспортного средства, включающего систему управления, реализующую выполнение этапов заявленного способа.
Осуществление изобретения
Способ согласованного управления электромеханической трансмиссией гибридного транспортного средства поясняется на примере гибридного автобуса с ЭМТ переменно-переменного тока и накопителем на основе суперконденсаторов (аккумуляторных батарей), представленного на фиг.1.
Для удобства дальнейшего описания примера реализации изобретения введем следующие обозначения:
а - индекс, соответствующий номеру теплового двигателя (если в состав КТЭО входит хотя бы один ТД),
b - индекс, соответствующий номеру источника энергии (например, мотор-генератора или топливного элемента),
с - индекс, соответствующий номеру тягового электродвигателя,
e - индекс, соответствующий номеру накопителя энергии,
i - индекс, соответствующий номеру вращающегося элемента трансмиссии, кроме вращающихся элементов источников электроэнергии.
Автобус, представленный на фиг.1, имеет первичный источник энергии, включающий ДВС 1 с управляющим этим двигателем контроллером 2 и механически присоединенным к валу ДВС мотор-генератором 3. В общем случае, предлагаемый способ подходит для КТЭО с любым количеством источников электроэнергии, причем они могут быть разного типа. Например, это могут быть топливные элементы, или стационарная питающая сеть, передающая электроэнергию через систему троллей или контактный рельс и т.д.
В примере реализации изобретения на фиг.1 ДВС 1 непосредственно приводит во вращение асинхронный МГ 3. На валу ДВС и МГ установлен датчик скорости вращения ДВС (МГ) 4, сигнал которого Ng, соответствующий частоте вращения ДВС и МГ, позволяет определить фактическую скорость их вращения NД=Ng. В общем случае между ДВС и МГ могут быть установлены коробки передач, редукторы и т.п. Тогда датчик 4 будет давать значение скорости вращения одного из двух (ДВС либо МГ), а скорость вращения другого можно получить с учетом передаточного соотношения между ДВС и МГ. Нередко свой датчик имеется у ДВС, его сигнал обрабатывается в контроллере ДВС, а значение скорости вращения из последнего поступает в КВУ.
Мотор-генератор 3 выдает переменное трехфазное напряжение на вход размещенного в блоке силовой электроники (БСЭ) автобуса 5 силового преобразователя МГ (выпрямителя) 6.
Выход выпрямителя 6 соединен посредством шины постоянного тока 7 БСЭ с входами силового преобразователя ТЭД (инвертора) 8, также размещенного в БСЭ 5. К шине постоянного тока подключен датчик напряжения 9, измеряющий мгновенное значение напряжения на ней Ud.
К ШПТ также подключен накопитель энергии 10, выполненный на основе суперконденсаторов (СК) с интегрированными контроллерами (на фиг.1 контроллеры СК не показаны, совокупность блоков СК показана в виде единого блока). Накопитель 10 в общем случае может быть выполнен и на основе других устройств, например, современных литий-ионных аккумуляторных батарей (АКБ) с интегрированными контроллерами (на фиг.1 контроллеры АКБ не показаны, совокупность блоков АКБ показана в виде единого блока). Иногда СК или АКБ подключаются к ШПТ не непосредственно, а через согласующий преобразователь постоянно-постоянного тока (конвертор) или устройство сопряжения (дроссель специальной конструкции и т.п.). Такое подключение может понадобиться для повышения напряжения АКБ до значений, удобных для работы электромашин в составе КТЭО, для согласования работы СК и АКБ в комбинированном накопителе или для других целей. На фиг.1 приведен пример подключения АКБ к ШПТ через конвертор.
К выходу инвертора 8 подключен тяговый асинхронный электродвигатель (ТЭД) 11, который через свой редуктор 12 и дифференциал 13 приводит во вращение задний мост 14 автобуса. На одном валу с двигателем 11 установлен датчик скорости его вращения Nt 15. Таким образом, в описываемом автобусе реализована схема заднего привода с мотор-осью.
Скорости вращения электрических машин КТЭО (МГ и ТЭД) Ng и Nt могут не только измеряться непосредственно, но и определяться (корректироваться) по измеренным электрическим параметрам соответствующих машин (например, по измеренным мгновенным значениям их фазных токов и напряжений) (см. примеры - Виноградов А.Б.: Векторное управление электроприводами переменного тока. Учебное пособие - Иваново: ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина», 2008, 298 с., с.234-244).
Требуемый электромагнитный момент Mzt ТЭД задается в каждый момент времени педалью «газ» 16, установленной в кабине водителя автобуса, его величина передается через усилитель 17 и аналого-цифровой преобразователь 18. В транспортных средствах задание тягового момента (в т.ч. суммарного электромагнитного момента тяговых двигателей для КТЭО с более чем одним ТЭД) может также определятся контроллером верхнего уровня (КВУ), который осуществляет согласованное управление всеми устройствами, входящими в КТЭО. Задание Mzt может формироваться КВУ на основе анализа условий движения транспортного средства, или специальным регулятором скорости движения и т.п.
Требуемая скорость вращения ДВС NzД задается в каждый момент времени КВУ 19. В общем случае, в транспортных средствах скорость вращения ДВС может определяться условиями работы рабочих органов, приводящихся в движение от теплового двигателя, или по максимальной топливной эффективности теплового двигателя и т.п. В таком случае требуемая скорость вращения ДВС определяется программным обеспечением, предварительно введенным в КВУ 19 или в контроллер ДВС 3. Аппаратно реализуется условие задания в допустимых пределах. Контроллер верхнего уровня, осуществляющий согласованное управление всеми элементами КТЭО, может быть создан на базе современного цифрового программируемого контроллера (микро-ЭВМ). Он управляет ДВС посредством передачи в его контроллер 3 задания требуемой скорости его вращения NzД. Задание требуемой скорости может быть реализовано в виде аналогового сигнала, сигнала широтно-импульсной модуляции, сигнала CAN и т.п.
Если в качестве источника энергии используется устройство, принципиально отличное от ДВС, например ТЭ, то такие устройства также обычно оснащаются своими контроллерами, причем КВУ может управлять такими источниками энергии, задавая требуемое выходное напряжение, ток или мощность. В случае, если первичным источником энергии является стационарная сеть, необходимость в управлении ею со стороны КВУ 19 отсутствует, достаточно только определения ее напряжения в каждый момент времени.
КВУ 19 также управляет МГ и ТЭД посредством передачи в контроллер силовых преобразователей (КСП) 20, размещенный в БСЭ 5 вместе с силовыми преобразователями 6, 8 заданий создаваемых МГ и ТЭД электромагнитных моментов. В свою очередь, КСП преобразует эти задания в сигналы управления (открытия и закрытия) силовых ключей выпрямителя 6 и инвертора 8. Если накопитель энергии 10 включает управляемые силовые преобразователи (см. фиг.1), управление ими также может осуществляться КВУ.
В кабине водителя имеется информационное табло 21, предназначенное для вывода различных данных о работе КТЭО, информационных сообщений, предупреждения водителя о нарушениях в работе КТЭО.
В КВУ 19 посредством ПЭВМ 22 предварительно вводят и хранят там ряд данных.
Это:
- максимальная энергия каждого накопителя энергии Е0(e) (для электрохимических накопителей это энергия, соответствующая их полному заряду, обычно она задается производителями элементов накопителей, может уточняться в зависимости от одного или ряда параметров режима работы КТЭО, времени наработки НЭ и т.п.),
- коэффициент полезного действия (КПД) рекуперации энергии в накопители η, который в частности может учитывать полученные экспериментально или теоретически КПД ηt(c) рекуперации энергии из каждого ТЭД на ШПТ и КПД η(е) заряда каждого НЭ от ШПТ (указанные КПД вводят в виде константы или в зависимости от одного или ряда параметров режима работы элемента или совокупности элементов КТЭО, например в зависимости от скоростей вращения ТЭД Nt(c), напряжения ШПТ Ud, температуры элементов КТЭО (обмотки ТЭД, модуля НЭ и т.п.) и т.п., условий движения ТС, условий окружающей среды и др.),
- для каждого накопителя энергии зависимость запасенной в нем энергии (или других текущих параметров накопителя, например, степени заряда SOC) от его текущего напряжения  в аналитическом или табличном виде (обычно задается производителями элементов НЭ, может уточняться в зависимости от одного или ряда параметров, таких как температура элементов НЭ, их ток и т.п.),
в аналитическом или табличном виде (обычно задается производителями элементов НЭ, может уточняться в зависимости от одного или ряда параметров, таких как температура элементов НЭ, их ток и т.п.),
- момент инерции каждого вращающегося элемента трансмиссии Ji (получается из данных производителей элементов трансмиссии или определяется экспериментально),
- предельные значения Udmin и Udmax напряжения ШПТ и границы регулирования  и
и  мощностей ИЭ и моментов ТЭД по напряжению ШПТ,
мощностей ИЭ и моментов ТЭД по напряжению ШПТ,
- предельные значения Ntmin(c) и Ntmax(c) скорости вращения каждого ТЭД и границы регулирования  и
и  его момента по скорости вращения,
его момента по скорости вращения,
- максимально допустимая величина Mztmax(c) их электромагнитных моментов.
В принципе, в качестве НЭ может использоваться и устройство, предназначенное для накопления энергии не в виде химической (как в АКБ) или электрической (как в конденсаторах) энергии, а механические, гидравлические, пневматические накопители. При этом такие накопители должны быть оснащены устройством преобразования накопленной энергии в электрическую. Например, современные маховичные накопители энергии (так называемые «супермаховики») часто укомплектованы электрическим синхронным генератором с постоянными магнитами на одном валу с маховиком. При отдаче энергии вращающийся маховик приводит генератор во вращение, а магнитный поток постоянных магнитов вызывает появление напряжения (тока) на выходе генератора. Для таких и подобных им накопителей их разработчиками (производителями) задаются характеристики подобные вышеупомянутыми характеристиками СК и АКБ.
В рассматриваемом примере реализации изобретения в КВУ 19 вводят КПД ηt рекуперации энергии из ТЭД 11 на ШПТ 7. В случае, если накопитель энергии 10 гибридного ТС выполнен на основе суперконденсаторов, вместо энергии Е0, соответствующей полному заряду накопителя 10, в КВУ 19 вводят емкость С накопителя 10, напряжение U0, соответствующее его полному заряду, и коэффициент полезного действия ηе заряда накопителя 10 от ШПТ 7. Для более точной работы КВУ емкость С и напряжение Uq накопителя 10 могут задаваться в зависимости от параметров его работы, в частности, в зависимости от времени наработки, что позволяет учесть некоторую деградацию характеристик суперконденсаторов с течением времени. Подобные зависимости обычно обеспечивают производители элементов накопителей (СК, АКБ).
Поскольку при прямом подключении к ШПТ 7 зависимость энергии, запасенной в суперконденсаторном накопителе 10 от его текущего напряжения (равного Ud) представляет собой жесткую математическую зависимость вида
то нет необходимости вводить в КВУ зависимости E(e)=ƒ(U(e)), SOC(e)=f(U(e))) или др. подобную. Такая необходимость имеется, если накопитель 10 выполнен на базе АКБ, или комбинированным, или если СК подключен к шине 7 не непосредственно, а через устройство согласования (конвертор и т.п.). Во всех этих случаях указанные зависимости обычно задаются производителями элементов НЭ или могут быть определены опытным путем.
В том случае, если хотя бы один источник энергии состоит из сочетания ТД и МГ, в КВУ 19 предварительно вводят:
- предельные значения Udmin и Udmax напряжения ШПТ и границы регулирования  и
и  по напряжению ШПТ для моментов МГ и ТЭД,
по напряжению ШПТ для моментов МГ и ТЭД,
- предельные значения Ngmin(b) и Ngmax(b) скорости вращения каждого МГ и границы регулирования  и
и  его момента по скорости вращения,
его момента по скорости вращения,
Для каждого ТД (ДВС) в КВУ 19 вводят:
- зависимость требуемой величины скорости вращения от требуемой мощности ТД NzД(a)=ƒ(PzД(a)),
- зависимость полезного момента, который можно передать с данного ТД на приводимые от него МГ, от требуемой MzД(a)=ƒ(NzД(a)) или фактической MzД(a)=ƒ(NzД(a)) скорости вращения данного ТД.
Причем, если задают зависимость MzД(a)=ƒ(NzД(a)), то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него МГ, от фактической скорости его вращения Мgпред(а)=ƒ(NД(а)).
Для обеспечения оптимального управления КТЭО указанные характеристики вводят оптимальными в отношении определенного критерия (расхода топлива, КПД ТД и/или совокупного КПД ТД и каких-либо элементов КТЭО, или КПД КТЭО в целом, сочетания расхода топлива и КПД и т.д.)
Упомянутые выше зависимости MzД(a)=ƒ(NzД(a)), MzД(a)=ƒ(NzД(a)) и NzД(a)=ƒ(PzД(a)) получают на основе обеспечиваемых заводами-изготовителями ТД или получаемых экспериментально многопараметровых характеристик, на которых отражается зависимость от скорости вращения ТД данного типа ряда его параметров: обеспечиваемого ДВС вращающего момента, полной мощности и расхода топлива.
В КВУ 19 посредством ПЭВМ 22 предварительно введено программное обеспечение, содержащее описываемые ниже алгоритмы определения и распределения энергий и мощностей источников и накопителей энергии, электромагнитных моментов, реализуемых мотор-генераторами и тяговым электродвигателями, ограничения параметров работы электрических машин в составе КТЭО.
Алгоритмы реализации ограничений параметров работы МГ и ТЭД подробно описаны в заявке RU №2012124244/11. Поэтому в настоящем описании действие этих ограничений будет описано кратко со ссылкой на указанную заявку, причем внимание будет обращаться на отличия в алгоритмах действия ограничений и распределения электромагнитных моментов, реализуемых МГ и ТЭД, вызванных особенностями работы КТЭО гибридных транспортных средств, а именно наличием накопителей энергии.
В общем случае ограничения выполняются за счет того, что реализуются регулируемые параметры (мощности ИЭ, электромагнитные моменты МГ и ТЭД), равные требуемым значениям (мощностям, моментам), умноженным на соответствующие коэффициенты ограничений k1, k2(c), k3 и k4(b).
Используются коэффициенты ограничений:
k1 - коэффициент ограничения суммарного момента тяговых электродвигателей по Ud,
k2(c) - коэффициент ограничения двигательного момента каждого тягового электродвигателя по Nt(c),
k3 - коэффициент ограничения суммарной мощности источников энергии (суммарного момента мотор-генераторов) по Ud,
k4(b) - коэффициент ограничения момента каждого мотор-генератора по Ng(b).
Значения вышеуказанных коэффициентов ограничений лежат в интервале [0, 1] и выбираются в зависимости от того, генерирует ли соответствующее устройство энергию на ШПТ или потребляет энергию от ШПТ и в зависимости от соответствующих каждому коэффициенту значений (соответственно Ud, Nt(c), Ud и Ng(b). Значения коэффициентов выбирается в зависимости от того, лежат ли эти значения внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, а изменение коэффициентов происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра.
В итоге, если коэффициент ограничения принимает нулевое значение, реализуемая мощность (момент) будет нулевой. Если коэффициент принимает значение 1, ограничение не вводится, реализуется мощность (момент), равный требуемому. Если же коэффициент ограничения принимает значение между 0 и 1, реализуется мощность (момент), меньшие, чем требуемые.
Если в КТЭО транспортного средства входят более одного ТЭД, то в КВУ 19 в каждый момент времени на основе введенных предварительно коэффициентов ηt(c) получают соответствующий совокупный коэффициент рекуперации ηt из всех ТЭД на ШПТ. Такой совокупный КПД рекуперации может определяться, например, пропорционально вкладу мощности каждого тягового двигателя Pt(c) в их суммарную мощность Pt из выражения:
При этом, в простейшем случае значения КПД рекуперации могут быть приняты постоянными (по результатам экспериментов при типовом торможении), а для более точного определения КПД рекуперации может использоваться аппроксимация по экспериментально полученной зависимости КПД от характеристик движения ТС (скорости на момент начала торможения, массы ТС, степени нажатия педали «тормоз» и т.д.).
В КВУ 19 в каждый момент времени поступают измеренные и определенные значения:
- напряжения шины постоянного тока Ud от датчика 9,
- скорости вращения каждого тягового электродвигателя Nt(c) (в рассматриваемом примере - скорости Nt от датчика 15).
Также в КВУ 19 в каждый момент времени может поступать измеренное значение тока накопителя энергии (элементов накопителя) I(е) от соответствующих датчиков.
Далее в общем случае определяют текущее напряжение каждого накопителя энергии U(e) и/или другие параметры, например степень заряда накопителя SOC(e), позволяющие однозначно определить запасенную в каждом накопителе энергию Е(е). Методы определения таких параметров обычно указывают производители элементов накопителей. В частности, для АКБ степень заряда SOC или текущую накопленную энергию Е(е) определяют в зависимости от температуры, напряжения и тока (интеграла тока за определенный период времени) каждого элемента (блока) АКБ. Определяют суммарную накопленную в НЭ энергию:
Е=ΣЕ(е).
Аналогично совокупному КПД рекуперации из всех ТЭД на ШПТ ηt, в каждый момент можно получить совокупный КПД рекуперации с ШПТ в накопители ηe: например, пропорционально вкладу энергии каждого накопителя Е(е) в их суммарную энергию Е (общую накопленную энергию):
Как указано выше, в рассматриваемом примере реализации изобретения, энергию суперконденсаторного накопителя можно однозначно определить по известному значению Ud.
Если в состав КТЭО входит хотя бы один тепловой двигатель и/или мотор-генератор в качестве источника электроэнергии, то в КВУ 19 в каждый момент времени поступают измеренные и определенные значения скорости вращения каждого мотор-генератора Ng(b), прямо пропорциональной скорости вращения соответствующих ТД NД(а) (в рассматриваемом примере - скорости Ng от датчика 4),
В КВУ 19 в каждый момент времени определяют массу транспортного средства М и скорость его движения V. Скорость автобуса V определяют непосредственно по показаниям стандартных датчиков скорости, которые обычно устанавливают на переднем (ведомом) мосту. Скорость V можно определять и косвенным путем по показаниям датчика 15 скорости вращения Nt ТЭД 11, зная параметры редуктора 12, дифференциала 13 и заднего моста 14 (в т.ч. колес) автобуса. Массу М можно с достаточной точностью определить по показаниям датчиков давления в пневмоподвеске осей ТС. Для автобуса можно считать массу постоянной между остановками на маршруте его движения. Таким образом, достаточно считывать в КВУ 19 значение массы М при скорости близкой или равной нулю (F=0) и принимать считанное значение массы постоянным в каждый момент времени до следующего момента, когда скорость автобуса окажется нулевой.
Также в КВУ 19 в каждый момент времени определяют частоту вращения каждого вращающегося элемента трансмиссии ωi. Помимо уже определенных скоростей элементов трансмиссии (ТЭД 11 с его валом и редуктора 12 с его валом) можно зная величину Nt и заводские параметры трансмиссии определить ωi для остальных ее элементов (дифференциала 13, заднего моста 14 и т.д.).
Зная указанные выше параметры движения транспортного средства, в каждый момент времени можно определить кинетическую энергию его движения из выражения:
Следует отметить, что изменения кинетической энергии зависят от угла наклона дорожного полотна и других факторов: скорости и направления ветра, температуры дороги и т.д.
Далее в КВУ 19 в общем случае определяют энергию EZ(e), которую в текущий момент может принять каждый накопитель энергии в процессе заряда, из выражения:
EZ(e)=E0(e)-E(e),
где Е0(е) - энергия, соответствующая полному заряду е-го накопителя,
Е(е) - энергия, соответствующая текущему (фактическому) заряду е-го накопителя.
Определяют суммарную энергию EZ, которую в текущий момент можно рекуперировать в накопители энергии, из выражения
EZ=E0-E
или
EZ=ΣEZ(e).
В КВУ 19 поступают мгновенные значения задаваемого водителем транспортного средства требуемого суммарного электромагнитного момента ТЭД Mzt. В случае, если ТЭД не один, заданная водителем величина Mzt распределяется в КВУ 19 по тяговым электродвигателям, т.е. КВУ определяет требуемый момент каждого из тяговых электродвигателей Mzt(c), в соответствии с введенным в него посредством ПЭВМ 22 алгоритмом. При распределении КВУ задания Mzt(c) по тяговым электродвигателям, для каждого из них оно ограничивается КВУ на уровне, не превышающем его заданную максимально допустимую величину Mzt(c)≤Mztmax(c), которая определяется исходя из физических ограничений тягового привода (самих ТЭД, редукторов, дифференциалов и т.д.).
Далее в КВУ 19 в общем случае определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, ограниченную в зависимости от напряжения ШПТ. Механизм действия данного ограничения подробно описан в заявке RU №2012124244/11 (первое ограничение). Цель введения данного ограничения - не допустить выхода Ud за определенные границы рабочего диапазона, который обеспечивает эффективную и безопасную работу электромашин и др. элементов КТЭО.
После определения суммарного момента ТЭД Mrt его распределяют по тяговым электродвигателям, определяя реализуемый момент каждого из них Mrt(c).
В итоге в каждый момент времени создают электромагнитный момент каждого тягового электродвигателя, ограниченный в зависимости от соответствующей мгновенной скорости вращения Nt(c) каждого ТЭД. Механизм действия данного ограничения также подробно описан в заявке RU №2012124244/11 (второе ограничение).
Цель ограничения - не допустить выхода скорости вращения ТЭД за определенные границы рабочего диапазона, что необходимо для обеспечения безопасности работы ТЭД (по условиям его механической прочности и прочности механически связанных с ним элементов трансмиссии).
В рассматриваемом примере после получения заданного водителем тягового момента Mzt и ограничения его на уровне Mztmax, момент Mzt последовательно подвергается (при необходимости) действию ограничений по Ud и Nt.
При управлении КТЭО гибридного транспортного средства следует учитывать, что между скоростью вращения ТД (или мощностью, вырабатываемой первичным источником энергии в более общем случае) с одной стороны, и мощностью на тягу ТС (которая характеризуется моментом Mzt) с другой стороны нет прямой зависимости. Это связано с наличием в составе гибридного ТС вторичного источника энергии - накопителя 10, который обеспечивает пики потребления мощности в тяговом режиме КТЭО и поглощает излишки мощности в тормозном режиме. Поэтому нет необходимости в жестком ограничении работы источников энергии по мощности (моменту) ТЭД, которые целесообразно применять в ТС с «чистой» ЭМТ (без накопителя).
Вслед за определением момента Mt(c), реализуемого каждым тяговым электродвигателем ТЭД после ограничений, в каждый момент времени определяют мощность Pt(c) каждого ТЭД из выражения

и величину суммарной мощности Pt тяговых электродвигателей:
Способ согласованного управления электромеханической трансмиссией гибридного транспортного средства основывается на том, что основным источником экономии является рекуперация и сохранение энергии движения ТС в накопителе, в частности - рекуперация кинетической энергии движения ТС и кинетической энергии вращающихся масс трансмиссии.
Отсюда условие - при начале торможения в произвольный момент времени энергия, полученная при рекуперации, не должна перезарядить накопитель энергии. Только тогда не произойдет потери энергии. Следовательно, энергия движения ETC гибридного транспортного средства (в частности, кинетическая энергия Ekinet), являющаяся источником заряда накопителя, не должна превышать энергию EZ, которую в данный момент может принять накопитель, с учетом потерь энергии при рекуперации.
С другой стороны, понижать напряжение накопителя ниже некоторой рациональной границы (соответственно, повышать EZ выше уровня Ekinet чаще всего нецелесообразно, поскольку это не дает ощутимых преимуществ, но снижает запас энергии, которая может быть востребована при необходимости интенсивного разгона транспортного средства. Кроме того, понижение напряжения ШПТ 7 ниже определенного уровня (соответственно, повышение EZ) может понизить реализуемые моменты ТЭД 11 и МГ 3. Таким образом, условием оптимальной работы КТЭО будет:
ETC=EZ
или
Ekinet=EZ.
В некоторых случаях целесообразно также задавать некоторый «запас» энергии накопителя Δ, т.е. держать накопитель немного недозаряженным (иметь EZ=Ekinet+Δ). Это позволяет обеспечить полную рекуперацию энергии торможения в накопитель даже в случае резкого повышения кинетической энергии, например при нетиповом (резком) торможении.
Приведенное выше условие реализуется следующим образом.
В КВУ 19 в общем случае определяют разность полученной ранее энергии движения ТС (автобуса) ETC и энергии EZ, которую в данный момент времени способен принять накопитель 10 в случае начала рекуперации при его замедлении (торможении), умноженной на КПД η рекуперации энергии в накопители:
Для КТЭО с НЭ, состоящим из нескольких элементов

где первый член соответствует суммарной энергии, которую может принять накопитель из более чем одного элемента, а второй член - кинетической энергии движения ТС с учетом КПД рекуперации энергии в каждый накопитель и КПД рекуперации от ТЭД 11 до ШПТ 7.
Внутри КВУ 19 программными средствами реализуют регулятор суммарной мощности, генерируемой источниками энергии Pzg, на вход которого подают указанную разность, а на выходе этого регулятора получают величину Pzg, причем если указанная разность принимает отрицательные значения, то задают Pzg равной нулю, что соответствует холостому ходу или отключенному состоянию источников электроэнергии КТЭО.
Последнее может быть реализовано, например, если в составе КТЭО первичный источник энергии представляет собой механически соединенные между собой мотор-генератор и ДВС с системой «старт-стоп», которая прекращает подачу топлива в цилиндры ДВС по команде контроллера 2, если тот в свою очередь получает от КВУ 19 задание NzД, соответствующее холостому ходу (нулевой требуемой мощности Pzg, полученной на выходе описанного регулятора). При этом в КВУ должен быть реализован алгоритм определения дополнительного дискретного параметра (со значением «1-0», соответственно «старт-стоп»), который поступает на вход контроллера ДВС 2. В контроллере 2 или в КВУ 19 может быть реализован алгоритм определения этого параметра, исключающий излишне частые пуски и остановки ДВС, например алгоритм с гистерезисом по Pzg.
Данный регулятор суммарной мощности источников энергии Pzg может быть в простейшем случае выполнен пропорциональным (П-регулятор) или пропорционально-интегральным (ПИ-регулятор), но может быть и более сложным (релейным, следящим и т.д.). Указанный регулятор может быть выполнен и аппаратно в виде отдельного конструктивного узла (контроллера и т.п.).
Получив величину Pzg, в КВУ 19 определяют реализуемую величину суммарной мощности всех источников энергии Prg, ограниченную в зависимости от напряжения ШПТ. Механизм действия данного ограничения подробно описан в заявке RU №2012124244/11, где ограничение Pzg осуществляется посредством ограничения момента МГ (первое ограничение). Цель введения этого ограничения - не допустить выхода Ud за границы рабочего диапазона.
Далее определяют необходимое для генерирования Prg количество источников энергии и обеспечивают их работу. В рассматриваемом примере работа источника энергии обеспечивается посылкой из КВУ на контроллер ДВС 2 задания NzД, а на КСП 20 задания соответствующего момента Mg, который реализуется МГ 3. В общем случае, возможна посылка на контроллер источника электроэнергии (например, топливного элемента) задания по выходным мощности или напряжению. В итоге, каждым находящимся в работе источником энергии реализуется мощность Prg(b), причем 
В рассматриваемом примере, где накопитель 10 выполнен на основе непосредственно подключенного к ШПТ 7 блока СК, регулятор может иметь несколько другой вид. В этом случае на вход ПИ-регулятора суммарной мощности источников энергии Pzg может подаваться не разность кинетической энергии движения ТС и энергии, которую в данный момент времени способен принять накопитель, а величина напряжения суперконденсаторного накопителя U, которое требуется реализовывать на накопителе (фактически - на ШПТ), чтобы при начале торможения (замедления) автобуса вся его кинетическая энергия могла быть рекуперирована в накопитель, который в итоге зарядится до напряжения U0.
Квадрат U равен:
или
Второй член разности соответствует возможности рекуперации кинетической энергии ТС (автобуса) в накопитель.
Причем, если эта разность меньше нуля, то задают суммарную мощность, генерируемую источниками энергии Pzg, равной нулю, а в противном случае определяют требуемую величину напряжения накопителя из выражения:
или

Далее подают U на вход регулятора суммарной мощности источников энергии Pzg и получают на выходе этого регулятора величину Pzg, которую затем реализуют посредством КВУ 19, КСП 20 и контроллера 2 с учетом ограничения по напряжению ШПТ.
Если в состав КТЭО входят ТД, то в КВУ 19 определяют требуемую скорость вращения NzД(а) каждого из них и реализует ее.
Далее в КВУ по заданной для каждого ТД зависимости Mzg(a)=ƒ(NzД(a)) или Mzg(a)=ƒ(NД(a)) определяют суммарный электромагнитный момент MzД(a), который должны обеспечить мотор-генераторы, приводимые от каждого ТД. Причем, если MzД(a) определяют по зависимости от требуемой скорости MzД(a)=ƒ(NzД(a)), то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого ТД по заданной для него зависимости Mgпред(a)=ƒ(NД(a)) и ограничивают суммарный момент, обеспечиваемый МГ, приводимыми от каждого ТД МzД(a) значением определенного предельного момента Мgпред(a).
Из величин суммарных электромагнитных моментов Mzg(a) МГ, приводимых каждым ДВС, определяют суммарный электромагнитный момент, который должны обеспечить все МГ, входящие в КТЭО Mzg=ΣMzg(a).
В рассматриваемом примере реализации изобретения определяют Pzt, Pzg, NzД, Mgпред и Mzg.
Для КТЭО, в котором более одного мотор-генератора, в КВУ 19 определяют реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, ограничивая величину Mzg в зависимости от напряжения ШПТ (первое ограничение в заявке RU №2012124244/11). Затем величину суммарного электромагнитного момента всех МГ Mrg распределяют по мотор-генераторам, определяя реализуемый момент Mrg(b) каждого из них, и создают электромагнитный момент Мg(b) каждого МГ, ограниченный в зависимости от соответствующей мгновенной скорости вращения Nrg(b) каждого МГ. Механизм действия данного ограничения также подробно описан в указанной заявке (третье ограничение). Цель этого ограничения - не допустить выхода скорости вращения МГ за определенные границы рабочего диапазона, что необходимо для обеспечения безопасности работы МГ (по условиям механической прочности его и связанных с ним элементов КТЭО).
Сигналы, пропорциональные определенным в КВУ 19 моментам ТЭД 11 Mt и МГ 3 Mg, поступают на вход КСП 20, который управляет выпрямителем 6 и инвертором 8 таким образом, что мотор-генератор 3 и тяговый электродвигатель 11 КТЭО при помощи известных методов реализуют электромагнитные моменты, равные соответственно Mt и Mg (пример реализации заданного момента - Виноградов А.Б.: Векторное управление электроприводами переменного тока. Учебное пособие - Иваново: ГОУВПО «Ивановский государственный энергетический университет им. В.И. Ленина», 2008, 298 с., с.196-206).
Для повышения точности работы описанного способа согласованного управления ЭМТ гибридных транспортных средств, в нем может делаться поправка на сопротивление, присутствующее между накопителем энергии 10 и шиной постоянного тока 7. В общем случае, это может быть полное (активно-реактивное) сопротивление Z(e) между шиной постоянного тока и по меньшей мере одним из элементов накопителя 10. Оно может включать паразитное сопротивление шин (проводов), внутреннее сопротивление согласующего устройства (конвертора, дросселя и т.п.) между элементом накопителя 10 и ШПТ 7 и др. и в некоторых случаях может быть значительным.
В простейшем случае непосредственного подключения суперконденсаторного накопителя к ШПТ, как на фиг.1, это внутреннее активное сопротивление накопителя. Его значение задается изготовителями СК.
Для повышения точности работы описанного способа, на ответвление от ШПТ к НЭ могут устанавливать датчик тока накопителя I(e) 23, данные с которого передаются в КВУ 19. Датчик 23 может использоваться и для защитных функций.
В КВУ 19 предварительно вводят полное сопротивление между ШПТ и накопителем энергии Z(е). Это сопротивление также может оцениваться в ходе работы способа управления ЭМТ гибридного ТС (способ его оценки не входит в предмет данной заявки). Сопротивление между ШПТ и НЭ может рассчитываться по мгновенным значениям тока накопителя I(е) и напряжения на ШПТ Ud при помощи методов, которые указывают производители НЭ. В каждый момент времени измеряют ток указанного накопителя I(e) и далее в способе в качестве текущего напряжения этого накопителя энергии U(e) используют значение напряжения, меньшее, чем определенное Ud, на величину I(e)·Z(e).

Использование скорректированного таким образом значения напряжения накопителя U(e) обеспечивает увеличение КПД КТЭО.
При этом в упомянутых выше ограничениях мощностей (моментов) МГ и ТЭД работают по нескорректированному напряжению Ud, т.к. электрохимия накопителей обычно имеет сложный характер, и для надежной защиты от перезаряда накопителей целесообразнее обеспечить работу защитных алгоритмов по более высокому (нескорректированному) значению Ud.
Для обеспечения плавного изменения мощности источников энергии и параметров КТЭО в целом, в описанном способе согласованного управления ЭМТ гибридных ТС выход описанного выше регулятора суммарной мощности источников энергии Pzg может ограничиваться по темпу изменения мощности. В случае с тепловыми двигателями это обеспечивает плавное изменение их оборотов и нагрузки, что способствует их оптимальной работе, снижению выбросов и повышению топливной экономичности.
С этой целью в КВУ 19 предварительно вводят максимальную величину изменения реализуемой мощности всех источников энергии ΔPrg. В каждый момент времени после определения реализуемой величины суммарной мощности всех источников энергии Prg, сравнивают ее с величиной, реализованной в предыдущий момент времени  , причем если
, причем если  (темп изменения Prg в пределах нормы), то реализуют определенную на текущий момент мощность Prg. Если же
(темп изменения Prg в пределах нормы), то реализуют определенную на текущий момент мощность Prg. Если же  (темп изменения Prg выше нормы), то в данный момент времени реализуют величину суммарной мощности всех источников энергии, равную
(темп изменения Prg выше нормы), то в данный момент времени реализуют величину суммарной мощности всех источников энергии, равную
 при
при  (потребность в мощности ИЭ слишком быстро растет),
(потребность в мощности ИЭ слишком быстро растет),
или равную
 при
при  (потребность в мощности ИЭ слишком быстро падает). После этого запоминают фактически реализованную величину Prg, которую в следующий момент времени используют как
(потребность в мощности ИЭ слишком быстро падает). После этого запоминают фактически реализованную величину Prg, которую в следующий момент времени используют как  .
.
В реализации способа согласованного управления электромеханической трансмиссией гибридных транспортных средств, если в состав КТЭО входят ТД и МГ, имеющие вращающиеся части, можно учесть и наличие кинетической энергии их вращающихся частей. Следует учитывать, что энергия вращения, запасенная в МГ и ТД при их торможении может:
- расходоваться на компрессионном торможении ТД,
- в случае, если задание мощности (оборотов) на ТД снижается постепенно, частично компенсироваться снижением потребления топлива в процессе этого снижения,
- быть рекуперирована в накопитель с помощью МГ.
Последний способ предполагает доработку базового способа. Для этого необходимо дополнительно рассчитывать кинетическую энергию этих вращающихся масс и ее добавлять к определяемой в вышеописанном способе кинетической энергии Ekinet с учетом КПД рекуперации МГ (а не ТЭД, как в случае рекуперации «по колесам»).
Таким образом, в способе согласованного управления ЭМТ гибридных ТС, в КТЭО которых входят хотя бы по одному ТД и МГ после выдачи сигнала на начало торможения ТС запасенную кинетическую энергию вращающихся масс тепловых двигателей Ekinet(a) и механически соединенных с ними мотор-генераторов Ekinet(b):
- преобразуют в тепловую энергию в ТД 1 в процессе компрессионного торможения, прекращая подачу в них топлива (если такая возможность предусмотрена в контроллере ТД 2),
- либо компенсируют ее выделение снижением расхода топлива, постепенно уменьшая требуемую скорость вращения соответствующих ТД NzД(a), по заранее заданной зависимости NzД(a) ОТ Ekinet(a) и/или Ekinet(b)
- либо обеспечивают ее рекуперацию на шину постоянного тока 7.
Причем, в последнем случае в КВУ 19 предварительно вводят коэффициент полезного действия ηg(b) рекуперации энергии из каждого МГ на ШПТ и момент инерции вращающихся частей ТД J(a) и МГ J(b). Соответствующие КПД могут быть определены эмпирически или заданы в виде константы (характеристики, таблицы и т.п.), а моменты инерции обычно даются заводами-изготовителями ТД и МГ.
В последнем варианте для рекуперации кинетической энергии вращающихся масс ТД и МГ в накопитель, в каждый момент времени определяют частоту вращения каждого вращающегося ТД ω(а) и механически соединенных с ним МГ ω(b). На основе КПД ηg(b) получают соответствующий совокупный коэффициент ηg (например, пропорционально вкладу мощности каждого МГ в их суммарную мощность, см. выше аналогичный пример для ТЭД).
После выдачи сигнала на начало торможения транспортного средства определяют кинетическую энергию вращающихся ТД и механически соединенных с ними МГ из выражения:
Затем определяют разность

Эту разность подают на вход регулятора суммарной мощности, генерируемой источниками энергии Pzg и получают на выходе этого регулятора величину Pzg, причем если указанная разность принимает отрицательные значения, то задают Pzg равной нулю.
Поскольку емкость (энергоемкость) накопителя энергии в гибридных ТС обычно выбирается как компромисс между запасаемой энергией и стоимостью, емкость не может быть выбрана достаточно большой, чтобы обеспечить рекуперацию энергии торможения для всего диапазона скоростей без чрезмерного снижения напряжения на накопителе (что обеспечивается ограничением по низкому напряжению Ud).
Для того, чтобы максимально расширить диапазон скоростей ТС, при которых возможна полная рекуперация кинетической энергии в накопитель, нижние границы регулирования  по напряжению ШПТ моментов (мощностей) источников энергии (МГ) и ТЭД следует максимально снизить. При этом их нужно снижать так, чтобы при скорости, на которой реализуются эти напряжения, еще не происходили ограничения мощности МГ и ТЭД из-за нехватки напряжения. Однако это означает, что даже при поддержании такого постоянного напряжения на ШПТ, при дальнейшем росте скорости движения наступит ограничение мощности ТЭД из-за недостаточного напряжения.
по напряжению ШПТ моментов (мощностей) источников энергии (МГ) и ТЭД следует максимально снизить. При этом их нужно снижать так, чтобы при скорости, на которой реализуются эти напряжения, еще не происходили ограничения мощности МГ и ТЭД из-за нехватки напряжения. Однако это означает, что даже при поддержании такого постоянного напряжения на ШПТ, при дальнейшем росте скорости движения наступит ограничение мощности ТЭД из-за недостаточного напряжения.
Для устранения этой проблемы в алгоритме может быть принято допущение, что движение ТС происходит на маршруте с ограниченной скоростью и в заданных пределах скоростей, когда напряжение ШПТ не снижается ниже предельного (минимального) значения Udmin, а более высокая скорость требуется лишь для вспомогательных перегонов ТС вне маршрута. Такие допущения вполне корректны для маршрутных ТС, таких как автобус.
Упомянутая более высокая скорость на перегонах требует в первую очередь хорошей динамики, а топливная экономичность отходит на второй план.
Для реализации высокой динамики ТС способ согласованного управления ЭМТ гибридного транспортного средства может быть модифицирован следующим образом.
В модифицированном способе согласованного управления ЭМТ гибридного ТС со скоростной коррекцией в простейшем случае (накопитель выполнен на базе СК и непосредственно подключен к ШПТ) могут задавать некоторую пороговую скорость движения ТС V1. Например, для автобуса в примере реализации изобретения могут задавать V1=50-60 км/ч.
Когда задана пороговая скорость V1, в модифицированном способе со скоростной коррекцией линейно поднимают требуемое напряжение на накопителе от напряжения, определенного для скорости V1 из выражения

до некоторого заданного UVmax, причем это максимально возможное напряжение соответствует условию: UV1<UVmax≤U0.
Далее подают UVmax на вход регулятора суммарной мощности источников энергии Pzg и получают на выходе этого регулятора величину Pzg, которую затем реализуют посредством КВУ 19, КСП 20 и контроллера 2.
При этом в режиме «динамика» (когда превышено пороговое значение V1) способ будет постоянно поддерживать на ШПТ заданное напряжение, достаточное для работы МГ и ТЭД с максимальной мощностью при текущей скорости движения (например, максимально возможное напряжение на накопителе UVmax), что позволит максимально использовать емкость накопителя для динамичной езды (за счет отказа от рекуперации).
Напряжение на ШПТ может поддерживаться и несколько меньшим, чем UVmax, тогда в накопителе сохраняется определенный резерв недобранной энергии рекуперации, что позволяет снизить вероятность потери кинетической энергии из-за перезаряда накопителя, который может произойти при торможении ТС. С другой стороны, работы с напряжением, меньшим, чем UVmax исключает возможность использования максимума энергии накопителя при форсированном разгоне в том случае, когда МГ имеет меньшую мощность, чем ТЭД и, следовательно, требуется помощь накопителя. Таким образом, выбор напряжения на ШПТ, необходимого для данного типа ТС, определяется характеристиками и типовыми режимами работы ТС.
В общем случае (накопитель комбинированный, на основе АКБ и т.д.), в модифицированном способе со скоростной коррекцией предварительно для каждого накопителя энергии задают зависимость запасенной в нем энергии Е(е) от некоторого параметра, позволяющего однозначно определить запасенную в накопителе энергию. В качестве этого параметра может использоваться напряжение на шине постоянного тока Ud и/или другие параметры, например степень заряда накопителя SOC(e).
В каждый момент времени в способе с коррекцией определяют необходимое для обеспечения требуемых режимов работы ЭМТ значение параметра, позволяющего однозначно определить запасенную в накопителе энергию, по которому определяют необходимую для этого суммарную энергию накопителей Е1.
Если выполняется условие Е-Е1≤0 (текущая суммарная энергия НЭ меньше или равна энергии, требуемой для реализации ЭМТ режима «динамика») подают на вход регулятора суммарной мощности ИЭ Pzg вместо разности энергий EZ-η·ETC (в описанном способе без коррекции) разность энергий E1-E.
На выходе этого регулятора получают величину Pzg. Причем указанный регулятор может быть отличен от регулятора, используемого в описанном выше способе.
Переход в режим «динамика» может быть выполнен и принудительно за счет воздействия на органы управления ТС. Переключение режима движения ТС «экономия» - «динамика» может выполняться, например, переключателем на панели управления водителя.
При этом в режиме «динамика» модифицированный способ будет постоянно поддерживать на ШПТ максимально возможное напряжение UVmax (или напряжение, достаточное для работы МГ и ТЭД) (максимальную суммарную мощность, генерируемую источниками энергии Pzg), что позволит использовать энергию накопителя для динамичной езды за счет отказа от рекуперации и сохранения кинетической энергии в накопителе в полном объеме.
Максимальной динамики можно также достичь, полностью нажав педаль «газ» 16. Такой режим в современной технической литературе нередко называется «kickdown» (т.е. режим с полностью нажатой педалью «газ»). При этом необходимо обеспечить поддержание максимального напряжения на накопителе в пределах его мощности (которая, как правило, ниже мощности ТЭД, поэтому снижение напряжения все-таки следует ожидать). При нажатии педали менее чем на заданную величину (например, для автобуса 70-90%) «kickdown» не происходит. В приведенном примере реализации изобретения, наступление режима «kickdown» можно определить, задавая некоторый пороговый момент ТЭД.
В модифицированном способе согласованного управления ЭМТ гибридного ТС с мощностной коррекцией предварительно задают пороговое значение Mzt1 требуемого суммарного электромагнитного момента тяговых электродвигателей. Причем, Mzt1 может быть задано как постоянным, так и в виде зависимости от напряжения Ud на ШПТ, необходимого для обеспечения требуемых режимов работы ЭМТ. Помимо момента ТЭД, может быть задано пороговое значение какого-либо параметра движения ТС (например, скорости его движения или кинетической энергии ТС) или параметра управления ТС (например, степень нажатия педали «газ»).
При превышении заданного порогового значения (в примере реализации изобретения - Mzt1), подают на вход регулятора мощности ИЭ Pzg вместо разности энергий EZ-η·ETC (способ без коррекции) значение EZ и получают на выходе этого регулятора величину Pzg.
При подаче на вход регулятора значения EZ вместо разности EZ-η·ETC мощность, генерируемая источником энергии (в примере мощность ДВС-МГ) будет максимально возможной, а напряжение Ud на ШПТ 7 будет максимально высоким в пределах заданных ограничений, что позволит получить на ТЭД максимально возможный тяговый момент. Это, в свою очередь, обеспечит движение автобуса с максимально возможной динамикой.
В некоторых случаях при согласованном управлении ЭМТ гибридных ТС бывает важно учитывать наряду с их кинетической энергией потенциальную энергию. Это, например, характерно для местностей с большими и повторяющимися перепадами высот. Не учтенная потенциальная энергия, если применяется рекуперация кинетической энергии согласно описанному выше способу, может существенно отразиться как на КПД КТЭО (снизить возможности рекуперации энергии), так и на динамике движения транспортного средства, а в отдельных случаях - и на безопасности движения (вызвать увеличение тормозного пути или необходимость экстренного торможения). Учет потенциальной энергии может быть наиболее эффективно выполнен для маршрутных транспортных средств (автобусов, маршрутных такси и т.п.) или если возможно провести паспортизацию (предстоящего) маршрута движения ТС.
Для учета потенциальной энергии способ может быть модифицирован следующим образом.
Предварительно задают зависимость ожидаемого тормозного пути транспортного средства от его текущей скорости и/или других параметров ТС и характеристик его движения. Такая зависимость может быть получена экспериментально или определена известными приближенными методами (см., например, Лукьянчук А.Д.: Безопасность транспортных средств. Учебное электронное издание - Минск: Белорусский национальный технический университет, 2012, 152 с, с.47-51).
Также, предварительно создают паспорт маршрута движения ТС с указанием высот точек h, которые оно проходит в процессе движения, от остальных координат его местоположения на маршруте или от расстояния, пройденного им с начала маршрута. Паспорт маршрута можно создавать с использованием современных средств навигации и позиционирования: навигационных систем (GPS, ГЛОНАСС) и электронных карт местности.
В модифицированном способе с учетом потенциальной энергии в каждый момент времени определяют координаты местоположения ТС на маршруте или расстояние, пройденное им с начала маршрута. Далее по текущей скорости ТС и/или другим параметрам и характеристикам его движения находят ожидаемый тормозной путь и точку остановки в предположении, что торможение начнется немедленно. По паспорту маршрута определяют высоту h0 в текущей точке и высоту hstop в предполагаемой точке остановки, считая, что торможение начнется немедленно. Затем находят приращение потенциальной энергии ΔEpotent транспортного средства в предположении его остановки в рассчитанной точке из выражения:
 где g - гравитационная постоянная.
где g - гравитационная постоянная.
Затем определяют разность

или

которую подают на вход регулятора суммарной мощности источников энергии Pzg и получают на выходе этого регулятора величину Pzg. Причем если указанная разность принимает отрицательные значения, то задают Pzg равной нулю.
Таким образом, при формировании мощности, генерируемой источниками энергии, учитывают и потенциальную, и кинетическую энергии, что позволяет повысить КПД рекуперации энергии, комфортность и безопасность управления ТС и езды на нем.
Приведенное выше описание варианта осуществления дает возможность специалистам в данной области реализовать или использовать данное изобретение. Специалистам в данной области техники очевидны различные модификации данного способа, при этом определенные в нем общие принципы можно применить для управления различными вариантам КТЭО широкого спектра гибридных транспортных средств (дорожных, внедорожных, рельсовых, водных, летательных и т.п.) с ЭМТ различной конфигурации (электромобилей, транспортных средств на топливных элементах, солнечных батареях и т.д.), без необходимости использования дополнительного изобретательства. Например, если КТЭО транспортного средства содержит несколько ШПТ, с каждой из которых связаны свои МГ и ТЭД, то описанный способ в полной мере применим к каждой такой совокупности. Таким образом, настоящее изобретение не ограничивается показанным вариантом осуществления, а имеет широкий объем, соответствующий раскрытым принципам и новым признакам.
Изобретение относится к гибридным транспортным средствам с электромеханической трансмиссией. Способ согласованного управления электромеханической трансмиссией гибридного транспортного средства заключается
в том, что в каждый момент времени реализуют режим максимальной экономичности или максимальной динамичности работы трансмиссии. В режиме максимальной экономичности определяют энергию движения транспортного средства и коэффициент полезного действия рекуперации энергии в накопителе. В режиме максимальной динамичности задают пороговое значение требуемого суммарного электромагнитного момента тяговых электродвигателей или параметра движения/управления транспортного средства. Дополнительно определяют энергию, запасенную в накопителях, и регулируют задание суммарной мощности. Расширяются функциональные возможности управления. 8 з.п. ф-лы, 1 ил.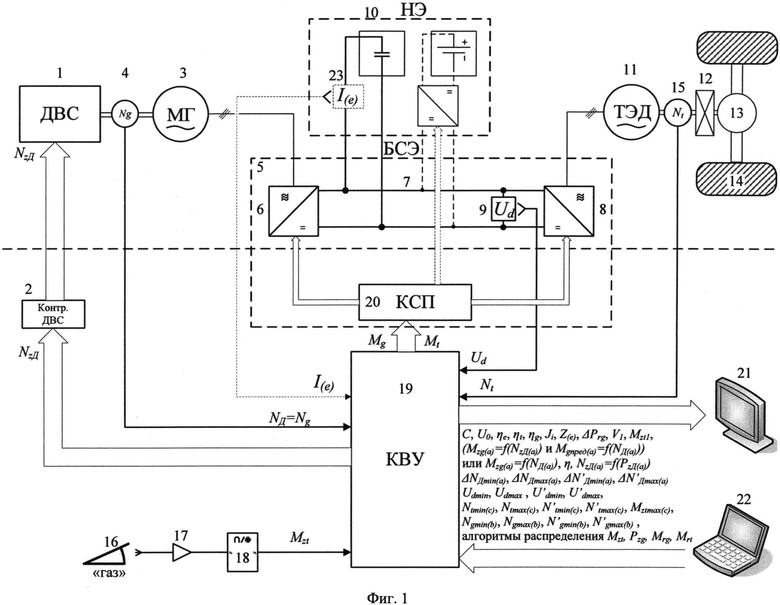
1. Способ согласованного управления электромеханической трансмиссией гибридного транспортного средства, включающей один источник энергии или более, один накопитель энергии или более, один или несколько тяговых электродвигателей и один или несколько электронных блоков, управляющие элементами электромеханической трансмиссии в отдельности и/или трансмиссией в целом, причем тяговые электродвигатели соединены с шиной постоянного тока через свои силовые преобразователи, а источники и накопители энергии соединены с шиной постоянного тока непосредственно или через свои силовые преобразователи, заключающийся в том, что в каждый момент времени реализуют режим максимальной экономичности или могут реализовывать режим максимальной динамичности работы трансмиссии или транспортного средства в целом, причем в режиме максимальной экономичности определяют энергию движения транспортного средства ETC и коэффициент полезного действия рекуперации энергии в накопителях η, при этом для накопителей, выполненных на основе суперконденсаторов, определяют квадрат напряжения на накопителе U2, равный  где С - емкость, a U0 - напряжение, соответствующее полному заряду накопителя, а для накопителей, выполненных не на основе суперконденсаторов, определяют максимальную энергию накопителей энергии Е0, энергию, запасенную в накопителях на текущий момент Е, энергию EZ, которую в текущий момент можно рекуперировать в накопители энергии, из выражения EZ=E0-E, и величину разности энергии ΔЕ из выражения ΔЕ=EZ-η·ETC, а в режиме максимальной динамичности могут предварительно задавать пороговое значение Mzt1 требуемого суммарного электромагнитного момента тяговых электродвигателей или параметра движения/управления транспортного средства, например скорости или кинетической энергии или степени нажатия педали акселератора, дополнительно определяют энергию, запасенную в накопителях Е1, необходимую для обеспечения этого режима, не превышающую Е0, и могут вводить режим максимальной динамичности, если E-E1≤0, или если превышено вышеуказанное заданное пороговое значение, или принудительно за счет воздействия на органы управления транспортным средством, и для реализации вышеуказанных режимов регулируют задание суммарной мощности Pzg, генерируемой источниками энергии таким образом, чтобы величина U2, ΔЕ, или E1-E соответственно, была нулевой или больше нуля на некоторую заданную величину, а если указанная величина меньше нуля, то задают суммарную мощность Pzg равной нулю, затем определяют необходимое для генерирования суммарной мощности Pzg количество источников энергии и обеспечивают их работу, реализуя задание суммарной мощности, генерируемой источниками энергии Pzg.
где С - емкость, a U0 - напряжение, соответствующее полному заряду накопителя, а для накопителей, выполненных не на основе суперконденсаторов, определяют максимальную энергию накопителей энергии Е0, энергию, запасенную в накопителях на текущий момент Е, энергию EZ, которую в текущий момент можно рекуперировать в накопители энергии, из выражения EZ=E0-E, и величину разности энергии ΔЕ из выражения ΔЕ=EZ-η·ETC, а в режиме максимальной динамичности могут предварительно задавать пороговое значение Mzt1 требуемого суммарного электромагнитного момента тяговых электродвигателей или параметра движения/управления транспортного средства, например скорости или кинетической энергии или степени нажатия педали акселератора, дополнительно определяют энергию, запасенную в накопителях Е1, необходимую для обеспечения этого режима, не превышающую Е0, и могут вводить режим максимальной динамичности, если E-E1≤0, или если превышено вышеуказанное заданное пороговое значение, или принудительно за счет воздействия на органы управления транспортным средством, и для реализации вышеуказанных режимов регулируют задание суммарной мощности Pzg, генерируемой источниками энергии таким образом, чтобы величина U2, ΔЕ, или E1-E соответственно, была нулевой или больше нуля на некоторую заданную величину, а если указанная величина меньше нуля, то задают суммарную мощность Pzg равной нулю, затем определяют необходимое для генерирования суммарной мощности Pzg количество источников энергии и обеспечивают их работу, реализуя задание суммарной мощности, генерируемой источниками энергии Pzg.
2. Способ по п.1, в котором в качестве энергии движения транспортного средства ETC используют кинетическую энергию движения транспортного средства Ekinet.
3. Способ по п.1, в котором в качестве энергии движения транспортного средства ETC используют сумму Ekinet и приращения потенциальной энергии транспортного средства ΔEpotent между его текущим местоположением и местоположением его полной остановки, прогнозируемым в предположении, что торможение начнется немедленно.
4. Способ по п.1, в котором после выдачи сигнала на начало торможения транспортного средства обеспечивают рекуперацию запасенной кинетической энергии вращающихся масс тепловых двигателей и механически соединенных с ними мотор-генераторов Ekinet(b) на шину постоянного тока, причем в качестве энергии движения транспортного средства ETC используют величину, определяемую из выражения: 
где b - индекс, соответствующий номеру мотор-генератора,
a ηg - совокупный коэффициент полезного действия рекуперации энергии Ekinet(b) в накопителях энергии,
при этом один источник энергии или более представляет собой тепловой двигатель с механически соединенным с ним одним или несколькими мотор-генераторами.
5. Способ по п.1, в котором после выдачи сигнала на начало торможения транспортного средства запасенную кинетическую энергию вращающихся масс тепловых двигателей и механически соединенных с ними мотор-генераторов Ekinet(b) преобразуют в тепловую энергию в тепловых двигателях в процессе компрессионного торможения, прекращая подачу в них топлива, либо компенсируют ее выделение снижением расхода топлива, постепенно уменьшая требуемую скорость вращения соответствующих тепловых двигателей NzД(a), по заранее заданной зависимости NzД(a) от Ekinet(b), при этом один источник энергии или более представляет собой тепловой двигатель с механически соединенным с ним одним или несколькими мотор-генераторами.
6. Способ, по п.1, в котором дополнительно задают максимальную величину изменения задания суммарной мощности, генерируемой источниками энергии ΔPzg, а в каждый момент времени после определения Pzg обеспечивают такую работу электромеханической трансмиссии, чтобы задание Pzg, реализуемое в текущий момент времени, изменилось по сравнению с этим же заданием, определенным в предыдущий момент времени, не более чем на величину ΔPzg.
7. Способ, по п.1, в котором хотя бы один накопитель энергии является накопителем электрической энергии, причем в каждый момент времени определяют ток хотя бы одного накопителя электрической энергии I(е), и полное сопротивление между шиной постоянного тока и этим накопителем Z(e), а далее в качестве текущего напряжения этого накопителя энергии U(e), в том числе при определении энергии этого накопителя, используют значение напряжения, меньшее, чем текущее напряжение шины постоянного тока Ud, на величину I(e)·Z(e), где e - индекс, соответствующий номеру накопителя энергии.
8. Способ по п.1, в котором предварительно задают предельные значения напряжения шины постоянного тока и границы регулирования мощностей источников энергии и моментов тяговых электродвигателей по напряжению шины постоянного тока, предельные значения скорости вращения каждого тягового электродвигателя и границы регулирования его момента по скорости вращения, максимально допустимую величину их электромагнитных моментов, в каждый момент времени определяют скорость вращения Nt(c) каждого тягового электродвигателя, напряжение шины постоянного тока Ud, задают требуемую величину суммарного электромагнитного момента Mzt тяговых электродвигателей, которую распределяют по тяговым электродвигателям, определяя требуемый момент каждого из них Mzt(с), не превышающий его заданную максимально допустимую величину, далее определяют реализуемую величину суммарного электромагнитного момента Mrt тяговых электродвигателей, равную Mzt·k1, распределяют Mrt по тяговым электродвигателям, определяя реализуемый момент каждого из них Mrt(c), и создают электромагнитный момент Mt(c) каждого тягового электродвигателя, равный Mrt(c)·k2(с), определяют мощность каждого тягового электродвигателя Pt(c), равную Mrt(c)·k2(c)Nt(с), и величину суммарной мощности тяговых электродвигателей Pt, а после определения задания суммарной мощности, генерируемой источниками энергии Pzg, определяют величину суммарной мощности всех источников энергии Pg, равную Pzg·k3, определяют необходимое для ее генерирования количество источников энергии и обеспечивают их работу, реализуя на каждом находящемся в работе источнике энергии мощность Prg(b), причем

b - индекс, соответствующий номеру источника энергии,
с - индекс, соответствующий номеру тягового электродвигателя,
k1 - коэффициент ограничения суммарного момента тяговых электродвигателей по Ud,
k2(c) - коэффициент ограничения двигательного момента каждого тягового электродвигателя по Nt(c),
k3 - коэффициент ограничения суммарной мощности источников энергии по Ud,
значения коэффициентов k1, k2 и k3 лежат в интервале [0, 1] и выбираются в зависимости от того, генерирует ли соответствующее устройство энергию на шину постоянного тока или потребляет энергию от шины постоянного тока и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k1, k2 и k3 происходит в монотонно возрастающей или монотонно убывающей функции, соответствующей данному коэффициенту величины ограничивающего параметра
9. Способ, по любому из пп.1 или 8, в котором в качестве хотя бы одного источника энергии или более используют тепловой двигатель, причем с каждым тепловым двигателем механически соединен один или несколько мотор-генераторов, и в котором предварительно задают предельные значения напряжения шины постоянного тока и границы регулирования моментов мотор-генераторов по напряжению шины постоянного тока, предельные значения скорости вращения каждого мотор-генератора и границы регулирования его момента по скорости вращения, для каждого теплового двигателя задают зависимость требуемой величины скорости вращения от требуемой мощности NzД(a)=ƒ(PzД(a)), зависимость полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от требуемой Mzg(a)=ƒ(NzД(a)) или фактической Mzg(a)=ƒ(NД(a)) скорости его вращения, причем, если задают зависимость Mzg(a)=ƒ(NzД(a)), то дополнительно задают зависимость предельного полезного момента, который можно передать с данного теплового двигателя на приводимые от него мотор-генераторы, от фактической скорости его вращения Mgпред(a)=ƒ(NД(a)), в каждый момент времени определяют скорость вращения Ng(b) каждого мотор-генератора и фактическую скорость вращения NД(а) каждого теплового двигателя, а после определения Pzg задают мощность, которую должен обеспечить каждый находящийся в работе мотор-генератор Pzg(b), распределяют по тепловым двигателям требуемую величину суммарной мощности мотор-генераторов Pzg, задавая мощность, которую должен обеспечить каждый находящийся в работе тепловой двигатель PzД(a), по заданной для каждого теплового двигателя зависимости NzД(a)=ƒ(PzД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства определяют требуемую скорость его вращения NzД(a) и реализуют ее, определяют по заданной для каждого теплового двигателя зависимости Mzg(a)=ƒ(NzД(a)) или Mzg(a)=ƒ(NД(a)) или по определенным или заданным ранее параметрам или зависимостям параметров работы электромеханической трансмиссии транспортного средства суммарный электромагнитный момент Mzg(a), который должны обеспечить мотор-генераторы, приводимые от каждого а-го теплового двигателя, причем, если его определяют по зависимости Mzg(a)=ƒ(NzД(a)), то дополнительно определяют предельный электромагнитный момент Mgпред(a), который могут обеспечить мотор-генераторы, приводимые от каждого а-го теплового двигателя, по заданной для каждого теплового двигателя зависимости Mgпред(a)=ƒ(NД(a)), и если определенные Mzg(a) превышают Mgпред(a), то Mzg(a) задают равными Мgпред(а); далее определяют суммарный электромагнитный момент, который должны обеспечить все мотор-генераторы, входящие в электромеханическую трансмиссию Mzg=ΣMzg(a), и реализуемую величину суммарного электромагнитного момента всех мотор-генераторов Mrg, равную Mzg·k3, и распределяют ее по мотор-генераторам, определяя реализуемый электромагнитный момент Mrg(b) каждого из них, и создают электромагнитный момент каждого мотор-генератора, равный Mrg(b)·k4(b), причем
а - индекс, соответствующий номеру теплового двигателя,
b - индекс, соответствующий номеру мотор-генератора,
k3 - коэффициент ограничения суммарного момента мотор-генераторов по Ud,
k4(b) - коэффициент ограничения момента каждого мотор-генератора по Ng(b),
значения коэффициентов k3 и k4(b) лежат в интервале [0, 1] и выбираются в зависимости от того, генерирует ли соответствующее устройство энергию на шину постоянного тока или потребляет энергию от шины постоянного тока и от соответствующих каждому коэффициенту значений, лежащих внутри или вне заданных диапазонов, ограниченных соответствующими каждому коэффициенту минимальными и максимальными значениями и границами регулирования по ограничивающим параметрам, и изменение k3 и k4(b) происходит в монотонно возрастающей или монотонно убывающей функции соответствующей данному коэффициенту величины ограничивающего параметра.
| RU 2012124244 A, 20.12.2013 | |||
| RU 2010114407 A, 20.10.2011 | |||
| JP 2004282859 A, 07.10.2004 | |||
| US 2013138279 A1, 30.05.2013 |

