Настоящая заявка испрашивает приоритет по заявке на патент США №12/610,184, поданной 30 октября 2009 года, и приоритет по заявке на патент США №12/905,906, поданной 15 октября 2009 года, содержание которых включено в настоящее описание посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к электродвигателям и, в частности, к подвижным постоянным магнитам и/или немагнитным проводящим шунтирующим частям в роторе для переконфигурирования двигателя из асинхронного индукционного двигателя при запуске в синхронный двигатель для обеспечения эффективной работы.
УРОВЕНЬ ТЕХНИКИ
Предпочтительной формой электродвигателей являются индукционные бесщеточные двигатели переменного тока. Роторы индукционных двигателей содержат корпус (или короткозамкнутую обмотку наподобие "беличьей клетки"), вращающийся в статоре. Корпус содержит стержни, проходящие в осевом направлении и расположенные с угловыми интервалами на внешней периферии ротора. При подаче переменного тока на статор, он создает в нем вращающееся магнитное поле, индуктивно наводящее токи в стержнях. Затем ток, наведенный в стержнях, взаимодействует с аналогичным статорным магнитным полем для создания вращающего момента и обеспечения таким образом вращения двигателя.
Для наведения тока в стержнях ротора необходимо отсутствие их синхронного перемещения (или вращения) с вращением статорного магнитного поля, поскольку для электромагнитной индукции необходимо наличие относительного перемещения между магнитным полем и расположенным в нем проводником. В итоге, ротору необходимо совершать перемещение относительно вращающегося статорного магнитного поля для наведения тока в стержнях и таким образом создания вращающего момента, а индукционные двигатели вследствие этого представляют собой асинхронные двигатели.
К сожалению, маломощные индукционные двигатели не имеют высокой эффективности, потеря ее происходит при уменьшенных нагрузках, поскольку при малых нагрузках количество потребляемой статором мощности постоянно.
Один из способов увеличения эффективности индукционного двигателя состоит в добавлении к ротору постоянных магнитов. Первоначально запуск двигателя происходит аналогично запуску обычного индукционного двигателя, однако при достижении двигателем своей рабочей скорости статорное магнитное поле взаимодействует с постоянными магнитами для перехода в синхронный режим. К сожалению, размер у постоянных магнитов ограничен, поскольку слишком большие магниты препятствуют запуску двигателя. Такое ограничение по размерам ограничивает преимущество, полученное от введения постоянных магнитов.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение устраняет рассмотренные выше и другие недостатки путем создания реконфигурируемого электродвигателя, содержащего ротор с поворотными постоянными магнитами или немагнитными проводящими шунтирующими частями. Магниты и/или шунтирующие части имеют первое положение, создающее слабое магнитное поле для обеспечения работы индукционного двигателя в асинхронном режиме при запуске, и второе положение, создающее сильное магнитное поле для обеспечения эффективной работы в синхронном режиме. Двигатель содержит короткозамкнутую обмотку для работы индукционного двигателя при запуске с постоянными магнитами и/или шунтирующими частями, расположенными для создания слабого магнитного поля, не мешающего запуску. При приближении или достижении двигателем синхронной частоты вращения, постоянные магниты и/или шунтирующие части вращаются для создания сильного магнитного поля с обеспечением высокоэффективной работы в синхронном режиме. Положение магнитов и/или шунтирующих частей может быть отрегулировано посредством центробежного приспособления, или вязкое демпфирование может задерживать поворот магнитов и/или шунтирующих частей, или устройство с электрическим управлением может управлять положениями магнитов и/или шунтирующей части.
Согласно одному из вариантов настоящего изобретения предложен реконфигурируемый бесщеточный электродвигатель переменного тока, запускаемый в асинхронном режиме с последующим переходом в более эффективный синхронный режим. Двигатель содержит статор, принимающий сигнал переменного тока и создающий вращающееся статорное магнитное поле, и ротор, взаимодействующий с вращающимся статорным магнитным полем. Ротор содержит стержни, формирующие конструкцию короткозамкнутой обмотки для индукционного взаимодействия с вращающимся статорным магнитным полем с обеспечением асинхронного режима для запуска двигателя, и по меньшей мере один поворотный постоянный магнит для обеспечения эффективной работы в синхронном режиме. Постоянный магнит расположен в роторе и магнитно взаимодействует с полюсными наконечниками. Постоянный магнит имеет первое положение, приводящее к созданию слабого магнитного поля для обеспечения возможности запуска индукционного двигателя, и второе положение, приводящее к созданию сильного магнитного поля для взаимодействия с вращающимся статорным магнитным полем с обеспечением эффективной работы в синхронном режиме.
Согласно еще одному варианту настоящего изобретения обеспечен реконфигурируемый синхронно-асинхронный электродвигатель с магнитным контуром, содержащим поворотные цилиндрические магниты или один поворотный полый цилиндрический магнит. Постоянные магниты могут иметь первое положение, создающее слабое магнитное поле для обеспечения работы в асинхронном режиме, и второе положение, создающее сильное магнитное поле для обеспечения работы в синхронном режиме.
Согласно еще одному варианту настоящего изобретения обеспечен реконфигурируемый синхронно-асинхронный электродвигатель с магнитным контуром, содержащим поворотные немагнитные проводящие шунтирующие части или одну из поворотных полых цилиндрических немагнитных проводящих шунтирующих частей. Немагнитные проводящие шунтирующие части имеют первое положение, препятствующее посредством магнитного контура созданию слабого магнитного поля, и второе положение, незначительно препятствующее посредством магнитного контура созданию сильного магнитного поля.
Согласно еще одному варианту настоящего изобретения предложено центробежное зажимное приспособление, удерживающее постоянный магнит в положении слабого магнитного поля при запуске и до достижения частоты вращения, достаточной для перехода в синхронный режим работы. Центробежное зажимное приспособление, приведенное в качестве примера, содержит пружины, удерживающие штифты, взаимодействующие с поворотными постоянными магнитами, и грузы, преодолевающие пружины при частоте вращения, достаточной для освобождения магнитов.
Согласно еще одному варианту изобретения предложен вязкий демпфирующий материал, например силикон, окружающий поворотные постоянные магниты для предотвращения их поворота или расположенный в камере, окружающей лопасти, прикрепленные к поворотным магнитам, для поддержания слабого магнитного поля при асинхронном запуске. Через некоторое время магниты совершают поворот с обеспечением сильного магнитного поля для эффективной работы в синхронном режиме.
Согласно еще одному варианту изобретения предложено электромеханическое устройство для управления положением магнитов и/или немагнитных проводящих шунтирующих частей. Управление электромеханическим устройством может происходить посредством процессора для обеспечения оптимально магнитного поля для текущего состояния электродвигателя. Например, вследствие нагрузки на двигатель двигатель достигает синхронной скорости вращения, а при увеличении нагрузки происходит уменьшение частоты вращения двигателя, причем электромеханическое устройство может уменьшать магнитное поле для обеспечения перехода или возврата двигателя в синхронный режим работы. Такие электромеханические устройства обычно могут быть использованы в больших и/или дорогостоящих двигателях.
Согласно еще одному варианту изобретения предложены способы регулирования магнитного поля в двигателе и/или генераторе для обеспечения эффективной работы в широком диапазоне частот вращения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Вышеописанные и другие варианты, особенности и преимущества настоящего изобретения будут более очевидны из приведенного далее его описания, составленного согласно прилагаемым чертежам.
На фиг.1 показан вид сбоку реконфигурируемого электродвигателя согласно настоящему изобретению.
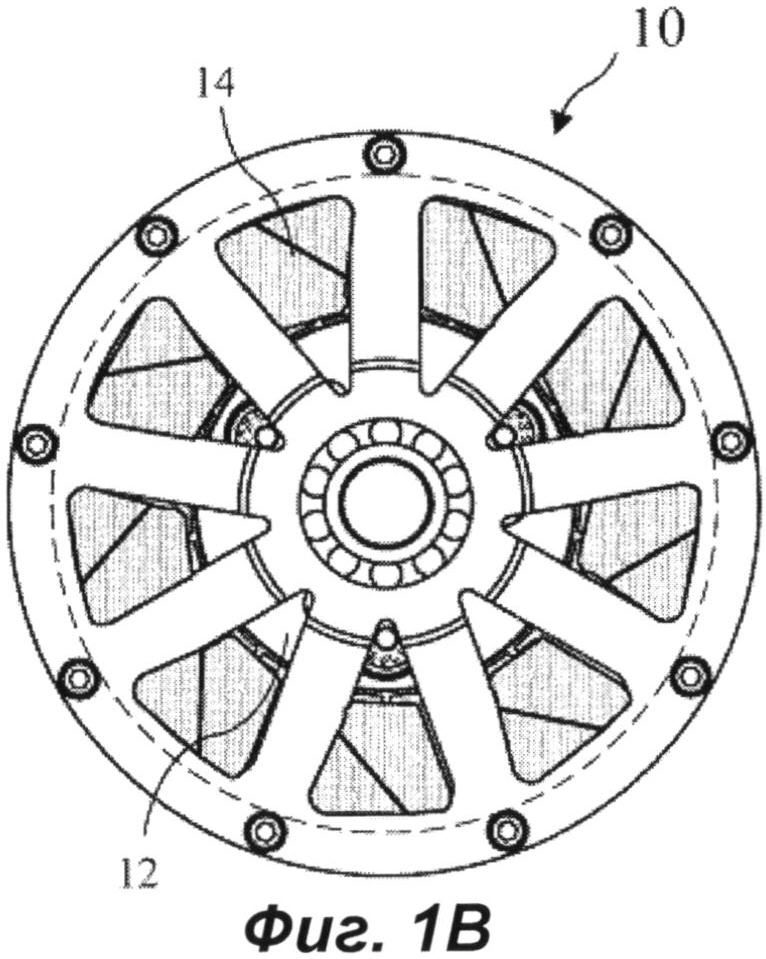
На фиг.1В показан вид с торца реконфигурируемого электродвигателя.
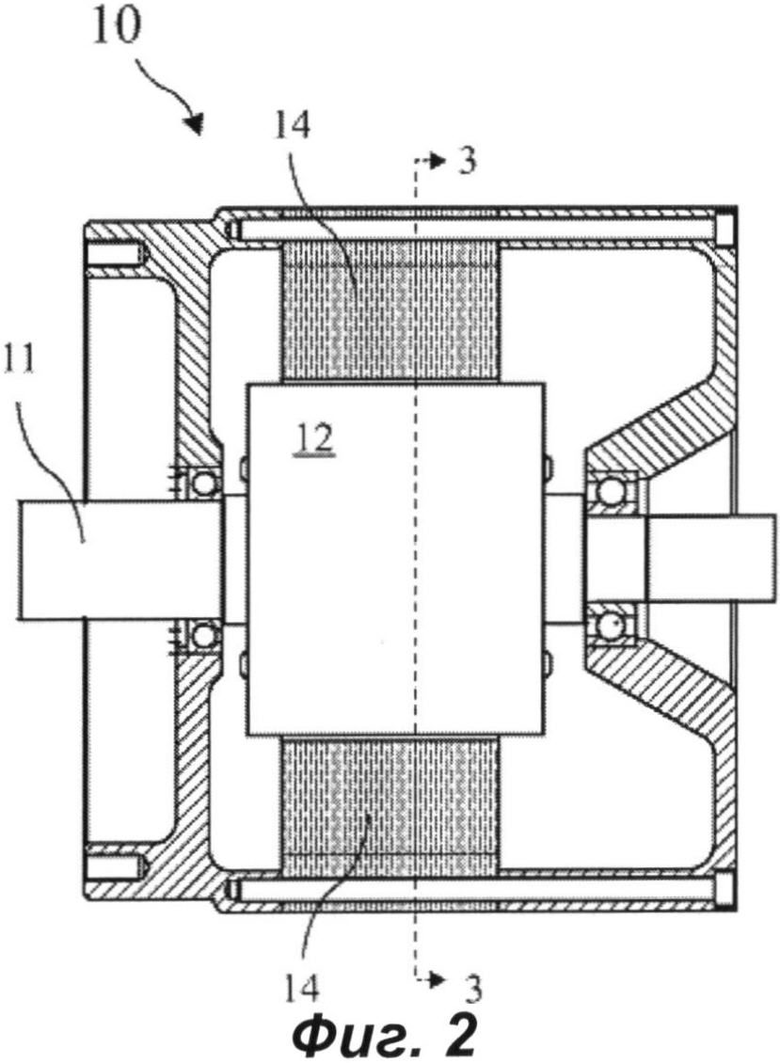
На фиг.2 показан разрез по линии 2-2 (фиг.1А) реконфигурируемого электродвигателя согласно настоящему изобретению.
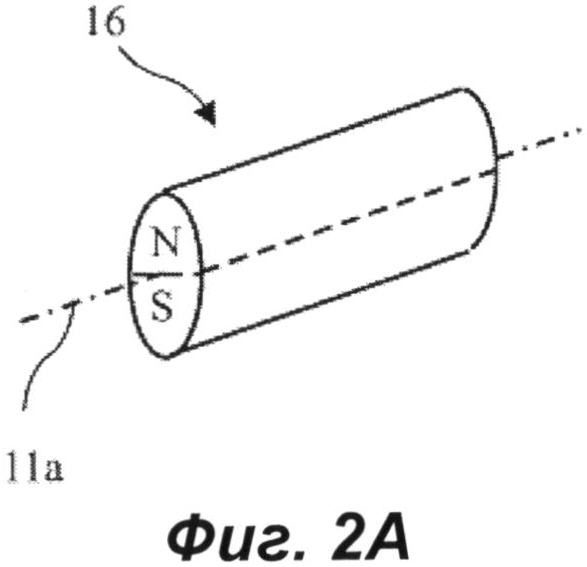
На фиг.2А показан обычный двухполюсный постоянный магнит согласно настоящему изобретению.
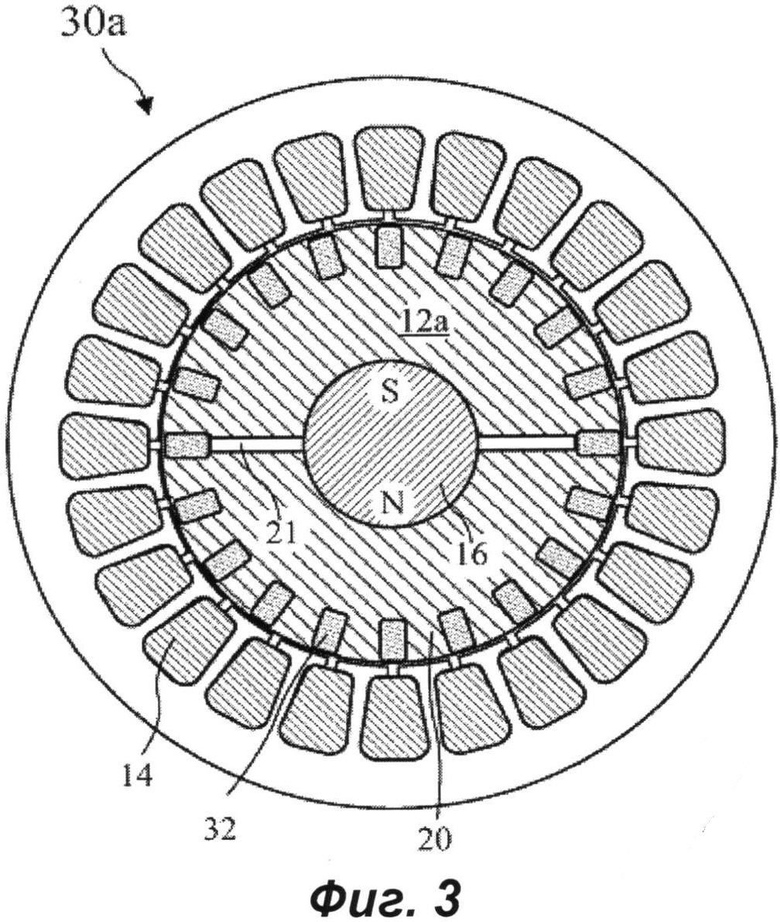
На фиг.3 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним двухполюсным постоянным магнитом в роторе с радиально выравненной конструкцией.
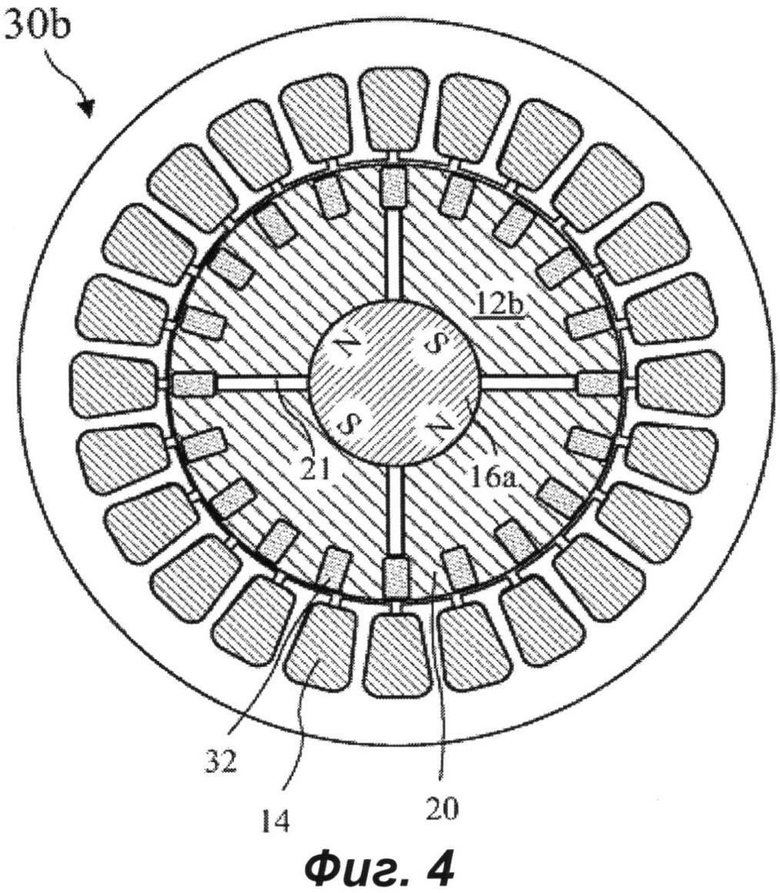
На фиг.4 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним четырехполюсным постоянным магнитом, расположенным в роторе с радиально выравненной конструкцией.
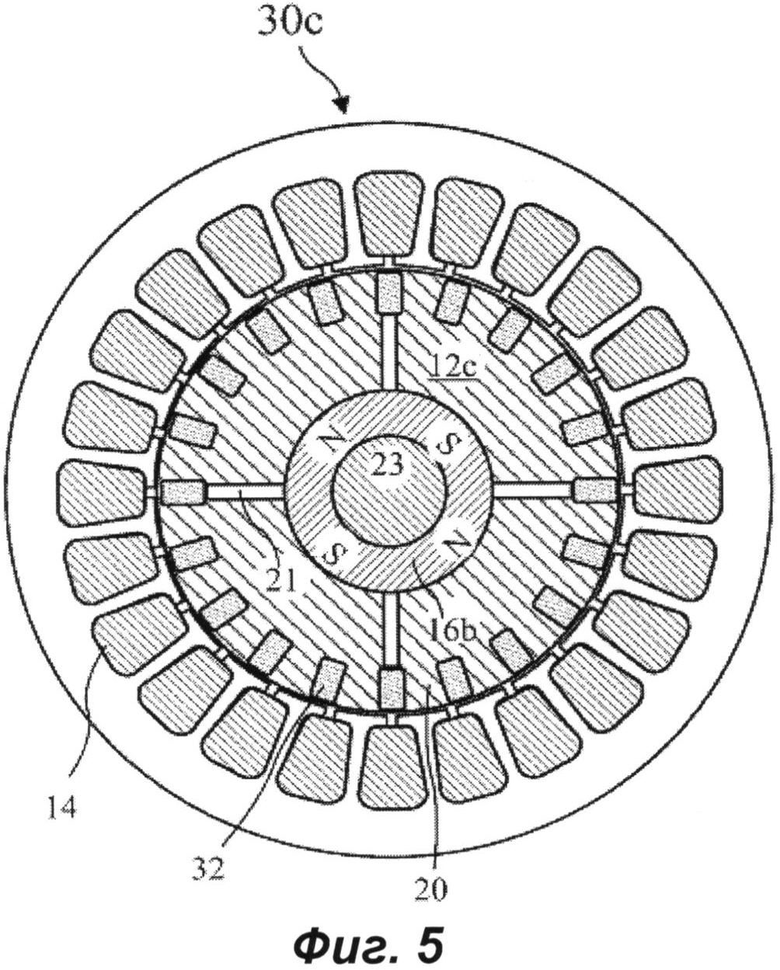
На фиг.5 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним четырехполюсным полым постоянным магнитом в роторе с радиально выравненной конструкцией.
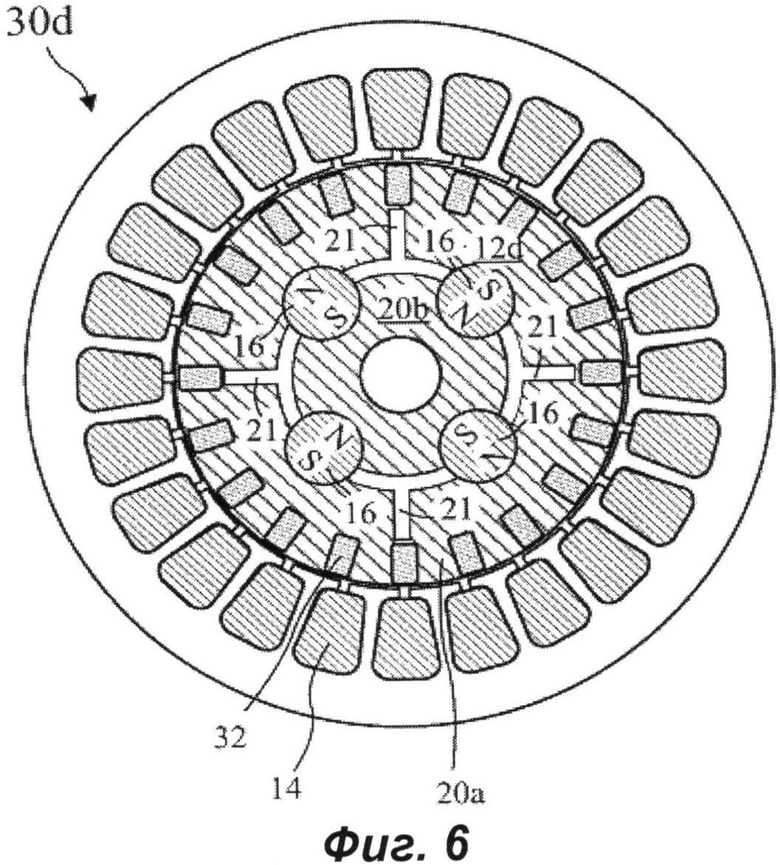
На фиг.6 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами в роторе с радиально выравненной конструкцией.
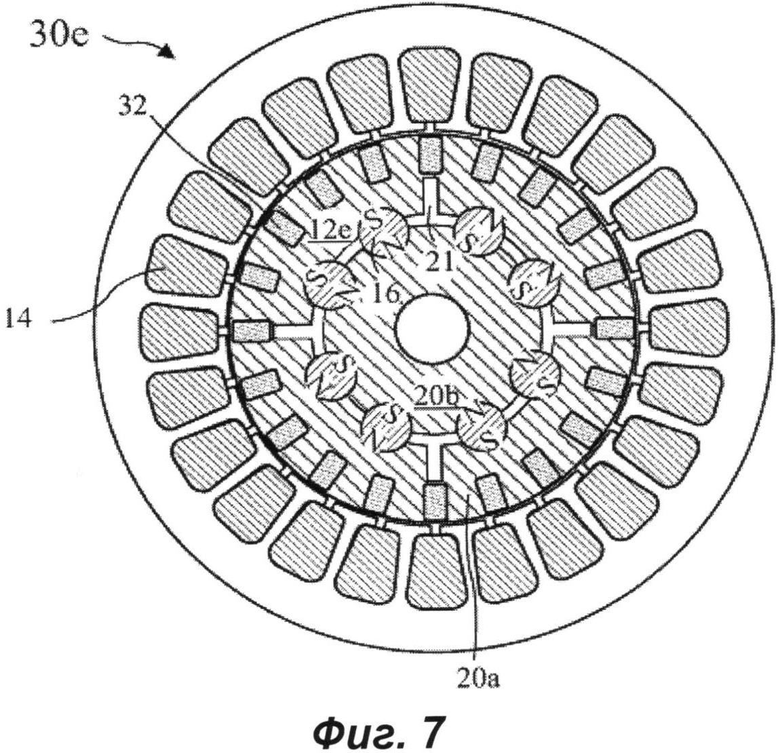
На фиг.7, согласно настоящему изобретению, показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя парами постоянных магнитов в роторе радиально выравненной конструкцией.
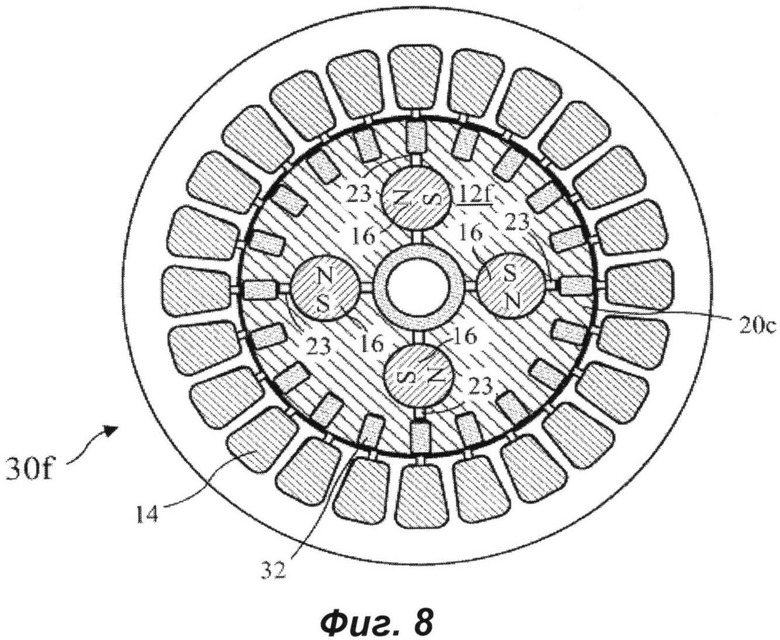
На фиг.8 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока.
На фиг.9А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним постоянным магнитом, повернутым для обеспечения минимального магнитного поля в роторе с радиально выравненной конструкцией.
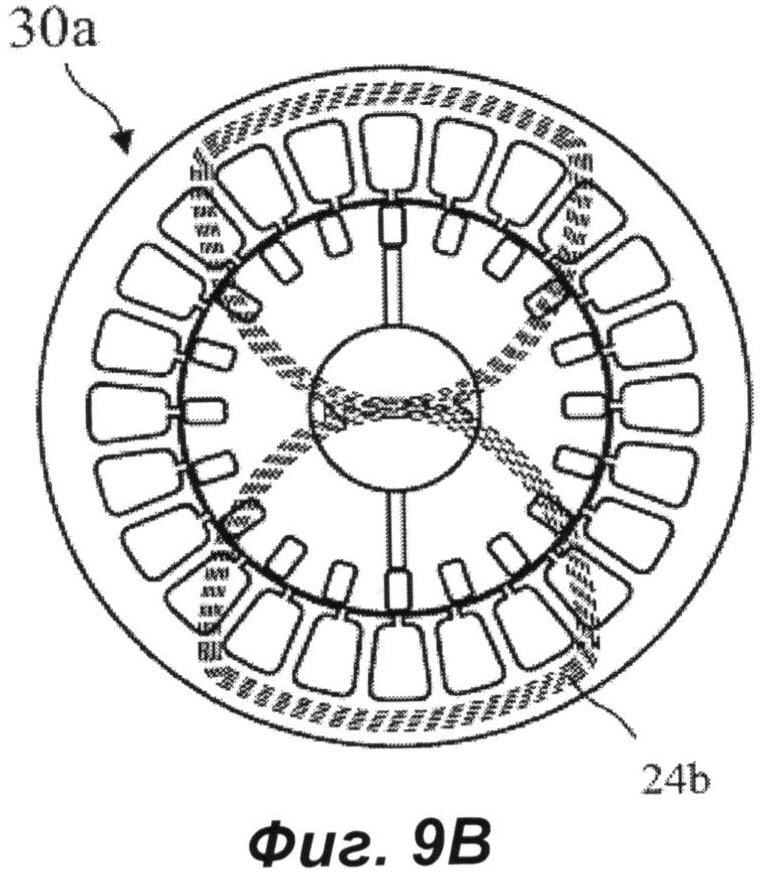
На фиг.9В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним постоянным магнитом, повернутым для обеспечения максимального магнитного поля в роторе с радиально выравненной конструкцией.
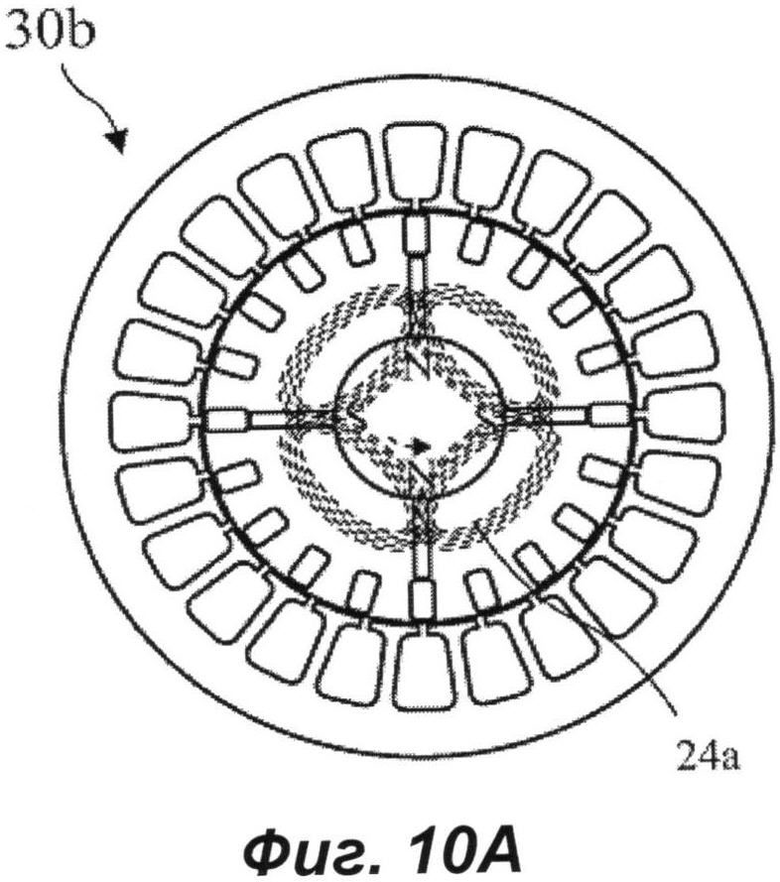
На фиг.10А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним четырехполюсным постоянным магнитом, повернутым для обеспечения минимального магнитного поля в роторе с радиально выравненной конструкцией.
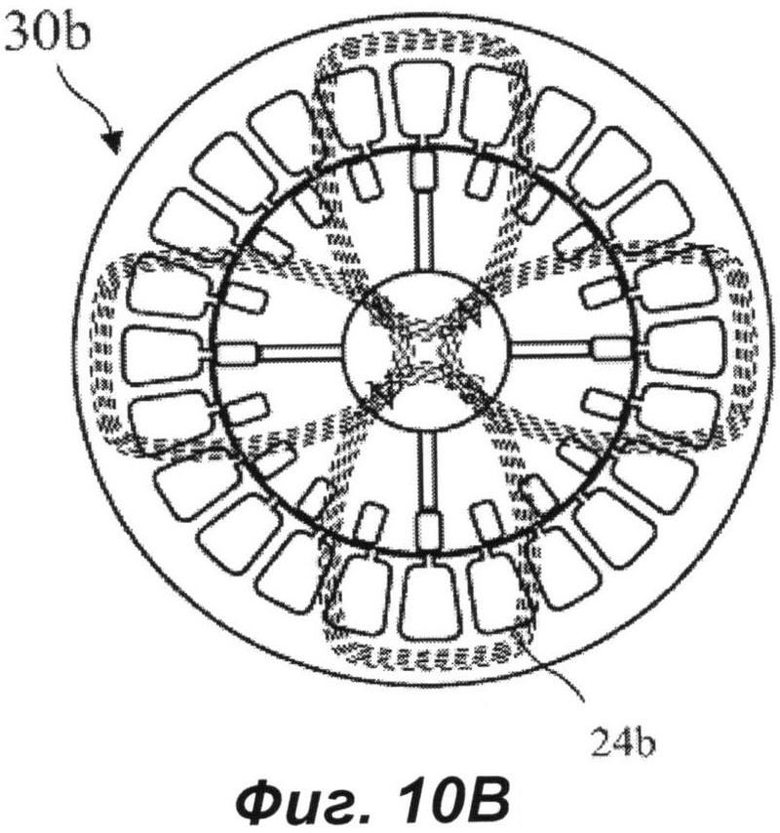
На фиг.10В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним четырехполюсным постоянным магнитом, повернутым для обеспечения максимального магнитного поля в роторе с радиально выравненной конструкцией.
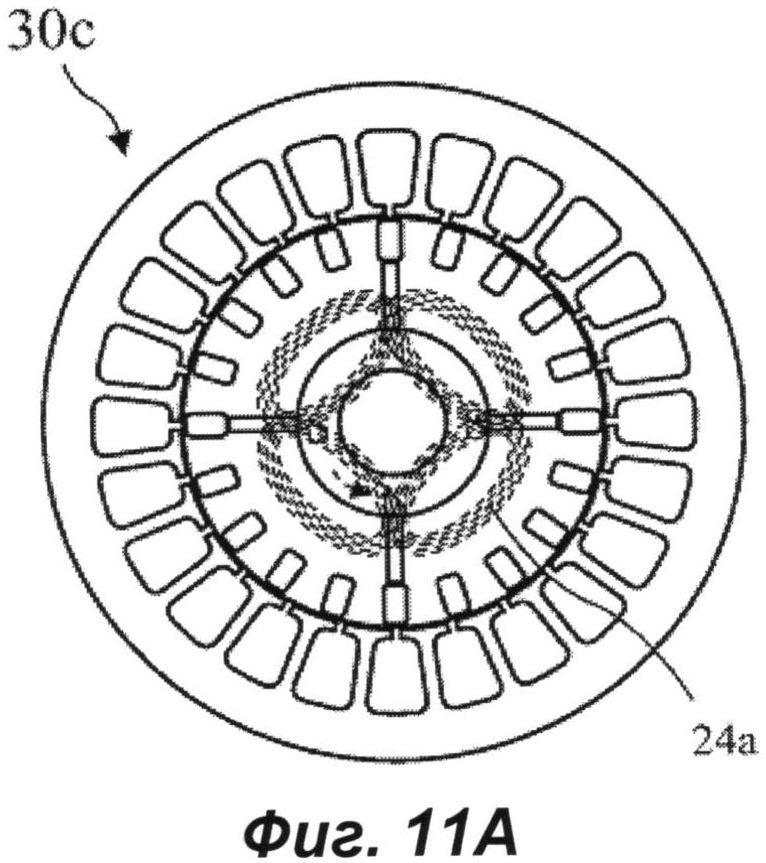
На фиг.11А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним полым четырехполюсным постоянным магнитом, повернутым для обеспечения минимального магнитного поля в роторе с радиально выравненной конструкцией.
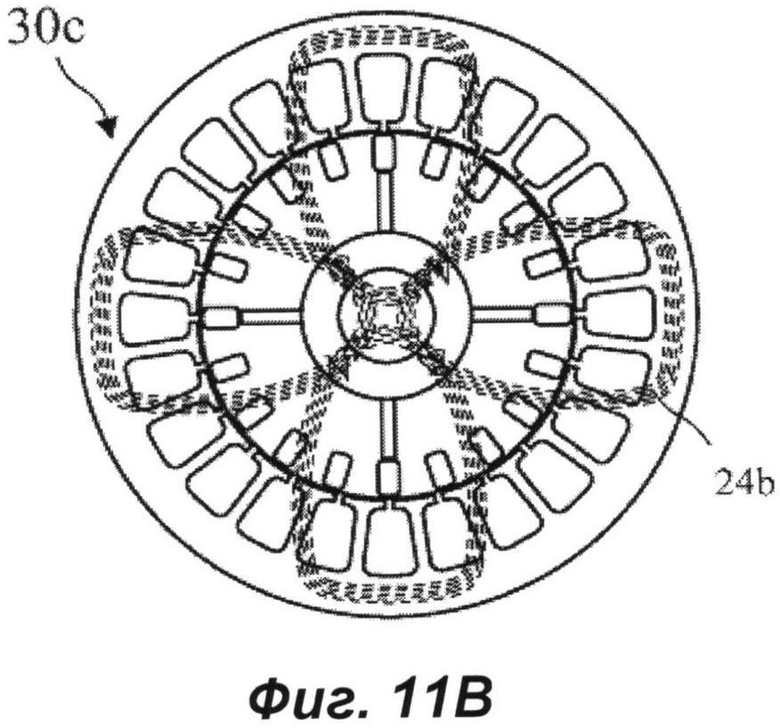
На фиг.11В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с одним полым четырехполюсным постоянным магнитом, повернутым для обеспечения максимального магнитного поля в роторе с радиально выравненной конструкцией.
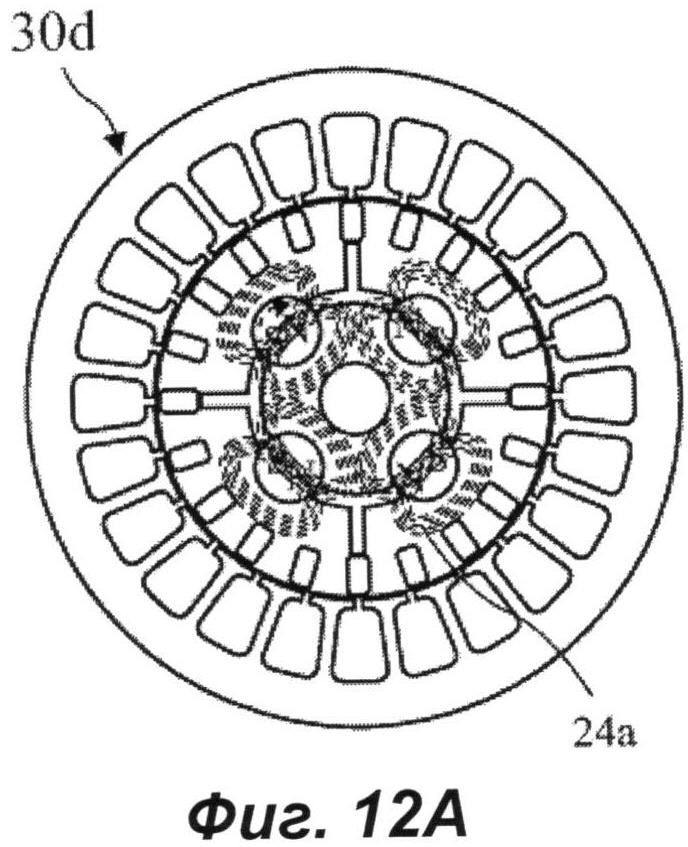
На фиг.12А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами, повернутыми для обеспечения минимального магнитного поля в роторе с радиально выравненной конструкцией.
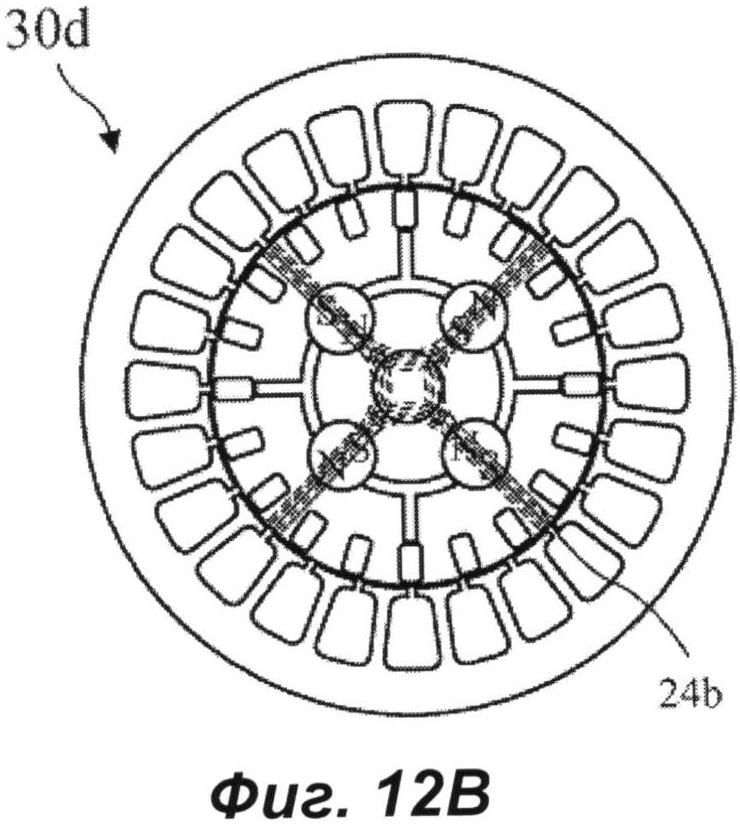
На фиг.12В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами, повернутыми для обеспечения максимального магнитного поля в роторе с радиально выравненной конструкцией.
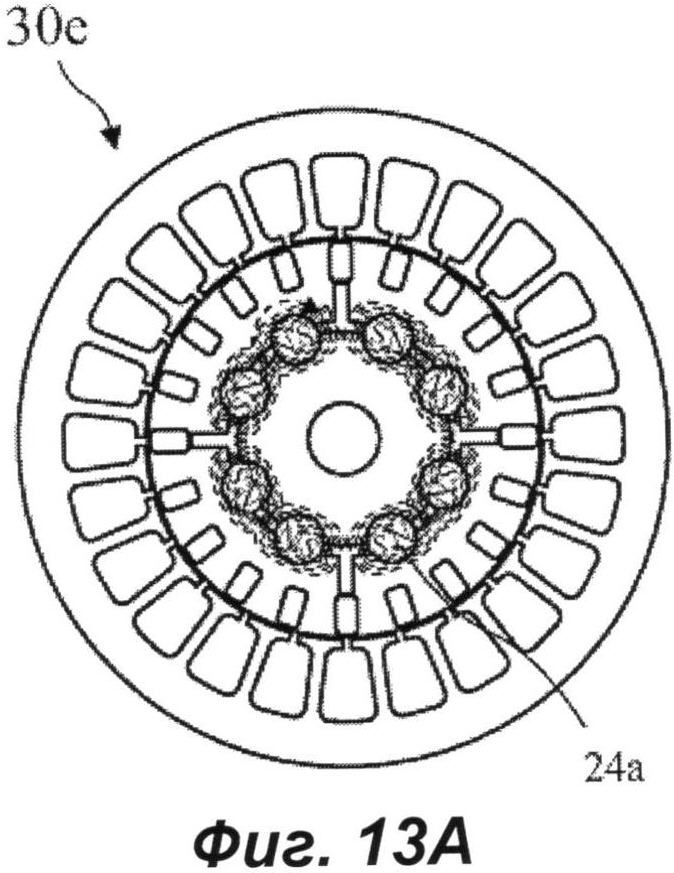
На фиг.13А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя парами постоянных магнитов, повернутых для обеспечения минимального магнитного поля в роторе с радиально выравненной конструкцией.
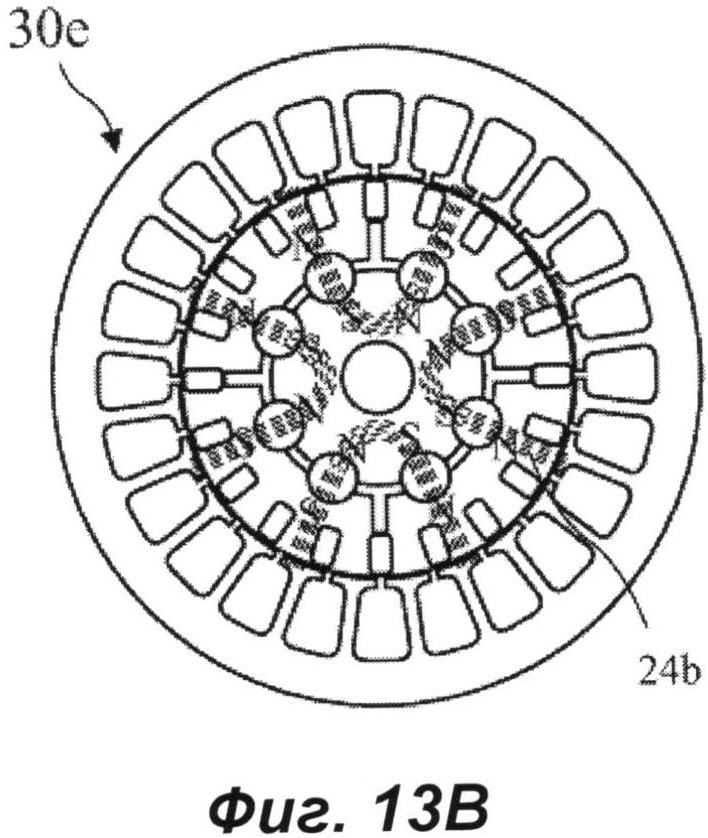
На фиг.13В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя парами постоянных магнитов, повернутых для обеспечения максимального магнитного поля в роторе с радиально выравненной конструкцией.
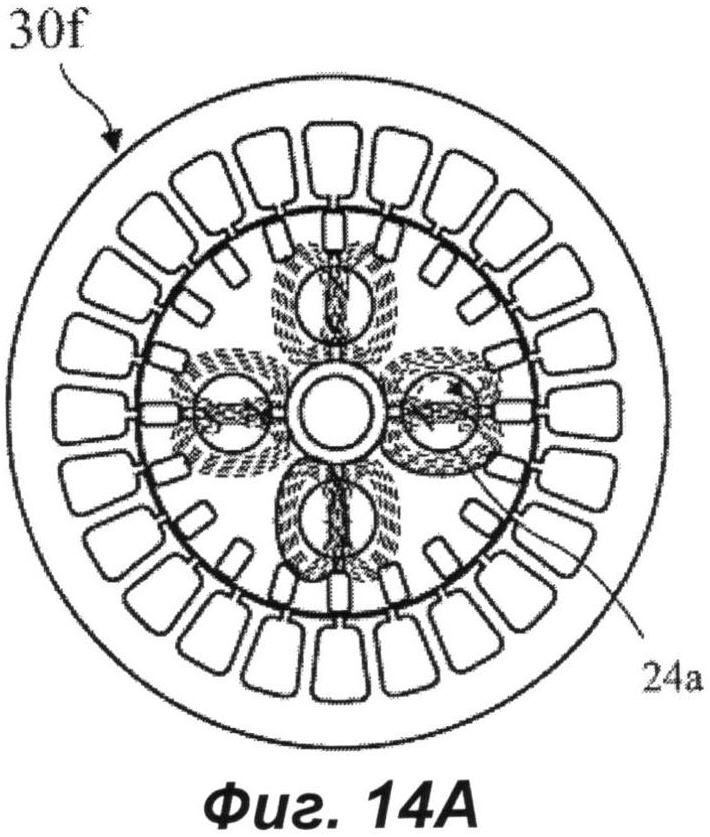
На фиг.14А согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами, повернутыми для обеспечения минимального магнитного поля в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока.
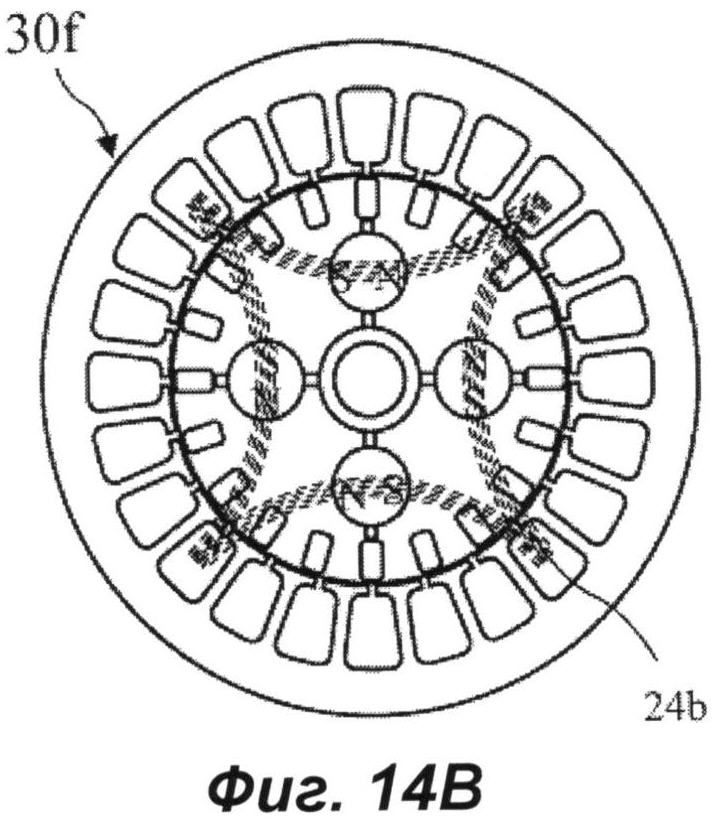
На фиг.14В согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) реконфигурируемого электродвигателя с четырьмя постоянными магнитами, повернутыми для обеспечения максимального магнитного поля в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока.
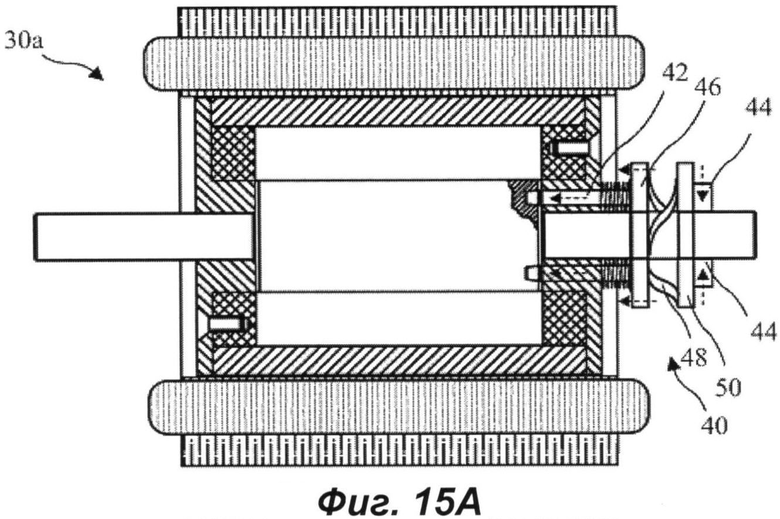
На фиг.15А согласно настоящему изобретению показан разрез реконфигурируемого электродвигателя с центробежным зажимным приспособлением, удерживающим один постоянный магнит в положении минимального магнитного поля.
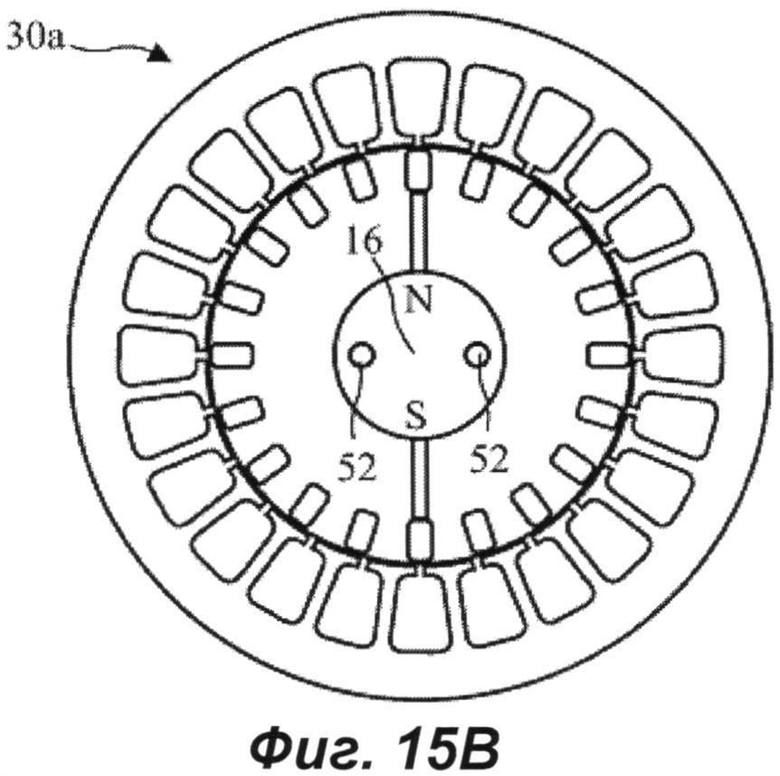
На фиг.15В согласно настоящему изобретению показан вид с торца реконфигурируемого электродвигателя с центробежным зажимным приспособлением, удерживающим один постоянный магнит в положении минимального магнитного поля.
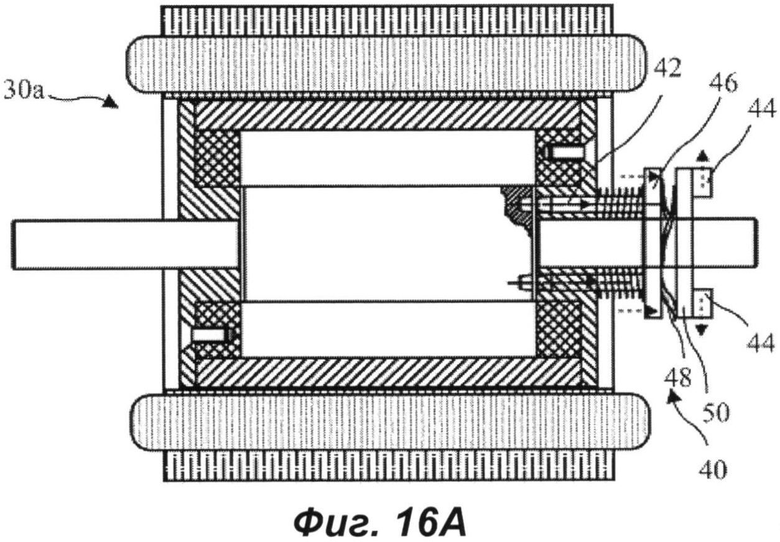
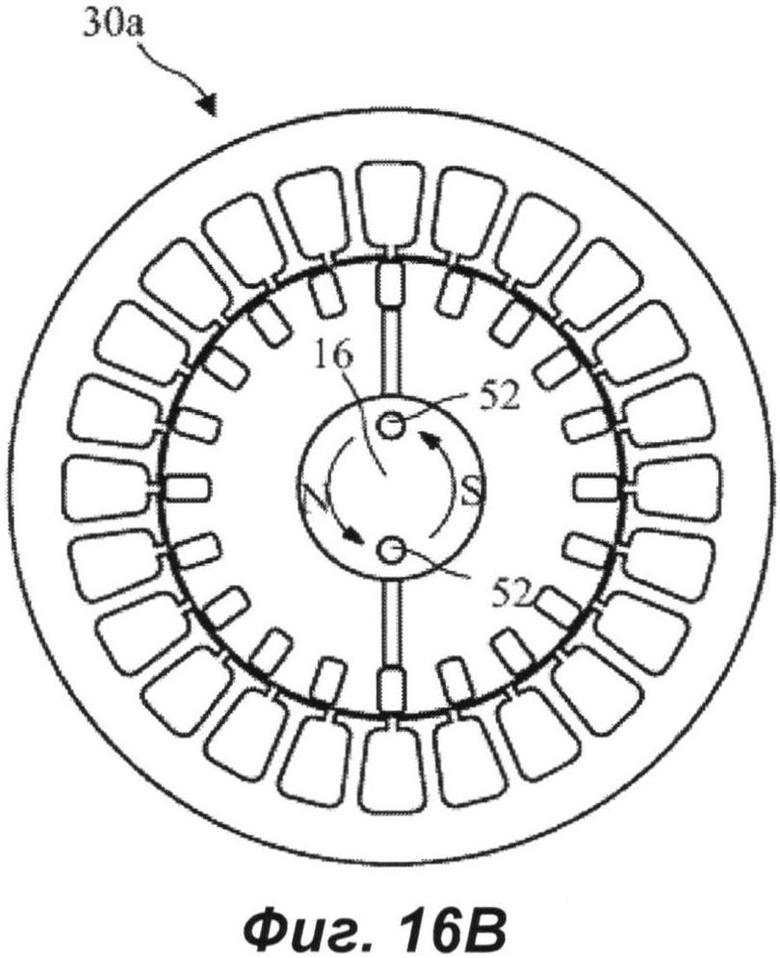
На фиг.16А согласно настоящему изобретению показан вид сбоку в разрезе реконфигурируемого электродвигателя с центробежным зажимным приспособлением, освобождающим один постоянный магнит в положение максимального магнитного поля.
На фиг.16В согласно настоящему изобретению показан вид с торца реконфигурируемого электродвигателя с центробежным зажимным приспособлением, освобождающим один постоянный магнит в положение максимального магнитного поля.
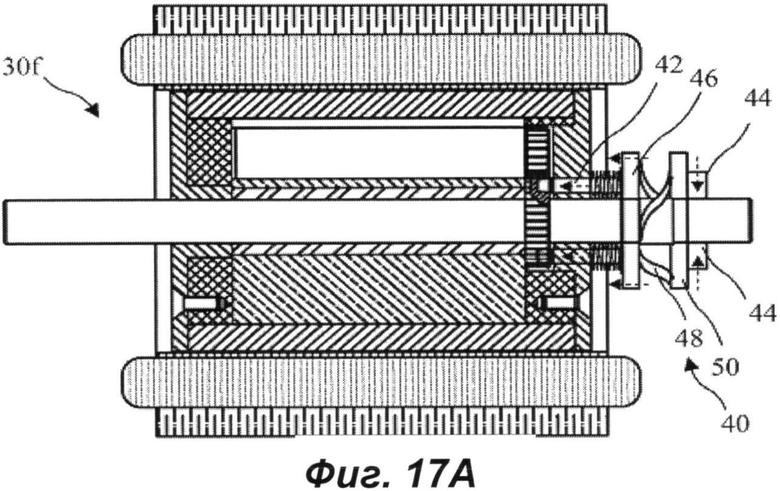
На фиг.17А согласно настоящему изобретению показан вид сбоку в разрезе реконфигурируемого электродвигателя с центробежным зажимным приспособлением, удерживающим четыре постоянных магнита в положении минимального магнитного поля.
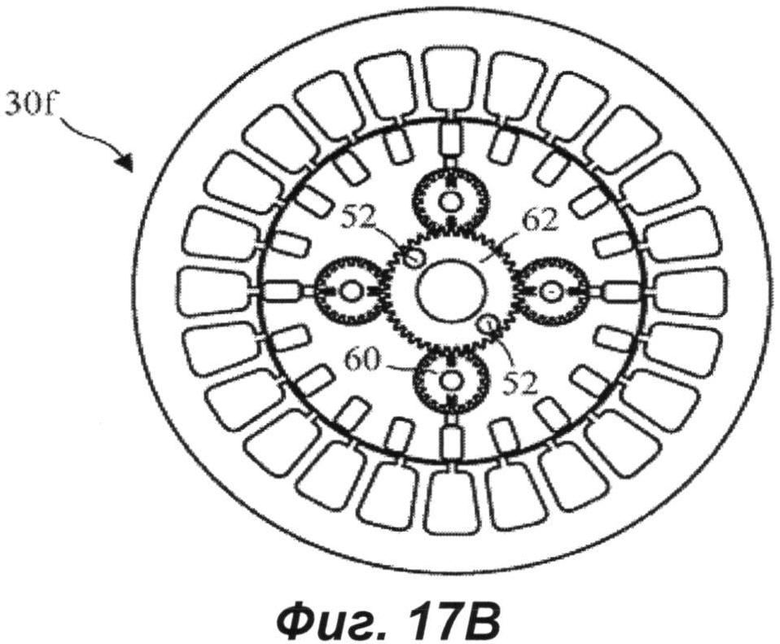
На фиг.17В согласно настоящему изобретению показан вид с торца реконфигурируемого электродвигателя с центробежным зажимным приспособлением, удерживающим четыре постоянных магнита в положении минимального магнитного поля.
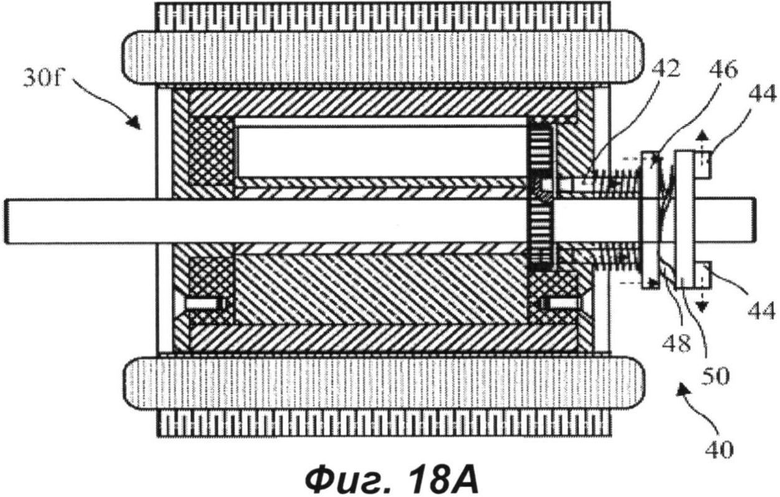
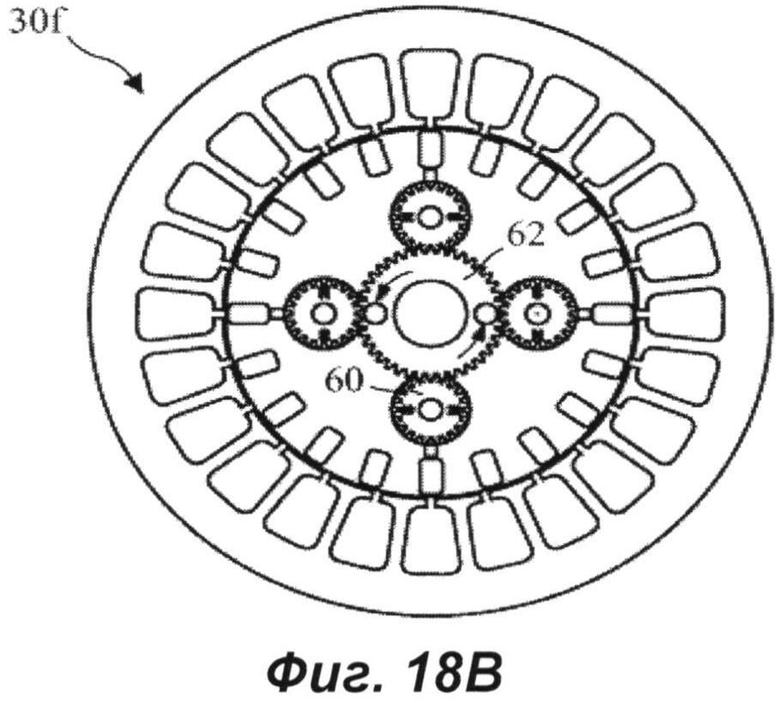
На фиг.18А согласно настоящему изобретению показан вид сбоку в разрезе реконфигурируемого электродвигателя с центробежным зажимным приспособлением, освобождающим четыре постоянных магнита в положение максимального магнитного поля.
На фиг.18В согласно настоящему изобретению показан вид с торца реконфигурируемого электродвигателя с центробежным зажимным приспособлением, освобождающим четыре постоянных магнита в положение максимального магнитного поля.
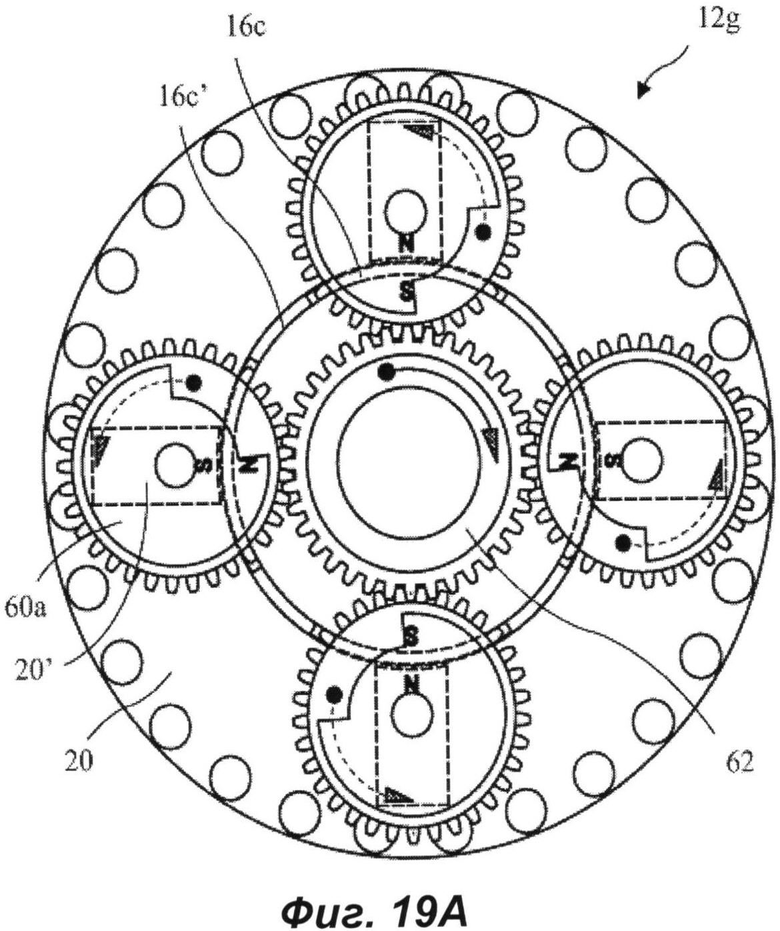
На фиг.19А согласно настоящему изобретению показан вид с торца ротора реконфигурируемого электродвигателя с центробежным зажимным приспособлением, поворачивающим четырехполюсный постоянный магнит в положение минимального магнитного поля.
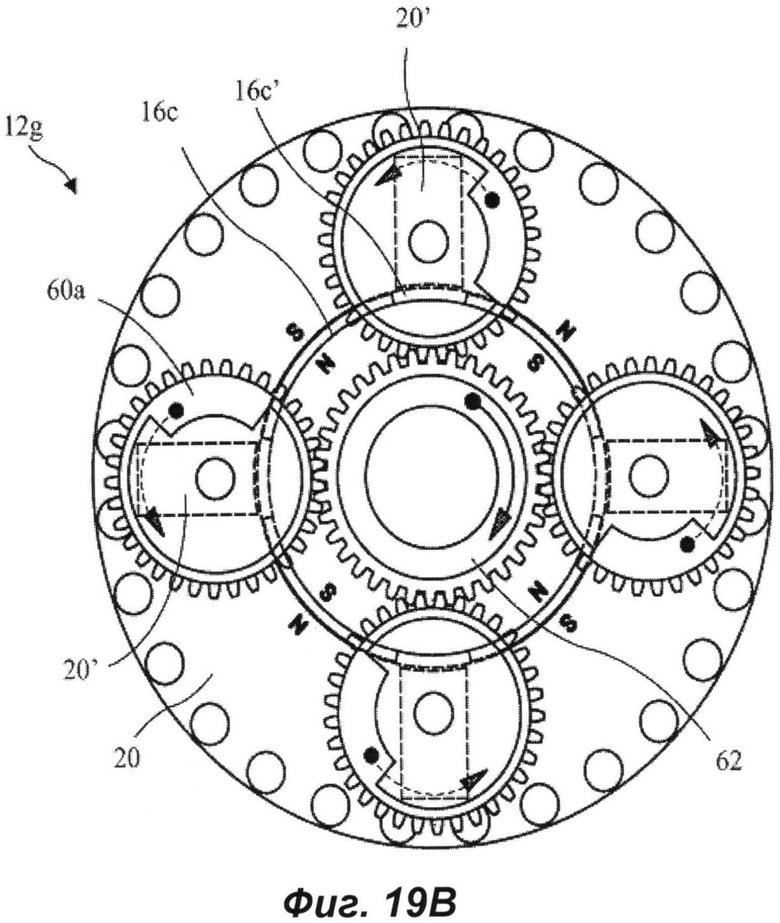
На фиг.19В согласно настоящему изобретению показан вид с торца ротора реконфигурируемого электродвигателя с центробежным зажимным приспособлением, поворачивающим четырехполюсный постоянный магнит в положение максимального магнитного поля.
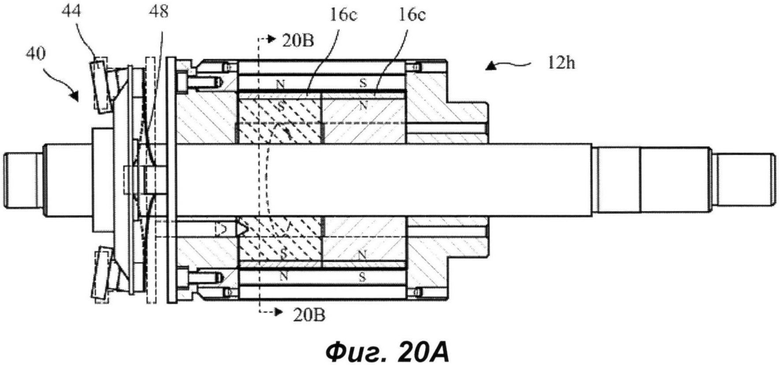
На фиг.20А согласно настоящему изобретению показан вид сбоку в разрезе реконфигурируемого ротора с соединенными встык на половину длины магнитами, смещенными для обеспечения слабого магнитного поля.
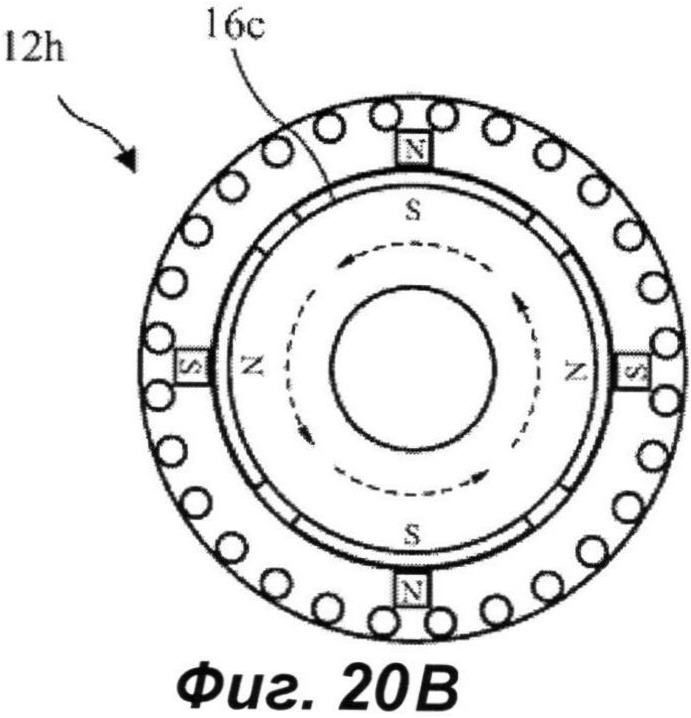
На фиг.20В согласно настоящему изобретению показан разрез по линии 20В-20В (фиг.20А) реконфигурируемого ротора с соединенными встык на половину длины магнитами, смещенными для обеспечения слабого магнитного поля.
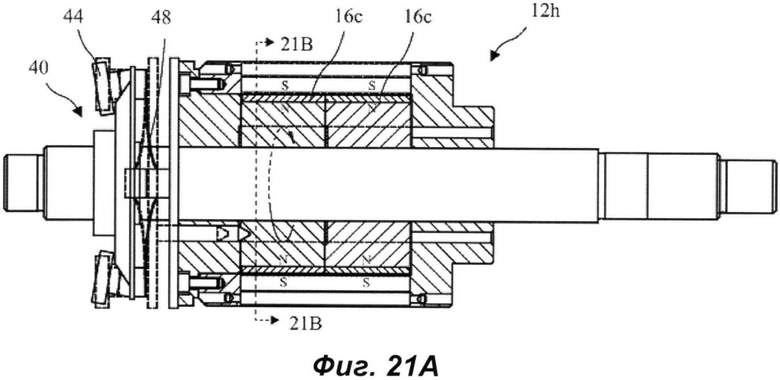
На фиг.21А согласно настоящему изобретению показан вид сбоку в разрезе реконфигурируемого ротора с соединенными встык на половину длины магнитами, выравненными для обеспечения сильного магнитного поля.
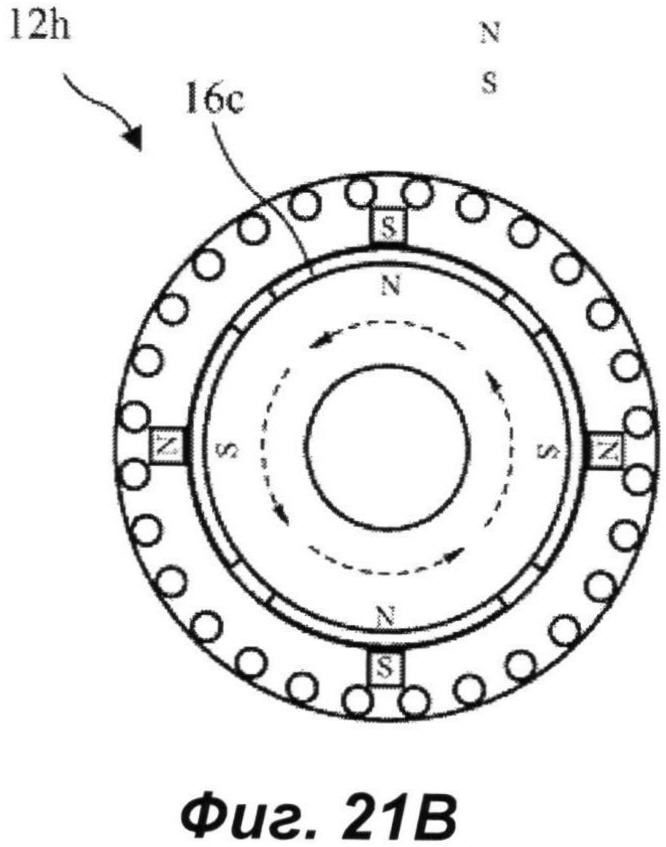
На фиг.21В согласно настоящему изобретению показан разрез по линии 21В-21В (фиг.21А) реконфигурируемого ротора с соединенными встык на половину длины магнитами, выравненными для обеспечения сильного магнитного поля.
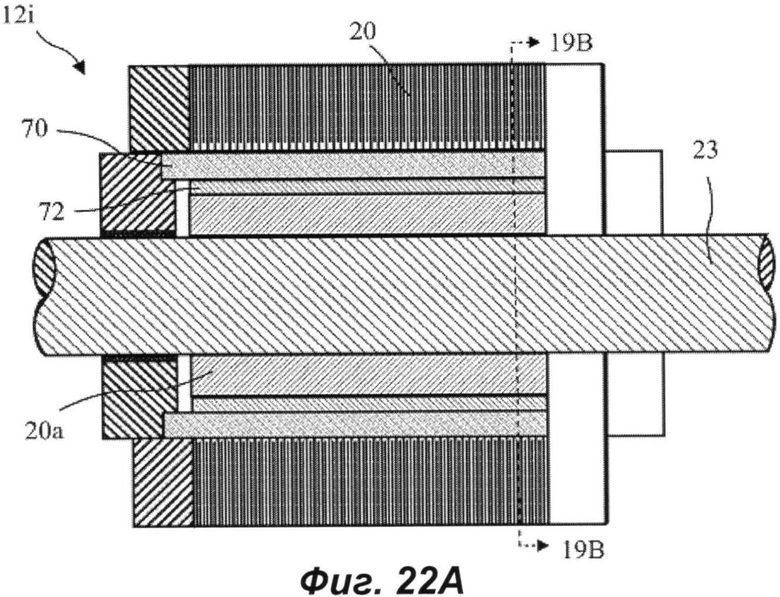
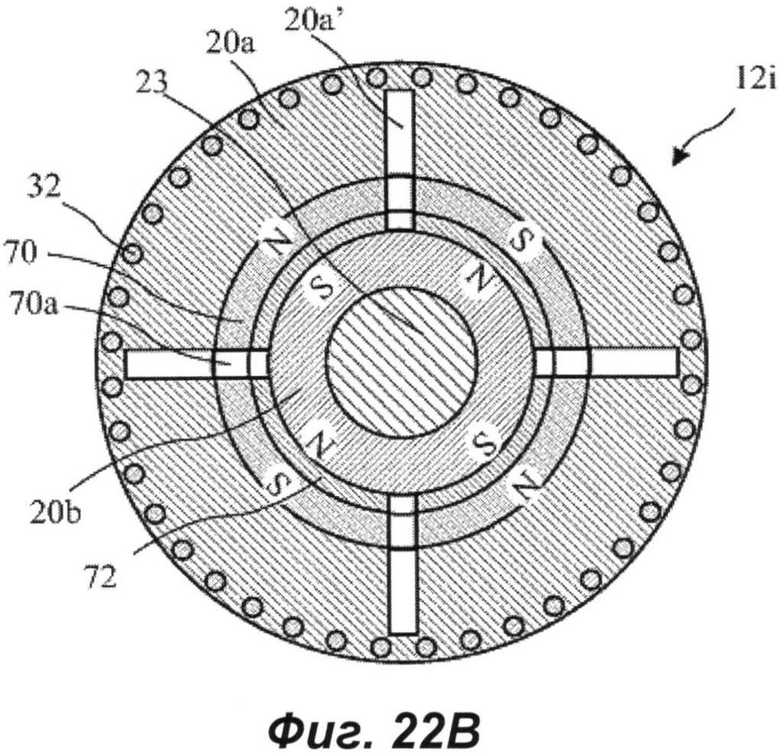
На фиг.22А согласно настоящему изобретению показан вид сбоку в разрезе магнитно шунтированного ротора, имеющего закрепленные магниты и магнитное шунтирование для его переконфигурации.
На фиг.22В показан разрез по линии 22В-22В (фиг.22А) магнитно шунтированного ротора.
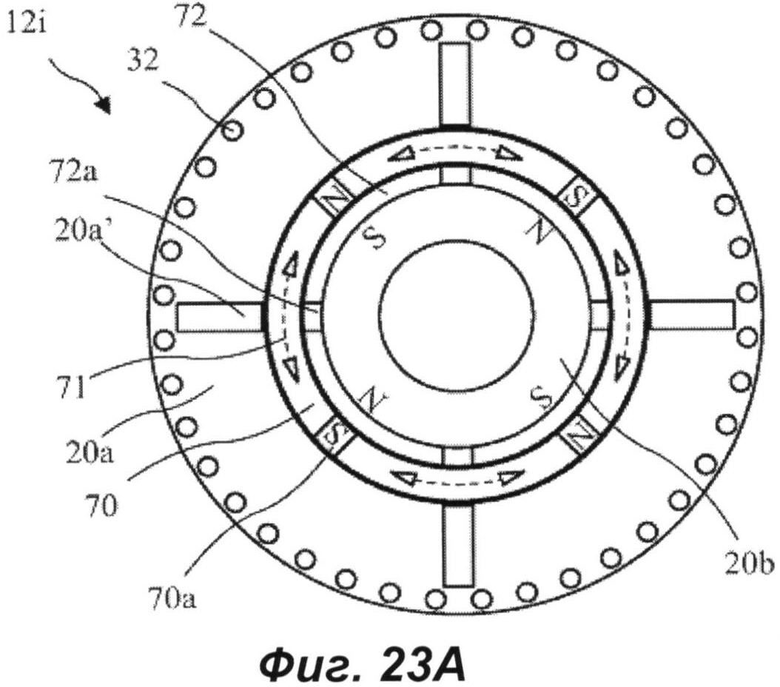
На фиг.23А показан магнитно шунтированный ротор с магнитными полями, созданными постоянными магнитами 72 в роторе, шунтированном для обеспечения минимальных эффективных магнитных полей.
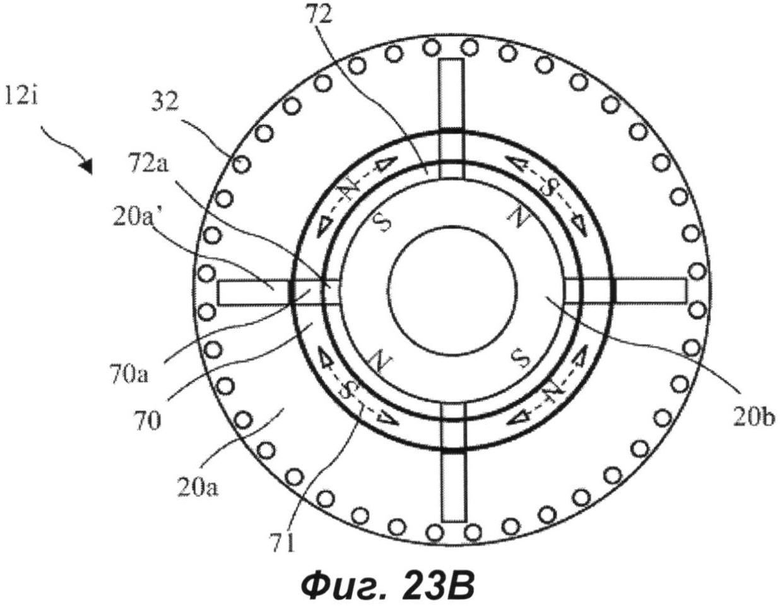
На фиг.23В показан магнитно шунтированный ротор с нешунтированными магнитными полями, созданными постоянными магнитами 72 в роторе для обеспечения максимальных эффективных магнитных полей.
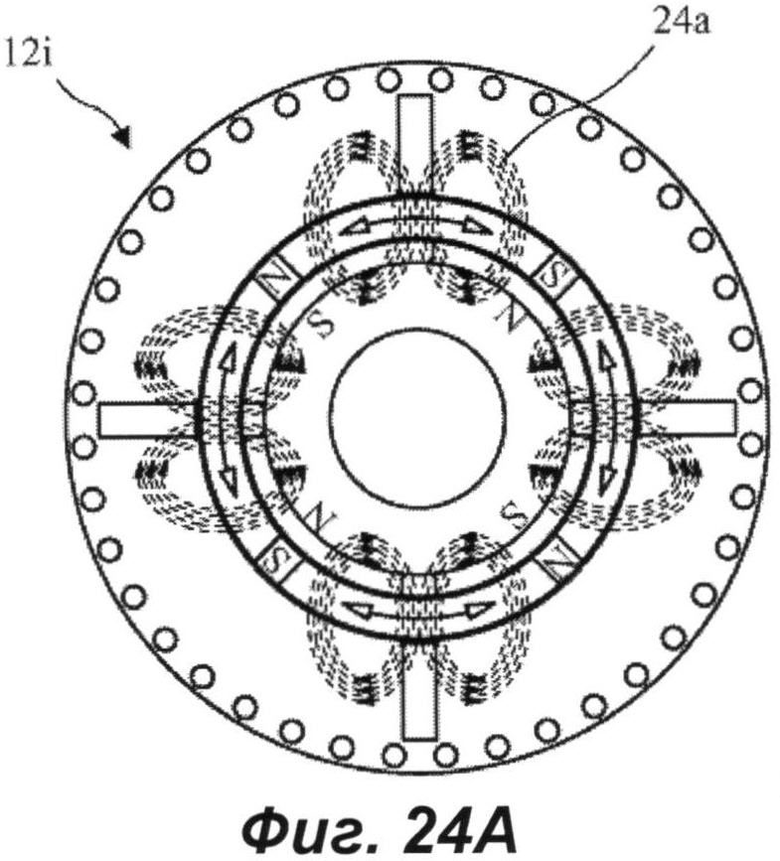
На фиг.24А показан магнитно шунтированный ротор с минимальными эффективными магнитными полями.
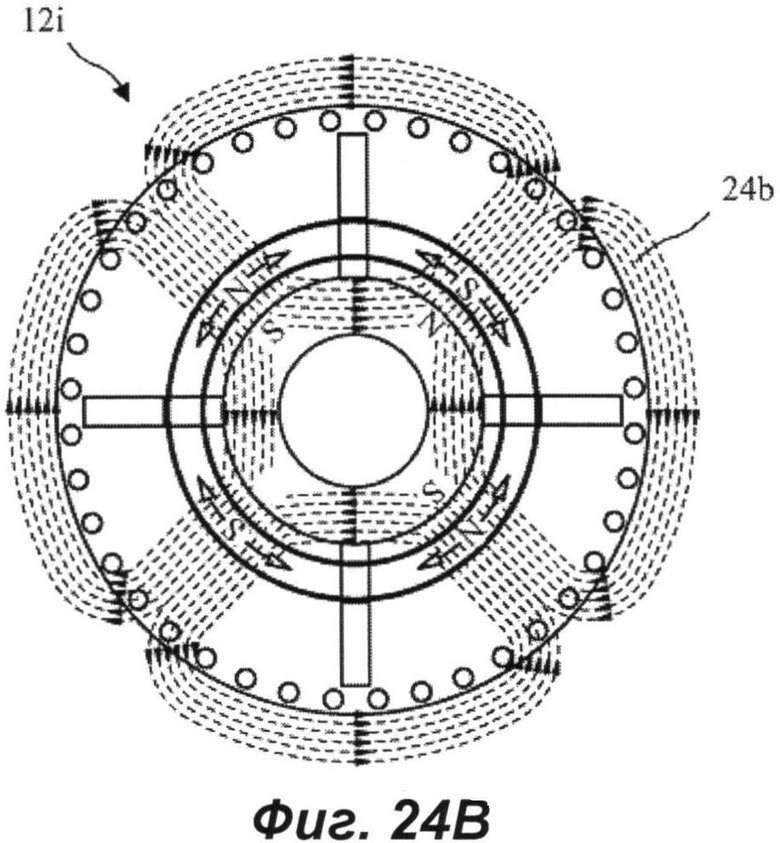
На фиг.24В показан магнитно шунтированный ротор с максимальными эффективными магнитными полями.
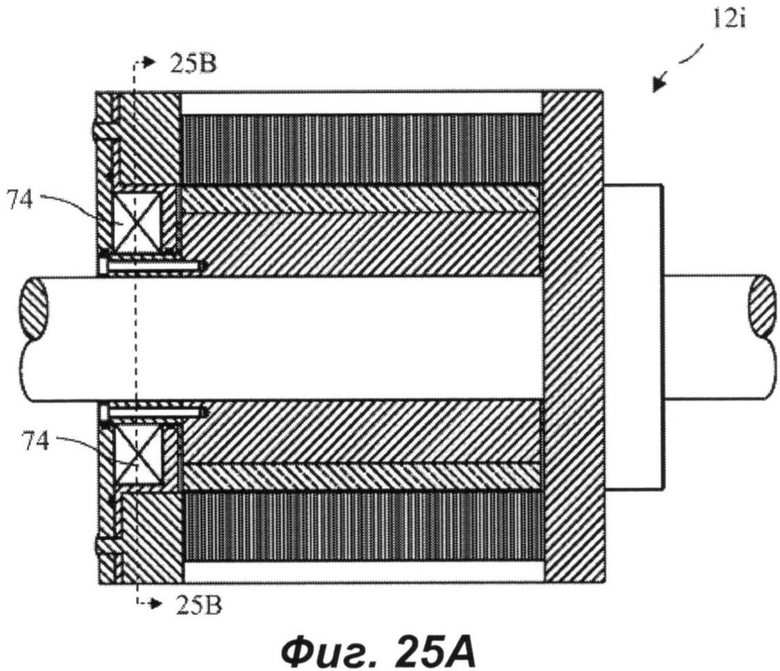
На фиг.25А показан вид сбоку в разрезе магнитно шунтированного ротора, отображающего демпфирующую конструкцию лопастного типа.
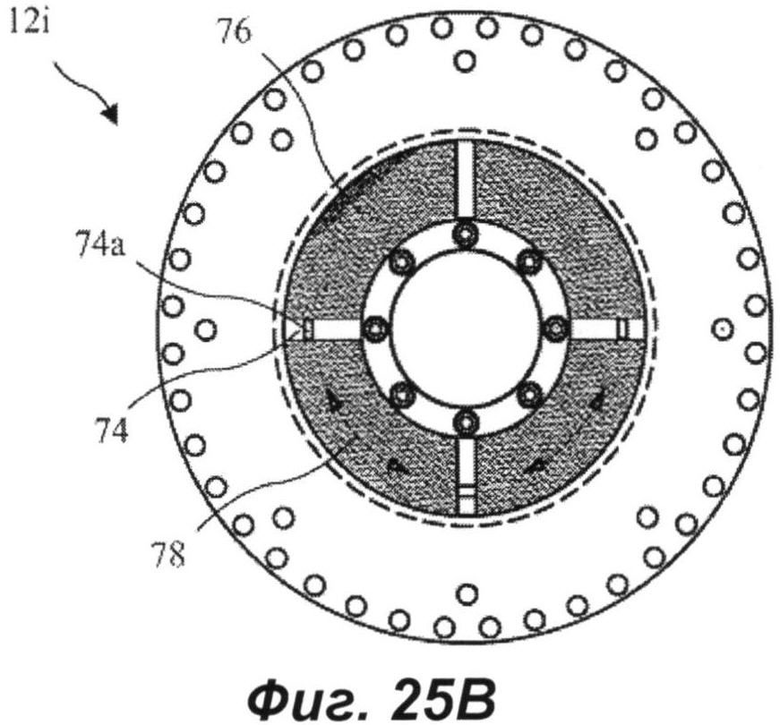
На фиг.25В показан разрез по линии 25В-25В (фиг.25А) магнитно шунтированного ротора, отображающего демпфирующую конструкцию лопастного типа.
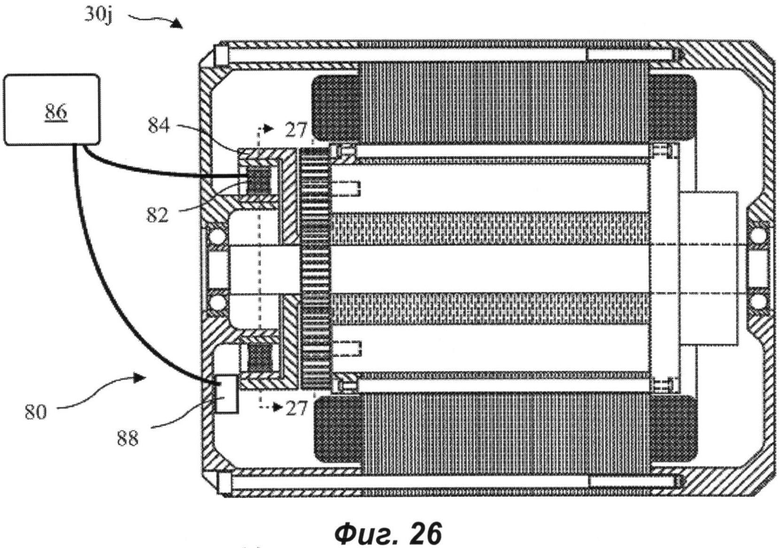
На фиг.26 согласно настоящему изобретению показан вид сбоку первого примера реализации привода, содержащего бесщеточный приводной двигатель, управляющий положением постоянного магнита в роторе большого двигателя.
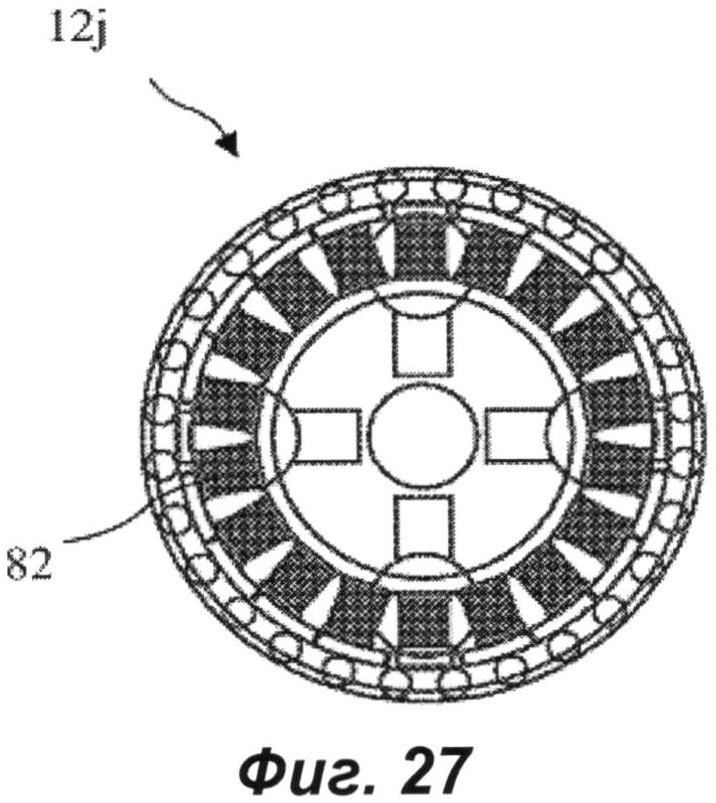
На фиг.27 показан разрез по линии 27-27 (фиг.26) первого примера реализации бесщеточного приводного двигателя.
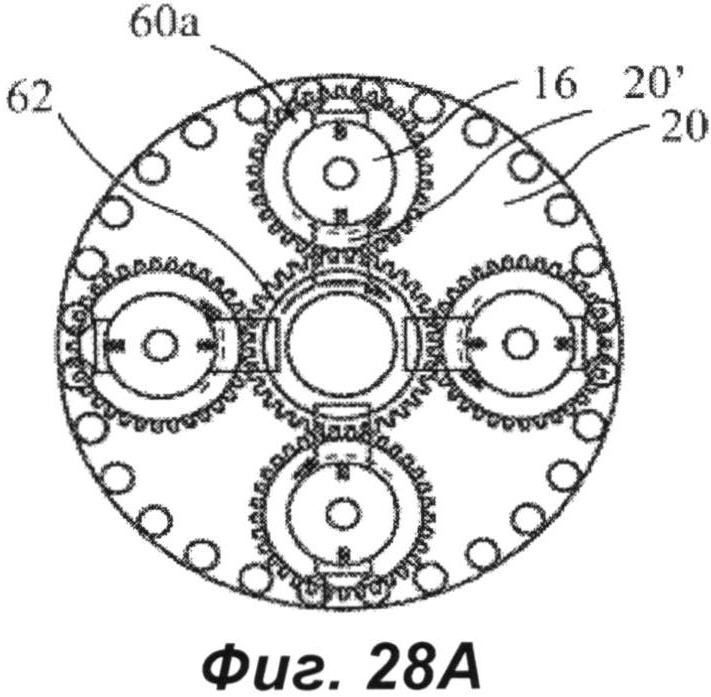
На фиг.28А показаны магниты двигателя, смещенные посредством первого примера реализации привода для создания слабого магнитного поля.
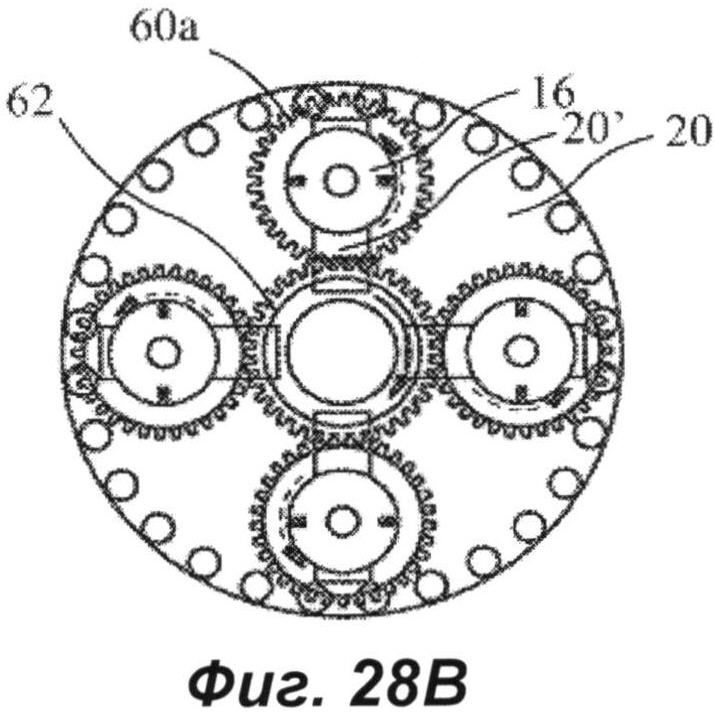
На фиг.28В показаны магниты двигателя, выравненные посредством первого примера реализации привода для создания сильного магнитного поля.
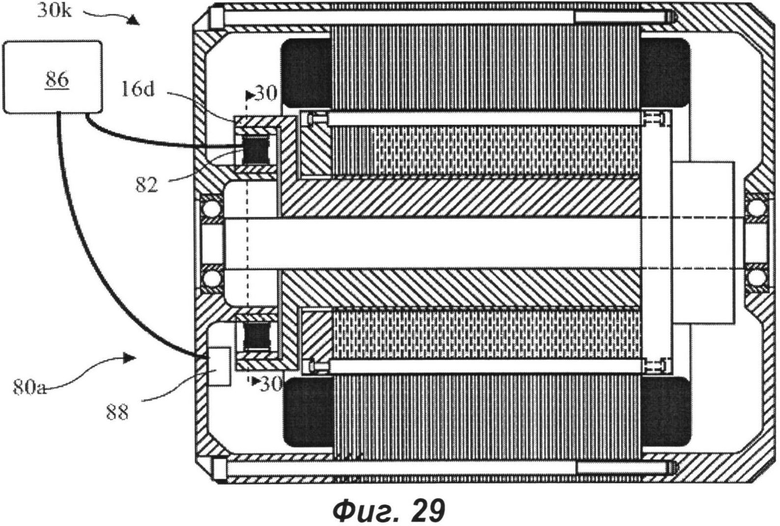
На фиг.29 согласно настоящему изобретению показан вид сбоку второго примера реализации привода, содержащего бесщеточный приводной двигатель, управляющий положением постоянного магнита в роторе большого двигателя.
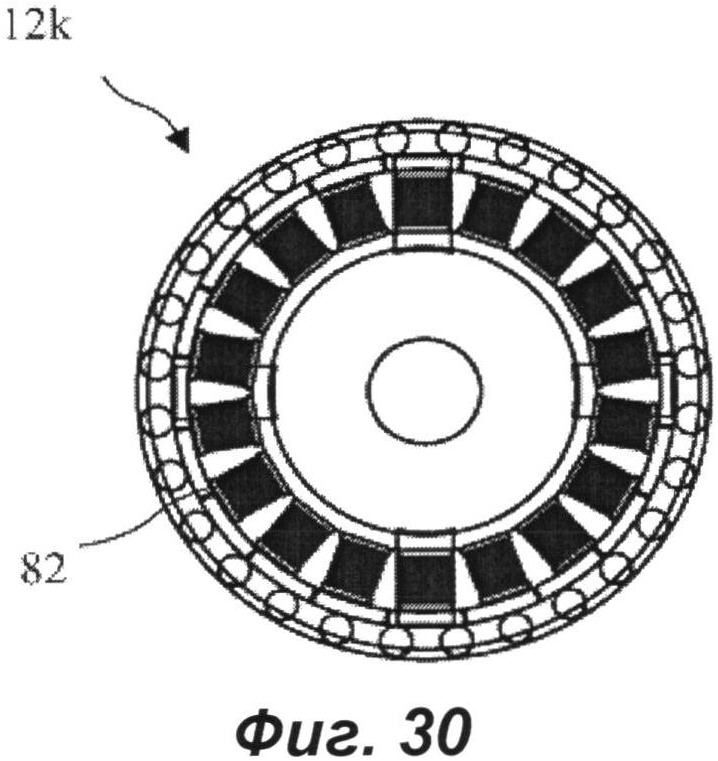
На фиг.30 показан разрез по линии 30-30 (фиг.29) второго примера реализации бесщеточного приводного электродвигателя.
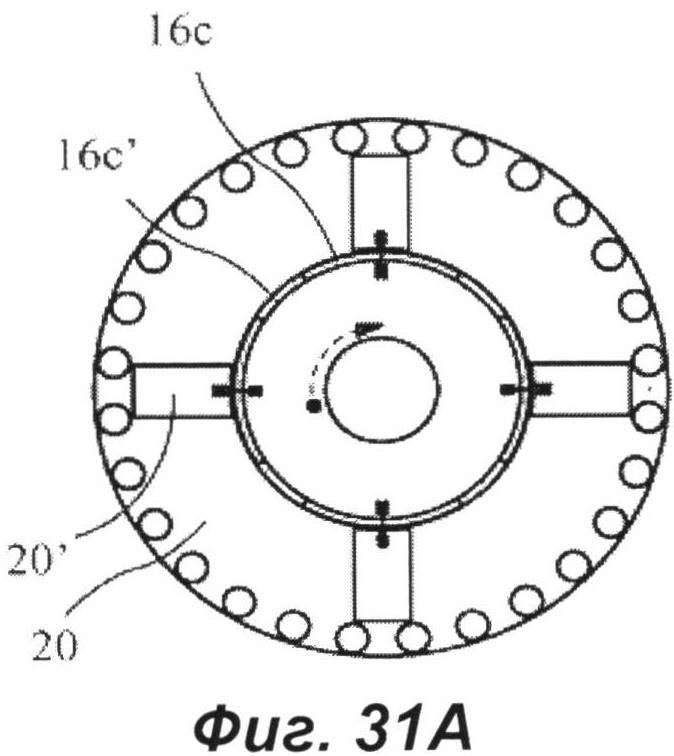
На фиг.31А показан магнит двигателя, смещенный посредством второго примера реализации привода для создания слабого магнитного поля.
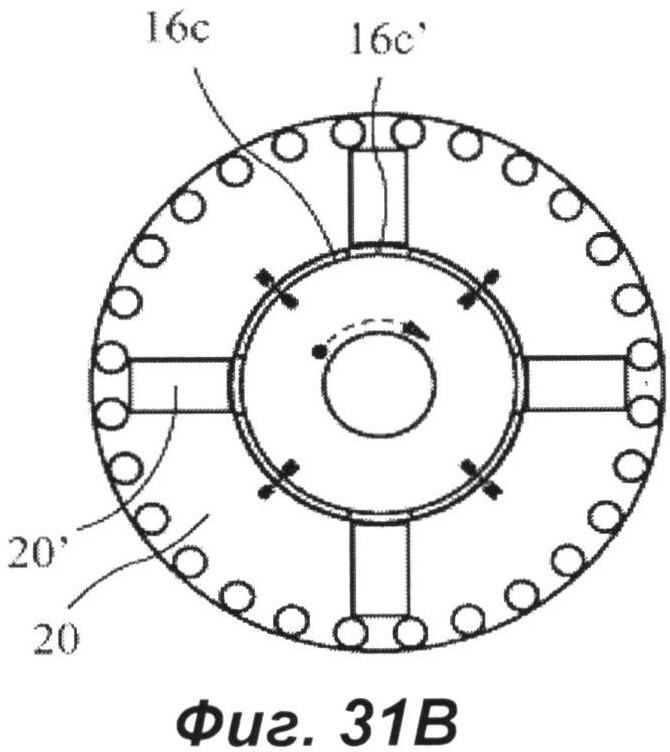
На фиг.31В показан магнит двигателя, смещенный посредством второго примера реализации привода для создания сильного магнитного поля.
На всех чертежах настоящей заявки аналогичные компоненты обозначены одинаковыми ссылочными номерами.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В приведенном далее описании рассмотрены наилучшие технические реализации настоящего изобретения. Настоящее описание не имеет ограничительного характера и составлено исключительно для описания одного или нескольких предпочтительных примеров реализации настоящего изобретения. Объем изобретения должен быть определен на основании формулы изобретения.
На фиг.1А показан вид сбоку реконфигурируемого электродвигателя 10 согласно настоящему изобретению, на фиг.1В показан вид с торца реконфигурируемого электродвигателя 10, а на фиг.2 показан вид реконфигурируемого электродвигателя 10 в разрезе по линии 2-2 (фиг.1А). Двигатель 10 содержит статорные обмотки 14 и ротор 12, расположенный на поворотном двигательном вале 11 и в статорных обмотках 14. Двигатель 10 представляет собой бесщеточный индукционный двигатель переменного тока, ротор 12 которого содержит по меньшей мере один постоянный магнит 16 (см. фиг.3-7), который может быть отрегулирован для обеспечения слабого магнитного поля при запуске в первоначальном асинхронном режиме и сильного магнитного поля после его запуска для обеспечения эффективной работы в синхронном режиме.
На фиг.3 показан разрез по линии 3-3 (фиг.2) первого примера реализации реконфигурируемого электродвигателя 10, содержащего двухполюсный двигатель 30а с одним двухполюсным поворотным внутренним постоянным магнитом 16 (IPM) в роторе 12а, расположенном коаксиально относительно двигательного вала 11 (фиг.3). На каждой из сторон магнита 16 образованы воздушные зазоры 21, разделяющие северный (N) и южный (S) полюса магнита 16 с радиально выровненной конструкцией. Стержни 32 короткозамкнутой обмотки для обеспечения возникновения индукции расположены с угловым интервалом по внешнему радиусу ротора 12 и проходят на длину ротора 12. Стержень может быть выполнен прямым или скрученным для уменьшения шума наряду с другими преимуществами. Магнит 16 и стержни 32 оперты на полюсные наконечники 20 ротора с разделением воздушными зазорами 21. Полюсные наконечники 20 предпочтительно выполнены из пластинчатых слоев из по отдельности изолированного магнитопроводящего материала, например железа или стали.
На фиг.4 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) второго примера реализации реконфигурируемого электродвигателя 10, содержащего четырехполюсный двигатель 30b с одним четырехполюсным поворотным постоянным магнитом 16а, расположенным коаксиально относительно двигательного вала 11 в роторе с радиально выравненной конструкцией. Полюсный наконечник 20 разделен на четыре четверные части воздушными зазорами 21 между соседними частями. Во всем остальном двигатель 30b аналогичен двигателю 30а.
На фиг.5 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) третьего примера реализации реконфигурируемого электродвигателя 10, содержащего четырехполюсный двигатель 30с с ротором, содержащим один полый четырехполюсный поворотный постоянный магнит 16b, расположенный коаксиально относительно двигательного вала 11 в роторе с радиально выравненной конструкцией. Стальной вал 23 проходит через центр полого магнита 16b. Во всем остальном двигатель 30с аналогичен двигателю 30b.
На фиг.2А показан перспективный вид двухполюсного постоянного цилиндрического магнита 16, используемого в настоящем изобретении. Магнит 16 имеет ось 11а. Несмотря на то что цилиндрический магнит согласно настоящему изобретению выполнен в форме, предпочтительной для поворотного магнита, могут быть использованы другие формы с обеспечением возможности перемещения для получения преимуществ настоящего изобретения, а электродвигатель с подвижными магнитами любой формы, обеспечивающей возможность регулирования магнитного поля от слабого в асинхронном режиме работы до сильного в синхронном режиме работы, не выходит за объем настоящего изобретения.
На фиг.6 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) четвертого примера реализации реконфигурируемого четырехполюсного электродвигателя 10, содержащего четырехполюсный двигатель 30d с четырьмя двухполюсными поворотными постоянными магнитами 16, которые расположены с угловыми интервалами и магнитные оси которых параллельны двигательному валу 11 в роторе с радиально выравненной конструкцией. Полюсный наконечник содержит четыре внешних полюсных наконечника 20а и один полый центральный полюсный наконечник 20b. Магниты 16 расположены радиально между центральным полюсным наконечником 20b и внешними полюсными наконечниками 20а, а воздушные зазоры 21 отделяют каждый из внешних полюсных наконечников 20а от смежного внешнего полюсного наконечника 20а и отделяют центральный полюсный наконечник 20b от внешних полюсных наконечников 20а. Стержни 32 короткозамкнутой обмотки расположены с угловыми интервалами вокруг внешнего радиуса ротора 12, достигающего длины ротора 12. Стержень может быть выполнен прямым или скрученным для уменьшения шума наряду с другими преимуществами. Полюсные наконечники 20а и 20b предпочтительно выполнены из пластинчатых слоев из изолированного магнитопроводящего материала, например железа или стали.
На фиг.7 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) пятого примера реализации реконфигурируемого четырехполюсного электродвигателя 10, содержащего четырехполюсный двигатель 30е с ротором 12е, содержащим четыре пары двухполюсных поворотных постоянных магнита 16, которые расположены с угловыми интервалами и магнитные оси которых параллельны двигательному валу 11 в роторе с радиально выравненной конструкцией. Другие аналогичные примеры реализации могут содержать четыре группы по меньшей мере из трех магнитов. Во всем остальном двигатель 30е аналогичен двигателю 30d.
На фиг.8 согласно настоящему изобретению показан разрез по линии 3-3 (фиг.2) шестого примера реализации реконфигурируемого четырехполюсного электродвигателя 10, содержащего четырехполюсный двигатель 30f c ротором 12f, содержащим четыре двухполюсных поворотных постоянных магнита 16, которые расположены с угловыми интервалами и магнитные оси которых параллельны двигательному валу 11 в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока. Четыре магнита 16 расположены под углом между четырьмя полюсными наконечниками 20с, расположенными с угловыми интервалами. Во всем остальном двигатель 30f аналогичен двигателю 30d.
На фиг.9А показан разрез по линии 3-3 (фиг.2) двигателя 30а (см. фиг.3) с одним двухполюсным постоянным магнитом 16, повернутым с обеспечением минимального (или слабого) магнитного поля 24а. Слабое магнитное поле 24а не препятствует запуску двигателя 30а в индукционном режиме при первоначальной работе в асинхронном режиме.
На фиг.9В показан разрез по линии 3-3 (фиг.2) двигателя 30а с одним двухполюсным постоянным магнитом 16, повернутым с обеспечением максимального (или сильного) магнитного поля 24b. Сильное магнитное поле 24b препятствует запуску двигателя 30а, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30а.
На фиг.10А показан разрез по линии 3-3 (фиг.2) двигателя 30b (см. фиг.4) с одним четырехполюсным постоянным магнитом 16а, повернутым с обеспечением минимального (или слабого) магнитного поля 24а. Слабое магнитное поле 24а не препятствует запуску двигателя 30а в индукционном режиме при первоначальной работе в асинхронном режиме.
На фиг.10В показан разрез по линии 3-3 (фиг.2) двигателя 30b с одним четырехполюсным постоянным магнитом 16а, повернутым с обеспечением максимального (или сильного) магнитного поля. Сильное магнитное поле 24b будет препятствовать запуску двигателя 30b, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30b.
На фиг.11А показан разрез по линии 3-3 (фиг.2) двигателя 30с (см. фиг.5) с одним полым четырехполюсным постоянным магнитом 16b, повернутым с обеспечением минимального (или слабого) магнитного поля 24а. Слабое магнитное поле 24а не препятствует запуску двигателя 30а в индукционном режиме при первоначальной работе в асинхронном режиме.
На фиг.11В показан разрез по линии 3-3 (фиг.2) двигателя 30с с одним полым четырехполюсным постоянным магнитом 16b, повернутым с обеспечением максимального (или сильного) магнитного поля. Сильное магнитное поле 24b будет препятствовать запуску двигателя 30с, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30с.
На фиг.12А показан разрез по линии 3-3 (фиг.2) двигателя 30d (см. фиг.6) с четырьмя двухполюсными постоянными магнитами 16, повернутыми с обеспечением минимального (или слабого) магнитного поля 24а. Слабое магнитное поле 24а не препятствует запуску двигателя 30d в индукционном режиме при первоначальной работе в асинхронном режиме.
На фиг.12В показан разрез по линии 3-3 (фиг.2) двигателя 30d с четырьмя двухполюсными постоянными магнитами 16, повернутыми с обеспечением максимального (или сильного) магнитного поля. Сильное магнитное поле 24b будет препятствовать запуску двигателя 30d, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30d.
На фиг.13А показан разрез по линии 3-3 (фиг.2) двигателя 30е (см. фиг.7) с четырьмя парами двухполюсных постоянных магнитов 16, повернутыми с обеспечением минимального (или слабого) магнитного поля 24а. Слабое магнитное поле 24а не препятствует запуску двигателя 30е в индукционном режиме при первоначальной работе в асинхронном режиме.
На фиг.13В показан разрез по линии 3-3 (фиг.2) двигателя 30е с четырьмя парами двухполюсных постоянных магнитов 16, повернутыми с обеспечением максимального (или сильного) магнитного поля. Сильное магнитное поле 24b может препятствовать запуску двигателя 30е, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30е.
На фиг.14А показан разрез по линии 3-3 (фиг.2) двигателя 30f (см. фиг.8) с четырьмя двухполюсными постоянными магнитами 16, повернутыми с обеспечением минимального (или слабого) магнитного поля 24а в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока. Слабое магнитное поле 24а не препятствует запуску двигателя 30f в индукционном режиме при первоначальной работе в асинхронном режиме. На фиг.14В показан разрез по линии 3-3 (фиг.2) двигателя 30f с четырьмя двухполюсными постоянными магнитами 16, повернутыми с обеспечением максимального (или сильного) магнитного поля 24а в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока. Сильное магнитное поле 24b будет препятствовать запуску двигателя 30f, однако обеспечивает более эффективную работу в синхронном режиме после запуска двигателя 30f.
На фиг.15А показан вид сбоку в разрезе двигателя 30а (см. фиг.3) с центробежным зажимным приспособлением 40, удерживающим один постоянный магнит 16 в положении, соответствующем минимальному магнитному полю (см. фиг.9А), а на фиг.15В показан вид с торца этого двигателя 30а. На фиг.16А показан второй вид сбоку в разрезе двигателя 30а, содержащего центробежное зажимное приспособление 40 с одним освобожденным постоянным магнитом 16 в положении, соответствующем максимальному магнитному полю, а на фиг.16В показан вид с торца этого двигателя 30а. Центробежное зажимное приспособление 40 содержит грузы 44, поворотную пластину 50, тарельчатую пружину 48, подвижную пластину 46, штыри 42 и штыревые гнезда 52. Грузы 44 и тарельчатая пружина 48 выбраны таким образом, что при соответствующей частоте вращения грузы совершают перемещение по направлению наружу с обеспечением перехода тарельчатой пружины 48 из первого выдвинутого положения (фиг.15А) в задвинутое положение по фиг.16А для обеспечения, таким образом, выхода штифтов 42 из гнезд 52 с освобождением магнита 16.
При остановке двигателя 30а магнит 16 магнитно поджат до положения слабого магнитного поля, а центробежное зажимное приспособление 40 также поджимает штыри 42 в гнезда 52. В итоге, двигатель 30а совершает возврат в режим слабого магнитного поля при каждой его остановке с обеспечением возможности его запуска в качестве асинхронного индукционного двигателя. При достижении двигателем 30а надлежащей частоты вращения центробежное зажимное приспособление 40 вытягивает штыри 42 из штыревых гнезд 52 с обеспечением освобождения магнита 16. При надлежащей частоте вращения магнитные поля в двигателе 30а поджимают постоянный магнит 16 для поворота на 90 градусов в положение сильного магнитного поля для обеспечения, таким образом, эффективной работы в синхронном режиме.
Центробежное зажимное приспособление Synchrosnap®, выполненное компанией «TORQ Corp.» из г.Бредфорд в штате Огайо, представляет собой пример надлежащего центробежного зажимного приспособления. Для использования в настоящем изобретении центробежное зажимное приспособление Synchrosnap® только немного модифицировано для приведения в действие штырей 42, а не для выполнения функции электрического переключателя.
На фиг.17А (вид сбоку, слабое поле), фиг.17В (вид с торца, слабое поле), фиг.18А (вид сбоку, сильное поле) и фиг.18В (вид с торца, сильное поле) показан второй пример устройства для обеспечения перехода от слабого магнитного поля к сильному магнитному полю 24b, используемому в двигателе 30f (см. фиг.8). Каждый из четырех магнитов 16 двигателя 30f прикреплен к небольшой шестерне 60, взаимодействующей с большой шестерней 62, вследствие чего все магниты 16 сохраняют выравнивание по оси. Штыри 42 взаимодействуют со штыревыми гнездами 52 в большой шестерне 62 при неподвижном положении двигателя 30f, а при достижении двигателем 30f надлежащей частоты вращения центробежное зажимное приспособление 40 вытягивает штыри 42 из штыревых гнезд 42 с обеспечением освобождения магнита 16. Аналогично двигателю 30а при остановке двигателя 30f его постоянные магниты 16 магнитно поджаты до положения слабого магнитного поля (см. фиг.14А) и поджаты до положения сильного магнитного поля (см. фиг.14 В) при частоте вращения, достаточной для работы в синхронном режиме.
На фиг.19А согласно настоящему изобретению показан вид с торца ротора 12g реконфигурируемого электродвигателя с центробежным приспособлением, удерживающим полый цилиндрический сегментированный четырехполюсный постоянный магнит 16с (аналогично полому четырехполюсному постоянному магниту 16b на фиг.5) в положении минимального магнитного поля, а на фиг.19В показан вид с торца ротора 12g с центробежным приспособлением, поворачивающим четырехполюсный постоянный магнит в положение максимального магнитного поля. Четыре нагруженных малых шестерни 60а имеют массовый дисбаланс, создающий вращающий момент при повороте ротора с обеспечением поворота каждой шестерни 60а. Шестерни 60а взаимодействуют с центральной большой шестерней 62 для ее поворота, а магнит 16с совершает поворот вместе с шестерней 62. При останове ротора 12g происходит смещение магнита 16с с обеспечением размещения магнитных зазоров 16с' между зазорами 20' полюсных наконечников с образованием минимального магнитного поля. При раскручивании ротора 12g массовые дисбалансы в шестернях 60а приводят к повороту шестерен 60а с обеспечением также поворота шестерни 62 и магнита 16с. К моменту достижения ротором 12g скорости работы в синхронном режиме магнитные зазоры 16с' оказываются выравнены с зазорами 20' полюсных наконечников с обеспечением максимального магнитного поля и эффективной работы в синхронном режиме.
На фиг.20А согласно настоящему изобретению показан вид сбоку в разрезе ротора реконфигурируемого электродвигателя с полыми цилиндрическими сегментированными четырехполюсными постоянными магнитами 16с, соединенными встык на половину длины и имеющими полюсы, смещенные относительно друг друга для обеспечения слабого магнитного поля, а на фиг.20В согласно настоящему изобретению показан разрез по линии 20В-20В (фиг.20А) реконфигурируемого ротора с магнитами 16с, соединенными встык на половину длины и смещенными относительно друг друга для обеспечения слабого магнитного поля. В этом примере реализации подвижный первый магнит 16а (то есть магнит, расположенный наиболее близко к центробежному зажимному приспособлению 40) выполнен с возможностью поворота для смещения полюсов N-S первого магнита 16с относительно полюсов N-S закрепленного второго магнита 16с для создания слабого магнитного поля. Создание такого слабого поля обеспечивает возможность запуска двигателя с ротором 12h в асинхронном режиме.
На фиг.21А согласно настоящему изобретению показан вид сбоку ротора 12h с полыми цилиндрическими сегментированными четырехполюсными постоянными магнитами 16с, соединенными встык на половину длины и имеющими полюсы, выравненные для обеспечения сильного магнитного поля, а на фиг.21В согласно настоящему изобретению показан разрез по линии 21В-21В (фиг.21А) ротора 12h с соединенными встык на половину длины укороченными магнитами 16с, выравненными для обеспечения сильного магнитного поля. Центробежное зажимное приспособление 40 удерживает первый магнит в смещенном положении до достижения частоты вращения, достаточной для обеспечения возможности грузам 44 преодолеть воздействия пружин 48 для освобождения первого магнита 16с, проявляющего тенденцию к выравниванию со вторым магнитом 16с.
В еще одних примерах реализации управление перемещением первого магнита 16с может быть выполнено посредством другого электромеханического устройства или путем вязкого демпфирования. Окружение силиконом подвижного магнита 16с представляет собой пример вязкого демпфирования.
На фиг.22А согласно настоящему изобретению показан вид сбоку в разрезе магнитно шунтированного ротора, содержащего закрепленные постоянные магниты 72 и поворотное немагнитное проводящее шунтирующее кольцо 70 для переконфигурации ротора, а на фиг.22В показан разрез по линии 22В-22В (фиг.22А) магнитно шунтированного ротора 12i. Поворотное шунтирующее кольцо 70 расположено с внешней стороны закрепленных постоянных магнитов 72 с обеспечением их отделения от внешних полюсных наконечников 20а, расположенных с внешней стороны поворотного шунтирующего кольца 70 и содержащих отдельно изолированные пластинчатые слои для минимизации вихревых токов.
Внутренний полюсный наконечник 20b (ярмо или магнитный якорь) расположен в закрепленных постоянных магнитах 72 и обеспечивает обратный путь для магнитного потока. Ярмо 20b расположено над двигательным валом 23, предпочтительно взаимодействующим для обеспечения толщины, достаточной для замыкания магнитного контура с закрепленными постоянными магнитами 72 и поворотным шунтирующим кольцом 70. Аналогично полюсным наконечникам 20 и 20а, ярмо 20b предпочтительно содержит отдельные изолированные пластинчатые слои для минимизации вихревых токов, однако оно может быть выполнено цельным. В одном из примеров реализации статор, внешние полюсные наконечники 20а и ярмо 20b могут быть выполнены из аналогичной части пластины путем высекания каждой необходимой формы с обеспечением, таким образом, использования практически всего материала и уменьшения отходов, а, следовательно, и уменьшения расходов. Использование такой технологии предпочтительно в крупномасштабных производствах, например при изготовлении кондиционеров или двигателей холодильных камер. Закрепленные постоянные магниты 72 и ярмо 20b могут представлять собой полюсный наконечник, например при наличии у двигателя четырехполюсного якоря вследствие наличия четырех магнитов.
На фиг.23А показан магнитно шунтированный ротор 12i с магнитными полями, созданными постоянными магнитами 72 в роторе 12i, шунтированном для обеспечения минимальных эффективных магнитных полей, а на фиг.23В показан магнитно шунтированный ротор 12i с магнитными полями, созданными постоянными магнитами 72 в роторе, не шунтированном для обеспечения максимальных эффективных магнитных полей. Переключение между шунтированным и нешунтированным положениями выполнено путем поворота шунтирующего кольца 70 вдоль дуг 71. В шунтированном положении кольцевые зазоры 70а в поворотном шунтирующем кольце 70 не выровнены с магнитными зазорами 72а в постоянных магнитах 72 и зазорами 20а' в полюсных наконечниках 20а. В нешунтированном положении кольцевые зазоры 70а в поворотном шунтирующем кольце 70 выровнены с магнитными зазорами 72а в постоянных магнитах 72 и зазорами 20а' в полюсных наконечниках 20а.
На фиг.24А показан магнитно шунтированный ротор 121 с минимальными эффективными магнитными полями 24, а на фиг.24В показан магнитно шунтированный ротор 121 с максимальными эффективными магнитными полями 24b. Минимальные магнитные поля обеспечивают возможность запуска магнитно шунтированного двигателя в качестве асинхронного индукционного двигателя, а максимальные магнитные поля обеспечивают возможность эффективной работы магнитно шунтированного двигателя в качестве синхронного двигателя.
На фиг.25А показан разрез магнитно шунтированного ротора 121 и конструкции вязкого демпфирования для предотвращения быстрого изменения между шунтирующим и нешунтирующим действиями, а на фиг.25В разрез по линии 25В-25В (фиг.25А) магнитно шунтированного ротора 12i, отображающего лопастную демпфирующую конструкцию. Конструкция вязкого демпфирования соединена с поворотным шунтирующим кольцом 70 для предотвращения поворота шунтирующего кольца 70. Магнитные поля в роторе 121 предпочтительно обеспечивают естественное смещение поворотного шунтирующего кольца 70 в шунтированное положение при расположении ротора 121 в неподвижном положении и естественное смещение в нешунтированное положение при работе двигателя.
Пример конструкции вязкого демпфирования содержит лопасти 74 в камере, заполненной вязкой текучей средой 76. Лопасти 74 могут содержать несколько лопастей, например четыре лопасти. Вязкая текучая среда 76 может представлять собой силиконовую жидкость, коэффициент вязкости которой может быть выбран для обеспечения необходимого вязкого демпфирования поворотного шунтирующего кольца 70. Лопасти 74 могут иметь отверстия 74а, обеспечивающие возможность протекания вязкой жидкости мимо лопастей 74, поскольку лопасти совершают перемещение вдоль дуг. Количество лопастей 74, количество и размер отверстий 74а могут быть отрегулированы по коэффициенту вязкости вязкой жидкости для демпфирования поворотного шунтирующего кольца 70. Поворотное шунтирующее кольцо 70 будет предпочтительно демпфировано для предотвращения его вибрации при переходах двигателя из асинхронного режима в синхронный режим.
В еще одном примере реализации изобретения конструкция вязкого демпфирования использована путем выполнения просвета вокруг поворотного шунтирующего кольца 70. Просвет заполнен вязкой текучей средой, а управление степенью демпфирования может происходить путем посредством выбора коэффициента вязкости вязкой жидкости. Силиконовая жидкость представляет собой пример подходящей вязкой жидкости. Несмотря на то, что в настоящем описании описано вязкое демпфирование для магнитно шунтированного ротора, такое вязкое демпфирование также может быть использовано в любом примере реализации реконфигурируемого электродвигателя, описанном в настоящей заявке (см., например, фиг.3-8, 19А, 19В и 20А-21В), и использующем шунтирующее кольцо или подвижный постоянный магнит. В каждом случае подвижный элемент магнитного контура может контактировать с вязким материалом, например силиконом, или может быть соединен с конструкцией вязкого демпфирования, описанной и показанной на фиг.25А и 25В. Область контакта может представлять собой всю внешнюю поверхность подвижного элемента или ее часть. Кроме того, коэффициент вязкости вязкого материала может быть выбран для отдельных случаев с обеспечением надлежащей задержки перехода от слабого магнитного поля к сильному магнитному полю.
Обычно вязкое демпфирование задерживает переход от слабого магнитного поля при запуске к сильному магнитному полю для обеспечения эффективной работы в синхронном режиме. Такая задержка предпочтительно составляет от одной до пяти секунд, однако может быть и дольше в зависимости от нагрузки при запуске, и обеспечивает задержку при переходе к сильному магнитному полю при частоте вращения, близкой к синхронной. При переходе к сильному магнитному полю (например, при 20-30 процентном выравнивании), незадолго до достижения двигателем синхронной частоты вращения возникает небольшой пусковой вращающий момент, а задержка при переходе приводит к небольшому кратковременному уменьшению эффективности. Кроме того, вязкое демпфирование уменьшает или ограничивает вибрации при переходе ротора к сильному магнитному полю.
Вышеописанное вязкое демпфирование предпочтительно для небольших недорогих двигателей, таких как двигатели общего назначения, влекущих небольшие затраты. В более крупных дорогих двигателях для точного управления магнитным полем ротора для оптимизации эффективности может быть использован электромеханический привод, включая, например, шестерни и/или гидравлический привод, пневматический привод или электропривод, для точного управления роторным магнитным полем для оптимизации эффективности, некоторые примеры реализации таких двигателей раскрыты в патентной заявке США №12/610,271, включенной в настоящее описание посредством ссылки.
Вследствие высокой стоимости больших двигателей приводная система с обратной связью представляет собой целесообразное и экономичное дополнение к переконфигурируемому асинхронно-синхронному двигателю, поскольку стоимость такой приводной системы с обратной связью составляет небольшой процент от затрат, связанных с модификацией роторов больших двигателей или приобретением нового большого двигателя. В больших двигателях роторная инерция и/или нагрузка на двигатель может значительно увеличить время запуска. В таких случаях привод с электронным управлением может быть использован для управления магнитным полем ротора. Например, при превышении нагрузкой на двигатель вращающего момента стопорного ротора, происходит уменьшение скорости до примерно ниже 50 процентов от синхронной частоты вращения, а привод может сместить элементы магнитного контура в роторе для уменьшения роторного магнитного поля с обеспечением возврата двигателя в исходное состояние под действием индукционного момента до уменьшения двигательной нагрузки или достижения асинхронной частоты вращения, при которой привод может повторно выравнять элементы магнитного контура.
На фиг.26 показан вид сбоку первого примера реализации приводного механизма, содержащего бесщеточный приводной двигатель 80, прикрепленный к ротору с постоянными магнитами, и статор большого двигателя 30j, а на фиг.27 показан разрез по линии 27-27 (фиг.26) бесщеточного приводного двигателя 80. Приводной двигатель 80 соединен с управляющим устройством (или процессором) 86, на который поступает энергия от двигателя или отдельного источника низкого напряжения. Датчик и/или датчик положения 88, используемый для определения поворотного положения, соединен с управляющим устройством 86 для обеспечения обратной связи и управления. Приводной двигатель 80 содержит закрепленные катушки (статоры) 82 и ротор 84 с прикрепленными к нему магнитами. Приводной ротор 84 (ротор привода) соединен с поворотным постоянным магнитом(ами) ротора 12j или поворотными шунтирующими частями ротора 12 для регулирования ротора 12j от слабого магнитного поля для обеспечения запуска к сильному магнитному полю для обеспечения эффективной работы в синхронном режиме.
На фиг.28А показаны магниты 16 двигателя 30j, регулируемого посредством первого примера реализации привода для создания слабого магнитного поля, а на фиг.28В показаны магниты двигателя, регулируемого посредством первого примера реализации привода для создания сильного магнитного поля. Приводной ротор 84 соединен непосредственно с шестерней 62, поворачивающей шестерни 60а (см. фиг.28А и 28В), присоединенные к каждому цилиндрическому магниту 16.
При запуске приводной двигатель 80 совершает поворот со скоростью, аналогичной ротору 12j, с использованием данных датчика и/или датчика положения для установки роторных магнитов (или шунтирующих частей) в положение слабого магнитного поля, а при достижении двигателем 20j максимальной асинхронной скорости может происходить увеличение скорости приводного двигателя или ее уменьшение для обеспечения поворота роторных магнитов (или шунтирующих частей) ротора 12j в положение сильного магнитного поля, в котором нормальный магнитный поток будет поддерживать выравнивание, а приводной двигатель может свободно совершать поворот с ротором 12j без каких-либо потерь.
На фиг.29 согласно настоящему изобретению показан второй пример реализации привода, бесщеточный приводной двигатель 80 которого соединен с большим двигателем 30k, а на фиг.30 показан разрез по линии 30-30 (фиг.29) бесщеточного приводного двигателя 80. Цилиндрический постоянный магнит 16d имеет изломы, проходящие через катушки 82 с образованием ротора приводного двигателя 80а. Таким образом, приводной двигатель 80 выполнен с возможностью управления положением магнитов 16d.
На фиг.31А показаны магниты 16d двигателя 30к, управляемого приводным двигателем 80 с использованием позиционирующего датчика и/или датчика 88 положения и управляющего устройства 86 для создания слабого магнитного поля, а на фиг.31В показаны магниты 16d, управляемые приводным двигателем 80 для создания сильного магнитного поля.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Настоящее изобретение находит промышленное применение в области электродвигателей.
ОБЪЕМ ИЗОБРЕТЕНИЯ
Несмотря на то что настоящее изобретение раскрыто на примере конкретных примеров реализации изобретения, специалистами в данной области могут быть внесены многочисленные модификации и изменения без выхода за пределы объема настоящего изобретения, определенного прилагаемой формулой изобретения.
Изобретение относится к электродвигателям, в частности к подвижным постоянным магнитам и/или немагнитным проводящим шунтирующим частям в роторе для преобразования двигателя из асинхронного индукционного двигателя при запуске в синхронный двигатель. Технический результат заключается в повышении эффективности работы. Реконфигурируемый электродвигатель содержит ротор с поворотными постоянными магнитами или немагнитными проводящими шунтирующими частями. Магниты и/или шунтирующие части имеют первое положение, создающее слабое магнитное поле для обеспечения работы двигателя в асинхронном режиме при его запуске, и второе положение, создающее сильное магнитное поле для обеспечения эффективной работы в синхронном режиме. Двигатель содержит также короткозамкнутую обмотку ротора. При приближении или достижении двигателем синхронной частоты вращения постоянные магниты и/или шунтирующие части совершают поворот для создания сильного магнитного поля с обеспечением высокой эффективности работы в синхронном режиме. 3 н. и 17 з.п. ф-лы, 52 ил.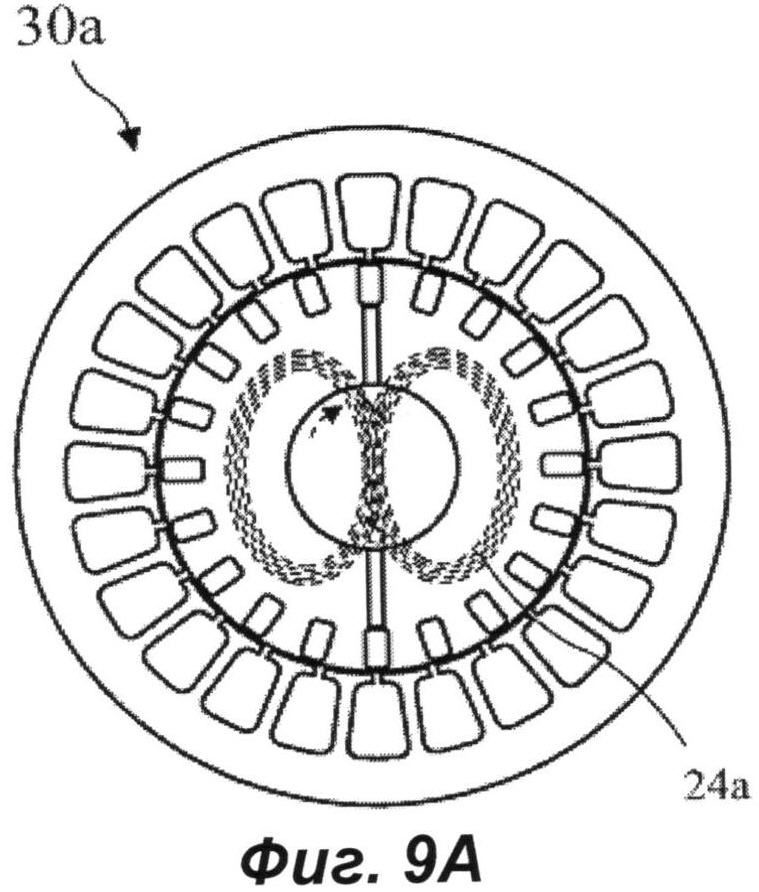
1. Реконфигурируемый бесщеточный электродвигатель переменного тока, работающий в асинхронном и синхронном режимах и содержащий:
статор, принимающий электрический сигнал переменного тока и создающий вращающееся статорное магнитное поле,
поворотный двигательный вал;
ротор, совершающий поворот с двигательным валом и содержащий:
индуктивные элементы для взаимодействия с вращающимся статорным магнитным полем с обеспечением асинхронного режима работы для запуска двигателя;
полюсные наконечники, прикрепленные к ротору, и
по меньшей мере один подвижный элемент магнитного контура, расположенный в роторе во взаимодействии с полюсными наконечниками и имеющий первое положение с созданием слабого магнитного поля для обеспечения возможности запуска индукционного двигателя и выполненный с возможностью перемещения относительно ротора во второе положение с созданием сильного магнитного поля для взаимодействия с вращающимся статорным магнитным полем с обеспечением эффективной работы в синхронном режиме.
2. Электродвигатель по п.1, в котором подвижный элемент магнитного контура содержит по меньшей мере один подвижный постоянный магнит.
3. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит один постоянный магнит, магнитная ось которого расположена параллельно двигательному валу.
4. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит один поворотный полый постоянный магнит, расположенный соосно с двигательным валом.
5. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит четыре поворотных постоянных магнита, имеющих параллельные оси и расположенных с угловым интервалом друг от друга, в роторе с радиально выровненной конструкцией.
6. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит четыре параллельные группы по меньшей мере из двух магнитов, расположенные на расстоянии друг от друга, в роторе с радиально выровненной конструкцией.
7. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит четыре параллельные пары поворотных постоянных магнитов, расположенные на расстоянии друг от друга, в роторе с радиально выровненной конструкцией.
8. Электродвигатель по п.2, в котором указанный по меньшей мере один подвижный постоянный магнит содержит четыре параллельных поворотных постоянных магнита, расположенных на расстоянии друг от друга в роторе, имеющем конструкцию с обеспечением сжатия магнитного потока.
9. Электродвигатель по п.2, дополнительно содержащий центробежный зажим для удержания по меньшей мере одного магнита в положении минимального магнитного поля до достижения частоты вращения, достаточной для перехода в синхронный режим.
10. Электродвигатель по п.1, в котором подвижный элемент магнитного контура содержит подвижную шунтирующую часть, выполненную из магнитонепроводящего и ненамагничиваемого материала с магнитной связью с закрепленными постоянными магнитами и полюсными наконечниками и возможностью перемещения для регулирования магнитного поля от слабого к сильному.
11. Электродвигатель по п.10, в котором подвижная шунтирующая часть выполнена в виде поворотного шунтирующего кольца, цилиндрической формы, соосно с двигательным валом и с возможностью поворота вокруг оси, расположенной соосно с двигательным валом.
12. Электродвигатель по п.11, в котором поворотное шунтирующее кольцо имеет поворотную цилиндрическую форму с шунтирующими частями, разделенными первыми зазорами, проходящими от передней части к задней части, а закрепленные постоянные магниты имеют цилиндрическую форму с магнитными частями, разделенными вторыми зазорами, проходящими от передней части к задней части.
13. Электродвигатель по п.12, в котором поворотное шунтирующее кольцо расположено в полюсных наконечниках ротора, а закрепленные постоянные магниты расположены в поворотном шунтирующем кольце.
14. Электродвигатель по п.13, в котором полюсные наконечники имеют зазоры, выровненные со вторыми зазорами, расположенными между магнитными частями.
15. Электродвигатель по п.14, в котором первые зазоры в поворотном шунтирующем кольце
выполнены с возможностью вывода из выравнивания со вторыми зазорами в закрепленных постоянных магнитах и зазорами полюсных наконечников с созданием слабого магнитного поля для обеспечения возможности запуска индукционного двигателя и
выполнены с возможностью поворота во второе положение, при котором первые зазоры в поворотном шунтирующем кольце выровнены со вторыми зазорами в закрепленных постоянных магнитах и зазорами полюсных наконечников с созданием сильного магнитного поля, обеспечивающего эффективную работу в синхронном режиме.
16. Электродвигатель по п.1, в котором поворот поворотного элемента магнитного контура демпфирован посредством вязкой демпфирующей конструкции.
17. Электродвигатель по п.16, в котором конструкция вязкого демпфирования содержит лопасти, расположенные в камере с вязкой текучей средой.
18. Электродвигатель по п.16, в котором конструкция вязкого демпфирования содержит вязкую текучую среду в непосредственном контакте с поворотным элементом магнитного контура.
19. Реконфигурируемый бесщеточный электродвигатель переменного тока, запускаемый в асинхронном режиме с последующим переходом в более эффективный синхронный режим работы и содержащий:
статор, принимающий силовой сигнал переменного тока и создающий вращающееся статорное магнитное поле,
двигательный вал, проходящий через статор,
ротор, расположенный на двигательном валу и совершающий поворот вместе с ним, и содержащий:
индуктивные элементы для взаимодействия с вращающимся статорным магнитным полем с обеспечением асинхронного режима работы для запуска двигателя,
полюсные наконечники ротора, выполненные из магнитопроводящего ненамагничивающегося материала, и
по меньшей мере один поворотный постоянный магнит, расположенный в роторе и имеющий магнитную ось, параллельную двигательному валу, и магнитно взаимодействующий с полюсными наконечниками, и имеющий первое положение, приводящее к созданию слабого магнитного поля для обеспечения возможности запуска индукционного двигателя, и выполненный с возможностью поворота во второе положение, приводящее к созданию сильного магнитного поля для взаимодействия с вращающимся статорным магнитным полем с обеспечением эффективной работы в синхронном режиме,
при обеспечении задержки поворота указанного по меньшей мере одного поворотного постоянного магнита из положения слабого магнитного поля в положение сильного магнитного поля посредством вязкого демпфирования до достижения частоты вращения, достаточной для перехода в синхронный режим.
20. Реконфигурируемый бесщеточный электродвигатель переменного тока, запускаемый в асинхронном режиме с последующим переходом в более эффективный синхронный режим и содержащий:
статор, принимающий электрический сигнал переменного тока и создающий вращающееся статорное магнитное поле,
двигательный вал, проходящий через статор,
ротор, расположенный на двигательном валу и совершающий поворот вместе с ним, и содержащий:
стержни, образующие конструкцию короткозамкнутой обмотки для индуктивного взаимодействия с вращающимся статорным магнитным полем с обеспечением асинхронного режима работы для запуска двигателя,
полюсные наконечники ротора, выполненные из магнитопроводящего ненамагничивающегося материала,
по меньшей мере один закрепленный постоянный магнит, расположенный в роторе,
по меньшей мере одну поворотную шунтирующую часть, выполненную из магнитонепроводящего ненамагничиваемого материала, магнитно взаимодействующую с закрепленными постоянными магнитами и полюсными наконечниками и выполненную с возможностью поворота вокруг оси, расположенной параллельно двигательному валу для регулирования магнитного поля ротора от слабого магнитного поля для индуктивного запуска до сильного магнитного поля для обеспечения эффективной работы в синхронном режиме;
при обеспечении задержки поворота указанной по меньшей мере одной поворотной шунтирующей части из положения слабого магнитного поля в положение сильного магнитного поля посредством вязкого демпфирования до достижения частоты вращения, достаточной для перехода в синхронный режим работы.
| JP 2006254638 A, 21.09.2006 | |||
| JP 2005210826 A, 04.08.2005 | |||
| JP 2003088071 A, 20.03.2003 | |||
| US 5508576 A1, 16.04.1996 | |||
| KR 1020050116677 A, 13.12.2005 | |||
| Видоизменение прибора для определения по карте азимута и дальности | 1929 |
|
SU17751A1 |
| АСИНХРОННЫЙ РЕГУЛИРУЕМЫЙ ДВИГАТЕЛЬ | 1990 |
|
RU2031516C1 |

