[0001] Настоящая заявка испрашивает приоритет заявки на патент США с серийным номером 13/452,514, поданной 20 апреля 2012 года, и заявки на патент США с серийным номером 13/689,400, поданной 29 ноября 2012 года, которые включены в настоящий документ во всей своей полноте посредством ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к электродвигателям и, в частности, к асинхронному электродвигателю, содержащему выполненный с возможностью независимого вращения ротор на основе постоянных магнитов, имеющий реализуемое с возможностью изменения соединение с индуктивным ротором для перенастройки электродвигателя с работы при пуске в режиме асинхронного индукционного двигателя на работу после пуска в режиме синхронного двигателя для обеспечения эффективной работы.
Уровень техники
[0003] Предпочтительной формой электродвигателей являются бесщеточные асинхронные двигатели переменного тока. Роторы асинхронных двигателей содержат "клетку" (или короткозамкнутый ротор, похожий на "колесо для белки"), вращающуюся внутри статора. "Клетка" содержит стержни, проходящие в осевом направлении и расположенные под углом на расстоянии друг от друга по внешнему периметру ротора. Переменный ток, подаваемый на статор, приводит к вводу вращающегося магнитного поля статора в ротор, и это вращающееся поле индуктивно наводит в стержнях ток. Ток, наводимый в стержнях, создает индуцированное магнитное поле, которое взаимодействует с магнитным полем статора для получения крутящего момента и вращения, таким образом, ротора.
[0004] Введение тока в стержни требует отсутствия движения (или вращения) стержней синхронно с вращающимся магнитным полем статора, поскольку для электромагнитной индукции необходимо относительное перемещение (называемое проскальзыванием) между магнитным полем и проводником в этом поле. В результате, ротор должен проскальзывать относительно вращающегося магнитного поля статора для наведения тока в стержнях, чтобы вырабатывать крутящий момент, и поэтому индукционные двигатели называются асинхронными электродвигателями.
[0005] К сожалению, асинхронные электродвигатели низкой мощности не имеют высокой эффективности при расчетной рабочей скорости и даже имеют меньшую эффективность при меньших нагрузках, поскольку количество энергии, потребляемой статором, остается постоянным при таких меньших нагрузках.
[0006] Один из подходов к повышению эффективности асинхронного электродвигателя состоит в добавлении в конструкцию ротора постоянных магнитов. Пуск электродвигателя сначала происходит как у обычного асинхронного двигателя, но по мере достижения двигателем своей рабочей скорости магнитное поле статора взаимодействует с постоянными магнитами и электродвигатель переходит в синхронный режим. К сожалению, размеры постоянных магнитов ограничены, т.к. если постоянные магниты слишком большие, они мешают пуску электродвигателя. Такое ограничение размера ограничивает полезный эффект, получаемый от использования постоянных магнитов.
Раскрытие изобретения
[0007] Настоящее изобретение направлено на удовлетворение вышеуказанных и других потребностей путем предоставления гибридного асинхронного электродвигателя, который включает в себя индуктивный ротор и выполненный с возможностью независимого вращения ротор на основе постоянных магнитов. Индуктивный ротор представляет собой ротор типа "беличья клетка", постоянно соединенный с валом электродвигателя для работы при пуске в режиме асинхронного электродвигателя. Ротор, выполненный на основе постоянных магнитов, смещен радиально или в осевом направлении относительно индуктивного ротора и имеет реализуемое с возможностью изменения соединение с индуктивным ротором (или с валом электродвигателя) через муфту, и обеспечен возможностью вращения при пуске независимо от индуктивного ротора. Выполненный с возможностью независимого вращения ротор на основе постоянных магнитов при пуске быстро достигает синхронного значения количества оборотов в минуту. По мере приближения количества оборотов в минуту индуктивного ротора к синхронному значению или достижения количества оборотов в минуту индуктивным ротором синхронного значения, соединение между индуктивным ротором и внутренним ротором, выполненным на основе постоянных магнитов, увеличивается до тех пор, пока два ротора не будут соединены и вращаться при синхронном значении количества оборотов в минуту, а электродвигатель не перейдет в режим работы по существу синхронного двигателя.
[0008] В одном варианте осуществления внутренний ротор, выполненный на основе постоянных магнитов, соединен с индуктивным ротором через обеспечивающую дискретные положения муфту скольжения, реализующую при вращении дискретные угловые положения выравнивания между ротором, выполненным на основе постоянных магнитов, и индуктивным ротором.
[0009] В соответствии с одним аспектом настоящего изобретения предложен гибридный асинхронный электродвигатель, включающий в себя внешний индуктивный ротор и свободного вращающийся внутренний ротор, выполненный на основе постоянных магнитов, который выполнен с возможностью свободного вращения с вращающимся магнитным потоком статора. При подаче питания к электродвигателю внутренний ротор, выполненный на основе постоянных магнитов, немедленно ускоряется, чтобы не отставать от вращающегося магнитного поля, и при этом скорости внешнего индуктивного ротора и нагрузки выравниваются. По мере приближения количества оборотов в минуту внешнего индуктивного ротора к синхронному значению (оборотов в минуту магнитного поля статора и внутреннего ротора, выполненного на основе постоянных магнитов) фиксирующая муфта блокировки входит во взаимодействие и синхронизирует внешний индуктивный ротор с внутренним ротором, выполненным на основе постоянных магнитов. Муфта блокировки осуществляет фиксирование при небольшом превышении расчетного крутящего момента электродвигателя, любое превышение нагрузки приводит к расфиксированию муфты и началу ее проскальзывания, пока нагрузка не вернется к околосинхронной скорости. Фиксирования муфты рассчитаны на проскакивание при определенной частоте из рабочего проскальзывания и ввод во взаимодействие в пределах рабочей частоты.
[0010] В соответствии с другим аспектом настоящего изобретения предложен гибридный асинхронный электродвигатель, включающий в себя внутренний ротор, выполненный на основе постоянных магнитов, соединенный с вращающимся магнитным полем статора. Ротор, выполненный на основе постоянных магнитов, достигает синхронного значения количества оборотов в минуту раньше внешнего индуктивного ротора с необходимостью преодоления только первоначального трения муфты скольжения (крутящий момент муфты установлен на максимальный крутящий момент расчетной мощности двигателя) и инерцию самого внутреннего ротора, выполненного на основе постоянных магнитов.
[0011] В соответствии еще с одним аспектом настоящего изобретения предложен внешний индуктивный ротор, включающий в себя демпферные обмотки, который ускоряется как обычный ротор асинхронного электродвигателя без какого-либо отрицательного влияния постоянных магнитов или переходного прерывания крутящего момента, и получающий преимущество от положительно приложенного крутящего момента, создаваемого внутренним ротором, выполненным на основе постоянных магнитов, через муфту скольжения, что способствует увеличению пускового крутящего момента. Такие демпферные обмотки обеспечивают создание крутящего момента без флуктуации или пульсации, свойственной электродвигателям с непосредственным пуском и постоянными магнитами (LSPM) во время пуска.
[0012] В соответствии еще с одним аспектом настоящего изобретения предложен гибридный асинхронный электродвигатель, который является саморегулирующимся и позволяет избежать магнитной перегрузки или потери оборотов, если приложена слишком большая нагрузка. При приближении электродвигателя к состоянию магнитной перегрузки или потере оборотов ротор, выполненный на основе постоянных магнитов, выходит из взаимодействия с индуктивным ротором и сохраняет синхронное значение оборотов в минуту, индуктивный ротор и ротор, выполненный на основе постоянных магнитов, снова соединяются, когда переходное или неустановившееся событие завершается.
[0013] В соответствии еще с одним аспектом настоящего изобретения предложен гибридный асинхронный электродвигатель, в котором можно безопасно использовать ферритовые магниты, поскольку механизм муфты не подвергает магниты воздействию больших коэрцитивных размагничивающих сил, потому что муфта обеспечивает вращение ротора, выполненного на основе постоянных магнитов, с синхронной скоростью до тех пор, пока не будет осуществлено управление чрезмерной нагрузкой.
Краткое описание чертежей
[0014] Вышеуказанные и другие аспекты, признаки и преимущества настоящего изобретения будут более очевидными из следующего более конкретного их описания, представленного в сочетании со следующими чертежами, на которых:
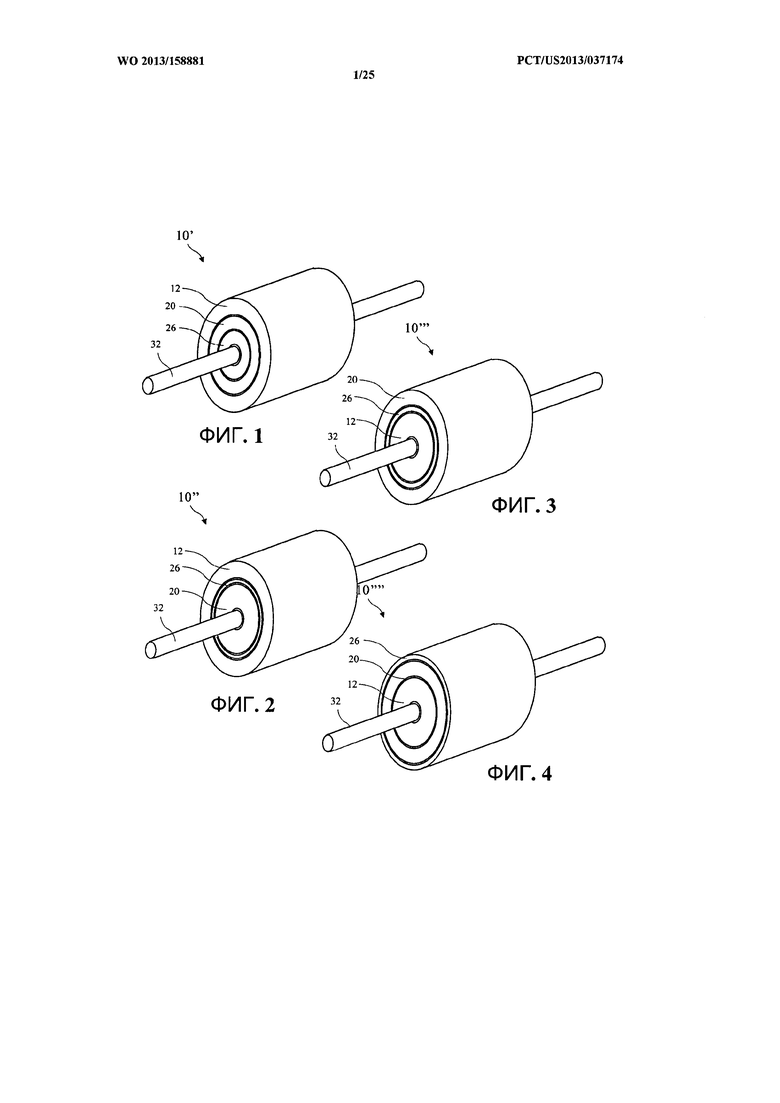
[0015] На ФИГ. 1 показан вариант реализации конфигурации электродвигателя, имеющего выполненный с возможностью независимого вращения внутренний ротор на основе постоянных магнитов, индуктивный ротор, жестко соединенный с валом электродвигателя и размещенный с внешней стороны ротора на основе постоянных магнитов, и статор, размещенный с внешней стороны индуктивного ротора, в соответствии с настоящим изобретением.
[0016] На ФИГ. 2 показан вариант реализации конфигурации электродвигателя, имеющего индуктивный ротор, соединенный с валом электродвигателя, выполненный с возможностью независимого вращения ротор на основе постоянных магнитов, размещенный с внешней стороны индуктивного ротора, и статор, размещенный с внешней стороны ротора, выполненного на основе постоянных магнитов, в соответствии с настоящим изобретением.
[0017] На ФИГ. 3 показан вариант реализации конфигурации электродвигателя, имеющего статор внутри роторов, выполненный с возможностью независимого вращения ротор на основе постоянных магнитов, размещенный с внешней стороны статора, и индуктивный ротор, соединенный с нагрузкой и размещенный с внешней стороны ротора, выполненного на основе постоянных магнитов, и статора, в соответствии с настоящим изобретением.
[0018] На ФИГ. 4 показан вариант реализации конфигурации электродвигателя, имеющего статор внутри роторов, индуктивный ротор, соединенный с нагрузкой и размещенный с внешней стороны статора, и выполненный с возможностью независимого вращения ротор на основе постоянных магнитов, размещенный с внешней стороны индуктивного ротора, в соответствии с настоящим изобретением.
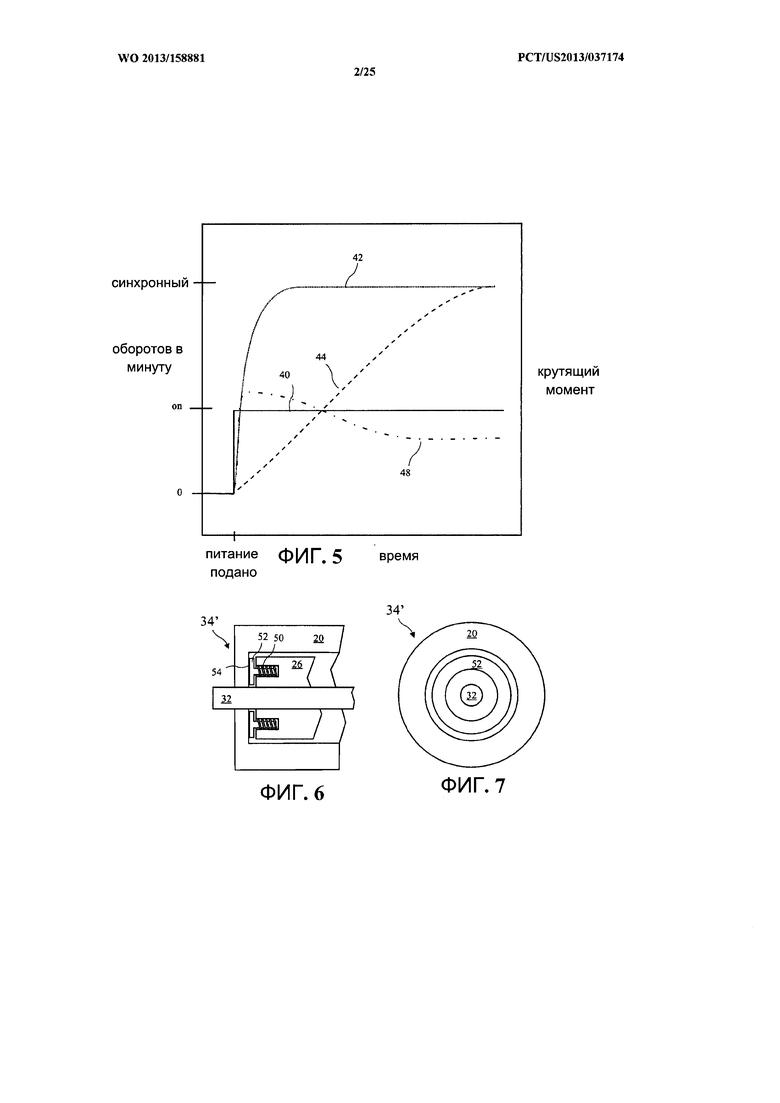
[0019] На ФИГ. 5 показано отношение значения количества оборотов в минуту к крутящему моменту индуктивного ротора и ротора, выполненного на основе постоянных магнитов.
[0020] На ФИГ. 6 показан вид сбоку муфты скольжения непрерывного действия в соответствии с настоящим изобретением.
[0021] На ФИГ. 7 показан вид с торца муфты скольжения непрерывного действия в соответствии с настоящим изобретением.
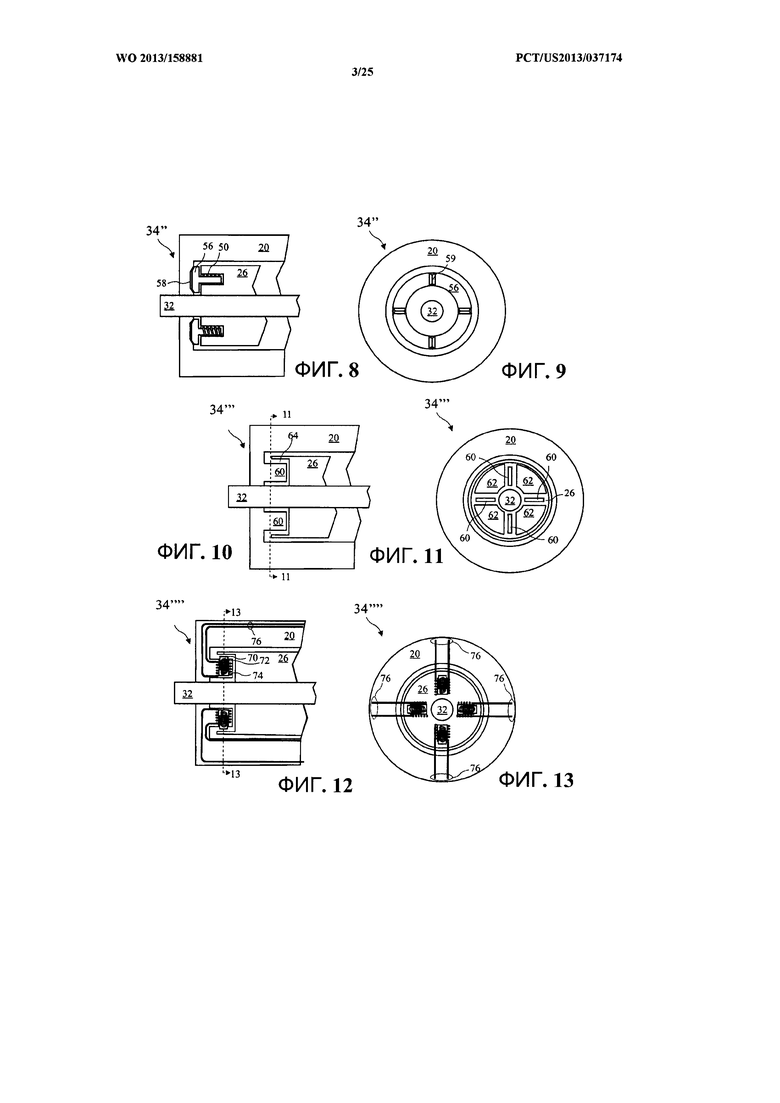
[0022] На ФИГ. 8 показан вид сбоку муфты скольжения дискретного действия в соответствии с настоящим изобретением.
[0023] На ФИГ. 9 показан вид с торца муфты скольжения дискретного действия в соответствии с настоящим изобретением.
[0024] На ФИГ. 10 показан вид сбоку центробежной муфты соединяющей ротор, выполненный на основе постоянных магнитов, и индуктивный ротор в соответствии с настоящим изобретением.
[0025] На ФИГ. 11 показано сечение центробежной муфты соединяющей ротор, выполненный на основе постоянных магнитов, и индуктивный ротор, полученное по линии 11-11 согласно ФИГ. 10 в соответствии с настоящим изобретением.
[0026] На ФИГ. 12 показан вид сбоку электромагнитной муфты соединяющей ротор, выполненный на основе постоянных магнитов, и индуктивный ротор в соответствии с настоящим изобретением.
[0027] На ФИГ. 13 показано сечение электромагнитной муфты соединяющей ротор, выполненный на основе постоянных магнитов, и индуктивный ротор, полученное по линии 13-13 согласно ФИГ. 12 в соответствии с настоящим изобретением.
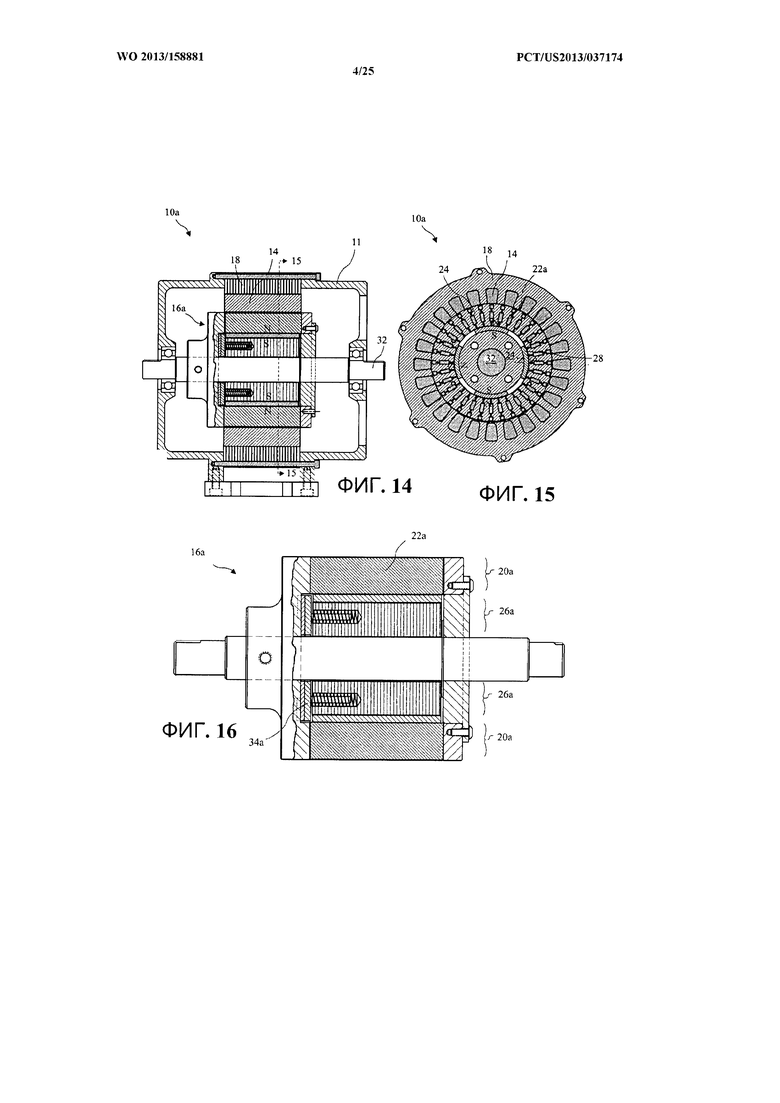
[0028] На ФИГ. 14 показан вид сбоку первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0029] На ФИГ. 15 показано сечение первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0030] На ФИГ. 16 показан более подробный вид сбоку первого ротора первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0031] На ФИГ. 17 показан вид сбоку первого индуктивного ротора первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0032] На ФИГ. 18 показано сечение первого индуктивного ротора первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0033] На ФИГ. 19А показан вид сбоку первого ротора, выполненного на основе постоянных магнитов, первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0034] На ФИГ. 19 В показан вид с торца первого ротора, выполненного на основе постоянных магнитов, первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0035] На ФИГ. 20 показано сечение первого ротора, выполненного на основе постоянных магнитов, первого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 20-20 согласно ФИГ. 19А.
[0036] На ФИГ. 21 показаны линии магнитного поля первого статора первого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0037] На ФИГ. 22 показан вид сбоку второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0038] На ФИГ. 23 показано сечение второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0039] На ФИГ. 24 показан подробный вид сбоку второго ротора второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0040] На ФИГ. 25 показан вид сбоку второго индуктивного ротора второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0041] На ФИГ. 26 показано сечение второго индуктивного ротора второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0042] На ФИГ. 27А показан вид сбоку второго ротора, выполненного на основе постоянных магнитов, второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0043] На ФИГ. 27В показан вид с торца второго ротора, выполненного на основе постоянных магнитов, второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0044] На ФИГ. 28 показано сечение второго ротора, выполненного на основе постоянных магнитов, второго варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 28-28 согласно ФИГ. 27А.
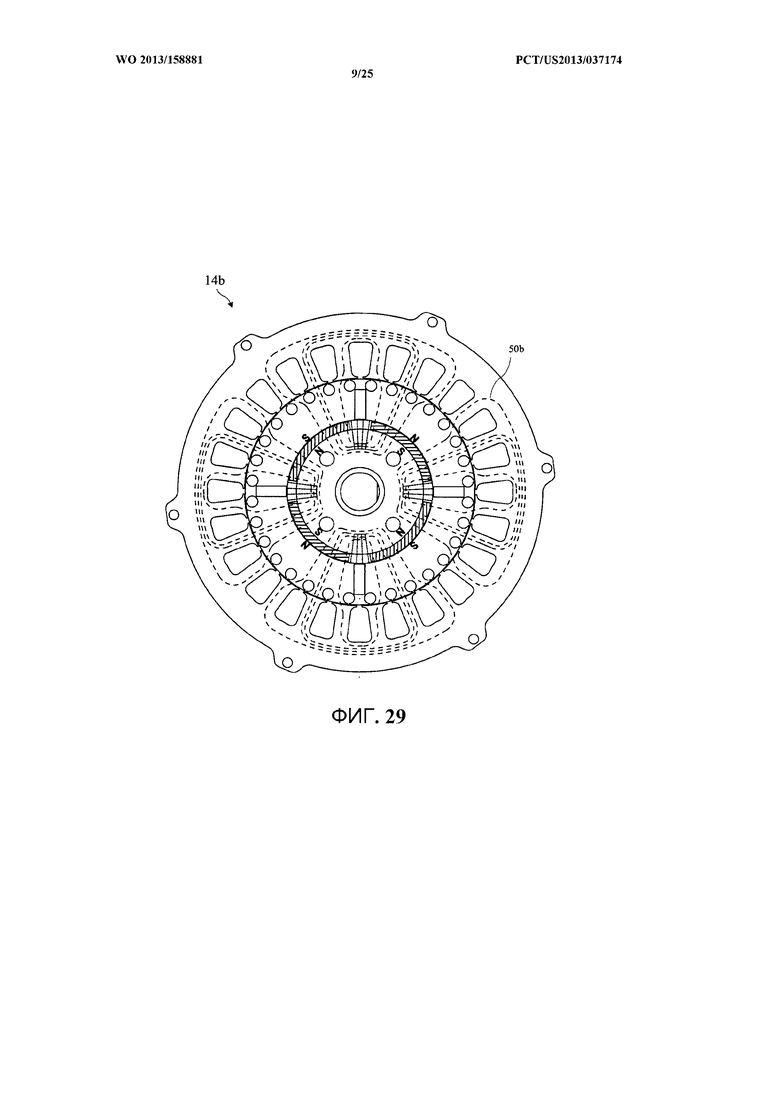
[0045] На ФИГ. 29 показаны линии магнитного поля статора ротора, выполненного на основе постоянных магнитов, второго варианта реализации электродвигателя в соответствии с настоящим изобретением.
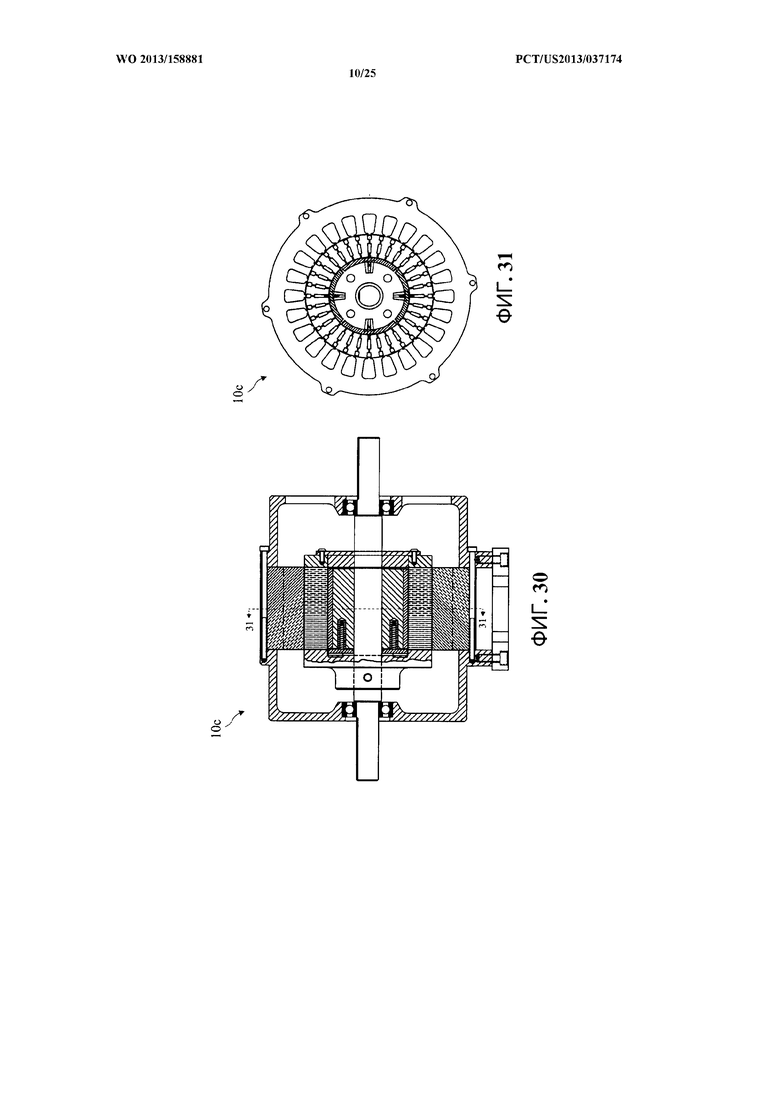
[0046] На ФИГ. 30 показан вид сбоку третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0047] На ФИГ. 31 показано сечение третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
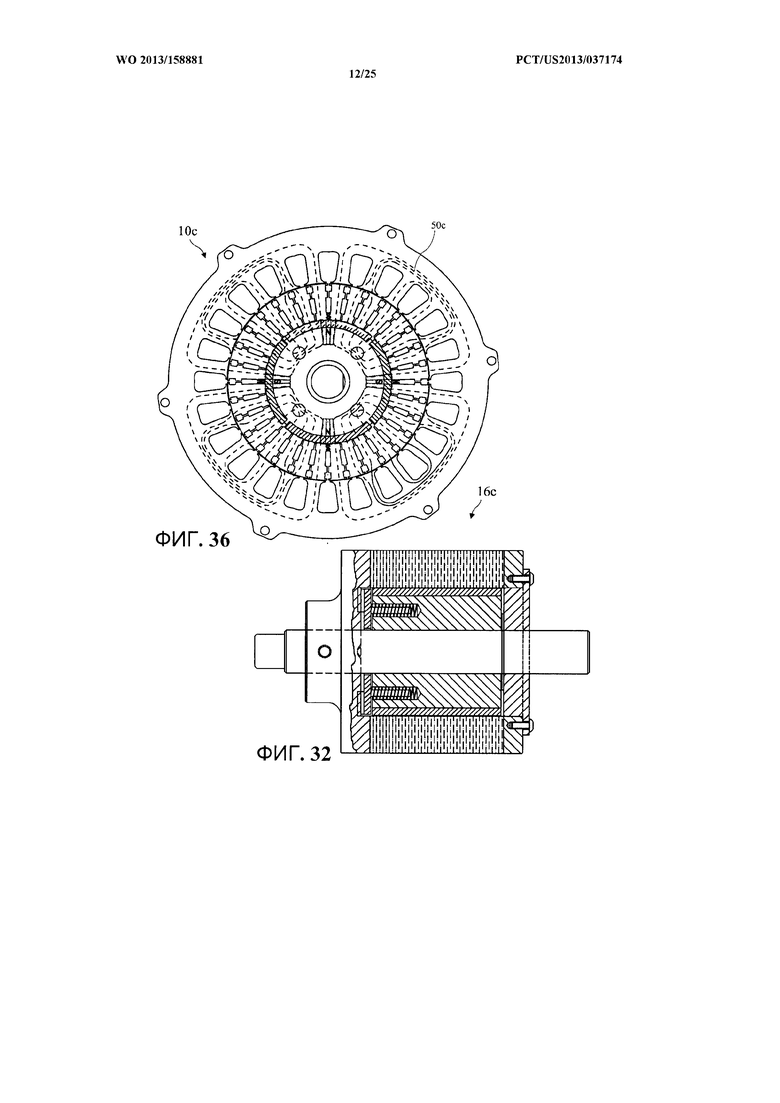
[0048] На ФИГ. 32 показан подробный вид сбоку третьего ротора третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
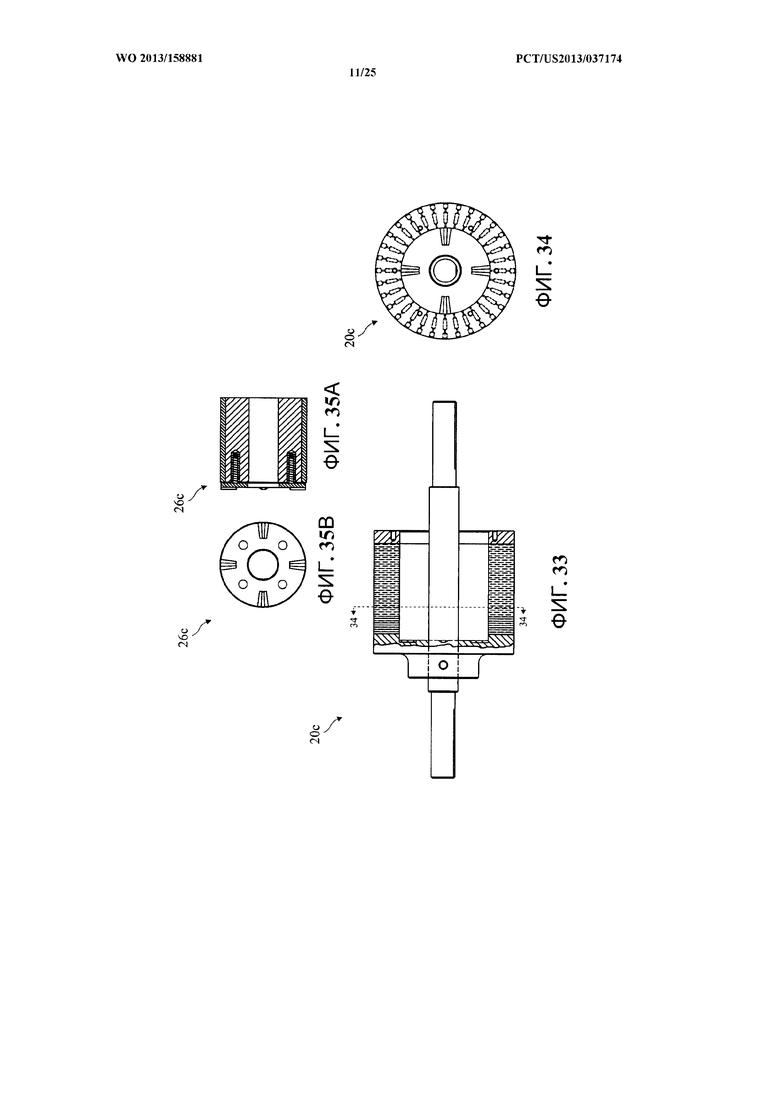
[0049] На ФИГ. 33 показан вид сбоку третьего индуктивного ротора третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0050] На ФИГ. 34 показано сечение третьего индуктивного ротора третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0051] На ФИГ. 35А показан вид сбоку третьего ротора, выполненного на основе постоянных магнитов, третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0052] На ФИГ. 35В показан вид с торца третьего ротора, выполненного на основе постоянных магнитов, третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0053] На ФИГ. 36 показаны линии магнитного поля статора ротора, выполненного на основе постоянных магнитов, третьего варианта реализации электродвигателя в соответствии с настоящим изобретением.
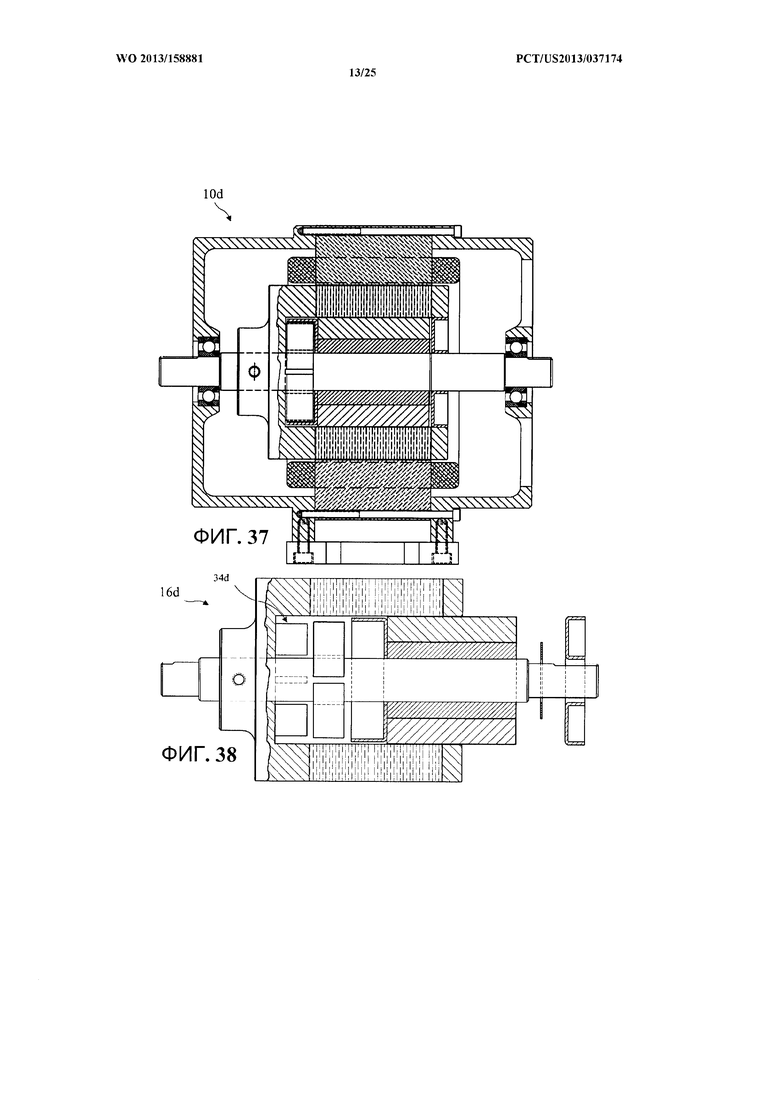
[0054] На ФИГ. 37 показан вид сбоку четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0055] На ФИГ. 38 показан покомпонентный вид четвертого ротора четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением.
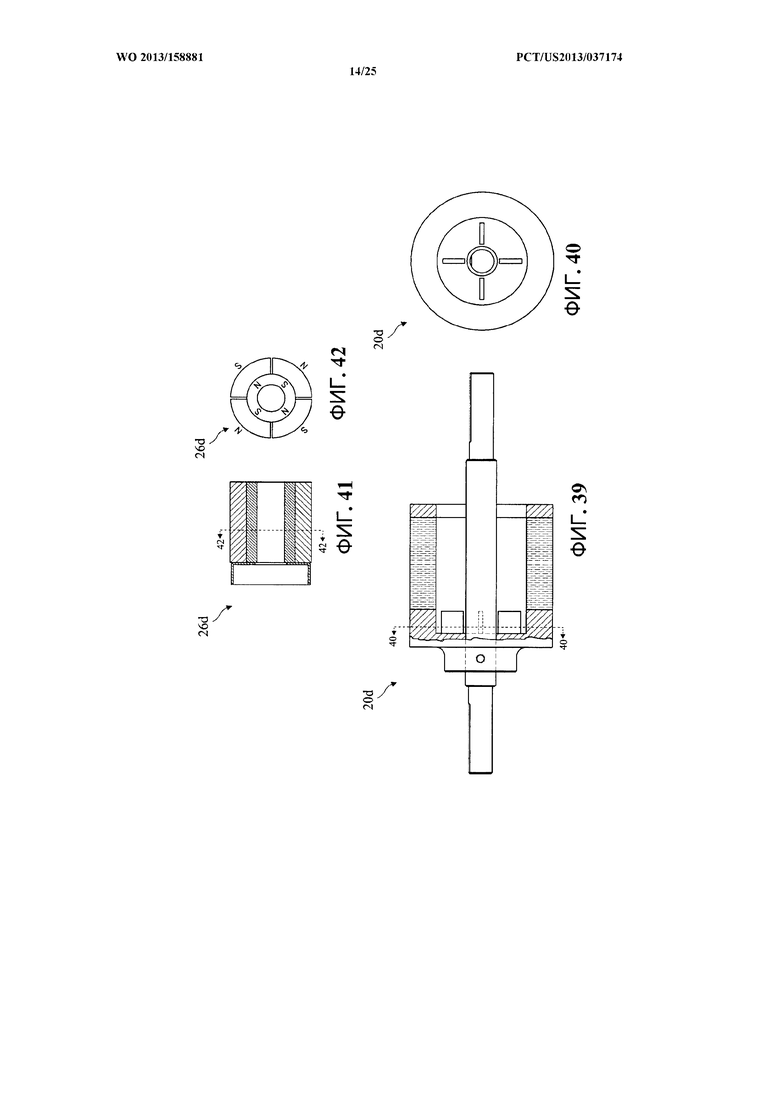
[0056] На ФИГ. 39 показан вид сбоку четвертого индуктивного ротора четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0057] На ФИГ. 40 показано сечение четвертого индуктивного ротора четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0058] На ФИГ. 41 показан вид сбоку четвертого ротора, выполненного на основе постоянных магнитов, четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0059] На ФИГ. 42 показано сечение четвертого ротора, выполненного на основе постоянных магнитов, четвертого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 42-42 согласно ФИГ. 41.
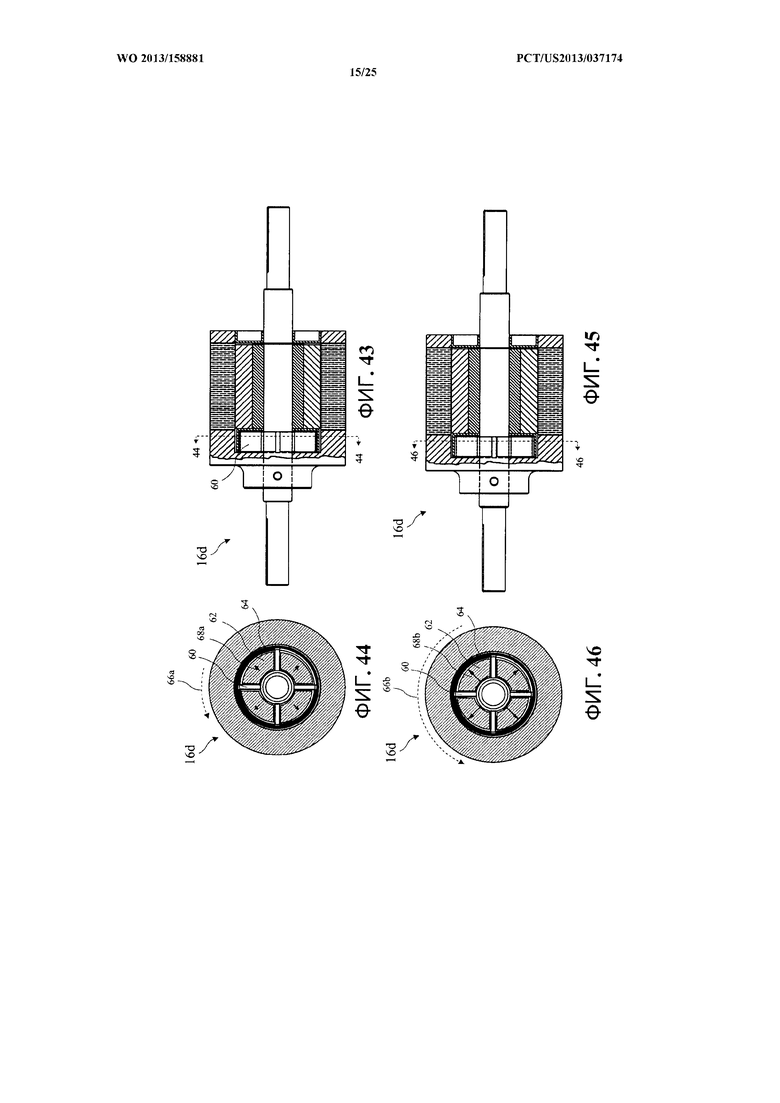
[0060] На ФИГ. 43 показан вид сбоку четвертого ротора при низких оборотах в минуту с проскальзывающей центробежной муфтой;
[0061] На ФИГ. 44 показано сечение четвертого ротора, полученное по линии 44-44 согласно ФИГ. 43.
[0062] На ФИГ. 45 показан вид сбоку четвертого ротора при высоких оборотах в минуту с центробежной муфтой, введенной во взаимодействие;
[0063] На ФИГ. 46 показано сечение четвертого ротора, полученное по линии 46-46 согласно ФИГ. 45.
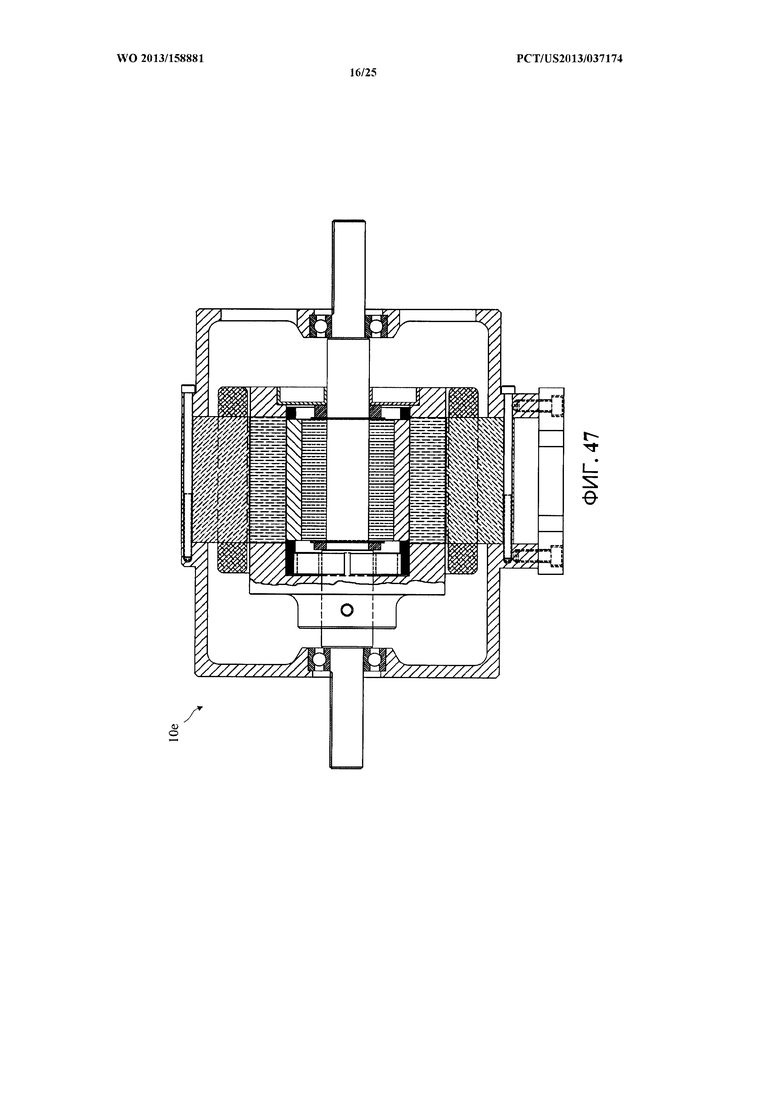
[0064] На ФИГ. 47 показан вид сбоку пятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
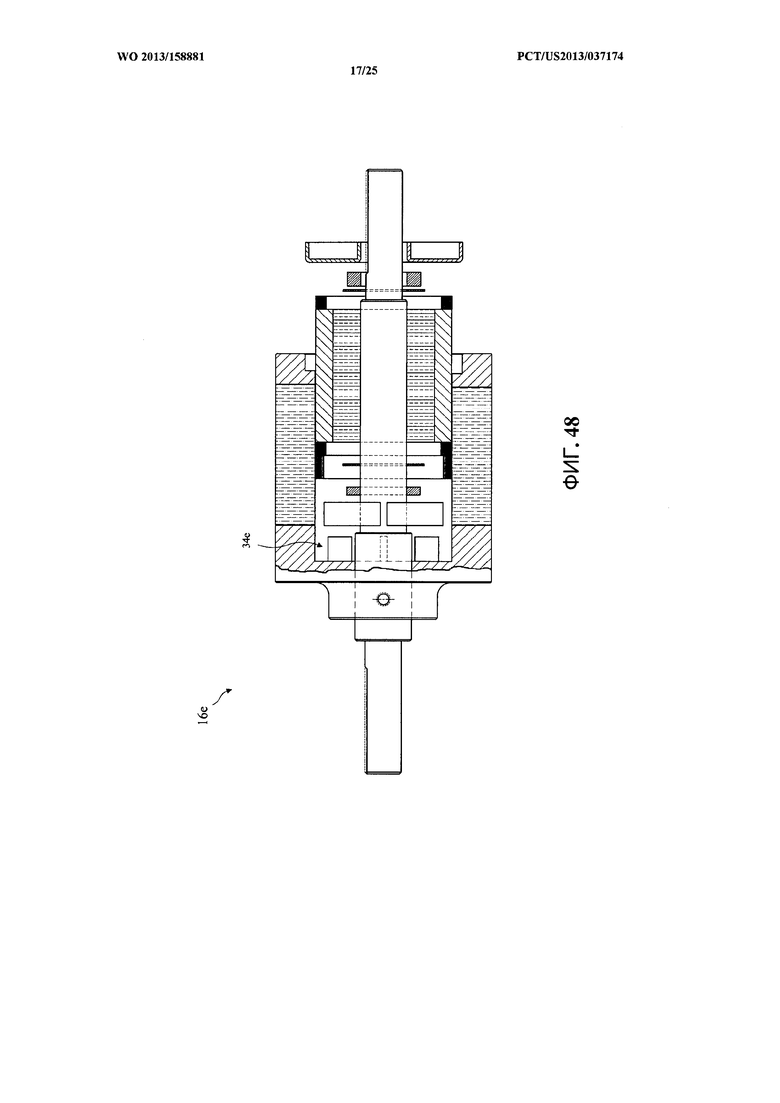
[0065] На ФИГ. 48 показан покомпонентный вид пятого ротора пятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
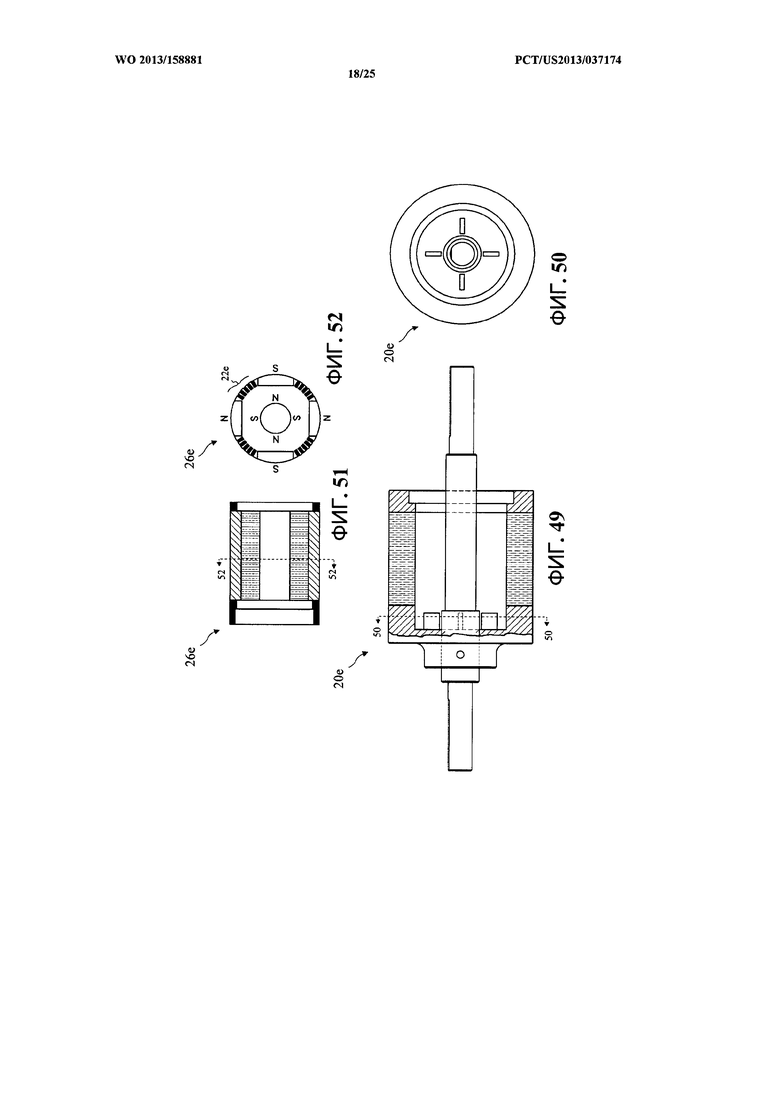
[0066] На ФИГ. 49 показан вид сбоку пятого индуктивного ротора пятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0067] На ФИГ. 50 показано сечение пятого индуктивного ротора пятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0068] На ФИГ. 51 показан вид сбоку пятого ротора, выполненного на основе постоянных магнитов, пятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0069] На ФИГ. 52 показано сечение пятого ротора, выполненного на основе постоянных магнитов, пятого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 52-52 согласно ФИГ. 51.
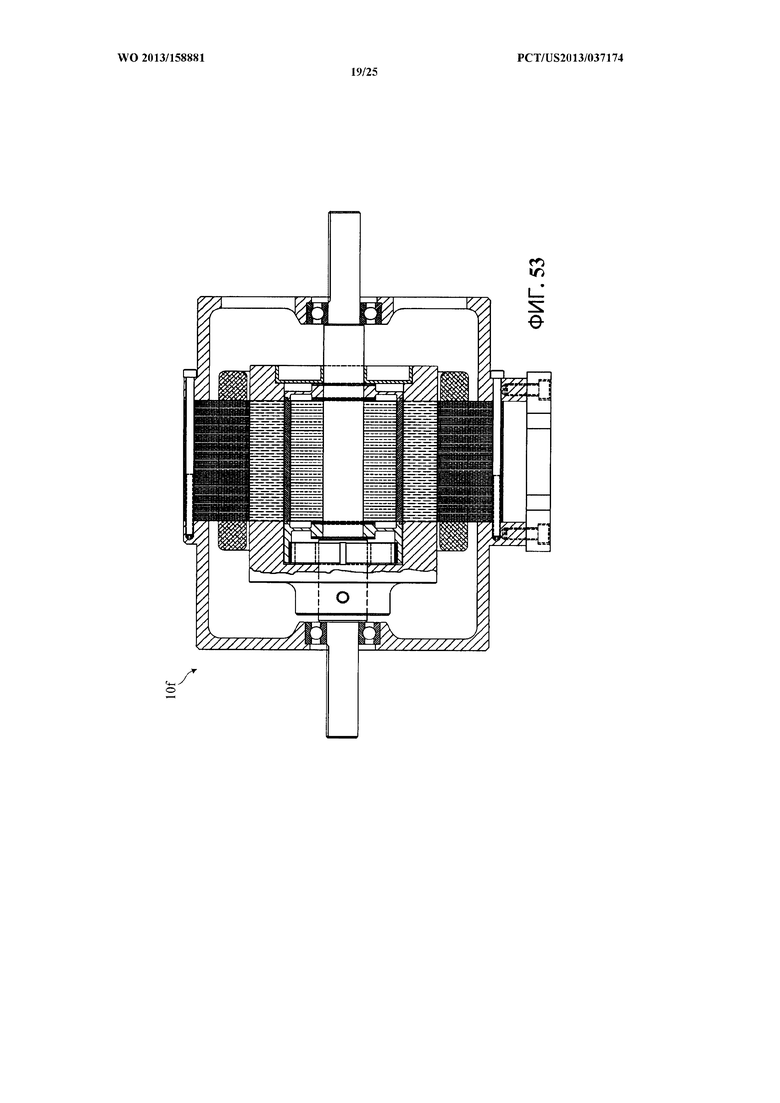
[0070] На ФИГ. 53 показан вид сбоку шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
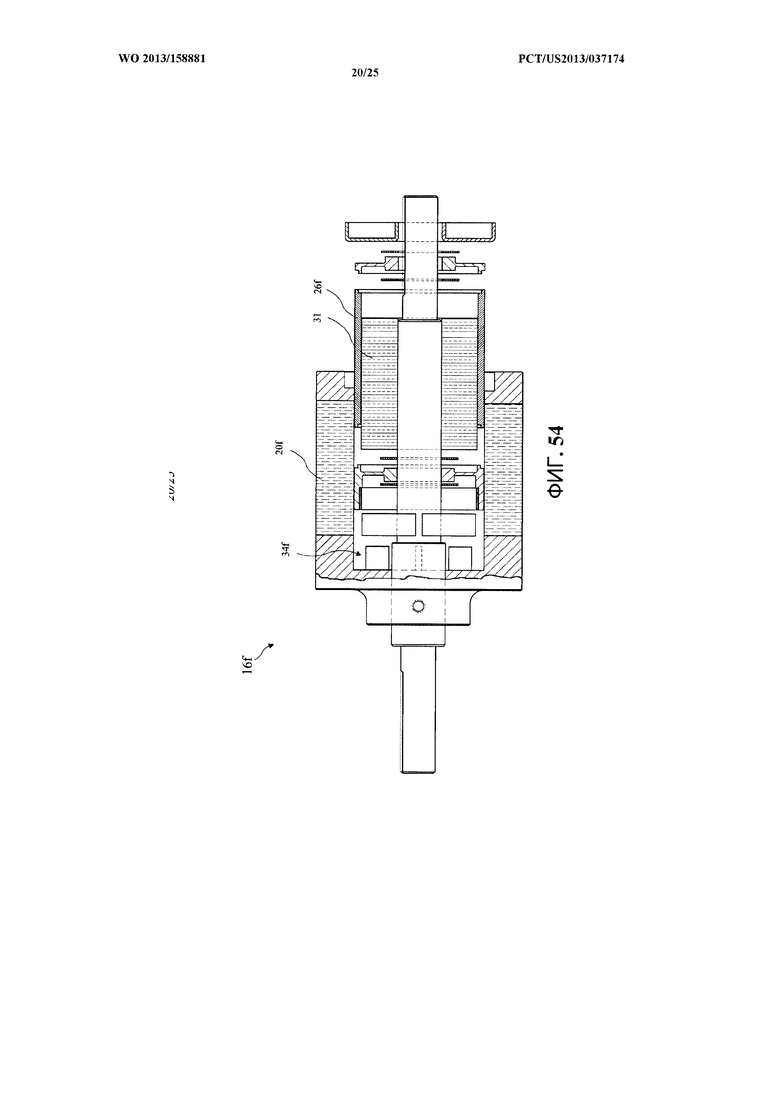
[0071] На ФИГ. 54 показан покомпонентный вид шестого ротора шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
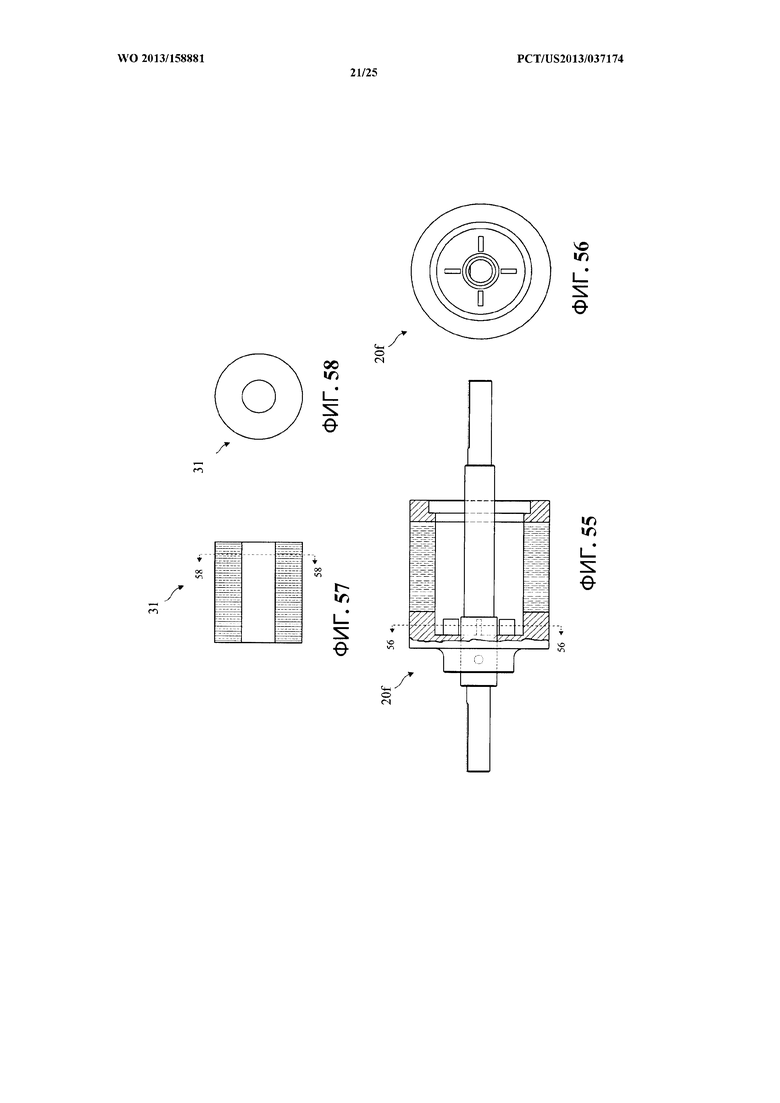
[0072] На ФИГ. 55 показан вид сбоку шестого индуктивного ротора шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0073] На ФИГ. 56 показано сечение шестого индуктивного ротора шестого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 56-56 согласно ФИГ. 55.
[0074] На ФИГ. 57 показан вид сбоку слоистого сердечника шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0075] На ФИГ. 58 показано сечение слоистого сердечника шестого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 58-58 согласно ФИГ. 57.
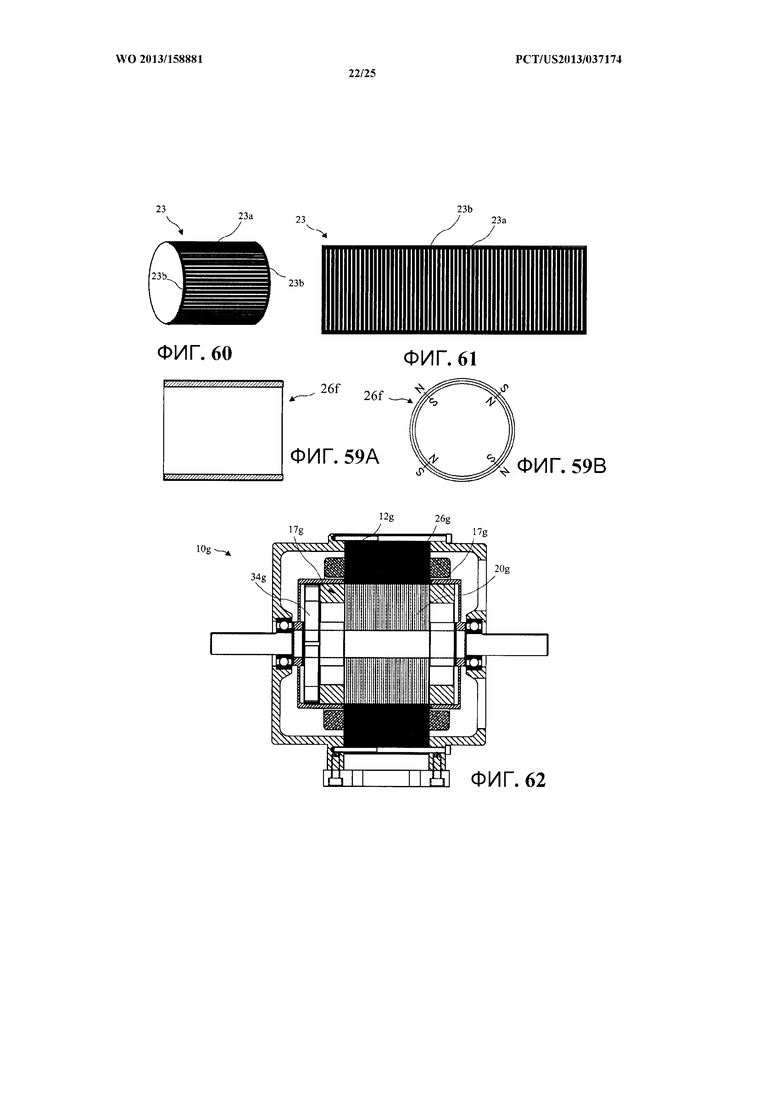
[0076] На ФИГ. 59А показан вид сбоку шестого ротора, выполненного на основе постоянных магнитов, шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0077] На ФИГ. 59В показан вид с торца шестого ротора, выполненного на основе постоянных магнитов, шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0078] На ФИГ. 60 показан перспективный вид индуктивной полоски для обертывания вокруг шестого ротора на основе постоянных магнитов шестого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0079] На ФИГ. 61 показана индуктивная полоска в развернутом состоянии в соответствии с настоящим изобретением.
[0080] На ФИГ. 62 показан вид сбоку седьмого варианта реализации электродвигателя в соответствии с настоящим изобретением.
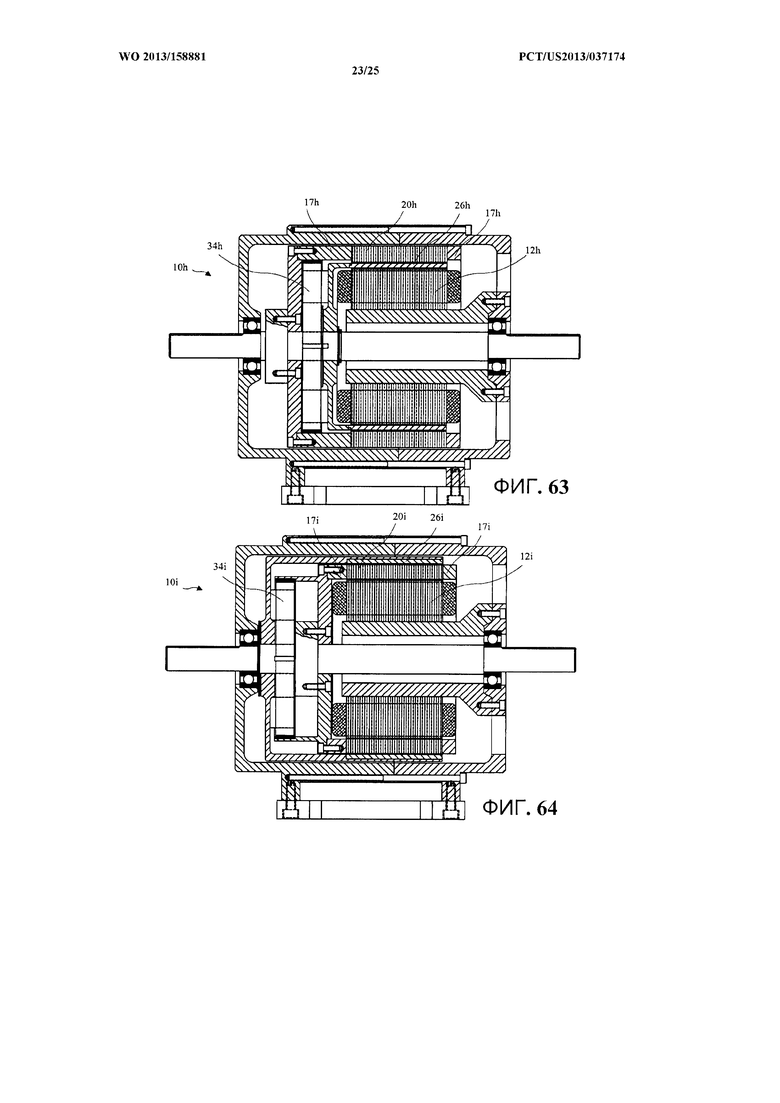
[0081] На ФИГ. 63 показан вид сбоку восьмого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0082] На ФИГ. 64 показан вид сбоку девятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
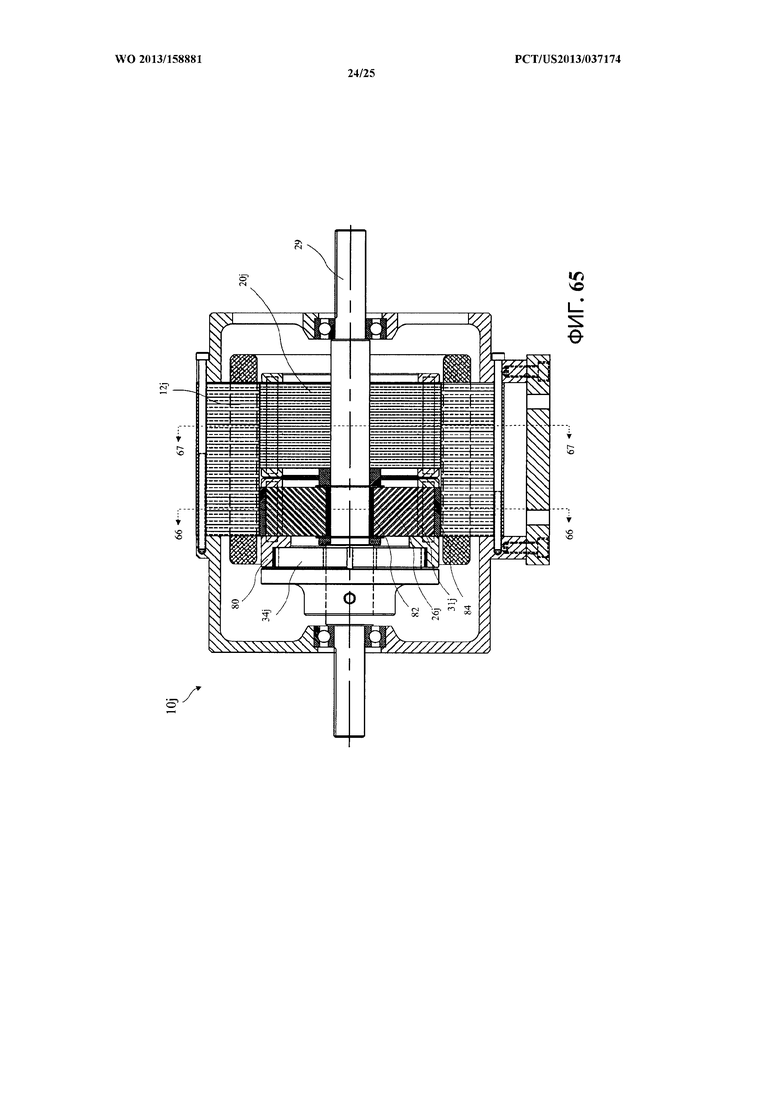
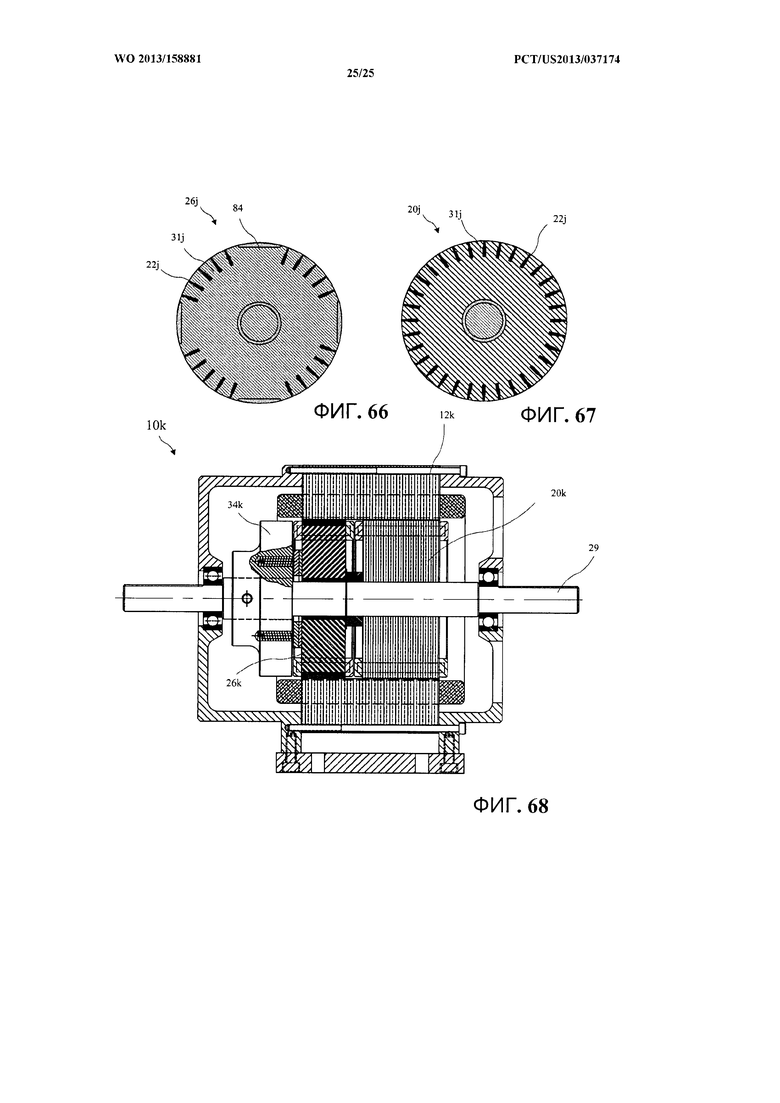
[0083] На ФИГ. 65 показан вид сбоку десятого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0084] На ФИГ. 66 показано сечение выполненного с возможностью независимого вращения ротора на основе постоянных магнитов, включающего в себя стержни, десятого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 66-66 согласно ФИГ. 65.
[0085] На ФИГ. 67 показано сечение индукционного ротора десятого варианта реализации электродвигателя в соответствии с настоящим изобретением, полученное по линии 67-67 согласно ФИГ. 65.
[0086] На ФИГ. 68 показан вид сбоку одиннадцатого варианта реализации электродвигателя в соответствии с настоящим изобретением.
[0087] Соответствующие ссылочные позиции указывают на соответствующие компоненты на нескольких видах чертежей.
Лучший вариант осуществления изобретения
[0088] Далее описан вариант реализации изобретения, который в настоящее время считается наилучшим. Это описание не следует рассматривать в ограничительном смысле, поскольку оно приведено только с целью описания одного или более предпочтительных вариантов осуществления изобретения. Объем изобретения должен быть определен со ссылкой на формулу изобретения.
Конструкции индуктивного ротора и ротора на основе постоянных магнитов
[0089] На ФИГ. 1 показана первая конфигурация 10' электродвигателя, имеющего выполненный с возможностью независимого вращения внутренний ротор 26 на основе постоянных магнитов, индуктивный ротор 20, соединенный с валом 32 электродвигателя (или другой нагрузкой) и размещенный с внешней стороны ротора 26 на основе постоянных магнитов, и статор 12, размещенный с внешней стороны индуктивного ротора 20, в соответствии с настоящим изобретением. Выполненный с возможностью независимого вращения внутренний ротор 26 на основе постоянных магнитов имеет реализуемое с возможностью изменения соединение с индуктивным ротором 20. Реализуемое с возможностью изменения соединение обеспечивает при пуске двигателя 10' очень быстрое вращательное ускорение выполненного с возможностью независимого вращения внутреннего ротора 26 на основе постоянных магнитов до синхронной скорости, независимо от индуктивного ротора 20, который соединен с нагрузкой и вращательно ускоряется медленнее, чем внутренний ротор 26 на основе постоянных магнитов. Реализуемое с возможностью изменения соединение может быть реализовано в форме муфты скольжения, центробежной муфты или электрически управляемой муфты, как описано в следующих параграфах. После приближения индуктивного ротора 20 к синхронной скорости индуктивный ротор 20 и ротор 26 на основе постоянных магнитов осуществляют фиксирование для работы в синхронном режиме, а беличья клетка в индуктивном роторе 20 прекращает генерировать ток вследствие недостатка проскальзывания между вращающимся магнитным полем статора и стержнями беличьей клетки, при этом электродвигатель 10' работает как эффективный двигатель, выполненный на основе постоянных магнитов.
[0090] На ФИГ. 2 показана вторая конфигурация 10'' электродвигателя, имеющего индуктивный ротор 20, соединенный с валом 32 электродвигателя, выполненный с возможностью независимого вращения ротор 26 на основе постоянных магнитов, размещенный с внешней стороны индуктивного ротора, и статор 12, размещенный с внешней стороны выполненного с возможностью независимого вращения ротора 26 на основе постоянных магнитов, в соответствии с настоящим изобретением. Конфигурация 10'' электродвигателя схожа в целом с конфигурацией 10' электродвигателя за исключением того, что ротор 26 на основе постоянных магнитов размещен с внешней стороны индуктивного ротора 20 (т.е. размещен между индуктивным ротором 20 и статором 12). Ротор 26 на основе постоянных магнитов предпочтительно содержит кольцевой магнит.
[0091] На ФИГ. 3 показана третья конфигурация 10''' электродвигателя, имеющая статор 12 внутри роторов 20 и 26, выполненный с возможностью независимого вращения ротор 26 на основе постоянных магнитов, размещенный с внешней стороны статора 12, и индуктивный ротор 20, соединенный с нагрузкой и размещенный с внешней стороны ротора 26, выполненного на основе постоянных магнитов, и статора 12, в соответствии с настоящим изобретением. Конфигурация 10''' электродвигателя схожа в целом с конфигурацией 10' электродвигателя за исключением того, что статор 12 размещен внутри обоих роторов 20 и 26, а ротор 26, выполненный на основе постоянных магнитов, предпочтительно представляет собой кольцевой магнит, расположенный между статором 12 и индуктивным ротором 20.
[0092] На ФИГ. 4 показана четвертая конфигурация 10'''' электродвигателя, имеющая статор 12 внутри роторов 20 и 26, индуктивный ротор 20, соединенный с нагрузкой и размещенный с внешней стороны статора 12, и выполненный с возможностью независимого вращения ротор 26 на основе постоянных магнитов, размещенный с внешней стороны индуктивного ротора 20, в соответствии с настоящим изобретением. Конфигурация 10'''' электродвигателя схожа в целом с конфигурацией 10' электродвигателя за исключением того, что статор 12 размещен внутри обоих роторов 20 и 26, а ротор 26, выполненный на основе постоянных магнитов, размещен с внешней стороны индуктивного ротора 20. Ротор 26, выполненный на основе постоянных магнитов, предпочтительно содержит кольцевой магнит.
[0093] Отношение значения количества оборотов в минуту к крутящему моменту индуктивного ротора 20 и ротора 26 на основе постоянных магнитов при пуске двигателя показано на ФИГ. 5. Крутящий момент 48 ротора на основе постоянных магнитов повышается очень быстро при подаче питания 40, обеспечивая преодоление любого соединения ротора 26, выполненного на основе постоянных магнитов, и его высвобождение от индуктивного ротора 20, при этом количество 42 оборотов в минуту ротора, выполненного на основе постоянных магнитов, быстро достигает синхронного значения. По мере приближения количества 44 оборотов в минуту индуктивного ротора к синхронному значению и при падении крутящего момента 48 ротор 26, выполненный на основе постоянных магнитов, и индуктивный ротор 20 осуществляют фиксирование с синхронным значением количества оборотов в минуту, и электродвигатель переходит в режим высокоэффективной работы на основе постоянных магнитов.
Варианты выполнения муфт, реализующих с возможностью изменения соединение индуктивного ротора с ротором на основе постоянных магнитов
[0094] Вид сбоку муфты 34' скольжения непрерывного действия в соответствии с настоящим изобретением показан на ФИГ. 6, и вид с торца муфты 34' скольжения непрерывного действия показан на ФИГ. 7. Муфта 34' скольжения непрерывного действия включает в себя кольцевую пластину 52, размещенную на роторе 26, выполненном на основе постоянных магнитов, и поджимаемую пружинами 50 к кольцевой поверхности 54 трения индукционного ротора 20. Муфта 34' скольжения непрерывного действия обеспечивает постоянное кинетическое трение посредством пружин 50, выбранных для обеспечения высвобождения ротора 26, выполненного на основе постоянных магнитов, из индукционного ротора при пуске, когда крутящий момент 48 ротора, выполненного на основе постоянных магнитов, (см. ФИГ. 5) достигает пикового значения, и обеспечивает фиксирование двух роторов 20 и 26 с синхронным значением количества оборотов в минуту, когда крутящий момент 48 ротора, выполненного на основе постоянных магнитов, падает.
[0095] Вид сбоку муфты 34'' скольжения дискретного действия в соответствии с настоящим изобретением показан на ФИГ. 8, а вид с торца муфты 34'' скольжения дискретного действия показан на ФИГ. 9. Муфта 34'' скольжения дискретного действия включает в себя равномерно расположенные на расстоянии друг от друга зубцы 59 на кольцевой пластине 56 и взаимодействующие с ними канавки 58, чтобы обеспечивать фиксирование муфты 34'' скольжения дискретного действия с выбранным взаимным отношением между ротором 26 на основе постоянных магнитов и индукционным ротором 20 для выравнивания полюсов ротора с магнитным полем статора. Такое дискретное выравнивание предпочтительно, когда ротор имеет небольшое количество полюсов, например, четыре полюса.
[0096] Вид сбоку центробежной муфты 34''', соединяющей ротор 26, выполненный на основе постоянных магнитов, с индуктивным ротором 20 в соответствии с настоящим изобретением показан на ФИГ. 10, и сечение центробежной муфты 34''', соединяющей ротор 26, выполненный на основе постоянных магнитов, и индуктивный ротор 20, полученное по линии 11-11 согласно ФИГ. 10, показано на ФИГ. 11. Лопатки 60, прикрепленные к индуктивному ротору 20, проходят в вогнутую цилиндрическую горловину 64 на одном конце ротора 26, выполненного на основе постоянных магнитов. Центробежные массовые элементы 62 расположены между лопатками 60 и удерживаются с возможностью вращения с индуктивным ротором 20. По мере приближения скорости вращения индуктивного ротора 20 к синхронному значению происходит толкание массовых элементов 62 к цилиндрической внутренней поверхности горловины 64 с фиксированием вращения ротора 26, выполненного на основе постоянных магнитов, с вращением индуктивного ротора 20.
[0097] Вид сбоку электромагнитной муфты 34'''', соединяющей ротор 26, выполненный на основе постоянных магнитов, и индуктивный ротор 20 в соответствии с настоящим изобретением, показан на ФИГ. 12, и сечение электромагнитной муфты 34'''', соединяющей ротор 26, выполненный на основе постоянных магнитов, и индуктивный ротор 20, полученное по линии 13-13 согласно ФИГ. 11, показано на ФИГ. 13. Электромагнитная муфта 34'''' включает в себя катушки (или соленоиды) 74, получающие ток через индуктивные обмотки 76 в индуктивном роторе 20. Катушка 74 отталкивает кулачки 70 сцепления от цилиндрической внутренней поверхности горловины 64, а пружина 72 толкает кулачки по направлению к цилиндрической внутренней поверхности горловины 64. Кулачки 70 могут кроме того содержать массовые элементы, схожие с массовыми элементами 62 по ФИГ. 11, чтобы увеличивать взаимодействие с цилиндрической внутренней поверхностью горловины 64 по мере увеличения количества оборотов в минуту индуктивного ротора. Ток, вырабатываемый обмотками 76, пропорционален разности между количеством оборотов в минуту индуктивного ротора и синхронным значением количества оборотов в минуту, и осуществляет, таким образом, вывод электромагнитной муфты 34''' из взаимодействия при пуске и ввод электромагнитной муфтой 34''' во взаимодействие по мере приближения количества оборотов в минуту индуктивного ротора к синхронному значению.
Конструкции двигателя, реализуемые настоящим изобретением
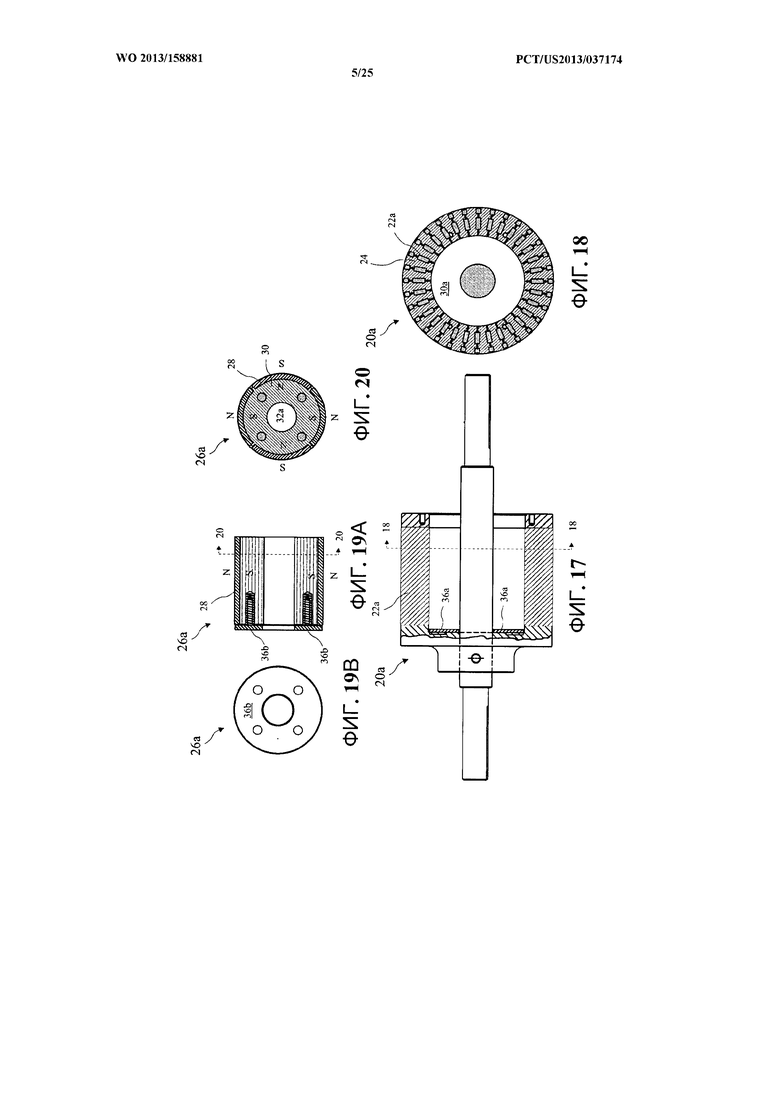
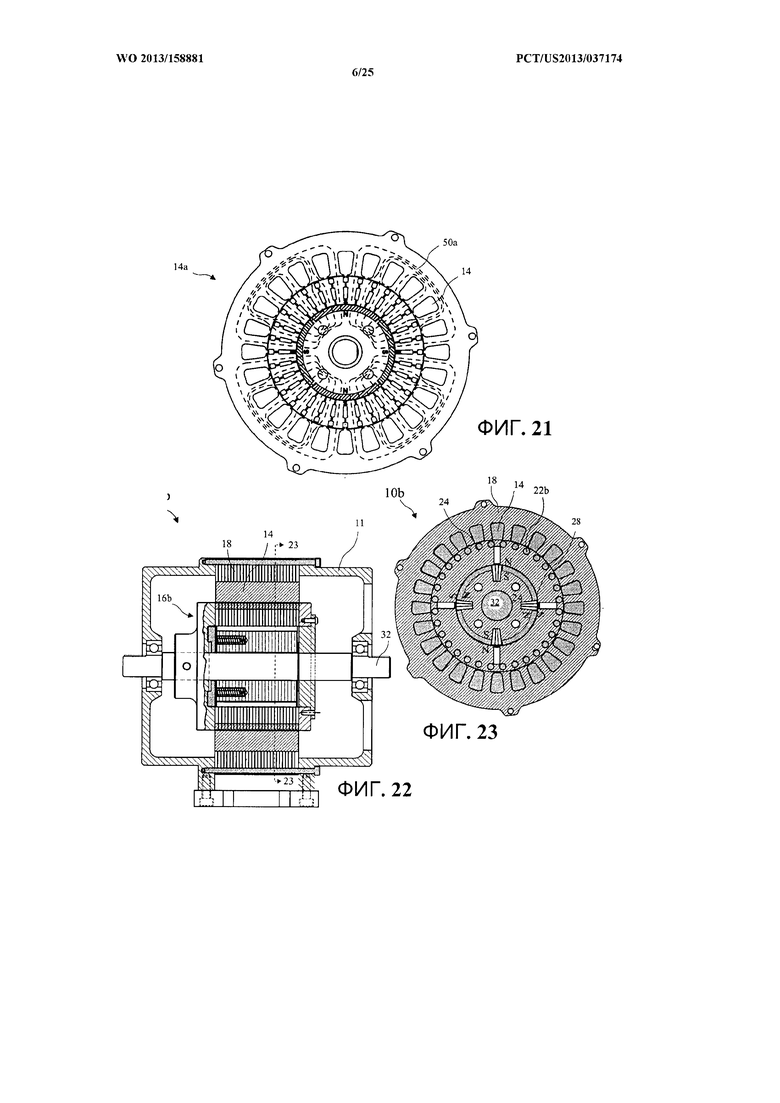
[0098] Вид сбоку первого электродвигателя 10а в соответствии с настоящим изобретением показан на ФИГ. 14, сечение первого электродвигателя 10а показано на ФИГ. 15, более подробный вид сбоку ротора первого электродвигателя 10а показан на ФИГ. 16, вид сбоку индуктивного ротора 20а первого электродвигателя 10а показан на ФИГ. 17, сечение индуктивного ротора 20а первого электродвигателя 10а показано на ФИГ. 18, вид сбоку ротора 26а, выполненного на основе постоянных магнитов, первого электродвигателя 10а показан на ФИГ. 19А, вид с торца ротора 26а, выполненного на основе постоянных магнитов, первого электродвигателя 10а показан на ФИГ. 19В, сечение ротора 26а, выполненного на основе постоянных магнитов, первого электродвигателя 10а показано на ФИГ. 20, и магнитное поле 50а статора первого электродвигателя 10а показано на ФИГ. 21. Электродвигатель 10а включает в себя корпус 11, статорную обмотку 14 и ярмо 18 статора. Индуктивный ротор 20а включает в себя стержни 22а, проходящие почти на всю глубину индуктивного ротора 20а, чтобы не допускать утечки магнитного потока и обеспечивать проникновение магнитного поля 32 статора в ротор 26а, выполненный на основе постоянных магнитов. Электродвигатель 10а включает в себя муфту 34а, которая может быть любой муфтой 34', 34'', 34''' или 34''''.
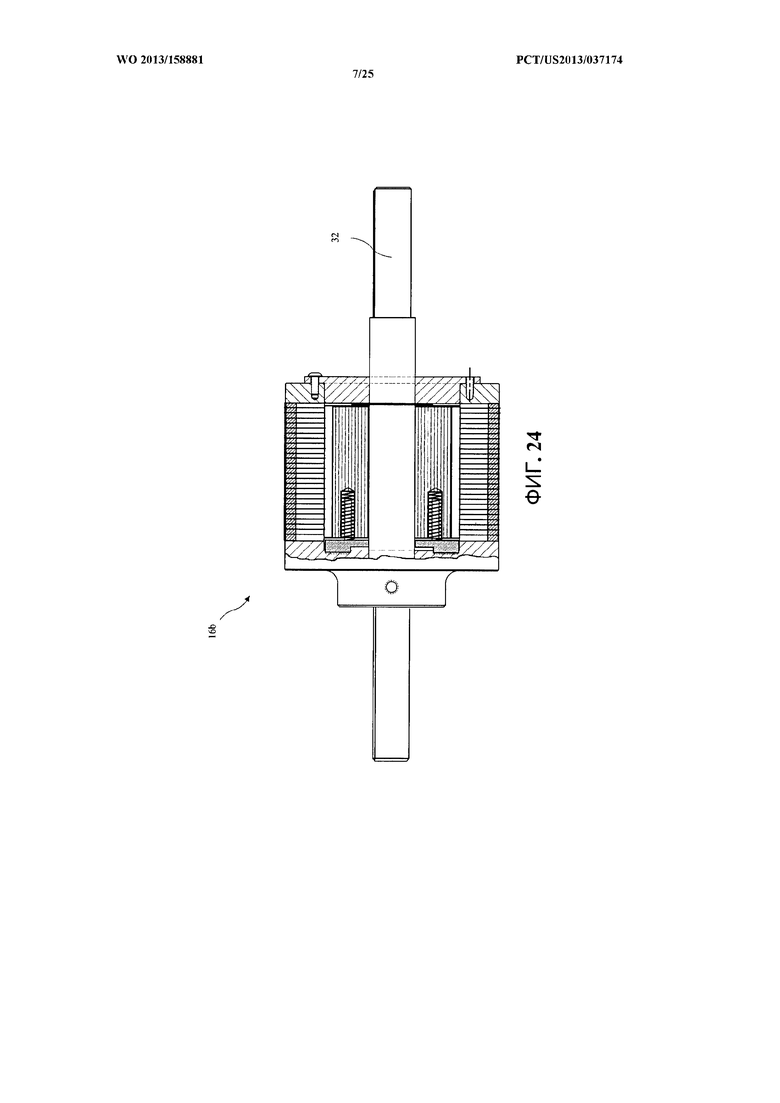
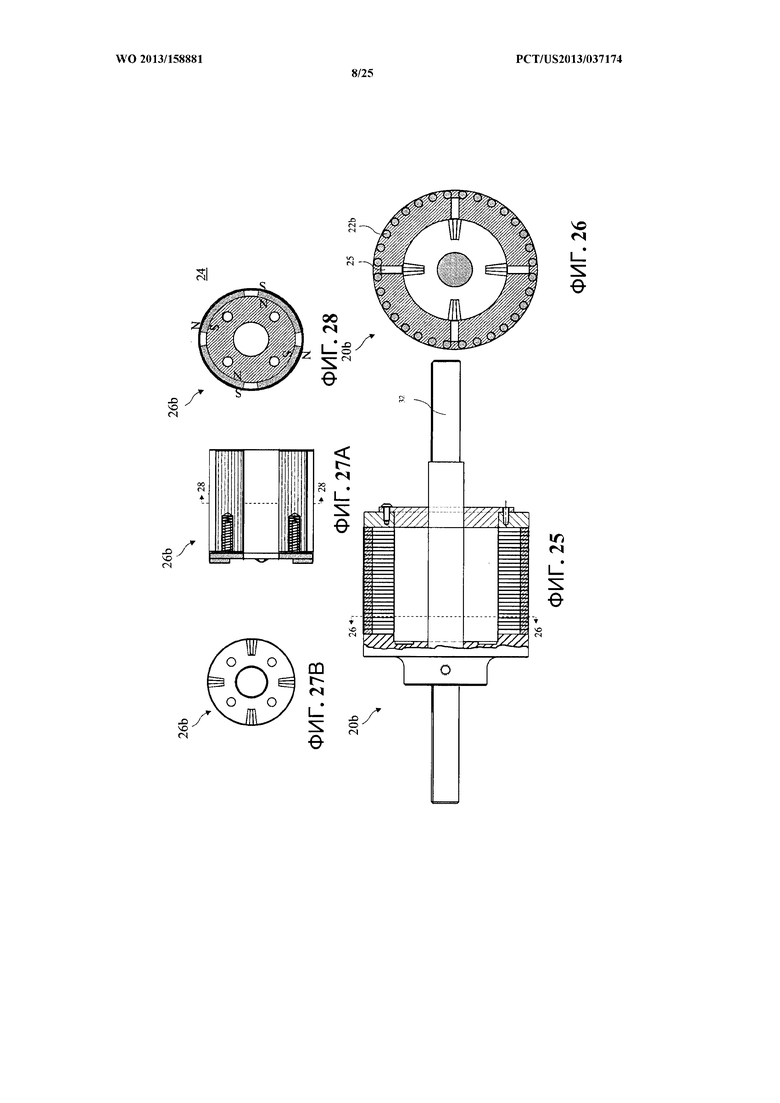
[0099] Вид сбоку второго электродвигателя 10b в соответствии с настоящим изобретением показан на ФИГ. 22, сечение второго электродвигателя 10b показано на ФИГ. 23, более подробный вид сбоку ротора 16b второго электродвигателя 10b показан на ФИГ. 24, вид сбоку индуктивного ротора 20b второго электродвигателя 10b показан на ФИГ. 25, сечение индуктивного ротора 20b второго электродвигателя 10b, полученное по линии 26-26 согласно ФИГ. 25, показано на ФИГ. 26, вид сбоку ротора 26b, выполненного на основе постоянных магнитов, второго электродвигателя 10b показан на ФИГ. 27А, вид с торца ротора 26b, выполненного на основе постоянных магнитов, второго электродвигателя 10b показан на ФИГ. 27В, сечение ротора 26b, выполненного на основе постоянных магнитов, второго электродвигателя 10b, полученное по линии 28-28 согласно ФИГ. 27А, показано на ФИГ. 28, и магнитное поле статора второго электродвигателя 10b показано на ФИГ. 29. Электродвигатель 10b включает в себя корпус 11, статорную обмотку 14 и ярмо 16 статора. Индуктивный ротор 20b включает в себя четыре воздушных зазора 25, образующие четыре полюса и проходящие почти на всю глубину индуктивного ротора 20а, чтобы не допускать утечки магнитного потока и обеспечивать проникновение магнитного поля 32 статора в ротор 26а, выполненный на основе постоянных магнитов. Электродвигатель 10а включает в себя муфту 34а, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является муфтой 34''.
[0100] Вид сбоку третьего электродвигателя 10с в соответствии с настоящим изобретением показан на ФИГ. 30, сечение третьего электродвигателя 10с показано на ФИГ. 31, более подробный вид сбоку ротора 16с третьего электродвигателя 10с показан на ФИГ. 32, вид сбоку индуктивного ротора 20с третьего электродвигателя 10с показан на ФИГ. 33, сечение индуктивного ротора 20с третьего электродвигателя 10с, полученное по линии 34-34 согласно ФИГ. 33, показано на ФИГ. 34, вид сбоку ротора 26с, выполненного на основе постоянных магнитов, третьего электродвигателя 10с показан на ФИГ. 35А, вид с торца ротора 26с, выполненного на основе постоянных магнитов, третьего электродвигателя 10с показан на ФИГ. 35В, и магнитное поле 50с статора третьего электродвигателя 10с показано на ФИГ. 36. Электродвигатель 10с включает в себя муфту 34с, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является муфтой 34''.
[0101] Вид сбоку четвертого электродвигателя 10d в соответствии с настоящим изобретением показан на ФИГ. 37, покомпонентный вид сбоку ротора 16d четвертого электродвигателя 10d показан на ФИГ. 38, вид сбоку индуктивного ротора 20d четвертого электродвигателя 10d показан на ФИГ. 39, сечение индуктивного ротора 20d четвертого электродвигателя 10d, полученное по линии 40-40 согласно ФИГ. 38, показано на ФИГ. 40, вид сбоку ротора 26d, выполненного на основе постоянных магнитов, четвертого электродвигателя 10d показан на ФИГ. 41, и сечение ротора 26d, выполненного на основе постоянных магнитов, четвертого электродвигателя 10d, полученное по линии 42-42 согласно ФИГ. 41, показано на ФИГ. 35В. Электродвигатель 10d включает в себя муфту 34d, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является центробежной муфтой 34'''.
[0102] Вид сбоку четвертого ротора 16d при низких оборотах в минуту с проскальзывающей центробежной муфтой 34''' показан на ФИГ. 4, и сечение четвертого ротора 34''', полученное по линии 44-44 согласно ФИГ. 43, показано на ФИГ. 44. Скорость 66а вращения является низкой, и в весовых элементах 62 возникает лишь небольшая центробежная сила 68а, осуществляя в результате этого лишь небольшое соединение вращения ротора 26d на основе постоянных магнитов с индуктивным ротором 20d.
[0103] Вид сбоку четвертого ротора 16d при высоких оборотах в минуту с фиксирующей центробежной муфтой 34''' показан на ФИГ. 45, и сечение четвертого ротора 34''', полученное по линии 46-46 согласно ФИГ. 45, показано на ФИГ. 46. Скорость 66b вращения является высокой, и в весовых элементах 62 возникает большая центробежная сила 68b, осуществляя в результате этого сильное соединение вращения ротора 26d на основе постоянных магнитов с индуктивным ротором 20d.
[0104] Вид сбоку пятого электродвигателя 10е в соответствии с настоящим изобретением показан на ФИГ. 47, покомпонентный вид сбоку пятого ротора 16е пятого электродвигателя 10е показан на ФИГ. 48, вид сбоку пятого индуктивного ротора 20е пятого электродвигателя 10е показан на ФИГ. 49, сечение пятого индуктивного ротора 20е пятого электродвигателя 10е, полученное по линии 50-50 согласно ФИГ. 49 показано на ФИГ. 50, вид сбоку пятого ротора 26е на основе постоянных магнитов, который включает в себя стержни 22е, пятого электродвигателя 10е, показан на ФИГ. 51, и сечение ротора 26е, выполненного на основе постоянных магнитов, пятого электродвигателя 10е, полученное по линии 52-52 согласно ФИГ. 51, показано на ФИГ. 52. Стержни 22е способствуют первоначальному угловому ускорению ротора 26е на основе постоянных магнитов и достижения им синхронного значения оборотов в минуту. Электродвигатель 10е включает в себя муфту 34е, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является центробежной муфтой 34'''.
[0105] Вид сбоку шестого электродвигателя 10f в соответствии с настоящим изобретением показан на ФИГ. 53, покомпонентный вид сбоку шестого ротора 16f шестого электродвигателя 10f показан на ФИГ. 54, вид сбоку шестого индуктивного ротора 20f шестого электродвигателя 10f показан на ФИГ. 55, сечение шестого индуктивного ротора 20f шестого электродвигателя 10f, полученное по линии 56-56 согласно ФИГ. 55, показано на ФИГ. 56, вид сбоку слоистого сердечника 31 показан на ФИГ. 57, и сечение слоистого сердечника 31 показано на ФИГ. 58, вид сбоку шестого ротора 26f на основе постоянных магнитов шестого электродвигателя 10f показан на ФИГ. 59А, вид с торца ротора 26f, выполненного на основе постоянных магнитов, шестого электродвигателя 10f показан на ФИГ. 59В, перспективный вид индуктивной полоски 23 для обертывания вокруг шестого ротора на основе постоянных магнитов шестого варианта реализации электродвигателя в соответствии с настоящим изобретением показан на ФИГ. 60, и индуктивная полоска 23 в развернутом состоянии показана на ФИГ. 61. Слоистый сердечник 31 прикреплен к валу 32 электродвигателя, а постоянные магниты 26f вращаются вокруг слоистого сердечника 31. Индуктивная полоска 23 включает в себя расположенные на расстоянии друг от друга проводящие полоски 23 а, все из которых электрически соединены с проводящими кольцами 23b на каждом конце индуктивной полоски 23. Вариант реализации индуктивной полоски 23 представляет собой медную полоску, приклеенную к кольцевому магниту. Толщина медной полоски составляет предпочтительно от 0,015 до 0,020 дюймов (от 0,38 до 0,51 мм) с поддержанием минимального воздушного зазора, но с созданием достаточного вихревого тока, который приводит к быстрому втягиванию ротора, выполненного на основе постоянных магнитов, с обеспечением синхронности оборотов в минуту, оставляя внешний индуктивный ротор для ускорения под нагрузкой с обеспечением подтягивания муфтой индуктивного ротора к конечному синхронному значению оборотов в минуту. Ротор 26f на основе постоянных магнитов представляет собой простой кольцевой магнит, имеющий реализуемое с возможностью изменения соединение с индуктивным ротором, как описано выше. Электродвигатель 1 Of включает в себя муфту 34е, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является центробежной муфтой 34'''.
[0106] Вид сбоку седьмого варианта реализации электродвигателя 10g в соответствии с настоящим изобретением показан на ФИГ. 62. Электродвигатель 10g включает в себя статор 12g, ротор 26g на основе постоянных магнитов, индуктивный ротор 20g, замыкающие кольца 17g ротора типа "беличья клетка" и муфту 34g. Ротор 26g на основе постоянных магнитов представляет собой кольцевой магнит, имеющий медную внутреннюю обертку.
[0107] Вид сбоку восьмого варианта реализации электродвигателя 10h в соответствии с настоящим изобретением показан на ФИГ. 63. Электродвигатель 10h включает в себя статор 12h, ротор 26h на основе постоянных магнитов, индуктивный ротор 20h, замыкающие кольца 17h ротора типа "беличья клетка" и муфту 34h. Ротор 26h на основе постоянных магнитов представляет собой кольцевой магнит, имеющий медную внутреннюю обертку. Электродвигатель 10h имеет внутренний статор 12h, а индуктивный ротор 20h и ротор 26h на основе постоянных магнитов размещены с внешней стороны статора 12h. Муфта 34h размещена внутри замыкающих колец 17h ротора типа "беличья клетка".
[0108] Вид сбоку девятого варианта реализации электродвигателя 10i в соответствии с настоящим изобретением показан на ФИГ. 64. Электродвигатель 10i включает в себя статор 12i, ротор 26i на основе постоянных магнитов, индуктивный ротор 20i, замыкающие кольца 17i ротора типа "беличья клетка" и муфту 34i. Ротор 26i на основе постоянных магнитов представляет собой кольцевой магнит, имеющий медную внутреннюю обертку. Электродвигатель 10h имеет внутренний статор 12i, а индуктивный ротор 20i и ротор 26i, выполненный на основе постоянных магнитов размещены с внешней стороны статора 12i. Муфта 34i размещена с внешней стороны замыкающих колец 17i ротора типа "беличья клетка".
[0109] Вид сбоку десятого варианта реализации электродвигателя 10j в соответствии с настоящим изобретением показан на ФИГ. 65, сечение выполненного с возможностью независимого вращения ротора 26j, выполненного на основе постоянных магнитов, электродвигателя 10j, полученное по линии 66-66 согласно ФИГ. 65, показано на ФИГ. 66, и сечение индуктивного ротора 20j электродвигателя 10j, полученное по линии 67-67 согласно ФИГ. 65, показано на ФИГ. 67. Электродвигатель 10j включает в себя статор 12j, индуктивный ротор 20j прикрепленный с возможностью вращения к валу 29 электродвигателя, выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов соосно с валом 29 электродвигателя через втулку или подшипник 82, и муфту 34j, соединяющую выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов с валом 29 электродвигателя.
Индуктивный ротор 20j и выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов смещены в осевом направлении, а не радиально как в электродвигателях 10a-10i.
[0110] Выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов включает в себя постоянные магниты (например, кольцевые магниты) 84 для работы в синхронном режиме, и включает в себя стержни 22j. Стержни 22j способствуют пуску ротора 26j, выполненного на основе постоянных магнитов, в направлении вращающегося магнитного потока статора независимо от постоянных магнитов 84 с соединением выполненного с возможностью независимого вращения ротора 26j на основе постоянных магнитов с вращающимся магнитным потоком статора. Кроме того, в двухполюсном электродвигателе на 60 Гц частота вращающегося магнитного потока статора составляет 3600 оборотов в минуту, даже если выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов имеет очень низкую инерционную массу и может осуществить пуск самостоятельно, может произойти проскакивание. Стержни 22j ротора в выполненном с возможностью независимого вращения роторе 26j на основе постоянных магнитов способствуют ускорению выполненного с возможностью независимого вращения ротора 26j на основе постоянных магнитов в случае такого проскакивания, ускоряя выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов до тех пор, пока магнитный поток постоянных магнитов 84 не соединится с вращающимся магнитным потоком статора, приводя выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов к синхронной скорости.
[0111] В альтернативном варианте реализации изобретения выполненный с возможностью независимого вращения ротор 26j на основе постоянных магнитов может содержать индуктивную полоску 23, описанную выше, обернутую вокруг выполненного с возможностью независимого вращения ротора 26j на основе постоянных магнитов, заменяя стержни 22j. Перспективный вид индуктивной полоски 23 показан на ФИГ. 60, и индуктивная полоска 23 в развернутом состоянии показана на ФИГ. 61. Индуктивная полоска 23 может быть выполнена в виде медной ленты или ленты из цветного металла и обеспечивать те же самые преимущества при пуске, что и стержни 22j ротора. Стержни 22j ротора и индуктивная полоска 23 наводят индуктивное магнитное поле, при этом индуктивная полоска 23 создает вихревой ток и стержни ротора создают магнитный поток, так что оба из них взаимодействуют с магнитными потоками неподвижного статора.
[0112] Электродвигатель 10j включает в себя муфту 34j, которая может быть любой муфтой 34', 34'', 34''' или 34'''', но предпочтительно является центробежной муфтой 34'''. Центробежная муфта 34''' работает так, как описано на ФИГ. 44 и 46.
[0113] Одиннадцатый вариант реализации электродвигателя 10k в соответствии с настоящим изобретением показан на ФИГ. 68. Индукционный ротор, ротор на основе постоянных магнитов и статор выполнены в электродвигателе 10j, а центробежная муфта электродвигателя 10j заменена муфтой 34' скольжения.
Промышленная применимость
[0114] Настоящее изобретение находит промышленное применение в области электрических двигателей.
Объем изобретения
[0115] Хотя изобретение, раскрытое в данном документе, было описано с помощью конкретных вариантов его осуществления и применения, специалистами в данной области техники для изобретения могут быть выполнены многочисленные модификации и варианты без отступления от объема изобретения, выраженного формулой изобретения.
Изобретение относится к области электротехники, в частности к гибридному двигателю, работающему при пуске в режиме асинхронного индукционного двигателя, а затем переходящему в синхронный режим. Технический результат – повышение эффективности. Гибридный асинхронный электродвигатель включает в себя индуктивный ротор и выполненный с возможностью независимого вращения ротор на основе постоянных магнитов. Индуктивный ротор представляет собой ротор типа "беличья клетка" для работы в режиме асинхронного электродвигателя при пуске. Ротор на основе постоянных магнитов смещен радиально или в осевом направлении и имеет реализуемое с возможностью изменения соединение с индуктивным ротором через муфту. По мере приближения количества оборотов в минуту индуктивного ротора к синхронному значению или достижения количества оборотов в минуту индуктивного ротора синхронного значения соединение между индуктивным ротором и ротором, выполненным на основе постоянных магнитов, увеличивается до тех пор, пока два ротора не будут соединены при синхронном значении количества оборотов в минуту, а электродвигатель не перейдет в режим работы синхронного двигателя. 3 н. и 24 з.п. ф-лы, 68 ил.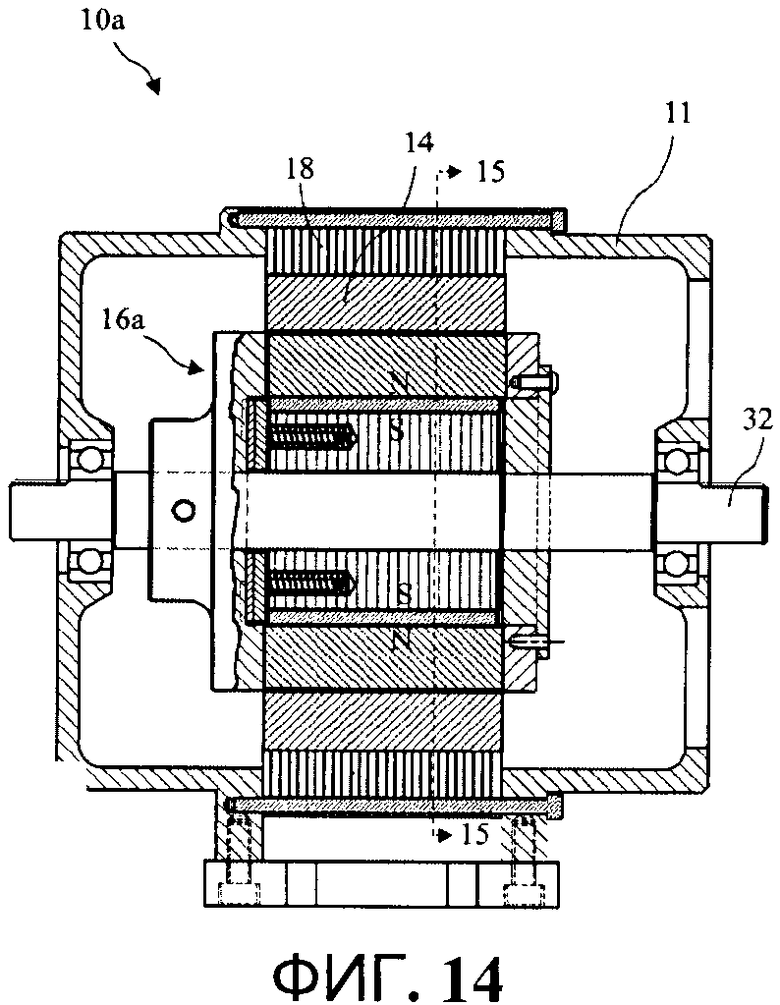
1. Гибридный асинхронный электродвигатель на основе постоянных магнитов, запускаемый как асинхронный электродвигатель и переходящий в режим синхронной работы, содержащий:
вал электродвигателя;
неподвижный статор, создающий вращающееся магнитное поле статора;
индуктивный ротор, соосно прикрепленный к валу электродвигателя и включающий в себя беличью клетку для наведения тока; и
ротор, выполненный на основе постоянных магнитов соосно с валом электродвигателя и имеющий реализуемое с возможностью изменения вращательное соединение с валом электродвигателя с обеспечением вращения ротора, выполненного на основе постоянных магнитов, независимо от вала электродвигателя;
причем магнитное поле статора взаимодействует с беличьей клеткой для наведения тока в индуктивном роторе, когда вращение индуктивного ротора не синхронизировано с вращением магнитного поля статора, и
магнитное поле статора взаимодействует с ротором, выполненным на основе постоянных магнитов, для ускорения вращения ротора, выполненного на основе постоянных магнитов, чтобы синхронизировать его с вращением магнитного поля статора.
2. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 1, в котором соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя представляет собой фиксированное соединение при приближении количества оборотов в минуту вала электродвигателя и ротора, выполненного на основе постоянных магнитов, к синхронному значению.
3. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 2, в котором соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя становится фиксированным соединением, когда вал электродвигателя и ротор, выполненный на основе постоянных магнитов, достигают синхронного значения количества оборотов в минуту.
4. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 2, в котором ротор, выполненный на основе постоянных магнитов, и индуктивный ротор соединены электрически управляемой муфтой.
5. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 4, в котором соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя реализовано электромагнитной муфтой, уменьшающей соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя, когда проскальзывание между индуктивными стержнями в индуктивном роторе и магнитным полем статора при пуске является большим.
6. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 2, в котором соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя реализовано центробежной муфтой.
7. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 6, в котором центробежная муфта фиксированно соединяет ротор, выполненный на основе постоянных магнитов, и вал электродвигателя при достижении скорости индуктивного ротора синхронного значения.
8. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 7, в котором массовые элементы в центробежной муфте выполнены с возможностью вращения с индуктивным ротором.
9. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 8, в котором центробежная муфта содержит:
наружную часть в виде стакана, прикрепленную с возможностью вращения к ротору, выполненному на основе постоянных магнитов; и
внутреннюю часть в виде массовых элементов, включающую в себя множество массовых элементов, прикрепленных с возможностью вращения к индуктивному ротору и выполненных с возможностью свободного контакта в радиальном направлении с наружной частью в виде стакана и развития силы с упиранием в наружный стакан, чтобы фиксировать вращение индуктивного ротора с ротором, выполненным на основе постоянных магнитов, по мере приближения скорости вращения индуктивного ротора к синхронному значению.
10. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 2, в котором соединение между ротором, выполненным на основе постоянных магнитов, и валом электродвигателя представляет собой муфту скольжения, обеспечивающую быстрое ускорение ротора, выполненного на основе постоянных магнитов, при пуске.
11. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 10, в котором муфта скольжения представляет собой обеспечивающую дискретные положения муфту скольжения, обеспечивающую при вращении дискретные угловые положения выравнивания между ротором, выполненным на основе постоянных магнитов, и индуктивным ротором.
12. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 10, в котором муфта скольжения представляет собой обеспечивающую непрерывные положения муфту скольжения, обеспечивающую при вращении непрерывный диапазон угловых положений выравнивания между ротором, выполненным на основе постоянных магнитов, и индуктивным ротором.
13. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 1, в котором ротор, выполненный на основе постоянных магнитов, содержит индуктивные стержни, взаимодействующие с вращающимся магнитным полем статора при пуске для ускорения ротора, выполненного на основе постоянных магнитов.
14. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 1, в котором ротор, выполненный на основе постоянных магнитов, содержит индуктивную полоску, взаимодействующую с вращающимся магнитным полем статора при пуске для ускорения ротора, выполненного на основе постоянных магнитов.
15. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 14, в котором индуктивная полоска обернута вокруг ротора, выполненного на основе постоянных магнитов.
16. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 15, в котором индуктивная полоска включает в себя расположенные на расстоянии друг от друга проводящие полоски, все из которых электрически соединены с проводящими кольцами на каждом конце индуктивной полоски.
17. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 15, в котором постоянный магнит представляет собой кольцевой постоянный магнит, а индуктивная полоска включает в себя расположенные на расстоянии друг от друга проводящие полоски, электрически соединенные с проводящими кольцами на каждом конце индуктивной полоски, и обернута вокруг кольцевого магнита с обеспечением индуктивной выработки крутящего момента для первоначального ускорения кольцевого ротора, выполненного на основе постоянных магнитов.
18. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 17, в котором индуктивная полоска представляет собой медную полоску толщиной от 0,015 до 0,020 дюймов (от 0,38 до 0,51 мм).
19. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 1, в котором индуктивный ротор и ротор, выполненный на основе постоянных магнитов, размещены внутри статора.
20. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 19, в котором ротор, выполненный на основе постоянных магнитов, размещен внутри индуктивного ротора.
21. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 19, в котором ротор, выполненный на основе постоянных магнитов, размещен с внешней стороны индуктивного ротора.
22. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 19, в котором ротор, выполненный на основе постоянных магнитов, размещен со смещением в осевом направлении относительно индуктивного ротора.
23. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 1, в котором индуктивный ротор и ротор, выполненный на основе постоянных магнитов, размещены с внешней стороны статора.
24. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 23, в котором ротор, выполненный на основе постоянных магнитов, размещен внутри индуктивного ротора.
25. Гибридный асинхронный электродвигатель на основе постоянных магнитов, запускаемый как асинхронный электродвигатель и переходящий в режим синхронной работы, содержащий:
вал электродвигателя;
неподвижный статор, создающий вращающееся магнитное поле статора;
индуктивный ротор, соосно прикрепленный к валу электродвигателя и включающий в себя беличью клетку для наведения тока; и
ротор, выполненный на основе постоянных магнитов соосно с валом электродвигателя и имеющий реализуемое с возможностью изменения вращательное соединение с валом электродвигателя с обеспечением вращения ротора, выполненного на основе постоянных магнитов, независимо от вала электродвигателя, когда индуктивный ротор вращается при низких значениях оборотов в минуту, и усилением соединения ротора, выполненного на основе постоянных магнитов, с валом электродвигателя по мере приближения количества оборотов в минуту индуктивного ротора к синхронному значению,
причем магнитное поле статора взаимодействует с беличьей клеткой для наведения тока в индуктивном роторе, когда вращение индуктивного ротора не синхронизировано с вращением магнитного поля статора, и
магнитное поле статора взаимодействует с ротором, выполненным на основе постоянных магнитов, для ускорения вращения ротора, выполненного на основе постоянных магнитов, чтобы синхронизировать его с вращением магнитного поля статора.
26. Гибридный асинхронный электродвигатель на основе постоянных магнитов по п. 25, в котором индуктивный ротор включает в себя четыре воздушных зазора 25, образующих четыре полюса и проходящих, по существу, на всю глубину индуктивного ротора.
27. Гибридный асинхронный электродвигатель на основе постоянных магнитов, запускаемый как асинхронный электродвигатель и переходящий в режим синхронной работы, содержащий:
вал электродвигателя;
неподвижный статор, создающий вращающееся магнитное поле статора;
индуктивный ротор, прикрепленный к валу электродвигателя и включающий в себя беличью клетку для наведения тока; и
ротор, выполненный на основе постоянных магнитов, соосный с и имеющий реализуемое с возможностью изменения вращательное соединение с индуктивным ротором через центробежную муфту с обеспечением вращения ротора, выполненного на основе постоянных магнитов, независимо от индуктивного ротора, когда индуктивный ротор вращается при низких значениях оборотов в минуту, и усилением соединения ротора, выполненного на основе постоянных магнитов, с индуктивным ротором по мере приближения количества оборотов в минуту индуктивного ротора к синхронному значению,
причем магнитное поле статора взаимодействует с беличьей клеткой для наведения тока в индуктивном роторе, когда вращение индуктивного ротора не синхронизировано с вращением магнитного поля статора, и
магнитное поле статора взаимодействует с ротором, выполненным на основе постоянных магнитов, для ускорения вращения ротора, выполненного на основе постоянных магнитов, чтобы его синхронизировать с вращением магнитного поля статора.
| US 2006175924 A1, 10.08.2006 | |||
| US 7531934 B2, 12.05.2009 | |||
| DE 3922794 A1, 25.01.1990 | |||
| JP 2009213342 A, 17.09.2009 | |||
| Синхронный электродвигатель с постоянными магнитами | 1987 |
|
SU1631672A1 |

