Предлагаемое устройство может быть использовано в области ветроэнергетики, конкретно - при управлении ветроэнергетической установкой.
Известно устройство управления ветроэнергетической установкой - аналог [К. Mortensen, С. Skamris. The masnedoe wind farm. Demonstration project. ELKRAFT Power Company Ltd, Copenhagen, August, 1989.] мощностью 300 кВт. Ветроколесо выполнено трехлопастным. При этом система регулирования угла установки лопастей размещена в ступице ветроколеса и содержит гидроцилиндр установки общего угла лопастей, а также три защитных гидроцилиндра (по одному для каждой лопасти). Недостатком устройства-аналога является то, что подвод масла к гидроцилиндрам производится через сквозные отверстия, просверленные по всей длине основного вала ветроустановки, что усложняет устройство и снижает надежность всей ветроэнергетической установки.
Известно устройство управления ветроэнергетической установкой - прототип [Патент РФ №2444646, МПК F03D 7/02, приоритет от 17.06.2010 г.], содержащее лопасти ветроколеса, ступицу и вал ветроколеса, мультипликатор, электрогенератор, энергосистему, рычаг и тягу по числу лопастей, блок управления лопастями, датчик скорости ветра, задатчик общего угла установки лопастей и датчик угла установки лопасти ветроколеса, при этом лопасти ветроколеса выполнены каждая с возможностью вращения вокруг своей продольной оси в ступице вала ветроколеса, вал ветроколеса соединен с валом электрогенератора, статорная обмотка которого подсоединена к энергосистеме, каждая лопасть ветроколеса ортогонально ее продольной оси вращения жестко соединена с рычагом, который шарнирно соединен с тягой, на валу ветроколеса жестко расположен блок управления лопастями, кроме того, оно снабжено датчиком углового положения вала ветроколеса, блоком контактных колец и блоками управления углом установки лопасти по числу лопастей ветроколеса, при этом датчик углового положения вала ветроколеса жестко расположен на валу ветроколеса, блок управления лопастями содержит по числу лопастей ветроколеса блоки управления углом установки лопасти, выход каждого из которых соединен с тягой своей лопасти, первый, второй и третий входы блока управления углом установки лопасти соединены соответственно с выходами датчика скорости ветра, задатчика угла установки лопасти и датчика углового положения вала, а четвертый вход указанного блока соединен с выходом блока контактных колец, вход которого соединен с энергосистемой.
Кроме того, блок управления углом установки лопасти снабжен блоком формирования сигнала о высоте расположения лопасти ветроколеса, блоком формирования сигнала о скорости ветра на высоте расположения лопасти ветроколеса, блоком формирования сигнала о скорости ветра на минимальной высоте расположения лопасти ветроколеса, сумматором, функциональным блоком формирования сигнала о приращении угла установки лопасти ветроколеса, блоком формирования сигнала задания угла установки лопасти ветроколеса, регулятором угла установки лопасти ветроколеса, полупроводниковым преобразователем частоты, электродвигателем, системой передачи "винт-гайка", при этом первый, второй и третий входы блока управления углом установки лопасти соединены соответственно с первым входом блока формирования сигнала о скорости ветра на высоте расположения лопасти ветроколеса и входом блока формирования сигнала о скорости ветра на минимальной высоте расположения лопасти ветроколеса, выходы которых подсоединены соответственно к первому и второму входам сумматора, с первым входом блока формирования сигнала задания угла установки лопасти ветроколеса и с входом блока формирования сигнала о высоте расположения лопасти ветроколеса, выход которого соединен со вторым входом блока формирования сигнала о скорости ветра на высоте расположения лопасти ветроколеса, выход сумматора через функциональный блок формирования сигнала о приращении угла установки лопасти ветроколеса соединен со вторым входом блока формирования сигнала задания угла установки лопасти ветроколеса, выход которого соединен со вторым входом регулятора угла установки лопасти ветроколеса, первый вход которого соединен с выходом датчика угла установки лопасти ветроколеса, а выход регулятора соединен со входом управления полупроводникового преобразователя частоты, силовой вход которого соединен с четвертым входом блока управления углом установки лопасти, а силовой выход соединен с электродвигателем, вал последнего соединен через муфту с системой передачи "винт-гайка", гайка которого шарнирно соединена с тягой и с подвижным элементом датчика угла установки лопасти ветроколеса.
Недостатком устройства-прототипа является то, что на валу ветроколеса жестко расположен блок управления лопастями с блоками управления углом установки лопастей по числу лопастей ветроколеса, что усложняет устройство и снижает надежность всей ветроэнергетической установки.
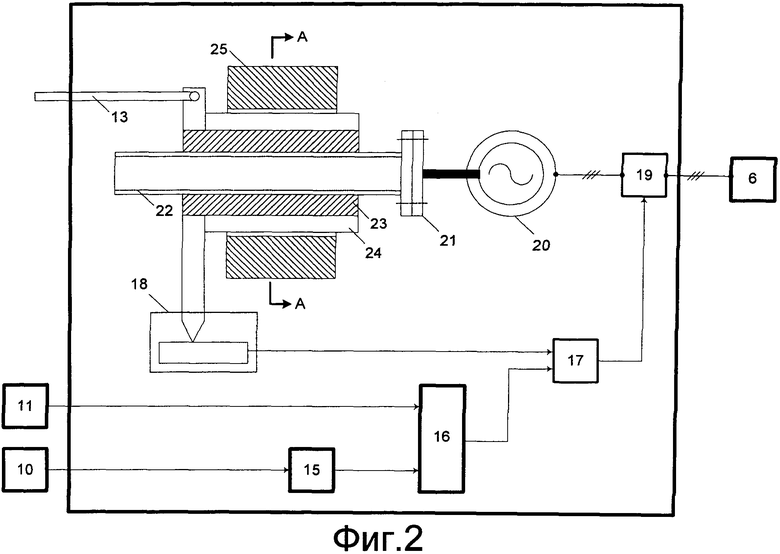
Техническая задача, решаемая предлагаемым изобретением, состоит в упрощении ветроэнергетической установки и в повышении ее надежности. Технический эффект заключается в том, что блок управления лопастями и блоки управления углом установки лопасти выполнены неподвижными, что упрощает устройство в целом и повышает его надежность. Указанный технический эффект достигается тем, что известное устройство управления ветроэнергетической установкой, содержащее лопасти ветроколеса, ступицу и вал ветроколеса, мультипликатор, электрогенератор, энергосистему, рычаги и первые тяги по числу лопастей, блок управления лопастями, датчик скорости ветра, задатчик общего угла установки лопастей, блоки управления углом установки лопасти, выход каждого из которых соединен со своей второй тягой, первый и второй входы блоков управления углом установки лопасти соединены соответственно с выходами датчика скорости ветра и задатчика угла установки лопасти, при этом лопасти ветроколеса выполнены каждая с возможностью вращения вокруг своей продольной оси в ступице ветроколеса, вал ветроколеса соединен с валом электрогенератора, статорная обмотка которого подсоединена к энергосистеме, каждая лопасть ветроколеса ортогонально ее продольной оси вращения жестко соединена с рычагом, который шарнирно соединен с первой тягой, согласно изобретению, дополнительно снабжено автоматом перекоса вертолета, установленным на валу ветроколеса, вторыми тягами, блок управления лопастями содержит не менее трех блоков управления углом установки лопасти, третий вход блоков управления углом установки лопасти соединен с энергосистемой, при этом входы автомата перекоса вертолета соединены со вторыми тягами, выходы соединены с первыми тягами. Предлагаемое устройство схематично представлено на рисунках. На Фиг.1 представлена общая схема устройства управления ветроэнергетической установкой. На Фиг.2 представлен блок управления углом установки лопасти. На Фиг.3 представлен поперечный разрез системы передачи "винт-гайка". На Фиг.4 представлен автомат перекоса вертолета. На Фиг.5 представлен график изменения скорости ветра по всей высоте ветроэнергетической установки. На Фиг.6 представлены графики изменения мощностей трехлопастного ветроколеса за один его оборот.
Согласно Фиг.1, устройство управления ветроэнергетической установкой содержит лопасти 1 ветроколеса, ступицу 2 и вал 3 ветроколеса, мультипликатор 4, электрогенератор 5, энергосистему 6, рычаги 7 и первые тяги 8 по числу лопастей, блок 9 управления лопастями, датчик 10 скорости ветра, задатчик 11 общего угла установки лопастей, блоки 12 управления углом установки лопасти, выход каждого из которых соединен со своей второй тягой 13, автомат 14 перекоса вертолета, первый и второй входы блоков 12 управления углом установки лопасти соединены соответственно с выходами датчика 10 скорости ветра и задатчика 11 угла установки лопасти, при этом лопасти 1 ветроколеса выполнены каждая с возможностью вращения вокруг своей продольной оси в ступице 2 ветроколеса, вал 3 ветроколеса соединен (например, через мультипликатор 4) с валом электрогенератора 5, статорная обмотка которого подсоединена к энергосистеме 6, каждая лопасть 1 ветроколеса ортогонально ее продольной оси вращения жестко соединена с рычагом 7, который шарнирно соединен с первой тягой 8, блок 9 управления лопастями содержит не менее трех блоков 12 управления углом установки лопасти, третий вход блоков 12 управления углом установки лопасти соединен с энергосистемой 6, при этом входы автомата 14 перекоса вертолета соединены со вторыми тягами 13, выходы соединены с первыми тягами 8, а вал 3 ветроколеса является и валом автомата 14 перекоса вертолета.
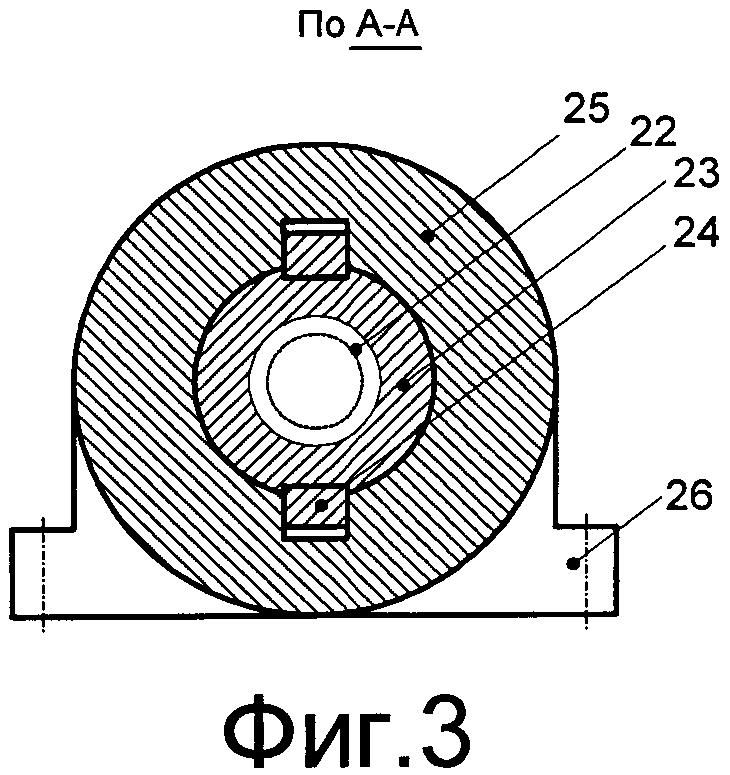
На Фиг.1 условно приведена схема ветроэнергетической установки при двухлопастном выполнении ветроколеса. При однолопастном или многолопастном (например, трехлопастном) выполнении ветроколеса соответственно меняется лишь число элементов 1, 7, 8 (см. Фиг.4). Согласно Фиг.2, первый вход блока 12 управления углом установки лопасти соединен с выходом датчика 10 скорости ветра, обычно выполненный как анемометр, расположенный на гондоле ветроэнергетической установки. Второй вход блока 12 управления углом установки лопасти соединен с выходом задатчика 11 угла установки лопасти. Задатчик 11 угла установки лопасти в простейшем случае представляет собой источник постоянного сигнала. Третий (силовой) вход блока 12 управления углом установки лопасти соединен с энергосистемой 6. При этом первый вход блока 12 управления углом установки лопасти соединен со входом функционального блока 15 формирования сигнала приращения угла установки лопасти ветроколеса, выход которого соединен со вторым входом блока 16 формирования сигнала задания угла установки лопасти ветроколеса. Первый вход блока 16 соединен со вторым входом блока 12. Выход блока 16 соединен со вторым входом регулятора 17 угла установки лопасти ветроколеса, первый вход которого соединен с выходом датчика 18 угла установки лопасти ветроколеса. В простейшем случае датчик 18 выполнен в виде регулируемого резистора с ползунком, перемещение которого пропорционально изменению угла установки лопасти. Выход регулятора 17 соединен со вторым входом (входом управления) полупроводникового преобразователя частоты 19, первый вход (силовой вход) которого соединен с третьим входом блока 12. Полупроводниковый преобразователь частоты 19 выполнен в виде известных или непосредственного преобразователя частоты, или выпрямительно-инверторного устройства (Жемеров Г.Г. Тиристорные преобразователи частоты с непосредственной связью. М.: "Энергия", 1977). Силовой выход преобразователя частоты 19 соединен с электродвигателем 20. Вал электродвигателя 20 соединен через муфту 21 с винтом 22, который проходит внутри гайки 23. Гайка 23 снаружи снабжена шлицами 24, расположенными во внутренних пазах корпуса 25. Корпус 25 имеет ушки 26 (см. Фиг.3) для жесткого соединения внутри неподвижного блока 12 управления углом установки лопасти. Винт 22, гайка 23 и корпус 25 образуют известную систему передачи "винт-гайка", предназначенную для преобразования вращательного движения в поступательное движение. На Фиг.2 приведен продольный разрез передачи, а на Фиг.3 приведен ее поперечный разрез (1. Машиностроение. Энциклопедия. / Ред. совет: К.В. Фролов (пред.) и др. М.: Машиностроение. 2. Детали машин. Конструкционная прочность. Трение, износ, смазка. Т. IV-1/ Д.Н. Решетов, А.П. Гусенков и др.; Под общ. ред. Д.Н. Решетова. - 864 с.: ил.). Гайка 23 шарнирно соединена со второй тягой 13. Гайка 23 также соединена с подвижным элементом (ползунком) датчика 18 угла установки лопасти ветроколеса.
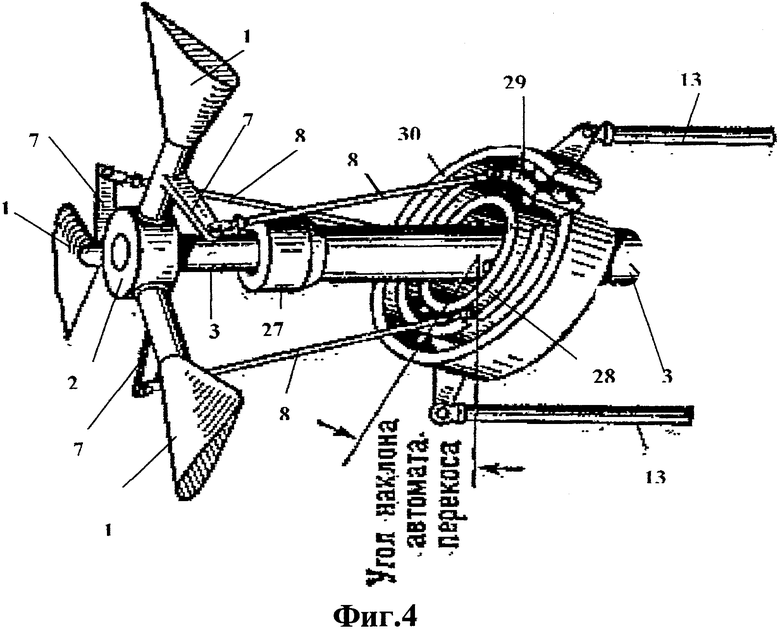
На Фиг.4 представлен автомат 14 перекоса вертолета. Согласно Фиг.4, на валу 3 расположен цилиндр 27 с возможностью перемещения вдоль вала 3. Над цилиндром 27 соосно расположены кольца 28, 29 и 30. Цилиндр 27 и кольца 28, 29 образуют карданную передачу, поэтому вал 3, цилиндр 27 и кольца 28, 29 вращаются с одной и той же угловой скоростью. Карданная передача (или другие названия: карданный механизм, кардан, карданный шарнир, шарнирная муфта) - это устройство для передачи вращения от ведущего вала (звена) к ведомому звену (валу), оси вращения которых расположены под углом друг к другу [Малаховский Я.Э., Лапин А.А., Веденеев Н.К. Карданные передачи, М., 1962]. Вращающееся кольцо 29 и не вращающееся кольцо 30 образуют подшипник. Наружное кольцо 30 подшипника соединено с тремя вторыми тягами 13, сдвинутыми в пространстве на 120 градусов. В свою очередь, внутреннее кольцо 29 подшипника через равномерно распределенные по кругу первые тяги 8 по числу лопастей 1 ветроколеса шарнирно соединено с рычагами 7 лопастей 1. Вторые тяги 13 соединены со своими блоками 12 управления углом φ установки лопасти 1 ветроколеса. Элементы 27-30 образуют автомат перекоса вертолета, изобретенный Б.Н. Юрьевым в 1911 г. [Изаксон А.М. Советское вертолетостроение, М., 1964].
Устройство работает следующим образом. Каждая лопасть 1 ветроколеса в течение каждого оборота последовательно проходит крайнее нижнее, горизонтальное и крайнее верхнее положения.
Скорость ветра Uhi на высоте hi текущего расположения лопастей ветроколеса определяется по формуле

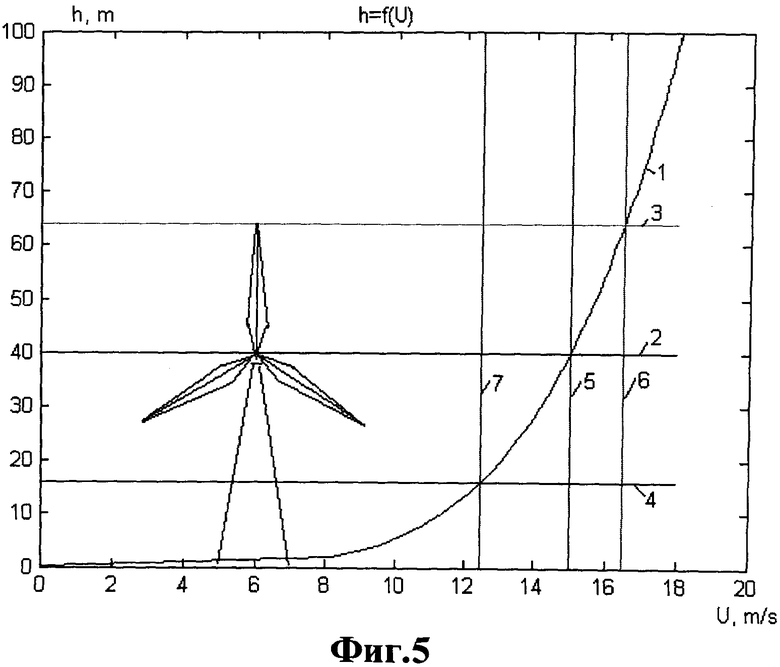
где h0 - высота оси вращения ветроколеса; U0 - скорости ветра на высоте h0; b - показатель степени, обычно в среднем за год для открытой местности принято значение b=0,2 (Бурмистров А.А., Виссарионов В.И., Дерюгина Г.В. и др. Методы расчета ресурсов возобновляемых источников энергии.; под ред. В.И. Виссарионова. - М.: Издательский дом МЭИ, 2007.). Согласно этой формуле, на Фиг.5 представлен график (кривая 1) изменения скорости ветра при U0=15 м/с по всей высоте для ветроэнергетической установки Российского производства типа "Радуга 1" мощностью 1 МВт с радиусом трехлопастного ветроколеса RBK=24 м, установленной в Калмыкии недалеко от г.Элисты (Селезнев И.С. Состояние и перспективы работ МКБ "Радуга" в области ветроэнергетики. Конверсия в машиностроении - Conversion in machine building of Russia, 1995, №5). Кроме того, на Фиг.5 горизонтальные линии 2, 3, 4 соответствуют высотам h0=40 м, hmax=h0+RBK=40+24=64 м, hmin=h0-RBK=40-24=16 м; вертикальные линии 5, 6, 7 соответствуют скоростям ветра U0=15 м/с, Umax=16,4784 м/с, Umin=12,4883 м/с на этих высотах.
По сигналу от датчика 10 скорости ветра U0 на высоте оси вращения ветроколеса функциональный блок 15 формирует текущее значение сигнала о приращении угла установки лопасти Δφi ветроколеса согласно выражению

Функция fi может быть любой (это зависит от открытости ветрам местности), например - это постоянный коэффициент пропорциональности ki. Рассмотрим простой случай. Как отмечалось, три вторые тяги 13 соединены шарнирно с внешним кольцом 30 автомата 14 перекоса вертолета со сдвигом 120 градусов. Примем, что первое из этих соединений (с индексом "1") расположено строго в верхнем вертикальном положении. Примем также, что для этого соединения k1=0, т.е. в верхнем положении лопасти приращение угла установки лопасти Δφ1=0. Два других соединения (с индексами "2" и "3") расположены внизу строго симметрично относительно первого соединения (т.е. сдвинуты в пространстве относительно первого соединения соответственно на +120 и -120 градусов). При этом k2=k3 принимают согласно функции fi такие значения, что обеспечивают выполнение равенства, например, Δφ2=Δφ3=5°. Это значит, что в течение одного оборота в нижнем положении лопасти ее угол установки увеличится на 5°.
Сигнал с выхода задатчика 11 общего угла φ0 установки лопастей и сигнал с выхода блока 15 поступают соответственно на первый и второй входы блока 16, формирующего сигнал задания угла установки лопасти φзадi в виде

Сигнал с выхода датчика 18 угла φдi установки лопасти ветроколеса и сигнал φзадi с выхода блока 16 поступают соответственно на первый и второй входы регулятора 17, реализующего, например, пропорционально - интегрально - дифференциальное (ПИД) регулирование угла φi установки лопасти ветроколеса:

где p - символ дифференцирования, kпр, kинт, kдиф - коэффициенты соответственно пропорционального, интегрального и дифференциального регулирования.
Сигнал с выхода регулятора 17 поступает на вход управления полупроводникового преобразователя частоты 19, преобразующего напряжение своего силового входа в напряжение требуемой амплитуды и частоты на своем силовом выходе для питания электродвигателя 20. При этом вал электродвигателя 20 через муфту 21 вращает винт 22, который проходит внутри гайки 23. Так как гайка 23 снаружи снабжена шлицами 24, расположенными во внутренних пазах корпуса 25, то при вращении винта 22 гайка 23 перемещается вдоль корпуса 25, жестко соединенного с неподвижным блоком 12 управления углом установки лопасти. При перемещении гайки 23 одновременно перемещаются связанные с ней тяга 13 лопасти и ползунок датчика 18 угла установки лопасти ветроколеса. Величина и направление этого перемещения определяются продолжительностью и направлением вращения электродвигателя. Так как при перемещении ползунка меняется и сигнал с выхода датчика 18 угла φдi установки лопасти ветроколеса, то регулятор 17 будет реализовывать указанное ПИД регулирование. При этом величины коэффициентов регулирования устанавливаются такими, чтобы всегда выполнялось условие

Это обеспечивает требуемый угол наклона автомата перекоса (т.е. все три его кольца меняют плоскость относительно вала 3, что видно на Фиг.4). Изменение угла наклона автомата перекоса в свою очередь перемещает первые тяги 8 так, что плавное изменяется угол установки каждой лопасти в течение каждого оборота ветроколеса, когда лопасть проходит из крайнего нижнего положения в крайнее верхнее положение и наоборот.
Следует уточнить, что при вращении ветроколеса управление углом φ установки его лопастей 1 осуществляется двумя независимыми процессами: циклического управления с помощью угла Δφi шагом лопастей 1 и управления с помощью угла φ0 общим шагом лопастей 1. Циклическое управление шагом лопастей выполняется автоматом перекоса. Под действием тяг 13 управления кольца 28, 29 и 30 автомата перекоса наклоняются благодаря карданной передаче, вызывая через тяги 8 управляющими лопастями синусоидальное изменение углов Δφi установки лопастей 1 в заданном диапазоне (в нашем примере 0≤Δφi≤5°). В свою очередь это вызывает появление синусоидальной составляющей в крутящем моменте, а следовательно, в развиваемой ветроколесом мощности.
Управление общим углом φ0 установки всех лопастей 1 осуществляется одновременным поворотом каждой из них в своем осевом подвижном соединении относительно продольной оси лопасти посредством рычагов 7 и тяг 8 и служит для изменения общего режима ветроколеса при заданной скорости вращения: при одновременном увеличении угла установки всех лопастей мощность увеличивается; при одновременном уменьшении углов - уменьшается.
При этом на Фиг.5 представлены графики изменения мощностей трехлопастного ветроколеса за один оборот для указанной ветроэнергетической установки "Радуга 1". Графики 3 и 4 характеризуют, соответственно, суммарную и среднюю от этой суммарной (т.е. интегральную) мощности ветроколеса при плавном регулировании предлагаемым способом углов установки его лопастей в диапазоне 0°≤φi≤5°. Согласно графику 3, суммарная мощность за один оборот ветроколеса совершает три колебания в диапазоне 1,3646 МВт≤Рсум≤1,4618 МВт, а согласно графику 4 средняя мощность равна Рср≈1,4197 МВт. Там же для сравнения приведены графики 1 и 2 - соответственно суммарной и средней мощностей ветроколеса при угле установки его лопастей φ0=Δφi=0°=const, т.е. без регулирования предлагаемым способом углов установки лопастей. При этом график суммарной мощности за один оборот ВК совершает также три колебания в диапазоне 1,3065 МВт≤Рсум(φ=0)≤1,3747 МВт, а средняя мощность равна Рст(φ=0)≈1,354 МВт.
Из сравнения Рср и Рср(φ=0) очевидно повышение использования установленной мощности ветроэнергетической установки при предлагаемом регулировании углов установки лопастей ветроколеса, что в свою очередь позволяет увеличить выработку электроэнергии ветроэнергетической установкой. Одновременно упрощена ветроэнергетическая установка (т.к. блок 9 управления лопастями и блоки 12 управления углом установки лопасти выполнены неподвижными) и повышена ее надежности (т.к. автомат перекоса 14 обладает наивысшей авиационной надежностью).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2444646C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2024 |
|
RU2827342C1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ С ДВУМЯ ВЕТРОКОЛЕСАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2522256C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ДВУМЯ ВЕТРОКОЛЕСАМИ | 2022 |
|
RU2784255C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА С ДВУМЯ ВЕТРОКОЛЕСАМИ | 2019 |
|
RU2727276C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2468251C1 |
| Привод лопастей ветроэнергетической установки | 2024 |
|
RU2838441C1 |
| ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 2013 |
|
RU2523706C1 |
| ДВУХРОТОРНАЯ ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА (ВАРИАНТЫ) | 2014 |
|
RU2574194C1 |
| Система управления ветрогенератором | 2020 |
|
RU2750080C1 |

Предлагаемое устройство управления ветроэнергетической установкой может быть использовано в области ветроэнергетики, конкретно - при управлении ветроэнергетической установкой. Техническая задача, решаемая предлагаемым изобретением, состоит в упрощении ветроэнергетической установки и в повышении ее надежности. Поставленная техническая задача решается тем, что известное устройство управления ветроэнергетической установкой дополнительно снабжено автоматом перекоса вертолета, блок управления лопастями содержит не менее трех блоков управления углом установки лопасти, третий вход блоков управления углом установки лопасти соединен с энергосистемой, при этом входы автомата перекоса вертолета соединены со вторыми тягами, выходы соединены с первыми тягами, а вал ветроколеса является и валом автомата перекоса вертолета. 6 ил.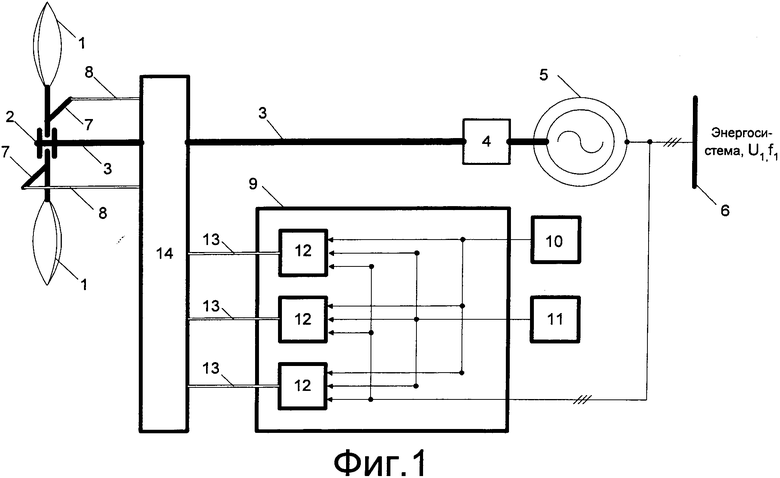
Устройство управления ветроэнергетической установкой, содержащее лопасти ветроколеса, ступицу и вал ветроколеса, мультипликатор, электрогенератор, энергосистему, рычаги и первые тяги по числу лопастей, блок управления лопастями, датчик скорости ветра, задатчик общего угла установки лопастей ветроколеса, блоки управления углом установки лопасти, выход каждого из которых соединен со своей второй тягой, первый и второй входы блоков управления углом установки лопасти соединены соответственно с выходами датчика скорости ветра и задатчика угла установки лопасти, при этом лопасти ветроколеса выполнены каждая с возможностью вращения вокруг своей продольной оси в ступице ветроколеса, вал ветроколеса соединен с валом электрогенератора, статорная обмотка которого подсоединена к энергосистеме, каждая лопасть ветроколеса ортогонально ее продольной оси вращения жестко соединена с рычагом, который шарнирно соединен с тягой, отличающееся тем, что, оно дополнительно снабжено автоматом перекоса вертолета, установленным на валу ветроколеса, вторыми тягами, блок управления лопастями содержит не менее трех блоков управления углом установки лопасти, третий вход блоков управления углом установки лопасти соединен с энергосистемой, при этом входы автомата перекоса вертолета соединены со вторыми тягами, выходы соединены с первыми тягами.
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2444646C1 |
| Способ изготовления массы для копировальной бумаги | 1932 |
|
SU27555A1 |
| Горизонтальное ветроколесо | 1982 |
|
SU1086208A1 |

