Изобретение относится к ветроэнергетике и может быть использовано для повышения энергоэффективности ветроэнергетических установок (ВЭУ).
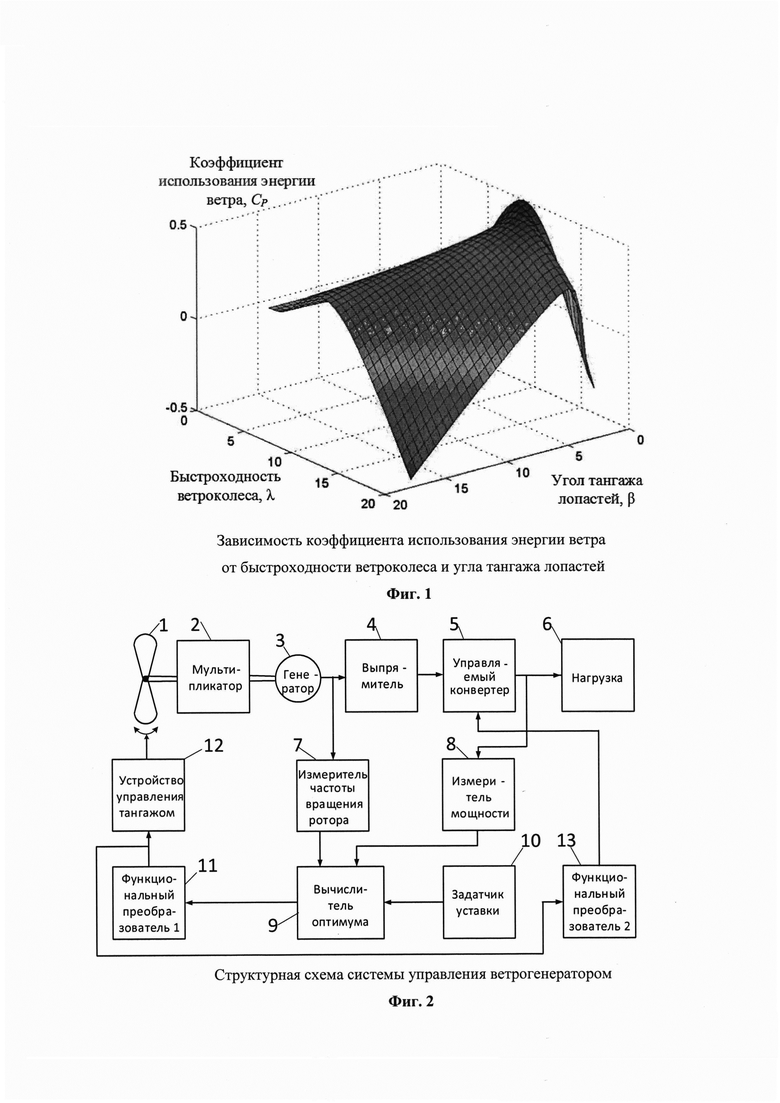
Для ветроэнергетических установок определяющим коэффициент преобразования энергии ветра в механическую энергию ветроколеса является коэффициент использования энергии ветра CP, в сущности своей являющимся аналогом понятия коэффициент полезного действия. В свою очередь, CP зависит от угла тангажа лопастей β (угла поворота лопастей относительно своей оси) и быстроходности ветроколеса λ. Эта зависимость имеет ярко выраженный оптимум (фиг. 1). Быстроходность ветроколеса определяется соотношением скорости ветра и частотой вращения ветроколеса, которое может регулироваться электромагнитным моментом синхронного генератора, зависящего от его генерируемой электрической мощности.
Одним из способов решения задачи повышения энергоэффективности ветрогенератора является измерение скорости ветра отдельным датчиком, и соответствующая подстройка параметров ветрогенератора, однако точность измерения ветра, особенно в зоне действия ветроколеса, как правило, мала и приводит к значительным отклонениям от оптимума.
Существует ряд технических решений, в которых скорость ветра определяется бездатчиковым способом. Эта группа методов использует определение максимума энергоэффективности с помощью оценки наклона кривой изменения генерируемой мощности.
Наиболее эффективным способом добиться максимальной энергоотдачи ветрогенератора при изменении скорости ветра можно согласованным изменением угла тангажа и мощности синхронного генератора.
Известен способ регулирования отбора мощности ветродвигателя, патент WO 2018/111128 А1 в котором управление ВЭУ осуществляется при помощи регулируемой системы отбора мощности ветродвигателя, состоящей из синхронного электрического генератора на постоянных магнитах, активного выпрямителя с микропроцессорным контроллером, блока питания, системы торможения, балластной нагрузки и понижающего преобразователя. Для данной структуры ВЭУ реализован способ регулирования, обеспечивающий повышение коэффициента преобразования энергии ветра во всем диапазоне рабочих скоростей и стабилизирующий электромагнитный момент на валу генератора при скорости ветра выше расчетной, соответствующей номинальному значению мощности. Способ регулирования основан на управлении частотой вращения ветродвигателя в соответствии с алгоритмом поиска оптимальной частоты вращения, который оценивает изменение вырабатываемой энергии на заданном интервале времени и производит задание нового значения частоты вращения.
Недостатком предложенного технического решения является необходимость постоянного принудительного изменения скорости вращения ротора, сложность определения пика характеристики при постоянно изменяющейся скорости ветра, большее возмущение ветра приведет к более высокому значению амплитуды колебаний вокруг пиковой точки, что уменьшает быстродействие метода.
Известен способ повышения мощности ветровой турбины с использованием модели прогнозирования, патент WO 2017/059862 А1. Патент описывает способ управления ветровой турбиной при повышении мощности или быстром увеличением выработки активной мощности. Вырабатывается команда ускорения, и на основании текущего рабочего состояния и уровня форсирования вычисляется прогнозируемая траектория управления с использованием подпрограммы прогнозного управления модели. Ветровая турбина управляется с использованием рассчитанной траектории управления во время повышения мощности.
Устройство, реализующее описанный способ, содержит ветротурбину, содержащую лопасти, которые механически связаны с электрическим генератором через коробку передач. Электрическая мощность, генерируемая генератором, вводится в электрическую сеть через управляемый электрический преобразователь. Система управления содержит ряд элементов, включая, по меньшей мере, один контроллер с процессором и памятью, так что процессор способен выполнять вычислительные задачи на основе инструкций, хранящихся в памяти. Контроллер ветротурбины обеспечивает то, что при работе ветротурбина генерирует требуемый уровень выходной мощности. Это достигается путем регулировки угла тангажа лопастей ветрогенератора и/или выходной мощностью преобразователя. С этой целью система управления содержит систему управления тангажом лопастей с помощью контроллера тангажа, использующий сигнал управления, формируемый основным контроллером, и систему управления преобразователем, включающую в себя контроллер мощности, использующий в качестве управляющего сигнал, формируемый основным контроллером. Ротор ветродвигателя содержит лопасти, которые могут быть наклонены с помощью тангажного механизма. Система управления реализует процедуру прогнозного управления моделью, которая запрограммирована для приема текущего рабочего состояния ветротурбины. На основании текущего рабочего состояния вычисляются одна или несколько прогнозируемых эксплуатационных траекторий, включающих в себя, по меньшей мере, одну прогнозируемую эксплуатационную траекторию, которая обычно, по меньшей мере, включает в себя уставку тангажа и уставку мощности.
Недостатком предложенного технического решения является решения только задачи повышения вырабатываемой мощности и не учитываются режимы работы при малых скоростях ветра, когда уровень генерируемой мощности падает и требуется максимизировать генерируемую мощность. К недостаткам можно отнести также наличие ограниченного количества траекторий, по которым осуществляется управления ветрогенератором, что сужает функциональные возможности системы.
Наиболее близким является способ преобразования механической энергии ветроколеса в электрическую энергию аккумуляторной батареи и система для его реализации, патент на изобретение RU 2239722. Представлен способ преобразования механической энергии ветроколеса в электрическую энергию заряда аккумуляторной батареи, включающий две ступени преобразования: на первой ступени механическую энергию ветроколеса преобразуют в электрическую энергию переменного тока с помощью синхронного генератора, на второй ступени электрическую энергию переменного тока преобразуют в энергию постоянного тока заряда аккумуляторной батареи, в систему вводят регулятор тока возбуждения генератора, получающий питание от независимого источника (аккумуляторной батареи), и импульсный регулятор постоянного тока, повышающий выходное напряжение выпрямителя до величины, обеспечивающей заряд аккумулятора во всем рабочем диапазоне изменения скорости ветроколеса, ток заряда аккумуляторной батареи регулируют в функции скорости ветра по закону, обеспечивающему максимум отбираемой от ветроколеса мощности, ток возбуждения генератора регулируют в функции частоты напряжения генератора по закону, обеспечивающему максимум КПД системы, а при скоростях ветроколеса и генератора, близких к максимальным рабочим, когда повышающий регулятор выводится из работы, ток возбуждения генератора поддерживают постоянным, близким к его номинальному значению.
Система для преобразования механической энергии ветроколеса в электрическую энергию заряда аккумуляторной батареи, содержащая ветроколесо, мультипликатор, синхронный генератор и аккумуляторную батарею с нагрузкой, неуправляемый выпрямитель и регулятор тока возбуждения синхронного генератора, дроссель, диод и ключевой элемент; сигнал управления ключевым элементом снимается с выхода системы автоматического регулирования тока заряда аккумулятора, сигнал задания снимается с выхода функционального преобразователя, вход которого соединен с выходом датчика скорости ветра и который реализует оптимальное соотношение скоростей ветра и ветроколеса, при котором мощность, вырабатываемая ветроколесом, остается максимальной во всех рабочих режимах установки, а сигнал текущего значения частоты напряжения генератора снимается с выхода датчика частоты - преобразователя частоты напряжения синхронного генератора в аналоговый сигнал.
К недостаткам предложенного технического решения можно отнести наличие датчика скорости ветра, который имеет, как правило, малую точность из-за мешающего воздействия ветроколеса. Одним из управляющих воздействий является управление током возбуждения синхронного генератора, а это приводит к уменьшению коэффициента полезного действия генератора в некоторых режимах. Также необходимость регулирования тока возбуждения синхронного генератора исключает возможность использования генераторов на постоянных магнитах, которые особенно часто используются в ветроэнергетических установках малой и средней мощности.
Задачей изобретения является повышение энергоэффективности ветрогенератора путем подстройки угла поворота лопастей ветроколеса относительно своей оси (тангажа) и коэффициента преобразования управляемого конвертера при изменении скорости ветра и/или сопротивления нагрузки за счет измерения скорости вращения ротора генератора и выходной мощности, передаваемой в нагрузку, вычисления оптимума, при котором генерируется максимальная мощность, вычисления управляющих воздействий на устройство управления тангажом и управляемый конвертер и передачи этих воздействий на соответствующие управляющие устройства.
Поставленная задача решается тем, что в систему управления ветрогенератором, которая состоит из ветроколеса, имеющего лопасти с возможностью поворота относительно оси с помощью устройства управления тангажом, мультипликатора, синхронного генератора, выпрямителя, измерителя частоты вращения ротора, управляемого конвертера, измерителя мощности и нагрузки, дополнительно введены вычислитель оптимума, первый и второй функциональные преобразователи, задатчик уставки, при этом выходы измерителя частоты вращения ротора и измерителя мощности соединены с первым и вторым входом вычислителя оптимума, третий вход которого связан с выходом задатчика уставки, выход вычислителя оптимума присоединен к входу первого функционального преобразователя, выход которого связан с входами второго функционального преобразователя и устройства управления тангажом, при этом устройство управления тангажом изменяет угол поворота лопастей ветроколеса относительно своей оси, второй функциональный преобразователь связан с управляющим входом управляемого конвертера и изменяет его коэффициент преобразования.
Структурная схема системы управления ветрогенератором представлена на фиг. 2. Бетроколесо 1 связано механическим валом с мультипликатором 2, выходной вал которого присоединен к ротору синхронного генератора 3, сигнал с которого через выпрямитель 4, управляемый конвертер 5 передается в нагрузку 6, при этом к выходу генератора подключен измеритель частоты вращения ротора 7, к выходу управляемого конвертера 5 присоединен измеритель мощности 8, вычислитель оптимума 9 связан первым, вторым и третьим входами к выходам измерителя частоты вращения ротора 7, измерителя мощности 8 и задатчика уставки 10, а вычислитель оптимума управляет первым 11 и вторым 13 функциональными преобразователями и устройством управления тангажом 12.
Система работает следующим образом. При включении ветрогенератора задатчик уставки 10, в который информацию о конфигурации системы задают один раз вручную, передает в вычислитель оптимума 9 информацию о типе ветроколеса 1, мультипликатора 2, синхронного генератора 3, выпрямителя 4, управляемого конвертера 5 и номинальной выходной мощности, передаваемой ветрогенератором в нагрузку 6. В процессе работы сигналы с измерителя частоты вращения ротора 7 и измерителя мощности 8 поступают на устройство поиска оптимума 9, которое с помощью метода поиска экстремума - метода градиентного спуска выявляет минимум целевой функции, выдает управляющий сигнал на первый функциональный преобразователь 11, вычисляющий управляющий сигнал для устройства управления тангажом 12, которое изменяет угол поворота лопастей относительно своей оси β. Второй функциональный преобразователь 13 в соответствии с величиной β вычисляет сигнал управления d для управляемого конвертера, тем самым изменяя выходной ток синхронного генератора 3 и быстроходность ветрогенератора.
В некоторый момент времени вектор xk из пространства векторов X={x1, х2, …, xn} определяет состояние ВЭУ 
Каждое следующее значение xk+1 должно вести к уменьшению значения функции ƒ: 
Таким образом, расстояние xk+1=xk+Δxk, должно вести к уменьшению функции ƒ, то есть когда 
где gk - градиент, показывающий направление наибольшего возрастание функции ƒ в точке xk, а αk - коэффициент, определяющий скорость движения по функции ƒ(x).
При изменении скорости ветра или мощности, отдаваемой в нагрузку, система управления отслеживает изменение генерируемой мощности, соответственно изменяет угол тангажа лопастей β ветроколеса 1 и сигнал управления управляемым конвертером 5 d, настраивая систему на максимальную генерацию мощности при текущих условиях.
Предлагаемая стратегия управления базируется на определении целевой функции ƒ(d, β), имеющей экстремум в точке, максимально приближенной к номинальным эксплуатационным характеристикам электрического генератора, на базе которого спроектирована ВЭУ.
Для ветрогенератора, структурная схема которого представлена на фиг. 2, управляемыми являются два параметра: угол тангажа лопасти ветроколеса β 1 и сигнал управления управляемым конвертером d 5, определяющий его выходное напряжение, как долю входного напряжения (коэффициент заполнения управляющего широтно-импульсно моделированного сигнала). Данные параметры являются управляемыми, а значит могут быть приняты, как переменные для целевой функции ƒ(d, β).
Контролируемыми параметрами ВЭУ являются скорость вращения ротора синхронного генератора n и выходная электрическая мощность управляемого конвертера Р. Максимальное приближение данных параметров к номинальным значениям РНОМ и «ном расценивается как достижение оптимального состояния системы. В связи с этим целесообразно определить целевую функцию, как комбинацию относительных расстояний генерируемой мощности ΔРОТН и скорости вращения ΔnОТН от соответствующих номинальных значений:

Очевидно, что сумма ΔРОТН + ΔnОТН стремится к нулю, в случае достижения обоих параметров номинальных значений. Однако в случае, когда скорость ветра ниже средней, на которую рассчитаны параметра ветрового генератора, генерируемая мощность не достигает номинальной, а значит ΔРОТН≠0. При этом сумма ΔРОТН + ΔnОТН может достигать экстремума в окрестности наименьших значений ΔnОТН, которые не обеспечивают минимального значения ΔРОТН, а значит максимального приближения Р к номинальному значению. Относительное расстояние по оборотам ΔnОТН нуждается в весовом коэффициенте, определяющем его приоритет по отношению к ΔРОТН. Таким коэффициентом может служить отношение Р/РНОМ, который тем больше, чем выше генерируемая электрическая мощность. Нормированная целевая функция имеет следующий вид:
На основании полученных значений мощности и скорости вращения Р и n, зависящих от угла тангажа лопастей ветроколеса 1 β и сигнала управления управляемого конвертера 5 d по формуле (2) определяется поверхность, соответствующая целевой функции ƒ(d, β). Функция имеет глобальный минимум (фиг. 3).
После вычисления глобального минимума целевой функции с помощью вычислителя оптимума 9 первый 11 и второй функциональные преобразователи 13 вычисляют значения параметров сигнала управления управляемым конвертером 5 d и углом тангажа лопастей ветроколеса 1 β чтобы ветрогенератор вырабатывал электроэнергию, максимальную для текущего скорости ветра и потребляемой электрической мощности (фиг. 4).
Таким образом, контроль частоты вращения ротора синхронного генератора и электрической мощности, передаваемой в нагрузку, а также управление углом тангажа лопастей ветроколеса и коэффициентов преобразования управляемого конвертера позволяют повысить энергоэффективность ветрогенератора при изменении скорости ветра и сопротивления путем вычисления экстремального значения целевой функции и соответствующих величин угла тангажа лопастей ветроколеса и управляющего сигнала управляемого конвертера.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления ветрогенератором | 2019 |
|
RU2730751C1 |
| Система управления ветрогенератором | 2021 |
|
RU2787630C1 |
| Ветрогенератор | 2017 |
|
RU2674815C2 |
| СПОСОБ УПРАВЛЕНИЯ ВЕТРОГЕНЕРАТОРОМ | 2021 |
|
RU2768140C1 |
| Стабилизированный вентильный аксиально-конический ветрогенератор постоянного тока | 2018 |
|
RU2688925C1 |
| Стабилизированный вентильный аксиально-радиальный ветрогенератор постоянного тока | 2018 |
|
RU2689211C1 |
| Система автономного электроснабжения | 2023 |
|
RU2802054C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ВЕТРОЭНЕРГЕТИЧЕСКОЙ УСТАНОВКИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2468251C1 |
| Синхронный электрический генератор с многополюсной комбинированной магнитной системой с постоянными магнитами | 2019 |
|
RU2709788C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОЭНЕРГЕТИЧЕСКОЙ СИСТЕМОЙ С ВЕТРОГЕНЕРАТОРАМИ | 2020 |
|
RU2754455C1 |

Изобретение относится к ветроэнергетике. Система управления ветрогенератором, включающая ветроколесо, имеющее лопасти с возможностью поворота относительно оси с помощью устройства управления тангажом. Ветроколесо связано механическим валом с мультипликатором, к выходному валу которого присоединен ротор синхронного генератора. К выходу синхронного генератора подключены выпрямитель и измеритель частоты вращения ротора. Выход выпрямителя соединен с управляемым конвертером, к выходу которого подключены нагрузка и измеритель мощности. Система содержит вычислитель оптимума, первый и второй функциональные преобразователи и задатчик уставки. Выходы измерителя частоты вращения ротора и измерителя мощности соединены с первым и вторым входом вычислителя оптимума, третий вход которого связан с выходом задатчика уставки. Выход вычислителя оптимума присоединен к входу первого функционального преобразователя, выход которого связан с входами второго функционального преобразователя и устройства управления тангажом. Устройство управления тангажом изменяет угол поворота лопастей ветроколеса относительно своей оси. Второй функциональный преобразователь связан с управляющим входом управляемого конвертера и изменяет его коэффициент преобразования. Техническим результатом является повышение энергоэффективности ветрогенератора. 4 ил.
Система управления ветрогенератором, состоящая из ветроколеса, имеющего лопасти с возможностью поворота относительно оси с помощью устройства управления тангажом, ветроколесо связано механическим валом с мультипликатором, к выходному валу которого присоединен ротор синхронного генератора, к выходу синхронного генератора подключены выпрямитель и измеритель частоты вращения ротора, выход выпрямителя соединен с управляемым конвертером, к выходу которого подключены нагрузка и измеритель мощности, отличающаяся тем, что с целью повышения энергоэффективности ветрогенератора в него дополнительно введены вычислитель оптимума, первый и второй функциональные преобразователи, задатчик уставки, при этом выходы измерителя частоты вращения ротора и измерителя мощности соединены с первым и вторым входом вычислителя оптимума, третий вход которого связан с выходом задатчика уставки, выход вычислителя оптимума присоединен к входу первого функционального преобразователя, выход которого связан с входами второго функционального преобразователя и устройства управления тангажом, при этом устройство управления тангажом изменяет угол поворота лопастей ветроколеса относительно своей оси, второй функциональный преобразователь связан с управляющим входом управляемого конвертера и изменяет его коэффициент преобразования.
| СПОСОБ ПРЕОБРАЗОВАНИЯ МЕХАНИЧЕСКОЙ ЭНЕРГИИ ВЕТРОКОЛЕСА В ЭЛЕКТРИЧЕСКУЮ ЭНЕРГИЮ АККУМУЛЯТОРНОЙ БАТАРЕИ И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2239722C2 |
| Система управления ветрогенератором | 2019 |
|
RU2730751C1 |
| КОНТРОЛЛЕР ТОРМОЖЕНИЯ И ЭЛЕМЕНТЫ УПРАВЛЕНИЯ ЕГО ВКЛЮЧЕНИЕМ ДЛЯ ВЕТРОВОЙ ТУРБИНЫ | 2006 |
|
RU2430463C2 |
| US 20180226908 A1, 09.08.2018 | |||
| Газостат | 1979 |
|
SU816696A1 |

