Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе обнаружения периодических стационарных объектов и к способу обнаружения периодических стационарных объектов.
Уровень техники
[0002] Ранее предложена система обнаружения объектов, которая создает разностное изображение из нескольких захваченных изображений, захваченных посредством камеры, и когда форма области, в которой присутствует разность в разностном изображении, изменяется к главной оси направления, в котором камера захватывает изображения, оценивает то, что разность показывает стационарный трехмерный объект (см. патентный документ 1).
Список библиографических ссылок
Патентная литература
[0003] Патентный документ 1. Публикация заявки на патент (Япония) № 2007-129560
Раскрытие изобретения
Техническая задача
[0004] Система обнаружения объектов, описанная в патентном документе 1, оценивает то, существует либо нет только один стационарный трехмерный объект. Следовательно, она испытывает затруднение при различении и распознавании стационарных трехмерных объектов, периодически присутствующих вдоль обочины, таких как опоры линии электропередач, дорожные указатели или телеграфные столбы (в дальнейшем называемые периодическими стационарными объектами), от другого трехмерного объекта.
[0005] Настоящее изобретение осуществлено, чтобы разрешать вышеуказанную проблему. Цель настоящего изобретения заключается в том, чтобы предоставлять систему обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов, которые обеспечивают высокоточное обнаружение периодических стационарных объектов.
Решение задачи
[0006] Аспектом настоящего изобретения является система обнаружения периодических стационарных объектов для обнаружения периодического стационарного объекта в окрестностях движущегося объекта. Система обнаружения периодических стационарных объектов включает в себя: устройство захвата изображений, смонтированное на движущемся объекте и допускающее захват изображения окрестностей движущегося объекта; модуль преобразования точки обзора, выполненный с возможностью осуществлять преобразование точки обзора для изображения, захваченного посредством устройства захвата изображений, чтобы создавать изображение вида с высоты птичьего полета; модуль извлечения характерных точек, выполненный с возможностью извлекать характерную точку трехмерного объекта из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из нескольких подобластей, включенных в предварительно определенную область; модуль вычисления данных формы сигнала, выполненный с возможностью вычислять данные формы сигнала, соответствующие распределению характерных точек, извлеченных посредством модуля извлечения характерных точек в предварительно определенной области для изображения вида с высоты птичьего полета; модуль обнаружения информации пиков, выполненный с возможностью обнаруживать информацию пиков данных формы сигнала; модуль обнаружения вариантов периодических стационарных объектов, выполненный с возможностью оценивать то, является или нет трехмерный объект, имеющий характерную точку, извлеченную посредством модуля извлечения характерных точек, вариантом периодического стационарного объекта, на основе того, равна или превышает либо нет информация пиков предварительно определенное первое пороговое значение; и модуль оценки периодических стационарных объектов, выполненный с возможностью определять то, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта обнаруживается посредством модуля обнаружения вариантов периодических стационарных объектов, и обнаружение осуществляется при предварительно определенном условии.
[0007] Другим аспектом настоящего изобретения является способ обнаружения периодических стационарных объектов для обнаружения периодических стационарных объектов в окрестностях движущегося объекта. Способ обнаружения периодических стационарных объектов включает в себя: этап захвата изображений для захвата изображения окрестностей движущегося объекта с использованием устройства захвата изображений, смонтированного на движущемся объекте; этап преобразования точки обзора для выполнения преобразования точки обзора для изображения, захваченного посредством устройства захвата изображений, чтобы создавать изображение вида с высоты птичьего полета; этап извлечения характерных точек для извлечения характерной точки трехмерного объекта из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из нескольких подобластей, включенных в предварительно определенную область; этап вычисления данных формы сигнала для вычисления данных формы сигнала, соответствующих распределению характерных точек, извлеченному на этапе извлечения характерных точек в предварительно определенной области для изображения вида с высоты птичьего полета; этап обнаружения информации пиков для обнаружения информации пиков данных формы сигнала; этап обнаружения вариантов периодических стационарных объектов для оценки того, является или нет трехмерный объект, имеющий характерную точку, извлеченную на этапе извлечения характерных точек, вариантом периодического стационарного объекта, на основе того, равна или превышает либо нет информация пиков предварительно определенное первое пороговое значение; и этап оценки периодических стационарных объектов для определения того, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта обнаруживается на этапе обнаружения вариантов периодических стационарных объектов, и обнаружение осуществляется при предварительно определенном условии.
Краткое описание чертежей
[0008] Фиг.1 является схемой принципиальной конфигурации системы обнаружения периодических стационарных объектов согласно первому варианту осуществления настоящего изобретения, иллюстрирующей пример, в котором система обнаружения периодических стационарных объектов монтируется на транспортном средстве.
Фиг.2 является видом сверху для иллюстрации состояния движения рассматриваемого транспортного средства, показанного на Фиг.1.
Фиг.3 является блок-схемой для иллюстрации подробностей модуля вычисления, показанного на Фиг.1.
Фиг.4 показывает виды сверху для иллюстрации общего представления обработки посредством модуля совмещения, показанного на Фиг.3, (a) иллюстрирует состояние движения рассматриваемого транспортного средства и (b) иллюстрирует общее представление совмещения.
Фиг.5 показывает виды для иллюстрации подробностей обработки посредством модуля вычисления вариантов величины перемещения, показанного на Фиг.3, (a) показывает разностное изображение PDt во время t и (b) показывает разностное изображение PDt-1 во время t-1.
Фиг.6 является блок-схемой последовательности операций способа для иллюстрации обработок посредством модуля совмещения и модуля обнаружения трехмерных объектов, показанного на Фиг.3.
Фиг.7 является блок-схемой последовательности операций способа для иллюстрации обработки посредством модуля определения периодичности, показанного на Фиг.3.
Фиг.8 является графиком, показывающим гистограмму, сформированную посредством счетного модуля, показанного на Фиг.3.
Фиг.9 является блок-схемой последовательности операций способа для иллюстрации обработок посредством модуля вычисления диапазона перемещения и модуля оценки периодических стационарных объектов, показанных на Фиг.3.
Фиг.10 показывает чертежи для иллюстрации подробностей этапа S27, показанного на Фиг.9, (a) иллюстрирует случай, в котором другое транспортное средство появляется перед периодическими стационарными объектами, (b) показывает гистограмму в случае (a), (c) иллюстрирует случай, в котором другое транспортное средство появляется на противоположной стороне от периодических стационарных объектов и (d) показывает гистограмму в случае (c).
Фиг.11 является схемой принципиальной конфигурации системы обнаружения периодических стационарных объектов согласно второму варианту осуществления настоящего изобретения, иллюстрирующей пример, в котором система обнаружения периодических стационарных объектов монтируется на транспортном средстве.
Фиг.12 является видом для иллюстрации состояния движения рассматриваемого транспортного средства, показанного на Фиг.11, и диапазона захвата устройства захвата изображений.
Фиг.13 является блок-схемой для иллюстрации подробностей модуля вычисления, показанного на Фиг.11.
Фиг.14 является видом для иллюстрации подробных операций модуля вычисления распределения краев, счетного модуля, модуля обнаружения вариантов периодических стационарных объектов и модуля оценки периодических стационарных объектов, показанных на Фиг.13.
Фиг.15 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно второму варианту осуществления настоящего изобретения.
Фиг.16 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно второму варианту осуществления настоящего изобретения, иллюстрирующей обработки после Фиг.15.
Фиг.17 является блок-схемой для иллюстрации подробностей модуля вычисления системы обнаружения периодических стационарных объектов согласно третьему варианту осуществления настоящего изобретения.
Фиг.18 показывает графики для иллюстрации подробных операций модуля совмещения на Фиг.17.
Фиг.19 показывает графики для иллюстрации подробных операций модуля вычисления разности на Фиг.17, (a) иллюстрирует разность в случае, если форма сигнала распределения краев извлекается из периодических стационарных объектов, и (b) иллюстрирует разность в случае, если форма сигнала распределения краев извлекается из движущихся объектов.
Фиг.20 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно третьему варианту осуществления настоящего изобретения, соответствующей Фиг.16.
Фиг.21 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно модифицированному примеру третьего варианта осуществления настоящего изобретения, соответствующей Фиг.16.
Осуществление изобретения
[0009] Первый вариант осуществления
В дальнейшем в этом документе описываются предпочтительные варианты осуществления настоящего изобретения на основе чертежей. Фиг.1 является схемой принципиальной конфигурации системы 1 обнаружения периодических стационарных объектов согласно первому варианту осуществления настоящего изобретения, иллюстрирующей пример, в котором система 1 обнаружения периодических стационарных объектов монтируется на рассматриваемом транспортном средстве V. Система 1 обнаружения периодических стационарных объектов, показанная на Фиг.1, выполнена с возможностью обнаруживать периодические стационарные объекты в окрестностях рассматриваемого транспортного средства V и, в частности, обнаруживать стационарные объекты, периодически присутствующие вдоль обочины, такие как опоры линии электропередач, дорожные указатели или телеграфные столбы. В этой связи, в следующих примерах описывается рассматриваемое транспортное средство V в качестве примера движущегося объекта. Тем не менее движущийся объект не ограничен рассматриваемым транспортным средством V и может быть любым другим движущимся объектом, таким как мотоцикл или велосипед.
[0010] Система 1 обнаружения периодических стационарных объектов включает в себя камеру 10 (устройство захвата изображений), датчик 20 скорости транспортного средства (детектор скорости) и модуль 30 вычисления. Камера 10, показанная на Фиг.1, устанавливается в позиции на высоте h и в задней части рассматриваемого транспортного средства V таким образом, что ее оптическая ось формирует угол θ наклона вниз относительно горизонтальной линии. Камера 10 выполнена с возможностью захватывать изображение предварительно определенной области определения из этой позиции. Датчик 20 скорости транспортного средства выполнен с возможностью определять скорость движения рассматриваемого транспортного средства V и вычислять скорость из скорости вращения колес, определенной посредством датчика скорости вращения колес, предоставляемого на колесе, чтобы определять, например, число оборотов. Модуль 30 вычисления выполнен с возможностью обнаруживать периодический стационарный объект в окрестностях рассматриваемого транспортного средства V на основе изображения, захваченного посредством камеры 10, и сигнала из датчика 20 скорости транспортного средства.
[0011] Фиг.2 является видом сверху для иллюстрации состояния движения рассматриваемого транспортного средства V, показанного на Фиг.1. Как показано на Фиг.2, камера 10 захватывает изображение области сзади транспортного средства под предварительно определенным углом a обзора. В этом случае камера 10 имеет широкий угол a обзора и допускает захват изображения полосы движения, по которой движется рассматриваемое транспортное средство V, а также обочины, на которой присутствует периодический стационарный объект.
[0012] Фиг.3 является блок-схемой для иллюстрации подробностей модуля 30 вычисления, показанного на Фиг.1. Следует отметить, что на Фиг.3 также проиллюстрированы камера 10 и датчик 20 скорости транспортного средства, чтобы прояснять взаимосвязь соединений.
[0013] Как показано на Фиг.3, модуль 30 вычисления включает в себя модуль 31 преобразования точки обзора, модуль 32 совмещения, модуль 33 обнаружения трехмерных объектов, модуль 34 вычисления вариантов величины перемещения, счетный модуль 35, модуль 36 вычисления диапазона перемещения, модуль 37 оценки периодических стационарных объектов и модуль 38 обнаружения смены полосы движения (модуль обнаружения поперечного движения).
[0014] Модуль 31 преобразования точки обзора выполнен с возможностью принимать захваченные данные изображений, полученные посредством захвата посредством камеры 10, и выполнять преобразование точки обзора, чтобы преобразовывать принятые захваченные данные изображений в данные изображений вида с высоты птичьего полета в состоянии просмотра с высоты птичьего полета. Состояние просмотра с высоты птичьего полета означает состояние просмотра со стороны виртуальной камеры, которая направлена, например, вертикально вниз в направлении от неба. Такое преобразование точки обзора выполняется так, как описано, например, в патентном документе 1.
[0015] Модуль 32 совмещения выполнен с возможностью последовательно принимать данные изображений вида с высоты птичьего полета, полученные через преобразование точки обзора посредством модуля 31 преобразования точки обзора, и совмещать позиции принимаемых данных изображений вида с высоты птичьего полета в различные моменты времени. Фиг.4 показывает виды сверху для иллюстрации общего представления обработки посредством модуля 32 совмещения, показанного на Фиг.3, (a) иллюстрирует состояние движения рассматриваемого транспортного средства V и (b) иллюстрирует общее представление совмещения.
[0016] Как показано на Фиг.4(a), допустим, что рассматриваемое транспортное средство V в текущее время находится в V1 и находилось в V2 во время на один временной сегмент раньше. Кроме того, другое транспортное средство VO находится в области сзади сбоку от рассматриваемого транспортного средства V и движется параллельно рассматриваемому транспортному средству V при условии, что другое транспортное средство VO в текущее время находится в VO1 и находилось в VO2 во время на один временной сегмент раньше. Дополнительно, допускается, что рассматриваемое транспортное средство V движется на расстояние d в одном временном сегменте. Следует отметить, что время на один временной сегмент раньше может быть временем на предварительно определенный период времени (например, один цикл управления) раньше текущего времени или может быть временем на произвольный период времени раньше текущего времени.
[0017] В этом состоянии изображение PBt вида с высоты птичьего полета в текущее время является таким, как показано на Фиг.4(b). В изображении PBt вида с высоты птичьего полета белая полоса дорожной разметки, нарисованная на дороге, имеет прямоугольную форму и находится в состоянии относительно точного просмотра сверху. Между тем, другое транспортное средство VO, расположенное в VO1, видно под наклоном. Кроме того, также в изображении PBt-1 вида с высоты птичьего полета во время на один временной сегмент раньше, белая полоса дорожной разметки, нарисованная на дороге, имеет прямоугольную форму и находится в состоянии относительно точного просмотра сверху. Тем не менее другое транспортное средство VO, расположенное в VO2, видно под наклоном.
[0018] Модуль 32 совмещения совмещает изображения PBt, PBt-1 вида с высоты птичьего полета, как описано выше, в данных. В этом случае модуль 32 совмещения смещает изображение PBt-1 вида с высоты птичьего полета во время на один временной сегмент раньше, чтобы согласовывать его позицию с позицией изображения PBt вида с высоты птичьего полета в текущее время. Величина d' смещения является величиной, соответствующей проезжаемому расстоянию d, показанному на Фиг.4(a), и определяется на основе сигнала из датчика 20 скорости транспортного средства и периода времени со времени на один временной сегмент раньше относительно текущего времени.
[0019] Модуль 33 обнаружения трехмерных объектов выполнен с возможностью обнаруживать несколько трехмерных объектов из данных по разностному изображению PDt. В частности, модуль 33 обнаружения трехмерных объектов выясняет разность между изображениями PBt, PBt-1 вида с высоты птичьего полета и создает данные по разностному изображению PDt. Здесь, пикселное значение разностного изображения PDt может быть задано посредством нахождения абсолютного значения разности между пикселными значениями изображений PBt, PBt-1 вида с высоты птичьего полета, или может быть задано как "1", когда абсолютное значение превышает предварительно определенное значение, и как "0", если не превышает предварительно определенное значение, чтобы подстраиваться под изменение окружения освещенности. Кроме того, модуль 33 обнаружения трехмерных объектов выполнен с возможностью оценивать то, что трехмерные объекты присутствуют в области, обнаруженной как "1" вышеуказанным способом, в данных по разностному изображению PDt.
[0020] Следует обратиться снова к Фиг.3. Модуль 34 вычисления вариантов величины перемещения выполнен с возможностью вычислять варианты величины перемещения нескольких трехмерных объектов, обнаруженных посредством модуля 33 обнаружения трехмерных объектов. Фиг.5 показывает виды для иллюстрации подробностей обработки посредством модуля 34 вычисления вариантов величины перемещения, показанного на Фиг.3, (a) показывает разностное изображение PDt во время t и (b) показывает разностное изображение PDt-1 во время t-1.
[0021] Во-первых, модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку контакта с землей (характерную точку) трехмерного объекта из данных по разностному изображению PDt-1 во время t-1, как показано на Фиг.5(b). Реперная точка контакта с землей означает контактную точку между трехмерным объектом и дорогой. В этом случае, модуль 34 вычисления вариантов величины перемещения обнаруживает, в качестве реперной точки контакта с землей, ближайшую позицию обнаруженного трехмерного объекта к камере 10 рассматриваемого транспортного средства V. Модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку контакта с землей в каждой области (подобласти), имеющей трехмерный объект, присутствующий в данных по разностному изображению PDt-1, который оценивается посредством модуля 33 обнаружения трехмерных объектов.
[0022] В частности, модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку P1 контакта с землей для трехмерного объекта O1, обнаруживает реперную точку P2 контакта с землей для трехмерного объекта O2 и обнаруживает реперную точку P3 контакта с землей для трехмерного объекта O3. Затем модуль 34 вычисления вариантов величины перемещения задает область T, имеющую ширину W в разностном изображении PDt во время t, как показано на Фиг.5(a). В этом случае, модуль 34 вычисления вариантов величины перемещения задает области T в позициях, соответствующих реперным точкам P1-P3 контакта с землей, в данных по разностному изображению PDt-1 во время t-1.
[0023] Затем модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку контакта с землей трехмерного объекта из данных по разностному изображению PDt во время t. В этом случае также модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку контакта с землей в каждой области (подобласти), имеющей трехмерный объект, присутствующий в данных по разностному изображению PDt, который оценивается посредством модуля 33 обнаружения трехмерных объектов. Модуль 34 вычисления вариантов величины перемещения обнаруживает ближайшую позицию обнаруженного трехмерного объекта, в качестве реперной точки контакта с землей, к камере 10 рассматриваемого транспортного средства V. В частности, модуль 34 вычисления вариантов величины перемещения обнаруживает реперную точку P4 контакта с землей для трехмерного объекта O4, обнаруживает реперную точку P5 контакта с землей для трехмерного объекта O5 и обнаруживает реперную точку P6 контакта с землей для трехмерного объекта O6. Таким образом, модуль 32 совмещения, модуль 33 обнаружения трехмерных объектов и модуль 34 вычисления вариантов величины перемещения выступают в качестве модуля извлечения характерных точек, выполненного с возможностью извлекать характерную точку (реперную точку контакта с землей) трехмерного объекта из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета (данных изображений в задней поперечной области разностного изображения) для каждой из нескольких подобластей (каждой области, имеющей согласно оценке трехмерный объект, присутствующий в данных изображений в разностном изображении), включенных в предварительно определенную область.
[0024] Дополнительно, модуль 34 вычисления вариантов величины перемещения связывает реперные точки контакта с землей друг с другом. В частности, модуль 34 вычисления вариантов величины перемещения связывает реперную точку P4 контакта с землей с реперной точкой P1 контакта с землей, связывает реперную точку P5 контакта с землей с реперной точкой P1 контакта с землей и связывает реперную точку P6 контакта с землей с реперной точкой P1 контакта с землей. Аналогично, модуль 34 вычисления вариантов величины перемещения связывает реперные точки P4-P6 контакта с землей с реперными точками P2 и P3 контакта с землей.
[0025] После этого модуль 34 вычисления вариантов величины перемещения вычисляет расстояния (т.е. варианты величины перемещения) между реперными точками P1-P6 контакта с землей, связанными таким образом. Затем модуль 34 вычисления вариантов величины перемещения задает вычисленные расстояния в качестве вариантов величины перемещения. Таким образом, модуль 34 вычисления вариантов величины перемещения вычисляет несколько вариантов величины перемещения для каждого трехмерного объекта. Это предотвращает проблему ошибочного вычисления величины перемещения периодического стационарного объекта, имеющего аналогичные признаки изображений, возникающую периодически в результате исключительного определения величины перемещения трехмерного объекта.
[0026] Следует отметить, что причина, по которой задается область T, состоит в том, что даже если возникает ошибка при совмещении изображений PBt, PBt-1 вида с высоты птичьего полета вследствие "галопирования", отклонения по вертикальной оси и т.п. рассматриваемого транспортного средства V, реперные точки P1-P6 контакта с землей стабильно связаны друг с другом. Дополнительно, связывание реперных точек P1-P6 контакта с землей определяется посредством процесса согласования для распределения яркости вокруг реперных точек контакта с землей изображений PBt, PBt-1 вида с высоты птичьего полета.
[0027] Следует обратиться снова к Фиг.3. Счетный модуль 35 выполнен с возможностью подсчитывать варианты величины перемещения, вычисленные посредством модуля 34 вычисления вариантов величины перемещения, и через подсчет формируется гистограмма (данные формы сигнала). Например, счетный модуль 35 подсчитывает значение как "3", когда расстояние между реперной точкой P1 контакта с землей и реперной точкой P4 контакта с землей, расстояние между реперной точкой P2 контакта с землей и реперной точкой P5 контакта с землей и расстояние между реперной точкой P3 контакта с землей и реперной точкой P6 контакта с землей являются идентичными. Таким образом, посредством подсчета вариантов величины перемещения и формирования гистограммы, счетный модуль 35 выступает в качестве модуля вычисления данных формы сигнала, выполненного с возможностью вычислять данные формы сигнала (на основе относительного взаимного расположения реперных точек контакта с землей), соответствующие распределению реперных точек контакта с землей в задней поперечной области разностного изображения.
[0028] Модуль 36 вычисления диапазона перемещения выполнен с возможностью вычислять диапазон перемещения периодического стационарного объекта для изображения вида с высоты птичьего полета на основе интервала захвата камеры 10 и скорости движения рассматриваемого транспортного средства V, определенной посредством датчика 20 скорости транспортного средства. Более конкретно, модуль 36 вычисления диапазона перемещения вычисляет диапазон перемещения, имеющий допустимый запас в предварительно определенном диапазоне для скорости рассматриваемого транспортного средства V. Здесь, допустимый запас составляет, например, ±10 км/ч. Более конкретно, модуль 36 вычисления диапазона перемещения вычисляет скорость трехмерного объекта, перемещающегося на один пиксел в одном цикле управления приблизительно при 5,5 км/ч, когда интервал захвата камеры 10 составляет 33 мс, а фактическое расстояние в направлении движения транспортного средства, покрываемое посредством одного пиксела, составляет 5 см. С учетом того, что точность изображений PBt, PBt-1 вида с высоты птичьего полета снижается вследствие движения транспортного средства, требуется допустимый запас в ±10 км/ч, чтобы делать допустимыми эти приблизительно 5,5 км/ч.
[0029] Модуль 37 оценки периодических стационарных объектов выполнен с возможностью оценивать то, являются или нет несколько трехмерных объектов, обнаруженных посредством модуля 33 обнаружения трехмерных объектов, периодическими стационарными объектами. Модуль 37 оценки периодических стационарных объектов включает в себя модуль 37a обнаружения вариантов периодических стационарных объектов и модуль 37b определения периодичности. Модуль 37 оценки периодических стационарных объектов выполнен с возможностью оценивать то, являются или нет несколько трехмерных объектов, обнаруженных посредством модуля 33 обнаружения трехмерных объектов, периодическими стационарными объектами, на основе гистограммы, сформированной посредством счетного модуля 35, диапазона перемещения, вычисленного посредством модуля 36 вычисления диапазона перемещения, вариантов периодических стационарных объектов (стационарных объектов, которые могут быть периодическими стационарными объектами), обнаруженных посредством модуля 37a обнаружения вариантов периодических стационарных объектов, и периодичности, определенной посредством модуля 37b определения периодичности.
[0030] Далее описывается способ обнаружения периодических стационарных объектов в отношении блок-схем последовательности операций способа. Фиг.6 является блок-схемой последовательности операций способа для иллюстрации обработок посредством модуля 32 совмещения и модуля 33 обнаружения трехмерных объектов, показанных на Фиг.3. Во-первых, модуль 32 совмещения принимает данные по изображениям PBt, PBt-1 вида с высоты птичьего полета в различные моменты времени, определенные посредством модуля 31 преобразования точки обзора, для совмещения (S1). Затем модуль 33 обнаружения трехмерных объектов выясняет разность между данными по изображениям PBt, PBt-1 вида с высоты птичьего полета, совмещенным на этапе S1 (S2). После этого модуль 33 обнаружения трехмерных объектов выполняет преобразование в двоичную форму на основе предварительно определенного значения и создает данные по разностному изображению PDt (S3). Таким образом, завершаются обработки посредством модуля 32 совмещения и модуля 33 обнаружения трехмерных объектов.
[0031] Фиг.7 является блок-схемой последовательности операций способа для иллюстрации обработок посредством модуля 37a обнаружения вариантов периодических стационарных объектов и модуля 37b определения периодичности, показанных на Фиг.3. Фиг.8 является графиком для иллюстрации гистограммы, сформированной посредством счетного модуля 35, показанного на Фиг.3. Как показано на Фиг.8, счетный модуль 35 подсчитывает идентичные варианты величины перемещения, вычисленные для них. В частности, поскольку несколько величин m1, m2, m3, m4 перемещения обнаруживаются в примере, показанном на Фиг.8, эти значения счетчика являются высокими.
[0032] Как показано на Фиг.7 и 8, модуль 37a обнаружения вариантов периодических стационарных объектов сначала обнаруживает максимальное значение M (пиковое значение; информацию пиков) из гистограммы (S11). Затем модуль 37a обнаружения вариантов периодических стационарных объектов задает предварительно определенное пороговое значение Th1 на основе максимального значения M, обнаруженного на этапе S11 (S12). Здесь, предварительно определенное пороговое значение Th1 задается равным 70% от максимального значения M. Например, когда значение счетчика максимального значения M составляет "7", предварительно определенное пороговое значение Th1 задается равным "4,9". Поскольку предварительно определенное пороговое значение Th1 получается из максимального значения M из значений счетчика таким образом, можно задавать надлежащее пороговое значение, даже если размер значений счетчика значительно изменяется вследствие взаимного расположения между рассматриваемым транспортным средством V и трехмерными объектами, состояния солнечного освещения и т.п. Следует отметить, что в настоящем варианте осуществления предварительно определенное пороговое значение Th1 является значением в 70% от максимального значения M, но не ограничено этим.
[0033] Затем модуль 37a обнаружения вариантов периодических стационарных объектов обнаруживает локальные максимальные значения M1-M3 (пиковые значения; информацию пиков), равные или превышающие предварительно определенное пороговое значение Th1 (S13). Здесь, когда максимальное значение M составляет, например, "7", модуль 37a обнаружения вариантов периодических стационарных объектов обнаруживает локальные максимальные значения M1-M3, имеющие значение счетчика в "5" или больше. Таким образом, модуль 37a обнаружения вариантов периодических стационарных объектов выступает в качестве модуля обнаружения информации пиков, выполненного с возможностью обнаруживать информацию пиков гистограммы (данных формы сигнала). Дополнительно, модуль 37a обнаружения вариантов периодических стационарных объектов оценивает то, является или нет трехмерный объект, имеющий обнаруженную реперную точку контакта с землей, вариантом периодического стационарного объекта, на основе того, равна или превышает либо нет информация пиков предварительно определенное пороговое значение. В частности, например, модуль 37a обнаружения вариантов периодических стационарных объектов определяет то, что трехмерные объекты, связанные с вариантами величины перемещения, соответствующими локальным максимальным значениям M и M1-M3 (включающим в себя максимальное значение M) (например, когда расстояние между определенными двумя реперными точками контакта с землей совпадает с любым из локальных максимальных значений M и M1-M3, трехмерные объекты представляют собой два трехмерных объекта, имеющих реперные точки контакта с землей), являются вариантами периодических стационарных объектов.
[0034] После этого модуль 37b определения периодичности обнаруживает интервалы (информацию пиков) локальных максимальных значений M и M1-M3 (включающих в себя максимальное значение M) и отдает голос касательно обнаруженных интервалов (S14). В частности, в примере, показанном на Фиг.8, число голосов для интервала D1 составляет "2", а число голосов для интервала D2 составляет "1".
[0035] Затем модуль 37b определения периодичности определяет то, существует или нет периодичность (S15). В этом случае модуль 37b определения периодичности определяет периодичность на основе того, равно или превышает либо нет число голосов на этапе S14 предварительно определенное число голосов. Здесь, предварительно определенное число голосов составляет половину от числа трехмерных объектов, обнаруженных из изображения PBt вида с высоты птичьего полета. Следовательно, когда число трехмерных объектов, обнаруженных из изображения PBt вида с высоты птичьего полета, составляет "4", предварительно определенное число голосов составляет "2". Следует отметить, что предварительно определенное число голосов не ограничено вышеуказанным и может быть фиксированным значением.
[0036] Когда оценено то, что существует периодичность (S15: "Да"), модуль 37b определения периодичности понижает предварительно определенное пороговое значение Th1 на этапе S12 (S16). Затем обработка переходит к этапу S17. Следовательно, хотя предварительно определенное пороговое значение Th1 составляет, например, 70% от максимального значения M, предварительно определенное пороговое значение Th1 задается равным 60% от максимального значения M или другим значениям. Кроме того, период, в течение которого понижается предварительно определенное пороговое значение Th1, составляет приблизительно в районе 1 секунды. Каждый раз, когда оценено то, что существует периодичность, сбрасывается предварительно определенное пороговое значение Th1. Таким образом, то, существует или нет периодичность, оценивается из позиций, в которых возникают локальные максимальные значения M и M1-M3 из значений счетчика, т.е. интервалов. Когда оценено то, что существует периодичность, понижается предварительно определенное пороговое значение Th1. Соответственно, как только определяется периодичность, оценка периодических стационарных объектов может быть упрощена. Между тем, до тех пор пока не определяется периодичность, не понижается предварительно определенное пороговое значение Th1. Это позволяет предотвращать ошибочное определение трехмерных объектов вследствие ошибки совмещения и т.п.
[0037] Между тем, когда оценено то, что нет периодичности (S15: "Нет"), обработка переходит к этапу S17 без понижения предварительно определенного порогового значения Th1.
[0038] Таким образом, модуль 37b определения периодичности оценивает то, существует или нет периодичность, из числа голосов (информации пиков) касательно позиций, в которых возникают локальные максимальные значения M и M1-M3 (интервалов), причем локальные максимальные значения M и M1-M3 равны или превышают предварительно определенное пороговое значение Th1, на основе максимального значения M из значений счетчика вариантов величины перемещения. Это позволяет игнорировать локальное максимальное значение, которое является относительно небольшим значением (например, ссылка M4 с номером на Фиг.8), и периодичность может быть оценена еще точнее с небольшим влиянием шума.
[0039] На этапе S17 модуль 37b определения периодичности оценивает то, обнаруживает либо нет модуль 38 обнаружения смены полосы движения поперечное движение на указанное расстояние или более (S17). В частности, модуль 38 обнаружения смены полосы движения оценивает то, что обнаруживается поперечное движение на указанное расстояние или более, когда включен сигнал поворота, и обнаруженный угол поворота колес равен или выше указанного угла, определенного из скорости транспортного средства, определенной посредством датчика скорости транспортного средства.
[0040] В случае оценки того, что обнаруживается поперечное движение на указанное расстояние или более (S17: "Да"), когда предварительно определенное пороговое значение Th1 понижено на этапе S16, модуль 37b определения периодичности инициализирует пониженное пороговое значение Th1 (S18). Это позволяет обнаруживать периодические стационарные объекты надлежащим образом в соответствии с изменением окружения после того, как сменяется полоса движения. После этого завершается обработка, показанная на Фиг.7. Между тем, когда оценено то, что не обнаруживается поперечное движение на указанное расстояние или более (S17: "Нет"), обработка, показанная на Фиг.7, завершается без инициализации предварительно определенного порогового значения Th1.
[0041] Фиг.9 является блок-схемой последовательности операций способа для иллюстрации обработок посредством модуля 36 вычисления диапазона перемещения и модуля 37 оценки периодических стационарных объектов, показанных на Фиг.3. Как показано на Фиг.9, во-первых, модуль 36 вычисления диапазона перемещения вычисляет величину перемещения, соответствующую стационарным объектам (S21). В частности, модуль 36 вычисления диапазона перемещения вычисляет диапазон перемещения периодического стационарного объекта для изображения вида с высоты птичьего полета на основе интервала захвата камеры 10 и скорости движения рассматриваемого транспортного средства V, определенной посредством датчика 20 скорости транспортного средства. В этом случае модуль 36 вычисления диапазона перемещения вычисляет диапазон перемещения, имеющий допустимый запас в предварительно определенном диапазоне для скорости рассматриваемого транспортного средства V.
[0042] Затем модуль 37 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта обнаруживается посредством модуля 37a обнаружения вариантов периодических стационарных объектов, и обнаружение осуществляется при предварительно определенном условии. В частности, модуль 37 оценки периодических стационарных объектов оценивает то, присутствуют или нет локальные максимальные значения M и M1-M3 (пики на гистограмме) в диапазоне величины перемещения, вычисленной на этапе S21 (в диапазоне перемещения) (S22). При определении того, что любое из локальных максимальных значений M и M1-M3 присутствует в диапазоне величины перемещения (S22: "Да"), модуль 37 оценки периодических стационарных объектов оценивает то, что периодический стационарный объект присутствует (т.е. определяет то, что вариант периодического стационарного объекта, обнаруженный посредством модуля 37a обнаружения вариантов периодических стационарных объектов, является периодическим стационарным объектом) (S23). Другими словами, периодические стационарные объекты зачастую совмещаются через идентичные интервалы, и конкретное значение счетчика стремится быть большим. Помимо этого, поскольку периодический стационарный объект является стационарным, значение счетчика варианта величины перемещения должно быть в диапазоне перемещения, заданном с учетом скорости движущегося объекта и т.д. Таким образом, когда на этапе S22 определяется "Да", можно сказать, что несколько трехмерных объектов являются периодическими стационарными объектами. После этого завершается обработка, показанная на Фиг.9.
[0043] Между тем, при определении того, что любое из локальных максимальных значений M и M1-M3 не присутствует в вышеописанном диапазоне величины перемещения (S22: "Нет"), модуль 37 оценки периодических стационарных объектов оценивает то, определяет или нет модуль 37b определения периодичности, что существует периодичность (S24). При определении того, что модуль 37b определения периодичности не определяет, что существует периодичность (S24: "Нет"), модуль 37 оценки периодических стационарных объектов оценивает то, что трехмерный объект является движущимся объектом (S25). После этого завершается обработка, показанная на Фиг.9.
[0044] При определении того, что модуль 37b определения периодичности определяет, что существует периодичность (S24: "Да"), модуль 37 оценки периодических стационарных объектов обнаруживает апериодическое локальное максимальное значение из локальных максимальных значений, равных или превышающих предварительно определенное пороговое значение Th1 (S26). Апериодическое локальное максимальное значение является, например, локальным максимальным значением M3, показанным на Фиг.8. Интервал этого локального максимального значения M3 до смежного локального максимального значения отличается от интервалов для других локальных максимальных значений M, M1, M2. Следовательно, модуль 37 оценки периодических стационарных объектов определяет то, что это локальное максимальное значение M3 является апериодическим локальным максимальным значением, не обладающим периодичностью.
[0045] Дополнительно, когда не обнаруживается апериодическое локальное максимальное значение (S26: "Нет"), существует периодичность, и не присутствует апериодическое локальное максимальное значение. Соответственно, модуль 37 оценки периодических стационарных объектов оценивает то, что периодический стационарный объект присутствует (S23).
[0046] Между тем, когда обнаруживается апериодическое локальное максимальное значение (S26: "Да"), модуль 37 оценки периодических стационарных объектов оценивает то, ниже или нет периодические локальные максимальные значения M, M1, M2 предыдущих значений (S27). В этой обработке, модуль 37 оценки периодических стационарных объектов вычисляет среднее значение периодических локальных максимальных значений M, M1, M2 в текущей обработке, а также вычисляет среднее значение периодических локальных максимальных значений в предыдущей обработке. Затем модуль 37 оценки периодических стационарных объектов оценивает то, ниже либо нет среднее значение в текущей обработке среднего значения в предыдущей обработке на предварительно определенное значение или более.
[0047] При определении того, что периодические локальные максимальные значения M, M1, M2 ниже предыдущих значений (S27: "Да"), модуль 37 оценки периодических стационарных объектов оценивает то, что другое транспортное средство и т.п. появляется между рассматриваемым транспортным средством V и периодическими стационарными объектами, и обнаруживает движущийся объект (S25). После этого завершается обработка, показанная на Фиг.9.
[0048] Между тем, при определении того, что периодические локальные максимальные значения M, M1, M2 не ниже предыдущих значений (S27: "Нет"), модуль 37 оценки периодических стационарных объектов оценивает то, что другое транспортное средство и т.п. появляется на противоположной стороне периодического стационарного объекта при просмотре со стороны рассматриваемого транспортного средства V, и обнаруживает периодический стационарный объект (S23). После этого завершается обработка, показанная на Фиг.9.
[0049] Фиг.10 показывает чертежи для иллюстрации подробностей этапа S27, показанного на Фиг.9, (a) иллюстрирует случай, в котором другое транспортное средство VO появляется перед периодическими стационарными объектами; (b) показывает гистограмму в случае (a). Кроме того, (c) иллюстрирует случай, в котором другое транспортное средство VO появляется на противоположной стороне периодических стационарных объектов, и (d) показывает гистограмму в случае (c). Следует отметить, что на Фиг.10(b) и (d), пунктирная линия представляет гистограмму до того, как появляется другое транспортное средство, а сплошная линия представляет гистограмму после того, как появляется другое транспортное средство.
[0050] Во-первых, допустим, что другое транспортное средство VO появляется перед периодическими стационарными объектами, как показано на Фиг.10(a). В этом случае, поскольку периодические стационарные объекты блокируются посредством другого транспортного средства VO, значение счетчика периодического локального максимального значения стремится становиться меньшим, как показано на Фиг.10(b). В частности, когда другое транспортное средство VO появляется перед периодическими стационарными объектами, другое транспортное средство VO может присутствовать в позиции, в которой рассматриваемое транспортное средство V может сменять полосу движения. Следовательно, в таком случае, модуль 37 оценки периодических стационарных объектов обнаруживает другое транспортное средство VO (движущийся объект).
[0051] Напротив, допустим, что другое транспортное средство VO появляется на противоположной стороне периодических стационарных объектов, как показано на Фиг.10(c). В этом случае, периодические стационарные объекты не блокируются посредством другого транспортного средства VO. Таким образом, влияние на значение счетчика периодического локального максимального значения практически не оказывается, и значение счетчика периодического локального максимального значения не становится слишком небольшим. Когда другое транспортное средство VO появляется на противоположной стороне периодических стационарных объектов, другое транспортное средство VO не присутствует в позиции, в которой рассматриваемое транспортное средство V может сменять полосу движения. Соответственно, в таком случае, модуль 37 оценки периодических стационарных объектов обнаруживает периодические стационарные объекты.
[0052] В системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, реперная точка контакта с землей (характерная точка) трехмерного объекта извлекается из данных изображений в разностном изображении в задней поперечной области (предварительно определенной области) изображения вида с высоты птичьего полета для каждой области, имеющей согласно определению трехмерный объект, присутствующий в данных изображений в разностном изображении (для каждой из нескольких подобластей, включенных в предварительно определенную область); вычисляется гистограмма (данные формы сигнала), соответствующая распределению реперных точек контакта с землей в задней поперечной области для изображения вида с высоты птичьего полета; и то, является или нет трехмерный объект, имеющий извлеченную реперную точку контакта с землей, вариантом периодического стационарного объекта, определяется на основе того, равна или превышает либо нет информация пиков (пиковое значение, число голосов касательно интервалов пиков и т.д.) гистограммы предварительно определенное пороговое значение. Следовательно, система 1 обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов обеспечивают более четкое извлечение периодичности (повторяемости) периодических стационарных объектов в качестве информации пиков данных формы сигнала, и варианты периодических стационарных объектов могут проще извлекаться из трехмерных объектов, включенных в захваченное изображение. В силу этого, возможно более точное извлечение периодических стационарных объектов.
[0053] Периодические стационарные объекты зачастую являются стационарными объектами, имеющими аналогичные внешние виды и совмещенными через практически равные интервалы. Когда устройство захвата изображений захватывает изображение таких периодических стационарных объектов при движении, трудно сказать, какие элементы периодических стационарных объектов в предыдущем изображении соответствуют каким фрагментам в текущем изображении. Кроме того, в этом случае также трудно определять, что такие захваченные периодические стационарные объекты являются стационарными объектами или движущимися объектами. Дополнительно, периодические стационарные объекты могут быть ошибочно распознаны в качестве движущихся объектов, в зависимости от таких условий, как скорость движения движущегося объекта, интервал захвата устройства захвата изображений и отклонение по горизонтальной оси периодических стационарных объектов.
Система 1 обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов согласно настоящему варианту осуществления обеспечивают более точное извлечение периодических стационарных объектов из трехмерных объектов, включенных в захваченное изображение, и позволяют ошибочное распознавание периодических стационарных объектов в качестве движущихся объектов, как описано выше.
[0054] Периодические стационарные объекты формируют разностные области, периодически присутствующие в разностном изображении. Также трудно вычислять величины перемещения при связывании этих разностных периодических областей надлежащим образом с соответствующими фрагментами в предыдущем изображении, и трудно определять то, существуют или нет стационарные объекты.
В системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления вычисляются варианты величины перемещения обнаруженных нескольких трехмерных объектов и подсчитываются вычисленные варианты величины перемещения. Соответственно, подсчет выполняется, когда непонятно, какие периодические области разности надлежащим образом соответствуют каким фрагментам в предыдущем изображении. Затем, когда определено то, что значение счетчика в диапазоне перемещения движущегося объекта из таких подсчитанных значений счетчика вариантов величины перемещения равно или превышает пороговое значение Th1, определяется то, что несколько трехмерных объектов являются периодическими стационарными объектами. Здесь, периодические стационарные объекты зачастую совмещаются через идентичные интервалы, и конкретное значение счетчика стремится быть большим. Помимо этого, поскольку периодические стационарные объекты являются стационарными, значения счетчика вариантов величины перемещения должны быть в диапазоне перемещения, заданном с учетом скорости движущегося объекта и т.д. Таким образом, когда конкретное значение счетчика в диапазоне перемещения, заданном с учетом скорости движущегося объекта и т.д., равно или превышает предварительно определенное пороговое значение Th1, можно сказать, что несколько трехмерных объектов являются периодическими стационарными объектами. Следовательно, возможно определение с более высокой точностью периодических стационарных объектов.
[0055] Дополнительно, в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, несколько вариантов величины перемещения вычисляются для каждого трехмерного объекта. Это позволяет предотвращать проблему ошибочного вычисления величины перемещения периодических стационарных объектов, имеющих аналогичные признаки изображений, возникающую периодически в результате исключительного определения величины перемещения трехмерных объектов.
[0056] Помимо этого в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, предварительно определенное пороговое значение Th1 получается из максимального значения M из таких подсчитанных значений счетчика. Соответственно, можно задавать пороговое значение Th1 надлежащим образом, даже если размер значений счетчика значительно изменяется вследствие взаимного расположения между движущимся объектом и трехмерными объектами, состояния солнечного освещения и т.п.
[0057] Кроме того, в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, то, существует или нет периодичность, определяется из позиций, в которых возникают локальные максимальные значения M и M1-M3 из таких подсчитанных значений счетчика. Когда определено то, что существует периодичность, понижается предварительно определенное пороговое значение Th1. Соответственно, как только определяется периодичность, определение периодических стационарных объектов может быть упрощено. Между тем, до тех пор пока не определяется периодичность, не понижается предварительно определенное пороговое значение Th1. Это позволяет предотвращать ошибочное определение трехмерных объектов вследствие ошибки совмещения и т.п.
[0058] Кроме того, в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, периодичность определяется из позиций, в которых возникают локальные максимальные значения M и M1-M3, причем локальные максимальные значения M и M1-M3 равны или превышают предварительно определенное пороговое значение Th1, на основе максимального значения M из значений счетчика. Это позволяет игнорировать локальное максимальное значение, которое является относительно небольшим значением, и периодичность может быть оценена еще точнее с небольшим влиянием шума.
[0059] Кроме того, в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, когда обнаруживается поперечное движение на указанное расстояние или более, и понижено предварительно определенное пороговое значение Th1, инициализируется пониженное пороговое значение Th1. Таким образом, пороговое значение Th1 инициализируется, когда рассматриваемое транспортное средство V сменяет полосу движения. Это позволяет обнаруживать периодические стационарные объекты надлежащим образом в соответствии с изменением окружения после того, как сменяется полоса движения.
[0060] Дополнительно, в системе 1 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, в случае определения локального максимального значения M3, равного или превышающего предварительно определенное пороговое значение Th1, отличное от локальных максимальных значений M, M1, M2, имеющих согласно определению периодичность в текущей обработке, когда среднее значение локальных максимальных значений M, M1, M2, имеющих согласно определению периодичность в текущей обработке, не меньше среднего значения локальных максимальных значений, имеющих согласно определению периодичность в предыдущей обработке, на предварительно определенное значение или более, определяется то, что несколько трехмерных объектов являются периодическими стационарными объектами. Между тем, когда первое меньше второго на предварительно определенное значение или более, определяется то, что присутствует движущийся объект.
[0061] Кроме того, здесь, в качестве случая определения локального максимального значения M3, равного или превышающего предварительно определенное пороговое значение Th1, отличное от локальных максимальных значений M, M1, M2, имеющих согласно определению периодичность в текущей обработке, возможен случай, например, когда другое транспортное средство и т.п. появляется в пределах угла обзора. Такой случай, возможно, включает в себя случай, в котором другое транспортное средство и т.п. появляется на противоположной стороне периодических стационарных объектов при просмотре со стороны рассматриваемого транспортного средства V, и случай, в котором другое транспортное средство и т.п. появляется на передней стороне.
[0062] Когда другое транспортное средство и т.п. появляется на противоположной стороне, периодические стационарные объекты практически не оказывают влияние на периодические локальные максимальные значения M, M1, M2, и апериодическое локальное максимальное значение M3 стремится к обнаружению. Между тем, когда другое транспортное средство и т.п. появляется на передней стороне, периодические стационарные объекты блокируются посредством другого транспортного средства и т.п., и значения счетчика периодических локальных максимальных значений M, M1, M2 стремятся быть небольшими.
[0063] Следовательно, когда среднее значение локальных максимальных значений M, M1, M2, имеющих согласно определению периодичность в текущей обработке, не меньше среднего значения локальных максимальных значений, имеющих согласно определению периодичность в предыдущей обработке, на предварительно определенное значение или более, другое транспортное средство и т.п. находится на противоположной стороне периодических стационарных объектов, при этом рассматриваемое транспортное средство V не может сменять полосу движения. Следовательно, необязательно обнаруживать движущийся объект, к примеру другое транспортное средство. Между тем, когда среднее значение локальных максимальных значений M, M1, M2, имеющих согласно определению периодичность в текущей обработке, меньше среднего значения локальных максимальных значений, имеющих согласно определению периодичность в предыдущей обработке, на предварительно определенное значение или более, другое транспортное средство и т.п. присутствует перед периодическими стационарными объектами, при этом рассматриваемое транспортное средство V может сменять полосу движения. Следовательно, обнаруживается движущийся объект.
[0064] Таким образом, система 1 обнаружения периодических стационарных объектов и способ обнаружения периодических стационарных объектов согласно настоящему варианту осуществления позволяют осуществлять надлежащее определение в соответствии с фактическим явлением.
[0065] Следует отметить, что в вышеописанном варианте осуществления изображения, захваченные в текущее время и во время на один временной сегмент раньше, преобразуются в виды с высоты птичьего полета, и разностное изображение PDt создается посредством выполнения совмещения для преобразованных видов с высоты птичьего полета. Тем не менее настоящее изобретение не ограничено этим. Например, только изображение во время на один временной сегмент раньше преобразуется в вид с высоты птичьего полета; преобразованный вид с высоты птичьего полета подвергается совмещению и затем снова преобразуется в первоначально захваченное изображение; это изображение и изображение в текущее время могут быть использованы для того, чтобы создавать разностное изображение. Другими словами, виды с высоты птичьего полета не всегда должны создаваться явно при условии, что изображение в текущее время и изображение во время на один временной сегмент раньше совмещаются, чтобы создавать разностное изображение PDt из разности между такими совмещенными двумя изображениями.
[0066] Второй вариант осуществления
В дальнейшем в этом документе на основе чертежей описывается второй вариант осуществления настоящего изобретения. Следует отметить, что то, что эквивалентно тому, что описано в первом варианте осуществления, обозначается посредством идентичных ссылок с номерами, и описание означенного опускается.
[0067] Фиг.11 является схемой принципиальной конфигурации системы 2 обнаружения периодических стационарных объектов согласно настоящему варианту осуществления. Настоящий вариант осуществления описывает пример, в котором система 2 обнаружения периодических стационарных объектов монтируется на рассматриваемом транспортном средстве V. Как показано на Фиг.11, система 2 обнаружения периодических стационарных объектов включает в себя камеру 10 и модуль 40 вычисления.
[0068] Фиг.12 является видом для иллюстрации диапазона захвата камеры 10, показанной на Фиг.11 и т.д. Как показано на Фиг.12, камера 10 выполнена с возможностью захватывать изображение области сзади сбоку рассматриваемого транспортного средства V под предварительно определенным углом a обзора, аналогично первому варианту осуществления. Угол a обзора камеры 10 задается таким образом, что диапазон захвата камеры 10 может включать в себя смежную полосу движения или обочину в дополнение к полосе движения, в которой движется рассматриваемое транспортное средство V.
[0069] Модуль 40 вычисления выполняет различные обработки для фрагментов в областях A1, A2 обнаружения периодических стационарных объектов в захваченном изображении, захваченном посредством камеры 10. В силу этого, модуль 40 вычисления определяет то, являются или нет трехмерные объекты, присутствующие в областях A1, A2 определения, периодическими стационарными объектами. Области A1, A2 определения имеют прямоугольную форму при просмотре сверху. Позиции областей A1, A2 определения могут задаваться на основе относительных позиций для рассматриваемого транспортного средства V или могут задаваться на основе позиции белой полосы дорожной разметки посредством использования существующей технологии распознавания белых полос дорожной разметки и т.п. Форма областей A1, A2 определения для изображения вида с высоты птичьего полета не ограничена прямоугольной формой. Когда область определения является прямоугольной областью в фактическом пространстве, форма областей A1, A2 определения для изображения вида с высоты птичьего полета может быть трапецеидальной формой.
[0070] Стороны областей A1, A2 определения близко к рассматриваемому транспортному средству V (стороны вдоль направления движения) задаются как реперные линии L1, L2 контакта с землей. Реперные линии L1, L2 контакта с землей означают линии, в которых контактируют с землей другое транспортное средство VO, присутствующее на полосе движения, смежной с полосой движения, по которой движется рассматриваемое транспортное средство V, и периодический стационарный объект, присутствующий вдоль обочины.
[0071] Расстояние в направлении движения транспортного средства от заднего краевого фрагмента рассматриваемого транспортного средства V до передних краевых фрагментов областей A1, A2 определения определяется таким образом, что, по меньшей мере, области A1, A2 определения находятся в рамках угла a обзора камеры 10.
Кроме того, длина каждой из областей A1, A2 определения в направлении движения транспортного средства и ее ширина в направлении, ортогональном к направлению движения транспортного средства, определяется на основе размера периодического стационарного объекта, который должен быть обнаружен. В настоящем варианте осуществления, чтобы отличать периодический стационарный объект от другого транспортного средства VO, длина в направлении движения транспортного средства задается как длина, которая может включать в себя, по меньшей мере, другое транспортное средство VO. Помимо этого ширина в направлении, ортогональном к направлению движения транспортного средства, имеет длину, не включающую в себя полосы движения (т.е. вторые смежные полосы движения), которые являются дополнительно смежными с полосами движения, смежными на правой и левой стороне в изображении вида с высоты птичьего полета.
[0072] Фиг.13 является блок-схемой для иллюстрации подробностей модуля 40 вычисления, показанного на Фиг.11. Как показано на Фиг.13, модуль 40 вычисления включает в себя модуль 41 преобразования точки обзора, модуль 42 вычисления распределения краев, счетный модуль 43, модуль 44 обнаружения вариантов периодических стационарных объектов и модуль 45 оценки периодических стационарных объектов. Следует отметить, что модуль 40 вычисления является компьютером, состоящим из CPU, RAM, ROM и т.д. Модуль 40 вычисления выполняет обработку изображений и т.п. согласно программе, заданной заранее, чтобы тем самым реализовывать функцию каждого модуля, такого как модуль 41 преобразования точки обзора, модуль 42 вычисления распределения краев, счетный модуль 43, модуль 44 обнаружения вариантов периодических стационарных объектов и модуль 45 оценки периодических стационарных объектов.
[0073] Модуль 41 преобразования точки обзора выполнен с возможностью принимать захваченные данные изображений в предварительно определенной области, полученной посредством захвата посредством камеры 10. Модуль 41 преобразования точки обзора выполнен с возможностью осуществлять преобразование точки обзора, чтобы преобразовывать принятые захваченные данные изображений в данные изображений вида с высоты птичьего полета в состоянии просмотра с высоты птичьего полета. Состояние просмотра с высоты птичьего полета означает состояние просмотра со стороны виртуальной камеры, которая направлена, например, вертикально вниз (или немного под углом вниз) в направлении от неба.
[0074] Фиг.14 является видом для иллюстрации подробных операций модуля 42 вычисления распределения краев, счетного модуля 43, модуля 44 обнаружения вариантов периодических стационарных объектов и модуля 45 оценки периодических стационарных объектов. Следует отметить, что хотя Фиг.14 дает описание посредством иллюстрации только правой стороны в направлении движения транспортного средства, включающей в себя область A1 определения, модуль 42 вычисления распределения краев, счетный модуль 43, модуль 44 обнаружения вариантов периодических стационарных объектов и модуль 45 оценки периодических стационарных объектов выполняют идентичные обработки для области на левой стороне в направлении движения транспортного средства, включающей в себя область A2 определения.
[0075] Как показано на Фиг.13, модуль 42 вычисления распределения краев включает в себя модуль 42a извлечения краевых элементов и модуль 42b вычисления формы сигнала распределения краев. Модуль 42a извлечения краевых элементов выполнен с возможностью вычислять яркостное различие в данных изображений вида с высоты птичьего полета, полученных через преобразование точки обзора посредством модуля 41 преобразования точки обзора, чтобы обнаруживать краевой составляющий элемент (в дальнейшем в этом документе называемый краевым элементом (характерной точкой)) периодического стационарного объекта, включенного в изображение вида с высоты птичьего полета. Модуль 42a извлечения краевых элементов вычисляет яркостное различие между двумя пикселами рядом с каждой из нескольких позиций вдоль вертикальной виртуальной линии, идущей в вертикальном направлении в фактическом пространстве.
[0076] В частности, модуль 42a извлечения краевых элементов задает первую вертикальную виртуальную линию, соответствующую сегменту линии, идущему в вертикальном направлении в фактическом пространстве, и вторую вертикальную виртуальную линию, соответствующую сегменту линии, идущему в вертикальном направлении в фактическом пространстве, для изображения вида с высоты птичьего полета после преобразования точки обзора. Модуль 42a извлечения краевых элементов последовательно получает яркостные различия вдоль первой вертикальной виртуальной линии между точками на первой вертикальной виртуальной линии и точками на второй вертикальной виртуальной линии.
[0077] Модуль 42b вычисления формы сигнала распределения краев выполнен с возможностью суммировать число краевых элементов, извлеченных посредством модуля 42a извлечения краевых элементов, для каждой из нескольких вертикальных виртуальных линий и вычислять форму сигнала распределения краев на основе числа таких суммированных краевых элементов.
[0078] Подробнее описываются операции модуля 42a извлечения краевых элементов и модуля 42b вычисления формы сигнала распределения краев.
Как показано на Фиг.14, модуль 42a извлечения краевых элементов задает несколько первых вертикальных виртуальных линий Lai (в дальнейшем называемых предупреждающими линиями Lai), которые являются сегментами линии, идущими в вертикальном направлении из точек на реперной линии L1 контакта с землей в фактическом пространстве, и проходят через область A1 определения. Число предупреждающих линий Lai не ограничено конкретным образом. В нижеприведенном описании приводится описание случая, когда задаются n предупреждающих линий Lai (i=1-n).
[0079] Кроме того, модуль 42a извлечения краевых элементов задает несколько вторых вертикальных виртуальных линий Lri (в дальнейшем называемых опорными линиями Lri), которые надлежащим образом соответствуют нескольким предупреждающим линиям Lai, являются сегментами линии, идущими в вертикальном направлении из точек на реперной линии L1 контакта с землей в фактическом пространстве, и проходят через область A1 определения.. Каждая из опорных линий Lri задается равной позиции, отстоящей от предупреждающей линии Lai, соответствующей в фактическом пространстве, на предварительно определенное расстояние (например, 10 см). Следует отметить, что линии, соответствующие сегментам линии, идущим в вертикальном направлении в фактическом пространстве, становятся линиями, расходящимися радиально из позиции PS в камере 10 в изображении вида с высоты птичьего полета.
[0080] Затем модуль 42a извлечения краевых элементов задает несколько предупреждающих точек Paj на каждой из предупреждающих линий Lai. В примере, показанном на Фиг.14, задаются предупреждающие точки Pa1-Pa8, но число предупреждающих точек Paj не ограничено конкретным образом. В нижеприведенном описании приводится описание случая, когда задаются k предупреждающих точек Paj (j=1-k).
[0081] Дополнительно, модуль 42a извлечения краевых элементов задает несколько опорных точек Prj на каждой из опорных линий Lri, причем опорные точки Prj надлежащим образом соответствуют предупреждающим точкам Paj. Предупреждающие точки Paj и опорные точки Prj, соответствующие друг другу, задаются на практически идентичной высоте в фактическом пространстве. Следует отметить, что предупреждающие точки Paj и опорные точки Prj не обязательно всегда должны быть на идентичной высоте в строгом смысле. Очевидно, что некоторые разности высот допустимы при условии, что высоты предупреждающих точек Paj и опорных точек Prj могут рассматриваться как идентичные.
[0082] Модуль 42a извлечения краевых элементов последовательно получает яркостные различия вдоль каждой из предупреждающих линий Lai между предупреждающими точками Paj и опорными точками Prj, соответствующими друг другу. В примере, показанном на Фиг.14, модуль 42a извлечения краевых элементов вычисляет яркостное различие между первой предупреждающей точкой Pa1 и первыми опорными точками Pr1 и вычисляет яркостное различие между вторыми предупреждающими точками Pa2 и вторыми опорными точками Pr2. Затем, аналогично, модуль 42a извлечения краевых элементов последовательно получает яркостные различия между третьей-восьмой предупреждающими точками Pa3-Pa8 и третьей-восьмой опорными точками Pr3-Pr8.
[0083] Когда яркостное различие между предупреждающей точкой Paj и опорной точкой Prj равно или превышает предварительно определенное значение, модуль 42a извлечения краевых элементов определяет то, что краевой элемент присутствует между предупреждающей точкой Paj и опорной точкой Prj. Таким образом, модуль 42a извлечения краевых элементов выступает в качестве модуля извлечения характерных точек, выполненного с возможностью извлекать краевой элемент (характерную точку), присутствующий вдоль каждой из нескольких вертикальных виртуальных линий, идущих в вертикальном направлении в фактическом пространстве. Другими словами, модуль 42a извлечения краевых элементов извлекает характерную точку (краевой элемент) трехмерного объекта из данных изображений в предварительно определенной области (области определения) изображения вида с высоты птичьего полета для каждой из нескольких подобластей (каждой области рядом с несколькими вертикальными виртуальными линиями), включенных в предварительно определенную область.
[0084] Модуль 42b вычисления формы сигнала распределения краев подсчитывает, сколько краевых элементов, извлеченных посредством модуля 42a извлечения краевых элементов, присутствует вдоль одной предупреждающей линии Lai. Модуль 42b вычисления формы сигнала распределения краев сохраняет число таких подсчитанных краевых элементов в качестве атрибута каждой из предупреждающих линий Lai.
[0085] Модуль 42b вычисления формы сигнала распределения краев подсчитывает краевые элементы для всех предупреждающих линий Lai. Следует отметить, что длины фрагментов предупреждающих линий Lai, перекрывающихся с областью A1 определения, отличаются друг от друга в зависимости от того, где находится каждая из предупреждающих линий Lai. Число таких подсчитанных краевых элементов может быть нормализовано посредством деления числа на длину перекрывающегося фрагмента соответствующей предупреждающей линии Lai.
[0086] В примере, показанном на Фиг.14, другое транспортное средство VO отображается в области A1 определения. Предположим, что предупреждающая линия Lai задается на резиновом фрагменте шины другого транспортного средства VO, и что опорная линия Lri задается равной позиции на расстоянии приблизительно в 10 см от нее на колесе шины. В этом случае, поскольку первые предупреждающие точки Pa1 и первые опорные точки Pr1 находятся в идентичном фрагменте шины, яркостное различие между ними является небольшим. Между тем, вторая-восьмая предупреждающие точки Pa2-Pa8 находятся в резиновом фрагменте шины, и вторая-восьмая опорные точки Pr2-Pr8 находятся во фрагменте колеса шины, что делает яркостные различия между ними большими. Когда яркостные различия между второй-восьмой предупреждающими точками Pa2-Pa8 и второй-восьмой опорными точками Pr2-Pr8 равны или превышают предварительно определенное значение, модуль 42a извлечения краевых элементов обнаруживает то, что краевые элементы присутствуют между второй-восьмой предупреждающими точками Pa2-Pa8 и второй-восьмой опорными точками Pr2-Pr8. Дополнительно, поскольку число второй-восьмой предупреждающих точек Pa2-Pa8, присутствующих вдоль предупреждающей линии Lai, составляет 7, модуль 42a извлечения краевых элементов обнаруживает краевые элементы 7 раз. В этом случае, модуль 42b вычисления формы сигнала распределения краев подсчитывает значение краевого элемента как "7".
[0087] Дополнительно, модуль 42b вычисления формы сигнала распределения краев формирует график значения счетчика краевого элемента, полученного для каждой предупреждающей линии Lai, и получает форму сигнала распределения краев (данные формы сигнала). В частности, модуль 42b вычисления формы сигнала распределения краев иллюстрирует значение счетчика краевого элемента на плоскости, при этом вертикальная ось представляет значение счетчика краевого элемента, а горизонтальная ось представляет позицию предупреждающей линии Lai на реперной линии L1 контакта с землей в фактическом пространстве. В случае если предупреждающие линии La1-Lan задаются через равные интервалы на реперной линии L1 контакта с землей в фактическом пространстве, форма сигнала распределения краев может быть получена посредством простого совмещения значений счетчика краевых элементов, полученных для каждой предупреждающей линии Lai, в порядке предупреждающих линий La1-Lan. В примере, показанном на Фиг.14, предупреждающая линия Lai, заданная в резиновом фрагменте шины другого транспортного средства VO, имеет значение счетчика краевого элемента "7" в позиции, пересекающей реперную линию L1 контакта с землей в изображении вида с высоты птичьего полета.
[0088] Таким образом, модуль 42b вычисления формы сигнала распределения краев выступает в качестве модуля вычисления данных формы сигнала, выполненного с возможностью суммировать число краевых элементов, извлеченных посредством модуля 42a извлечения краевых элементов для каждой из нескольких вертикальных виртуальных линий, идущих в вертикальном направлении в фактическом пространстве, и вычислять форму сигнала распределения краев (данные формы сигнала) на основе числа таких суммированных краевых элементов. Другими словами, модуль 42b вычисления формы сигнала распределения краев вычисляет данные формы сигнала (на основе относительного взаимного расположения краевых элементов), соответствующие распределению характерных точек (краевых элементов) в предварительно определенной области (области определения) в изображении вида с высоты птичьего полета.
[0089] Счетный модуль 43 выполнен с возможностью обнаруживать пики формы сигнала распределения краев, вычисленной посредством модуля 42b вычисления формы сигнала распределения краев модуля 42 вычисления распределения краев. Пик является точкой в форме сигнала распределения краев, в которой значение счетчика краевого элемента изменяется с увеличивающегося на уменьшающееся. Счетный модуль 43 обнаруживает пики после того, как обработка уменьшения уровня шума выполняется для формы сигнала распределения краев, например, с помощью фильтра нижних частот, фильтра на основе скользящего среднего и т.п. Здесь, пик, который должен быть обнаружен, может быть только пиком, имеющим значение, равное или превышающее предварительно определенное пороговое значение. Предварительно определенное пороговое значение может задаваться равным, например, значению в 60% от максимального значения формы сигнала распределения краев.
[0090] Кроме того, счетный модуль 43 подсчитывает число пиков, совмещенных через равные интервалы, для пиков, обнаруженных таким образом (информации пиков). В частности, счетный модуль 43 вычисляет расстояния между пиками, обнаруженные таким образом, извлекает пики, имеющие вычисленное расстояние между пиками в предварительно определенном диапазоне, и подсчитывает число пиков. "Предварительно определенный диапазон" для расстояния между пиками может быть фиксированным значением, предварительно заданным согласно типу периодических стационарных объектов, которые должны быть обнаружены, или может быть значением переменной, заданным на основе расстояний между пиками, последовательно обнаруженных в течение предварительно определенного периода времени или более. Следует отметить, что при определении пиков из формы сигнала распределения краев счетный модуль 43 пропускает пик, обнаруженный в предыдущий раз, в некоторых случаях. В таком случае, интервал пиков обнаруживается как имеющий размер, в два, три или более раз превышающий размер фактического интервала. Следовательно, чтобы предотвращать неправильный подсчет пиков, совмещенных через равные интервалы, "предварительно определенный диапазон" задается таким образом, что он включает в себя значения, соответствующие кратным числам интервала пиков, которые должны быть извлечены в первую очередь. Например, когда интервал пиков, которые должны быть извлечены в первую очередь, составляет X, "предварительно определенный диапазон" для расстояния между пиками задается как X±10%, 2X±20%, 3X±30%. Таким образом, счетный модуль 43 выступает в качестве модуля обнаружения информации пиков, выполненного с возможностью обнаруживать информацию пиков данных формы сигнала.
[0091] Модуль 44 обнаружения вариантов периодических стационарных объектов выполнен с возможностью определять то, является или нет трехмерный объект, имеющий извлеченный краевой элемент, вариантом периодического стационарного объекта, на основе того, равно или превышает либо нет число пиков (информация пиков), подсчитанное посредством счетного модуля 43, предварительно определенное пороговое значение Th2. В частности, когда число пиков, подсчитанное посредством счетного модуля 43, равно или превышает предварительно определенное пороговое значение Th2, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются вариантами периодических стационарных объектов. Пороговое значение Th2 является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, таких как, например, опоры линии электропередач, дорожные указатели или телеграфные столбы, и может быть определено посредством экспериментов и т.п. В частности, пороговое значение Th2 задается равным, например, значению 3-100 (включительно).
[0092] Когда вариант периодического стационарного объекта непрерывно обнаруживается в течение предварительно определенного периода времени, модуль 45 оценки периодических стационарных объектов выполнен с возможностью определять то, что вариант периодического стационарного объекта является периодическим стационарным объектом. В частности, когда модуль 44 обнаружения вариантов периодических стационарных объектов непрерывно обнаруживает в течение предварительно определенного периода времени состояние, в котором число пиков равно или превышает предварительно определенное пороговое значение Th2, модуль 45 оценки периодических стационарных объектов оценивает то, что существует достаточно высокая вероятность того, что обнаруженный вариант периодического стационарного объекта является периодическим стационарным объектом. Затем модуль 45 оценки периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются периодическими стационарными объектами. "Предварительно определенный период времени" является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, и может быть получен посредством экспериментов и т.п. Значение может быть фиксированным значением или может варьироваться согласно интервалу захвата камеры 10 и скорости движения рассматриваемого транспортного средства V. В частности, "предварительно определенный период времени" задается равным, например, 0,1-5 секунд.
[0093] Далее описывается способ обнаружения периодических стационарных объектов согласно настоящему варианту осуществления. Фиг.15 и 16 являются блок-схемами последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно настоящему варианту осуществления. Следует отметить, что на Фиг.15 и 16 приводится описание обработки, направленной на область A1 определения для удобства, однако идентичная обработка может быть выполнена также для области A2 определения.
[0094] Как показано на Фиг.15, во-первых, на этапе S31, модуль 41 преобразования точки обзора принимает захваченные данные изображений в предварительно определенной области, полученной посредством захвата посредством камеры 10, и выполняет преобразование точки обзора для них, чтобы создавать данные изображений вида с высоты птичьего полета.
[0095] Затем, на этапе S32, модуль 42 вычисления распределения краев задает n предупреждающих линий Lai на области A1 определения и задает n опорных линий Lri, которые надлежащим образом соответствуют n предупреждающих линий Lai (i=1-n). Модуль 42 вычисления распределения краев задает сегменты линии, идущие в вертикальном направлении из точек на реперной линии L1 контакта с землей в фактическом пространстве, в качестве предупреждающих линий Lai. Кроме того, модуль 42 вычисления распределения краев задает сегменты линии, которые идут в вертикальном направлении из точек на реперной линии L1 контакта с землей в фактическом пространстве и отстоят от предупреждающих линий Lai, соответствующих в фактическом пространстве, на предварительно определенное расстояние, в качестве опорных линий Lri.
[0096] Затем, на этапе S33, модуль 42 вычисления распределения краев задает k предупреждающих точек Paj на каждой из предупреждающих линий Lai и задает k опорных точек Prj (j=1-k) на каждой из опорных линий Lri, причем k опорных точек Prj надлежащим образом соответствуют предупреждающим точкам Paj. Модуль 42 вычисления распределения краев выполняет настройки таким образом, что предупреждающие точки Paj и опорные точки Prj соответствуют друг другу практически на идентичной высоте в фактическом пространстве.
[0097] Затем, на этапе S34, модуль 42 вычисления распределения краев определяет то, равно или превышает либо нет яркостное различие между предупреждающей точкой Paj и опорной точкой Prj, соответствующими друг другу, предварительно определенное значение. При определении того, что яркостное различие равно или превышает предварительно определенное значение, модуль 42 вычисления распределения краев определяет то, что краевой элемент присутствует между предупреждающей точкой Paj и опорными точками Prj, определенными таким образом, и подставляет "1" для значения счетчика (bincount(i)) i-той предупреждающей линии Lai на этапе S35. На этапе S34, при определении того, что яркостное различие меньше предварительно определенного значения, модуль 42 вычисления распределения краев определяет то, что краевой элемент не присутствует между предупреждающей точкой Paj и опорной точкой Prj, определенными таким образом, и передает обработку на этап S36.
[0098] На этапе S36, модуль 42 вычисления распределения краев определяет то, выполнена или нет обработка на этапе S34 для всех предупреждающих точек Paj на предупреждающей линии Lai, обрабатываемой в данный момент. При определении того, что обработка на этапе S34 не выполнена для всех предупреждающих точек Paj, модуль 42 вычисления распределения краев возвращает обработку к этапу S34, получает яркостное различие между следующей предупреждающей точкой Paj+1 и опорной точкой Prj+1 и определяет то, равно или превышает либо нет яркостное различие предварительно определенное значение. Таким образом, модуль 42 вычисления распределения краев последовательно получает яркостные различия между предупреждающими точками Paj и опорными точками Prj вдоль предупреждающей линии Lai в последовательности. Когда полученное яркостное различие становится равным или превышающим предварительно определенное значение, модуль 42 вычисления распределения краев определяет то, что присутствует краевой элемент.
[0099] После подстановки "1" для значения счетчика (bincount(i)) i-той предупреждающей линии Lai на этапе S35 модуль 42 вычисления распределения краев передает обработку на этап S37. Затем модуль 42 вычисления распределения краев получает яркостное различие между следующей предупреждающей точкой Paj+1 и опорной точкой Prj+1 и определяет то, равно или превышает либо нет яркостное различие предварительно определенное значение. При определении того, что яркостное различие равно или превышает предварительно определенное значение, модуль 42 вычисления распределения краев определяет то, что краевой элемент присутствует между предупреждающей точкой Paj+1 и опорной точкой Prj+1, определенной таким образом, и увеличивает значение счетчика (bincount(i)) i-той предупреждающей линии Lai на этапе S38.
[0100] На этапе S37, при определении того, что яркостное различие меньше предварительно определенного значения, модуль 42 вычисления распределения краев определяет то, что краевой элемент не присутствует между предупреждающей точкой Paj+1 и опорными точками Prj+1, определенными таким образом, и передает обработку на этап S39, пропуская этап S38.
[0101] Затем, на этапе S39, модуль 42 вычисления распределения краев определяет то, выполнена или нет обработка на этапе S34 или S37 для всех предупреждающих точек Paj на предупреждающей линии Lai, обрабатываемой в данный момент. При определении того, что обработка не выполнена для всех предупреждающих точек Paj, модуль 42 вычисления распределения краев возвращает обработку к этапу S37, получает яркостное различие между следующей предупреждающей точкой Paj+1 и опорной точкой Prj+1 и определяет то, равно или превышает либо нет яркостное различие предварительно определенное значение. На этапе S39, при определении того, что обработка выполнена для всех предупреждающих точек Paj, модуль 42 вычисления распределения краев передает обработку на этап S41. Таким образом, модуль 42 вычисления распределения краев подсчитывает, сколько краевых элементов присутствует вдоль идентичной предупреждающей линии Lai, и сохраняет число таких подсчитанных краевых элементов в качестве атрибута (bincount(i)) предупреждающей линии Lai.
[0102] Следует отметить, что на этапе S36, при определении того, что обработка на этапе S34 выполнена для всех предупреждающих точек Paj, модуль 42 вычисления распределения краев определяет то, что краевой элемент не присутствует на предупреждающей линии Lai, обрабатываемой в данный момент. Затем модуль 42 вычисления распределения краев подставляет "0" для bincount(i) на этапе S40 и передает обработку на этап S41.
[0103] Затем, на этапе S41, модуль 42 вычисления распределения краев определяет то, выполнена или нет вышеуказанная обработка для всех n предупреждающих линий Lai. При определении того, что обработка не выполнена для всех предупреждающих линий Lai, модуль 42 вычисления распределения краев возвращает обработку к этапу S34 и выполняет обработку для следующей предупреждающей линии Lai+1. На этапе S41, при определении того, что обработка выполнена для всех предупреждающих линий Lai, модуль 42 вычисления распределения краев передает обработку на этап S42.
[0104] Затем, на этапе S42, модуль 42 вычисления распределения краев формирует график значения счетчика bincount(i) (i=1-n) краевого элемента, полученного для каждого из n предупреждающих линий Lai, и получает форму сигнала распределения краев. В частности, модуль 42 вычисления распределения краев иллюстрирует значение счетчика bincount(i) (i=1-n) краевого элемента на плоскости, при этом вертикальная ось представляет значение счетчика краевого элемента, а горизонтальная ось представляет позицию предупреждающей линии Lai на реперной линии L1 контакта с землей в фактическом пространстве.
[0105] Затем, на этапе S43, счетный модуль 43 обнаруживает пики формы сигнала распределения краев, вычисленной посредством модуля 42 вычисления распределения краев.
[0106] Затем, на этапе S44, счетный модуль 43 вычисляет расстояния между пиками, обнаруженные таким образом.
[0107] Затем, на этапе S45, счетный модуль 43 извлекает пики, имеющие вычисленное расстояние между пиками в предварительно определенном диапазоне, и подсчитывает число пиков.
[0108] Затем, на этапе S46, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, равно или превышает либо нет число пиков, подсчитанное посредством счетного модуля 43, предварительно определенное пороговое значение Th2. При определении того, что число пиков равно или превышает предварительно определенное пороговое значение Th2, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются вариантами периодических стационарных объектов, и передает обработку на этап S47.
[0109] На этапе S47, модуль 45 оценки периодических стационарных объектов оценивает то, обнаруживается либо нет последовательно состояние, в котором число пиков равно или превышает предварительно определенное пороговое значение Th2, предварительно определенное число раз или более. При оценке того, что состояние, в котором число пиков равно или превышает предварительно определенное пороговое значение Th2, последовательно обнаруживается предварительно определенное число раз или более, модуль 45 оценки периодических стационарных объектов оценивает то, что объекты, соответствующие подсчитанным пикам, являются периодическими стационарными объектами, и подставляет "1" для флага f_shuki на этапе S48. Между тем, на этапе S47, при оценке того, что состояние, в котором число пиков равно или превышает предварительно определенное пороговое значение Th2, не обнаруживается последовательно предварительно определенное число раз или более, модуль 45 оценки периодических стационарных объектов пропускает этап S48 и поддерживает значение флага f_shuki. После этого завершаются обработки на Фиг.15 и 16.
[0110] На этапе S46, при определении того, что число пиков меньше предварительно определенного порогового значения Th2, модуль 44 обнаружения вариантов периодических стационарных объектов передает обработку на этап S49.
[0111] На этапе S49, модуль 45 оценки периодических стационарных объектов оценивает то, обнаруживается либо нет последовательно состояние, в котором число пиков меньше предварительно определенного порогового значения Th2, предварительно определенное число раз или более. При оценке того, что состояние, в котором число пиков меньше предварительно определенного порогового значения Th2, последовательно обнаруживается предварительно определенное число раз или более, модуль 45 оценки периодических стационарных объектов оценивает то, что объекты, соответствующие подсчитанным пикам, не являются периодическими стационарными объектами, и подставляет "0" для флага f_shuki на этапе S50. Между тем, на этапе S49, при оценке того, что состояние, в котором число пиков меньше предварительно определенного порогового значения Th2, не обнаруживается последовательно предварительно определенное число раз или более, модуль 45 оценки периодических стационарных объектов пропускает этап S50 и поддерживает значение флага f_shuki. После этого завершаются обработки на Фиг.15 и 16.
[0112] В системе 2 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления краевой элемент (характерная точка) трехмерного объекта извлекается из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из областей (подобластей) рядом с несколькими вертикальными виртуальными линиями, включенных в предварительно определенную область; вычисляется форма сигнала распределения краев (данные формы сигнала), соответствующая распределению краевых элементов в предварительно определенной области; и то, является или нет трехмерный объект, имеющий извлеченный краевой элемент, вариантом периодического стационарного объекта, определяется на основе того, равно или превышает либо нет число пиков (информация пиков) формы сигнала распределения краев предварительно определенное пороговое значение. Аналогично первому варианту осуществления, это обеспечивает более четкое извлечение периодичности (повторяемости) периодических стационарных объектов в качестве информации пиков данных формы сигнала, и варианты периодических стационарных объектов могут проще извлекаться из трехмерных объектов, включенных в захваченное изображение. В силу этого, возможно более точное извлечение периодических стационарных объектов.
[0113] Кроме того, в системе 2 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления суммируется число краевых элементов, присутствующих вдоль каждой из нескольких вертикальных виртуальных линий, идущих в вертикальном направлении в фактическом пространстве, и получается форма сигнала распределения краев на основе числа таких суммированных краевых элементов. Помимо этого, когда число пиков формы сигнала распределения краев равно или превышает предварительно определенное пороговое значение Th2, определяется то, что трехмерный объект, имеющий извлеченный краевой элемент, является вариантом периодического стационарного объекта. Следовательно, надежно обнаруживается случай, в котором края, идущие в вертикальном направлении, очень плотно совмещены без определения того, что определенные трехмерные объекты являются стационарными объектами или движущимися объектами. Таким образом, появляется возможность проще обнаруживать варианты периодических стационарных объектов, которые с большей вероятностью являются периодическими стационарными объектами.
[0114] В частности, в системе 2 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, число пиков, совмещенных через равные интервалы, подсчитывается для пиков формы сигнала распределения краев. Следовательно, можно еще более надежно обнаруживать варианты периодических стационарных объектов, которые имеют края, идущие в вертикальном направлении и совмещенные с высокой плотностью через равные интервалы, и с большей вероятностью являются периодическими стационарными объектами.
[0115] Дополнительно, в системе 2 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, когда вариант периодического стационарного объекта непрерывно обнаруживается в течение предварительно определенного периода времени, определяется то, что вариант периодического стационарного объекта является периодическим стационарным объектом. Следовательно, предотвращается ошибочное определение вследствие шума, и могут быть более надежно обнаружены периодические стационарные объекты.
[0116] Третий вариант осуществления
В дальнейшем в этом документе на основе чертежей описывается третий вариант осуществления настоящего изобретения. Следует отметить, что то, что эквивалентно тому, что описано в первом и втором вариантах осуществления, обозначается посредством идентичных ссылок с номерами, и описание означенного опускается.
[0117] Система 3 обнаружения периодических стационарных объектов согласно настоящему варианту осуществления имеет схематичную конфигурацию, идентичную схематичной конфигурации системы 1 обнаружения периодических стационарных объектов, показанной на Фиг.1, но включает в себя модуль 40' вычисления вместо модуля 30 вычисления. В частности, система 3 обнаружения периодических стационарных объектов согласно настоящему варианту осуществления включает в себя камеру 10, датчик 20 скорости транспортного средства и модуль 40' вычисления.
[0118] Фиг.17 является блок-схемой для иллюстрации подробностей модуля 40' вычисления согласно настоящему варианту осуществления. Как показано на Фиг.17, модуль 40' вычисления включает в себя модуль 41 преобразования точки обзора, модуль 42 вычисления распределения краев, счетный модуль 43', модуль 44 обнаружения вариантов периодических стационарных объектов, модуль 51 совмещения, модуль 52 вычисления разности и модуль 53 оценки периодических стационарных объектов. Следует отметить, что модуль 40' вычисления является компьютером, состоящим из CPU, RAM, ROM и т.д. Модуль 40' вычисления выполняет обработку изображений и т.п. согласно программе, заданной заранее, чтобы тем самым реализовывать функцию каждого модуля, такого как модуль 41 преобразования точки обзора, модуль 42 вычисления распределения краев, счетный модуль 43', модуль 44 обнаружения вариантов периодических стационарных объектов, модуль 51 совмещения, модуль 52 вычисления разности и модуль 53 оценки периодических стационарных объектов.
[0119] Счетный модуль 43' согласно настоящему варианту осуществления выполнен с возможностью обнаруживать пики формы сигнала распределения краев, вычисленной посредством модуля 42 вычисления распределения краев, и подсчитывать число пиков. Счетный модуль 43' отличается от счетного модуля 43 согласно второму варианту осуществления тем, что счетный модуль 43' подсчитывает число пиков без исключения пиков, имеющих расстояние между пиками за пределами предварительно определенного диапазона.
[0120] Модуль 44 обнаружения вариантов периодических стационарных объектов выполнен с возможностью определять то, являются или нет объекты, соответствующие пикам, вариантами периодических стационарных объектов, на основе того, равно или превышает либо нет число пиков (информация пиков), подсчитанное посредством счетного модуля 43', предварительно определенное пороговое значение Th3. В частности, когда число пиков, подсчитанное посредством счетного модуля 43', равно или превышает предварительно определенное пороговое значение Th3, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, что объекты, соответствующие пикам, являются вариантами периодических стационарных объектов. Пороговое значение Th3 является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, таких как, например, опоры линии электропередач, дорожные указатели или телеграфные столбы, и может быть получено посредством экспериментов и т.п. В частности, пороговое значение Th3 задается равным, например, значению 3-100 (включительно).
[0121] Фиг.18 показывает графики для иллюстрации подробных операций модуля 51 совмещения. Модуль 51 совмещения выполнен с возможностью последовательно принимать формы сигнала распределения краев, вычисленные посредством модуля 42 вычисления распределения краев, и совмещать позиции принимаемых форм сигнала распределения краев в различные моменты времени на основе скорости движения рассматриваемого транспортного средства V, определенной посредством датчика 20 скорости транспортного средства. Например, допустим, что модуль 51 совмещения принимает форму Et-Δt сигнала распределения краев, вычисленную посредством модуля 42 вычисления распределения краев во время t-Δt (второе время), и форму Et сигнала распределения краев, вычисленную во время t (первое время). Кроме того, допустим, что по мере того, как рассматриваемое транспортное средство V движется в течение одного временного сегмента (Δt), форма сигнала распределения краев перемещается на δ относительно системы координат. В этом случае, модуль 51 совмещения сдвигает форму Et сигнала распределения краев посредством δ вдоль горизонтальной оси, как показано на Фиг.18, чтобы тем самым согласовывать позицию формы Et сигнала распределения краев с позицией формы Et-Δt сигнала распределения краев. Таким образом, модуль 51 совмещения получает форму Et' сигнала распределения краев. Здесь, совмещение позиций форм сигнала распределения краев означает, что когда предупреждающая линия Lai, соответствующая точке (например, G1) в одной форме сигнала распределения краев, и предупреждающая линия Lai, соответствующая точке (например, G2) в другой форме сигнала распределения краев, присутствуют в идентичной или приблизительно идентичной позиции в фактическом пространстве, форма(ы) сигнала распределения краев перемещается параллельно таким образом, что значения горизонтальных координат точки G1 и точки G2 совпадают друг с другом. В этой связи, продолжительность одного временного сегмента (Δt) может составлять, например, предварительно определенный период времени, такой как один цикл управления, и может быть произвольным периодом времени.
[0122] Фиг.19 показывает графики для иллюстрации подробных операций модуля 52 вычисления разности. Модуль 52 вычисления разности выполнен с возможностью принимать форму Et-Δt сигнала распределения краев и форму Et' сигнала распределения краев, вычисленные посредством модуля 51 совмещения, и вычислять распределение абсолютных значений разности между ними |Et-Δt-Et'|. Когда форма сигнала распределения краев извлекается из периодического стационарного объекта, форма Et-Δt сигнала распределения краев оптимально совпадает с формой Et' сигнала распределения краев. Соответственно, абсолютные значения разности |Et-Δt-Et'|, в целом, являются небольшими значениями, как показано на Фиг.19(a). Между тем, когда форма сигнала распределения краев извлекается из движущихся объектов, форма Et-Δt сигнала распределения краев не совпадает с формой Et' сигнала распределения краев, и абсолютные значения разности |Et-Δt-Et'| значительно изменяются по сравнению с Фиг.19(a), как показано на Фиг.19(b).
[0123] Модуль 53 оценки периодических стационарных объектов выполнен с возможностью интегрировать абсолютные значения |Et-Δt-Et'|, вычисленные посредством модуля 52 вычисления разности, чтобы вычислять их интегрированное значение ID1 (первое интегрированное значение) и вычислять интегрированное значение I1 (второе интегрированное значение) формы Et' сигнала распределения краев. Дополнительно, модуль 53 оценки периодических стационарных объектов выполнен с возможностью вычислять отношение интегрированного значения ID1 к интегрированному значению I1 (ID1/I1) и определять то, является или нет вариант периодического стационарного объекта, обнаруженный посредством модуля 44 обнаружения вариантов периодических стационарных объектов, стационарным (стационарность), на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th4. Пороговое значение Th4 является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, таких как, например, опоры линии электропередач, дорожные указатели или телеграфные столбы, и может быть получено посредством экспериментов и т.п. Когда отношение интегрированного значения ID1 к интегрированному значению I1 (ID1/I1) меньше предварительно определенного порогового значения Th4, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является стационарным.
[0124] Когда стационарный вариант периодического стационарного объекта непрерывно обнаруживается в течение предварительно определенного периода времени, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является периодическим стационарным объектом. В частности, когда состояние, в котором отношение ID1/I1 меньше предварительно определенного порогового значения Th4, непрерывно обнаруживается в течение предварительно определенного периода времени, модуль 53 оценки периодических стационарных объектов определяет то, что существует достаточно высокая вероятность того, что обнаруженный вариант периодического стационарного объекта является периодическим стационарным объектом. Затем модуль 53 оценки периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются периодическими стационарными объектами. "Предварительно определенный период времени" является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, и может быть получен посредством экспериментов и т.п. Значение может быть фиксированным значением или может варьироваться согласно интервалу захвата камеры 10 и скорости движения рассматриваемого транспортного средства V. В частности, "предварительно определенный период времени" задается равным, например, 0,1-5 секунд. Этот период времени может обеспечивать надежность определения того, что варианты периодических стационарных объектов являются периодическими стационарными объектами, и меньше среднего интервала, в котором возникает ошибка при измерении скорости движения рассматриваемого транспортного средства V и т.п.
[0125] Затем описывается способ обнаружения периодических стационарных объектов согласно настоящему варианту осуществления. Фиг.20 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, соответствующей Фиг.16 из второго варианта осуществления. Следует отметить, что поскольку обработка этапов S31-S41 способа обнаружения периодических стационарных объектов согласно настоящему варианту осуществления является идентичной обработке этапов S31-S41 второго варианта осуществления, их иллюстрация и описание опускается. Помимо этого в дальнейшем в этом документе приводится описание обработки, направленной на область A1 определения для удобства; однако идентичная обработка может быть выполнена также для области A2 определения.
[0126] Как показано на Фиг.20, на этапе S51, выполняющемся после этапа S41 (см. Фиг.15), модуль 42 вычисления распределения краев формирует график значения счетчика bincount(i) (i=1-n) краевого элемента, полученного для каждого из n предупреждающих линий Lai, и получает форму сигнала распределения краев. В частности, модуль 42 вычисления распределения краев иллюстрирует значение счетчика bincount(i) (i=1-n) краевого элемента на плоскости, при этом вертикальная ось представляет значение счетчика краевого элемента, а горизонтальная ось представляет позицию предупреждающей линии Lai на реперной линии L1 контакта с землей в фактическом пространстве.
[0127] Затем, на этапе S52, счетный модуль 43' обнаруживает пики формы сигнала распределения краев, вычисленной посредством модуля 42 вычисления распределения краев, и подсчитывает число пиков.
[0128] Затем, на этапе S53, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, равно или превышает либо нет число пиков, подсчитанное посредством счетного модуля 43', предварительно определенное пороговое значение Th3. При определении того, что число пиков равно или превышает предварительно определенное пороговое значение Th3, модуль 44 обнаружения вариантов периодических стационарных объектов определяет то, что объекты, соответствующие пикам, являются вариантами периодических стационарных объектов, и передает обработку на этап S54. На этапе S53, при определении того, что число пиков, подсчитанное посредством счетного модуля 43', меньше предварительно определенного порогового значения Th3, завершается обработка на Фиг.20.
[0129] Затем, на этапе S54, модуль 51 совмещения совмещает позиции форм сигнала распределения краев в различные моменты времени, принимаемых из модуля 42 вычисления распределения краев, на основе скорости движения рассматриваемого транспортного средства V, определенной посредством датчика 20 скорости транспортного средства. В частности, когда форма сигнала распределения краев перемещается на δ относительно системы координат графика по мере того, как рассматриваемое транспортное средство V движется в течение одного временного сегмента (Δt), модуль 51 совмещения сдвигает форму Et сигнала распределения краев посредством δ вдоль горизонтальной оси и получает форму Et' сигнала распределения краев.
[0130] Затем, на этапе S55, модуль 52 вычисления разности вычисляет распределение абсолютных значений разности |Et-Δt-Et'| между формой Et-Δt сигнала распределения краев и формой Et' сигнала распределения краев, вычисленной посредством модуля 51 совмещения.
[0131] Затем модуль 53 оценки периодических стационарных объектов вычисляет интегрированное значение I1 формы Et' сигнала распределения краев на этапе S56 и вычисляет интегрированное значение ID1 абсолютных значений |Et-Δt-Et'| на следующем этапе S57.
[0132] Затем, на этапе S58, модуль 53 оценки периодических стационарных объектов вычисляет отношение (ID1/I1) интегрированного значения ID1 к интегрированному значению I1 и определяет то, является или нет вариант периодического стационарного объекта, обнаруженный посредством модуля 44 обнаружения вариантов периодических стационарных объектов, стационарным, на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th4. При определении того, что отношение ID1/I1 меньше предварительно определенного порогового значения Th4, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является стационарным, и передает обработку на этап S59.
[0133] На этапе S59 модуль 53 оценки периодических стационарных объектов определяет то, обнаруживается либо нет последовательно состояние, в котором отношение ID1/I1 меньше предварительно определенного порогового значения Th4, предварительно определенное число раз или более, другими словами, определяется или нет состояние непрерывно в течение предварительно определенного периода времени. При определении того, что состояние, в котором отношение ID1/I1 меньше предварительно определенного порогового значения Th4, последовательно обнаруживается предварительно определенное число раз или более, модуль 53 оценки периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются периодическими стационарными объектами, и подставляет "1" для флага f_shuki на этапе S60. Между тем, на этапе S59, при определении того, что состояние, в котором отношение ID1/I1 меньше предварительно определенного порогового значения Th4, не обнаруживается последовательно предварительно определенное число раз или более, модуль 53 оценки периодических стационарных объектов пропускает этап S60 и поддерживает значение флага f_shuki. После этого завершается обработка на Фиг.20.
[0134] На этапе S58, при определении того, что отношение ID1/I1 равно или превышает предварительно определенное пороговое значение Th4, модуль 53 оценки периодических стационарных объектов передает обработку на этап S61.
[0135] На этапе S61 модуль 53 оценки периодических стационарных объектов определяет то, обнаруживается либо нет последовательно состояние, в котором отношение ID1/I1 равно или превышает предварительно определенное пороговое значение Th4, предварительно определенное число раз или более. При определении того, что состояние, в котором отношение ID1/I1 равно или превышает предварительно определенное пороговое значение Th4, последовательно обнаруживается предварительно определенное число раз или более, модуль 53 оценки периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, не являются периодическими стационарными объектами, и подставляет "0" для флага f_shuki на этапе S62. Между тем, на этапе S61, при определении того, что состояние, в котором отношение ID1/I1 равно или превышает предварительно определенное пороговое значение Th4, не обнаруживается последовательно предварительно определенное число раз или более, модуль 53 оценки периодических стационарных объектов пропускает этап S62 и поддерживает значение флага f_shuki. После этого завершается обработка на Фиг.20.
[0136] В системе 3 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления краевой элемент (характерная точка) трехмерного объекта извлекается из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из областей (подобластей) рядом с несколькими вертикальными виртуальными линиями, включенных в предварительно определенную область; вычисляется форма сигнала распределения краев (данные формы сигнала), соответствующая распределению краевых элементов в предварительно определенной области; и то, является или нет трехмерный объект, имеющий извлеченный краевой элемент, вариантом периодического стационарного объекта, определяется на основе того, равно или превышает либо нет число пиков (информация пиков) формы сигнала распределения краев предварительно определенное пороговое значение. Аналогично первому варианту осуществления и второму варианту осуществления, это обеспечивает более четкое извлечение периодичности (повторяемости) периодических стационарных объектов в качестве информации пиков данных формы сигнала, и варианты периодических стационарных объектов могут проще извлекаться из трехмерных объектов, включенных в захваченное изображение. В силу этого, возможно более точное извлечение периодических стационарных объектов.
[0137] Кроме того, в системе 3 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, аналогично второму варианту осуществления, суммируется число краевых элементов, присутствующих вдоль каждой из нескольких вертикальных виртуальных линий, идущих в вертикальном направлении в фактическом пространстве, и получается форма сигнала распределения краев на основе числа таких суммированных краевых элементов. Кроме того, когда число пиков формы сигнала распределения краев равно или превышает предварительно определенное пороговое значение Th3, определяется то, что трехмерный объект, имеющий извлеченный краевой элемент, является вариантом периодического стационарного объекта. Следовательно, аналогично второму варианту осуществления, надежно обнаруживается случай, в котором края, идущие в вертикальном направлении, очень плотно совмещены без определения того, что определенные трехмерные объекты являются стационарными объектами или движущимися объектами. Таким образом, появляется возможность проще обнаруживать варианты периодических стационарных объектов, которые с большей вероятностью являются периодическими стационарными объектами.
[0138] Дополнительно, в системе 3 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления позиция формы Et сигнала распределения краев во время t совмещается с позицией формы Et-Δt сигнала распределения краев во время t-Δt на основе скорости движения движущегося объекта, и вычисляется разностная форма сигнала распределения |Et-Δt-Et'| между формой Et-Δt сигнала распределения краев во время t-Δt и такой совмещенной формой Et' сигнала распределения краев. Затем интегрируется эта разностная форма сигнала распределения |Et-Δt-Et'|, чтобы вычислять интегрированное значение ID1, и интегрируется совмещенная форма Et' сигнала распределения краев, чтобы вычислять интегрированное значение I1. Вычисляется отношение интегрированного значения ID1 к интегрированному значению I1 (ID1/I1), и то, является или нет вариант периодического стационарного объекта стационарным, определяется на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th4. Следовательно, можно обнаруживать стационарные варианты периодических стационарных объектов, которые с большей вероятностью являются периодическими стационарными объектами, и периодические стационарные объекты могут обнаруживаться еще проще и надежнее.
[0139] Кроме того, в системе 3 обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему варианту осуществления, когда в течение предварительно определенного периода времени непрерывно обнаруживается то, что вариант периодического стационарного объекта является стационарным, определяется то, что вариант периодического стационарного объекта является периодическим стационарным объектом. Следовательно, предотвращается ошибочное определение вследствие шума, и могут быть более надежно обнаружены периодические стационарные объекты.
[0140] Модифицированный пример
В вышеприведенном третьем варианте осуществления вычисляется отношение интегрированного значения ID1 к интегрированному значению I1 (ID1/I1), и то, является или нет вариант периодического стационарного объекта стационарным, определяется на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th4. Однако способ определения не ограничен этим.
[0141] В этом модифицированном примере модуль 52 вычисления разности выполнен с возможностью вычислять распределение абсолютных значений разности (первой разности) |Et-Δt-Et'| между формой Et' сигнала распределения краев и формой Et-Δt сигнала распределения краев и вычислять распределение абсолютных значений разности (второй разности) |Et-Δt-Et| между формой Et сигнала распределения краев и формой Et-Δt сигнала распределения краев.
[0142] Кроме того, модуль 53 оценки периодических стационарных объектов выполнен с возможностью интегрировать абсолютные значения |Et-Δt-Et'|, вычисленные посредством модуля 52 вычисления разности, чтобы вычислять их интегрированное значение ID1 (первое интегрированное значение), и интегрировать абсолютные значения |Et-Δt-Et|, чтобы вычислять их интегрированное значение ID2 (второе интегрированное значение).
[0143] Дополнительно, модуль 53 оценки периодических стационарных объектов выполнен с возможностью вычислять отношение интегрированного значения ID1 к интегрированному значению ID2 (ID1/ID2) и определять то, является или нет вариант периодического стационарного объекта, обнаруженный посредством модуля 44 обнаружения вариантов периодических стационарных объектов, стационарным, на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th5. Пороговое значение Th5 является значением, определенным согласно типу периодических стационарных объектов, которые должны быть обнаружены, таких как, например, опоры линии электропередач, дорожные указатели или телеграфные столбы, и может быть получено посредством экспериментов и т.п. Когда отношение интегрированного значения ID1 к интегрированному значению ID2 (ID1/ID2) меньше предварительно определенного порогового значения Th5, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является стационарным.
[0144] Когда стационарный вариант периодического стационарного объекта непрерывно обнаруживается в течение предварительно определенного периода времени, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является периодическим стационарным объектом. В частности, когда состояние, в котором отношение ID1/ID2 меньше предварительно определенного порогового значения Th4, непрерывно обнаруживается в течение предварительно определенного периода времени, модуль 53 оценки периодических стационарных объектов определяет то, что существует достаточно высокая вероятность того, что обнаруженный вариант периодического стационарного объекта является периодическим стационарным объектом. Затем модуль 53 оценки периодических стационарных объектов определяет то, что объекты, соответствующие подсчитанным пикам, являются периодическими стационарными объектами.
[0145] Далее описывается способ обнаружения периодических стационарных объектов согласно этому модифицированному примеру. Фиг.21 является блок-схемой последовательности операций способа для иллюстрации подробностей способа обнаружения периодических стационарных объектов согласно этому модифицированному примеру, соответствующей Фиг.16 и 20. Следует отметить, что поскольку обработка этапов S31-S41 способа обнаружения периодических стационарных объектов согласно этому модифицированному примеру является идентичной обработке этапов S31-S41 вышеописанного варианта осуществления, их иллюстрация и описание опускается. Помимо этого в способе обнаружения периодических стационарных объектов согласно этому модифицированному примеру обработка, эквивалентная обработке, описанной во втором и третьем вариантах осуществления, обозначается посредством идентичных ссылок с номерами, и ее описание опускается.
[0146] В этом модифицированном примере, как показано на Фиг.21, на этапе S55', выполняющемся после этапа S55, модуль 53 оценки периодических стационарных объектов вычисляет распределение абсолютных значений разности |Et-Δt-Et| между формой Et-Δt сигнала распределения краев и формой Et сигнала распределения краев, вычисленной посредством модуля 51 совмещения.
[0147] Затем модуль 53 оценки периодических стационарных объектов вычисляет интегрированное значение ID1 абсолютных значений |Et-Δt-Et'| на этапе S57 и вычисляет интегрированное значение ID2 абсолютных значений |Et-Δt-Et| на последующем этапе S57'.
[0148] Затем на этапе S58', модуль 53 оценки периодических стационарных объектов вычисляет отношение интегрированного значения ID1 к интегрированному значению ID2 (ID1/ID2) и определяет то, является или нет вариант периодического стационарного объекта, обнаруженный посредством модуля 44 обнаружения вариантов периодических стационарных объектов, стационарным, на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th5. При определении того, что отношение ID1/ID2 меньше предварительно определенного порогового значения Th5, модуль 53 оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является стационарным, и передает обработку на этап S59. Между тем, на этапе S58, при определении того, что ID1/ID2 равен или превышает предварительно определенное пороговое значение Th5, модуль 53 оценки периодических стационарных объектов передает обработку на этап S61.
[0149] Обработка после этапа S59 и обработка после этапа S61 являются идентичными обработкам в третьем варианте осуществления, и их описание опускается.
[0150] В этом модифицированном примере вычисляются первая разностная форма сигнала распределения |Et-Δt-Et'| между формой Et-Δt сигнала распределения краев во время t-Δt и такой совмещенной формой Et' сигнала распределения краев и вторая разностная форма сигнала распределения |Et-Δt-Et| между формой Et сигнала распределения краев во время t и формой Et-Δt сигнала распределения краев во время t-Δt. Затем интегрируется первая разностная форма сигнала распределения |Et-Δt-Et'|, чтобы вычислять интегрированное значение ID1, и интегрируется вторая разностная форма сигнала распределения |Et-Δt-Et|, чтобы вычислять интегрированное значение ID2. Вычисляется отношение интегрированного значения ID1 к интегрированному значению ID2 (ID1/ID2) и то, является или нет вариант периодического стационарного объекта стационарным, определяется на основе того, меньше или нет значение отношения предварительно определенного порогового значения Th5. Поскольку знаменатель отношения является интегрированным значением ID2 разности между формой Et сигнала распределения краев во время t и формой Et-Δt сигнала распределения краев во время t-Δt, это делает более значительной разность между значением отношения, полученным, когда формы Et, Et-Δt сигнала распределения краев извлекаются из движущихся объектов, и значением отношения, полученным при извлечении из периодических стационарных объектов, и могут быть более надежно обнаружены стационарные варианты периодических стационарных объектов.
[0151] Следует отметить, что в третьем варианте осуществления и модифицированном примере то, что сравнивается с предварительно определенными пороговыми значениями при определении того, является или нет вариант периодического стационарного объекта стационарным, не ограничено отношением ID1/I1 и отношением ID1/ID2. Отношение может быть, например, отношением интегрированного значения ID1 к интегрированному значению I2 формы Et сигнала распределения краев (ID1/I2) или отношением интегрированного значения ID1 к интегрированному значению I3 формы Et-Δt сигнала распределения краев, вычисленным во время t-Δt (ID1/I3).
[0152] Кроме того, все интегрированные значения I1, I2, I3, ID1, ID2, составляющие знаменатели и числители вышеуказанных отношений, получаются посредством интегрирования форм сигнала распределения краев или их абсолютных значений разности, но могут быть значениями, полученными посредством интегрирования формы сигнала, которая следует из возведения в квадрат значения форм сигнала распределения краев или их разности.
[0153] Выше описаны варианты осуществления настоящего изобретения. Тем не менее эти варианты осуществления являются просто примерами, описанными для того, чтобы упрощать понимание настоящего изобретения, и настоящее изобретение не ограничено вариантами осуществления. Объем настоящего изобретения включает в себя не только конкретные технические вопросы, раскрытые в вышеописанных вариантах осуществления, но также и различные модификации, варьирования, альтернативные технологии и т.п., которые могут быть легко разработаны из них.
[0154] Например, в вышеописанных вариантах осуществления, скорость транспортного средства рассматриваемого транспортного средства V определяется на основе сигнала из датчика 20 скорости транспортного средства. Однако, без ограничения этим, скорость может быть оценена из нескольких изображений в различные моменты времени. В этом случае, больше не требуется датчик скорости транспортного средства, и может быть упрощена конфигурация.
[0155] Данная заявка притязает на приоритет заявки на патент (Япония) № 2011-034097, поданной 21 февраля 2011 года, все содержимое которой содержится в данном документе по ссылке.
Промышленная применимость
[0156] В системе обнаружения периодических стационарных объектов и способе обнаружения периодических стационарных объектов согласно настоящему изобретению, характерная точка трехмерного объекта извлекается из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета, соответственно, для нескольких подобластей, включенных в предварительно определенную область; вычисляются данные формы сигнала, соответствующие распределению характерной точки в предварительно определенной области для изображения вида с высоты птичьего полета; и то, является или нет трехмерный объект, имеющий извлеченную характерную точку, вариантом периодического стационарного объекта, определяется на основе того, равна или превышает либо нет информация пиков данных формы сигнала предварительно определенное пороговое значение. Это обеспечивает более четкое извлечение периодичности (повторяемости) периодических стационарных объектов в качестве информации пиков данных формы сигнала, и варианты периодических стационарных объектов могут проще извлекаться из трехмерных объектов, включенных в захваченное изображение. В силу этого, возможно более точное извлечение периодических стационарных объектов.
Список номеров ссылок
[0157] 1, 2, 3 - система обнаружения периодических стационарных объектов
10 - камера (устройство захвата изображений)
20 - датчик скорости транспортного средства (детектор скорости)
30, 40 - модуль вычисления
31, 41 - модуль преобразования точки обзора
32, 51 - модуль совмещения
33 - модуль обнаружения трехмерных объектов
34 - модуль вычисления вариантов величины перемещения
35, 43 - счетный модуль
36 - модуль вычисления диапазона перемещения
37, 45, 53 - модуль оценки периодических стационарных объектов
37a - модуль обнаружения вариантов периодических стационарных объектов
37b - модуль определения периодичности
38 - модуль обнаружения смены полосы движения (модуль обнаружения поперечного движения)
42 - модуль вычисления распределения краев
44 - модуль обнаружения вариантов периодических стационарных объектов
52 - модуль вычисления разности
a - угол обзора
PBt - изображение вида с высоты птичьего полета
PDt - разностное изображение
V - рассматриваемое транспортное средство
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2619724C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2619059C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2576315C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2636120C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2635280C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ И СПОСОБ ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2570892C9 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2012 |
|
RU2544775C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2571367C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2636121C2 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ТРЕХМЕРНЫХ ОБЪЕКТОВ | 2013 |
|
RU2629433C2 |
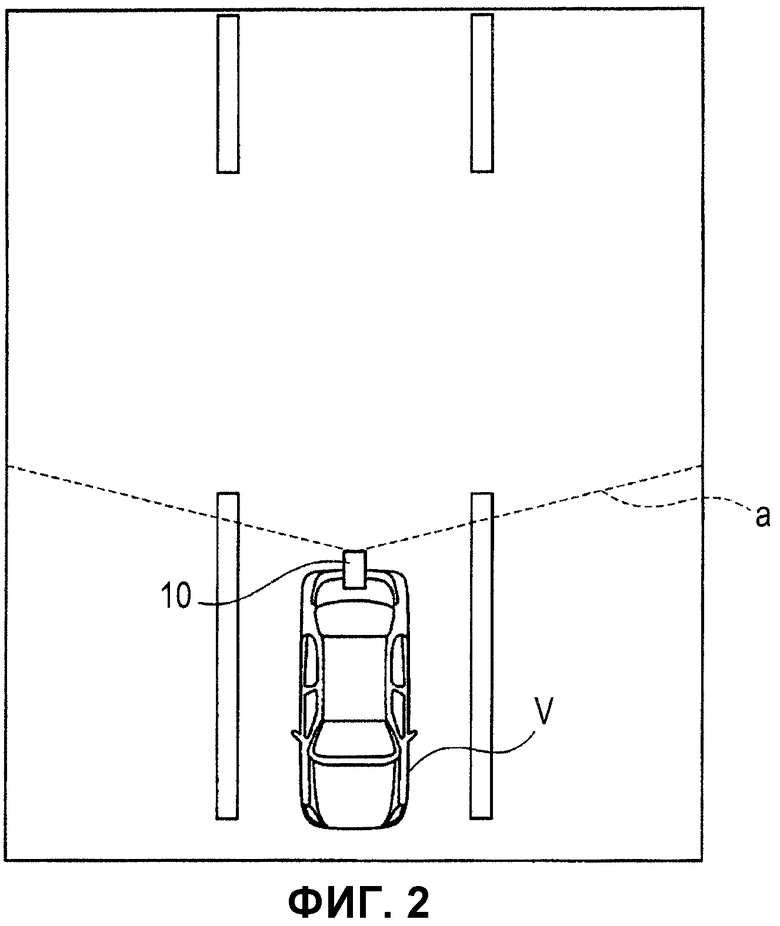
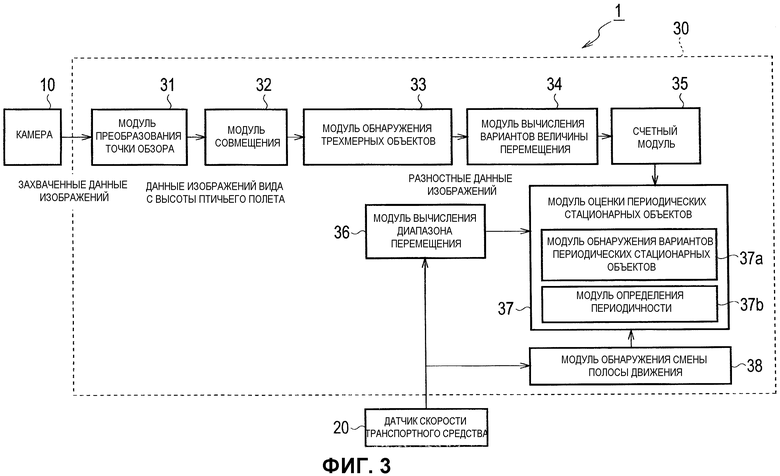
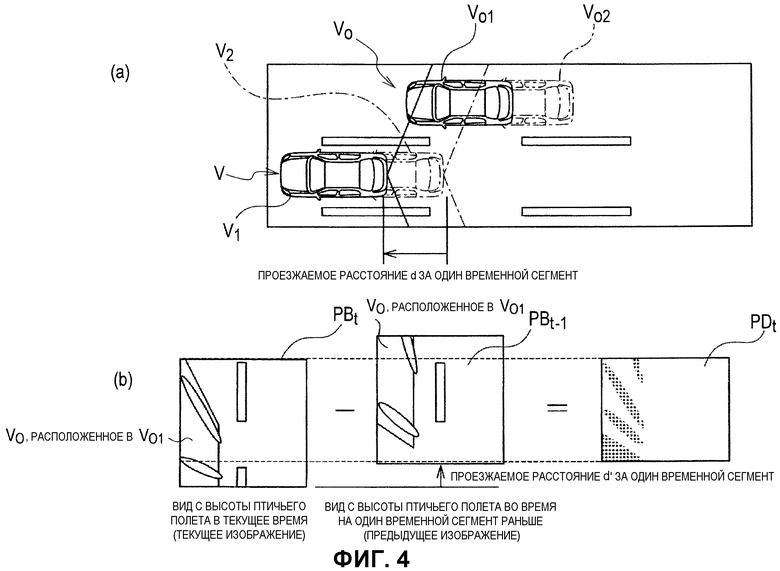
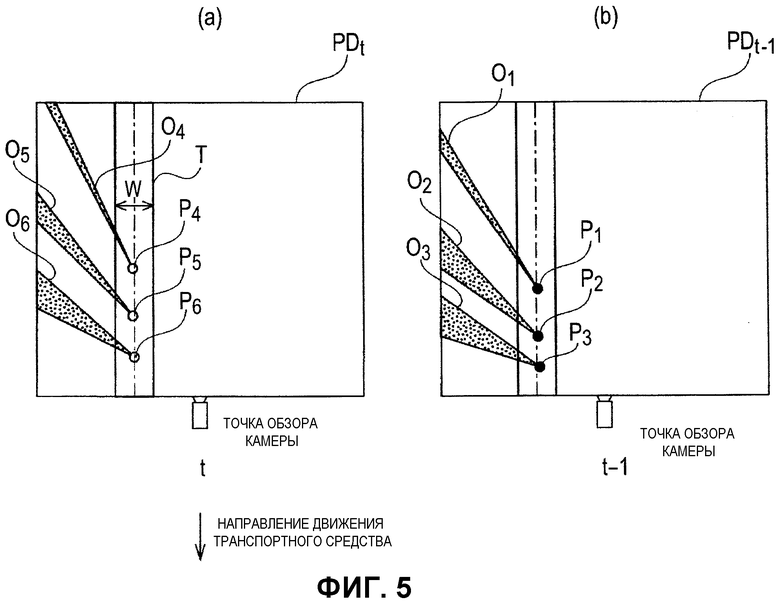
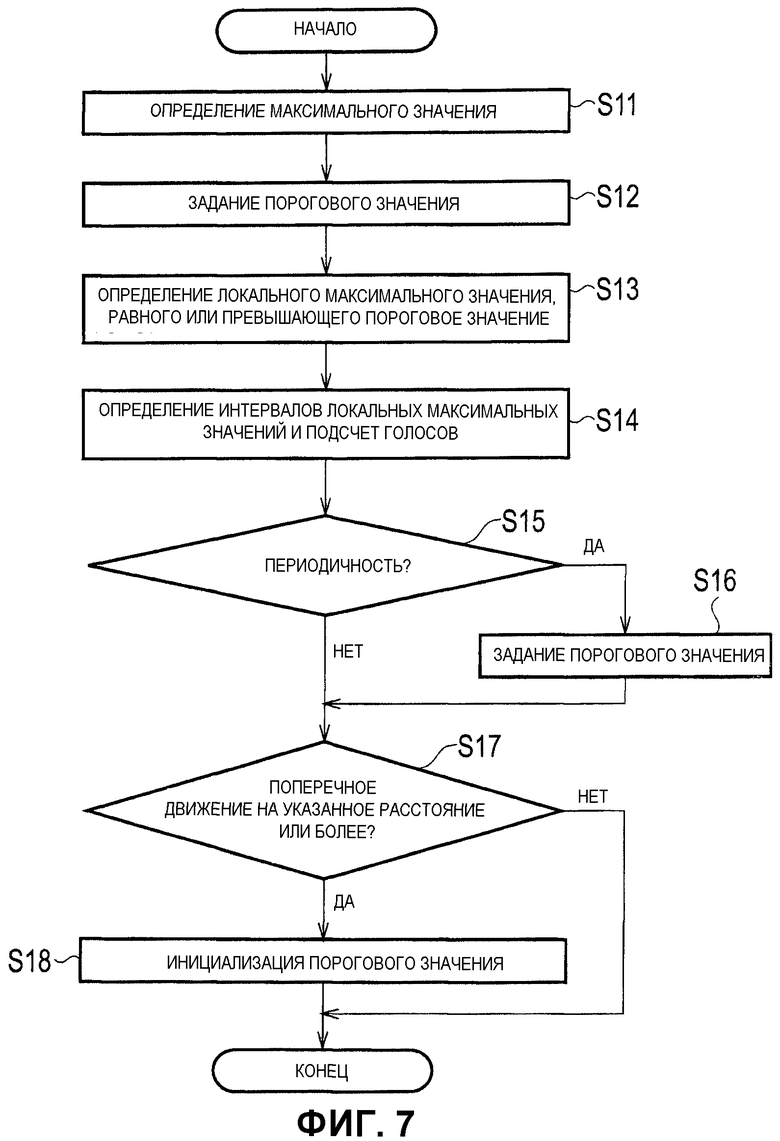
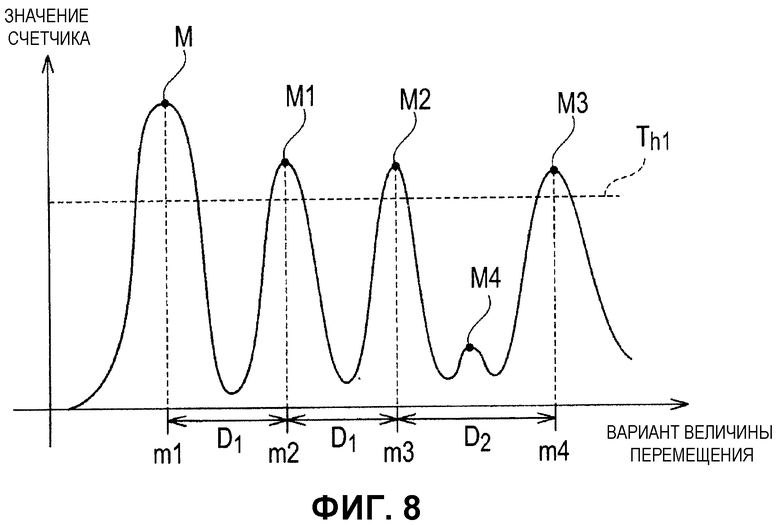
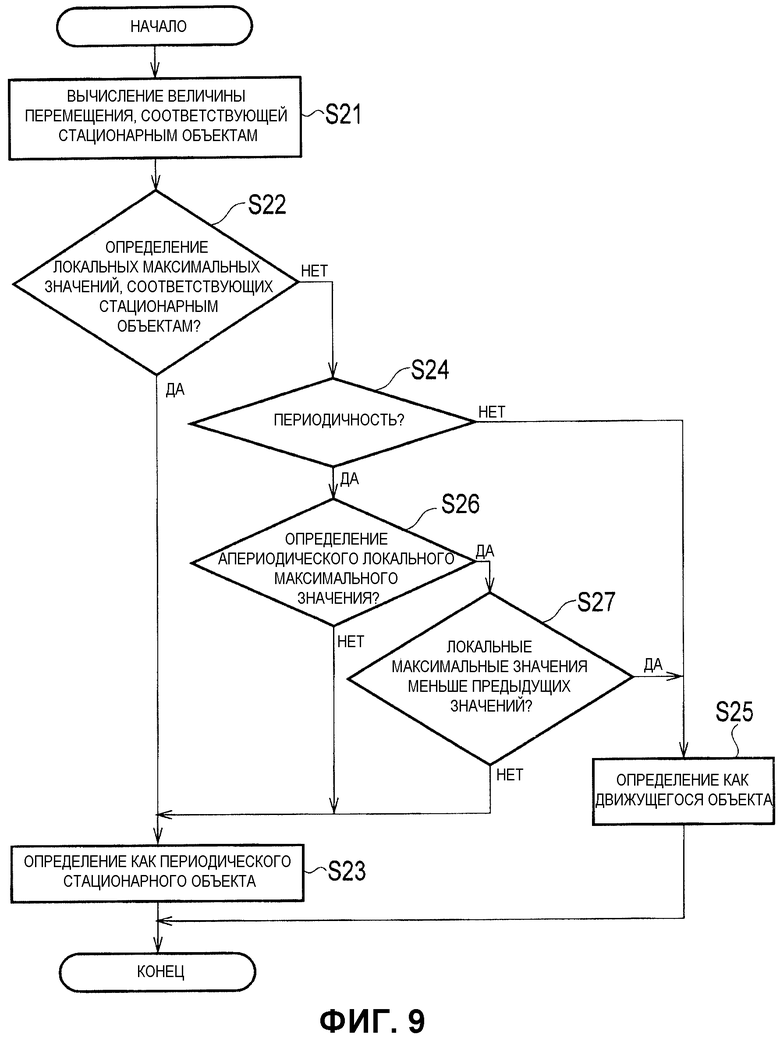
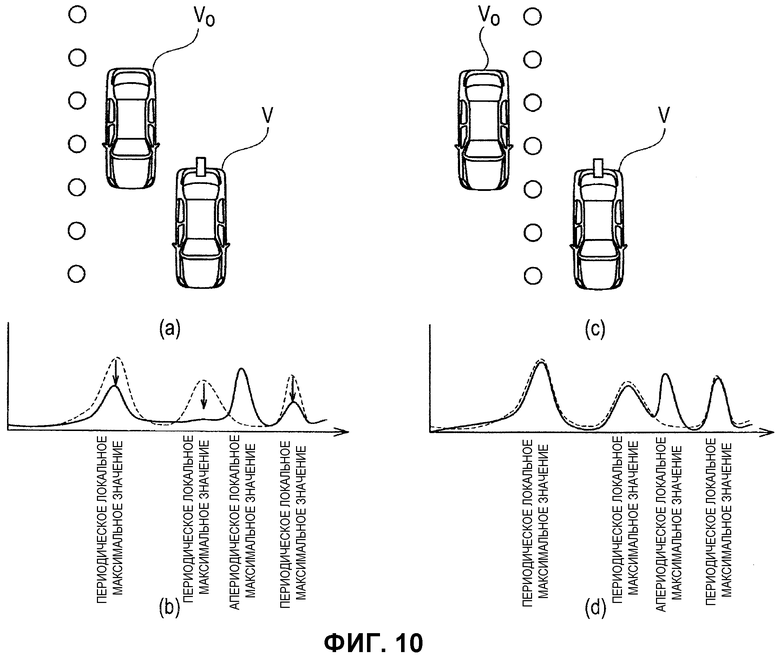
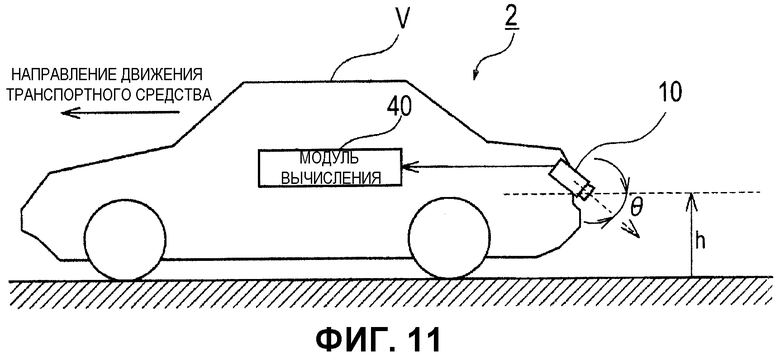
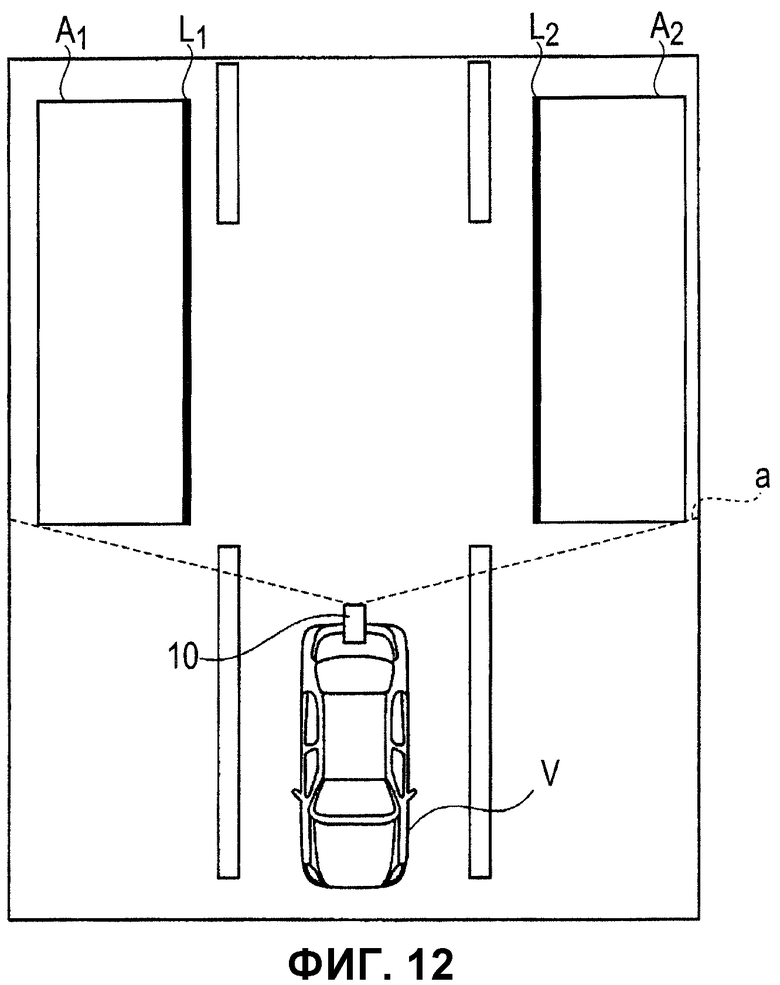
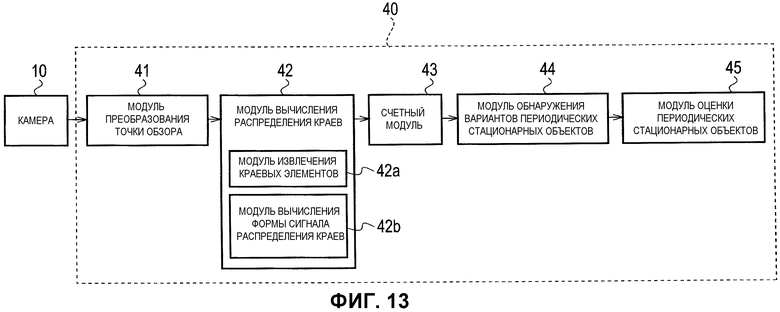
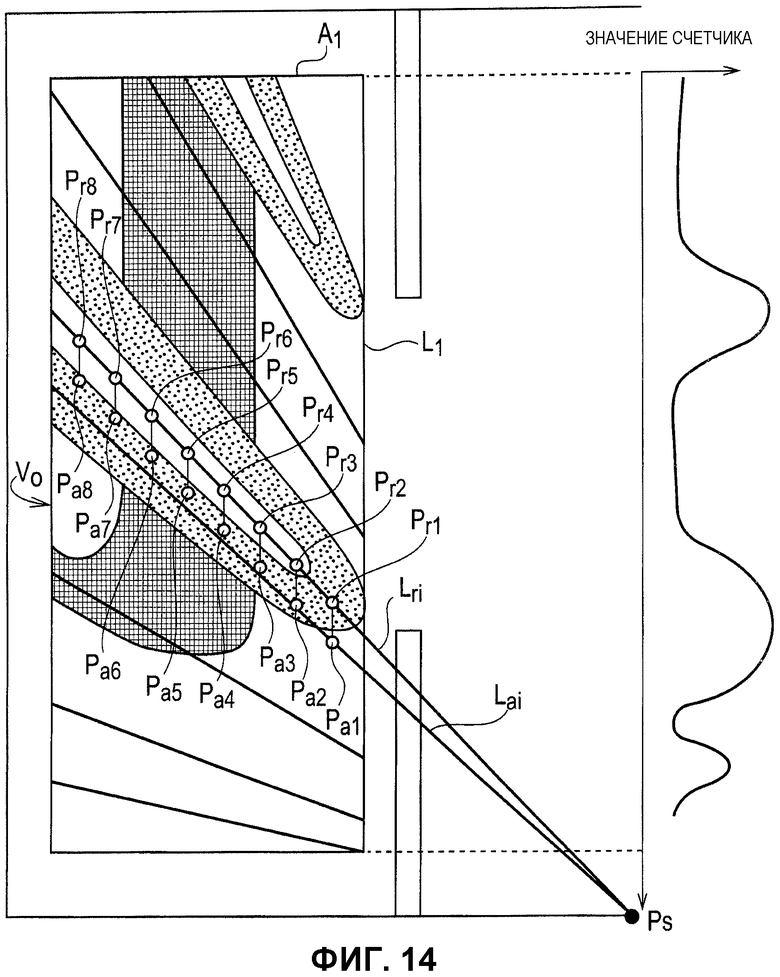
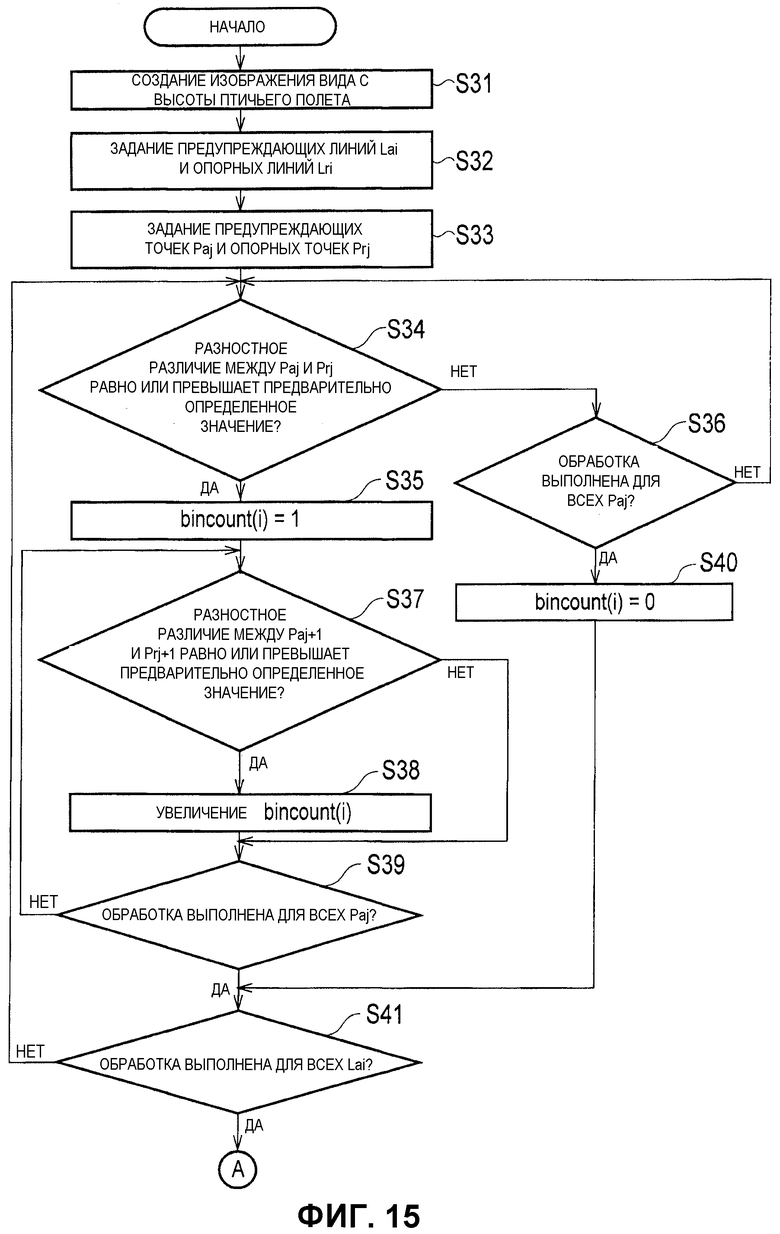
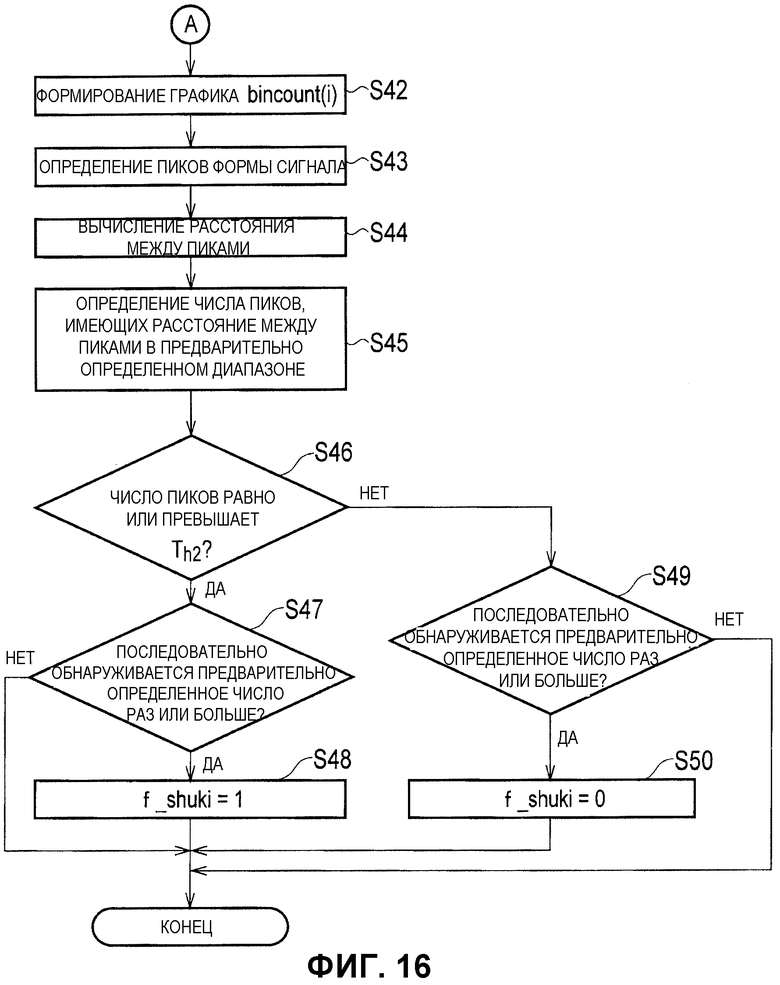
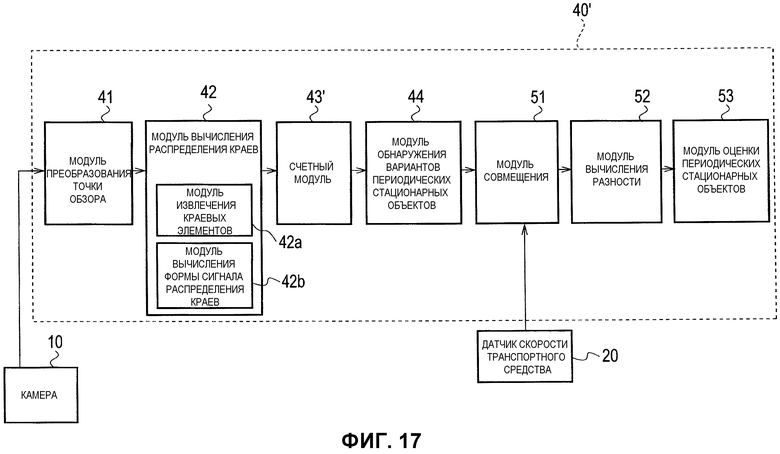
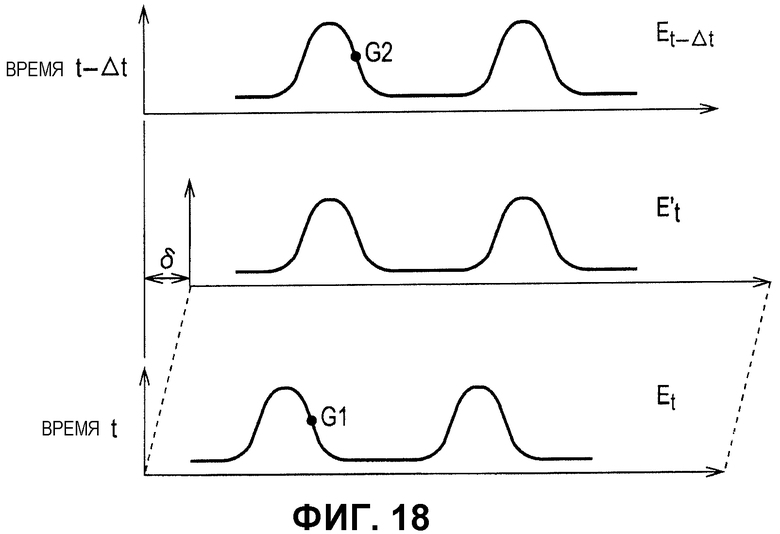
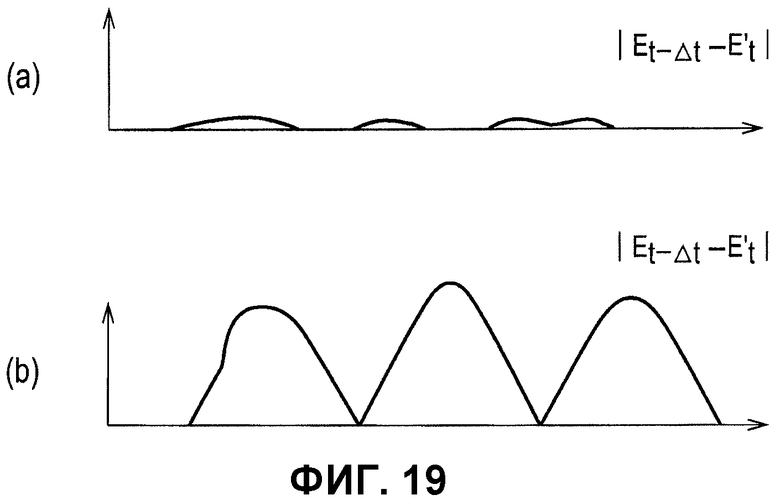
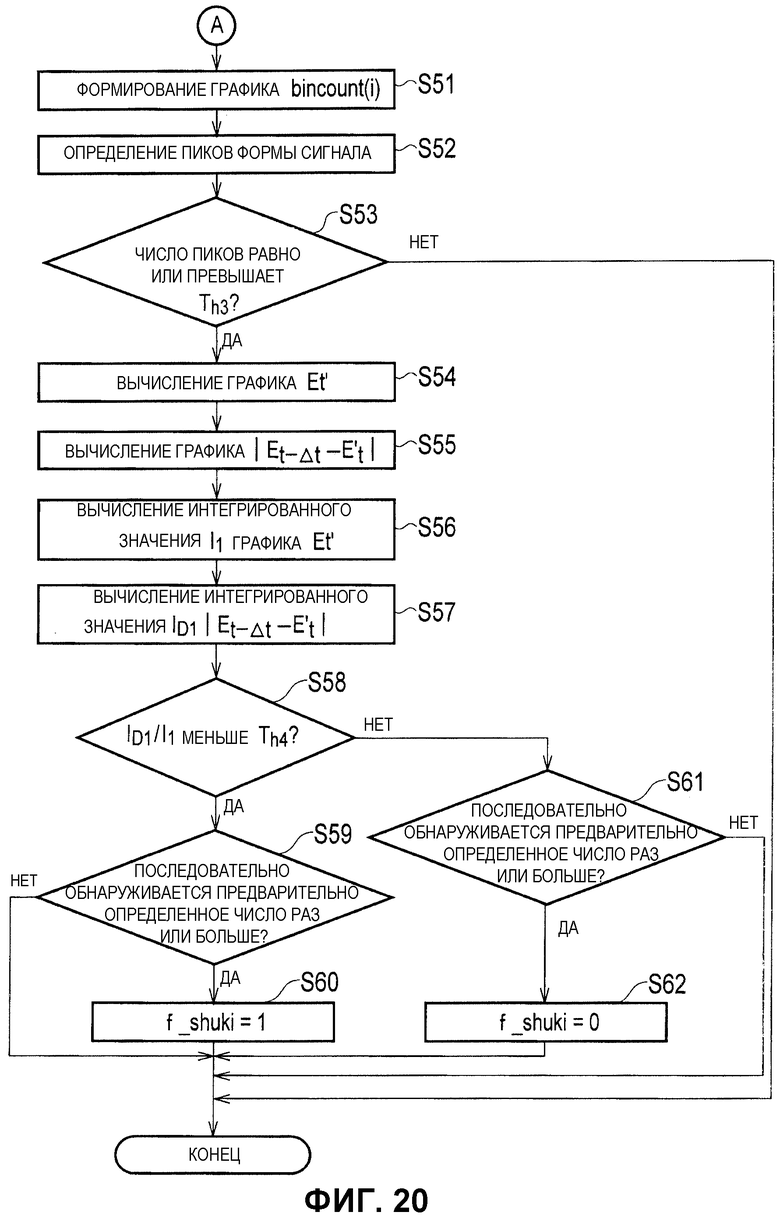
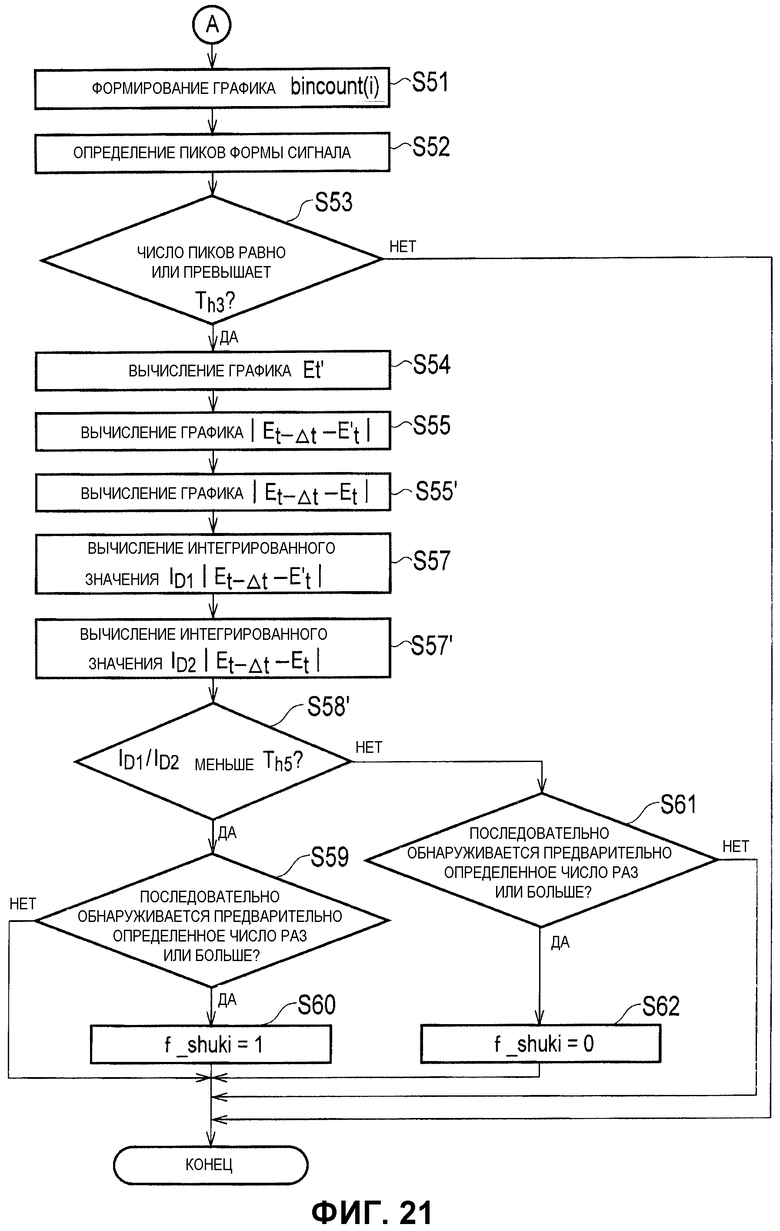
Группа изобретений относится к системе обнаружения периодических стационарных объектов. Система обнаружения периодических стационарных объектов для обнаружения периодического стационарного объекта в окрестностях движущегося объекта содержит устройство захвата изображений, модуль преобразования точки обзора, модуль извлечения характерных точек, модуль вычисления данных формы сигнала, модуль обнаружения информации пиков, модуль обнаружения вариантов периодических стационарных объектов и модуль оценки периодических стационарных объектов. Способ обнаружения периодических стационарных объектов для обнаружения периодических стационарных объектов в окрестности движущегося объекта содержит этап захвата изображений, этап преобразования точки обзора, этап извлечения характерных точек, этап вычисления данных формы сигнала, этап обнаружения информации пиков, этап обнаружения вариантов периодических стационарных объектов и этап оценки периодических стационарных объектов. Достигается высокоточное обнаружение периодических стационарных объектов. 2 н. и 13 з.п. ф-лы, 21 ил.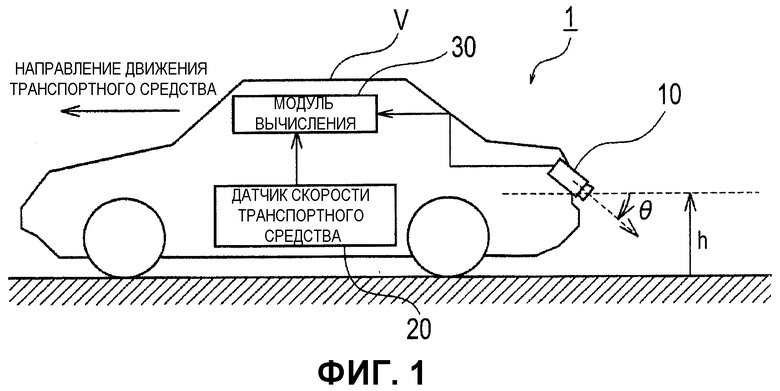
1. Система обнаружения периодических стационарных объектов для обнаружения периодического стационарного объекта в окрестностях движущегося объекта, содержащая:
- устройство захвата изображений, смонтированное на движущемся объекте и допускающее захват изображения окрестностей движущегося объекта;
- модуль преобразования точки обзора, выполненный с возможностью осуществлять преобразование точки обзора для изображения, захваченного посредством устройства захвата изображений, чтобы создавать изображение вида с высоты птичьего полета;
- модуль извлечения характерных точек, выполненный с возможностью извлекать характерную точку трехмерного объекта из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из множества подобластей, включенных в предварительно определенную область;
- модуль вычисления данных формы сигнала, выполненный с возможностью вычислять данные формы сигнала, соответствующие распределению характерных точек, извлеченных посредством модуля извлечения характерных точек в предварительно определенной области для изображения вида с высоты птичьего полета;
- модуль обнаружения информации пиков, выполненный с возможностью обнаруживать информацию пиков данных формы сигнала;
- модуль обнаружения вариантов периодических стационарных объектов, выполненный с возможностью оценивать то, является или нет трехмерный объект, имеющий характерную точку, извлеченную посредством модуля извлечения характерных точек, вариантом периодического стационарного объекта, на основе того, равна или превышает либо нет информация пиков предварительно определенное первое пороговое значение, и
- модуль оценки периодических стационарных объектов, выполненный с возможностью определять то, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта обнаруживается посредством модуля обнаружения вариантов периодических стационарных объектов, и обнаружение осуществляется при предварительно определенном условии.
2. Система обнаружения периодических стационарных объектов по п.1, в которой:
- модуль извлечения характерных точек извлекает краевые элементы, присутствующие вдоль каждой из множества вертикальных виртуальных линий, идущих в вертикальном направлении в фактическом пространстве,
- модуль вычисления данных формы сигнала суммирует число краевых элементов, извлеченных посредством модуля извлечения характерных точек для каждой из множества вертикальных виртуальных линий, и вычисляет форму сигнала распределения краев на основе числа таких суммированных краевых элементов,
- модуль обнаружения информации пиков является счетным модулем, выполненным с возможностью обнаруживать пики формы сигнала распределения краев, вычисленной посредством модуля вычисления данных формы сигнала, и подсчитывать число пиков, обнаруженных таким образом, и
- модуль обнаружения вариантов периодических стационарных объектов определяет то, что трехмерный объект, имеющий характерную точку, извлеченную посредством модуля извлечения характерных точек, является вариантом периодического стационарного объекта, когда число пиков, подсчитанное посредством счетного модуля, равно или превышает предварительно определенное второе пороговое значение.
3. Система обнаружения периодических стационарных объектов по п.2, в которой счетный модуль обнаруживает пики формы сигнала распределения краев, вычисленной посредством модуля вычисления данных формы сигнала, и подсчитывает число пиков, совмещенных через равные интервалы, для пиков, обнаруженных таким образом.
4. Система обнаружения периодических стационарных объектов по любому из пп.1-3, в которой модуль оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта непрерывно обнаруживается в течение предварительно определенного периода времени.
5. Система обнаружения периодических стационарных объектов по п.2, дополнительно содержащая:
- детектор скорости, выполненный с возможностью определять скорость движения движущегося объекта;
- модуль совмещения, выполненный с возможностью совмещать позицию формы сигнала распределения краев в первое время, вычисленную посредством модуля вычисления данных формы сигнала, с позицией формы сигнала распределения краев во второе время, отличающееся от первого времени, на основе скорости движения, определенной посредством детектора скорости, и
- модуль вычисления разности, выполненный с возможностью вычислять разностную форму сигнала распределения между формой сигнала распределения краев во второе время и формой сигнала распределения краев, совмещенной посредством модуля совмещения, при этом:
- модуль оценки периодических стационарных объектов:
- интегрирует разностную форму сигнала распределения, вычисленную посредством модуля вычисления разности, чтобы вычислять первое интегрированное значение,
- интегрирует любую из формы сигнала распределения краев в первое время, формы сигнала распределения краев во второе время и формы сигнала распределения краев, совмещенной посредством модуля совмещения, чтобы вычислять второе интегрированное значение,
- вычисляет отношение первого интегрированного значения ко второму интегрированному значению и
- определяет то, является или нет вариант периодического стационарного объекта стационарным, на основе того, меньше или нет значение отношения предварительно определенного третьего порогового значения.
6. Система обнаружения периодических стационарных объектов по п.2, дополнительно содержащая:
- детектор скорости, выполненный с возможностью определять скорость движения движущегося объекта;
- модуль совмещения, выполненный с возможностью совмещать позицию формы сигнала распределения краев в первое время, вычисленную посредством модуля вычисления данных формы сигнала, с позицией формы сигнала распределения краев во второе время, отличающееся от первого времени, на основе скорости движения, определенной посредством детектора скорости, и
- модуль вычисления разности, выполненный с возможностью вычислять первую разностную форму сигнала распределения между формой сигнала распределения краев во второе время и формой сигнала распределения краев, совмещенной посредством модуля совмещения, и вторую разностную форму сигнала распределения между формой сигнала распределения краев в первое время и формой сигнала распределения краев во второе время, при этом:
- модуль оценки периодических стационарных объектов:
- интегрирует первую разностную форму сигнала распределения, чтобы вычислять первое интегрированное значение,
- интегрирует вторую разностную форму сигнала распределения, чтобы вычислять второе интегрированное значение,
- вычисляет отношение первого интегрированного значения ко второму интегрированному значению и
- определяет то, является или нет вариант периодического стационарного объекта стационарным, на основе того, меньше или нет значение отношения предварительно определенного четвертого порогового значения.
7. Система обнаружения периодических стационарных объектов по любому из пп.5 и 6, в которой модуль оценки периодических стационарных объектов определяет то, что вариант периодического стационарного объекта является периодическим стационарным объектом, при непрерывном обнаружении того, что вариант периодического стационарного объекта является стационарным в течение предварительно определенного периода времени.
8. Система обнаружения периодических стационарных объектов по п.1, дополнительно содержащая:
- детектор скорости, выполненный с возможностью определять скорость движения движущегося объекта, и
- модуль вычисления диапазона перемещения, выполненный с возможностью вычислять диапазон перемещения периодических стационарных объектов для изображения вида с высоты птичьего полета на основе интервала захвата устройства захвата изображений и скорости движения, определенной посредством детектора скорости, при этом:
- модуль извлечения характерных точек включает в себя:
- модуль совмещения, выполненный с возможностью совмещать позиции данных изображений в различные моменты времени, созданных посредством модуля преобразования точки обзора;
- модуль обнаружения трехмерных объектов, выполненный с возможностью обнаруживать множество трехмерных объектов на основе данных по разностному изображению данных изображений в различные моменты времени, совмещенных посредством модуля совмещения, и
- модуль вычисления вариантов величины перемещения, выполненный с возможностью вычислять варианты величины перемещения множества трехмерных объектов, обнаруженных посредством модуля обнаружения трехмерных объектов,
- модуль вычисления данных формы сигнала включает в себя счетный модуль, выполненный с возможностью подсчитывать варианты величины перемещения, вычисленные посредством модуля вычисления вариантов величины перемещения, и формировать гистограмму в качестве данных формы сигнала,
- когда значения пиков гистограммы, сформированной посредством счетного модуля, равны или превышают предварительно определенное пятое пороговое значение, модуль обнаружения вариантов периодических стационарных объектов определяет то, что трехмерные объекты, связанные с вариантами величины перемещения, соответствующими пикам, являются вариантами периодических стационарных объектов и
- модуль оценки периодических стационарных объектов оценивает то, что варианты периодических стационарных объектов являются периодическими стационарными объектами, когда пики гистограммы присутствуют в диапазоне перемещения, вычисленном посредством модуля вычисления диапазона перемещения.
9. Система обнаружения периодических стационарных объектов по п.8, в которой модуль вычисления вариантов величины перемещения вычисляет множество вариантов величины перемещения для каждого из трехмерных объектов.
10. Система обнаружения периодических стационарных объектов по любому из пп.8 и 9, в которой модуль обнаружения вариантов периодических стационарных объектов задает предварительно определенное пятое пороговое значение, полученное из максимального значения пиков.
11. Система обнаружения периодических стационарных объектов по п. 8 или 9, дополнительно содержащая модуль определения периодичности, выполненный с возможностью оценивать то, существует или нет периодичность, из позиций, в которых возникают пики, и понижать предварительно определенное пятое пороговое значение при оценке того, что существует периодичность.
12. Система обнаружения периодических стационарных объектов по п.11, в которой модуль определения периодичности оценивает то, существует или нет периодичность, из позиций, в которых возникают пики, причем пики имеют значения, равные или превышающие предварительно определенное пятое пороговое значение, заданное из максимального значения пиков.
13. Система обнаружения периодических стационарных объектов по п. 11, дополнительно содержащая модуль обнаружения поперечного движения, выполненный с возможностью обнаруживать поперечное движение движущегося объекта, и
- когда модуль обнаружения поперечного движения обнаруживает поперечное движение на указанное расстояние или более, и понижено предварительно определенное пятое пороговое значение, модуль определения периодичности инициализирует пониженное пятое пороговое значение.
14. Система обнаружения периодических стационарных объектов по п. 8 или 9, в которой:
- модуль оценки периодических стационарных объектов:
- сохраняет позиции, в которых возникают пики, и их пиковые значения, когда оценено то, что существует периодичность в предыдущей обработке,
- оценивает то, что варианты периодических стационарных объектов являются периодическими стационарными объектами, в случае обнаружения пика, имеющего пиковое значение, равное или превышающее предварительно определенное пятое пороговое значение, отличного от пиков, имеющих согласно оценке периодичность в текущей обработке, когда среднее значение пиковых значений, имеющих согласно оценке периодичность в текущей обработке, не меньше среднего значения пиковых значений, имеющих согласно оценке периодичность в предыдущей обработке, на предварительно определенное значение или более, и
- оценивает то, что движущиеся объекты присутствуют, когда среднее значение пиковых значений, имеющих согласно оценке периодичность в текущей обработке, меньше среднего значения пиковых значений, имеющих согласно оценке периодичность в предыдущей обработке, на предварительно определенное значение или более.
15. Способ обнаружения периодических стационарных объектов для обнаружения периодических стационарных объектов в окрестности движущегося объекта, содержащий:
- этап захвата изображений, на котором захватывают изображение окрестностей движущегося объекта с использованием устройства захвата изображений, смонтированного на движущемся объекте;
- этап преобразования точки обзора, на котором выполняют преобразование точки обзора для изображения, захваченного посредством устройства захвата изображений, чтобы создавать изображение вида с высоты птичьего полета;
- этап извлечения характерных точек, на котором извлекают характерную точку трехмерного объекта из данных изображений в предварительно определенной области изображения вида с высоты птичьего полета для каждой из множества подобластей, включенных в предварительно определенную область;
- этап вычисления данных формы сигнала, на котором вычисляют данные формы сигнала, соответствующие распределению характерных точек, извлеченному на этапе извлечения характерных точек в предварительно определенной области для изображения вида с высоты птичьего полета;
- этап обнаружения информации пиков, на котором обнаруживают информацию пиков данных формы сигнала;
- этап обнаружения вариантов периодических стационарных объектов, на котором оценивают то, является или нет трехмерный объект, имеющий характерную точку, извлеченную на этапе извлечения характерных точек, вариантом периодического стационарного объекта, на основе того, равна или превышает либо нет информация пиков предварительно определенное первое пороговое значение, и
- этап оценки периодических стационарных объектов, на котором определяют то, что вариант периодического стационарного объекта является периодическим стационарным объектом, когда вариант периодического стационарного объекта обнаруживается на этапе обнаружения вариантов периодических стационарных объектов, и обнаружение осуществляется при предварительно определенном условии.
| US 6923080 B1, 02.08.2005 | |||
| US 2001040505, 15.11.2001 | |||
| JP 2010211701 A, 24.09.2010 | |||
| JP 2008003941 A, 10.01.2008 | |||
| JP 2009266136 A, 12.11.2009 |

