Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к устройству обнаружения трехмерных объектов.
Данная заявка испрашивает приоритет на основе заявки на патент Японии № 2012-046629, поданной 2 марта 2012 года, и в указанных государствах, которые признают включение документа по ссылке, содержимое, описанное в вышеуказанной заявке, содержится в данном документе по ссылке и считается частью описания настоящей заявки.
Уровень техники
[0002] В известной из уровня техники технологии захваченные изображения, захваченные посредством устройства захвата изображений, подвергаются обработке изображений с использованием сопоставления с шаблоном, чтобы за счет этого обнаруживать придорожные посадки (см. патентный документ 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. Выложенная заявка на патент Японии № 2006-315482.
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Тем не менее, в известной из уровня техники технологии кустарниковые насаждения обнаруживаются посредством обработки изображений, выполняемой посредством сопоставления с шаблоном. Следовательно, высокая точность обнаружения не может быть получена при обнаружение растущих придорожных посадок, и могут быть случаи, в которых растущие придорожные посадки в захваченном изображении ошибочно обнаруживаются в качестве другого транспортного средства, движущегося в соседней полосе движения.
[0005] Проблема, которая должна решаться посредством настоящего изобретения, заключается в том, чтобы предоставлять устройство обнаружения трехмерных объектов, способное к надлежащему обнаружению соседнего транспортного средства.
Средство для решения указанных проблем
[0006] Настоящее изобретение решает эту проблему посредством обнаружения трехмерного объекта на основе захваченного изображения, вычисления величины изменчивости в скорости движения трехмерного объекта на основе величины изменения во времени скорости движения обнаруженного трехмерного объекта и оценки того, является или нет обнаруженный трехмерный объект объектом, который не должен быть обнаружен, на основе вычисленной величины изменчивости.
Положительные эффекты изобретения
[0007] В общем, компоненты краев и другая информация изображений в изображении, в котором захвачены растущие придорожные посадки, обнаруживаются нерегулярно. Следовательно, скорость движения трехмерного объекта имеет тенденцию к изменению, когда величина изменения во времени скорости движения трехмерного объекта вычисляется на основе информации изображений. В соответствии с настоящим изобретением, оценивается то, является или нет обнаруженный трехмерный объект растущими придорожными посадками или другим объектом, который не должен быть обнаружен, на основе величины изменчивости в скорости движения трехмерного объекта, посредством чего соседнее транспортное средство может обнаруживаться надлежащим образом.
Краткое описание чертежей
[0008] Фиг. 1 является структурной схемой транспортного средства, в котором смонтировано устройство обнаружения трехмерных объектов.
Фиг. 2 является видом сверху, иллюстрирующим состояние движения транспортного средства на фиг. 1.
Фиг. 3 является блок-схемой, иллюстрирующей части компьютера.
Фиг. 4 является видом, описывающим общее представление обработки модуля; фиг. 4(a) является видом сверху, иллюстрирующим состояние движения транспортного средства, а фиг. 4(b) является изображением, иллюстрирующим общее представление совмещения.
Фиг. 5 является схематичным видом, иллюстрирующим способ, которым форма разностного сигнала, формируется посредством модуля обнаружения трехмерных объектов.
Фиг. 6 является видом, описывающим небольшие области, разделенные посредством модуля обнаружения трехмерных объектов.
Фиг. 7 является видом, иллюстрирующим пример гистограммы, получаемой посредством модуля обнаружения трехмерных объектов.
Фиг. 8 является видом, иллюстрирующим взвешивание, используемое посредством модуля обнаружения трехмерных объектов.
Фиг. 9 является видом, иллюстрирующим другой пример гистограммы, получаемой посредством модуля обнаружения трехмерных объектов.
Фиг. 10 является видом, описывающим способ оценки объекта, который не должен быть обнаружен.
Фиг. 11 является видом для описания увеличения и уменьшения значения счетчика.
Фиг. 12 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения соседнего транспортного средства (часть 1).
Фиг. 13 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения соседнего транспортного средства (часть 2).
Фиг. 14 является блок-схемой, иллюстрирующей части компьютера согласно второму варианту осуществления.
Фиг. 15 является видом, иллюстрирующим состояние движения транспортного средства; фиг. 15(a) является видом сверху, иллюстрирующим взаимное расположение области обнаружения и т.п., а фиг. 15(b) является видом в перспективе, иллюстрирующим взаимное расположение области обнаружения и т.п. в реальном пространстве.
Фиг. 16 является видом для описания работы модуля вычисления яркостного различия согласно второму варианту осуществления; фиг. 16(a) является видом, иллюстрирующим взаимное расположение линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в изображении вида "с высоты птичьего полета", а фиг. 16(b) является видом, иллюстрирующим взаимное расположение линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в реальном пространстве.
Фиг. 17 является видом для описания подробной работы модуля вычисления яркостного различия согласно второму варианту осуществления; фиг. 17(a) является видом, иллюстрирующим область обнаружения в изображении вида "с высоты птичьего полета", а фиг. 17(b) является видом, иллюстрирующим взаимное расположение линии концентрации внимания, опорной линии, точки концентрации внимания и опорной точки в изображении вида "с высоты птичьего полета".
Фиг. 18 является видом, иллюстрирующим пример изображения для описания операции обнаружения краев.
Фиг. 19 является видом, иллюстрирующим линию края и распределение яркости на линии края; фиг. 19(a) является видом, иллюстрирующим распределение яркости, когда трехмерный объект (соседнее транспортное средство) присутствует в области обнаружения, а фиг. 19(b) является видом, иллюстрирующим распределение яркости, когда трехмерный объект не присутствует в области обнаружения.
Фиг. 20 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения соседнего транспортного средства согласно второму варианту осуществления (часть 1).
Фиг. 21 является блок-схемой последовательности операций, иллюстрирующей способ обнаружения соседнего транспортного средства согласно второму варианту осуществления (часть 2).
Предпочтительные варианты осуществления изобретения
[0009] Вариант 1 осуществления
Фиг. 1 является схематичным видом транспортного средства, в котором смонтировано устройство 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления. Цель устройства 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления состоит в том, чтобы обнаруживать другое транспортное средство (ниже может называться "соседним транспортным средством V2"), присутствующее в соседней полосе движения, в которой контакт является возможным, если рассматриваемое транспортное средство V1 собирается сменить полосу движения. Устройство 1 обнаружения трехмерных объектов согласно настоящему варианту осуществления снабжено камерой 10, датчиком 20 скорости и компьютером 30, как проиллюстрировано на фиг. 1.
[0010] Камера 10 крепится к рассматриваемому транспортному средству V1 таким образом, что оптическая ось составляет угол θ вниз от горизонтали в местоположении на высоте h в задней части рассматриваемого транспортного средства V1, как проиллюстрировано на фиг. 1. Из этой позиции, камера 10 захватывает предварительно определенную область окружения рассматриваемого транспортного средства V1. Датчик 20 скорости обнаруживает скорость движения рассматриваемого транспортного средства V1 и вычисляет скорость транспортного средства из скорости вращения колес, обнаруженной, например, посредством датчика скорости вращения колес для обнаружения скорости вращения колеса. Компьютер 30 обнаруживает соседнее транспортное средство, присутствующее в соседней полосе движения позади рассматриваемого транспортного средства.
[0011] Фиг. 2 является видом сверху, иллюстрирующим состояние движения рассматриваемого транспортного средства V1 на фиг. 1. Как проиллюстрировано на чертеже, камера 10 захватывает заднюю сторону относительно транспортного средства под предварительно определенным углом a обзора. В это время, угол a обзора камеры 10 задается равным углу обзора, который дает возможность захвата левой и правой полос движения (соседних полос движения) в дополнение к полосе движения, в которой движется рассматриваемое транспортное средство V1.
[0012] Фиг. 3 является блок-схемой, иллюстрирующей части компьютера 30 на фиг. 1. Камера 10 и датчик 20 скорости также иллюстрируются на фиг. 3, чтобы ясно указывать взаимосвязи соединений.
[0013] Как проиллюстрировано на фиг. 3, компьютер 30 снабжен модулем 31 преобразования точки обзора, модулем 32 совмещения, модулем 33 обнаружения трехмерных объектов и модулем 34 оценки трехмерных объектов. Ниже описывается конфигурация этих модулей.
[0014] Захваченные данные изображений предварительно определенной области, полученные посредством захвата, выполняемого посредством камеры 10, вводятся в модуль 31 преобразования точки обзора, и захваченные данные изображений, введенные таким способом, преобразуются в данные изображений вида "с высоты птичьего полета", которые являются состоянием вида "с высоты птичьего полета". Состояние вида "с высоты птичьего полета" является состоянием просмотра с точки зрения воображаемой камеры, которая смотрит сверху вниз, например, вертикально вниз. Преобразование точки обзора может быть выполнено способом, описанным, например, в выложенной заявке на патент Японии № 2008-219063. Причина, по которой захваченные данные изображений преобразуются в данные изображений вида "с высоты птичьего полета", основана на таком принципе, что перпендикулярные края, уникальные для трехмерного объекта, преобразуются в группу прямых линий, которая проходит через конкретную фиксированную точку, посредством преобразования точки обзора в данные изображений вида "с высоты птичьего полета", и использование этого принципа дает возможность различения плоского объекта и трехмерного объекта.
[0015] Данные изображений вида "с высоты птичьего полета", полученные посредством преобразования точки обзора, выполняемого посредством модуля 31 преобразования точки обзора, последовательно вводятся в модуль 32 совмещения, и введенные позиции данных изображений вида "с высоты птичьего полета" в различные моменты времени совмещаются. Фиг. 4 является видом для описания общего представления обработки модуля 32 совмещения, фиг. 4(a) является видом сверху, иллюстрирующим состояние движения рассматриваемого транспортного средства V1, а фиг. 4(b) является изображением, иллюстрирующим общее представление совмещения.
[0016] Как проиллюстрировано на фиг. 4(a), рассматриваемое транспортное средство V1 в данный момент времени размещается в P1, и рассматриваемое транспортное средство V1 за один момент времени до этого размещается в P1ʹ. Предполагается, что соседнее транспортное средство V2 размещается в направлении стороны сзади относительно рассматриваемого транспортного средства V1 и движется параллельно рассматриваемому транспортному средству V1, и что соседнее транспортное средство V2 в данный момент времени размещается в P2, и соседнее транспортное средство V2 за один момент времени до этого размещается в P2ʹ. Кроме того, предполагается, что рассматриваемое транспортное средство V1 проезжает расстояние d в течение одного момента времени. Фраза "за один момент времени до этого" может быть моментом времени в прошлом, сдвинутым на время, предварительно заданное (например, один цикл управления) с данного момента времени, либо может быть моментом времени в прошлом, сдвинутым на произвольное время.
[0017] В этом состоянии, изображение PBt вида "с высоты птичьего полета" в текущее время является таким, как показано на фиг. 4(b). Белые линии дорожной разметки, нарисованные на поверхности дороги, являются прямоугольными в этом изображении PBt вида "с высоты птичьего полета" и являются относительно точными в виде сверху, но соседнее транспортное средство V2 (позиция P2) сжимается. То же применимо к изображению PBt-1 вида "с высоты птичьего полета" за один момент времени до этого; белые линии дорожной разметки, нарисованные на поверхности дороги, являются прямоугольными и являются относительно точными в виде сверху, но соседнее транспортное средство V2 (позиция P2ʹ) сжимается. Как описано выше, перпендикулярные края трехмерного объекта (края, которые расположены вертикально в трехмерном пространстве от поверхности дороги, также включаются в строгий смысл перпендикулярного края) выглядят как группа прямых линий вдоль направления сжатия вследствие процесса преобразования точки обзора в данные изображений вида "с высоты птичьего полета", но поскольку плоское изображение на поверхности дороги не включает в себя перпендикулярные края, такое сжатие не возникает, даже когда точка обзора преобразована.
[0018] Модуль 32 совмещения совмещает изображения PBt и PBt-1 вида "с высоты птичьего полета", такие как изображения PBt и PBt-1, описанные выше, с точки зрения данных. Когда это выполняется, модуль 32 совмещения смещает изображение PBt-1 вида "с высоты птичьего полета" за один момент времени до этого и сопоставляет позицию с изображением PBt вида "с высоты птичьего полета" в данный момент времени. Левое изображение и центральное изображение на фиг. 4(b) иллюстрируют состояние смещения посредством проезжаемого расстояния dʹ. Величина dʹ смещения является величиной перемещения в данных изображений вида "с высоты птичьего полета", которые соответствуют фактическому проезжаемому расстоянию d рассматриваемого транспортного средства V1, проиллюстрированного на фиг. 4(a), и определяется на основе сигнала из датчика 20 скорости и времени от одного момента времени до данного момента времени.
[0019] После совмещения модуль 32 совмещения получает разность между изображениями PBt и PBt-1 вида "с высоты птичьего полета" и формирует данные разностного изображения PDt. В настоящем варианте осуществления, модуль 32 совмещения рассматривает абсолютное значение разности в пиксельных значениях изображений PBt и PBt-1 вида "с высоты птичьего полета" таким образом, что оно соответствует варьированию в среде освещения, и когда абсолютное значение равно или превышает предварительно определенное пороговое значение th, пиксельные значения разностного изображения PDt задаются равными 1, а когда абсолютное значение меньше предварительно определенного порогового значения th, пиксельные значения разностного изображения PDt задаются равными 0, что дает возможность формирования данных разностного изображения PDt, к примеру, данных разностного изображения PDt, проиллюстрированных справа на фиг. 4(b).
[0020] Возвращаясь к фиг. 3, модуль 33 обнаружения трехмерных объектов обнаруживает трехмерный объект на основе данных разностного изображения PDt, показанных на фиг. 4(b). В этом случае, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние трехмерного объекта в фактическом пространстве. Модуль 33 обнаружения трехмерных объектов сначала формирует форму DWt разностного сигнала, когда должен быть обнаружен трехмерный объект, и должно быть вычислено проезжаемое расстояние.
[0021] При формировании формы разностного сигнала, модуль 33 обнаружения трехмерных объектов задает область обнаружения в разностном изображении PDt. Цель устройства 1 обнаружения трехмерных объектов настоящего примера состоит в том, чтобы вычислять проезжаемое расстояние для соседнего транспортного средства, с которым имеется вероятность контакта, если рассматриваемое транспортное средство V1 собирается сменить полосу движения. Соответственно, в настоящем примере, прямоугольные области A1, A2 обнаружения задаются позади рассматриваемого транспортного средства V1, как проиллюстрировано на фиг. 2. Такие области A1, A2 обнаружения могут задаваться из относительной позиции до рассматриваемого транспортного средства V1 или могут задаваться на основе позиции белых линий дорожной разметки. При задании на основе позиции белых линий дорожной разметки, устройство 1 обнаружения трехмерных объектов может использовать, например, известные технологии распознавания белых линий дорожной разметки.
[0022] Модуль 33 обнаружения трехмерных объектов распознает в качестве линий L1, L2 пересечения с землей границы областей A1, A2 обнаружения, заданных таким способом, на стороне рассматриваемого транспортного средства V1 (стороне вдоль направления движения), как проиллюстрировано на фиг. 2. В общем, линия пересечения с землей означает линию, в которой трехмерный объект контактирует с землей, но в настоящем варианте осуществления, линия пересечения с землей не является линией контакта с землей, в вместо этого задается способом, описанным выше. Даже в таком случае, разность между линией пересечения с землей согласно настоящему варианту осуществления и нормальной линией пересечения с землей, определенной из позиции соседнего транспортного средства V2, не является чрезвычайно большой, как определено посредством опыта, и фактически не представляет собой проблемы.
[0023] Фиг. 5 является схематичным видом, иллюстрирующим способ, которым формируется форма разностного сигнала посредством модуля 33 обнаружения трехмерных объектов. Как проиллюстрировано на фиг. 5, модуль 33 обнаружения трехмерных объектов формирует форму DWt разностного сигнала из участка, который соответствует областям A1, A2 обнаружения в разностном изображении PDt (чертеж справа на фиг. 4(b)), вычисленном посредством модуля 32 совмещения. В этом случае, модуль 33 обнаружения трехмерных объектов формирует форму DWt разностного сигнала вдоль направления сжатия трехмерного объекта посредством преобразования точки обзора. В примере, проиллюстрированном на фиг. 5, для удобства описана только область A1 обнаружения, но форма DWt разностного сигнала также формируется для области A2 обнаружения с использованием идентичной процедуры.
[0024] Более конкретно, сначала модуль 33 обнаружения трехмерных объектов задает линию La в направлении, в котором трехмерный объект сжимается, в данных разностного изображения PDt. Модуль 33 обнаружения трехмерных объектов затем подсчитывает число разностных пикселов DP, указывающих предварительно определенную разность, на линии La. В настоящем варианте осуществления, разностные пикселы DP, указывающие предварительно определенную разность, имеют пиксельные значения в разностном изображении PDt, которые представляются посредством 0 и 1, и пикселы, указываемые посредством 1, подсчитываются в качестве разностных пикселов DP.
[0025] Модуль 33 обнаружения трехмерных объектов подсчитывает число разностных пикселов DP и после этого определяет точку CP пересечения линии La и линии L1 пересечения с землей. Модуль 33 обнаружения трехмерных объектов затем коррелирует точку CP пересечения и подсчитанное число, определяет позицию на горизонтальной оси, т.е. позицию на оси в вертикальном направлении на чертеже справа на фиг. 5, на основе позиции точки CP пересечения, определяет позицию на вертикальной оси, т.е. позицию на оси в боковом направлении на чертеже справа на фиг. 5, из подсчитанного числа и вычерчивает положения в качестве подсчитанного числа в точке CP пересечения.
[0026] Аналогично, модуль 33 обнаружения трехмерных объектов задает линии Lb, Lc, …, в направлении, в котором трехмерный объект сжимается, подсчитывает число разностных пикселов DP, определяет позицию на горизонтальной оси на основе позиции каждой точки CP пересечения, определяет позицию на вертикальной оси из подсчитанного числа (числа разностных пикселов DP) и вычерчивает положения. Модуль 33 обнаружения трехмерных объектов повторяет вышеуказанное в последовательности, чтобы формировать частотное распределение и за счет этого формировать форму DWt разностного сигнала, как проиллюстрировано на чертеже справа на фиг. 5.
[0027] Здесь, разностные пикселы PD в данных разностного изображения PDt представляют собой пикселы, которые изменены в изображении в различные моменты времени, другими словами, местоположения, которые могут истолковываться как места, в которых присутствовал трехмерный объект. Соответственно, в местоположениях, в которых присутствовал трехмерный объект, число пикселов подсчитывается вдоль направления, в котором трехмерный объект сжимается, чтобы формировать частотное распределение и за счет этого формировать форму DWt разностного сигнала. В частности, число пикселов подсчитывается вдоль направления, в котором трехмерный объект сжимается, и, следовательно, форма DWt разностного сигнала формируется из информации касательно направления высоты относительно трехмерного объекта.
[0028] Линии La и Lb в направлении, в котором трехмерный объект сжимается, имеют различные расстояния, которые перекрывают область A1 обнаружения, как проиллюстрировано на чертеже слева на фиг. 5. Соответственно, число разностных пикселов DP больше на линии La, чем на линии Lb, когда предполагается, что область A1 обнаружения заполнена разностными пикселами DP. По этой причине, модуль 33 обнаружения трехмерных объектов выполняет нормализацию на основе расстояния, на котором линии La, Lb в направлении, в котором трехмерный объект сжимается, и область A1 обнаружения перекрываются, когда позиция на вертикальной оси определяется из подсчитанного числа разностных пикселов DP. В конкретном примере, существует шесть разностных пикселов DP на линии La, и существует пять разностных пикселов DP на линии Lb на чертеже слева на фиг. 5. Соответственно, когда позиция на вертикальной оси определяется из подсчитанного числа на фиг. 5, модуль 33 обнаружения трехмерных объектов делит подсчитанное число на перекрывающееся расстояние или выполняет нормализацию другим способом. Значения формы DWt разностного сигнала, которые соответствуют линиям La, Lb в направлении, в котором сжимается трехмерный объект, в силу этого становятся практически идентичными.
[0029] После того, как сформирована форма DWt разностного сигнала, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние посредством сравнения формы DWt разностного сигнала в данный момент времени и формы DWt-1 разностного сигнала за один момент времени до этого. Другими словами, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние из изменения во времени формы DWt разностного сигнала и формы DWt-1 разностного сигнала.
[0030] Более конкретно, модуль 33 обнаружения трехмерных объектов разделяет форму DWt разностного сигнала на множество небольших областей DWt1-DWtn (где n является произвольным целым числом 2 или больше), как проиллюстрировано на фиг. 6. Фиг. 6 является видом, иллюстрирующим небольшие области DWt1-DWtn, разделенные посредством модуля 33 обнаружения трехмерных объектов. Небольшие области DWt1-DWtn разделяются с возможностью взаимно перекрываться, как проиллюстрировано, например, на фиг. 6. Например, небольшая область DWt1 и небольшая область DWt2 перекрывают друг друга, и небольшая область DWt2 и небольшая область DWt3 перекрывают друг друга.
[0031] Затем, модуль 33 обнаружения трехмерных объектов определяет величину смещения (величину перемещения в направлении по горизонтальной оси (в вертикальном направлении на фиг. 6) формы разностного сигнала) для каждой из небольших областей DWt1-DWtn. Здесь, величина смещения определяется из разности (расстояния в направлении по горизонтальной оси) между формой DWt-1 разностного сигнала за один момент времени до этого и формой DWt разностного сигнала в данный момент времени. В этом случае, модуль 33 обнаружения трехмерных объектов перемещает форму DWt-1 разностного сигнала за один момент времени до этого в направлении по горизонтальной оси для каждой из небольших областей DWt1-DWtn и после этого оценивает позицию (позицию в направлении по горизонтальной оси), в которой ошибка относительно формы DWt разностного сигнала в данный момент времени является минимальной, и определяет в качестве величины смещения величину перемещения в направлении по горизонтальной оси в позиции, в которой ошибка от исходной позиции формы DWt-1 разностного сигнала является минимальной. Модуль 33 обнаружения трехмерных объектов затем подсчитывает величину смещения определенной для каждой из небольших областей DWt1-DWtn и формирует гистограмму.
[0032] Фиг. 7 является видом, иллюстрирующим пример гистограммы, полученной посредством модуля 33 обнаружения трехмерных объектов. Как проиллюстрировано на фиг. 7, в величине смещения возникает некоторая величина изменчивости, которая представляет собой проезжаемое расстояние, в котором ошибка между небольшими областями DWt1-DWtn и формой DWt-1 разностного сигнала за один момент времени до этого является минимальной. Соответственно, модуль 33 обнаружения трехмерных объектов формирует величины смещения, включающие в себя изменчивость, на гистограмме и вычисляет проезжаемое расстояние из гистограммы. В этот момент, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние трехмерного объекта из максимального значения на гистограмме. Другими словами, в примере, проиллюстрированном на фиг. 7, модуль 33 обнаружения трехмерных объектов вычисляет величину смещения, указывающую максимальное значение гистограммы, в качестве проезжаемого расстояния τ*. Таким образом, в настоящем варианте осуществления, более высокоточное проезжаемое расстояние может быть вычислено из максимального значения, даже когда существует изменчивость в величине смещения. Проезжаемое расстояние τ* является относительным проезжаемым расстоянием трехмерного объекта относительно рассматриваемого транспортного средства. Соответственно, модуль 33 обнаружения трехмерных объектов вычисляет абсолютное проезжаемое расстояние на основе проезжаемого расстояния τ*, полученного таким способом, и датчика 20 скорости, когда должно вычисляться абсолютное проезжаемое расстояние.
[0033] Таким образом, в настоящем варианте осуществления, проезжаемое расстояние трехмерного объекта вычисляется из величины смещения формы DWt разностного сигнала, когда ошибка в форме DWt разностного сигнала, сформированной в различные моменты времени, является минимальной, и это дает возможность вычисления проезжаемого расстояния из величины смещения, которая является информацией относительно одной размерности в форме сигнала, и дает возможность поддержания вычислительных затрат на низком уровне, когда вычисляется проезжаемое расстояние. Кроме того, разделение формы DWt разностного сигнала, сформированной в различные моменты времени, на множество небольших областей DWt1-DWtn дает возможность получения множества форм сигналов, представляющих местоположения трехмерного объекта, за счет этого обеспечивая возможность определения величины смещения в каждом местоположении трехмерного объекта и обеспечивая возможность определения проезжаемого расстояния из множества величин смещения. Следовательно, может повышаться точность вычисления проезжаемого расстояния. В настоящем варианте осуществления, проезжаемое расстояние трехмерного объекта вычисляется из изменения во времени формы DWt разностного сигнала, которая включает в себя информацию направления высоты. Следовательно, в отличие от сосредоточения исключительно на движении одной точки, местоположение обнаружения до изменения во времени и местоположение обнаружения после изменения во времени указываются с помощью включенной информации направления высоты и, соответственно, легко в итоге оказываются идентичным местоположением; проезжаемое расстояние вычисляется из изменения во времени в идентичном местоположении; и может повышаться точность вычисления проезжаемого расстояния.
[0034] Когда должна формироваться гистограмма, модуль 33 обнаружения трехмерных объектов может применять взвешивание ко множеству небольших областей DWt1-DWtn и подсчитывать величины смещения, определенные для каждой из небольших областей DWt1-DWtn в соответствии со взвешиванием, чтобы формировать гистограмму. Фиг. 8 является видом, иллюстрирующим взвешивание, используемое посредством модуля 33 обнаружения трехмерных объектов.
[0035] Как проиллюстрировано на фиг. 8, небольшая область DWm (где m является целым числом в 1 или больше и n-1 или меньше) является плоской. Другими словами, в небольшой области DWm, имеется несущественная разность между максимальными и минимальными значениями счетчика числа пикселов, указывающими предварительно определенную разность. Модуль 33 обнаружения трехмерных объектов увеличивает взвешивание этого типа небольшой области DWm. Это обусловлено тем, что в плоской небольшой области DWm отсутствует характерность, и имеется высокая вероятность того, что ошибка должна быть усилена, когда вычисляется величина смещения.
[0036] С другой стороны, небольшая область DWm+k (где k является целым числом в n-m или меньше) имеет значительную неровность. Другими словами, в небольшой области DWm, имеется существенная разность между максимальными и минимальными значениями счетчика числа пикселов, указывающими предварительно определенную разность. Модуль 33 обнаружения трехмерных объектов увеличивает взвешивание этого типа небольшой области DWm. Это обусловлено тем, что небольшая область DWm+k с существенной неровностью является характерной, и имеется высокая вероятность того, что величина смещения вычисляется точно. Взвешивание небольших областей таким способом позволяет повышать точность вычисления проезжаемого расстояния.
[0037] Форма DWt разностного сигнала разделяется на множество небольших областей DW1t1-DWtn в настоящем варианте осуществления, чтобы повышать точность вычисления проезжаемого расстояния, но разделение на небольшие области DWt1-DWtn не требуется, когда точность вычисления проезжаемого расстояния не настолько требуется. В этом случае, модуль 33 обнаружения трехмерных объектов вычисляет проезжаемое расстояние из величины смещения формы DWt разностного сигнала, когда ошибка между формой DWt разностного сигнала и формой DWt-1 разностного сигнала является минимальной. Другими словами, способ определения величины смещения между формой DWt-1 разностного сигнала за один момент времени до этого и формой DWt разностного сигнала в данный момент времени не ограничивается подробностями, описанными выше.
[0038] Модуль 33 обнаружения трехмерных объектов в настоящем варианте осуществления определяет скорость движения рассматриваемого транспортного средства V1 (камера 10) и определяет величину смещения для стационарного объекта из определенной скорости движения. После того, как величина смещения стационарного объекта определена, модуль 33 обнаружения трехмерных объектов игнорирует величину смещения, которая соответствует стационарному объекту в максимальном значении гистограммы, и вычисляет проезжаемое расстояние трехмерного объекта.
[0039] Фиг. 9 является видом, иллюстрирующим другой пример гистограммы, полученной посредством модуля 33 обнаружения трехмерных объектов. Когда стационарный объект, отличный от трехмерного объекта, присутствует в пределах угла обзора камеры 10, два максимальных значения τ1, τ2 появляются на результирующей гистограмме. В этом случае, одно из двух максимальных значений τ1, τ2 является величиной смещения стационарного объекта. Следовательно, модуль 33 обнаружения трехмерных объектов определяет величину смещения для стационарного объекта из скорости движения, игнорирует максимальное значение, которое соответствует величине смещения, и вычисляет проезжаемое расстояние трехмерного объекта с использованием оставшегося максимального значения. За счет этого можно предотвращать ситуацию, в которой точность вычисления проезжаемого расстояния трехмерного объекта уменьшается из-за стационарного объекта.
[0040] Даже когда величина смещения, соответствующая стационарному объекту, игнорируется, может быть множество трехмерных объектов, присутствующих в пределах угла обзора камеры 10, когда существует множество максимальных значений. Тем не менее, множество трехмерных объектов, присутствующих в областях A1, A2 обнаружения, возникают очень редко. Соответственно, модуль 33 обнаружения трехмерных объектов прекращает вычисление проезжаемого расстояния. В настоящем варианте осуществления, за счет этого можно предотвращать ситуацию, в которой вычисляется ошибочное проезжаемое расстояние, к примеру, когда существует множество максимальных значений.
[0041] Кроме того, модуль 33 обнаружения трехмерных объектов вычисляет относительную скорость движения трехмерного объекта посредством дифференцирования во времени относительного проезжаемого расстояния трехмерного объекта. Модуль 33 обнаружения трехмерных объектов также вычисляет абсолютную скорость движения трехмерного объекта на основе относительного проезжаемого расстояния трехмерного объекта. Дополнительно, модуль 33 обнаружения трехмерных объектов многократно вычисляет относительную скорость движения трехмерного объекта с предварительно определенными интервалами и вычисляет величину ΔV изменения во времени относительной скорости движения многократно вычисляемого трехмерного объекта. Величина ΔV изменения во времени вычисленной относительной скорости движения передается в нижеописанный модуль 34 оценки трехмерных объектов.
[0042] Модуль 34 оценки трехмерных объектов, проиллюстрированный на фиг. 3, оценивает то, является или нет трехмерный объект, обнаруженный посредством модуля 33 обнаружения трехмерных объектов, другим транспортным средством (соседним транспортным средством), движущимся в соседней полосе движения. При оценке того, является или нет трехмерный объект соседним транспортным средством, модуль 34 оценки трехмерных объектов также обнаруживает величину изменчивости в информации изображений и оценивает то, является или нет трехмерный объект объектом, не требующим обнаружения, на основе величины изменчивости в обнаруженной информации изображений. В настоящем варианте осуществления, модуль 34 оценки трехмерных объектов вычисляет, в качестве величины изменчивости в информации изображений, абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, вычисленной посредством модуля 33 обнаружения трехмерных объектов на основе захваченного изображения, и оценивает то, является или нет трехмерный объект объектом, не требующим обнаружения, на основе вычисленного абсолютного значения |ΔV|. При использовании в данном документе, термин "объект, не требующий обнаружения" означает придорожные посадки, снег, дорожные ограждения и т.п., которые представляют собой объекты, которые не должны быть обнаружены, в отличие от соседних транспортных средств, которые должны быть обнаружены. Таким образом, в настоящем варианте осуществления, модуль 34 оценки трехмерных объектов оценивает то, является или нет трехмерный объект объектом, не требующим обнаружения, в силу этого эффективно предотвращая ошибочное обнаружение объекта, не требующего обнаружения, в качестве соседнего транспортного средства.
[0043] В частности, модуль 34 оценки трехмерных объектов определяет то, что чем выше величина изменчивости в информации изображений, тем больше абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, и определяет то, что вероятность того, что обнаруженный трехмерный объект является объектом, не требующим обнаружения, является высокой. В настоящем варианте осуществления, модуль 34 оценки трехмерных объектов увеличивает или снижает значение счетчика (вертикальная ось, проиллюстрированная на фиг. 10) в соответствии с абсолютным значением |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, как проиллюстрировано на фиг. 10, и как результат, оценивает обнаруженный трехмерный объект в качестве объекта, не требующего обнаружения, когда значение счетчика имеет первое пороговое значение s1 или больше. Фиг. 10 является видом, описывающим способ обнаружения объекта, не требующего обнаружения.
[0044] Здесь описывается значение счетчика для обнаружения объекта, не требующего обнаружения. Фиг. 11 является таблицей для иллюстрации примера величины увеличения/уменьшения значения счетчика. Модуль 34 оценки трехмерных объектов модифицирует величину увеличения/уменьшения значения счетчика на основе яркости (день/ночь) областей A1, A2 обнаружения и абсолютной величины абсолютного значения |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, как проиллюстрировано на фиг. 11.
[0045] Например, модуль 34 оценки трехмерных объектов обнаруживает яркость областей A1, A2 обнаружения из разностного изображения, и когда яркость областей A1, A2 обнаружения имеет предварительно определенное значение или выше (когда может быть определен день), определяет как высокую вероятность того, что трехмерный объект является объектом, не требующим обнаружения, имеющим значительную изменчивость в компонентах краев и в другой информации изображений, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или больше (когда |ΔV|≥30 км/ч), и увеличивает значение счетчика на X1, как показано на фиг. 11. Когда яркость областей A1, A2 обнаружения меньше предварительно определенного значения (т.е. когда может быть определена ночь), модуль 34 оценки трехмерных объектов увеличивает значение счетчика на X2, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или больше (когда |ΔV|≥30 км/ч). В этом случае, X2 является меньшим значением, чем X1 (X1>X2). Это обусловлено тем фактом, что ночью (когда яркость меньше предварительно определенного значения), контрастность захваченного изображения является низкой, и степень определенности того, что трехмерный объект может оцениваться в качестве объекта, не требующего обнаружения, является низкой.
[0046] Когда яркость имеет предварительно определенное значение или больше (когда может быть определена ночь), модуль 34 оценки трехмерных объектов определяет как низкую вероятность того, что трехмерный объект является объектом, не требующим обнаружения, имеющим значительную изменчивость в компонентах краев и в другой информации изображений, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч или больше (30 км/ч>|ΔV|≥10 км/ч), и снижает значение счетчика на Y1, как проиллюстрировано на фиг. 11. Когда яркость меньше предварительно определенного значения (т.е. когда может быть определена ночь), модуль 34 оценки трехмерных объектов снижает значение счетчика на Y2, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч или больше (когда 30 км/ч>|ΔV|≥10 км/ч). В этом случае, Y2 является меньшим значением, чем Y1 (Y1>Y2), идентично X1, X2.
[0047] Кроме того, когда яркость имеет предварительно определенное значение или больше (когда может быть определен день), модуль 34 оценки трехмерных объектов дополнительно определяет как высокую вероятность того, что трехмерный объект является объектом, не требующим обнаружения, имеющим значительную изменчивость в компоненте края и в другой информации изображений, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (10 км/ч>абсолютное значение |ΔV|), и снижает значение счетчика на Z1, как проиллюстрировано на фиг. 11. В этом случае, Z1 составляет значение, превышающее Y1 (Z1>Y1). Это обусловлено тем фактом, что когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (10 км/ч>абсолютное значение |ΔV|), вероятность того, что трехмерный объект представляет собой соседнее транспортное средство, является более высокой, и степень определенности того, что трехмерный объект может оцениваться в качестве объекта, не требующего обнаружения, является более низкой по сравнению с тем, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч [или больше] (30 км/ч>абсолютное значение |ΔV|≥10 км/ч). Кроме того, когда яркость меньше предварительно определенного значения (когда может быть определен день), модуль 34 оценки трехмерных объектов снижает значение счетчика на Z2, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (10 км/ч>абсолютное значение |ΔV|). В этом случае, Z2 составляет значение, превышающее Y2, идентично Z1 (Z1>Z2), и Z2 составляет значение, меньшее Z1 (Z1>Z2), идентично X1 и X2.
[0048] В качестве результата увеличения или снижения значения счетчика в соответствии с изменчивостью абсолютного значения |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, как проиллюстрировано на фиг. 11, модуль 34 оценки трехмерных объектов оценивает то, что трехмерный объект является объектом, не требующим обнаружения, когда значение счетчика имеет первое пороговое значение s1 или больше, проиллюстрированное на фиг. 10
[0049] Кроме того, модуль 34 оценки трехмерных объектов отменяет оценку того, что трехмерный объект является объектом, не требующим обнаружения, после того, как значение счетчика становится первым пороговым значением s1 или больше, и кроме того, значение счетчика меньше второго порогового значения s2, как проиллюстрировано на фиг. 10. Например, в примере, проиллюстрированном на фиг. 10, значение счетчика имеет первое пороговое значение s1 или больше во время t1, так что оценивается то, что обнаруженный трехмерный объект является объектом, не требующим обнаружения, во время t1, и после этого, во время t2 значение счетчика меньше второго порогового значения s2, и, следовательно, оценивается то, что обнаруженный трехмерный объект не является объектом, не требующим обнаружения, во время t2. Кроме того, в примере, проиллюстрированном на фиг. 10, значение счетчика снова становится первым пороговым значением s1 или больше во время t3, и, следовательно, оценивается то, что обнаруженный трехмерный объект является объектом, не требующим обнаружения, во время t3.
[0050] В примере, проиллюстрированном на фиг. 10, первое пороговое значение s1 предоставляется в качестве верхнего предельного значения, так что значение счетчика не становится первым пороговым значением s1 или больше, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или больше (абсолютное значение |ΔV|≥30 км/ч). Значение счетчика, ставшее значением, равным первому пороговому значению s1, в силу этого может быть быстро уменьшено до значения, меньшего второго порогового значения s2, в настоящем варианте осуществления, когда соседнее транспортное средство, движущееся в соседней полосе движения, фактически обнаружено, за счет этого обеспечивая возможность надлежащего обнаружения соседнего транспортного средства. В примере, проиллюстрированном на фиг. 10, первое пороговое значение s1 задается в качестве верхнего предельного значения для значения счетчика, но ограничения на это не накладываются, и также можно задавать значение, превышающее первое пороговое значение s1, в качестве верхнего предельного значения для значения счетчика, или задавать значение, меньшее первого порогового значения s1, в качестве верхнего предельного значения для значения счетчика.
[0051] Модуль 34 оценки трехмерных объектов увеличивает или снижает значение счетчика таким способом, чтобы за счет этого оценивать то, является или нет трехмерный объект, обнаруженный посредством модуля 33 обнаружения трехмерных объектов, объектом, не требующим обнаружения, и предотвращает обнаружение обнаруженного трехмерного объекта в качестве соседнего транспортного средства, когда обнаруженный трехмерный объект оценен в качестве объекта, не требующего обнаружения. За счет этого можно эффективно предотвращать ошибочное обнаружение растущих придорожных посадок и других объектов, не требующих обнаружения, в качестве соседнего транспортного средства.
[0052] Далее описывается процесс обнаружения соседнего транспортного средства в соответствии с настоящим вариантом осуществления. Фиг. 12 и 13 являются блок-схемами последовательности операций, иллюстрирующими процессы обнаружения соседнего транспортного средства согласно настоящему варианту осуществления. Во-первых, данные захваченного изображения P получаются посредством компьютера 30 из камеры 10 (этап S101), и данные изображения PBt вида "с высоты птичьего полета" формируются (этап S102) на основе данных захваченного изображения P, полученных таким способом, как проиллюстрировано на фиг. 12 и 13.
[0053] Далее, модуль 33 совмещения совмещает данные изображения PBt вида "с высоты птичьего полета" и данные изображения PBt-1 вида "с высоты птичьего полета" за один момент времени до этого и формирует данные разностного изображения PDt (этап S103). Модуль 33 обнаружения трехмерных объектов затем подсчитывает число разностных пикселов DP, имеющих пиксельное значение 1, чтобы этого формировать форму DWt разностного сигнала из данных разностного изображения PDt (этап S104).
[0054] Модуль 33 обнаружения трехмерных объектов затем определяет то, имеет или нет пик в форме DWt разностного сигнала предварительно определенное пороговое значение α или больше (этап S105). Когда пик формы DWt разностного сигнала не имеет пороговое значение α или больше, т.е. когда нет по существу никакой разности, возможно то, что трехмерный объект не присутствует в захваченном изображении P. Соответственно, когда определено то, что пик формы DWt разностного сигнала не имеет пороговое значение α или больше (этап S105="Нет"), модуль 33 обнаружения трехмерных объектов определяет то, что другое транспортное средство не присутствует, когда не присутствует трехмерный объект (этап S130 на фиг. 13).
[0055] С другой стороны, когда определяется то, что пик в форме DWt разностного сигнала имеет пороговое значение α или больше (этап S105="Да"), модуль 33 оценки трехмерных объектов определяет то, что трехмерный объект присутствует в соседней полосе движения, и переходит к этапу S106, и форма DWt разностного сигнала разделяется на множество небольших областей DWt1-DWtn посредством модуля 33 обнаружения трехмерных объектов. Модуль 33 обнаружения трехмерных объектов затем применяет взвешивание к каждой из небольших областей DWt1-DWtn (этап S107), вычисляет величину смещения для каждой из небольших областей DWt1-DWtn (этап S108) и формирует гистограмму с учетом взвешиваний (этап S109).
[0056] Модуль 33 обнаружения трехмерных объектов вычисляет относительное проезжаемое расстояние, которое представляет собой проезжаемое расстояние соседнего транспортного средства относительно рассматриваемого транспортного средства, на основе гистограммы (этап S110), и дифференцирует по времени вычисленное относительное проезжаемое расстояние, чтобы за счет этого вычислять относительную скорость движения (этап S111). Кроме того, модуль 33 обнаружения трехмерных объектов прибавляет скорость рассматриваемого транспортного средства, обнаруженную посредством датчика 20 скорости, и вычисляет абсолютную скорость движения соседнего транспортного средства (этап S112).
[0057] Переходя к фиг. 13, модуль 34 оценки трехмерных объектов определяет (этап S113) то, составляет или нет абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта 30 км/ч или выше (абсолютное значение |ΔV|≥30 км/ч). Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или выше (абсолютное значение |ΔV|≥30 км/ч (этап S113="Да")), и когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S114="Да"), значение счетчика увеличивается на X1 (этап S115), как проиллюстрировано на фиг. 11. Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или выше (абсолютное значение |ΔV|≥30 км/ч (этап S113="Да")), и когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S114="Нет"), модуль 34 оценки трехмерных объектов увеличивает значение счетчика на X2 (этап S116), как проиллюстрировано на фиг. 11.
[0058] Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч или выше (30 км/ч>абсолютное значение |ΔV|≥10 км/ч (этап S117="Да")), и когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S118="Да"), модуль 34 оценки трехмерных объектов снижает значение счетчика на Y1 (этап S119), как проиллюстрировано на фиг. 11. Кроме того, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч или выше (30 км/ч>абсолютное значение |ΔV|≥10 км/ч (этап S117="Да")), и когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S118="Нет"), модуль 34 оценки трехмерных объектов снижает значение счетчика на Y2 (этап S120), как проиллюстрировано на фиг. 11.
[0059] Кроме того, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (10 км/ч>абсолютное значение |ΔV| (этап S117="Нет")), и когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S121="Да"), модуль 34 оценки трехмерных объектов снижает значение счетчика на Z1 (этап S122), как проиллюстрировано на фиг. 11. Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (этап S117="Нет"), и когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S121="Нет"), модуль 34 оценки трехмерных объектов снижает значение счетчика на Z2 (этап S123), как проиллюстрировано на фиг. 11.
[0060] На этапе S124, модуль 34 оценки трехмерных объектов определяет то, имеет или нет значение счетчика первое пороговое значение s1 или больше, проиллюстрированное на фиг. 10. Процесс переходит к этапу S129, когда значение счетчика имеет первое пороговое значение s1 или больше, и обнаруженный трехмерный объект оценивается в качестве объекта, не требующего обнаружения, посредством модуля 34 оценки трехмерных объектов. После этого процесс переходит к этапу S130, и определяется то, что соседнее транспортное средство не присутствует в соседней полосе движения, посредством модуля 34 оценки трехмерных объектов. С другой стороны, когда значение счетчика меньше первого порогового значения s1, процесс переходит к этапу S125.
[0061] На этапе S125, после того, как значение счетчика становится равным или превышающим первое пороговое значение s1, модуль 34 оценки трехмерных объектов определяет то, становится или нет значение счетчика меньше первого порогового значения s1, проиллюстрированного на фиг. 10, и помимо этого, становится или нет меньше второго порогового значения s2. Другими словами, значение счетчика, ставшее первым пороговым значением s1 или больше, снижается, и после того, как значение счетчика становится меньше первого порогового значения s1, процесс переходит к этапу S129, когда значение счетчика становится вторым пороговым значением s2 или больше. Модуль 34 оценки трехмерных объектов оценивает то, является или нет обнаруженный трехмерный объект объектом, не требующим обнаружения, и модуль 34 оценки трехмерных объектов после этого определяет то, что соседнее транспортное средство не присутствует в соседней полосе движения (этап S129). С другой стороны, после того, как значение счетчика становится меньше первого порогового значения s1, и когда значение счетчика, помимо этого, становится меньше второго порогового значения s2, процесс переходит к этапу S126, оценивается то, что обнаруженный трехмерный объект не является объектом, не требующим обнаружения, посредством модуля 34 оценки трехмерных объектов, и процесс переходит к этапу S127. Когда значение счетчика не становится равным или превышающим первое пороговое значение s1, процесс естественно переходит к этапу S126, когда значение счетчика меньше первого порогового значения s1 и равно второму пороговому значению s2 или больше.
[0062] На этапе S127, модуль 34 оценки трехмерных объектов определяет то, равна или нет скорость движения соседнего транспортного средства 10 км/ч или больше, и равна или нет относительная скорость движения соседнего транспортного средства относительно рассматриваемого транспортного средства +60 км/ч или меньше. Когда оба условия удовлетворяются (этап S127="Да"), модуль 34 оценки трехмерных объектов определяет то, что соседнее транспортное средство присутствует в соседней полосе движения (этап S128). С другой стороны, когда любое одно из условий не удовлетворяется (этап S127="Нет"), модуль 34 оценки трехмерных объектов определяет то, что соседнее транспортное средство не присутствует в соседней полосе движения (этап S115). Процесс затем возвращается к этапу S101, проиллюстрированному на фиг. 13, и повторяет вышеописанную обработку.
[0063] В настоящем варианте осуществления, области A1, A2 обнаружения являются направлениями задних сторон относительно рассматриваемого транспортного средства, и следует сфокусироваться на том, может или нет рассматриваемое транспортное средство контактировать с соседним транспортным средством, если должна быть выполнена смена полосы движения. Соответственно, реализуется процесс этапа S127. Другими словами, при условии, что система в настоящем варианте осуществления активируется на скоростной автомагистрали, когда скорость соседнего транспортного средства меньше 10 км/ч, это редко представляет собой проблему, даже если соседнее транспортное средство должно присутствовать, поскольку соседнее транспортное средство размещается далеко позади рассматриваемого транспортного средства, когда выполняется смена полосы движения. Аналогично, когда относительная скорость движения соседнего транспортного средства превышает +60 км/ч относительно рассматриваемого транспортного средства (т.е. когда соседнее транспортное средство движется со скоростью, на 60 км/ч превышающей скорость рассматриваемого транспортного средства), это редко представляет собой проблему, поскольку соседнее транспортное средство должно размещаться перед рассматриваемым транспортным средством, когда выполняется смена полосы движения. Соответственно, можно истолковать так, что соседнее транспортное средство, которое представляет собой проблему, если должна выполняться смена полосы движения, определяется на этапе S127.
[0064] На этапе S127, определяется то, равна или нет абсолютная скорость движения соседнего транспортного средства 10 км/ч или больше, и равна или нет относительная скорость движения соседнего транспортного средства относительно рассматриваемого транспортного средства +60 км/ч или меньше, за счет этого получая следующее преимущество. Например, возможный случай заключается в том, что абсолютная скорость движения стационарного объекта обнаруживается равной нескольким километров в час в зависимости от ошибки крепления камеры 10. Соответственно, определение того, равна или нет скорость 10 км/ч или больше, позволяет уменьшать вероятность того, что стационарный объект определяется в качестве соседнего транспортного средства. Кроме того, возможно то, что относительная скорость соседнего транспортного средства относительно рассматриваемого транспортного средства обнаруживается как большая +60 км/ вследствие шума. Соответственно, определение того, равна или нет относительная скорость +60 км/ч или меньше, позволяет уменьшать вероятность ошибочного обнаружения вследствие шума.
[0065] Вместо обработки на этапе S127, может быть определено то, что абсолютная скорость движения соседнего транспортного средства не является отрицательным значением или не составляет 0 км/ч. Кроме того, в настоящем варианте осуществления, поскольку следует сфокусироваться на том, имеется или нет вероятность того, что произойдет контакт, если рассматриваемое транспортное средство собирается осуществлять смену полосы движения, предупреждающий звук может быть выдан водителю рассматриваемого транспортного средства, или экран, соответствующий предупреждению, может предоставляться посредством предварительно определенного устройства отображения, когда соседнее транспортное средство обнаружено на этапе S128.
[0066] Таким образом, в первом варианте осуществления, два изображения, полученных в различные моменты времени, преобразуются в изображения вида "с высоты птичьего полета", и разностное изображение PDt формируется на основе разности между изображениями вида "с высоты птичьего полета". Число пикселов, которые указывают предварительно определенную разность, подсчитывается вдоль направления, в котором трехмерный объект сжимается вследствие преобразования точки обзора, и формируется частотное распределение, чтобы за счет этого формировать форму DWt разностного сигнала из данных разностного изображения PDt. Кроме того, трехмерный объект обнаруживается на основе сформированной формы DWt разностного сигнала, и оценивается то, представляет собой или нет обнаруженный трехмерный объект придорожные посадки, снег, дорожное ограждение или другой объект, не требующий обнаружения, на основе абсолютного значения |ΔV| величины изменения во времени относительной скорости движения обнаруженного трехмерного объекта. В этом случае, например, прерывистые компоненты краев имеют тенденцию обнаруживаться в значительном числе, когда захваченное изображение, в котором захвачены придорожные посадки, снег, дорожные ограждения или другие объекты, не требующие обнаружения, подвергается обработке краев. Это обусловлено тем фактом, что информация изображений объектов, не требующих обнаружения, зачастую имеет большую величину изменчивости информации изображений. Соответственно, в настоящем варианте осуществления, абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта обнаруживается в качестве величины изменчивости в информации изображений, и определение трехмерного объекта в качестве объекта, не требующего обнаружения, соразмерно абсолютной величине обнаруженного абсолютного значения |ΔV| дает возможность надлежащего обнаружения придорожных посадок, снега, дорожных ограждений или других объектов, не требующих обнаружения, и в силу этого позволяет эффективно предотвращать ошибочное обнаружение объекта, не требующего обнаружения, в качестве соседнего транспортного средства.
[0067] Наоборот, в настоящем варианте осуществления, определяется то, что вероятность того, что обнаруженный трехмерный объект является транспортным средством, является более высокой соразмерно более низкому абсолютному значению |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта, и как результат, обнаруженный трехмерный объект проще определяется в качестве другого транспортного средства, и, следовательно, трехмерный объект может обнаруживаться надлежащим образом.
[0068] Кроме того, в настоящем варианте осуществления, когда абсолютное значение |ΔV| величины изменения относительной скорости движения трехмерного объекта является высоким, значение счетчика увеличивается, и когда кумулятивное значение счетчика достигает первого порогового значения s1 или больше, обнаруженный трехмерный объект оценивается в качестве объекта, не требующего обнаружения, за счет этого обеспечивая возможность повышения точности обнаружения объекта, не требующего обнаружения. Аналогично, даже после того, как значение счетчика достигает первого порогового значения s1, трехмерный объект оценивается в качестве объекта, не требующего обнаружения, до тех пор, пока значение счетчика не будет меньше второго порогового значения s2, и когда значение счетчика становится меньше второго порогового значения s2, оценивается то, что трехмерный объект не является объектом, не требующим обнаружения, за счет этого обеспечивая возможность повышения точности обнаружения объекта, не требующего обнаружения.
[0069] Вариант 2 осуществления
Далее описывается устройство 1a обнаружения трехмерных объектов согласно второму варианту осуществления. Устройство 1a обнаружения трехмерных объектов согласно второму варианту осуществления является идентичным первому варианту осуществления, за исключением того, что компьютер 30a предоставляется вместо компьютера 30 первого варианта осуществления, как проиллюстрировано на фиг. 14, и работа является такой, как описано ниже. Здесь, фиг. 14 является блок-схемой, иллюстрирующей части компьютера 30a согласно второму варианту осуществления.
[0070] Устройство 1a обнаружения трехмерных объектов согласно второму варианту осуществления снабжено камерой 10 и компьютером 30a, как проиллюстрировано на фиг. 14. Компьютер 30a снабжен модулем 31 преобразования точки обзора, модулем 34 вычисления яркостного различия, модулем 35 обнаружения линий краев, модулем 33a обнаружения трехмерных объектов и модулем 34a оценки трехмерных объектов. Ниже описывается конфигурация устройства 1a обнаружения трехмерных объектов согласно второму варианту осуществления.
[0071] Фиг. 15 является видом, иллюстрирующим диапазон изображений камеры 10 на фиг. 14, фиг. 15(a) является видом сверху, а фиг. 15(b) является видом в перспективе в реальном пространстве позади рассматриваемого транспортного средства V1. Камера 10 устанавливается под предварительно определенным углом a обзора, и задняя сторона относительно рассматриваемого транспортного средства V1, включенная в предварительно определенный угол a обзора, захватывается так, как проиллюстрировано на фиг. 15(a). Угол a обзора камеры 10 задается таким образом, что соседние полосы движения включаются в захватываемый диапазон камеры 10 в дополнение к полосе движения, в которой движется рассматриваемое транспортное средство V1, способом, идентичным способу, проиллюстрированному на фиг. 2.
[0072] Области A1, A2 обнаружения в настоящем примере являются трапецеидальными при виде сверху (в состоянии вида "с высоты птичьего полета"), позиция, размер и форма областей A1, A2 обнаружения определяются на основе расстояний d1-d4. Области A1, A2 обнаружения примера, проиллюстрированного на чертеже, не ограничены трапецеидальной формой и также могут иметь прямоугольную или другую форму в состоянии вида "с высоты птичьего полета", как проиллюстрировано на фиг. 2.
[0073] Здесь, расстояние d1 является расстоянием от рассматриваемого транспортного средства V1 до линий L1, L2 пересечения с землей. Линии L1, L2 пересечения с землей означают линию, в которой трехмерный объект, который присутствует в полосе движения, соседней с полосой движения, в которой движется рассматриваемое транспортное средство V1, контактирует с землей. В настоящем варианте осуществления, цель заключается в том, чтобы обнаруживать соседнее транспортное средство V2 и т.п. (включающее в себя двухколесные транспортные средства и т.п.), движущееся в левой или правой полосе движения позади рассматриваемого транспортного средства V1 и соседней с полосой движения рассматриваемого транспортного средства V1. Соответственно, расстояние d1, которое представляет собой позицию линий L1, L2 пересечения с землей соседнего транспортного средства V2, может определяться как практически фиксированное из расстояния d11 от рассматриваемого транспортного средства V1 до белой линии W дорожной разметки и расстояния d12 от белой линии W дорожной разметки до позиции, в которой прогнозируется движение соседнего транспортного средства V2.
[0074] Расстояние d1 не ограничивается фиксированным заданием и может быть переменным. В этом случае, компьютер 30a распознает позицию белой линии W дорожной разметки относительно рассматриваемого транспортного средства V1 с использованием распознавания белых линий дорожной разметки или другой технологии, и расстояние d11 определяется на основе позиции распознанной белой линии W дорожной разметки. Расстояние d1 за счет этого переменно задается с использованием определенного расстояния d11. В настоящем варианте осуществления, описанном ниже, главным образом прогнозируемы позиция, в которой движется соседнее транспортное средство V2 (расстояние d12 от белой линии W дорожной разметки), и позиция, в которой движется рассматриваемое транспортное средство V1 (расстояние d11 от белой линии W дорожной разметки), и расстояние d1 фиксированно определяется.
[0075] Расстояние d2 является расстоянием, идущим из задней концевой части рассматриваемого транспортного средства V1 в направлении продвижения транспортного средства. Расстояние d2 определяется таким образом, что области A1, A2 обнаружения размещаются, по меньшей мере, в пределах угла a обзора камеры 10. В настоящем варианте осуществления, в частности, расстояние d2 задается в контакте с диапазоном, секционированным в пределах угла a обзора. Расстояние d3 указывает длину областей A1, A2 обнаружения в направлении продвижения транспортного средства. Расстояние d3 определяется на основе размера трехмерного объекта, который должен быть обнаружен. В настоящем варианте осуществления, объект, который должен быть обнаружен, представляет собой соседнее транспортное средство V2 и т.п., и, следовательно, расстояние d3 задается равным длине, которая включает в себя соседнее транспортное средство V2.
[0076] Расстояние d4 указывает высоту, которая задана таким образом, что шины соседнего транспортного средства V2 и т.п. включаются в реальное пространство, как проиллюстрировано на фиг. 15(b). В изображении вида "с высоты птичьего полета" расстояние d4 является длиной, проиллюстрированной на фиг. 15(a). Расстояние d4 также может быть длиной, которая не включает в себя полосы движения, следующие соседние с левой и правой соседними полосами движения в изображении вида "с высоты птичьего полета" (т.е. соседние-для-соседних полосы движения на расстоянии в две полосы движения). Это обусловлено тем, что когда включаются полосы движения на расстоянии в две полосы движения от полосы движения рассматриваемого транспортного средства V1, более невозможно отличать, присутствует или нет соседнее транспортное средство V2 в соседних полосах движения слева и справа от полосы движения, в которой движется рассматриваемое транспортное средство V1, или присутствует или нет находящееся в соседней-для-соседней полосе движения транспортное средство в соседней-для-соседней полосе движения на расстоянии в две полосы движения.
[0077] Как описано выше, определяются расстояния d1-d4, и за счет этого определяются позиция, размер и форма областей A1, A2 обнаружения. Более конкретно, позиция верхней стороны b1 областей A1, A2 обнаружения, которые формируют трапецию, определяется посредством расстояния d1. Начальная позиция C1 верхней стороны b1 определяется посредством расстояния d2. Конечная позиция C2 верхней стороны b1 определяется посредством расстояния d3. Боковая сторона b2 областей A1, A2 обнаружения, которые формируют трапецию, определяется посредством прямой линии L3, идущей от камеры 10 к начальной позиции C1. Аналогично, боковая сторона b3 областей A1, A2 обнаружения, которые формируют трапецию, определяется посредством прямой линии L4, идущей от камеры 10 к конечной позиции C2. Позиция нижней стороны b4 областей A1, A2 обнаружения, которые формируют трапецию, определяется посредством расстояния d4. Таким образом, области, окруженные посредством сторон b1-b4, являются областями A1, A2 обнаружения. Области A1, A2 обнаружения являются обычными квадратами (прямоугольниками) в реальном пространстве позади рассматриваемого транспортного средства V1, как проиллюстрировано на фиг. 15(b).
[0078] Возвращаясь к фиг. 14, модуль 31 преобразования точки обзора принимает ввод захваченных данных изображений предварительно определенной области, захваченных посредством камеры 10. Модуль 31 преобразования точки обзора преобразует точку обзора введенных захваченных данных изображений в данные изображений вида "с высоты птичьего полета", которые являются состоянием вида "с высоты птичьего полета". Состояние вида "с высоты птичьего полета" является состоянием просмотра с точки зрения воображаемой камеры, которая смотрит сверху вниз, например, вертикально вниз (или немного наклонена вниз). Преобразование точки обзора может быть выполнено с использованием технологии, описанной, например, в выложенной заявке на патент Японии № 2008-219063.
[0079] Модуль 34 вычисления яркостного различия вычисляет яркостные различия в данных изображений вида "с высоты птичьего полета", которые подвергнуты преобразованию точки обзора посредством модуля 31 преобразования точки обзора, чтобы обнаруживать края трехмерного объекта, включенного в изображение вида "с высоты птичьего полета". Модуль 34 вычисления яркостного различия вычисляет, для каждой из множества позиций вдоль перпендикулярной воображаемой линии, идущей вдоль перпендикулярного направления в реальном пространстве, яркостное различие между двумя пикселами около каждой позиции. Модуль 34 вычисления яркостного различия допускает вычисление яркостного различия посредством способа задания одной перпендикулярной воображаемой линии, идущей в перпендикулярном направлении в реальном пространстве, или способа задания двух перпендикулярных воображаемых линий.
[0080] Ниже описан конкретный способ задания двух перпендикулярных воображаемых линий. Модуль 34 вычисления яркостного различия задает первую перпендикулярную воображаемую линию, которая соответствует сегменту линии, идущему в перпендикулярном направлении в реальном пространстве, и вторую перпендикулярную воображаемую линию, которая отличается от первой перпендикулярной воображаемой линии, и которая соответствует сегменту линии, идущему в перпендикулярном направлении в реальном пространстве. Модуль 34 вычисления яркостного различия определяет яркостное различие между точкой на первой перпендикулярной воображаемой линии и точкой на второй перпендикулярной воображаемой линии непрерывно вдоль первой перпендикулярной воображаемой линии и второй перпендикулярной воображаемой линии. Ниже подробно описывается работа модуля 34 вычисления яркостного различия.
[0081] Модуль 34 вычисления яркостного различия задает первую перпендикулярную воображаемую линию La (ниже называемую "линией La концентрации внимания"), которая соответствует сегменту линии, идущему в перпендикулярном направлении в реальном пространстве, и которая проходит через область A1 обнаружения, как проиллюстрировано на фиг. 16(a). Модуль 35 вычисления яркостного различия задает вторую перпендикулярную воображаемую линию Lr (ниже называемую "опорной линией Lr"), которая отличается от линии La концентрации внимания, соответствует сегменту линии, идущему в перпендикулярном направлении в реальном пространстве, и проходит через область A1 обнаружения. Здесь, опорная линия Lr задается равной позиции на расстоянии от линии La концентрации внимания на предварительно определенное расстояние в реальном пространстве. Линии, которые соответствуют сегментам линии, идущим в перпендикулярном направлении в реальном пространстве, являются линиями, которые расходятся в радиальном направлении от позиции Ps камеры 10 в изображении вида "с высоты птичьего полета". Эти линии, расходящиеся в радиальном направлении, являются линиями, которые следуют направлению сжатия трехмерного объекта при преобразовании в вид "с высоты птичьего полета".
[0082] Модуль 34 вычисления яркостного различия задает точку Pa концентрации внимания на линии La концентрации внимания (точку на первой перпендикулярной воображаемой линии). Модуль 34 вычисления яркостного различия также задает опорную точку Pr на опорной линии Lr (точку на второй перпендикулярной воображаемой линии). Линия La концентрации внимания, точка Pa концентрации внимания, опорная линия Lr и опорная точка Pr имеют взаимосвязь в реальном пространстве, проиллюстрированную на фиг. 16(b). Из фиг. 16(b) очевидно то, что линия La концентрации внимания и опорная линия Lr являются линиями, идущими в перпендикулярном направлении в реальном пространстве, и что точка Pa концентрации внимания и опорная точка Pr являются точками, заданными с практически идентичной высотой в реальном пространстве. Точка Pa концентрации внимания и опорная точка Pr не обязательно должны строго поддерживаться на идентичной высоте, и разрешается определенная величина ошибки, которая позволяет точке Pa концентрации внимания и опорной точке Pr считаться находящимся на идентичной высоте.
[0083] Модуль 34 вычисления яркостного различия определяет яркостное различие между точкой Pa концентрации внимания и опорной точкой Pr. Если яркостное различие между точкой Pa концентрации внимания и опорной точкой Pr является большим, возможно то, что край присутствует между точкой Pa концентрации внимания и опорной точкой Pr. Во втором варианте осуществления, в частности, перпендикулярная воображаемая линия задается в качестве сегмента линии, идущего в перпендикулярном направлении в реальном пространстве относительно изображения вида "с высоты птичьего полета", чтобы обнаруживать трехмерный объект, присутствующий в областях A1, A2 обнаружения. Следовательно, имеется высокая вероятность того, что существует край трехмерного объекта в местоположении, в котором задана линия La концентрации внимания, когда яркостное различие между линией La концентрации внимания и опорной линией Lr является высоким. Соответственно, модуль 35 обнаружения линий краев, проиллюстрированный на фиг. 14, обнаруживает линию края на основе яркостного различия между точкой Pa концентрации внимания и опорной точкой Pr.
[0084] Этот аспект описывается подробнее. Фиг. 17 является видом для описания подробной работы модуля 35 вычисления яркостного различия. Фиг. 17(a) иллюстрирует изображение вида "с высоты птичьего полета" состояния вида "с высоты птичьего полета", а фиг. 17(b) является укрупненным видом изображения вида "с высоты птичьего полета", проиллюстрированного на фиг. 17(a). На фиг. 17, проиллюстрирована и описана только область A1 обнаружения, но яркостное различие вычисляется с использованием идентичной процедуры для области A2 обнаружения.
[0085] Когда соседнее транспортное средство V2 отображается в захваченном изображении, захваченном посредством камеры 10, соседнее транспортное средство V2 появляется в области A1 обнаружения в изображении вида "с высоты птичьего полета", как проиллюстрировано на фиг. 17(a). Линия La концентрации внимания задается на резиновом участке шины соседнего транспортного средства V2 в изображении вида "с высоты птичьего полета" на фиг. 17(b), как проиллюстрировано в укрупненном виде области B1 на фиг. 17(a). В этом состоянии, сначала модуль 35 вычисления яркостного различия задает опорную линию Lr. Опорная линия Lr задается вдоль перпендикулярного направления в позиции, заданном на предварительно определенном расстоянии в реальном пространстве от линии La концентрации внимания. В частности, в устройстве 1a обнаружения трехмерных объектов согласно настоящему варианту осуществления, опорная линия Lr задается в позиции на расстоянии на расстоянии в 10 см в реальном пространстве от линии La концентрации внимания. Опорная линия Lr за счет этого задается на колесе шины соседнего транспортного средства V2, заданном, например, на расстоянии, которое соответствует 10 см от резины шины соседнего транспортного средства V2 в изображении вида "с высоты птичьего полета".
[0086] Затем, модуль 34 вычисления яркостного различия задает множество точек Pa1-PaN концентрации внимания на линии La концентрации внимания. На фиг. 17(b), шесть точек Pa1-Pa6 концентрации внимания (ниже называемых "точкой Pai концентрации внимания" при указании произвольной точки) задаются для удобства описания. Произвольное число точек Pa концентрации внимания может задаваться на линии La концентрации внимания. В нижеприведенном описании, N точек Pa концентрации внимания задаются на линии La концентрации внимания.
[0087] Модуль 34 вычисления яркостного различия затем задает опорные точки Pr1-PrN таким образом, что они имеют высоту, идентичную высоте точек Pa1-PaN концентрации внимания в реальном пространстве. Модуль 34 вычисления яркостного различия вычисляет яркостное различие между парами из точки Pa концентрации внимания и опорной точки Pr с идентичной высотой. Модуль 34 вычисления яркостного различия за счет этого вычисляет яркостное различие между двумя пикселами для каждой из множества позиций (1-N) вдоль перпендикулярной воображаемой линии, идущей в перпендикулярном направлении в реальном пространстве. Модуль 34 вычисления яркостного различия вычисляет яркостное различие, например, между первой точкой Pa1 концентрации внимания и первой опорной точкой Pr1 и вычисляет яркостное различие между второй точкой Pa2 концентрации внимания и второй опорной точкой Pr2. Модуль 34 вычисления яркостного различия за счет этого определяет яркостное различие непрерывно вдоль линии La концентрации внимания и опорной линии Lr. Другими словами, модуль 34 вычисления яркостного различия последовательно определяет яркостное различие между третьей-N-й точками Pa3-PaN концентрации внимания и третьей-N-й опорными точками Pr3-PrN.
[0088] Модуль 34 вычисления яркостного различия повторяет процесс задания вышеописанной опорной линии Lr, задания точки Pa концентрации внимания, задания опорной точки Pr и вычисления яркостного различия при сдвиге линии La концентрации внимания в области A1 обнаружения. Другими словами, модуль 34 вычисления яркостного различия многократно выполняет вышеописанный процесс при изменении позиций линии La концентрации внимания и опорной линии Lr на идентичное расстояние в реальном пространстве вдоль направления, в котором идет линия L1 пересечения с землей. Модуль 34 вычисления яркостного различия, например, задает линию, которая представляет собой опорную линию Lr в предыдущем процессе, в качестве линии La концентрации внимания, задает опорную линию Lr относительно линии La концентрации внимания и последовательно определяет яркостное различие.
[0089] Таким образом, во втором варианте осуществления, определение яркостного различия из точки Pa концентрации внимания на линии La концентрации внимания и опорной точки Pr на опорной линии Lr, которые имеют практически идентичную высоту в реальном пространстве, дает возможность четкого обнаружения яркостного различия, когда край, идущий в перпендикулярном направлении, присутствует. Точность обнаружения трехмерного объекта может повышаться без влияния на процесс обнаружения трехмерного объекта, даже когда трехмерный объект укрупнен в соответствии с высотой от поверхности дороги посредством преобразования в изображение вида "с высоты птичьего полета", чтобы сравнивать яркость между перпендикулярными воображаемыми линиями, идущими в перпендикулярном направлении в реальном пространстве.
[0090] Возвращаясь к фиг. 14, модуль 35 обнаружения линий краев обнаруживает линию края из непрерывного яркостного различия, вычисленного посредством модуля 34 вычисления яркостного различия. Например, в случае, проиллюстрированном на фиг. 17(b), первая точка Pa1 концентрации внимания и первая опорная точка Pr1 размещаются в идентичном участке шины, и, следовательно, яркостное различие является небольшим. С другой стороны, вторая-шестая точки Pa2-Pa6 концентрации внимания размещаются в резиновых участках шины, и вторая-шестая опорные точки Pr2-Pr6 размещаются в участке колеса шины. Следовательно, яркостное различие между второй-шестой точками Pa2-Pa6 концентрации внимания и второй-шестой опорными точками Pr2-Pr6 является большим. Соответственно, модуль 35 обнаружения линий краев способен к обнаружению того, что край присутствует между второй-шестой точками Pa2-Pa6 концентрации внимания и второй-шестой опорными точками Pr2-Pr6, где яркостное различие является высоким.
[0091] В частности, когда линия края должна быть обнаружена, модуль 35 обнаружения линий краев сначала назначает атрибут i-й точке Pai концентрации внимания из яркостного различия между i-й точкой Pai концентрации внимания (координаты (xi, yi)) и i-й опорной точкой Pri (координаты (xiʹ, yiʹ)) в соответствии с формулой 1, приведенной ниже.
[формула 1]
s(xi, yi)=1,
когда I(xi, yi)>I(xiʹ, yiʹ)+t
s(xi, yi)=-1,
когда I(xi, yi)<I(xiʹ, yiʹ)-t
s(xi, yi)=0,
когда вышеуказанное не справедливо.
[0092] В вышеприведенной формуле 1, t представляет предварительно определенное пороговое значение, I(xi, yi) представляет значение яркости i-й точки Pai концентрации внимания, и I(xiʹ, yiʹ) представляет значение яркости i-й опорной точки Pri. В соответствии с формулой 1, атрибут s(xi, yi) точки Pai концентрации внимания равен 1, когда значение яркости точки Pai концентрации внимания превышает значение яркости, полученное посредством прибавления порогового значения t к опорной точке Pri. С другой стороны, атрибут s(xi, yi) точки Pai концентрации внимания равен -1, когда значение яркости точки Pai концентрации внимания меньше значения яркости, полученного посредством вычитания порогового значения t из опорной точки Pri. Атрибут s(xi, yi) точки Pai концентрации внимания равен 0, когда значение яркости точки Pai концентрации внимания и значение яркости опорной точки Pri находятся во взаимосвязи, отличной от вышеизложенной взаимосвязи.
[0093] Затем, модуль 35 обнаружения линий краев оценивает то, является или нет линия La концентрации внимания линией края, из неразрывности c(xi, yi) атрибута s вдоль линии La концентрации внимания, на основе следующей формулы 2.
[формула 2]
c(xi, yi)=1,
когда s(xi, yi)=s(xi+1, yi+1) (за исключением 0=0)
c(xi, yi)=0,
когда вышеуказанное не справедливо.
[0094] Неразрывность c(xi, yi) равна 1, когда атрибут s(xi, yi) точки Pai концентрации внимания и атрибут s(xi+1, yi+1) соседней точки Pai+1 концентрации внимания являются идентичными. Неразрывность c(xi, yi) равна 0, когда атрибут s(xi, yi) точки Pai концентрации внимания и атрибут s(xi+1, yi+1) соседней точки Pai+1 концентрации внимания не являются идентичными.
[0095] Затем, модуль 35 обнаружения линий краев определяет сумму неразрывностей c всех точек Pa концентрации внимания на линии La концентрации внимания. Модуль 35 обнаружения линий краев делит сумму неразрывностей c, определенных таким способом, на число N точек Pa концентрации внимания, чтобы за счет этого нормализовать неразрывность c. Модуль 35 обнаружения линий краев определяет линию La концентрации внимания в качестве линии края, когда нормализованное значение превышает пороговое значение θ. Пороговое значение θ задается заранее посредством экспериментирования или другого средства.
[0096] Другими словами, модуль 35 обнаружения линий краев определяет то, является или нет линия La концентрации внимания линией края, на основе формулы 3, приведенной ниже. Модуль 35 обнаружения линий краев затем определяет то, являются или нет все линии La концентрации внимания, нарисованные в области A1 обнаружения, линиями краев.
[формула 3]
Σc(xi, yi)/N>θ
[0097] Таким образом, во втором варианте осуществления, атрибут назначается точке Pa концентрации внимания на основе яркостного различия между точкой Pa концентрации внимания на линии La концентрации внимания и опорной точкой Pr на опорной линии Lr, и определяется то, является или нет линия La концентрации внимания линией края, на основе неразрывности c атрибутов вдоль линии La концентрации внимания. Следовательно, границы между областями, имеющими высокую яркость, и областями, имеющими низкую яркость, обнаруживаются в качестве линий краев, и края могут быть обнаружены в соответствии с естественными ощущениями человека. Ниже описываются результаты вышеуказанного. Фиг. 18 является видом, иллюстрирующим пример изображения для описания обработки модуля 36 обнаружения линий краев. Этот пример изображения является изображением, в котором первый шаблон 101 линий и второй шаблон 102 линий являются соседними друг с другом, при этом первый шаблон 101 линий указывает шаблон линий, в котором повторяются области с высокой яркостью и области с низкой яркостью, а второй шаблон 102 линий указывает шаблон линий, в котором повторяются области с низкой яркостью и области с высокой яркостью. Кроме того, в этом примере изображения области первого шаблона 101 линий, в которых яркость является высокой, и области второго шаблона 102 линий, в которых яркость является низкой, являются соседними друг с другом, и области первого шаблона 101 линий, в которых яркость является низкой, и области второго шаблона 102 линий, в которых яркость является высокой, являются соседними друг с другом. Местоположение 103, размещаемое на границе между первым шаблоном 101 линий и вторым шаблоном 102 линий, имеет тенденцию не восприниматься как край посредством органов чувств человека.
[0098] Напротив, поскольку области с низкой яркостью и области с высокой яркостью являются соседними друг с другом, местоположение 103 распознается в качестве края, когда край обнаруживается только посредством яркостного различия. Тем не менее, модуль 35 обнаружения линий краев оценивает местоположение 103 в качестве линии края только тогда, когда существует неразрывность в атрибутах яркостного различия. Следовательно, модуль 35 обнаружения линий краев способен к подавлению ошибочной оценки, при которой местоположение 103, которое не распознается в качестве линии края посредством органов чувств человека, распознается в качестве линии края, и края могут быть обнаружены в соответствии с органами чувств человека.
[0099] Возвращаясь к фиг. 14, модуль 33a обнаружения трехмерных объектов обнаруживает трехмерный объект на основе числа линий краев, обнаруженных посредством модуля 35 обнаружения линий краев. Как описано выше, устройство 1a обнаружения трехмерных объектов согласно настоящему варианту осуществления обнаруживает линию краев, идущую в вертикальном направлении в реальном пространстве. Обнаружение множества линий краев, идущих в перпендикулярном направлении, указывает, что имеется высокая вероятность того, что трехмерный объект присутствует в областях A1, A2 обнаружения. Соответственно, модуль 33a обнаружения трехмерных объектов обнаруживает трехмерный объект на основе числа линий краев, обнаруженных посредством модуля 35 обнаружения линий краев. В частности, модуль 33a обнаружения трехмерных объектов определяет то, составляет или нет число линий краев, обнаруженных посредством модуля 35 обнаружения линий краев, предварительно определенное пороговое значение β или больше, и когда число линий краев составляет предварительно определенное пороговое значение β или больше, линии краев, обнаруженные посредством модуля 35 обнаружения линий краев, определяются в качестве линий краев трехмерного объекта.
[0100] Кроме того, до обнаружения трехмерного объекта, модуль 33a обнаружения трехмерных объектов оценивает то, являются или нет корректными линии краев, обнаруженные посредством модуля 35 обнаружения линий краев. Модуль 33a обнаружения трехмерных объектов оценивает то, равно или нет изменение яркости на линиях краев предварительно определенному пороговому значению tb или больше, вдоль линий краев изображения вида "с высоты птичьего полета". Когда изменение яркости на линиях краев в изображении вида "с высоты птичьего полета" равно предварительно определенному пороговому значению tb или больше, определяется то, что линии краев обнаружены посредством ошибочной оценки. С другой стороны, когда изменение яркости на линиях краев в изображении вида "с высоты птичьего полета" меньше предварительно определенного порогового значения tb, оценивается то, что линии краев являются корректными. Пороговое значение tb задается заранее посредством экспериментирования или другого средства.
[0101] Фиг. 19 является видом, иллюстрирующим распределение яркости на линии края, фиг. 19(a) иллюстрирует линию края и распределение яркости, когда соседнее транспортное средство V2 в качестве трехмерного объекта присутствует в области A1 обнаружения, а фиг. 19(b) иллюстрирует линию края и распределение яркости, когда трехмерный объект не присутствует в области A1 обнаружения.
[0102] Как проиллюстрировано на фиг. 19(a), предполагается, что определено то, что линия La концентрации внимания, заданная на резиновом участке шины соседнего транспортного средства V2, находится на линии края в изображении вида "с высоты птичьего полета". В этом случае, изменение яркости на линии La концентрации внимания в изображении вида "с высоты птичьего полета" является постепенным. Это обусловлено преобразованием изображения, захваченного посредством камеры 10, в точке обзора, в изображение вида "с высоты птичьего полета", в силу чего шина соседнего транспортного средства укрупнена в изображении вида "с высоты птичьего полета". С другой стороны, предполагается, что линия La концентрации внимания, заданная в участке знаков белого цвета "50", нарисованном на поверхности дороги, в изображении вида "с высоты птичьего полета" ошибочно оценивается как линия края, как проиллюстрировано на фиг. 19(b). В этом случае, изменение яркости на линии La концентрации внимания в изображении вида "с высоты птичьего полета" имеет значительную неровность. Это обусловлено тем, что дорога и другие участки с низкой яркостью смешиваются с участками с высокой яркостью в знаках белого цвета на линии края.
[0103] Модуль 33a обнаружения трехмерных объектов оценивает то, обнаружена или нет линия края посредством ошибочной оценки, на основе разностей в распределении яркости на линии La концентрации внимания, как описано выше. Например, трехмерный объект, включенный в захваченное изображение, зачастую отображается в укрупненном состоянии в изображении вида "с высоты птичьего полета", когда захваченное изображение, полученное посредством камеры 10, преобразуется в изображение вида "с высоты птичьего полета". Как описано выше, когда шина соседнего транспортного средства укрупнена, изменения яркости изображения вида "с высоты птичьего полета" в укрупненном направлении зачастую являются небольшими, поскольку шина в качестве одного местоположения укрупнена. Напротив, когда символ и т.п., нанесенный на поверхности, дороги ошибочно оценен в качестве линии края, такие области, как участок символов, имеющий высокую яркость, и такие области, как участок поверхности дороги, имеющий низкую яркость, смешанно включаются в изображение вида "с высоты птичьего полета". В таком случае, изменения яркости в укрупненном направлении имеют тенденцию быть больше. Соответственно, модуль 33a обнаружения трехмерных объектов определяет то, что линия края обнаружена посредством ошибочной оценки, когда изменение яркости вдоль линии края имеет предварительно определенное пороговое значение tb или больше, и определяет то, что линия края не вызывается посредством трехмерного объекта. Уменьшение точности обнаружения трехмерного объекта за счет этого подавляется, когда знаки белого цвета, такие как "50" на поверхности дороги, придорожная растительность и т.п., оцениваются в качестве линий краев. С другой стороны, модуль 33a обнаружения трехмерных объектов определяет то, что линия края является линией края трехмерного объекта, и определяет то, что трехмерный объект присутствует, когда изменения яркости вдоль линии края меньше предварительно определенного порогового значения tb.
[0104] В частности, модуль 33a обнаружения трехмерных объектов вычисляет изменение яркости линии края с использованием формулы 4 или 5, приведенной ниже. Изменение яркости линии края соответствует значению оценки в реальном пространстве в перпендикулярном направлении. Формула 4 оценивает распределение яркости с использованием совокупного значения квадрата разности между i-м значением I(xi, yi) яркости и соседним (i+1)-м значением I(xi+1, yi+1) яркости на линии La концентрации внимания. Формула 5 оценивает распределение яркости с использованием совокупного значения абсолютного значения разности между i-м значением I(xi, yi) яркости и соседним (i+1)-м значением I(xi+1, yi+1) яркости на линии La концентрации внимания.
[формула 4]
Значение оценки в перпендикулярном эквивалентном направлении = Σ[{I(xi, yi)-I(xi+1, yi+1)}-2]
[формула 5]
Значение оценки в перпендикулярном эквивалентном направлении = Σ|I(xi, yi)-I(xi+1, yi+1)|
[0105] При использовании формулы 5 ограничения не накладываются, и также можно преобразовывать в двоичную форму атрибут b соседнего значения яркости с использованием порогового значения t2 и затем суммировать преобразованный в двоичную форму атрибут b для всех точек Pa концентрации внимания, аналогично формуле 6, приведенной ниже.
[формула 6]
Значение оценки в перпендикулярном эквивалентном направлении = Σb(xi, yi)
где b(xi, yi)=1, когда |I(xi, yi)-I(xi+1, yi+1)|>t2
и b(xi, yi)=0,
когда вышеуказанное не справедливо.
[0106] Атрибут b(xi, yi) точки Pa(xi, yi) концентрации внимания равен 1, когда абсолютное значение яркостного различия между значением яркости точки Pai концентрации внимания и значением яркости опорной точки Pri превышает пороговое значение t2. Когда вышеуказанная взаимосвязь не справедлива, атрибут b(xi, yi) точки Pai концентрации внимания равен 0. Пороговое значение t2 задается заранее посредством экспериментирования или другого средства, так что линия La концентрации внимания не оценивается как находящаяся на идентичном трехмерном объекте. Модуль 33a обнаружения трехмерных объектов затем суммирует атрибут b для всех точек Pa концентрации внимания на линии La концентрации внимания и определяет значение оценки в перпендикулярном эквивалентном направлении, чтобы за счет этого оценивать то, вызывается или нет линия края посредством трехмерного объекта, и то, что трехмерный объект присутствует.
[0107] Модуль 34a оценки трехмерных объектов, проиллюстрированный на фиг. 14, аналогично оценивает, на основе величины изменчивости в информации изображений, то, является или нет трехмерный объект, обнаруженный посредством модуля 33 обнаружения трехмерных объектов, другим транспортным средством (соседним транспортным средством), движущимся в соседней полосе движения. В частности, во втором варианте осуществления, модуль 34a оценки трехмерных объектов вычисляет относительную скорость движения трехмерного объекта относительно рассматриваемого транспортного средства на основе информации краев (компонентов краев и другой информации) в изображении вида "с высоты птичьего полета", определяет величину изменчивости в информации изображений на основе величины изменения во времени относительной скорости движения трехмерного объекта и оценивает то, является обнаруженный трехмерный объект объектом, не требующим обнаружения, или соседним транспортным средством. Например, модуль 34a оценки трехмерных объектов определяет то, что величина изменчивости в информации изображений выше соразмерно большему абсолютному значению величины изменения во времени относительной скорости движения трехмерного объекта, и определяет как высокую вероятность того, что обнаруженный трехмерный объект является объектом, не требующим обнаружения. Ниже подробно описывается способ оценки, осуществляемый посредством модуля 34a оценки трехмерных объектов.
[0108] Далее описывается способ обнаружения соседнего транспортного средства согласно второму варианту осуществления. Фиг. 20 является блок-схемой последовательности операций, иллюстрирующей подробности способа обнаружения соседнего транспортного средства согласно второму варианту осуществления. На фиг. 20 для удобства описывается процесс, связанный с областью A1 обнаружения, но идентичный процесс также выполняется для области A2 обнаружения.
[0109] Во-первых, на этапе S201, предварительно определенная область, указываемая посредством угла a обзора и позиции крепления, захватывается посредством камеры 10, и данные изображений для захваченного изображения P, захваченного посредством камеры 10, получаются посредством компьютера 30a. Затем, модуль 31 преобразования точки обзора преобразует точку обзора полученных данных изображений и формирует данные изображений вида "с высоты птичьего полета" на этапе S202.
[0110] Затем, на этапе S203, модуль 34 вычисления яркостного различия задает линию La концентрации внимания на области A1 обнаружения. В это время, модуль 34 вычисления яркостного различия задает линию, соответствующую линии, идущей в перпендикулярном направлении в реальном пространстве, в качестве линии La концентрации внимания. Кроме того, на этапе S204, модуль 34 вычисления яркостного различия также задает опорную линию Lr на области A1 обнаружения. Модуль 34 вычисления яркостного различия задает, в качестве опорной линии Lr, линию, которая соответствует линии, идущей в перпендикулярном направлении в реальном пространстве, при этом линия также отделена предварительно определенным расстоянием в реальном пространстве от линии La концентрации внимания.
[0111] Затем, на этапе S205, модуль 34 вычисления яркостного различия задает множество точек концентрации внимания на линии La концентрации внимания. При этом модуль 34 вычисления яркостного различия задает определенное число точек Pa концентрации внимания, которые не являются проблематичными во время обнаружения краев посредством модуля 35 обнаружения линий краев. Кроме того, на этапе S206, модуль 34 вычисления яркостного различия задает опорные точки Pr так, что точки Pa концентрации внимания и опорные точки Pr имеют практически идентичную высоту в реальном пространстве. Точки Pa концентрации внимания и опорные точки Pr за счет этого выстраиваются в ряд практически в горизонтальном направлении, и линия края, идущая в перпендикулярном направлении в реальном пространстве, проще обнаруживается.
[0112] Затем, на этапе S207, модуль 34 вычисления яркостного различия вычисляет яркостное различие между точками Pa концентрации внимания и опорными точками Pr с идентичной высотой в реальном пространстве. Модуль 35 обнаружения линий краев вычисляет атрибут s точек Pa концентрации внимания в соответствии с формулой 1, описанной выше. Кроме того, на этапе S208, модуль 35 обнаружения линий краев затем вычисляет неразрывность c атрибута s точек Pa концентрации внимания в соответствии с формулой 3. На этапе S209, модуль 35 обнаружения линий краев оценивает то, превышает или нет значение, полученное посредством нормализации суммы неразрывности c, пороговое значение θ в соответствии с формулой 4. Когда определено то, что нормализованное значение превышает пороговое значение θ (этап S209="Да"), модуль 35 обнаружения линий краев обнаруживает линию La концентрации внимания в качестве линии края на этапе S210. После этого процесс переходит к этапу S211. Когда определено то, что нормализованное значение не превышает пороговое значение θ (этап S209="Нет"), модуль 35 обнаружения линий краев не обнаруживает то, что линия La концентрации внимания является линией края, и процесс переходит к этапу S211.
[0113] На этапе S211, компьютер 30a определяет то, выполнены или нет процессы этапов S203-S210 для всех линий La концентрации внимания, которые могут задаваться в области A1 обнаружения. Когда определено то, что вышеуказанные процессы не выполнены для всех линий La концентрации внимания (этап S211="Нет"), процесс возвращается к этапу S203, задает новую линию La концентрации внимания, и повторяется процесс через этап S211. С другой стороны, когда определено то, что процессы выполнены для всех линий La концентрации внимания (этап S211="Да"), процесс переходит к этапу S212.
[0114] На этапе S212, модуль 33a обнаружения трехмерных объектов вычисляет изменение яркости вдоль линии края для каждой линии края, обнаруженной на этапе S210. Модуль 33a обнаружения трехмерных объектов вычисляет изменение яркости линий краев в соответствии с любой из формул 4, 5 и 6. Затем, на этапе S213, модуль 33a обнаружения трехмерных объектов исключает, из числа линий краев, линии краев, в которых изменение яркости имеет предварительно определенное пороговое значение tb или больше. Другими словами, когда линия края, имеющая большое изменение яркости, не оценивается в качестве корректной линии края, линия края не используется для обнаружения трехмерного объекта. Как описано выше, это осуществляется для того, чтобы подавлять обнаружение знаков на поверхности дороги, придорожной растительности и т.п., включенных в область A1 обнаружения в качестве линий краев. Следовательно, предварительно определенное пороговое значение tb определяется посредством экспериментирования или другого средства заранее и задается на основе изменения яркости, которое возникает вследствие знаков на поверхности дороги, придорожной растительности и т.п. С другой стороны, модуль 33a обнаружения трехмерных объектов определяет линию края, имеющую изменение яркости, которое меньше предварительно определенного порогового значения tb, в качестве линии края трехмерного объекта и за счет этого обнаруживает трехмерный объект, представленный в соседней полосе движения.
[0115] Затем, на этапе S214, посредством модуля 33a обнаружения трехмерных объектов определяется то, имеет или нет число линий краев пороговое значение β или выше. При использовании в данном документе, пороговое значение β является значением, полученным и заданным посредством экспериментирования заранее, и когда, например, четырехколесное транспортное средство задано в качестве трехмерного объекта, который должен быть обнаружен, пороговое значение β задается посредством экспериментирования заранее на основе числа линий краев четырехколесного транспортного средства, которые появляются в области A1 обнаружения. Когда оценено то, что число линий краев имеет пороговое значение β или больше (этап S214="Да"), модуль 33a обнаружения трехмерных объектов определяет то, что трехмерный объект присутствует в области A1 обнаружения, и процесс переходит к этапу S215. С другой стороны, когда это оценено то, что число линий краев не имеет пороговое значение β или выше (этап S214="Нет"), модуль 33a обнаружения трехмерных объектов определяет то, что трехмерный объект не присутствует в области A1 обнаружения, процесс переходит к этапу S232 на фиг. 21, и модуль 34a оценки трехмерных объектов оценивает то, что соседнее транспортное средство не присутствует в области A1 обнаружения.
[0116] На этапе S215, относительная скорость движения трехмерного объекта относительно рассматриваемого транспортного средства вычисляется посредством модуля 34a оценки трехмерных объектов. Например, модуль 34a оценки трехмерных объектов подсчитывает число пикселов, в котором обнаружен предварительно определенный компонент края, вдоль направления, в котором трехмерный объект сжимается во время преобразования точки обзора, чтобы формировать частотное распределение из изображения PBt вида "с высоты птичьего полета", посредством чего формируется одномерная форма сигнала края, и относительная скорость движения трехмерного объекта может быть вычислена из разности в форме сигнала края за один момент времени до этого и форме сигнала края в данный момент времени. Процесс затем переходит к этапу S216 на фиг. 21.
[0117] На этапах S216-S232 выполняется обработка, идентичная обработке на этапах S113-S126 и этапах S128-S130 в первом варианте осуществления. Другими словами, модуль 34a оценки трехмерных объектов обнаруживает величину изменения во времени относительной скорости движения трехмерного объекта на основе относительной скорости движения трехмерного объекта, вычисленной на этапе S215, и определяет то, является или нет трехмерный объект объектом, не требующим обнаружения, в соответствии с величиной изменения во времени относительной скорости движения.
[0118] В частности, когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта составляет 30 км/ч или выше (|ΔV|≥30 км/ч (этап S216="Да")), и когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S217="Да"), модуль 34a оценки трехмерных объектов увеличивает значение счетчика на X1 (этап S218), и когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S217="Нет"), увеличивает значение счетчика на X2 (этап S219).
[0119] Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 30 км/ч и 10 км/ч или больше (30 км/ч>|ΔV|≥10 км/ч (этап S220="Да")), модуль 34a оценки трехмерных объектов снижает значение счетчика на Y1 (этап S222), когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S221="Да"), и снижает значение счетчика на Y2 (этап S223), когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S221="Нет").
[0120] Когда абсолютное значение |ΔV| величины изменения во времени относительной скорости движения трехмерного объекта меньше 10 км/ч (10 км/ч>|ΔV| (этап S220="Нет")), модуль 34a оценки трехмерных объектов снижает значение счетчика на Z1 (этап S225), когда яркость области A1 обнаружения имеет предварительно определенное значение или больше (этап S224="Да"), и снижает значение счетчика на Z2 (этап S226), когда яркость области A1 обнаружения меньше предварительно определенного значения (этап S224="Нет").
[0121] Модуль 34a оценки трехмерных объектов определяет то, имеет или нет значение счетчика первое пороговое значение s1 или больше, проиллюстрированное на фиг. 10 (этап S227), оценивает то, что обнаруженный трехмерный объект является объектом, не требующим обнаружения, когда значение счетчика имеет первое пороговое значение s1 или больше (этап S231), и оценивает то, что соседнее транспортное средство не присутствует в соседней полосе движения (этап S232).
[0122] После того, как значение счетчика становится меньше первого порогового значения s1 и равно или превышает второе пороговое значение s2 (этап S227="Нет", этап S228="Нет"), модуль 34a оценки трехмерных объектов оценивает трехмерный объект в качестве объекта, не требующего обнаружения (этап S231), и определяет то, что соседнее транспортное средство не присутствует в соседней полосе движения (этап S232). С другой стороны, когда значение счетчика становится меньше первого порогового значения s1 и после этого становится равным или превышающим второе пороговое значение s2 (этап S227="Нет", этап S228="Да"), оценивается то, что трехмерный объект не является объектом, не требующим обнаружения (этап S229), и определяется то, что соседнее транспортное средство присутствует в соседней полосе движения (этап S230). Процесс затем возвращается к этапу S201 на фиг. 20, и вышеописанная обработка повторяется.
[0123] Таким образом, во втором варианте осуществления, захваченное изображение преобразуется в изображение вида "с высоты птичьего полета", и информация краев трехмерного объекта обнаруживается из изображения преобразованного вида "с высоты птичьего полета". Относительная скорость движения трехмерного объекта обнаруживается из компонентов краев, обнаруженных в изображении вида "с высоты птичьего полета", и оценивается то, представляет собой или нет обнаруженный трехмерный объект придорожные посадки, снег, дорожное ограждение или другой объект, не требующий обнаружения, на основе абсолютного значения |ΔV| величины изменения относительной скорости движения трехмерного объекта. В дополнение к преимуществам первого варианта осуществления, во втором варианте осуществления, за счет этого можно надлежащим образом оценивать то, является или нет обнаруженный трехмерный объект объектом, не требующим обнаружения, на основе информации краев, даже когда соседнее транспортное средство обнаруживается на основе информации краев. Как результат, можно эффективно предотвращать ошибочное обнаружение объекта, не требующего обнаружения, в качестве соседнего транспортного средства.
[0124] Варианты осуществления, описанные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, и не описываются для того, чтобы ограничивать настоящее изобретение. Следовательно, элементы, раскрытые в вышеприведенных вариантах осуществления, имеют намерение включать в себя все конструктивные модификации и эквиваленты, которые попадают в объем настоящего изобретения.
[0125] Например, в вариантах осуществления, описанных выше, в качестве примера приведена конфигурация, в которой объект, не требующий обнаружения, обнаруживается на основе изменчивости |ΔV| в величине изменения относительной скорости движения трехмерного объекта относительно рассматриваемого транспортного средства, но ограничения на это не накладываются, и, например, также можно использовать конфигурацию, в которой объект, не требующий обнаружения, обнаруживается посредством анализа захваченного изображения, захваченного посредством камеры 10, с использованием двумерного анализа текстуры и обнаружения изменчивости в захваченном изображении на основе результатов анализа. Например, можно оценивать то, что трехмерный объект, захваченный в захваченном изображении, является объектом, не требующим обнаружения, когда пикселы, имеющие предварительно определенную разность в концентрации, обнаруживаются в предварительно определенной доле или больше в результате двумерного анализа текстуры захваченного изображения. Альтернативно, также можно использовать конфигурацию, в которой захваченное изображение анализируется посредством быстрого преобразования Фурье, и когда высокочастотные компоненты, имеющие предварительно определенное значение или больше, обнаруживаются в предварительно определенной доле или больше в результате анализа, трехмерный объект, захваченный в захваченном изображении, оценивается в качестве объекта, не требующего обнаружения.
[0126] В вариантах осуществления, описанных выше, в качестве примера приведена конфигурация, в которой, в котором оценивается то, что обнаруженный трехмерный объект не представляет собой соседнее транспортное средство, когда обнаруженный трехмерный объект оценен в качестве объекта, не требующего обнаружения, но ограничения на это не накладываются, и также можно использовать конфигурацию, в которой не оценивается то, является или нет обнаруженный трехмерный объект соседним транспортным средством, когда обнаруженный трехмерный объект оценен в качестве объекта, не требующего обнаружения.
[0127] Дополнительно, в вариантах осуществления, описанных выше, в качестве примера приведена конфигурация, в которой пиксельные значения разностного изображения PDt обнаруживаются как 0 и 1 посредством модуля 32 совмещения, и пикселы, имеющие пиксельное значение 1 в разностном изображении PDt, подсчитываются в качестве разностных пикселов DP посредством модуля 33 обнаружения трехмерных объектов на основе разностного изображения PDt, чтобы за счет этого обнаруживать трехмерный объект, но ограничения не накладываются посредством этой конфигурации, и также можно использовать конфигурацию, в которой модуль 32 совмещения, например, обнаруживает пиксельные значения разностного изображения PDt с использованием абсолютного значения пиксельных значений изображений PBt, PBt-1 вида "с высоты птичьего полета", и модуль 33 обнаружения трехмерных объектов подсчитывает пикселы, которые превышают предварительно определенное разностное пороговое значение, в качестве разностных пикселов DP.
[0128] Кроме того, в вариантах осуществления, описанных выше, захваченное изображение данного момента времени и изображение за один момент времени до этого преобразуется в виды "с высоты птичьего полета", преобразованные виды "с высоты птичьего полета" совмещаются, после этого формируется разностное изображение PDt, и сформированное разностное изображение PDt оценивается вдоль направления сжатия (направления, в котором трехмерный объект сжимается, когда захваченное изображение преобразуется в вид "с высоты птичьего полета"), чтобы формировать форму DWt разностного сигнала, но ограничения на это не накладываются. Например, также можно использовать конфигурацию, в которой только изображение за один момент времени до этого преобразуется в вид "с высоты птичьего полета", преобразованный вид "с высоты птичьего полета" совмещается, затем преобразуется снова в эквивалентное захваченное изображение, разностное изображение формируется с использованием этого изображения и изображения в данный момент времени, и сформированное разностное изображение оценивается вдоль направления, соответствующего направлению сжатия (т.е. направления, полученного посредством преобразования направления сжатия в направление в захваченном изображении), чтобы за счет этого формировать форму DWt разностного сигнала. Другими словами, вид "с высоты птичьего полета" не должен быть явно сформирован как обязательный при условии, что изображение в данный момент времени и изображение за один момент времени до этого совмещаются, разностное изображение PDt формируется из разности между двумя совмещенными изображениями, и разностное изображение PDt может быть оценено вдоль направления сжатия трехмерного объекта, когда разностное изображение PDt преобразуется в вид "с высоты птичьего полета".
[0129] Дополнительно, в вариантах осуществления, описанных выше, скорость рассматриваемого транспортного средства V1 определяется на основе сигнала из датчика 20 скорости, но ограничения на это не накладываются, и также можно использовать конфигурацию, в которой скорость оценивается из множества изображений в различные моменты времени. В этом случае, датчик 20 скорости не требуется, и конфигурация может быть упрощена.
[0130] Камера 10 в вариантах осуществления, описанных выше, соответствует средству захвата изображений настоящего изобретения. Модуль 31 преобразования точки обзора соответствует средству преобразования изображений настоящего изобретения, и модуль 32 совмещения и модуль 33 обнаружения трехмерных объектов соответствуют средству обнаружения трехмерных объектов настоящего изобретения. Модуль 33 обнаружения трехмерных объектов соответствует средству вычисления скорости движения настоящего изобретения, и модуль 34 оценки трехмерных объектов соответствует средству оценки трехмерных объектов, средству оценки объектов, не требующих обнаружения, и средству управления настоящего изобретения.
Список условных обозначений
[0131] 1 - устройство обнаружения трехмерных объектов
10 - камера
20 - датчик скорости
30 - компьютер
31 - модуль преобразования точки обзора
32 - модуль совмещения
33 - модуль обнаружения трехмерных объектов
34 - модуль оценки трехмерных объектов
35 - модуль вычисления яркостного различия
36 - модуль обнаружения линий краев
a - угол обзора
A1, A2 - область обнаружения
CP - точка пересечения
DP - разностные пикселы
DWt, DWtʹ - форма разностного сигнала
DWt1-DWm, DWm+k-DWtn - небольшие области
L1, L2 - линия пересечения с землей
La, Lb - линия в направлении, в котором трехмерный объект сжимается
P - захваченное изображение
PBt - изображение вида "с высоты птичьего полета"
PDt - разностное изображение
V1 - рассматриваемое транспортное средство
V2 - соседнее транспортное средство
V3 - находящееся в соседней-для-соседней полосе движения транспортное средство.
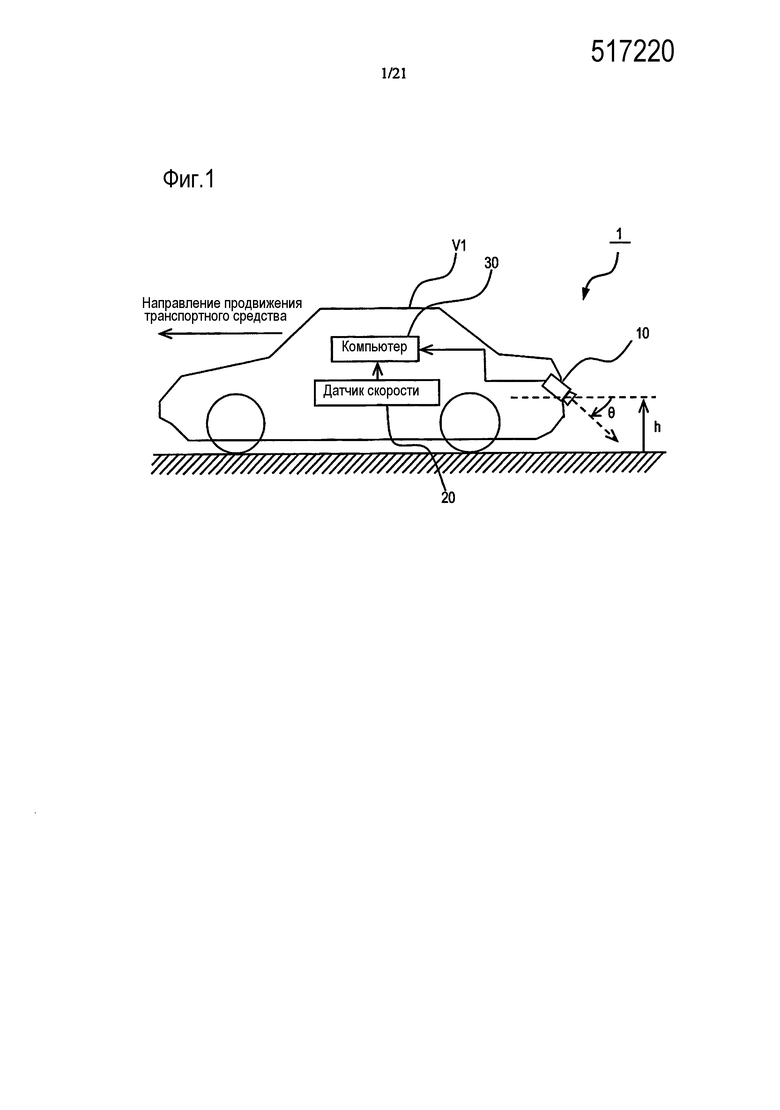
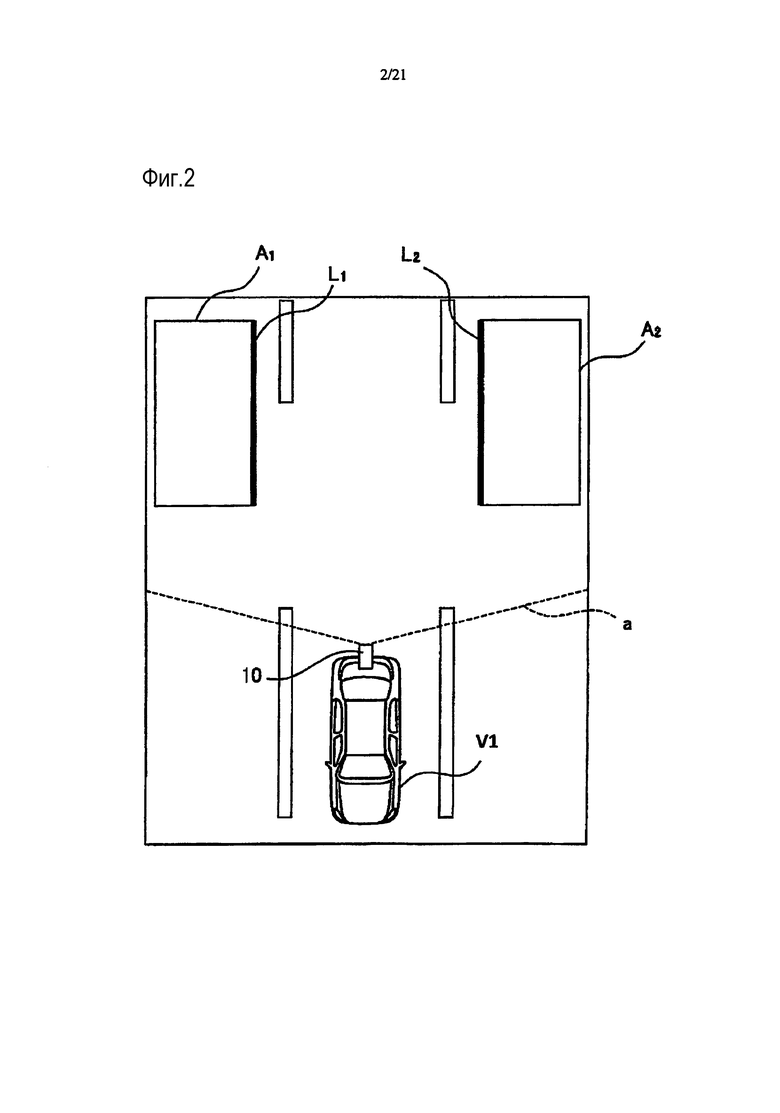
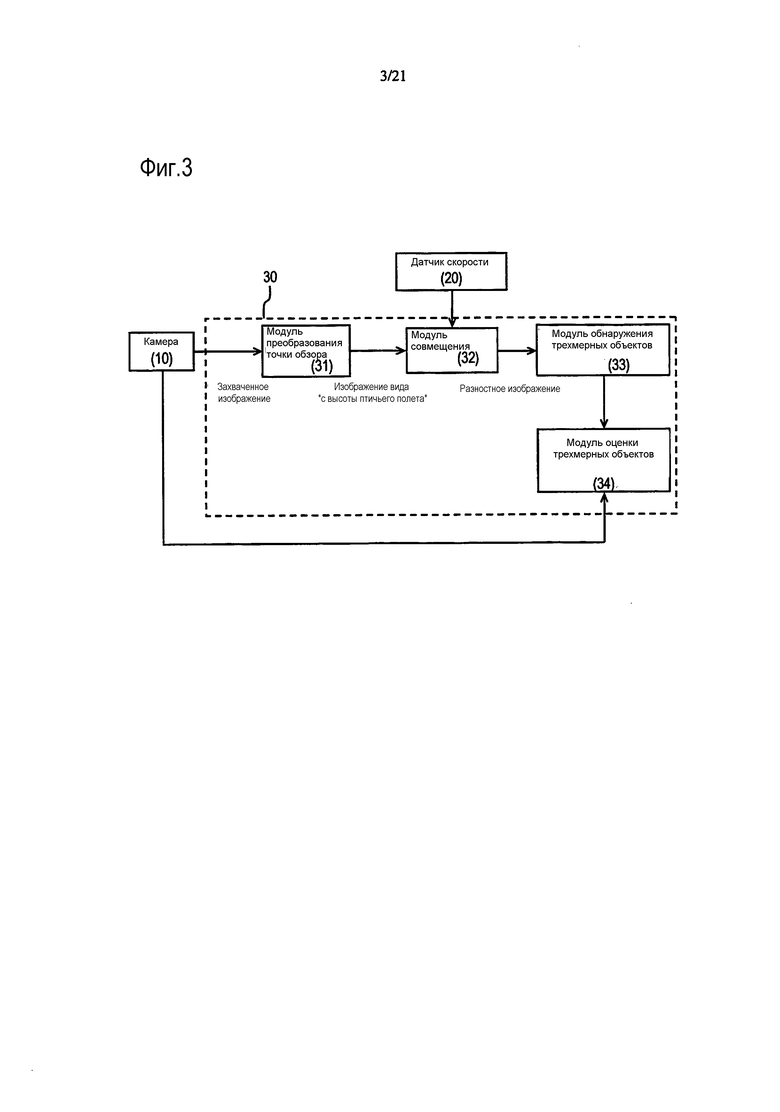
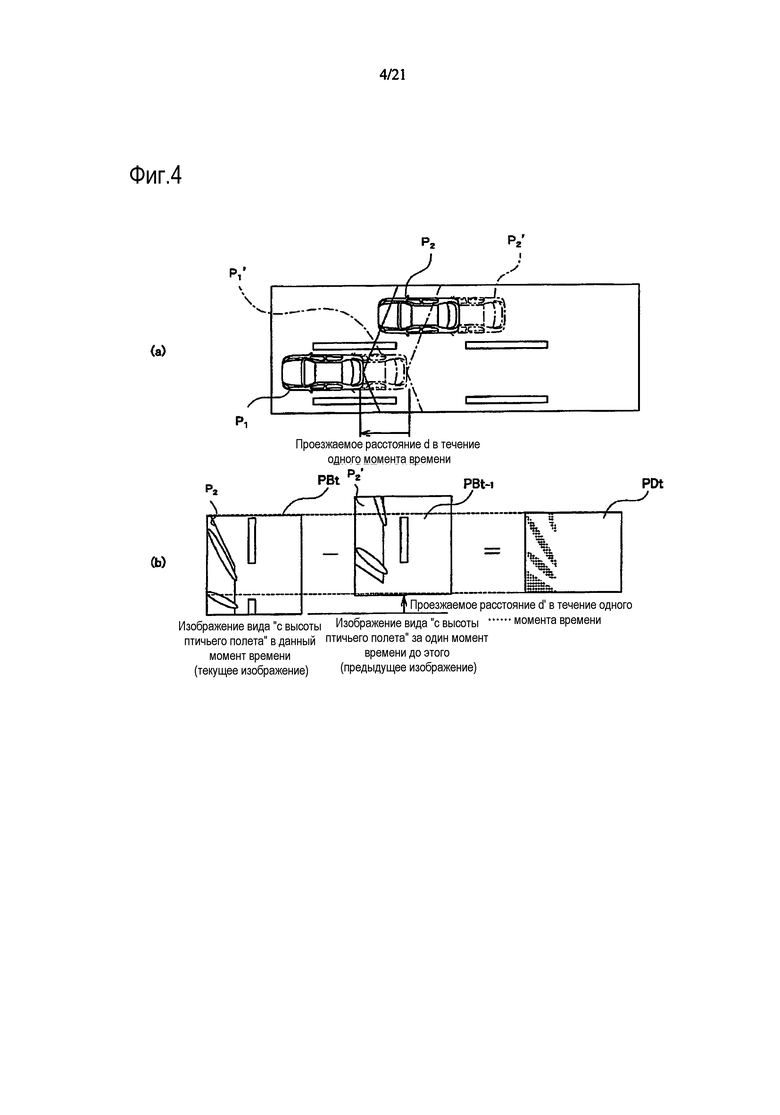
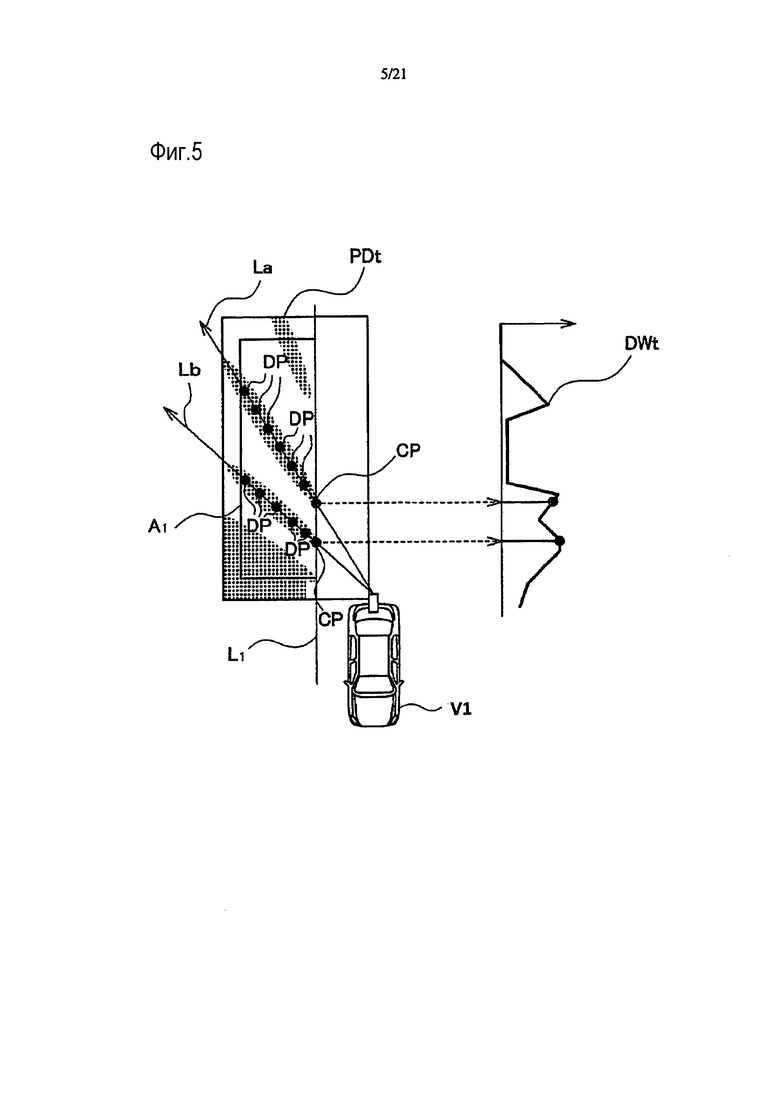
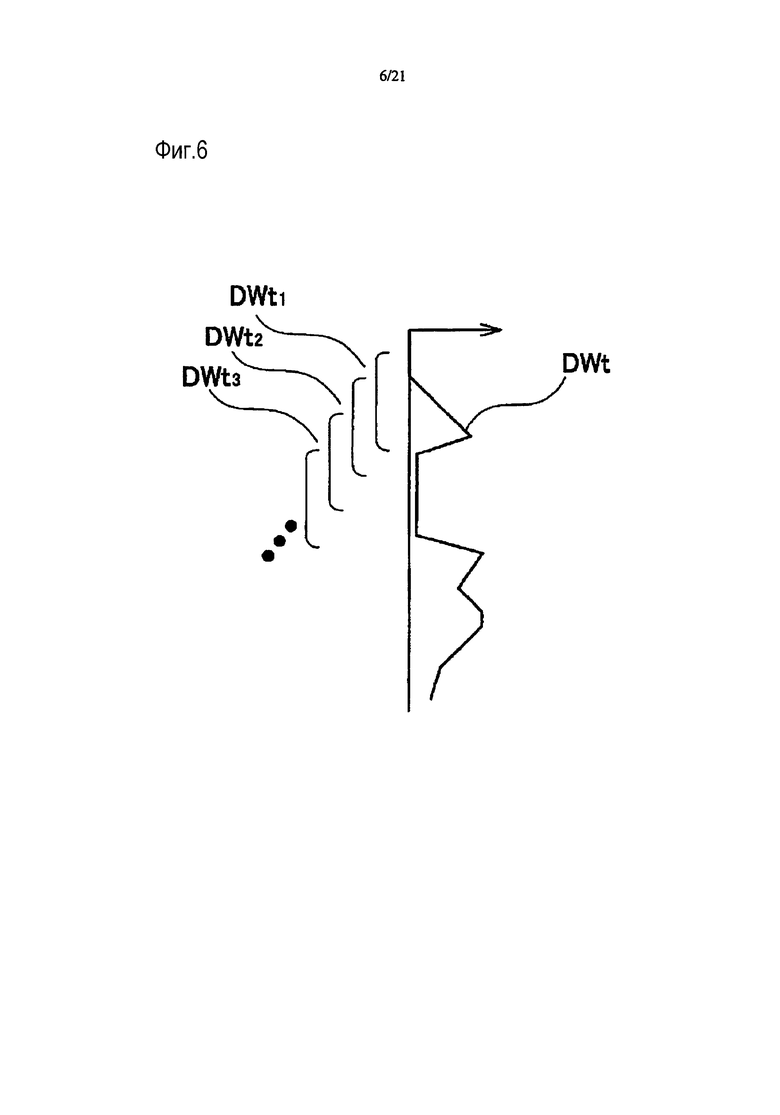
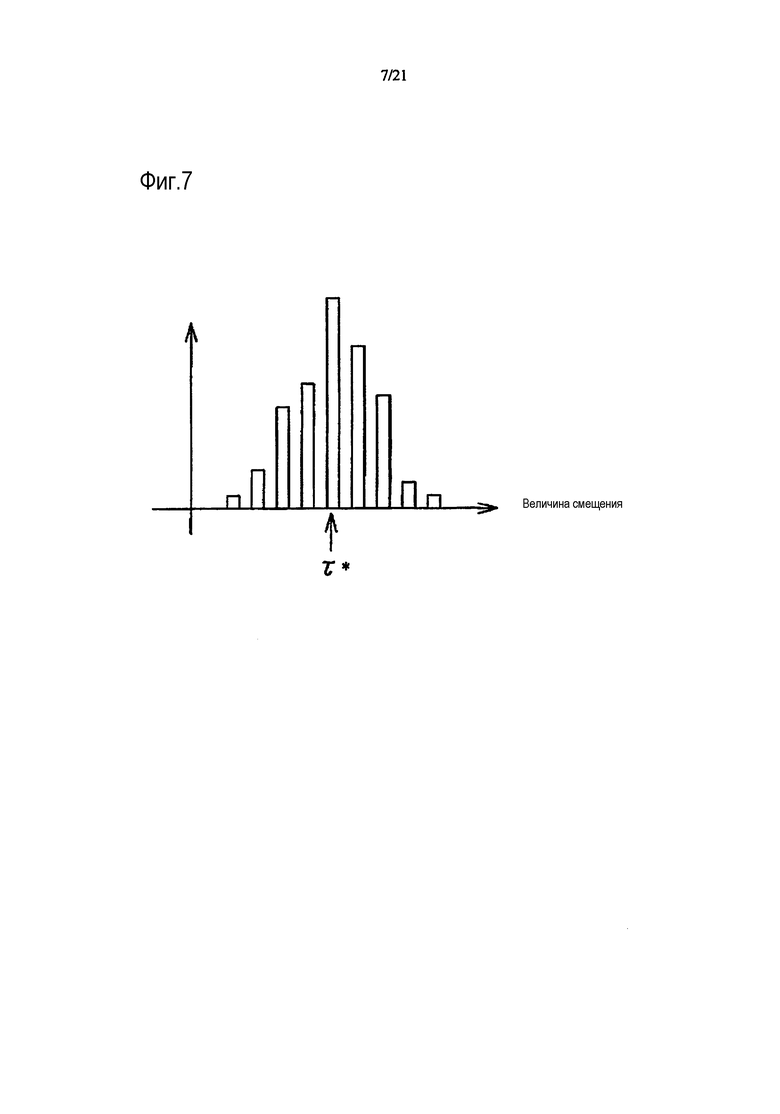
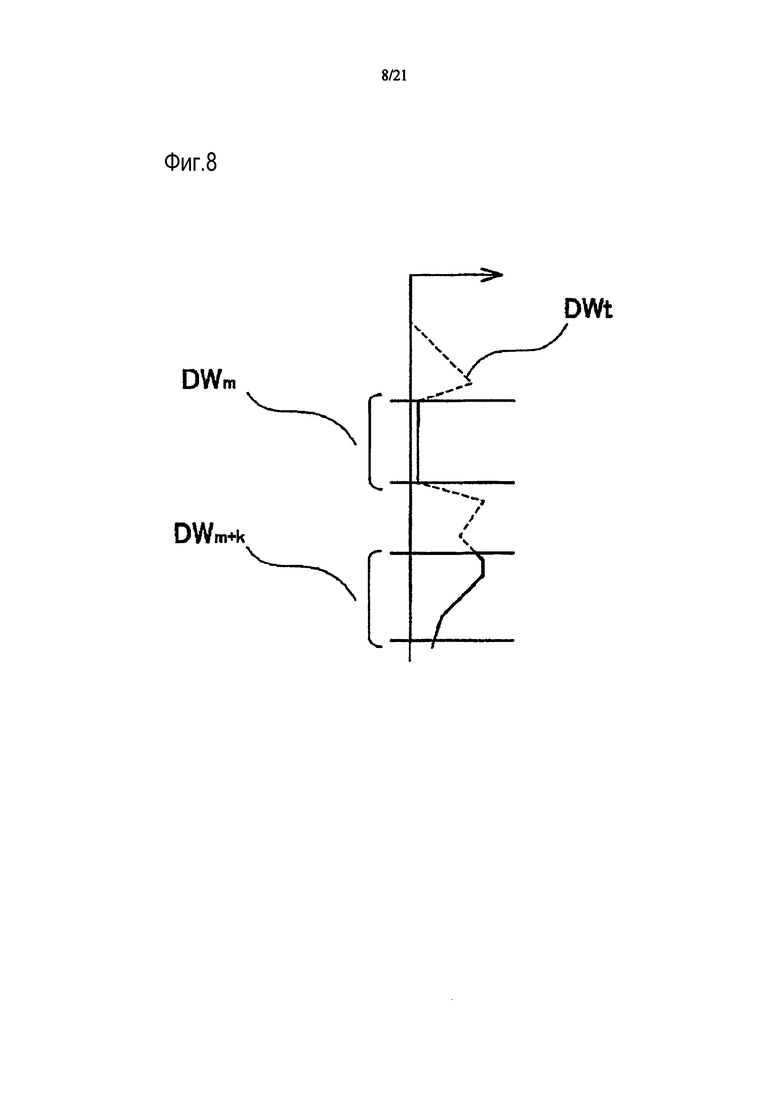
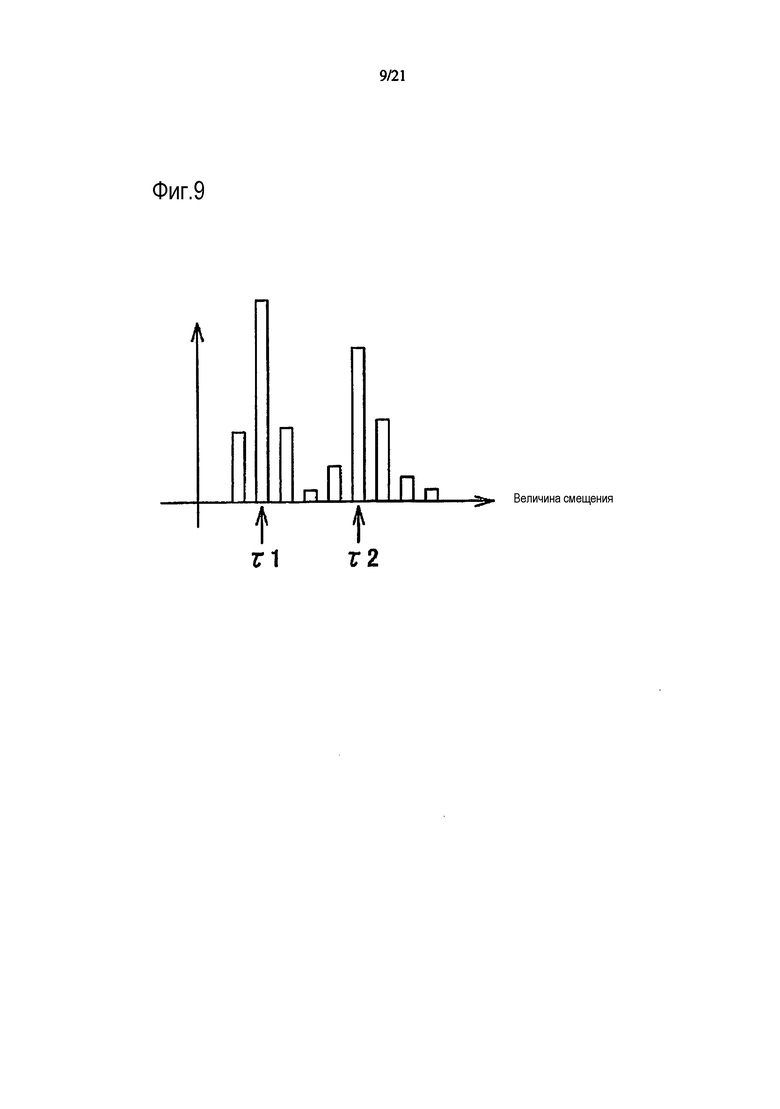
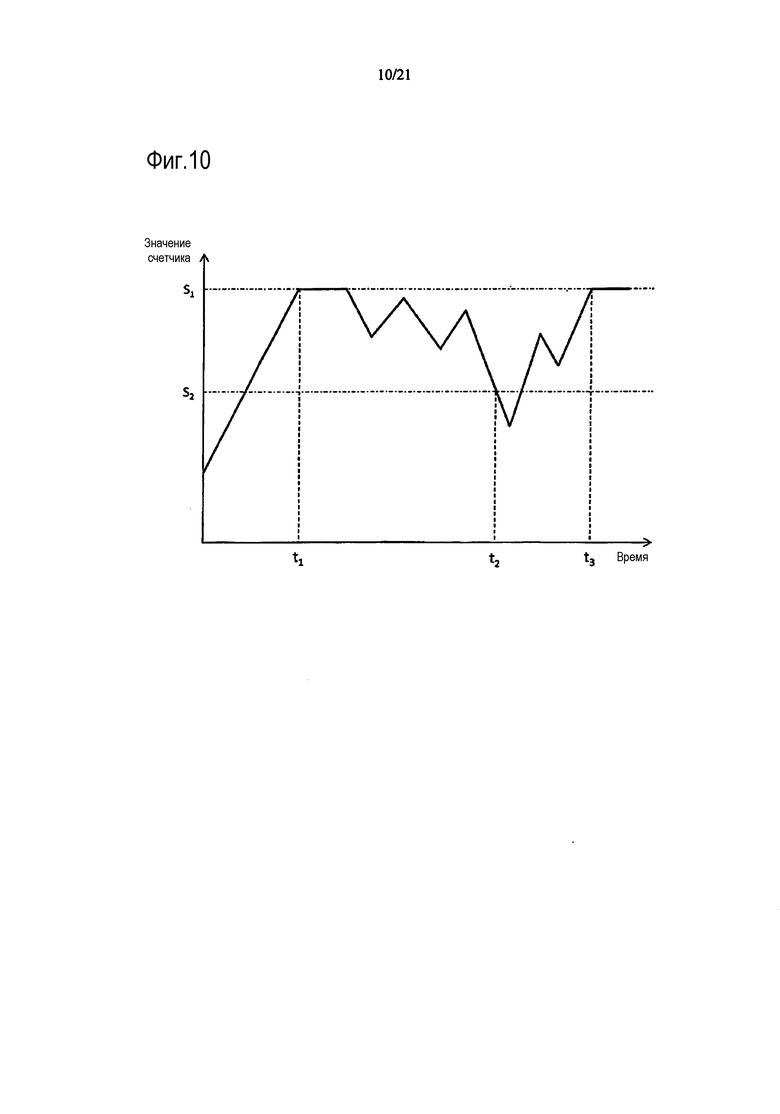
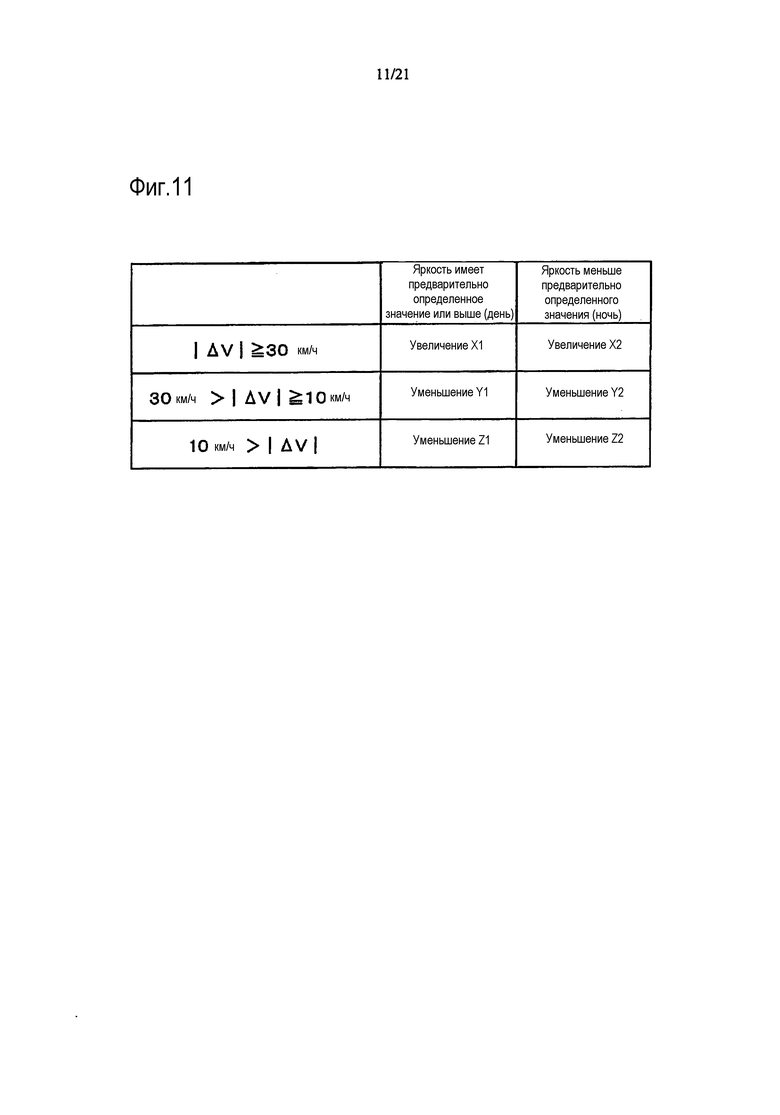
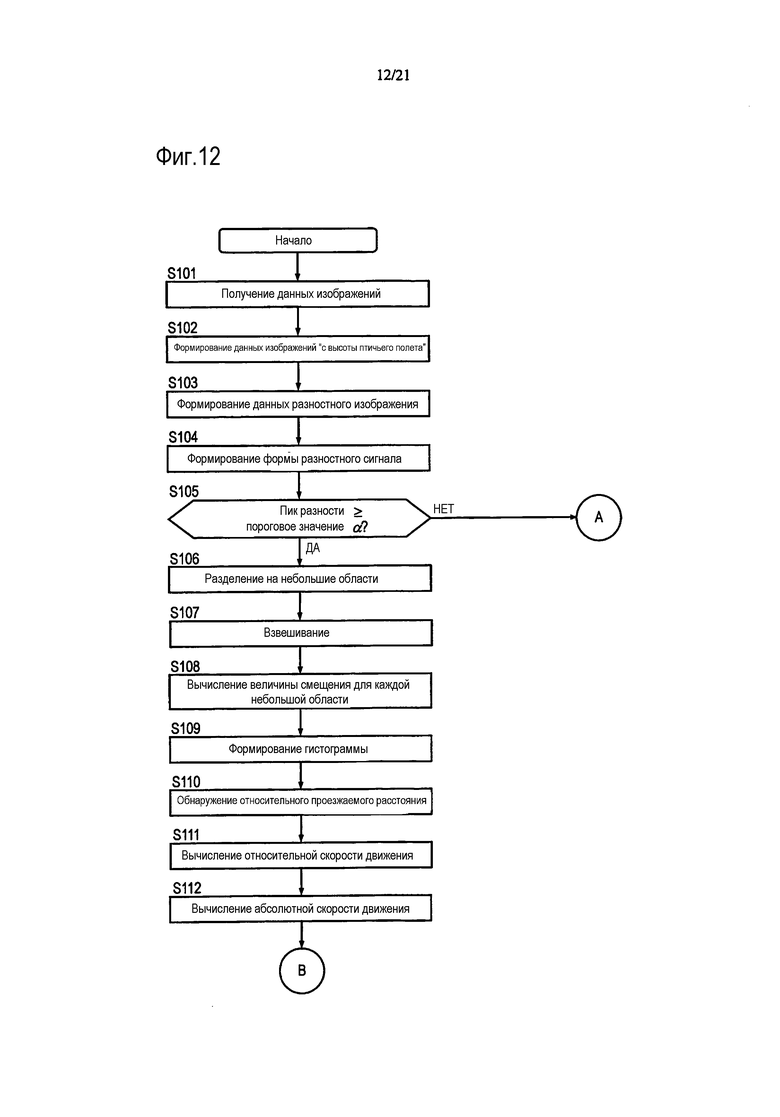
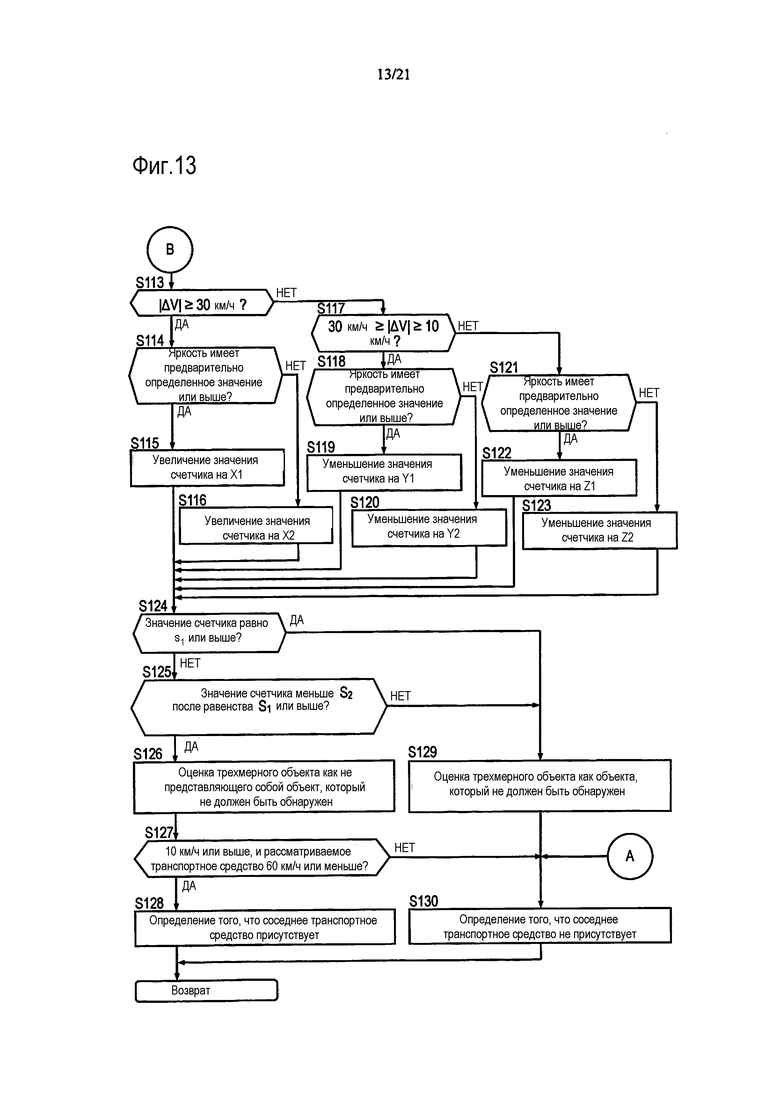
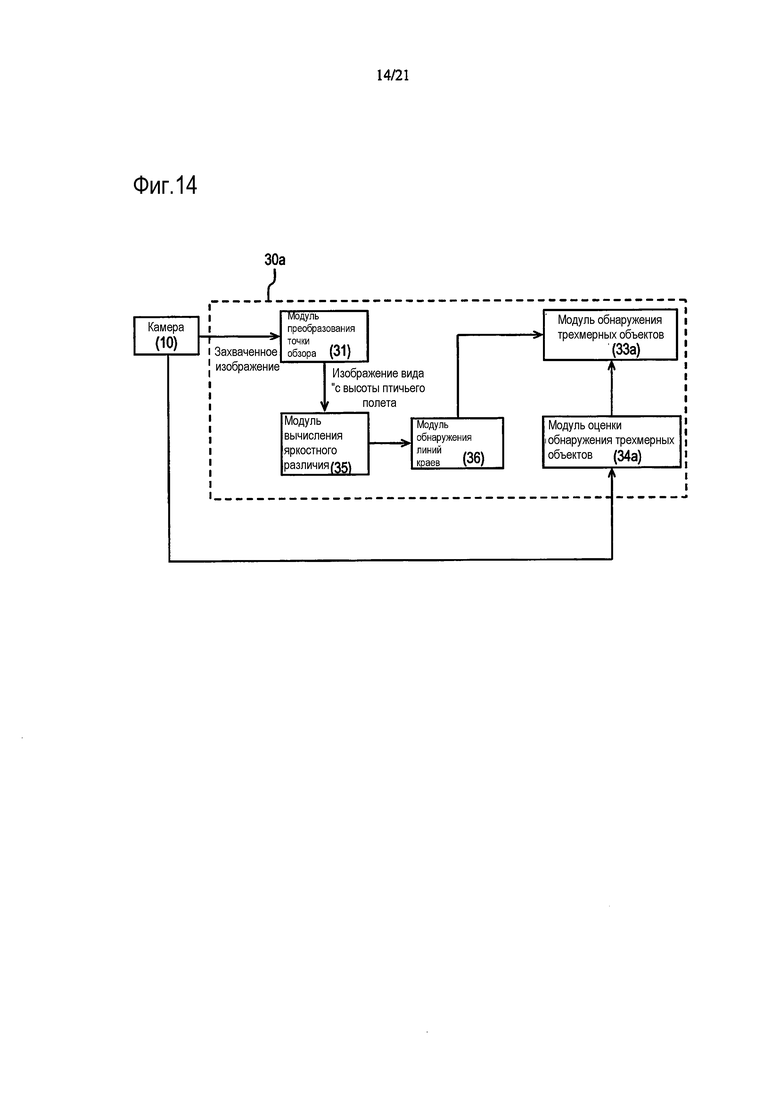
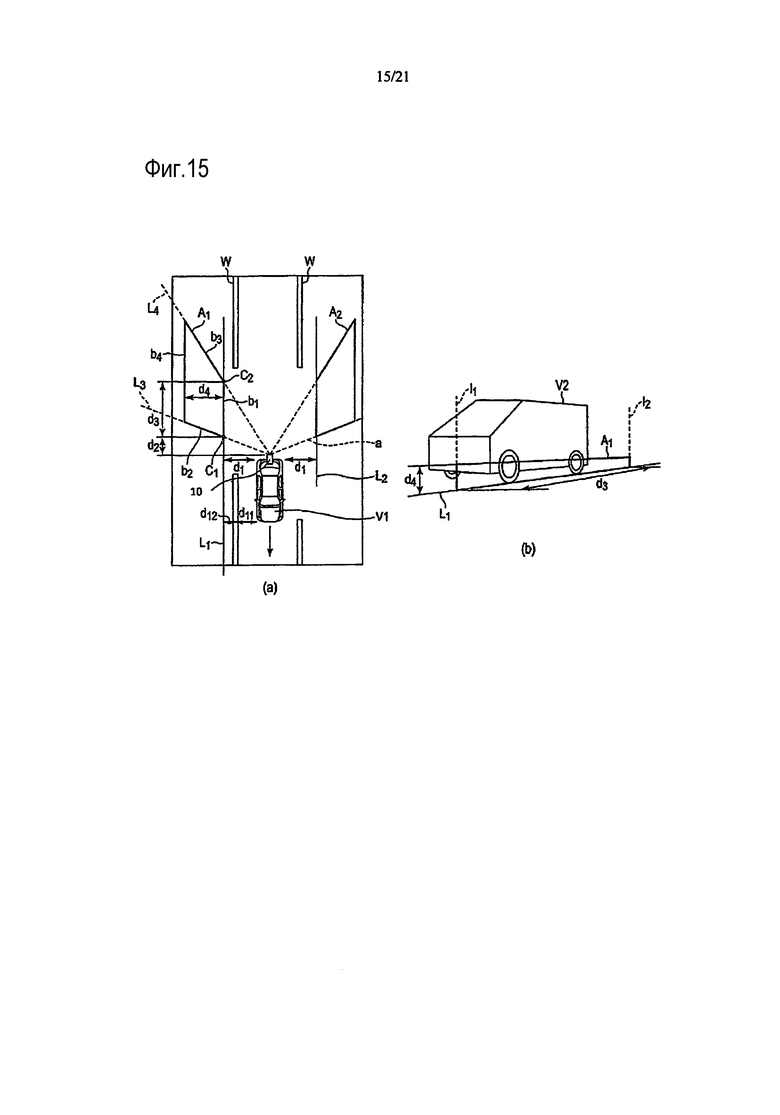
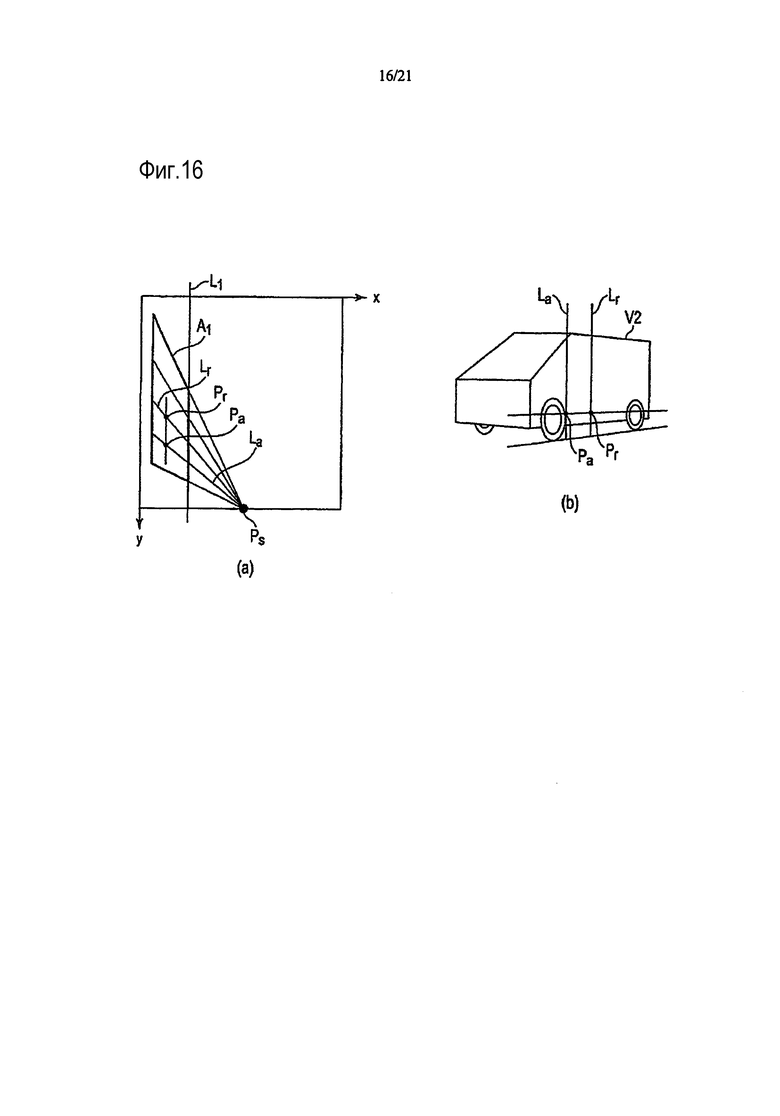
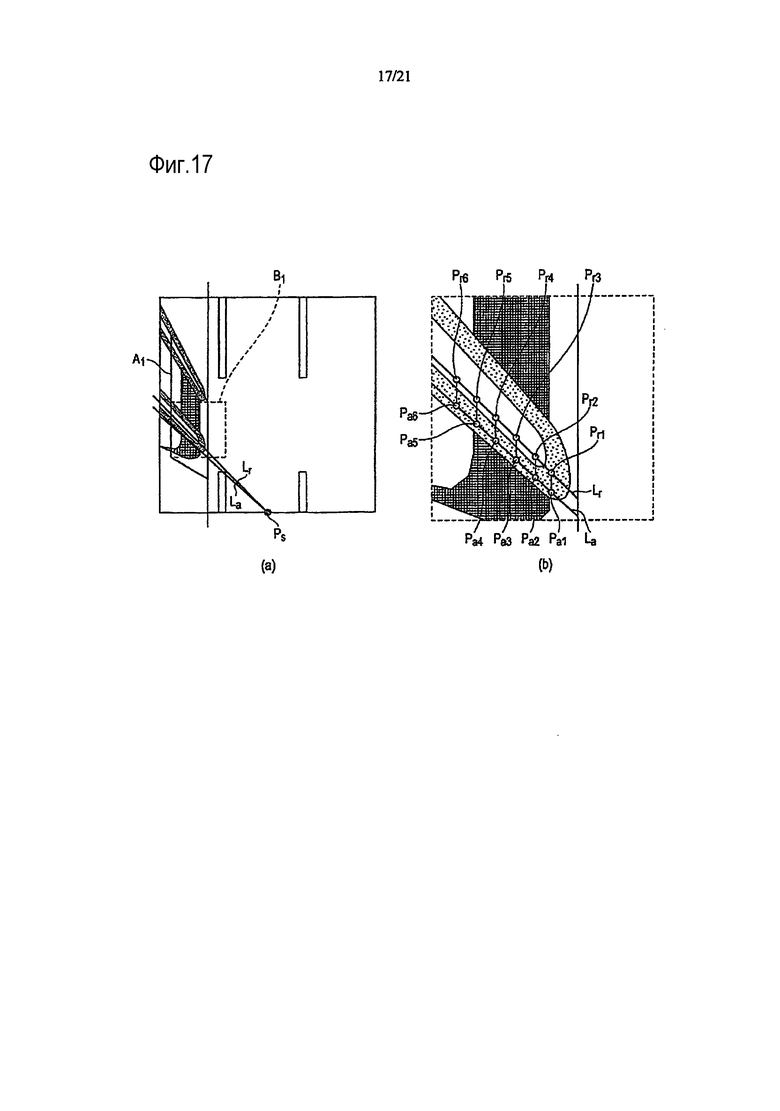
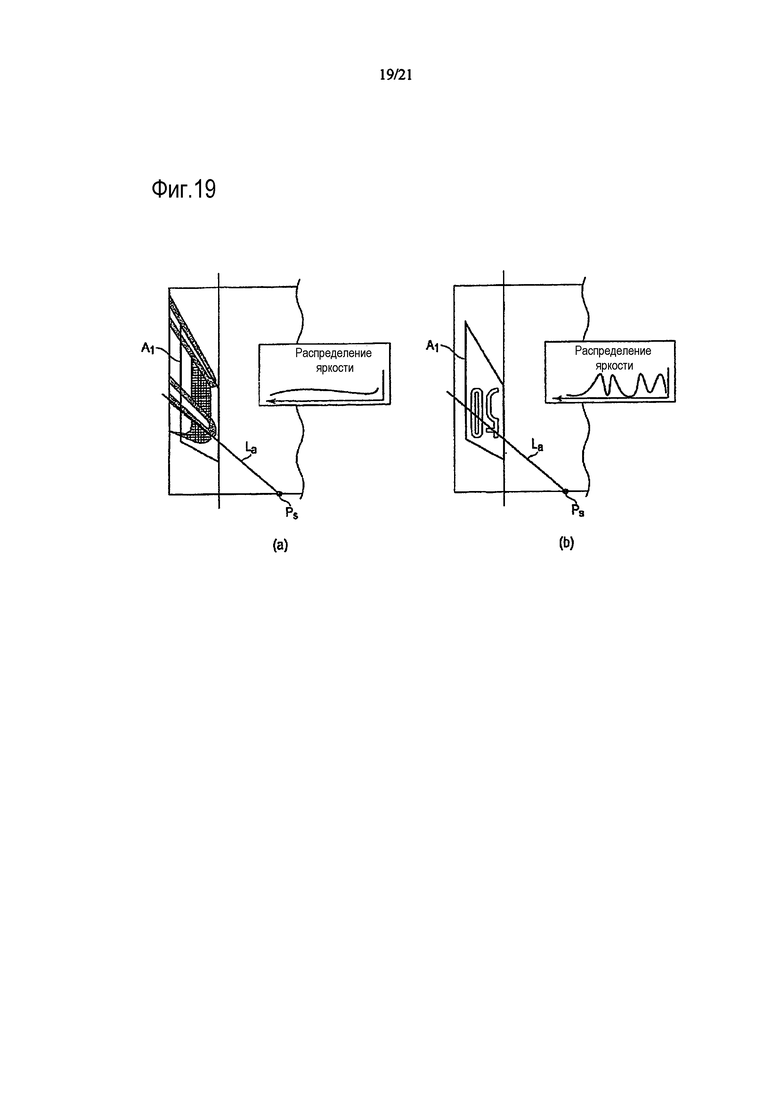
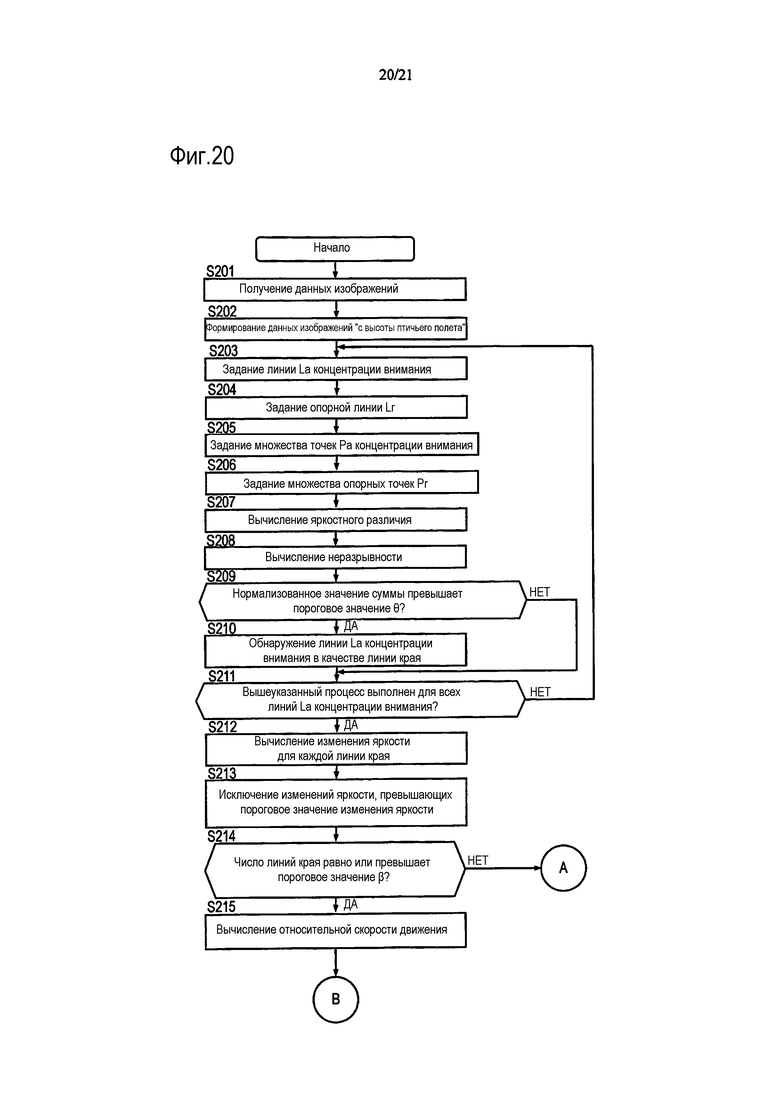
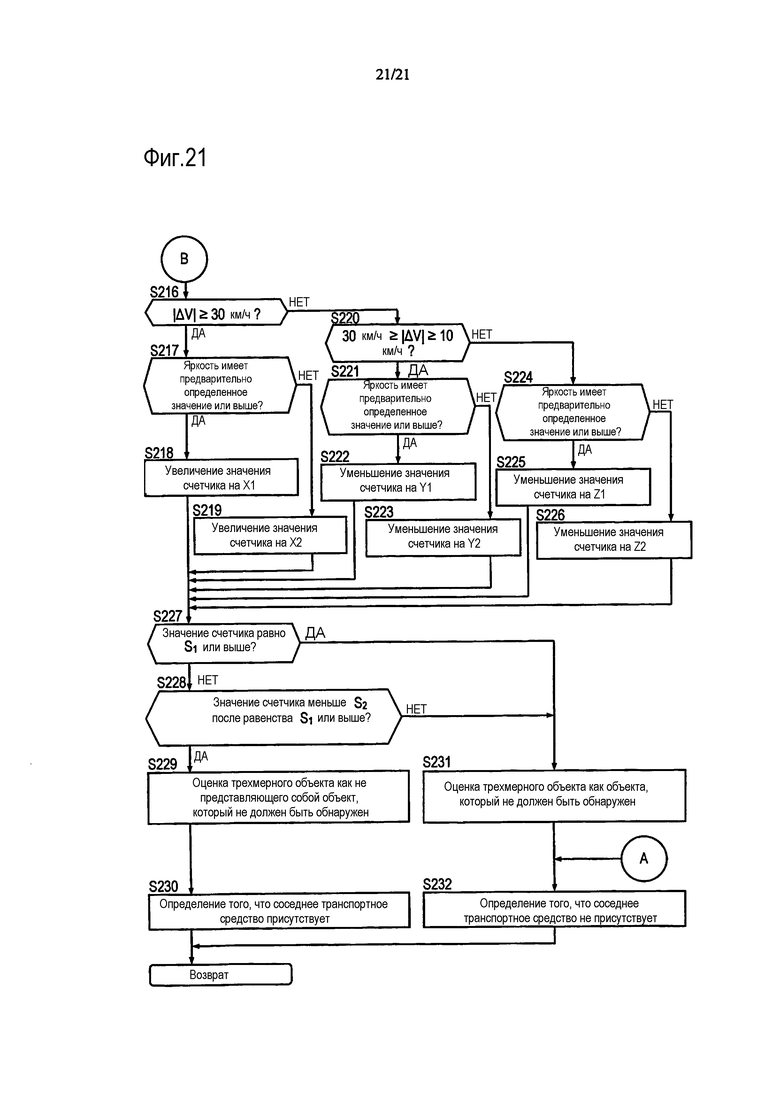
Изобретение относится к области обнаружения трехмерных объектов. Технический результат заключается в оценке обнаруженных трехмерных объектов. Указанный результат обеспечивается устройством, которое содержит: средство преобразования изображений для преобразования точки обзора изображения, полученного посредством средства захвата изображений, чтобы создавать изображение вида "с высоты птичьего полета"; средство обнаружения трехмерных объектов для формирования информации форм разностных сигналов из разностного изображения, в котором позиции изображений вида "с высоты птичьего полета", снятых в различные моменты времени, и для обнаружения трехмерного объекта на основе информации форм разностных сигналов; средство вычисления скорости движения для вычисления скорости движения трехмерного объекта; средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект другим транспортным средством; средство оценки объектов для многократного вычисления величины изменения во времени скорости движения трехмерного объекта; и средство управления для недопущения, на основе результатов оценки средства оценки объектов, не требующих обнаружения, оценки посредством средства оценки трехмерных объектов того, что трехмерный объект является другим транспортным средством. 3 н. и 6 з.п. ф-лы, 21 ил.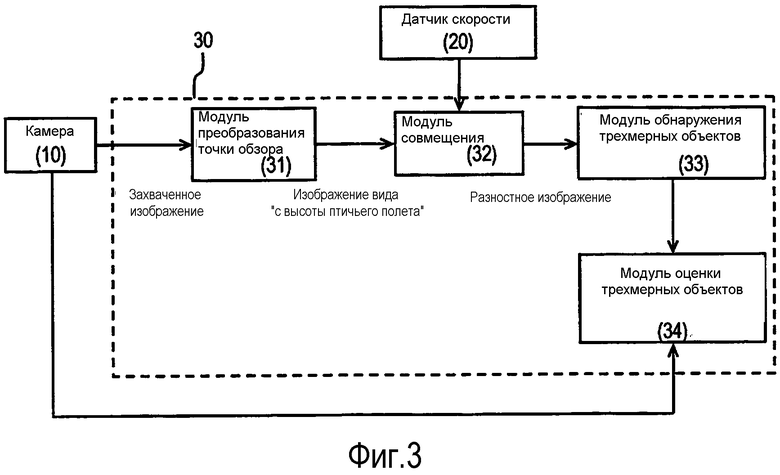
1. Устройство обнаружения трехмерных объектов, содержащее:
- средство захвата изображений для захвата предварительно определенной области обнаружения позади рассматриваемого транспортного средства;
- средство преобразования изображений для преобразования точки обзора изображения, полученного посредством средства захвата изображений, чтобы создавать изображение вида "с высоты птичьего полета";
- средство обнаружения трехмерных объектов для совмещения, в виде "с высоты птичьего полета", позиций изображений вида "с высоты птичьего полета", полученных в различные моменты времени посредством средства преобразования изображений, для формирования информации форм разностных сигналов посредством подсчета числа пикселов, которые указывают предварительно определенную разность в разностном изображении совмещенных изображений вида "с высоты птичьего полета", чтобы формировать частотное распределение, и для обнаружения трехмерного объекта на основе информации форм разностных сигналов; и
- средство вычисления скорости движения для вычисления скорости движения трехмерного объекта на основе информации форм разностных сигналов;
- средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект, обнаруженный посредством средства обнаружения трехмерных объектов, другим транспортным средством, присутствующим в предварительно определенной области, на основе информации форм разностных сигналов;
- средство оценки объектов, не требующих обнаружения, для многократного вычисления величины изменения во времени скорости движения трехмерного объекта, чтобы за счет этого обнаруживать величину изменчивости в скорости движения трехмерного объекта, и для определения того, что трехмерный объект имеет большую вероятность представлять собой объект, не требующий обнаружения, отличающийся от другого транспортного средства, соразмерно более высокой величине изменчивости; и
- средство управления для недопущения, на основе результатов оценки средства оценки объектов, не требующих обнаружения, оценки посредством средства оценки трехмерных объектов того, что трехмерный объект является другим транспортным средством.
2. Устройство обнаружения трехмерных объектов по п. 1, отличающееся тем, что:
- средство оценки объектов, не требующих обнаружения, увеличивает предварительно определенное значение счетчика, когда величина изменчивости составляет предварительно определенное первое значение оценки или больше, и снижает значение счетчика, когда величина изменчивости составляет второе значение оценки или меньше, которое меньше первого значения оценки, чтобы за счет этого увеличивать или снижать значение счетчика на основе величины изменчивости и оценивать то, является или нет трехмерный объект объектом, не требующим обнаружения, на основе увеличенного/уменьшенного значения счетчика.
3. Устройство обнаружения трехмерных объектов по п. 2, отличающееся тем, что:
- средство оценки объектов, не требующих обнаружения, оценивает то, что трехмерный объект является объектом, не требующим обнаружения, когда значение счетчика становится предварительно определенным первым пороговым значением или больше в результате увеличения или уменьшения значения счетчика на основе величины изменчивости.
4. Устройство обнаружения трехмерных объектов по п. 3, отличающееся тем, что:
- средство оценки объектов, не требующих обнаружения, оценивает то, что трехмерный объект не является объектом, не требующим обнаружения, когда значение счетчика становится меньше предварительно определенного второго порогового значения, которое меньше первого порогового значения, после того, как значение счетчика становится первым пороговым значением или больше.
5. Устройство обнаружения трехмерных объектов по п. 2, отличающееся тем, что оно дополнительно содержит:
- средство обнаружения яркости для обнаружения яркости предварительно определенной области,
- причем средство оценки объектов, не требующих обнаружения, снижает величину увеличения/уменьшения значения счетчика на основе величины изменчивости, когда яркость предварительно определенной области меньше предварительно определенного значения по сравнению с тем, когда яркость предварительно определенной области имеет предварительно определенное значение или больше.
6. Устройство обнаружения трехмерных объектов по п. 1, отличающееся тем, что:
- средство обнаружения трехмерных объектов подсчитывает число пикселов, которые показывают предварительно определенную разность в разностном изображении, вдоль направления, в котором сжимается трехмерный объект, когда выполняется преобразование в точке обзора в изображение вида "с высоты птичьего полета", чтобы формировать частотное распределение и за счет этого формировать одномерную информацию форм разностных сигналов.
7. Устройство обнаружения трехмерных объектов, содержащее:
- средство захвата изображений для захвата предварительно определенной области обнаружения позади рассматриваемого транспортного средства;
- средство преобразования изображений для преобразования точки обзора изображения, полученного посредством средства захвата изображений, чтобы создавать изображение вида "с высоты птичьего полета";
- средство обнаружения трехмерных объектов для обнаружения информации краев из изображения вида "с высоты птичьего полета", полученного из средства преобразования изображений, и для обнаружения трехмерного объекта на основе информации краев;
- средство вычисления скорости движения для вычисления скорости движения трехмерного объекта на основе информации краев;
- средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект, обнаруженный посредством средства обнаружения трехмерных объектов, другим транспортным средством, присутствующим в предварительно определенной области, на основе информации краев;
- средство оценки объектов, не требующих обнаружения, для многократного вычисления величины изменения во времени скорости движения трехмерного объекта, чтобы за счет этого обнаруживать величину изменчивости в скорости движения трехмерного объекта, и для определения того, что трехмерный объект имеет большую вероятность представлять собой объект, не требующий обнаружения, отличающийся от другого транспортного средства, соразмерно более высокой величине изменчивости; и
- средство управления для недопущения, на основе результатов оценки средства оценки объектов, не требующих обнаружения, оценки посредством средства оценки трехмерных объектов того, что трехмерный объект является другим транспортным средством.
8. Устройство обнаружения трехмерных объектов по п. 7, отличающееся тем, что:
- средство обнаружения трехмерных объектов обнаруживает информацию краев вдоль направления, в котором сжимается трехмерный объект, когда выполняется преобразование в точке обзора в изображение вида "с высоты птичьего полета".
9. Устройство обнаружения трехмерных объектов, содержащее:
- средство захвата изображений для захвата предварительно определенной области обнаружения позади рассматриваемого транспортного средства;
- средство преобразования изображений для преобразования точки обзора изображения, полученного посредством средства захвата изображений, чтобы создавать изображение вида "с высоты птичьего полета";
- средство обнаружения трехмерных объектов для обнаружения трехмерного объекта на основе информации распределения пикселов посредством обнаружения информации распределения пикселов, имеющих яркостное различие, равное предварительно определенному пороговому значению или больше, в направлении, в котором сжимается трехмерный объект, когда выполняется преобразование в точке обзора в изображение вида "с высоты птичьего полета" для изображения вида "с высоты птичьего полета", полученного из средства преобразования изображений;
- средство вычисления скорости движения для вычисления скорости движения трехмерного объекта на основе величины изменения во времени информации распределения пикселов;
- средство оценки трехмерных объектов для оценки того, является или нет трехмерный объект, обнаруженный посредством средства обнаружения трехмерных объектов, другим транспортным средством, присутствующим в предварительно определенной области, на основе информации распределения пикселов;
- средство оценки объектов, не требующих обнаружения, для многократного вычисления величины изменения во времени скорости движения трехмерного объекта, чтобы за счет этого обнаруживать величину изменчивости в скорости движения трехмерного объекта, и для определения того, что трехмерный объект имеет высокую вероятность того, что он представляет собой другое транспортное средство, когда величина изменчивости меньше предварительно определенного значения; и
- средство управления для способствования оценке, выполняемой посредством средства оценки трехмерных объектов, того, что трехмерный объект является другим транспортным средством, когда вероятность того, что трехмерный объект является другим транспортным средством, оценивается как высокая посредством средства оценки объектов, не требующих обнаружения.
| WO 2010099416 A1, 02.09.2010 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| WO 2009036176 A1, 19.03.2009 | |||
| US 2010245579 A1, 30.09.2010 | |||
| US 2012062743 A1, 15.03.2012. | |||

