Область техники, к которой относится изобретение
Изобретение относится к формированию диаграммы направленности аудиосигналов и, в частности, но не исключительно, к формированию диаграммы направленности аудиосигналов с использованием решеток микрофонов, существенно меньших, чем длина волны аудиосигналов, для которых осуществляется формирование диаграммы направленности.
Характеристика предшествующего уровня техники
Усовершенствованная обработка аудиосигналов становится все более важной во многих областях, включая, например, телекоммуникации, рассылку контента и т.д. Например, в некоторых приложениях, таких, как системы громкой связи (hands-free communication), и речевого управления, применялась сложная обработка входных сигналов из множества микрофонов, чтобы обеспечить конфигурируемую направленную чувствительность для решетки микрофонов, содержащей микрофоны. В частности, обработка сигналов из решетки микрофонов обеспечивает генерирование диаграммы направленности аудиосигнала с направлением, которое можно изменять просто путем изменения характеристик комбинации сигналов отдельных микрофонов.
Как правило, целью алгоритмов формирования лучей является ослабление влияние источников помех при обеспечении большого усиления для источника желательного звука. Например, алгоритмом формирования лучей (диаграммы направленности) можно управлять, обеспечивая сильное ослабление (предпочтительно - нуль характеристики) в направлении сигнала, принимаемого из основного источника помех.
По причинам практического осуществления, желательно, чтобы решетка микрофонов была относительно малой. Вместе с тем, когда длина волны звука, представляющего интерес, гораздо больше, чем размер решетки, многие алгоритмы формирования диаграммы направленности, такие, как алгоритмы формирования диаграммы направленности посредством аддитивной задержки и суммирования, не способны обеспечить достаточную направленность, поскольку ширина луча для таких длин волн существенно искажается.
Подход к достижению улучшенной направленности состоит в применении так называемых методов формирования сверхнаправленных лучей. Такие методы формирования сверхнаправленных лучей основаны на фильтрах с асимметричными коэффициентами фильтров, и этот подход, по существу, соответствует вычитанию сигналов или определению пространственных производных поля звукового давления. Однако хотя это может улучшить направленность, известно также, что это достигается ценой стойкости к внешним воздействиям, например, повышенной чувствительности к белому шуму (датчика) и повышенной чувствительности к рассогласованиям в характеристиках микрофонов.
В статье “Optimal Azimuthal Steering of a First-order Superdirectional Microphone Response”, R.M.M. Derkx, International Workshop on Acoustic Echo and Noise Control, September 2008, Seattle, анализируется система, которая генерирует собственные лучи для двумерной решетки микрофонов. Затем эти собственные лучи комбинируются чтобы максимизировать ослабление влияния одноточечного источника помех. В частности, на направление одноточечного источника помех приходится нуль характеристики при поддержании подходящего усиления для желательного направления.
Кроме того, хотя этот подход обеспечивает улучшенные рабочие параметры во многих сценариях, он обеспечивает неоптимальные рабочие параметры в некоторых сценариях. Он также демонстрирует тенденцию к требованию относительно сложной и ресурсоемкой обработки.
Поэтому был бы выгодным усовершенствованный подход к формированию диаграмм направленности аудиосигналов, а в частности - подход, обеспечивающий улучшенную адаптацию к текущим условиям и аудиосреде, повышенную гибкость, упрощенное воплощение, улучшенные рабочие параметры для разных сценариев работы и/или улучшенные рабочие параметры в целом.
Краткое изложение сущности изобретения
Соответственно, изобретение направлено на предпочтительное смягчение, ослабление влияния или исключение одного или нескольких из вышеупомянутых недостатков по отдельности или в любой комбинации.
В соответствии с одним аспектом изобретения, предложено устройство для формирования диаграммы направленности аудиосигналов, содержащее: принимающую схему для приема сигналов из по меньшей мере двумерной решетки микрофонов, содержащей по меньшей мере три микрофона; опорную схему для генерирования по меньшей мере трех опорных лучей из сигналов микрофонов; комбинирующую схему для генерирования выходного сигнала, соответствующего желательной диаграмме направленности, путем комбинирования опорных лучей в ответ на первое направление полезного источника звука и оценку направления для мешающего источника звука; оценивающую схему для генерирования оценки направления посредством определения первого угла, соответствующего локальному минимуму для меры мощности выходного сигнала в первом интервале углов, определения второго угла, соответствующего локальному минимуму для меры мощности выходного сигнала во втором интервале углов, и определения оценки направления как угла, выбранного из набора углов, соответствующих локальным минимумам для меры мощности выходного сигнала, причем этот набор содержит по меньшей мере упомянутые первый угол и второй угол; и при этом комбинирующая схема выполнена с возможностью определения параметров комбинирования, предназначенных для комбинирования опорных лучей, чтобы обеспечить провал для угла, соответствующего оценке направления, и минимизацию меры стоимости направленности, причем мера стоимости направленности характеризует соотношение между усилением в первом направлении и средним усилением.
Изобретение может обеспечить улучшенные рабочие показатели. В частности, может быть достигнута улучшенная и/или облегченная адаптация к текущей аудиосреде. Изобретение может обеспечить подход к формированию диаграммы направленности, который дает высокие рабочие показатели, как для направленного подавления точечных помех, так и для ослабления диффузионного шума. В частности, этот подход пригоден - и может обеспечить конкретные преимущества - для систем, в которых длина волны аудиосигналов может быть существенно большей, чем размер решетки микрофонов.
Изобретение может обеспечить воплощение и/или работу низкой сложности. Применяемый подход может оказаться пригодным для обеспечения улучшенной направленности, а в частности, может оказаться подходящим для сценариев, в которых размер решетки микрофонов гораздо меньше, чем интересующая длина волны.
Во многих вариантах осуществления и сценариях, предлагаемый подход может обеспечить нуль характеристики на направлении к одноточечной помехе, существенно уменьшая при этом диффузионный шум. В частности, этот подход во многих сценариях обеспечивает уменьшение одноточечной помехи, соответствующее многим известным технологиям уменьшения помех или лучшее, чем они, с одновременным обеспечением улучшенной характеристики диффузионного шума.
Предлагаемый подход может во многих сценариях обеспечить имеющее низкую сложность, высокоэффективное и выгодное управление лучом на основании имеющего низкую сложность выделения параллельных локальных минимумов. Во многих вариантах осуществления, предлагаемый подход может гарантировать, что по меньшей мере один из идентифицированных локальных минимумов также является глобальным минимумом, и поэтому может обеспечить эффективную оценку угла помехи.
Опорные лучи могут быть неадаптивными и могут быть независимыми от захватываемых сигналов и/или условий аудиосреды. Опорные лучи могут быть постоянными и могут генерироваться посредством постоянной/неадаптивной комбинации сигналов по меньшей мере из трех микрофонов. Опорные лучи могут, в частности, быть собственными лучами или ортогональными лучами.
Первый интервал углов и второй интервал углов могут быть несмежными интервалами и могут быть смежными интервалами. Первый и второй интервалы углов могут вместе охватывать весь интервал 360°.
Мешающий источник звука может быть предполагаемым мешающим источником звука. Оценку направления для источника звука можно генерировать независимо от того, присутствует ли источник звука, или нет. Таки образом, даже если мешающий источник звука на обнаружен, оценивающая схема может генерировать оценку направления из сигналов микрофонов в предположении, что мешающий источник звука присутствует.
В соответствии с опциональным признаком изобретения, оценивающая схема выполнена с возможностью выбора оценки направления как оного из первого угла и второго угла в ответ на градиент меры мощности выходного сигнала как функции оценки направления для угла, разделяющего первый интервал углов и второй интервал углов.
Это может обеспечить особенно эффективное и простое определение оценки направления. Угол может быть углом между первым интервалом углов и вторым интервалом углов, включая концевые точки одного интервала углов или их обоих.
В соответствии с опциональным признаком изобретения, первый интервал углов содержит углы от 0 до π, а второй интервал углов содержит углы от π до 2π.
Это может обеспечить особенно выгодные рабочие показатели, в частности, может сделать возможной адаптацию ко всем возможных направлениям мешающего источника звука.
В соответствии с опциональным признаком изобретения, оценивающая схема выполнена с возможностью выбора оценки направления как одного из первого угла и второго угла в ответ на градиент меры мощности выходного сигнала как функции оценки направления для угла π.
Это может обеспечить особенно эффективное и простое определение оценки направления.
В соответствии с опциональным признаком изобретения, комбинирующая схема содержит подавитель боковых лепестков.
В соответствии с опциональным признаком изобретения, подавитель боковых лепестков выполнен с возможностью генерирования выходного сигнала как взвешенной комбинации по меньшей мере основного сигнала, первого шумового опорного сигнала и второго шумового опорного сигнала.
Это может обеспечить особенно выгодные рабочие показатели и/или практическое воплощение. Основной сигнал может соответствовать лучу, адаптированному в направлении полезного источника звука, а каждый из шумовых опорных сигналов может соответствовать лучам, адаптированным к подавлению или уменьшению шума. В частности, шумовые опорные сигналы могут иметь провалы характеристики в направлении полезного источника звука.
В соответствии с опциональным признаком изобретения, комбинирующая схема выполнена с возможностью вычисления весов для первого и второго шумовых опорных сигналов в ответ на оценку направления и минимизацию меры стоимости направленности.
В соответствии с опциональным признаком изобретения, оценивающая схема выполнена с возможностью определения по меньшей мере одного из первого и второго углов путем поиска градиента, применяемого для подавителя боковых лепестков, соответствующего подавителю боковых лепестков комбинирующей схемы и имеющего входную переменную угла.
Это может обеспечить особенно выгодные рабочие показатели и/или простую реализацию. В частности, градиентный поиск может обеспечить весьма эффективный подход для идентификации потенциальных минимумов, что может оптимизировать операцию формирования лучей. Возможно достижение эффективной и имеющей низкую сложность адаптации формирования луча, которая может как уменьшить диффузионный шум, так и уменьшить/подавить одноточечную помеху.
Во многих вариантах осуществления первый и второй углы определяются путем градиентного поиска. Градиентный поиск можно проводить с использованием операции подавителя боковых лепестков, которая идентична операции подавителя боковых лепестков, используемой для генерирования выходного сигнала, но со значением входной переменной угла, которая может отличаться от значения фазы (оценки направления), используемого для генерирования выходного сигнала (и которая поэтому может изменяться независимо).
В некоторых вариантах осуществления, градиентный поиск можно применять параллельно в обоих интервалах углов с использованием операций параллельных подавителей боковых лепестков с независимыми входными переменными углов. Выходной сигнал комбинирующей схемы можно выбрать как сигнал параллельного подавителя боковых лепестков, соответствующий выбранному углу из первого и второго углов.
В некоторых вариантах осуществления, подавитель боковых лепестков, соответствующий подавителю боковых лепестков комбинирующей схемы, можно использовать для определения градиента меры мощности выходного сигнала для заданного угла (в частности, π), а выбор между первым и вторым углами можно проводить в ответ на этот градиент.
В соответствии с опциональным признаком изобретения, обновленное значение для входной переменной угла определяется как функция выходного сигнала подавителя боковых лепестков для текущего значения фазы входной переменной угла, а также первого и второго шумовых опорных сигналов подавителя боковых лепестков для текущего значения фазы.
Это может обеспечить особенно выгодные рабочие показатели и/или упрощенное воплощение и/или упрощенную операцию.
В соответствии с опциональным признаком изобретения, первый и второй шумовые опорные сигналы взвешиваются как функция текущего значения фазы.
Это может обеспечить особенно выгодные рабочие параметры и/или упрощенное воплощение или упрощенную операцию.
В соответствии с опциональным признаком изобретения, оценивающая схема выполнена с возможностью определения оценки мощности по меньшей мере для одного из первого и второго шумовых опорных сигналов и осуществления нормализации обновленного значения как функции этой оценки мощности.
Это может обеспечить особенно выгодные рабочие параметры и/или упрощенное воплощение и/или упрощенную операцию.
В соответствии с опциональным признаком изобретения, упомянутая по меньшей мере двумерная решетка микрофонов содержит по меньшей мере четыре микрофона, а устройство содержит схему для комбинирования сигналов по меньшей мере двух из упомянутых по меньшей мере четырех микрофонов перед генерированием опорных главных лепестков.
Это может обеспечить особенно выгодные рабочие параметры и/или упрощенное воплощение и/или упрощенную операцию. В частности, это может обеспечить улучшенные рабочие показатели шума во многих сценариях.
В соответствии с опциональным признаком изобретения, устройство дополнительно содержит упомянутую по меньшей мере двумерную решетку микрофонов, причем эта по меньшей мере двумерная решетка микрофонов содержит направленные микрофоны, имеющие максимальный отклик в направлении наружу от периметра упомянутой по меньшей мере двумерной решетки микрофонов.
Это может обеспечить особенно выгодные рабочие параметры и/или упрощенное воплощение и/или упрощенную операцию.
В соответствии с одним аспектом изобретения, предложен способ формирования диаграмм направленности аудиосигналов, заключающийся в том, что осуществляют прием сигналов из по меньшей мере двумерной решетки микрофонов, содержащей по меньшей мере три микрофона; генерируют по меньшей мере три опорных луча из сигналов микрофонов; генерируют выходной сигнал, соответствующий желательной диаграмме направленности, путем комбинирования опорных лучей в ответ на первое направление полезного источника звука и оценку направления для мешающего источника звука; генерируют оценку направления посредством определения первого угла, соответствующего локальному минимуму для меры мощности выходного сигнала в первом интервале углов, определения второго угла, соответствующего локальному минимуму для меры мощности выходного сигнала во втором интервале углов, и определения оценки направления как угла, выбранного из набора углов, соответствующего локальным минимумам для меры мощности выходного сигнала, причем этот набор содержит по меньшей мере упомянутые первый угол и второй угол; и при этом комбинирование опорных лучей включает в себя определение параметров комбинирования, предназначенных для комбинирования опорных лучей, чтобы обеспечить провал в характеристике угла, соответствующей оценке направления, и минимизацию меры стоимости направленности, причем мера стоимости направленности указывает соотношение между усилением в первом направлении и усредненным по энергии усилением.
Эти и другие аспекты, признаки и преимущества изобретения станут очевидными и ясными из описываемого(ых) ниже варианта(ов) осуществления.
Краткое описание чертежей
Варианты осуществления будут описаны ниже лишь в качестве примера со ссылками на чертежи, при этом:
фиг. 1 иллюстрирует пример системы для захвата аудиосигналов с адаптируемой характеристикой направленности в соответствии с некоторыми вариантами осуществления изобретения;
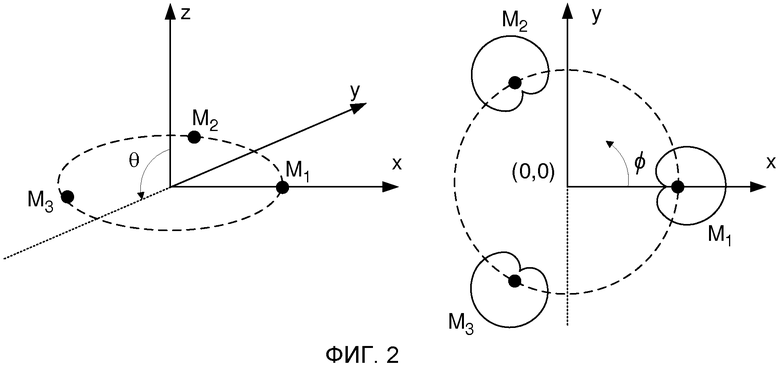
фиг. 2 иллюстрирует пример конфигурации микрофонов для решетки микрофонов;
фиг. 3 иллюстрирует пример собственных лучей, генерируемых системой согласно фиг. 1;
фиг. 4 иллюстрирует пример подавителя боковых лепестков, используемого в системе согласно фиг. 1;
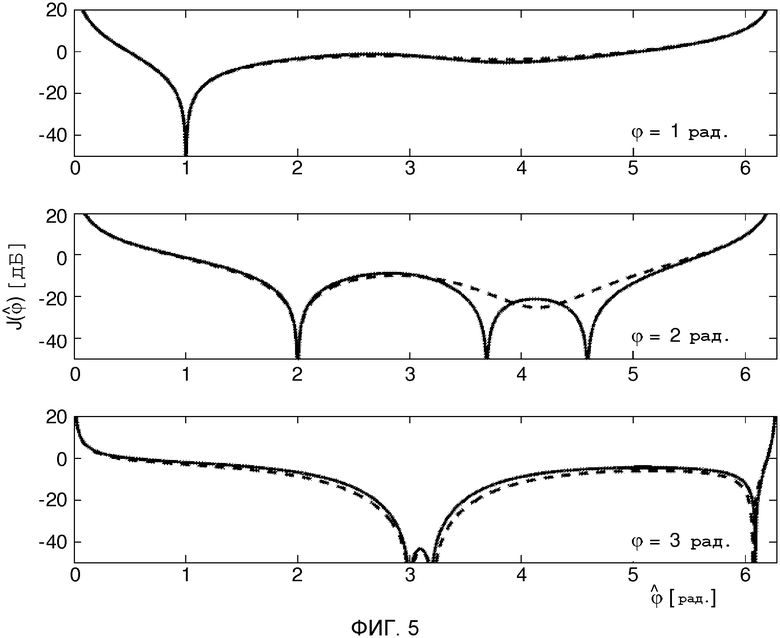
фиг. 5 иллюстрирует пример функции стоимости для адаптации системы согласно фиг. 1;
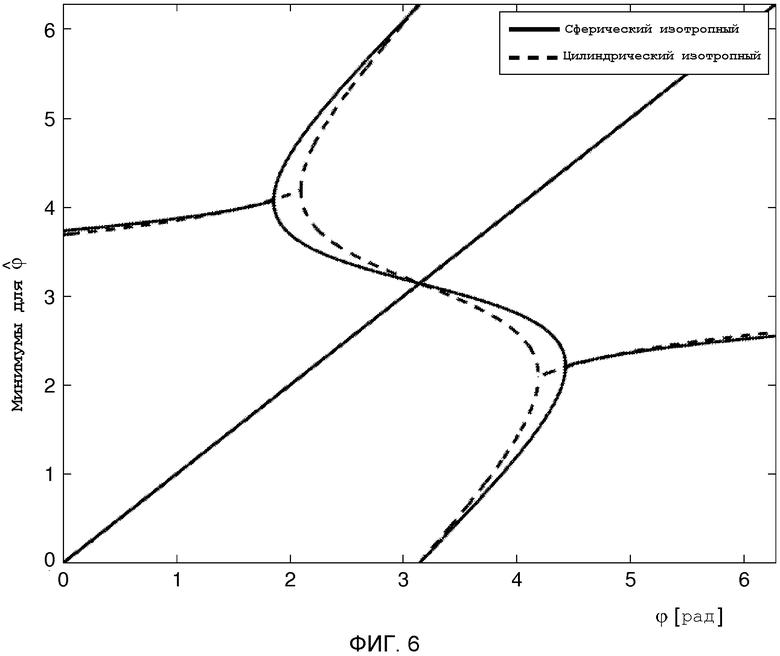
фиг. 6 иллюстрирует пример локальных минимумов функции стоимости согласно фиг. 5;
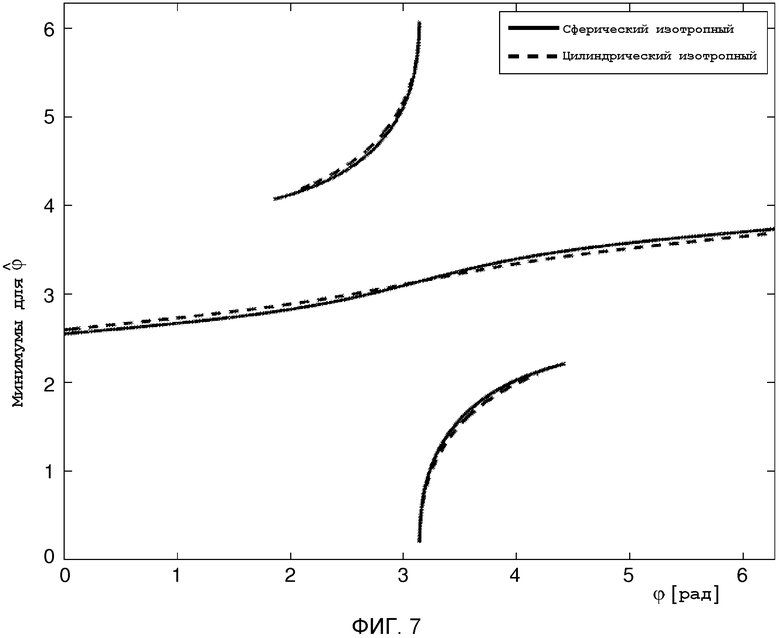
фиг. 7 иллюстрирует пример локальных максимумов функции стоимости согласно фиг. 5;
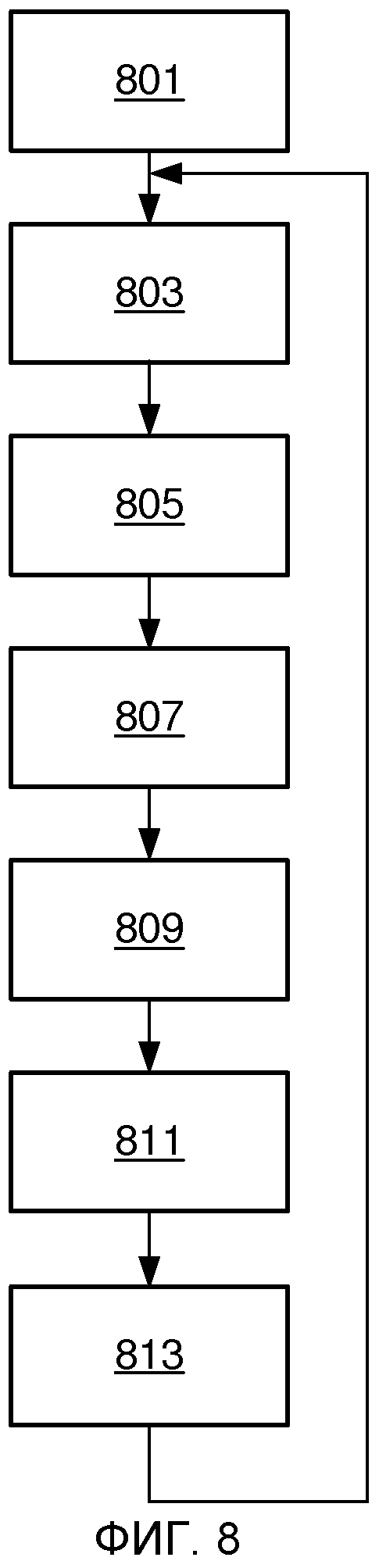
фиг. 8 иллюстрирует пример способа захвата аудиосигналов с адаптируемой характеристикой направленности в соответствии с некоторыми вариантами осуществления изобретения.
Подробное описание некоторых вариантов осуществления изобретения
Фиг. 1 иллюстрирует пример системы для захвата аудиосигналов с адаптируемой характеристикой направленности. Эта система обрабатывает сигналы из множества микрофонов, чтобы генерировать подходящую желательную форму луча. Обработка, в частности, адаптирована так, что генерируемый выходной сигнал имеет существенно улучшенные характеристики шума и помехи. Система также пригодна для использования в сценариях, в которых длина волны сигналов существенно больше, чем размеры решетки микрофонов, т.е., чем расстояния между микрофонами.
Система обрабатывает принимаемые сигналы микрофонов, чтобы генерировать набор постоянных не адаптируемых опорных лучей. Эти опорные лучи затем адаптивно комбинируются, чтобы генерировать желательную диаграмму направленности. Комбинацию адаптируют так, что получаемая форма луча адаптирована для подавления или существенного ослабления предполагаемого одноточечного источника помех с одновременной минимизацией или одновременным уменьшением влияния диффузионного шума.
Система обеспечивает эффективное адаптивное формирование диаграммы направленности, при котором главный лепесток может направляться на полезный источник звука с одновременной адаптацией диаграммы направленности таким образом, что точечный источник помех с другого угла эффективно подавляется, и при этом достигается, по существу, оптимальное подавление диффузионного (изотропного) шума. Система согласно фиг. 1 включает в себя, в частности, адаптивную схему управления положением нуля характеристики с множеством оценок градиента для регулирования диаграммы направленности таким образом, что это эффективное подавление шума и помех может быть достигнуто автоматически.
Система согласно фиг. 1 содержит решетку 101 микрофонов, которая является двумерной решеткой микрофонов. Решетка 101 микрофонов содержит по меньшей мере три микрофона, которые не расположены на одномерной линии. В большинстве вариантов осуществления, кратчайшее расстояние от одного микрофона до линии, проходящей через два других микрофона, составляет по меньшей мере пятую часть расстояния между этими двумя микрофонами.
В конкретном примере, решетка 101 микрофонов содержит три микрофона, которые равномерно разнесены по окружности, как показано на фиг. 2.
Таким образом, в этом примере используется круговая решетка по меньшей мере из трех (всенаправленных или однонаправленных) датчиков в планарной геометрии. Должно быть ясно, что в других вариантах осуществления можно использовать другие компоновки микрофонов. Также должно быть ясно, что для вариантов осуществления, в которых используется более трех микрофонов, возможна их компоновка в не планарной геометрии, т.е., решетка микрофонов может быть трехмерной решеткой микрофонов. Однако в нижеследующем описании основное внимание будет уделено круговой решетке с тремя равноотстоящими микрофонами, расположенной в азимутальной плоскости.
Решетка 101 микрофонов подключена к принимающей схеме 103, которая принимает сигналы микрофонов. В примере согласно фиг. 1, принимающая схема 103 выполнена с возможностью усиления, фильтрации и оцифровывания сигналов микрофонов, как это хорошо известно специалисту в данной области техники.
Принимающая схема 103 подключена к опорному процессору 105, который выполнен с возможностью генерирования по меньшей мере трех опорных лучей из сигналов микрофонов. Опорные лучи являются постоянными лучами, которые не адаптируются, а генерируются посредством фиксированной комбинации оцифрованных сигналов микрофонов из принимающей схемы 103. В примере согласно фиг. 1, опорный процессор 105 генерирует три ортогональных собственных луча.
В этом примере, три микрофона решетки микрофонов являются направленными микрофонами, в частности, однонаправленными кардиоидными микрофонами, которые расположены так, что основное усиление соответствует направлению наружу от периметра, образуемого путем соединения положений микрофонов (а значит - наружу от окружности круговой решетки в данном конкретном примере). Использование однонаправленных кардиоидных микрофонов обеспечивает преимущество, заключающееся в том, что чувствительность к шуму датчиков и рассогласованиям датчиков значительно снижена. Вместе с тем, следует понять, что в других сценариях можно использовать микрофоны других типов, такие, как всенаправленные микрофоны.
Если обозначить отклики трех кардиоидных микрофонов как 



при этом

где θ и ϕ - углы возвышения и азимута в стандартных сферических координатах, с - скорость звука, а xi и yi - координаты x и y i-го микрофона.
Используя выражения:

и
где r - радиус, можем записать:

Из трех кардиоидных микрофонов можно определить три ортогональных собственных луча, пользуясь выражением:

Для длин волн, которые больше, чем размер решетки, отклики собственных лучей являются инвариантными по частоте и идеально равны следующим значениям:
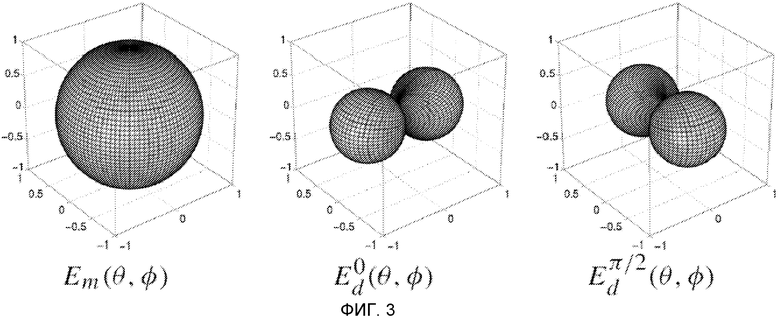
Диаграммы направленности этих собственных лучей изображены на фиг. 3.
Собственный луч Em нулевого порядка представляет собой отклик монополя, соответствующий сфере, а другие собственные лучи представляют собой собственные лучи первого порядка, соответствующие сдвоенным сферам, как показано на фиг. 3. Таким образом, собственные лучи первого порядка являются ортогональными диполями.
Результирующие сигналы от каждого из трех собственных лучей подаются в диаграммообразующую схему 107, которая переходит к адаптивному комбинированию этих сигналов, чтобы обеспечить желательную диаграмму направленности.
В частности, посредством подходящего комбинирования собственных лучей первого порядка, можно управлять положением диполя с достижением любого угла φs. Например, можно генерировать взвешенную сумму ортогональных диагоналей:

где φs представляет желательный угол для результирующего диполя.
Тогда управляемый по положению и масштабируемый отклик сверхнаправленного микрофона может быть получен путем комбинирования управляемого по положению диполя с монополем, например, следующим образом:

где α<1 - это параметр для управления диаграммой направленности отклика первого порядка, а S - произвольный масштабный коэффициент (который также может иметь отрицательные значения).
Таким образом, диаграммообразующая схема 107 может генерировать подходящую диаграмму направленности посредством подходящей комбинации опорных собственных лучей. Диаграммообразующая схема 107 выполнена с возможностью генерирования номинального (например, единичного) усиления в направлении полезного громкоговорителя, идущем с произвольного азимутального угла Φ=φs. Направление желательного громкоговорителя предполагается известным диаграммообразующей схеме 107. Следует понять, что в рамках сущности изобретения можно использовать любой подходящий способ определения полезного направления. Например, можно использовать фиксированное направление, или можно использовать, например, алгоритм слежения для полезного громкоговорителя или источника звука. Следует понять, что специалисту в данной области техники известны многие различные алгоритмы для определения полезного направления на источник звука.
Диаграммообразующая схема 107 также выполнена с возможностью адаптации луча таким образом, что чувствительность к диффузионному шуму минимизируется, а в оцененном направлении на предполагаемый мешающий точечный источник генерируется провал. Система согласно фиг. 1, в частности, выполнена с возможностью адаптации комбинации опорных собственных лучей таким образом, что номинальное усиление обеспечивается в полезном направлении, провал генерируется в направлении, оцененном как соответствующее направлению на помеху из точечного источника и с минимизацией диффузионного шума при этих ограничениях. Это достигается посредством весьма эффективного коэффициента адаптации, который будет описан ниже.
Диаграммообразующая схема 107, в частности, подключена к оценивающей схеме 109, которая определяет оценку для направления на помеху из предполагаемого точечного источника. На основании оцененного направления, диаграммообразующая схема 107 генерирует параметры комбинирования, предназначенные для комбинирования собственных лучей, таким образом, что в оцененном направлении генерируется провал (в типичном случае - ее нуль). Вместе с тем, комбинирование трех собственных лучей обеспечивает достаточно степеней свободы, чтобы предоставить диапазон решения для ограничения, соответствующего выдаче номинального усиления в желательном направлении и выдаче провала в направлении помех. В системе эта дополнительная степень свободы используется для улучшения рабочих показателей диффузионного шума. В частности, это достигается посредством параметров комбинирования, выбираемых для минимизации меры стоимости направленности, причем мера стоимости направленности характеризует соотношение между усилением по мощности или энергии в первом направлении и средним усилением по мощности или энергии. В частности, мера стоимости направленности может характеризовать усиление в желательном направлении по отношению к среднему усилению результирующего луча, при этом усреднение проводят по всем углам в азимутальной плоскости (т.е. от 0 до 2π), или по всем направлениям из трех направлений. Таким образом, мера стоимости направленности является функцией, которая указывает ослабление пространственно однородного диффузионного шума (т.е., один и тот же уровень шума в любом направлении), обеспечиваемой диаграммой направленности.
Оценивающая схема 109, в частности, выполнена с возможностью определения угла помеховой (мешающей) точки посредством поиска локальных минимумов меры мощности для выходного сигнала. Таким образом, оценивающая схема 109 стремится минимизировать мощность выходного сигнала, поскольку это будет соответствовать наименьшему шуму или наименьшим помехам. В некоторых вариантах осуществления, оценивание можно осуществлять лишь тогда, когда источник желательного звука неактивен (например, когда желательный громкоговоритель молчит), но следует понять, что для минимизации мощности выходного сигнала не является обязательным условием то, что она характеризует операцию, оптимальную по шуму или помехам (в частности, присутствие желательного сигнала может вносить смещение в меру мощности, но не будет при этом изменять положение минимума).
Оценивающая схема 109 определяет по меньшей мере два локальных минимума посредством поиска по меньшей мере в двух интервалах углов. Оба интервала углов, как правило, являются несмежными, хотя в некоторых вариантах осуществления может происходить некоторое перекрытие. Локальные минимумы определяются в разных интервалах углов посредством параллельной обработки на основании разных углов. В частности, оценивающая схема 109 может копировать работу диаграммообразующей схемы 107 и оценивать результирующий выходной сигнал для разных углов в разных интервалах углов. Тогда оценивающая схема 109 может выбирать один из углов, которые, как обнаружилось, соответствуют локальным минимумам для выходных сигналов, а потом выбранный угол используется в качестве оценки для предполагаемого одноточечного источника помех. Затем выбранный угол подается в диаграммообразующую схему 107, которая переходит к осуществлению комбинирования таким образом, что номинальное усиление обеспечивается в направлении полезного источника звука, а провал обеспечивается в оцененном направлении основной одноточечной помехи. Кроме того, при комбинировании используются веса, которые выбраны для дополнительной минимизации диффузионного шума. Это ограничение накладывается посредством весов, выбираемых для минимизации меры стоимости направленности.
Операция оценивания и адаптация не зависят от фактических условий шума и помех, в частности, не зависят от того, присутствует ли источник значительной одноточечной помехи или диффузионный шум. Вместе с тем, этот подход приводит к весьма эффективным рабочим показателям в широком круге сценариев, включая сценарии с отсутствием одноточечных помех и отсутствием диффузионного шума, а также сценарии с отсутствием одноточечных помех, но с существенным диффузионным шумом. В самом деле, этот подход и заложенные в его основу допущения приводят к операции, не только адаптируемой к конкретным характеристикам шума и характеристикам одноточечных помех, но и адаптируемой к типу воспринимаемого сценария шума или помех. Это также обеспечивает повышенную гибкость и широкое применение данного подхода.
Ниже будет описан конкретный пример системы согласно фиг. 1.
В этом примере, диаграммообразующая схема 107 воплощает подавитель боковых лепестков, а локальные минимумы определяются с использованием градиентного поиска в пределах каждого интервала углов. Как только оценено направление на предполагаемую одноточечную помеху, параметры комбинации, выражаемые весами, применяемыми к шумовым опорным сигналам, определяются при ограничении, заключающемся в том, что мера стоимости направленности минимизируется.
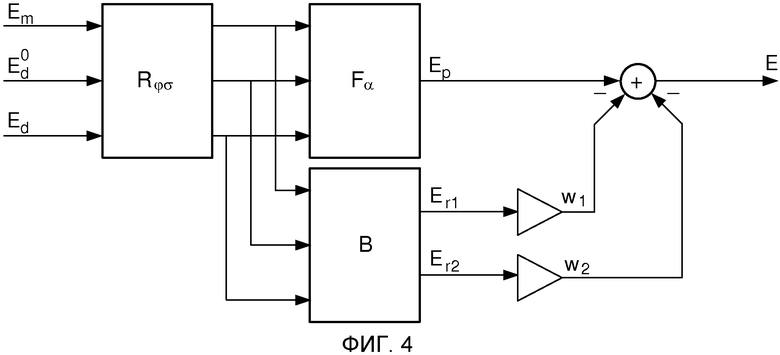
Фиг. 4 иллюстрирует пример обобщенного подавителя боковых лепестков, используемого в системе согласно фиг. 1. Два опорных луча диполей сначала комбинируются, чтобы генерировать два диполя, которые проходят под углами в желательных направлениях. Результирующие диполи затем комбинируются с монополем, чтобы генерировать основной сигнал, который соответствует лучу, направленному на полезный источник аудиосигналов.
Основной отклик может быть задан следующим образом:

где

и
Таким образом, основной сигнал соответствует желательному аудиосигналу, а также содержит сигналы с желательных направлений. Влияние этих боковых лепестков уменьшается путем генерирования шумовых опорных сигналов, которые взвешиваются и вычитаются из основного сигнала для генерирования выходного сигнала.
Таким образом, подавитель боковых лепестков генерирует шумовые опорные сигналы, задаваемые следующим образом:
где B - блочная матрица, задаваемая следующим образом:

Отметим, что шумовые опорные сигналы являются, соответственно, откликами кардиоиды и диполя, а нуль характеристики повернут к основному сигналу с азимутом φs и возвышением θ=π/2.
Затем оба шумовых опорных сигнала взвешивают посредством весов w1 и w2 перед вычитанием из основного сигнала для выдачи выходного сигнала. Таким образом, вся диаграмма направленности из подавителя боковых лепестков задается следующим образом:

Диаграммообразующая схема 107 выполнена с возможностью генерирования номинального усиления, в дальнейшем - единичного усиления, под желательным углом φs и провала, в частности, нуля, в направлении предполагаемой одноточечной помехи, определяемом посредством оценивающей схемы 109.
При единичном усилении в направлении φs, веса, требуемые для управления нулем путем поворота на угол φn, можно вычислить, решая следующее уравнение:

где φ=φSφn.
Решение этого уравнения дает:
или в альтернативном варианте:

Как можно заметить, ограничения единичного усиления и направления нуля характеристики неоднозначно определяют требуемые веса, но обеспечивают дополнительную степень свободы.
В системе эта степень свободы используется для оптимизации рабочих показателей диффузионного шума. В частности, опорные веса шума выбирают так, что мера стоимости направленности минимизируется.
Подходящая мера стоимости направленности задается следующим образом:
Таким образом, мера стоимости направленности представляет собой соотношение между усилением в желательном направлении и совокупным усилением (по мощности), усредненным по всей сфере. Должно быть ясно, что в других вариантах осуществления усреднение усиления можно проводить, например, только в двумерной плоскости, такой, как азимутальная плоскость.
Для отклика, задаваемого выражением

можно показать, что этот отклик соответствует выражению
Вставляя отклик выходного сигнала, заданного как

а вставляя значение w1, заданного как
в меру стоимости направленности, дифференцируя относительно w2 и устанавливая результат в нуль, можно определить минимумы меры стоимости направленности относительно w2. Таким образом, можно определить значение w2, для которого мера стоимости направленности минимизируется, а значит и чувствительность к диффузионному шуму минимизируется. Это, в частности, дает:
С помощью этого значения w2, может также вычислить w1 как:
Таким образом, можно вычислить w1 и w2 так, что единичное усиление обеспечивается в желательном направлении, а нуль - в направлении предполагаемого источника помех, и при этих ограничениях максимизируется ослабление диффузионного шума.
Следовательно, как только оценивающая схема 109 определила подходящую оценку угла для предполагаемого точечного источника помех, выведенные уравнения можно использовать для вычисления подходящих весов, которые также будут минимизировать меру стоимости направленности, а значит и оптимизировать рабочие показатели диффузионного шума.
Вместо использования ранее выведенного уравнения для w1, можно использовать значение, скомпенсированное по воздействию параметра проектирования:
Можно показать, что тогда w2 можно вывести из выражения:

Таким образом, выходной сигнал y[k] задается следующим образом:

при этом

где обозначена оценка угла предполагаемого источника нежелательных помех и φs - угол источника желательных аудиосигналов.
Оценивающая схема 109 переходит к определению оценки направления путем минимизации меры мощности для выходного сигнала в разных интервалах углов.
В частности, оценивающая схема 109 пытается минимизировать функцию стоимости, задаваемую следующим образом:
где обозначено ожидаемое значение.
Фиг. 5 иллюстрирует несколько примеров функции стоимости для сценария, в котором имеется одноточечный источник помех на направлении, соответствующем углу φ, равному 1, 2 и 3 радианам, соответственно (т.е., разность углов φ между желательным направлением и направлением на фактический источник помех составляет 1, 2 и 3 радиана, соответственно. Функция стоимости показана как функция оцененного направления, т.е. как функция управления положением нуля, которое выполняется с помощью весов опорных сигналов. Фиг. 6 иллюстрирует функцию стоимости в присутствии шума, который может быть либо сферическим (поступающим со всех направлений), либо цилиндрическим (поступающим со всех направлений в двумерной плоскости). Ситуация сферического шума показана сплошной линией, а ситуация цилиндрического шума показано пунктирной линией.
Исходя из фиг. 5 можно провести некоторые наблюдения. Во-первых, ясно, что во всех ситуациях провал (в частности, нуль) существует для верной оценки, т.е., когда 
Это можно заметить также на фиг. 6, где иллюстрируются локальные минимумы функции стоимости для разных направлений φ фактического точечного источника помех. И опять, можно заметить, что существует локальный минимум для корректного значения (т.е. для него существует минимум
Однако дальнейшее наблюдение показывает, что корректный минимум всегда является единственным локальным минимумом в интервале фаз либо от 0 до π, либо от π до 2π. Таким образом, для угла источника помех в пределах интервала [0; π], единственный локальный минимум в интервале [0; π] является корректным значением. Аналогично, для угла источника помех в пределах интервала [π; 2π] единственный локальный минимум в интервале [π; 2π] является корректным значением.
Эта реализация применяется в системе согласно фиг. 1. В частности, оценивающая схема 109 выполнена с возможностью определения локального минимума в интервале углов [π; 2π]. Таким образом, оценивающая схема 109 определяет углы, для которых функция стоимости, соответствующая мощности выходного сигнала, минимизируется. Этот подход гарантирует, что один из локальных минимумов будет соответствовать корректному оцененному углу.
Затем оценивающая схема переходит к выбору одного из двух оцененных значений в качестве оцененного угла, который используется для управления формированием главных лепестков посредством схемы 107 формирования главных лепестков. Таким образом, один из локальных минимумов выбирается и используется для вычисления весов для шумовых опорных сигналов с помощью уравнений, которые также оптимизируют рабочие параметры диффузионного шума.
Должно быть ясно, что можно использовать другие критерии для выбора между определенными локальным минимумами. Например, в некоторых вариантах осуществления можно применить простое формирование диаграммы направленности для сигналов микрофонов, так что луч формируется в каждом из двух направлений, чтобы измерить уровень помех в этих направлениях. Направление, имеющее наивысший уровень, затем выбирается как соответствующее наиболее доминантной помехе.
Вместе с тем, в конкретном примере, выбор корректных локальных минимумов основан на градиенте функции стоимости при конкретном угле, который разделяет два интервала углов (т.е. находится на границе между двумя интервалами углов, а в частности - может быть конечной точкой одного или обоих интервалов). В конкретном примере, для выбора подходящего локального минимума определяется и используется градиент при угле π. В частности, если функция стоимости имеет положительный градиент для 
Интуитивно можно понять следующее. Направленная диаграмма направленности для
Следует также отметить, что в некоторых вариантах осуществления можно определить все локальные минимумы рассматриваемой функции и разделить их на два интервала углов. В самом деле, в таком варианте осуществления обнаружение двух локальных минимумов в одном интервале может автоматически привести к выбору другого минимума (т.е. минимума в другом интервале). Этот подход основан на осознании того, что (как проиллюстрировано на фиг. 6), корректный локальный минимум будет единственным локальным минимумом в интервале углов. Также должно быть ясно, что это ведет к выводу, заключающемуся в том, что не нужно идентифицировать более одного минимума в каждом интервале углов, поскольку любые не идентифицированные локальные минимумы по сути своей не будут корректным минимумом, так окажутся в интервале углов, где больше одного минимума.
В системе согласно фиг. 1 определение локальных минимумов осуществляется путем проведения градиентного поиска в каждом интервале углов.
Таким образом, оценивающая схема 109 проводит операцию подавления боковых лепестков, соответствующую операции схемы 107 формирования диаграммы направленности, используя при этом входное значение угла, которое постоянно обновляется и смещается в направлении, соответствующем уменьшению функции стоимости. Этот подход приведет к переменной угла, оканчивающейся в локальном минимуме.
В частности, уравнения обновления по методу наискорейшего спуска для φ можно вывести путем придания пошагового приращения в направлении, противоположном поверхности функции стоимости по отношению к φ:

при этом градиент задается следующим образом:
где µ - размер шага обновления, причем 0<µ<1.
На практике, среднее значение получить не удается, и поэтому используют мгновенную оценку градиента
Можно показать, что процесс вставления ранее выведенных формул для y[k] и взятия производной приведет к следующему выражению:

где

Таким образом, обновленное значение для входной переменной угла градиентного поиска является функцией выходного сигнала подавителя боковых лепестков и первого и второго шумовых опорных сигналов.
В вышеизложенном примере обновленное значение зависит от мощности опорных шумовых сигналов. Чтобы компенсировать это, оценивающая схема 109 может определить оценку мощности для одного или обоих шумовых опорных сигналов и соответственно нормализовать обновленное значение.
Следовательно, можно использовать следующее уравнение обновления для градиентного поиска:

где ε - малая величина для предотвращения деления на ноль, являющаяся оценкой мощности i-го шумового опорного сигнала.
В частности, это можно вычислить путем рекурсивного усреднения

где β - подходящий параметр конструкции.
Таким образом, для каждого интервала углов, оценивающая схема 109 задействует подавитель боковых лепестков применительно к тем же сигналам, что и подавитель боковых лепестков схемы 107 формирования диаграммы направленности. Вместе с тем, эти подавители боковых лепестков задействуются на основании входной переменной угла, которая соответствует текущей оценке угла на предполагаемый точечный источник помех. Входная переменная угла непрерывно обновляется с использованием метода градиентного поиска, так что эта переменная будет сходиться к локальному минимуму в интервале углов.
Затем оценивающая схема 109 выбирает текущие значение входных переменных угла и использует этот результат в качестве оцененного угла для предполагаемого точечного источника помех. Выбор основан на градиенте функции стоимости для значения π входной переменной. В частности, оценивающая схема 109 может конкретно определить это, осуществляя обработку входных сигналов дополнительным подавителем боковых лепестков, но с фиксированным значением угла, равным π. В частности, оценивающая схема 109 может непрерывно оценивать обновляемое значение
для φ=π. Выведенные значения можно усреднить по времени, а потом использовать знак усредненного значения (т.е. градиент функции стоимости при угле π) для того, чтобы выбрать, который из углов, определенных посредством поисков градиента, следует учитывать.
Должно быть ясно, что, хотя предшествующее рассмотрение демонстрировало предлагаемый принцип применительно к использованию четырех подавителей боковых лепестков (одного - для схемы 107 формирования диаграммы направленности, по одному - для каждого градиентного поиска, и одного - для определения градиента при угле π), это сделано лишь для иллюстрации принципа. В самом деле, во многих вариантах осуществления тот же самый подавитель боковых лепестков можно воплотить, например, как подпрограмму и использовать для разных целей и при разных входных углах.
Должно быть также ясно, что в типичном случае схема 107 формирования диаграммы направленности не будет повторять работу подавителя боковых лепестков для оцененного угла, а будет непосредственно использовать выходной сигнал, вычисленный для выбранного угла при проведении оценивания.
В этом примере, градиентный поиск выполняется для повторной инициализации градиентного поиска, если входная переменная угла выходит из соответствующего интервала углов. В частности, повторную инициализацию градиентного поиска можно осуществлять, если два градиентных поиска достигают сценария, при котором оба имеют значения угла в одном и том же интервале углов. Например, если во время градиентного поиска в интервале [0; π] обновленное значение угла выходит в интервал [π; 2π], так что оба градиентных поиска имеют текущие значения в пределах этого интервала, градиентный поиск инициализируется повторно. В частности, повторную инициализацию осуществляют, возвращая значение входной переменной угла к начальному значению для одного из двух градиентных поисков. Начальное значение может быть, например, фиксированным значением, таким, как соответствующее средней точке в интервале (т.е., π/2 и 3π/2).
Из фиг. 6 можно заметить, что квадрант, релевантный для градиентного поиска в интервале [0; π], является нижним левым квадрантом. Для градиентного поиска в интервале [π; 2π], релевантным является правый верхний квадрант.
Далее, рассматривая нижний левый квадрант на предмет градиентного поиска в интервале [0; π], из фиг. 6 и фиг. 7 (где показаны, соответственно, минимумы и максимумы функции стоимости) можно заметить, что повторная инициализация в этом интервале привела бы лишь к корректной сходимости 
Когда повторная инициализация должна проходить при значениях, превышающих η, существует риск, что градиентный поиск опять закончится в неверном квадранте, т.е. в верхнем левом квадранте. В частности, когда угол φ равен или близок к нулю, повторную инициализацию обязательно следует проводить в диапазоне [0; η], где η≈2,55.
Поэтому для повторной инициализации надежным является выбор средней точки в интервале [0; η] (т.е. η/2), где η≈2,55.
Конкретный пример подхода, который можно использовать, иллюстрируется на фиг. 8. На этапе 801 инициализируют значения параметров.
За этапом 801 следует этап 803, на котором гарантируется, что
За этапом 803 следует этап 805, на котором определяют, получены ли в результате поисков градиента значения углов
За этапом 805 следует этап 807, на котором вычисляют веса для шумовых опорных сигналов, результирующий выходной сигнал и градиенты функции стоимости.
За этапом 807 следует этап 809, на котором вычисляют новые значения для входных переменных
За этапом 809 следует этап 811, на котором выбирают значение угла на основании градиента отфильтрованной функции стоимости при угле π.
За этапом 811 следует этап 813, на котором обновляют оценки мощности для шумовых опорных сигналов, используемые при определении обновленных значений.
После этапа 813 способ возвращается к этапу 803 для обработки следующей выборки.
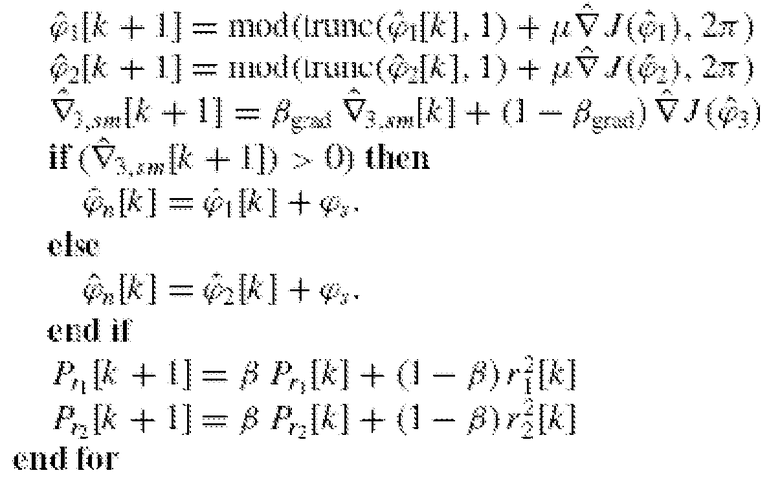
Псевдокод алгоритма, соответствующего фиг. 1, можно представить в следующем виде:

В конкретном примере, количество микрофонов в решетке 101 микрофонов соответствовало количеству опорных главных лепестков (т.е. трем). Однако в некоторых варрантах осуществления решетка микрофонов может содержать микрофонов больше, чем опорных лучей.
В частности решетка 101 микрофонов может содержать по меньшей мере четыре микрофона. Система может по-прежнему генерировать три опорных луча и может, в частности, быть выполнена с возможностью комбинирования сигналов по меньшей мере из двух микрофонов перед генерированием опорных лучей. Таким образом, опорный процессор 105 по-прежнему может принимать только три входных сигнала и генерировать эти опорные лучи из таких сигналов. Вместе с тем по меньшей мере один из этих входных сигналов можно генерировать путем комбинирования (а в частности - усреднения или сложения (например, посредством взвешенного суммирования)) сигналов по меньшей мере из двух микрофонов. Такой подход может обеспечить улучшенные рабочие показатели шума во многих сценариях, поскольку можно усреднять уровень некоррелированного шума. Кроме того, использование большего количества микрофонов на конкретной площади имеет преимущество, заключающееся в том, что пространственное наложение будет происходить на более высокой частоте.
Следует понять, что в вышеуказанном описании варианты осуществления - для ясности - изложены со ссылками на различные функциональные схемы, блоки и процессоры. Вместе с тем, должно быть ясно, что, не выходя за рамки изобретения, можно использовать любое подходящее распределение выполняемых функций между различными функциональными схемами, блоками или процессорами. Например, выполняемые функции, проиллюстрированные для случая выполнения их отдельными процессорами или контроллерами, могут выполняться одним и тем же процессором или контроллером. В данном случае ссылки на конкретные функциональные блоки или схемы следует рассматривать лишь как ссылки на подходящие средства для обеспечения описанных выполняемых функций, а не как характеристику жесткой логической или физической структуры или организации.
Изобретение может быть воплощено в любой подходящей форме, включая аппаратные средства, программные средства, программно-аппаратные средства или любую комбинацию этих средств. По выбору, выполняемые функции можно воплощать, по меньшей мере - частично, в форме программного обеспечения компьютера для работы на одном или нескольких процессорах данных и/иди процессорах цифровых сигналов. Элементы и компоненты варианта осуществления изобретения могут быть физически, функционально и логически воплощены любым подходящим образом. В самом деле, выполняемые функции можно воплощать в единственном блоке, во множестве блоков или как часть других функциональных блоков. Как таковое, изобретение может быть воплощено в единственном блоке или может быть физически, логически и функционально распределено между разными блоками, схемами или процессорами.
Хотя данное изобретение описано в связи с некоторыми вариантами осуществления, не следует считать его ограничиваемым конкретной формой, приведенной здесь. Наоборот, объем притязаний данного изобретения ограничивается лишь прилагаемой формулой изобретения. Кроме того, хотя признак может описываться в связи с конкретными вариантами осуществления, специалисту в данной области техники должно быть ясно, что - в соответствии с изобретением - различные признаки описанных вариантов осуществления можно объединять. В формуле изобретения термин «содержащий(ая, ее)» не исключает другие элементы или этапы.
Помимо этого, хотя они и перечисляются по отдельности, множество средств, элементов, схем или этапов способа могут быть воплощены, например, одной схемой, одним блоком или процессором. Кроме того, хотя индивидуальные признаки могут быть включены в разные пункты формулы изобретения, возможно их комбинирование, а включение в разные пункты формулы изобретения не означает, что совокупность этих признаков нежизнеспособна и/или не выгодна. Также отметим, что включение некоторого признака в одну категорию пунктов формулы изобретения не влечет за собой наложение ограничения на эту категорию, а вместо этого указывает, что данный признак с тем же успехом применим как подходящий к другим категориям пунктов формулы изобретения. Помимо этого, порядок следования признаков в пунктах формулы изобретения не означает необходимость следовать какому-либо конкретному порядку, в котором признаки должны быть воплощены, в частности, порядок отдельных этапов в пункте на способ не означает, что этапы обязательно должны выполняться в этом порядке. Наоборот, этапы можно выполнять в любом подходящем порядке. Кроме того, признаки единственного числа не исключают множество. Так, использование единственного числа, а также порядковых числительных «первый», «второй» и т.д., не исключают множество. Ссылочные позиции в пунктах формулы изобретения предусмотрены просто в качестве поясняющего примера, так что их ни в коем случае не следует считать ограничивающими объем притязаний изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ АУДИОИСТОЧНИКА | 2011 |
|
RU2565338C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ФОРМИРОВАНИЯ ЛУЧА С ИСПОЛЬЗОВАНИЕМ МИКРОФОННОЙ РЕШЕТКИ | 2005 |
|
RU2369042C2 |
| УЛУЧШЕНИЕ СИГНАЛА ВЕКТОРА БЛИЖНЕГО ПОЛЯ | 2007 |
|
RU2434262C2 |
| ЗВУКОЗАПИСЬ С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2017 |
|
RU2758192C2 |
| РОБАСТНАЯ СИСТЕМА ПОДАВЛЕНИЯ ШУМА С ДВУМЯ МИКРОФОНАМИ | 2008 |
|
RU2483439C2 |
| ЗАХВАТ АУДИО С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2018 |
|
RU2751760C2 |
| ЗВУКОЗАПИСЬ С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2017 |
|
RU2759715C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАХВАТА АУДИОИНФОРМАЦИИ С ИСПОЛЬЗОВАНИЕМ ФОРМИРОВАНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ | 2017 |
|
RU2760097C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2408025C2 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ЗВУКОВЫХ СИГНАЛОВ | 2009 |
|
RU2542586C2 |
Группа изобретений относится к акустике. Устройство для формирования диаграммы направленности аудиосигналов содержит принимающую схему для приема сигналов из по меньшей мере двумерной решетки микрофонов, опорную схему, которая генерирует по меньшей мере три опорных луча, и комбинирующую схему, формирующую выходной сигнал, соответствующий желательной диаграмме излучения, путем комбинирования опорных лучей. Оценивающая схема генерирует оценку направления посредством определения углов, соответствующих локальным минимумам для меры мощности выходного сигнала по меньшей мере в первом и соответственно втором интервалах углов. Оценка направления генерируется путем выбора одного из углов. Комбинирующая схема определяет параметры, чтобы обеспечить провал в угле, соответствующем оценке направления, и минимизацию меры стоимости направленности, причем мера стоимости направленности характеризует соотношение между усилением в первом направлении и усредненным по энергии усилением. Технический результат - повышение эффективности управления и качества звука. 3 н. и 12 з.п. ф-лы, 8 ил.
1. Устройство для формирования диаграммы направленности аудиосигналов, содержащее:
принимающую схему (103) для приема сигналов из по меньшей мере двумерной решетки (101) микрофонов, содержащей по меньшей мере три микрофона,
опорную схему (105) для генерирования по меньшей мере трех опорных лучей из сигналов микрофонов,
комбинирующую схему (107) для генерирования выходного сигнала, соответствующего желательной диаграмме направленности, путем комбинирования опорных лучей в ответ на первое направление полезного источника звука и оценку направления для мешающего источника звука,
оценивающую схему (109) для генерирования оценки направления посредством:
определения первого угла, соответствующего локальному минимуму для меры мощности выходного сигнала в первом интервале углов,
определения второго угла, соответствующего локальному минимуму для меры мощности выходного сигнала во втором интервале углов, и
определения оценки направления как угла, выбранного из набора углов, соответствующих локальным минимумам для меры мощности выходного сигнала, причем набор углов содержит по меньшей мере упомянутые первый угол и второй угол, и
при этом комбинирующая схема (107) выполнена с возможностью определения параметров комбинирования, предназначенных для комбинирования опорных лучей, чтобы обеспечить провал в угле, соответствующем оценке направления, и минимизацию меры стоимости направленности, причем мера стоимости направленности характеризует соотношение между усилением в первом направлении и средним усилением.
2. Устройство по п. 1, в котором оценивающая схема (109) выполнена с возможностью выбора оценки направления как одного из первого угла и второго угла в ответ на градиент меры мощности выходного сигнала как функции оценки направления для угла, разделяющего первый интервал углов и второй интервал углов.
3. Устройство по п. 1, в котором первый интервал углов содержит углы от 0 до π, а второй интервал углов содержит углы от π до 2π.
4. Устройство по п. 3, в котором оценивающая схема (109) выполнена с возможностью выбора оценки направления как одного из первого угла и второго угла в ответ на градиент меры мощности выходного сигнала как функции оценки направления для угла π.
5. Устройство по п. 1, в котором комбинирующая схема (107) содержит подавитель боковых лепестков.
6. Устройство по п. 5, в котором подавитель боковых лепестков выполнен с возможностью генерирования выходного сигнала как взвешенной комбинации по меньшей мере основного сигнала, первого шумового опорного сигнала и второго шумового опорного сигнала.
7. Устройство по п. 6, в котором комбинирующая схема (107) выполнена с возможностью вычисления весов для первого и второго шумовых опорных сигналов в ответ на оценку направления и минимизацию меры стоимости направленности.
8. Устройство по п. 5, в котором оценивающая схема (109) выполнена с возможностью определения по меньшей мере одного из первого и второго углов путем градиентного поиска, применяемого для подавителя боковых лепестков, соответствующего подавителю боковых лепестков комбинирующей схемы и имеющего входную переменную угла.
9. Устройство по п. 8, в котором обновленное значение для входной переменной угла определяется как функция выходного сигнала подавителя боковых лепестков для текущего значения фазы входной переменной угла, а также первого и второго шумовых опорных сигналов подавителя боковых лепестков для текущего значения фазы.
10. Устройство по п. 9, в котором первый и второй шумовые опорные сигналы взвешиваются как функция текущего значения фазы.
11. Устройство по п. 9, в котором оценивающая схема (109) выполнена с возможностью определения оценки мощности по меньшей мере для одного из первого и второго шумовых опорных сигналов и осуществления нормализации обновленного значения как функции этой оценки мощности.
12. Устройство по п. 1, в котором упомянутая по меньшей мере двумерная решетка микрофонов содержит по меньшей мере четыре микрофона, а устройство содержит схему для комбинирования сигналов по меньшей мере двух из упомянутых по меньшей мере четырех микрофонов перед генерированием опорных лучей.
13. Устройство по п. 1, дополнительно содержащее упомянутую по меньшей мере двумерную решетку (101) микрофонов, причем эта по меньшей мере двумерная решетка (101) микрофонов содержит направленные микрофоны, имеющие максимальный отклик в направлении наружу от периметра упомянутой по меньшей мере двумерной решетки микрофонов.
14. Способ формирования диаграммы направленности аудиосигналов, заключающийся в том, что:
осуществляют прием сигналов из по меньшей мере двумерной решетки микрофонов, содержащей по меньшей мере три микрофона,
генерируют по меньшей мере три опорных луча из сигналов микрофонов,
генерируют выходной сигнал, соответствующий желательной диаграмме излучения, путем комбинирования опорных лучей в ответ на первое направление полезного источника звука и оценку направления для мешающего источника звука,
генерируют оценку направления посредством:
определения первого угла, соответствующего локальному минимуму для меры мощности выходного сигнала в первом интервале углов,
определения второго угла, соответствующего локальному минимуму для меры мощности выходного сигнала во втором интервале углов, и
определения оценки направления как угла, выбранного из набора углов, соответствующего локальным минимумам для меры мощности выходного сигнала, причем этот набор содержит по меньшей мере упомянутые первый угол и второй угол; и при этом комбинирование опорных лучей включает в себя определение параметров комбинирования, предназначенных для комбинирования опорных лучей, чтобы обеспечить провал в угле, соответствующем оценке направления, и минимизацию меры стоимости направленности, причем мера стоимости направленности указывает соотношение между усилением в первом направлении и усредненным по энергии усилением.
15. Носитель информации, хранящий компьютерную программу, обеспечивающую осуществление способа по п. 14 процессором.
| US 20040175006 A1, 08.09.2004 | |||
| Yoshifumi Nagata and Masato Abe | |||
| Two-Channel Adaptive Microphone Array with Target Tracking // Electronics and Communications in Japan, Part 3, Vol | |||
| Пуговица | 0 |
|
SU83A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Yasuhiko Okuma | |||
| Design of Broadband Beamformers Robust Against Gain and Phase Errors in the Microphone Array Characteristics // IEEE TRANSACTIONS | |||

