Настоящее изобретение относится к техническим решениям для правоохранительных органов и служб безопасности и более конкретно - к способам и системам для определения координат точки выстрела или пуска (далее "выстрел") сверхзвукового объекта и направления его полета на основе информации только об ударной волне.
Известны системы и способы, с помощью которых можно определить обобщенное направление и траекторию пущенного сверхзвукового объекта, например пули или артиллерийского снаряда (далее "снаряд"), измеряя параметры ударной волны, излучаемой таким пущенным объектом. Одна из таких систем, описанная в патенте США №5241518 содержит по меньшей мере три разнесенных датчика, каждый из которых содержит три акустических преобразователя, лежащих в некоторой плоскости. В ответ на ударную волну датчики вырабатывают сигналы, содержащие информацию, относящуюся к азимуту и углу возвышения точки возникновения ударной волны. Измерения параметров только ударной волны не позволяют определить расстояние между датчиком(ами) и точкой возникновения ударной волны. Информацию о расстоянии обычно получают по вспышке на дульном срезе или по измерению дульной волны.
Азимут и угол возвышения точки выстрела по отношению к положению датчика в большинстве случаев определяют, измеряя каждым датчиком время прихода ударной волны. Ударная волна приходит в каждый датчик в разное время, и датчики вырабатывают сигналы, соответствующие давлению ударной волны. В результате обработки сигналов от разных датчиков можно определить направление (азимут и угол возвышения) от датчика на точку возникновения ударной волны и, соответственно, траекторию полета снаряда.
В известных системах используются микрофоны, которые могут быть размещены сравнительно близко друг от друга (например, на расстоянии 1 м) или же удалены друг от друга (например, могут быть смонтированы на транспортных средствах или могут носиться солдатами на поле боя), причем каждый микрофон, имеющий ненаправленную диаграмму направленности, измеряет давление ударной волны в точке его нахождения. Одна типичная антенна содержит семь ненаправленных микрофонов, шесть из которых распределены по поверхности сферы, имеющей диаметр около 1 м, а седьмой микрофон размещен в центре сферы. В схемах, использующих менее семи микрофонов, могут формироваться лепестки в пространственной диаграмме направленности конфигурации микрофонов.
Сравнительно большие размеры антенны и большое количество датчиков может представлять существенный недостаток, например, в случае размещения системы на транспортном средстве. Кроме того, известные системы реагируют на звуковое давление, и следовательно, в них должны использоваться специальные фильтры верхних и нижних частот для выделения сигналов ударной волны на фоне помех окружающей среды. Эти помехи могут иметь достаточно высокий уровень и даже превышать уровень звукового давления ударной волны. Кроме того, в системах, измеряющих звуковое давление с помощью антенны, имеющей ненаправленную диаграмму направленности, могут возникать неоднозначные решения, в которых времена прихода ударной волны к заданному набору датчиков почти тождественны для двух зеркально симметричных точек выстрела.
Поэтому имеется потребность в создании системы и способа, которые могли бы обеспечивать определение траектории сверхзвукового снаряда с использованием небольшого количества датчиков, занимающих мало места, а также могли бы обеспечивать выделение ударной волны на фоне шумов окружающей среды и устранение неоднозначности определения координат точки выстрела.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью описанных в заявке способов и систем (среди прочего) является обеспечение определения с помощью датчиков координат точки выстрела и траектории движения сверхзвукового снаряда на основании информации только ударной волны.
В соответствии с одним из вариантов осуществления изобретения датчик для определения градиента давления ударной волны содержит опорную конструкцию, а также примерно сферический корпус, упруго поддерживаемый опорной конструкцией с возможностью перемещения по меньшей мере в двух направлениях, и акселерометр, размещенный в сферическом корпусе и вырабатывающий сигнал в соответствии с приложенной к нему силой. Сила возникает в результате действия градиента давления, и выходной сигнал содержит информацию о величине и направлении градиента давления.
В соответствии с другим вариантом осуществления изобретения система определения траектории сверхзвукового снаряда содержит по меньшей мере два разнесенных датчика, которые поддерживаются опорной конструкцией в известном положении и на которые действует ударная волна, излучаемая сверхзвуковым снарядом. Каждый датчик содержит примерно сферический корпус, упруго поддерживаемый опорной конструкцией с возможностью перемещения по меньшей мере в двух направлениях, и акселерометр, размещенный в сферическом корпусе и вырабатывающий сигнал в соответствии с приложенной к нему силой. Эта сила возникает в результате действия градиента давления ударной волны, и выходной сигнал содержит информацию о величине и направлении градиента давления и времени прихода ударной волны к датчику; Система содержит дополнительно устройство обработки выходных сигналов и времен прихода по меньшей от двух датчиков для вычисления параметров, необходимых для определения траектории сверхзвукового снаряда.
В соответствии еще с одним вариантом осуществления изобретения способ оценки траектории сверхзвукового снаряда, создающего ударную волну, содержит следующие стадии: обеспечение по меньшей мере двух разнесенных датчиков, положение и ориентация которых известны, причем каждый датчик приспособлен для измерения трехмерного градиента давления в точке нахождения датчика. Датчики вырабатывают сигналы, содержащие информацию об ударной волне, в соответствии с измеренными градиентами давления. Способ содержит дополнительно стадии обработки информации об ударной волне и определения по сигналу, содержащему информацию об ударной волне, параметров траектории снаряда.
Варианты осуществления изобретения могут содержать один или несколько следующих признаков. Акселерометр может быть трехкоординатным акселерометром, вырабатывающим выходные сигналы, соответствующие ускорению в трех взаимно независимых направлениях, которые могут быть перпендикулярными друг к другу. Примерно сферический корпус выполнен из легкого металла, например из алюминия.
Опорная конструкция может быть рамой подходящей формы, например круглой или прямоугольной, причем корпус может удерживаться в раме с помощью проволок, нитей или лент.
Подвеска корпуса может содержать средства демпфирования. В альтернативном варианте корпус может поддерживаться упругим элементом, который обеспечивает перемещения по трем независимым направлениям, в частности для этого может использоваться пружина.
Рама и/или опорная конструкция имеет сравнительно низкую частоту собственных колебаний, например, не превышающую 1 кГц и предпочтительно не превышающую 100 Гц, чтобы не создавать помех обнаружению ударной волны.
Сигналы, содержащие информацию об ударной волне, могут содержать величину и направление градиента давления, измеренные по меньшей мере двумя датчиками, и времена прихода ударной волны к этим датчикам. Набор параметров, необходимых для определения траектории сверхзвукового снаряда, может содержать азимут точки выстрела, угол возвышения точки выстрела, азимут траектории, угол возвышения траектории, скорость на выходе из ствола и коэффициент лобового сопротивления снаряда.
Другие особенности и преимущества настоящего изобретения станут ясными из нижеприведенного описания предпочтительных вариантов осуществления изобретения и из его формулы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Некоторые иллюстративные варианты осуществления изобретения представлены на прилагаемых фигурах чертежей, на которых одинаковые ссылочные номера относятся к одинаковым элементам. Описанные варианты никоим образом не ограничивают объем изобретения и должны рассматриваться лишь только как его иллюстрации.
Фигура 1 - схема первого варианта осуществления предлагаемого в изобретении датчика, обеспечивающего измерение градиентов давления по трем ортогональным направлениям.
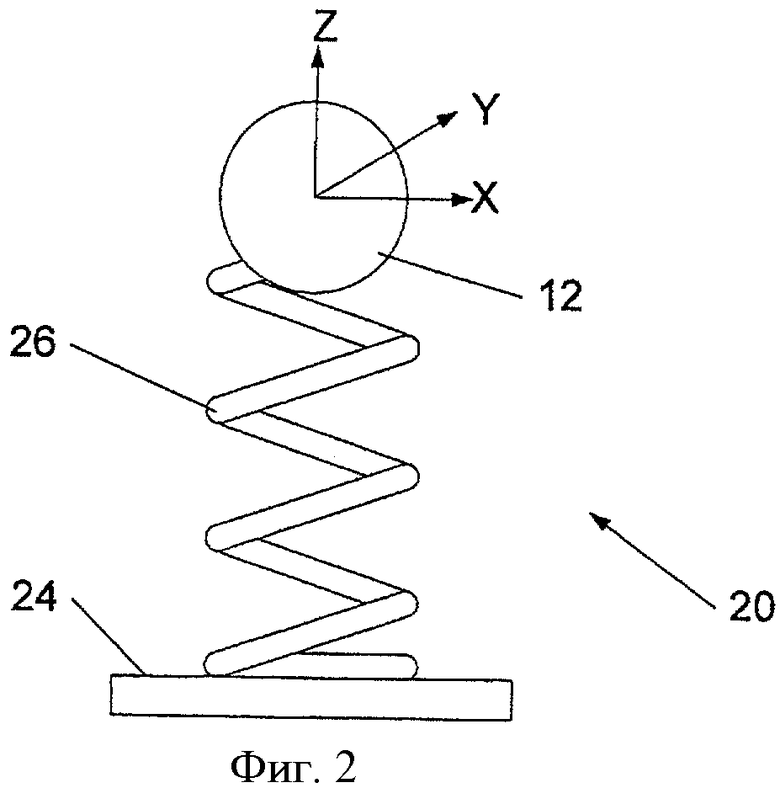
Фигура 2 - схема второго варианта осуществления предлагаемого в изобретении датчика, обеспечивающего измерение градиентов давления по трем ортогональным направлениям.
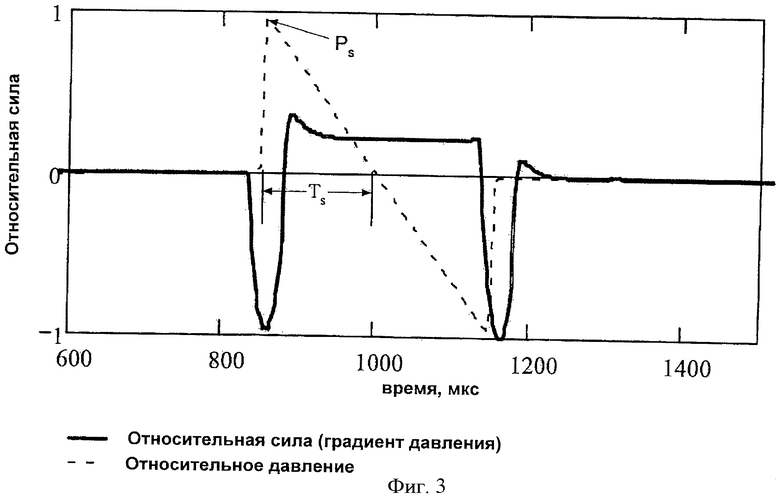
Фигура 3 - график изменения силы, действующей на датчики, представленные на фигурах 1 и 2, вызванной градиентом давления ударной волны, создаваемой летящим снарядом.
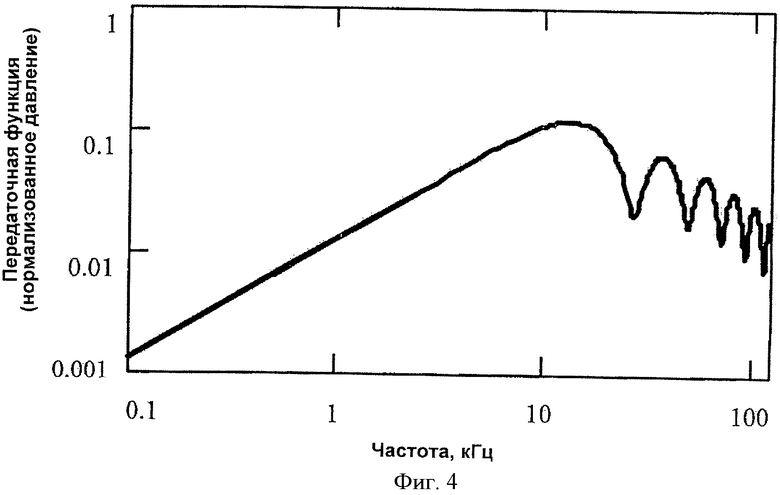
Фигура 4 - график зависимости от частоты передаточной функции датчиков, представленных на фигурах 1 и 2.
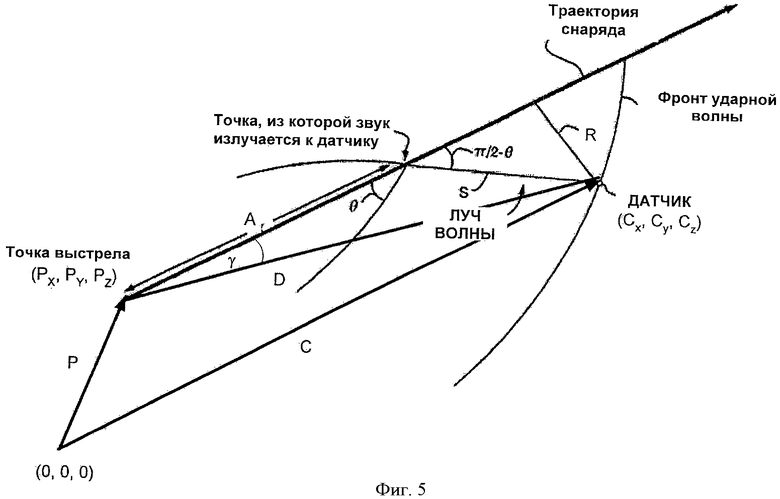
Фигура 5 - схематический вид модели времен прихода ударной волны.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Целью изобретения (среди прочего) является создание системы и способа определения направления, задаваемого азимутом и углом возвышения, на точку выстрела и траектории сверхзвукового снаряда. Система содержит два или более датчиков, в состав каждого из которых входят три акселерометра, выходные сигналы которых обрабатываются для определения единичного вектора угла прихода ударной волны, мгновенного и пикового значений давления в момент прихода ударной волны. Чувствительность датчика имеет наибольшее значение в области высоких частот, присущих ударной волне, и существенно ниже на низких частотах шумов окружающей среды.
На фигуре 1 представлен первый вариант осуществления изобретения, содержащий модуль 10 датчика, в состав которого входит рама или держатель 14, и датчик 12, подвешенный в держателе таким образом, чтобы обеспечивать возможность смещения датчика 12 по трем примерно перпендикулярным направлениям X, Y и Z (показаны стрелками). Датчик 12 содержит корпус 13, выполненный, например, из алюминия, в котором размещается трехкоординатный акселерометр, содержащий три независимых элемента 15а, 15b, 15с акселерометра, вырабатывающих три независимых сигнала, соответствующих ускорению датчика 12 по направлениям X, Y и Z, соответственно. Датчик 12 может быть подвешен в держателе 14 с помощью нитей, проволок или струн 16а, 16b. Электрические сигналы, вырабатываемые элементами 15а, 15b, 15с акселерометра могут передаваться на вход подходящего процессора сигналов по проводам (не показаны), которые могут проходить вдоль нитей подвески 16а, 16b.
На датчик 12 не действует результирующая сила, когда приложено постоянное давление, даже если величина давления изменяется. В этом случае выходные сигналы элементов акселерометра равны нулю, если не учитывать возможное постоянное смещение. Однако если к датчику 12 приложен градиент давления, то есть если давление на одной стороне сферы 12 отличается от давления на другой ее стороне, то на датчик 12 действует результирующая сила в направлении градиента давления, создавая ускорение, которое прямо пропорционально силе и обратно пропорционально массе датчика. Выходные сигналы элементов 15а, 15b, 15с акселерометра соответствуют ускорению, действующему на датчик по направлениям X, Y, Z, соответственно.
В технике известны различные типы акселерометров, например миниатюрные акселерометры из кремния, пьезоэлектрических материалов и др. Подходящим акселерометром является, например, измеритель ускорения Endevco Model 25A ISOTRON производства компании Endevco Corporation, г.Сан-Хуан-Капистрано, штат Калифорния, США. Акселерометры, которые могут использоваться, должны иметь низкую величину взаимного влияния каналов, например, менее 1% для надежного разделения сигналов, вырабатываемых по трем независимым направлениям.
Как показано на фигуре 2, датчик 12, представленный на фигуре 1, может быть также установлен на одном конце упругого элемента, например пружины 26. Другой конец пружины 26 может быть прикреплен к стационарному опорному элементу 24. Как и в предыдущем случае, сфера 12 может перемещаться по трем ортогональным направлениям X, Y и Z, причем встроенные в сферу акселерометры вырабатывают сигналы, пропорциональные силе, действующей на сферу в случае возникновения градиента давления. Необходимо позаботиться о том, чтобы центр тяжести акселерометра размещался в центре сферы, так как в противном случае приложенная сила, которая действует по центру сферы, могла бы скручивать датчик, в результате чего будет возникать ускорение, которое не соответствует силе.
На фигуре 3 представлен отклик датчиков 10, 20 на типичную ударную волну, проходящую через датчики и создающую силу, которая пропорциональна градиенту давления в направлении распространения волны. Эта сила создает ускорение, которое обратно пропорционально массе датчика. На фигуре 3 приведены типичные графики изменения импульса ударной волны, проходящей через алюминиевую сферу диаметром 12 мм, которая подвешена в держателе 14 (см. фигуру 1). Параметры импульса типичны для ударной волны от пули, проходящей на расстоянии 30 м от датчика, с пиковым давлением порядка 100 Па и половинным временем Ts интервала примерно 150 мкс. Трехкоординатный акселерометр, использованный в эксперименте, был собран из трех элементов Endevco Model 25A ISOTRON и установлен внутри алюминиевой сферы диаметром 12 мм, имеющей толщину стенок 0,7 мм и общую массу 1,1 г. Ясно, что и другие легкие металлы или сплавы, а также пластмассы, например пенопласт с защитным водонепроницаемым поверхностным слоем, могут использоваться вместо алюминия или в дополнение к нему. Каждый элемент акселерометра имел массу 0,2 г, диаметр 5 мм, резонансную частоту 50 кГц и чувствительность 5 мВ/g. Максимальное действующее ускорение соответствовало 1 g, так что максимальное выходное напряжение составило 5 мВ. Как было указано выше, по меньшей мере в линейной области хода сферы 12 пиковые значения выходных сигналов каждого из трех элементов акселерометра пропорциональны единичным векторам направления распространения вдоль соответствующих осей.
Принципиальным достоинством датчика градиента давления является его сравнительно низкая чувствительность к низкочастотным силам и/или градиентам давления. На фигуре 4 представлен график зависимости от частоты силы, действующей на сферу диаметром 12 мм, на единицу звукового давления. Измеренная чувствительность имеет максимальное значение на частоте порядка 12 кГц и спадает с наклоном 6 дБ/октава на нижних частотах. То есть, характеристика датчика градиента давления соответствует частотной характеристике ударных волн, у которых большая часть энергии определяется составляющими на частотах, превышающих 6 кГц. Это упрощает схему обнаружения, поскольку могут быть исключены фильтры нижних частот. Для сравнения, большая часть энергии шумов, вызываемых, например, ветром и движением транспортного средства, определяется составляющими, частоты которых ниже 6 кГц, и поэтому шумы подавляются естественным образом.
На фигуре 5 представлен вид модели времен прихода ударной волны, описанной более подробно в патенте США №6178141, которая используется для оценки траектории снаряда и направления на точку выстрела (пуска) относительно точки нахождения датчика. Модель времен прихода построена на основе точной баллистической модели, учитывающей некоторые физические характеристики, относящиеся к полету снаряда, в том числе: плотность воздуха (зависит от температуры); декартовы координаты точки выстрела (пуска); углы азимута и возвышения дульного среза оружия; скорость снаряда на выходе из ствола (число Маха); скорость звука (зависит от температуры и плотности воздуха). Используя эту баллистическую модель, можно точно рассчитать для любой заданной точки в пространстве точное время, когда ударная волна (и дульная волна, если она используется) достигнет этой точки.
Измерения трех единичных векторов ударной волны и времени ее прихода к двум или более вышеупомянутым датчикам градиента давления достаточны для однозначного определения координат точки выстрела (пуска), траектории пущенного снаряда и его калибра. Точка Р выстрела имеет координаты (Рх, Ру, Pz) относительно центра (0, 0, 0) системы координат, датчик расположен в точке С с координатами (Сх, Су, Cz), и траектория снаряда показана исходящей из точки выстрела в направлении  . Длина вектора между точкой выстрела и j-м датчиком равна
. Длина вектора между точкой выстрела и j-м датчиком равна  , ближайшая точка траектории снаряда от j-го датчика находится на расстоянии
, ближайшая точка траектории снаряда от j-го датчика находится на расстоянии  , и расстояние, которое проходит излучаемая ударная волна от точки траектории до j-го датчика, равно
, и расстояние, которое проходит излучаемая ударная волна от точки траектории до j-го датчика, равно  . Угол волнового конуса снаряда (пули) равен θ=sin-1(1/М), М=V/c0. M - число Маха снаряда, V - его сверхзвуковая скорость, и с0 - скорость звука (зависит от давления и температуры). Угол "расхождения" между траекторией снаряда и направлением на j-й датчик равен γj. Траектория характеризуется ее азимутальным углом α, измеренным против часовой стрелки от оси Х в плоскости X-Y, и углом возвышения φ, измеренным вверх от плоскости X-Y. Уравнения, определяющие время tj прихода ударной волны и единичный вектор в точке j-го датчика, содержат указанные геометрические параметры.
. Угол волнового конуса снаряда (пули) равен θ=sin-1(1/М), М=V/c0. M - число Маха снаряда, V - его сверхзвуковая скорость, и с0 - скорость звука (зависит от давления и температуры). Угол "расхождения" между траекторией снаряда и направлением на j-й датчик равен γj. Траектория характеризуется ее азимутальным углом α, измеренным против часовой стрелки от оси Х в плоскости X-Y, и углом возвышения φ, измеренным вверх от плоскости X-Y. Уравнения, определяющие время tj прихода ударной волны и единичный вектор в точке j-го датчика, содержат указанные геометрические параметры.
Время прихода равно времени  которое необходимо снаряду для того, чтобы пройти расстояние
которое необходимо снаряду для того, чтобы пройти расстояние  до точки, из которой звук излучается в направлении j-го датчика, плюс время, в течение которого ударная волна проходит расстояние
до точки, из которой звук излучается в направлении j-го датчика, плюс время, в течение которого ударная волна проходит расстояние  от точки излучения до j-го датчика
от точки излучения до j-го датчика 

где t0 - время начала отсчета (момент выстрела).
Ближайшая точка траектории снаряда от j-ro датчика находится на расстоянии
Ближайшая точка траектории (или  ) может быть определена независимо по измеренному наклону ударной волны (см. фигуру 2) в соответствии со следующим уравнением:
) может быть определена независимо по измеренному наклону ударной волны (см. фигуру 2) в соответствии со следующим уравнением:
Mj - число Маха снаряда в точке, из которой звук излучается к j-му датчику вдоль траектории Aj снаряда, а ρ, с0 и β - атмосферное давление, скорость звука и параметр нелинейности (β=1,3). Наклон ударной волны определяется пиковым значением Ps ее давления, деленным на половину интервала Ts (см. фигуру 3).
Для целей измерения можно предположить, что скорость V снаряда остается постоянной на его траектории, если датчики расположены близко друг от друга, так что происходит лишь незначительное уменьшение скорости между моментами времени, в которые происходит излучение волны, принимаемой разными датчиками. Однако в более общем случае может быть использована математическая баллистическая модель, которая позволяет оценить время прихода ударной волны в любой точке пространства как функции полного набора параметров. Она выводится на основании физических законов, и ее точность составляет около 10 частей на миллион (ppm). Математическая модель подробно описывается в патенте США №6178141. Для сравнения, традиционные баллистические модели, получаемые эмпирически, имеют точность около 1 м для расстояний порядка 1 км, то есть 1000 ppm.
Баллистическая модель включает коэффициент Cb лобового сопротивления снаряда, который зависит от его калибра. Оценку калибра можно получить либо из пикового значения (Ps)j давления или из половины интервала Ts с использованием нижеприведенного уравнения, в котором учитываются параметры снаряды, такие как площадь поперечного сечения S, его длина L и константа K, которая зависит от формы снаряда.
После того определен калибр, можно найти коэффициент Cb лобового сопротивления снаряда. Этот параметр важен для баллистической модели оценки траектории снаряда. В контексте настоящего рассмотрения предполагается, что коэффициент лобового сопротивления пропорционален квадратному корню из числа Маха. Более точная модель описывается в патенте США №5930202. Расстояние  и время
и время  полета до точки, из которой излучается звук, принимаемый датчиком j, определяются по начальной скорости V0 на выходе из ствола, местной скорости V=Mc0 и коэффициенту Cb лобового сопротивления.
полета до точки, из которой излучается звук, принимаемый датчиком j, определяются по начальной скорости V0 на выходе из ствола, местной скорости V=Mc0 и коэффициенту Cb лобового сопротивления.
Для получения результатов на баллистической модели должна быть решена следующая система нелинейных уравнений:
|R1|=|D1|sin(γ1)
|R2|=|D2|sin(γ2)






Знаки равенства, содержащие три черточки, означают обязательное равенство правой части уравнения данным в левой части уравнения, полученным в результате измерений. Следующие равенства использовались для упрощения системы уравнений; эти уравнения не содержат данных:

Соответственно имеется 10 независимых нелинейных уравнений, из которых необходимыми являются только 8 (избыточность). Нормализованные выходные напряжения акселерометра по осям X, Y, Z для датчика j обозначены vxj, vyj, vzj, то есть индексы 1 и 2 обозначают два разных акселерометра или датчика градиента давления. Таким образом, нелинейные уравнения могут быть решены для неизвестных параметров. Необходимо отметить, что два неизвестных параметра (коэффициент лобового сопротивления и скорость на выходе из ствола) однозначно связаны с калибром снаряда, который можно определить из независимого уравнения, содержащего ближайшую точку траектории (или  и наклона давления ударной волны. Это обстоятельство позволяет ввести ограничения для ближайшей точки траектории при решении уравнений, в результате чего улучшается точность оценки параметров. Если используются дополнительные датчики, то избыточные данные, полученные в этом случае, могут использоваться при решении уравнений для дальнейшего улучшения точности оценки параметров.
и наклона давления ударной волны. Это обстоятельство позволяет ввести ограничения для ближайшей точки траектории при решении уравнений, в результате чего улучшается точность оценки параметров. Если используются дополнительные датчики, то избыточные данные, полученные в этом случае, могут использоваться при решении уравнений для дальнейшего улучшения точности оценки параметров.
Одним из возможных алгоритмов оценки траектории является вариант алгоритма Левенберга-Маркара нелинейной оптимизации на основе наименьших квадратов. Возможные вариации связаны с взвешиванием невязок. Использованный метод взвешивания дает решение LI-типа, то есть минимальное абсолютное значение. Веса на каждой итерации заново пересчитываются с использованием величины невязок для эффективного "отбрасывания" выбросов. LI-алгоритм Левенберга-Маркара, подробно описанный в патенте США №5930202, работает следующим образом:
1. Вычисляются невязки, веса и начальная стоимость, Е0.
2. Для k-й итерации вычисляются элементы матрицы Н взвешенных производных.
3. Выполняется вычисление следующей оценки x решением для δх и добавлением ее к текущей оценке x.
4. Вычисляются новые веса, взвешенные невязки и стоимость Ek в новом состоянии xk.
5. Если стоимость превышает предыдущую стоимость, эта оценка x(k) отбрасывается, λ увеличивается в несколько раз, например в 10 раз, и процедура повторяется, начиная с шага 3.
6. Если стоимость меньше предыдущей стоимости, и решение не сошлось, λ увеличивается в то же самое число раз, и процедура повторяется, начиная с шага 2.
Имеются три условия выхода из итерационного цикла: достижение схождения, достижение заданного максимального числа итераций (например, установка 50 итераций) или увеличение λ до заданного предела. Схождение определяется отношением новой стоимости к предыдущей стоимости x(k)/x(k-1). Если отношение находится между 0,9995 и 1, то либо достигнут локальный минимум, либо поверхность функции стоимости имеет плоскую область минимума, так что дальнейшие итерации результат не улучшат. Обычно устанавливается признак состояния, указывающий какое из этих двух состояний имеет место.
Было найдено, что глобальный минимум для направления на точку выстрела и для траектории снаряда может быть вычислен быстро и надежно с использованием эволюционного генетического алгоритма. Генетический алгоритм воспроизводит естественные эволюционные процессы и применяет их для выполнения исследований и оптимизации процессов. Во многих классических алгоритмах последовательного приближения используется детерминистская процедура приближения к оптимальному решению, которая начинается с решения, выбранного наугад, и затем задается направление поиска, основанное на заданном правиле переходов, например на прямых методах, в которых используется целевая функция и стоимости ограничений, и на градиентных способах, в которых используются производные первого и второго порядков. Однако эти способы имеют ряд недостатков, например, оптимальное решение зависит от выбранного начального решения, и большинство алгоритмов "застревают" на субоптимальном решении.
В отличие от классических способов поиска и оптимизации поиск в генетическом алгоритме начинается со случайного набора решений вместо использования всего лишь одного решения. После выбора случайной популяции решений каждое из таких решений оценивается как задача нелинейного программирования, и каждому решению присваивается коэффициент "приспособленности" (относительное достоинство). В одном варианте осуществления изобретения "приспособленность" может быть представлена эвклидовым кодовым расстоянием между вычисленным решением и решением, полученным в результате измерения. Например, одно из решений может быть определено по сигналам уровня ударной волны и разности времен прихода для двух или более датчиков j. Иначе говоря, целью является нахождение величины

и

где суммирование осуществляется по всем датчикам. В качестве альтернативного или дополнительного критерия может также использоваться минимальная невязка ближайшей точки траектории 

Интуитивно чувствуется, что лучше тот алгоритм, который обеспечивает меньшее значение ΔVmin, Δτmin и/или Δ|D|min.
В то время как изобретение раскрыто на примере подробно описанных предпочтительных вариантов его осуществления, для специалистов в данной области будут очевидными различные модификации и улучшения изобретения. Соответственно, сущность и объем настоящего изобретения ограничивается только его формулой.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СВЕРХЗВУКОВОГО СНАРЯДА | 2005 |
|
RU2358275C2 |
| СПОСОБ ОЦЕНКИ ДАЛЬНОСТИ ДО ТОЧКИ ВЫСТРЕЛА | 2008 |
|
RU2494336C2 |
| СПОСОБ КАЛИБРОВКИ ОТНОСИТЕЛЬНОГО ПОЛОЖЕНИЯ ДАТЧИКОВ В СИСТЕМЕ ОБНАРУЖЕНИЯ ВЫСТРЕЛА | 2005 |
|
RU2347234C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ПОЛЕТА СВЕРХЗВУКОВОГО СНАРЯДА | 2016 |
|
RU2670731C9 |
| БОРТОВАЯ СИСТЕМА И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКОВ | 2010 |
|
RU2512128C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ И СКОРОСТИ ОБЪЕКТА | 2009 |
|
RU2416103C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СТРЕЛКА НА МЕСТНОСТИ | 2005 |
|
RU2285272C1 |
| УСТРОЙСТВО ВНУТРИТРУБНОЙ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ТРУБОПРОВОДА | 2018 |
|
RU2697007C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ СРЕДСТВ ОГНЕВОГО ПОРАЖЕНИЯ ПО АКУСТИЧЕСКИМ КОЛЕБАНИЯМ НА ДАЛЬНОСТИ ОТ 500 М | 2023 |
|
RU2810603C1 |
| АКУСТИЧЕСКАЯ СИСТЕМА ПОВЫШЕНИЯ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434278C1 |
Изобретение относится к способам и системам для определения координат точки выстрела или пуска сверхзвукового объекта и направления его полета на основе информации только об ударной волне. Техническим результатом изобретения является обеспечение определения с помощью датчиков координат точки выстрела и траектории движения сверхзвукового снаряда на основании информации только ударной волны. Система для определения траектории сверхзвукового снаряда содержит по меньшей мере два разнесенных датчика, которые поддерживаются опорной конструкцией в известном положении и на которые действует ударная волна, создаваемая сверхзвуковым снарядом. Каждый датчик содержит: сферический корпус, упруго поддерживаемый опорной конструкцией с возможностью его перемещения по меньшей мере в двух направлениях; акселерометр, размещенный в сферическом корпусе и вырабатывающий сигнал в соответствии с приложенной к нему силой. Сила возникает в результате действия градиента давления ударной волны, и выходной сигнал содержит информацию о величине и направлении градиента давления и времени прихода ударной волны к датчику. Также каждый датчик содержит устройство обработки выходных сигналов и времен прихода по меньшей мере от двух датчиков для вычисления параметров, необходимых для определения траектории сверхзвукового снаряда. 13 з.п. ф-лы, 5 ил.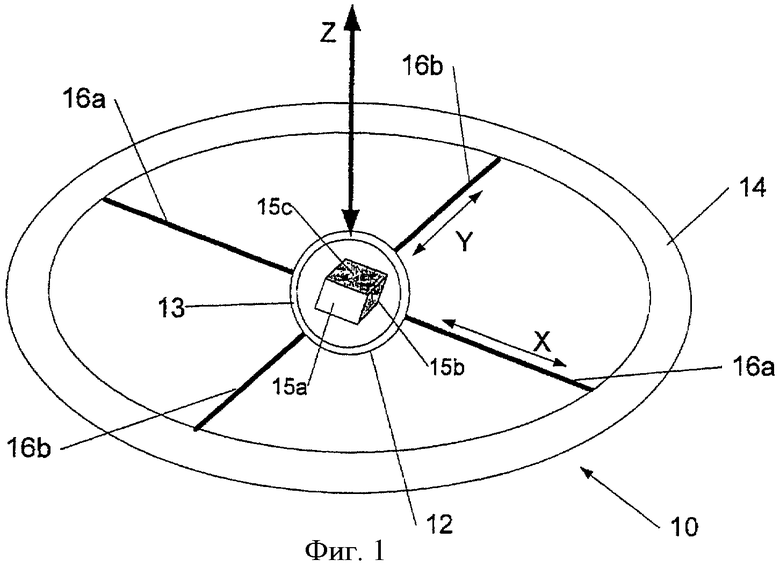
1. Система для определения траектории сверхзвукового снаряда, содержащая
по меньшей мере два разнесенных датчика, которые поддерживаются опорной конструкцией в известном положении и на которые действует ударная волна, создаваемая сверхзвуковым снарядом, причем каждый датчик содержит
сферический корпус, выполненный из легкого металла и упругоподдерживаемый опорной конструкцией с возможностью его перемещения по меньшей мере в двух направлениях;
акселерометр, размещенный в сферическом корпусе и вырабатывающий сигнал в соответствии с приложенной к нему силой, причем сила возникает в результате действия градиента давления ударной волны, и выходной сигнал содержит информацию о величине и направлении градиента давления и времени прихода ударной волны к датчику; и
устройство обработки выходных сигналов и времен прихода по меньшей мере от двух датчиков для вычисления параметров, необходимых для определения траектории сверхзвукового снаряда.
2. Система по п.1, в которой параметры выбираются из группы, состоящей из азимута точки выстрела, угла возвышения точки выстрела, азимута траектории, угла возвышения траектории, скорости на выходе из ствола и коэффициента лобового сопротивления снаряда.
3. Система по п.1, в которой акселерометр является трехкоординатным акселерометром, вырабатывающим выходные сигналы, соответствующие ускорению в трех взаимно независимых направлениях.
4. Система по п.1, в которой опорная конструкция содержит раму.
5. Система по п.4, в которой рама выполнена таким образом, чтобы она имела частоту колебаний, не превышающую 1 кГЦ.
6. Система по п.4, в которой корпус удерживается в раме с помощью нитей, проволок или лент.
7. Система по п.6, в которой корпус поддерживается опорной конструкцией таким образом, чтобы частота его собственных колебаний не превышала 1 кГц.
8. Система по п.6, в которой корпус поддерживается опорной конструкцией таким образом, чтобы частота его собственных колебаний не превышала 100 Гц.
9. Система по п.1, в которой опорная конструкция содержит упругий элемент.
10. Система по п.9, в которой упругий элемент содержит пружину.
11. Система по п.1, в которой, по меньшей мере, один датчик имеет максимальную чувствительность на частотах, превышающих 6 кГц.
12. Система по п.1, в которой, по меньшей мере, один датчик имеет максимальную чувствительность на частоте порядка 12 кГц.
13. Система по п.1, в которой устройство обработки дополнительно имеет средства для определения места дислокации точки выстрела (пуска) сверхзвукового снаряда.
14. Система по п.1, в которой, по меньшей мере, один датчик имеет резонансную частоту 50 кГц.
| СПОСОБ АКУСТИЧЕСКОГО ЗОНДИРОВАНИЯ ОКЕАНА | 2002 |
|
RU2221261C1 |
| US 5168475 A1, 01.12.1992 | |||
| Способ управления механическим прессом | 1974 |
|
SU503741A1 |
| US 5780745 A1, 14.07.1998 | |||
| US 5247488 A1, 21.09.1993. | |||

