Изобретение относится к быстроходным обратимым вращающимся электрическим машинам, в которых из-за компенсации центробежных ускорений ротора существенно увеличивается его угловая скорость и мощность всей электрической машины. Такие электрические машины могут выдавать трехфазный переменный ток в режиме генератора и работать на пульсирующем (выпрямленном) токе того же трехфазного переменного тока как электродвигатель. Это, а также то, что ротор электромашины (диаметром 0,5 м и более) способен разгоняться до высоких оборотов (30 тыс. об/мин и выше) без механических повреждений и выдавать повышенную частоту переменного тока (1 кГц и выше) может послужить основанием для создания сети новой энергосистемы антицентробежный генератор - трансформатор - антицентробежный двигатель.
Изобретение может быть использовано как электропривод для мощных высокопроизводительных центробежных насосов и вентиляторов, для перекачки жидкостей и газов, на транспорте, особенно водном, и в замкнутых энергосистемах.
Известно устройство, использующее способ с применением сдерживающей магнитной силы Северного и Южного (N-S) полюсов-магнитов ротора, - усовершенствованный двигатель постоянного тока (патент Германии DE 3807377, H02K 25/00), в котором сдерживание центробежной силы (тангенцальной составляющей) происходит за счет геометрического расположения магнитов-секторов ротора вдоль окружности его радиуса, которое позволяет этим секторам-магнитам притягиваться друг к другу южными и северными сторонами и частично компенсировать центробежную силу при вращении ротора. Этот способ частичной компенсации центробежной силы, действующей на каждый сектор ротора посредством притягивания N-S полюсов этих секторов, обусловлен использованием магнитной силы, направленной навстречу центробежной, приложенной к каждому сектору.
У этого известного устройства или у этого электродвигателя есть ряд недостатков.
Способ компенсации центробежной силы ротора электродвигателя постоянного тока в патенте Hanson Walter, H02K - 25/00, DE 3807377, 21.09.1989, «Verbesserter Gleichstrom-Motor», заключается в равноудаленном геометрическом расположении полюсов-магнитов ротора вокруг его оси вращения и притяжении их разноименных полюсов друг к другу, причем величина магнитного поля этих постоянных магнитов-полюсов незначительна и обусловлена пределом намагничивания материалов, что приводит к незначительной компенсации центробежной силы, действующей на полюса ротора. Это приводит к незначительному увеличению центробежнокомпенсированной окружной скорости и, как следствие, к незначительному увеличению удельной мощности электродвигателя (Вт/кг).
Конструкция ротора электродвигателя постоянного тока патента Hanson Walter, H02K - 25/00, DE 3807377, 21.09.1989, «Verbesserter Gleichstrom-Motor» позволяет лишь частично компенсировать центробежную силу, действующую на полюса ротора, встречной магнитной силой; т.е. магнитные силы сдерживания действуют не на все сечение ротора, а только на стыковые области N-S полюсов ротора.
Это устройство является наиболее близким по технической сущности и достигаемому эффекту
Задача изобретения - создание обратимой электрической машины, которая при работе в режиме генератора или электродвигателя сможет иметь (т.е. выдавать или преобразовывать), удельную мощность (Вт/кг) на прядок выше чем у современных асинхронных электродвигателей (генераторов). И как следствие, создание высокочастотной, компактной электрической системы на основе антицентробежного генератора - трансформатора - антицентробежного двигателя.
Поставленная задача достигается тем, что в предлагаемом способе компенсации центробежной силы ротора обратимой электрической машины путем сдерживания магнитного поля полюсов ротора сдерживающим магнитным полем, сдерживающее магнитное поле ротора обусловлено сонаправленным течением токов в проводниках ротора, расположенных диаметрально противоположно, причем величины этих токов пропорциональны окружной скорости ротора. Устройство для осуществления компенсации центробежной силы ротора обратимой электрической машины, содержит статор, ротор, подшипниковые и коллекторные узлы, при этом оно снабжено регулятором токов ротора блока электронного выпрямления, статор имеет три чередующиеся пары проводников, включенных параллельно и подключаемых к трехфазной сети, ротор имеет не менее двух проводников, обрамляющих магнитомягкий материал ротора, статор и ротор имеет количество проводников кратное двум, проложенных параллельно. Пазы с проводниками статора и ротора равномерно распределены по их поверхностям. В устройстве производится измерение окружной скорости ротора с передачей сигнала на регулятор токов ротора блока электронного выпрямления.
Как видно из вышеизложенного, предлагаемое изобретение обладает существенными признаками, отличными от прототипа, что позволяет сделать вывод о соответствии данного решения критерию «новизна».
Использование сонаправленно-параллельного пульсирующего
(выпрямленного) тока для создания магнитного поля ротора, использование устройства для измерения окружной скорости ротора с передачей сигнала на регулятор токов ротора блока электронного выпрямления позволяет сделать вывод о соответствии предлагаемого изобретения критерию «существенные отличия».
Далее сущность изобретения поясняется подробным описанием принципов, положенных в основу способа, и вариантов конструкции со ссылками на прилагаемые чертежи, где изображены:
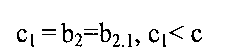
на фиг. 1 схема антицентробежного генератора в высокочастотной электрической системе;
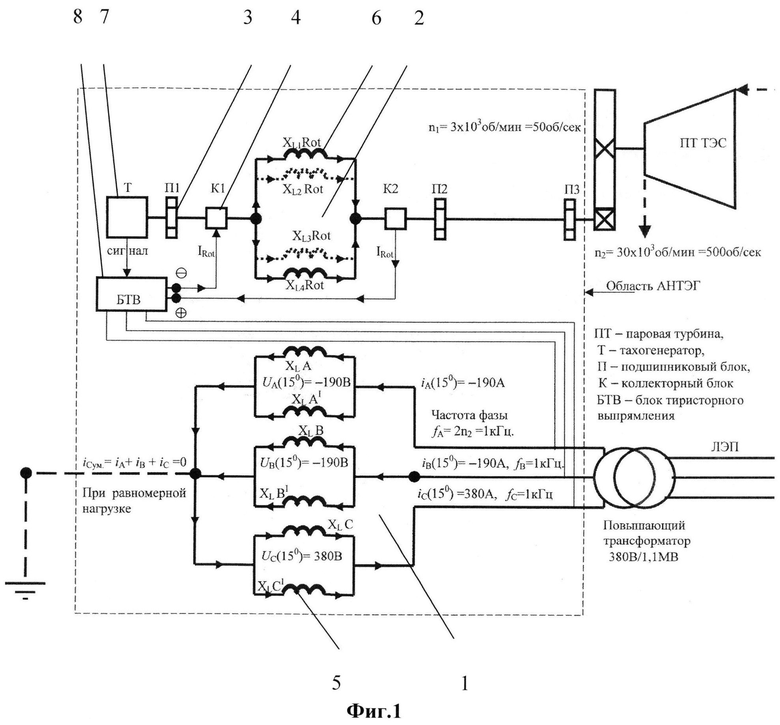
на фиг. 2 схема антицентробежного двигателя в высокочастотной электрической системе;
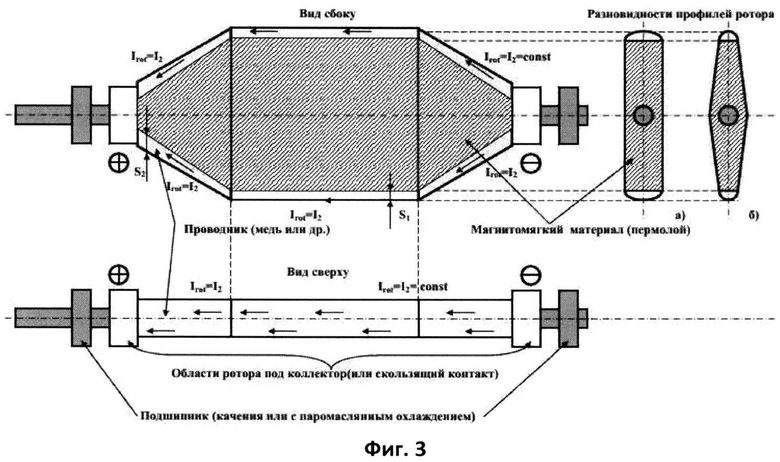
на фиг. 3 конструкция ротора антицентробежной электрической машины;
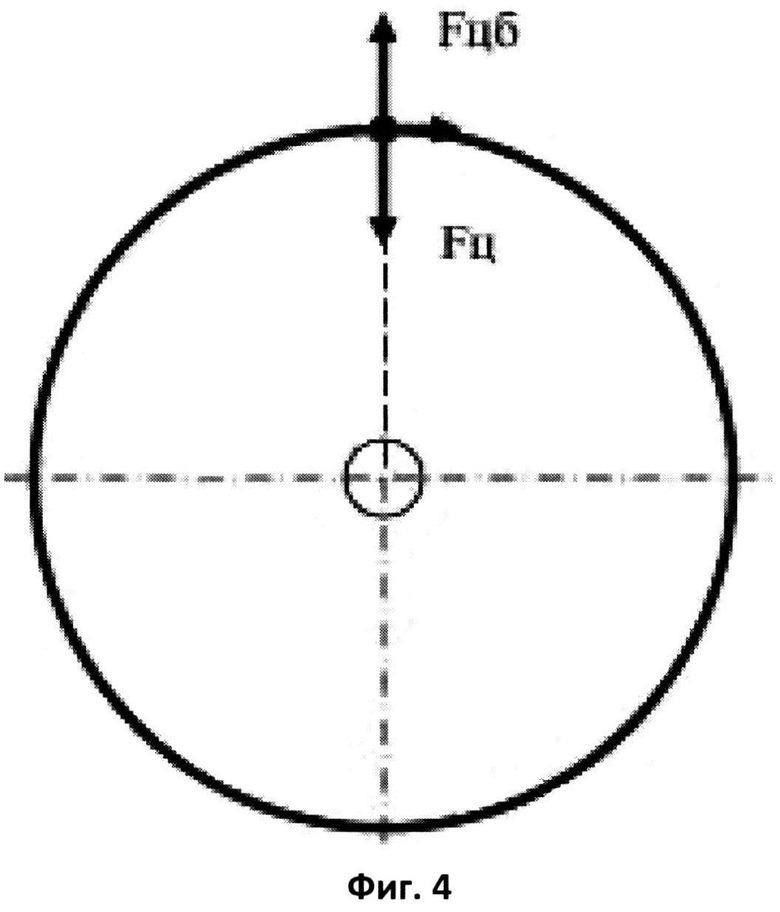
на фиг. 4 изображение сил, действующих на тело, которое двигается по окружности;
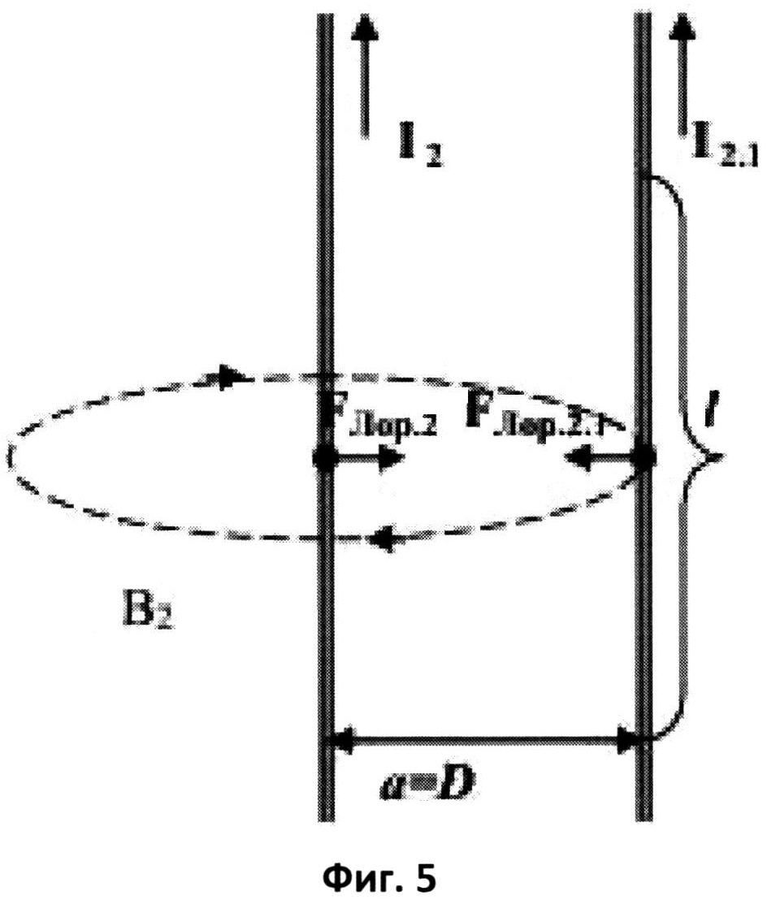
на фиг. 5 изображение сил, действующих на проводники с соноправленным течением токов;
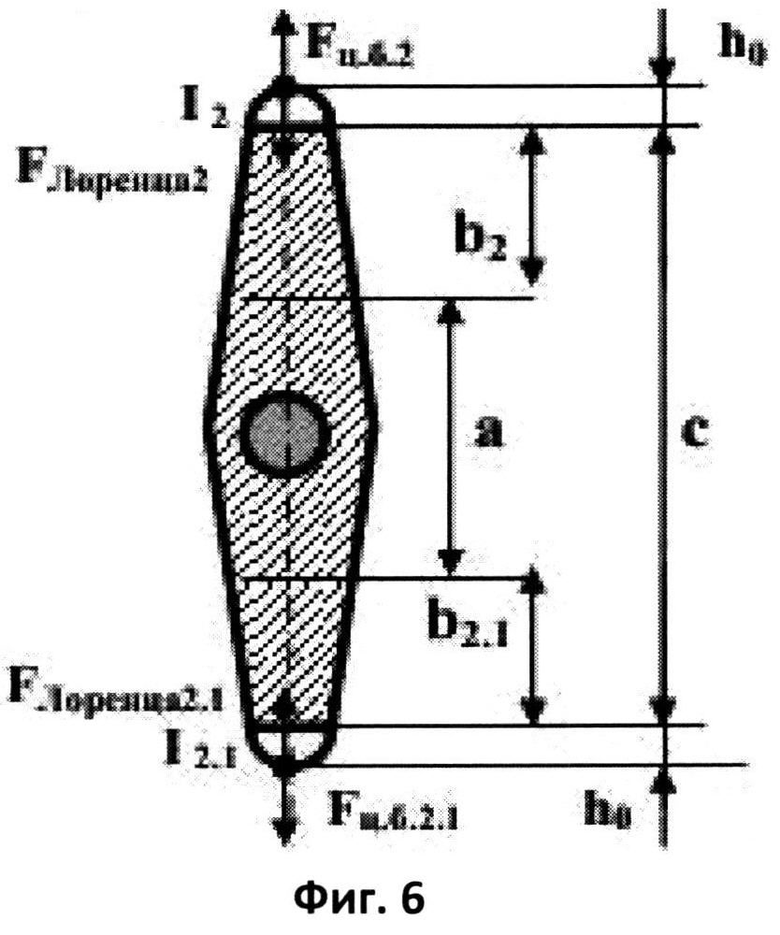
на фиг. 6 изображение сил, действующих на проводники ротора антицентробежной электрической машины, при одной паре проводников;
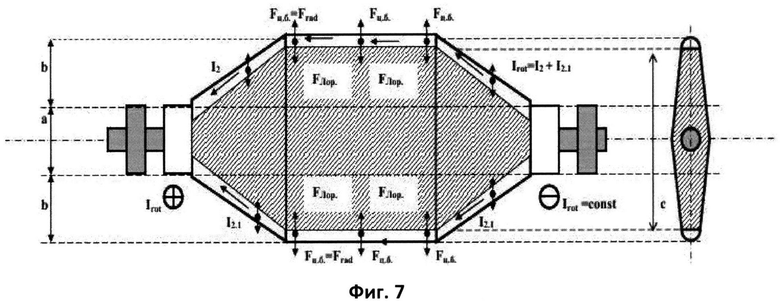
на фиг. 7 конструкция ротора антицентробежной электрической машины, с изображением действующих на него сил;
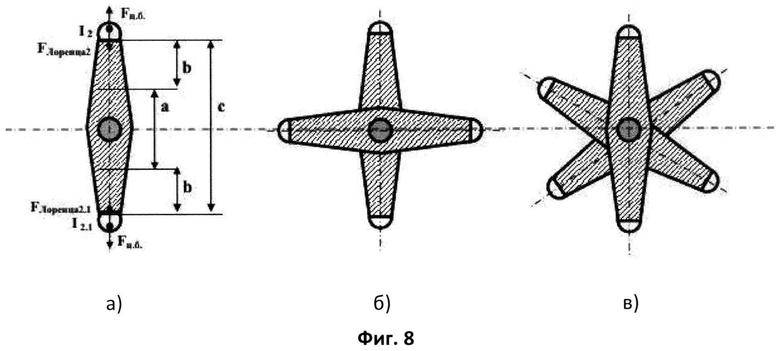
на фиг. 8 разновидности профилей ротора;
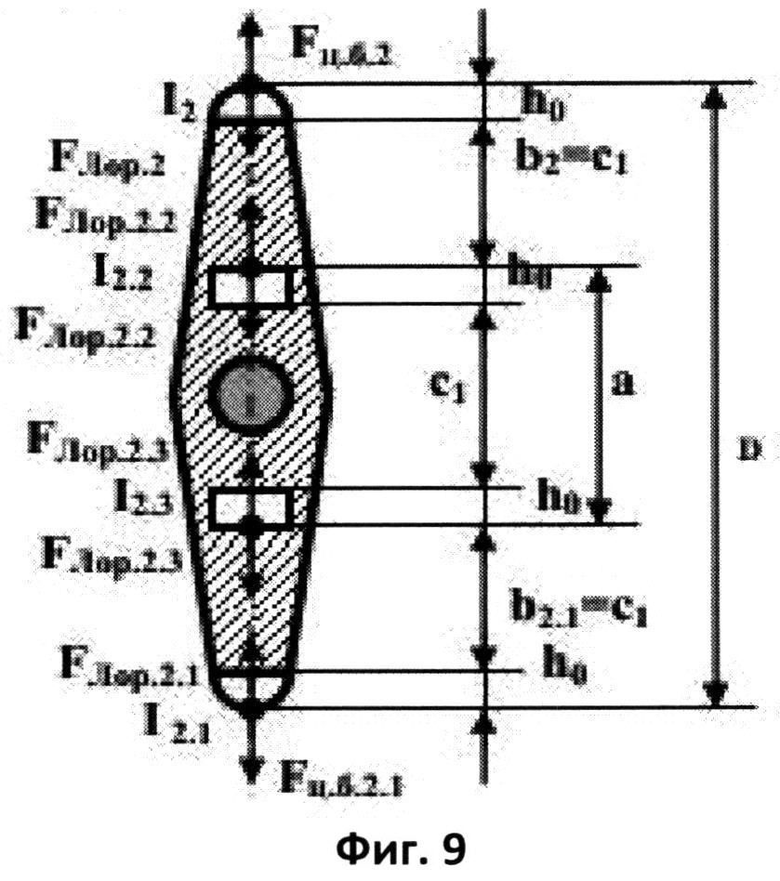
на фиг. 9 изображение сил, действующих на проводники ротора антицентробежной электрической машины, при двух парах проводников;
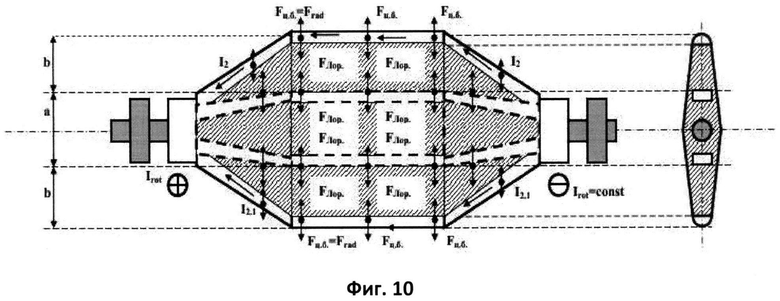
на фиг. 10 конструкция ротора антицентробежной электрической машины с дополнительными проводниками, с изображением действующих на него сил;
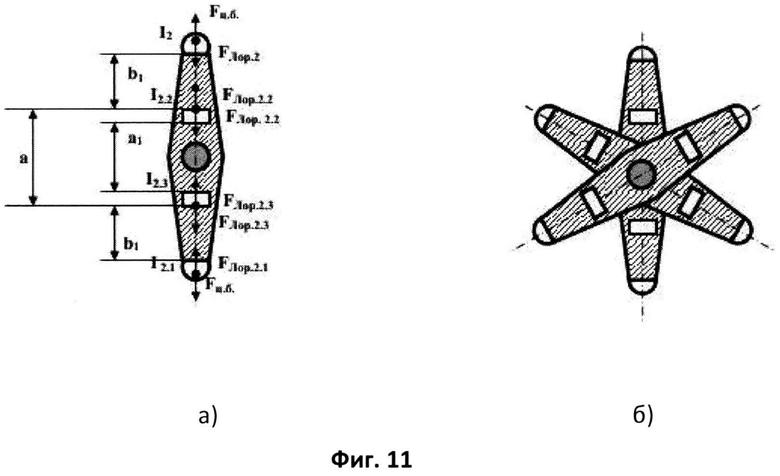
на фиг. 11 изображение сил, действующих на проводники ротора антицентробежной электрической машины, при двух парах проводников и конструкция ротора с шестью парами проводников;
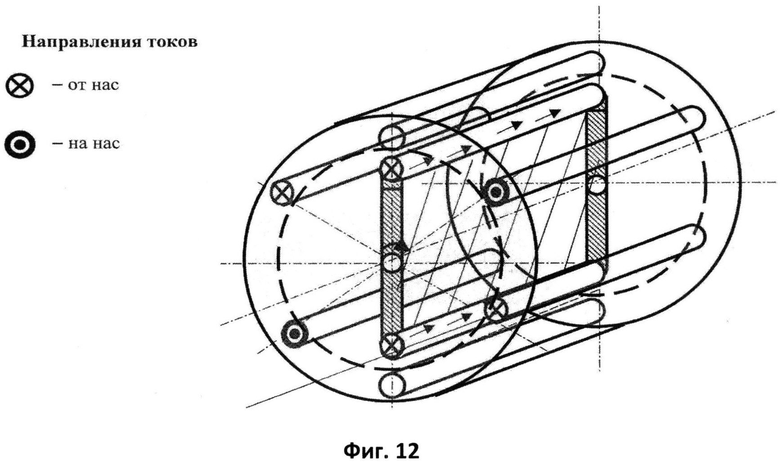
на фиг. 12 конструкция ротора вставленного в статор антицентробежной электрической машины (режим генератора);
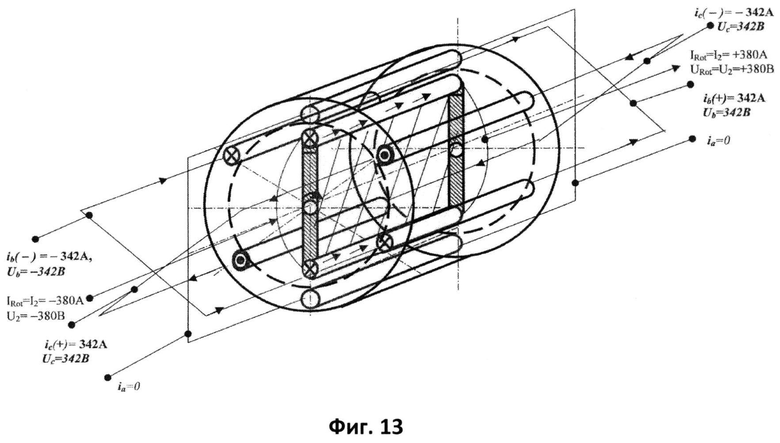
на фиг. 13 конструкция ротора и статора антицентробежной электрической машины с изображением электрической схемы статора (режим генератора);
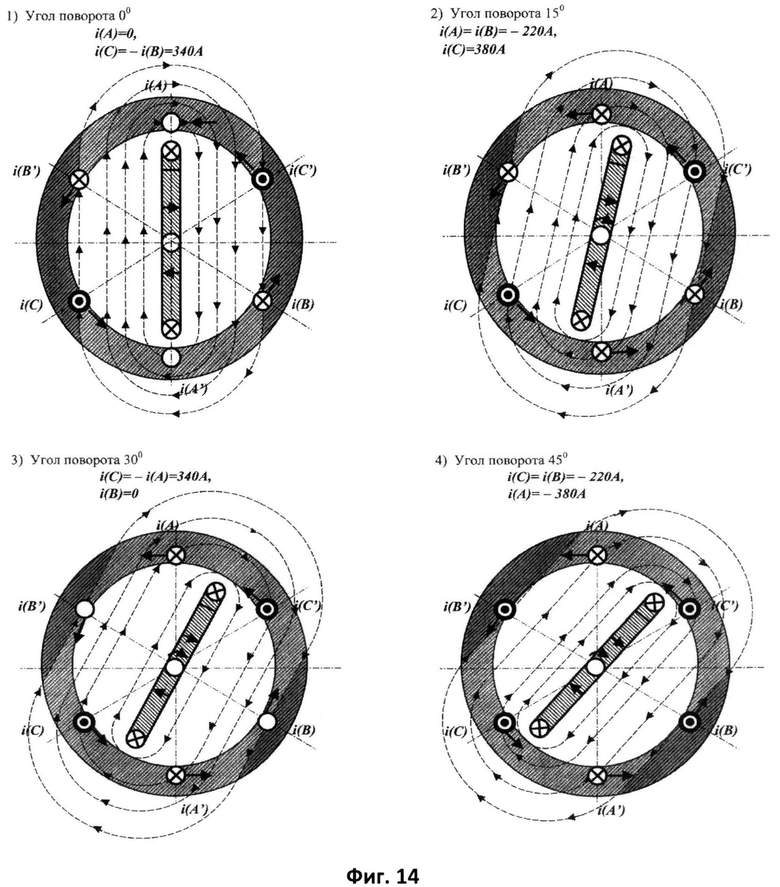
на фиг. 14 цикл работы антицентробежного генератора с 6-тью проводниками статора при углах поворота ротора 0-45°;
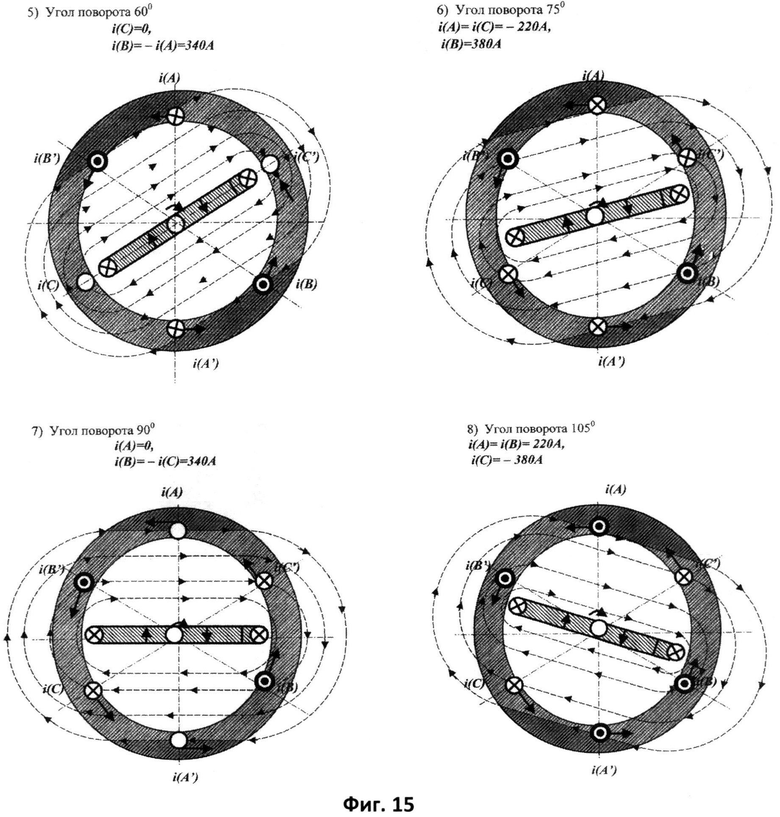
на фиг. 15 цикл работы антицентробежного генератора с 6-тью проводниками статора при углах поворота ротора 60-105°;
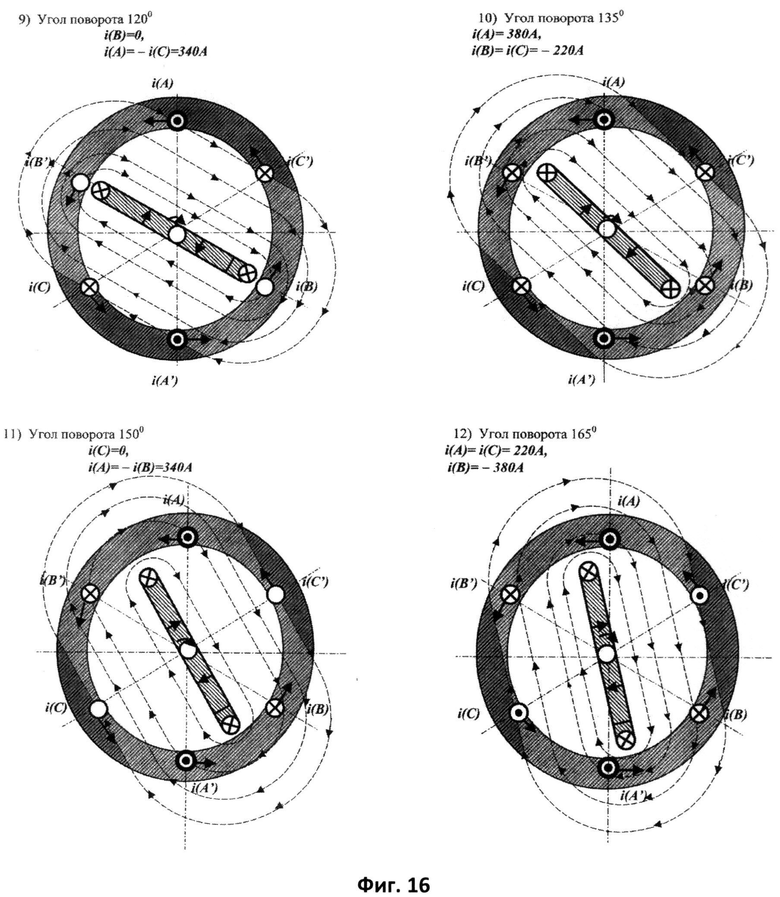
на фиг. 16 цикл работы антицентробежного генератора с 6-тью проводниками статора при углах поворота ротора 120-165°;
на фиг. 17 цикл работы антицентробежного генератора с 6-тью проводниками статора при углах поворота ротора 180-195°;
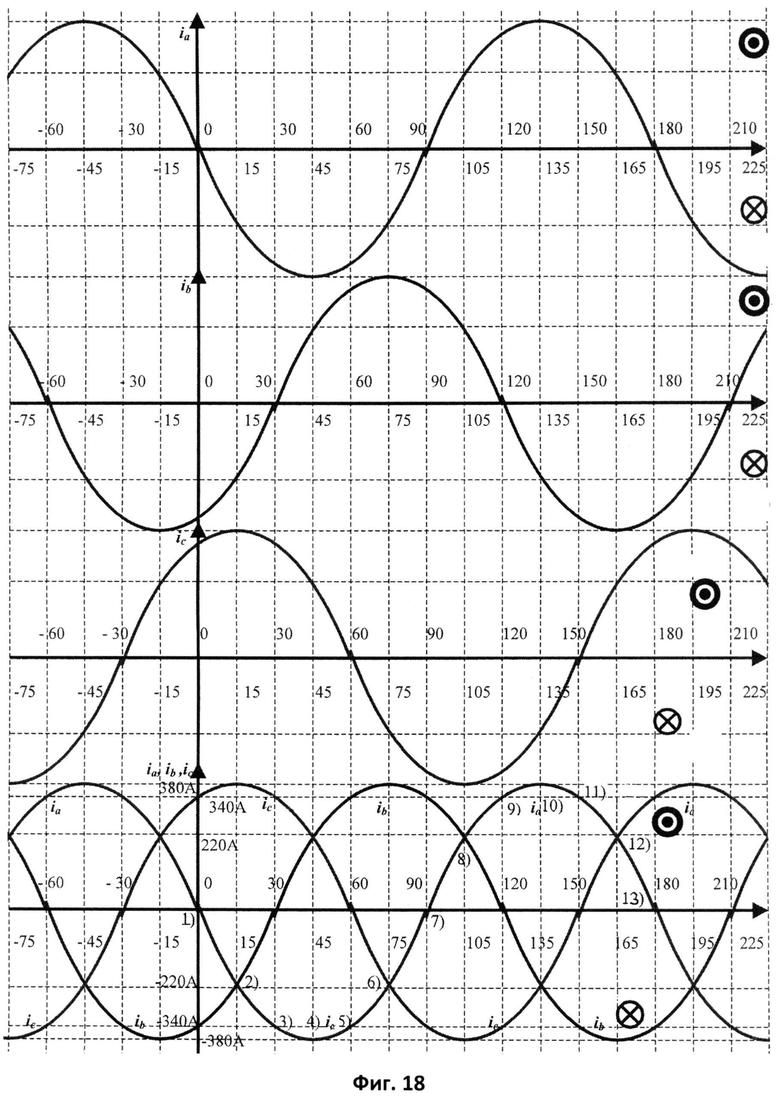
на фиг. 18 графики тока в фазах антицентробежного генератора с 3-мя парами проводников статора (при общем сопротивлении одной пары равным Хобщ=1 Ом);
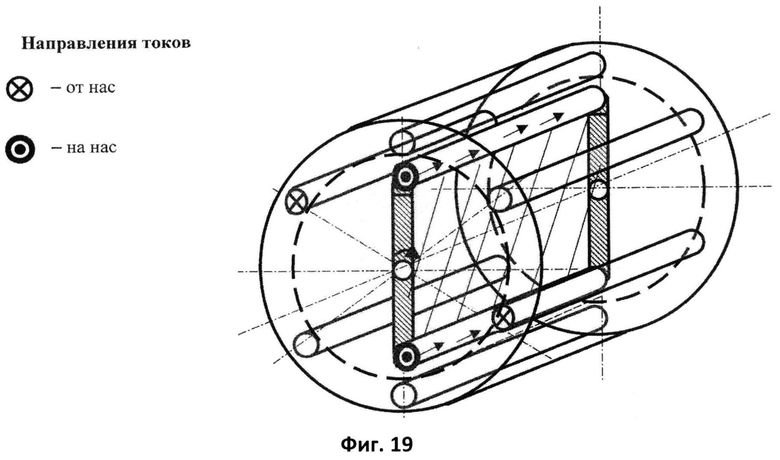
на фиг. 19 конструкция ротора, вставленного в статор антицентробежной электрической машины (режим электродвигателя);
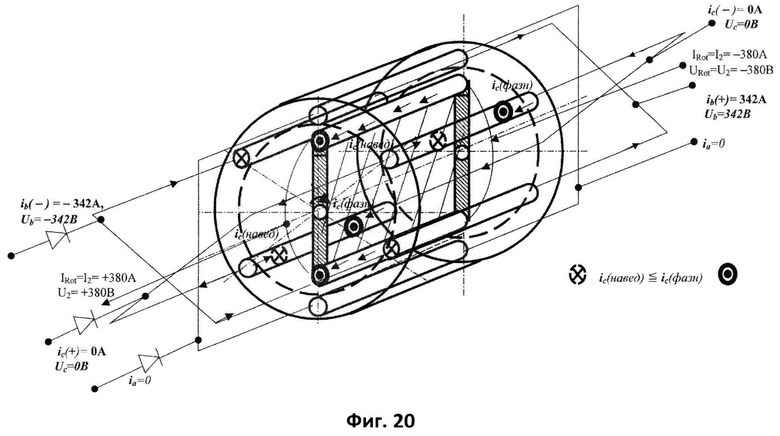
на фиг. 20 конструкция ротора и статора антицентробежного электрического двигателя с изображением ограниченного и наведенных токов в соседней (следующей) паре проводников статора;
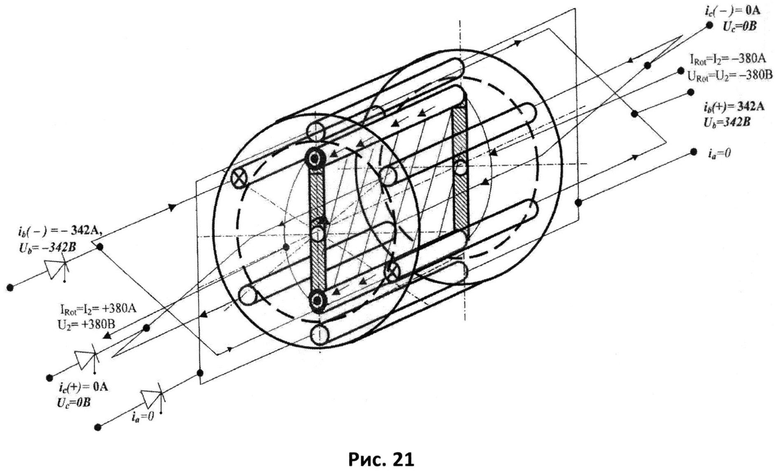
на фиг. 21 конструкция ротора и статора антицентробежного электрического двигателя в рабочем режиме с частичным изображением электрической схемы статора (блок электронного выпрямления не показан);
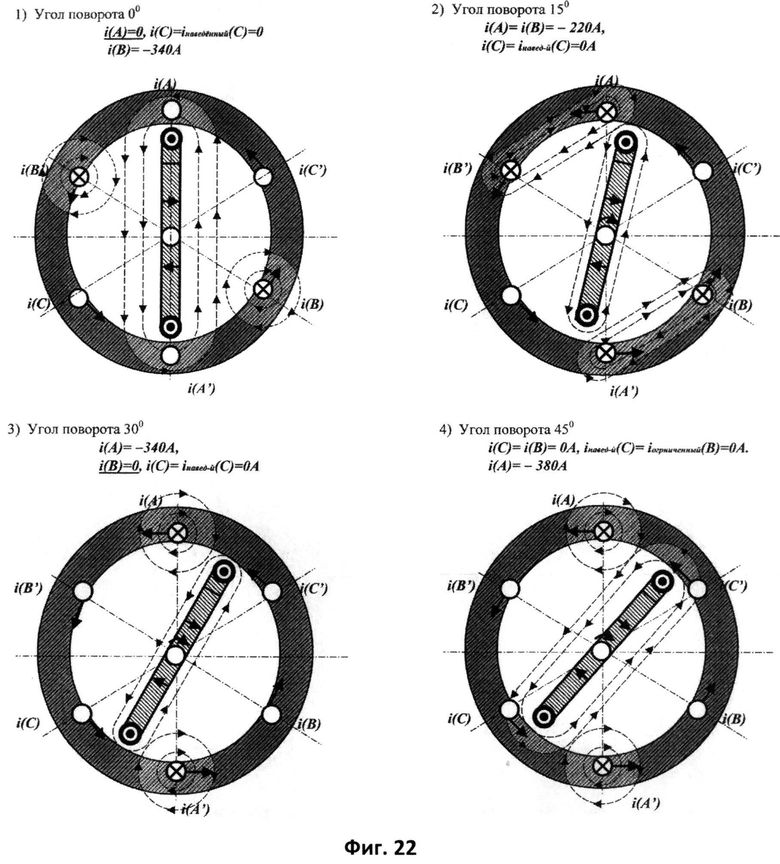
на фиг. 22 цикл работы антицентробежного электродвигателя пульсирующего тока с 6-тью проводниками статора при углах поворота ротора 0-45°;
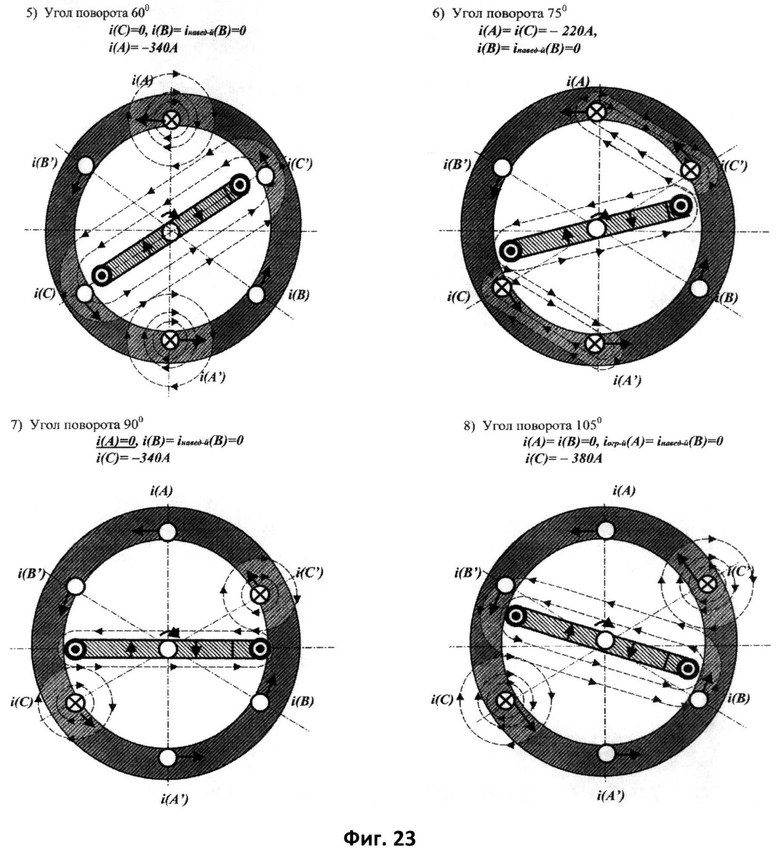
на фиг. 23 цикл работы антицентробежного электродвигателя пульсирующего тока с 6-тью проводниками статора при углах поворота ротора 60-105°;
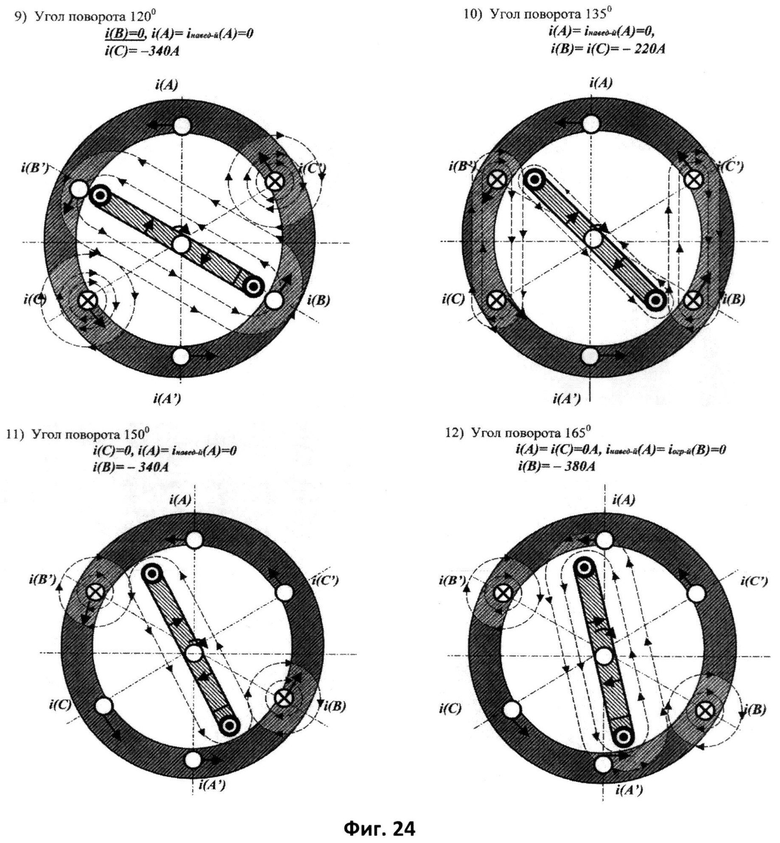
на фиг. 24 цикл работы антицентробежного электродвигателя пульсирующего тока с 6-тью проводниками статора при углах поворота ротора 120-165°;
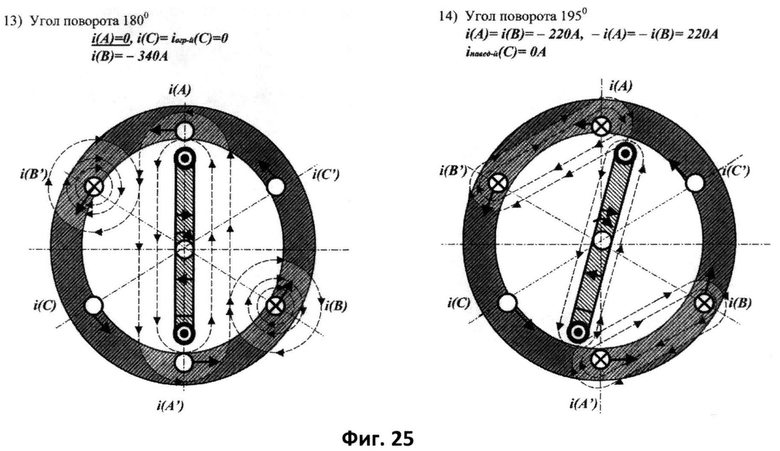
на фиг. 25 цикл работы антицентробежного генератора с 6-тью проводниками статора при углах поворота ротора 180-195°;
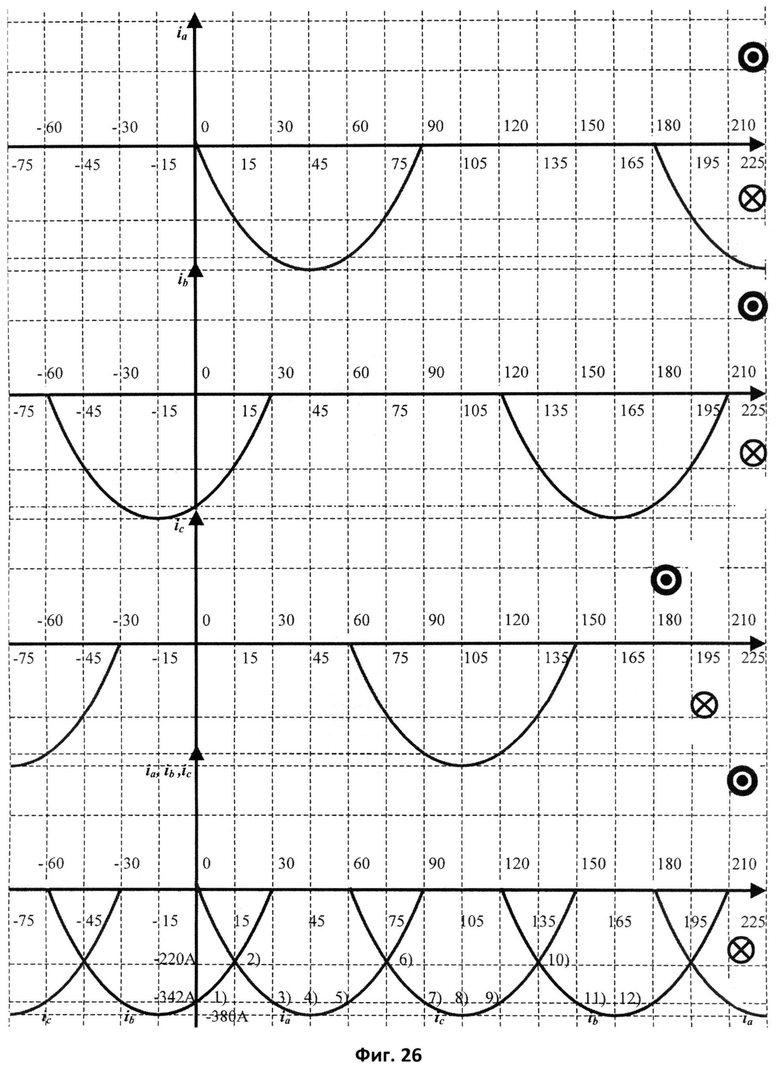
на фиг. 26 графики тока в фазах антицентробежного электродвигателя с 6-тью проводниками статора (с 3-мя парами), после преобразования в блоке электронного выпрямления;
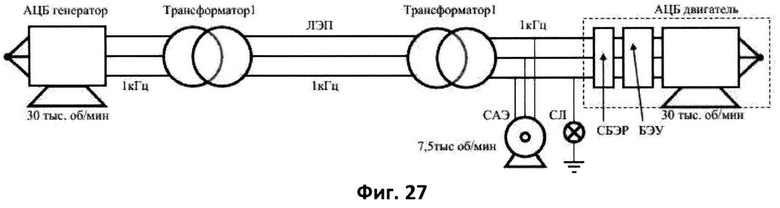
на фиг. 27 схема высокочастотной электрической системы на базе антицентробежных электромашин.
Антицентробежная электрическая машина содержит статор 1, ротор 2, подшипниковые 3 и коллекторные 4 узлы, обмотки статора 5 и ротора 6 (фиг. 1, 2). На валу ротора установлен тахогенератор 7 соединенный с блоком тиристорного выпрямления (регулятор токов ротора) 8.
Ротор 2 выполнен с сечением прямоугольным или с сужением на концах из магнитомягкого материала (в идеале с прямопропорциональной, малоплощадной петлей гистерезиса), концы которого обрамлены (медными) проводниками 6 (фиг. 3). На концах проводников ротора его обрамляющие медные проводники оканчиваются полыми медными цилиндрами для коллекторного контакта. Причем магнитомягкий сектор ротора 2 и проводники 6 ротора 2 должно быть электроизолированы друг от друга. Это достижимо, например, при применении изоляционных прокладок напылений (с высокими прочностными характеристиками на сжатие) или при проведении других мероприятий.
В идеале сечение проводников у сужающихся концов ротора должно быть равным сечению проводников в средней части ротора (фиг. 3):
Ротор (в сборе) насаживают на ось или шкиф, закрепляют шпонками и гайками оси (по бокам).
Сечение ротора имеет прямоугольный вид (первое сечение), или вид стрелки компаса (второе сечение) (фиг. 3). Второе сечение специально разработано для более удобного распределения линий магнитной индукции (для сдерживания проводников ротора).
Токи ротора I2.1, I2.2 должны быть постоянными и быть равными друг другу, они текут соноправлено или параллельно по обрамляющим проводникам (фиг. 3):
В рабочем режиме (при электрически включенном роторе) проводники ротора сдерживают центробежные усилия, которые влияют на сектор ротора при его вращении. Причем силы электромагнитного сдерживания (силы Лоренца) вызванные током проводников ротора сдавливают ротор пропорционально скорости вращения подобно тискам, при условии пропорционального изменения величины тока Irot.
Для подтверждения тезиса о электромагнитном сдерживании тела и проводников ротора приведем некоторые формулы.
Формула (3) определяет центробежную силу или тангенсальную составляющую, приложенную к точке вращающегося тела.
Центростремительная сила Fц заставляет тело двигаться по окружности и не позволяет телу двигаться по инерции по прямой (касательной к окружности). Сила инерции, противодействующая центростремительной называется центробежной силой и обозначается Fцб (фиг. 4). Обе силы равны по величине и противоположны по направлению.
Если Fцб - центробежная сила, сила инерции, действующая по радиусу от центра при движении по окружности, а ар - радиальное ускорение точки ротора, тогда формулы их определения:
Или, с учетом связи угловой скорости со (рад/с=с-1) с частотой вращения вала

ротора n (об/с=с-1) имеем:

Здесь:
υ - скорость тела (м/с),
ω - угловая скорость тела (рад/с=1/с),
m - масса тела (кг),
R - радиус окружности (ротора) (м),
n - число оборотов ротора (об/с).
ар - радиальное ускорение точки ротора (м/с2).
Формула для нахождения электромагнитной силы (Лоренца) взаимодействия двух параллельных проводников (статора) с соноправленными токами имеет вид:


Здесь µс=µµ0 - магнитная проницаемость среды, выражающая зависимость силы
взаимодействия электрических токов от среды,
µ0 - магнитная постоянная (4π×10-7Н/А2),
µ - относительная магнитная проницаемость (о.е.),
а - расстояние между поверхностями проводников (м),
D - диаметр ротора антицентробежной машины, с учетом толщины проводников (м),
I2 - ток проводника (части ротора) (А),
I2.1 - ток проводника (второй части ротора) (А),
FЛор.2 - сила (Н), действующая на левый проводник и обусловленная его током I2,
FЛор.2.1 - сила (Н), действующая на правый проводник и обусловленная его током I2.1,
l - отрезок длинного проводника (м), на который действует сила(ы) FЛор.2, FЛор.2.1.
В2 - магнитная индукция поля левого проводника(тока I2) (Тл).
Условие равновесия центробежной силы Fцб силой электромагнитного сдерживания (Лоренца) FЛор.2 в векторном виде (фиг.5):



Где К1 и К2 - постоянные коэффициенты пропорциональности.

Очевидно, что при численном равенстве коэффициентов K1 и К2 изменение тока(ов) сдерживания ротора I2=I2.1 обеспечит прямо пропорциональное изменение частоты вращения ротора n (об/с) (фиг. 4, 5). Т.е. равенства (11)-(14) математически доказывают, что возможно подобрать такие численные значения, при которых центробежные силы, действующие на ротор будут полностью компенсированы электромагнитными силами ротора, в довольно широком диапазоне.
Для более полной картины ротора антицентробежной машины приведем его конструкцию с двумя (фиг. 6, 7, 8а) проводниками.
Расчет сил, действующих на ротор при его вращении с установившейся скоростью вращения (об/сек), выглядит так.
Здесь I2 - ток, текущий по верхнему проводнику ротора;
I2.1 - ток, текущий по нижнему проводнику ротора;
Fц.б.2 - центробежная сила, действующая на верхний проводник ротора и на верхнюю часть центробежноопасной области ротора b2;
Fц.б.2.1 - центробежная сила, действующая на нижний проводник ротора и на нижнюю часть центробежноопасной области ротора b2.1
а - центробежнобезопасная область ротора ограниченная пределом твердости материала ротора, при проектируемой скорости ротора (об/сек).
FЛор.2 - электромагнитная сила сдерживания, действующая на верхний проводник ротора и обусловленная силой тока I2;
FЛор.2.1 - электромагнитная сила сдерживания, действующая на нижний проводник ротора и обусловленная силой тока I2.1
с=(D-2h0) - расстояние между двумя крайними проводниками ротора;
D - внешний диаметр ротора;
h0 - высота проводника ротора.
Надо сказать, что в случае конструкции ротора, показанной на фиг. 6, 7, 8, антицентробежный эффект сдерживания не максимален т.к. расстояние с (м) достаточно велико (до 0,5 м), а относительная магнитная проницаемость материала ротора (µ) и плотность тока в проводниках (А/мм2) - лимитированы.
Конструкция ротора антицентробежной машины с четырьмя проводниками показана на фиг. 9, 10, 11а.
В этом случае расчет сил, действующих на ротор при его вращении с установившейся скоростью вращения (об/сек) выглядит так (фиг. 9, 10, 11а).
Здесь I2 - ток, текущий по крайне-верхнему проводнику ротора;
I2.2 - ток, текущий по верхнему проводнику ротора;
I2.1 - ток, текущий по крайне-нижнему проводнику ротора;
I2.3 _ ток, текущий по нижнему проводнику ротора;
Fц.б.2 - центробежная сила, действующая на крайне-верхний проводник ротора и на верхнюю часть центробежноопасной области ротора b2;
Fц.б.2.1 - центробежная сила, действующая на крайне-нижний проводник ротора и на нижнюю часть центробежноопасной области ротора b2.1,
а - центробежнобезопасная область ротора ограниченная пределом твердости материала ротора, при проектируемой скорости ротора(об/сек).
FЛор.2 - электромагнитная сила сдерживания, действующая на крайне-верхний проводник ротора и обусловленная силой тока I2;
FЛор2.2 - электромагнитная сила сдерживания, действующая на верхний проводник ротора и обусловленная силой тока I2.2;
FЛор2.1 _ электромагнитная сила сдерживания, действующая на крайне-нижний проводник ротора и обусловленная силой тока I2.1
FЛор2.1 - электромагнитная сила сдерживания, действующая на нижний проводник ротора и обусловленная силой тока I2.3;
c1=(a-2h0) - расстояние между двумя ближайшими проводниками ротора;
а - центробежнобезопасная область ротора;
h0 - высота проводника ротора.
Надо сказать, что в случае конструкции ротора фиг. 9, 10, 11 антицентробежный эффект сдерживания существенно больше, чем в случае с двумя проводниками фиг. 7, 8а, т.к. расстояние c1<с (м) уменьшается (с 0,5 м до 0,15 м), а относительная магнитная проницаемость материала ротора (µ) и плотность тока в проводниках (А/мм2) - остаются такими же как и в первом случае.
Очевидно, что ротор с дополнительными (четырьмя) проводниками фиг. 9, 10, 11 более эффективен для сдерживания центробежной силы в центробежноопасной области ротора, хотя и более сложен с точки зрения технологического изготовления.
Статор антицентробежной электрической машины имеет классическую конструкцию (беличью клетку) и представляет собой три пары проводников (т.е. 6 штук), вделанных в статор из магнитомягкого материала, например из трансформаторного железа (фиг. 12).
Общее количество проводников может быть и больше 6×2=12 шт., 6×3=18 шт,…, в зависимости от диаметра статора и его внутреннего периметра. Причем количество проводников статора 6 штук - соответствует ротору с 2-мя проводниками; 12 штук - соответствует ротору с 4-мя проводниками (крест); 18 штук - соответствует ротору с 6-тью проводниками(снежинка) и т.д.
Схема подключения статора антицентробежной машины, работающей в режиме генератора представляет собой три чередующихся пары проводников, включенных параллельно. Концы этих проводников выведены наружу электрической машины и имеют возможность подключения к трехфазной сети (фиг. 13), другие же концы можно соединить вместе (в звезду). На фиг. 14-17 приведены циклы работы антицентробежного генератора, а фиг. 18 - графики тока в его фазах.
Антицентробежная машина, работающая в режиме электродвигателя, работает по принципу отталкивания проводников ротора от статора (фиг. 19-25), на выпрямленном пульсирующем напряжении (токе) фиг. 26, полученном посредством блока электронного выпрямления (БЭУ) (фиг. 2, 27). Причем стартовый режим разгона ротора антицентробежного электродвигателя выполняет «Стартовый блок электронного разгона» (СБЭР)(фиг. 27).
Блок электронного выпрямления отключает верхнюю полуволну переменного тока, разрывая цепь и приводит 3-х фазный переменный ток (напряжение) (фиг. 18) к выпрямленному пульсирующему току (фиг. 26). Тем самым он ограничивает не только фазные ток верхней полуволны (iCфазн) но и наведенные токи в соседних (следующих) проводниках статора (iс наведенный)» которые возникают из-за приближения проводников ротора. Т.е. преобразует фиг. 23 в фиг. 24. Блок электронного выпрямления также отвечает за выпрямление и пропорциональное изменение тока ротора от скорости его вращения.
О трехфазной сети антицентробежных машин (фиг. 1, 2, 27) надо сказать особо: теоретически она работает (подключается) также как и современная трехфазная электросеть с той только разницей, что частота такой сети больше традиционных 50 Гц, она может быть 500 Гц, 1 кГц, 10 кГц и т.д. Но тогда окружная скорость антицентробежной электромашины с одной парой проводников ротора и 3-мя парами проводников статора будет равна 50 Гц=1500 об/мин; 500 Гц=15000 об/мин 1 кГц=30000 об/мин, 10 кГц=300000 об/мин. Очевидно, что оптимум работы такой сети лежит в пределах 0,5-1 кГц.
К достоинствам новой трехфазной электрической системы можно отнести:
1. Повышенное индуктивное сопротивление, что сделает возможным применение проводников статора электромашин без удлинения, т.е. без дополнительных катушек и обмоток статора в традиционном понимании.
1.1 Применение новых материалов с номинально более высокой плотностью тока чем у меди.
2. Все трансформаторы и электродвигатели такой сети (1000 Гц и выше), а также другое электрическое оборудование будут более компактными и легкими при той же мощности.
3. При применении частоты 1 кГц, возможность подключения в такую электросеть обычных асинхронных двигателей с 8-мью парами полюсов, это снизит из скорость вращения до 7500 об/мин, что вполне применимо для современных электроприборов (фиг. 1, 2, 12).
4. Применима современная осветительная нагрузка т.е. светодиодные лампы.
Также о электроприводе, применяемом в высокочастотной электросети, можно сказать следующее.
1. Антицентробежный электродвигатель работает на механическую нагрузку с постоянным моментом (мощные насосы, вентиляторы и пр.).
2. Все остальные электродвигатели (асинхронные, двигатели постоянного тока) применимые в такой электросети могут работать на переменную, тяжелую и пульсирующую механическую нагрузку.
| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортное средство с гибридной силовой установкой | 2018 |
|
RU2701282C1 |
| СПОСОБ ЭЛЕКТРОПИТАНИЯ | 2015 |
|
RU2586895C1 |
| ЦЕНТРОБЕЖНЫЙ КРИОГЕННЫЙ КОМПРЕССОР | 1992 |
|
RU2034999C1 |
| ТИХОХОДНЫЙ ГЕНЕРАТОР СТАБИЛИЗИРОВАННЫХ ИМПУЛЬСОВ ПЕРЕМЕННОГО ТОКА СО СТАТОРОМ ИЗ ГЕНЕРИРУЮЩИХ МОДУЛЕЙ И РОТОРОМ С СИСТЕМОЙ УПРАВЛЕНИЯ НА ПОСТОЯННЫХ МАГНИТАХ | 2008 |
|
RU2394337C1 |
| ОБМОТКА СТАТОРА ТРЕХФАЗНЫХ ЭЛЕКТРИЧЕСКИХ МАШИН ПЕРЕМЕННОГО ТОКА | 2012 |
|
RU2508593C1 |
| СИНХРОННАЯ РЕАКТИВНАЯ МАШИНА | 2007 |
|
RU2346376C1 |
| СПОСОБ СЛАБОВИБРАЦИОННОГО СЛУЧАЙНОГО СМЕЩЕНИЯ ГРУЗОВ | 2013 |
|
RU2541579C2 |
| МОДУЛЬНОЕ ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО, ВЫПОЛНЕННОЕ С ВОЗМОЖНОСТЬЮ ОБРАТИМОЙ РАБОТЫ В КАЧЕСТВЕ ГЕНЕРАТОРА И ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2510559C2 |
| УСТРОЙСТВО СИНХРОННОГО ДВИГАТЕЛЯ-ГЕНЕРАТОРА | 2004 |
|
RU2253178C1 |
| ЭЛЕКТРОМАГНИТНОЕ УСТРОЙСТВО, ВЫПОЛНЕННОЕ С ВОЖМОЖНОСТЬЮ ОБРАТИМОЙ РАБОТЫ В КАЧЕСТВЕ ГЕНЕРАТОРА И ЭЛЕКТРОДВИГАТЕЛЯ | 2009 |
|
RU2516373C2 |

Изобретение относится к электротехнике, к быстроходным обратимым вращающимся электрическим машинам, в которых из-за компенсации центробежных ускорений ротора существенно увеличивается его угловая скорость и мощность всей электрической машины, и может быть использовано как электропривод для мощных высокопроизводительных центробежных насосов и вентиляторов, для перекачки жидкостей и газов, на транспорте, особенно водном, и в замкнутых энергосистемах. Способ компенсации центробежной силы ротора обратимой электрической машины заключается в сдерживании магнитного поля полюсов ротора сдерживающим магнитным полем, обусловленным сонаправленно-параллельным течением токов в проводниках ротора, расположенных диаметрально противоположно, величины которых пропорциональны окружной скорости ротора. Устройство для компенсации центробежной силы ротора содержит статор, ротор, подшипниковые и коллекторные узлы. Статор имеет три чередующиеся пары проводников, включенных параллельно и подключаемых к трехфазной сети. Ротор имеет не менее двух проводников (полюсов), обрамляющих магнитомягкий материал ротора. Статор и ротор имеют количество проводников кратное двум, проложенных параллельно. Пазы с проводниками статора и ротора равномерно распределены по их поверхностям. 2 н. и 2 з.п. ф-лы, 27 ил.
1. Способ компенсации центробежной силы ротора обратимой электрической машины, заключающийся в сдерживании магнитного поля полюсов ротора сдерживающим магнитным полем, отличающийся тем, что сдерживающее магнитное поле ротора обусловлено сонаправленным течением токов в проводниках ротора, расположенных диаметрально противоположно, причем величины этих токов пропорциональны окружной скорости ротора.
2. Устройство для осуществления компенсации центробежной силы ротора обратимой электрической машины, содержащее статор, ротор, подшипниковые и коллекторные узлы, отличающееся тем, что оно снабжено регулятором токов ротора блока электронного выпрямления, статор имеет три чередующиеся пары проводников, включенных параллельно и подключаемых к трехфазной сети, ротор имеет не менее двух проводников, обрамляющих магнитомягкий материал ротора, статор и ротор имеет количество проводников кратное двум, проложенных параллельно.
3. Устройство по п. 2, отличающееся тем, что пазы с проводниками статора и ротора равномерно распределены по их поверхностям.
4. Устройство по п. 2, отличающееся тем, что оно содержит устройство для измерения окружной скорости ротора с передачей сигнала на регулятор токов ротора блока электронного выпрямления.
| DE 3807377 A1 21.09.1989 | |||
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ РОТОРОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 1994 |
|
RU2111466C1 |
| ЗУБЧАТЫЙ ЭЛЕКТРОМАГНИТНЫЙ РОТОР | 1997 |
|
RU2145459C1 |
| РОТОР СИНХРОННОЙ НЕЯВНОПОЛЮСНОЙ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2005 |
|
RU2295820C1 |
| Способ определения краевых углов смачивания волокон жидкостями на границе с воздухом | 2024 |
|
RU2834579C1 |

