Изобретение относится к области компрессоров объемного действия и может быть использовано для повышения их экономичности и быстроходности.
Известен способ работы компрессора объемного действия, заключающийся в циклическом попеременном уменьшении и увеличении объема рабочей камеры за счет движения в ней рабочего органа (см., например, кн.: Б.С. Фотин, И.Б. Пирумов, И.К. Прилуцкий, П.И. Пластинин. Поршневые компрессоры. - Л.: Машиностроение, 1987. - 372 с., стр.5, рис.B.1).
Известен также способ работы компрессора объемного действия, заключающийся в циклическом попеременном уменьшении и увеличении объема рабочей камеры за счет движения в ней рабочего органа, причем при увеличении объема рабочая камера соединяется с источником, а при уменьшении - с потребителем рабочей газообразной среды с помощью самодействующих всасывающих и нагнетательных клапанов, имеющих подвижные запорные элементы (см., например, кН.: П.И. Пластинин. Поршневые компрессоры. М.: Колос, 2000. - 456 с., стр.12-13, рис.1.2 и 1.3).
Недостатком известных способов являются значительные потери механической работы, подведенной к рабочему органу, в процессах нагнетания и всасывания, что связано с неизбежным запаздыванием открытия и закрытия самодействующих клапанов из-за сил инерции, действующих на подвижные запорные элементы, и вынужденно большой силы пружин. Даже в сравнительно тихоходных компрессорах объемного действия потери работы в процессах нагнетания и всасывания могут достигать 10 и более процентов, а в быстроходных компрессорах - до 30%.
Задачей изобретения является снижение потерь механической работы (увеличение КПД) и повышение быстроходности компрессоров объемного действия.
Указанная задача решается тем, что в течение произвольно выбранного цикла производят измерение отрезка времени от момента прохождения рабочим органом выбранной контрольной точки до момента начала открытия и(или) закрытия клапана tOP, после чего в течение произвольно выбранного числа рабочих циклов производят принудительное открытие и(или) закрытие клапана через промежуток времени t0t от момента прохождения рабочим органом выбранной контрольной точки, определяемый формулой
t0t=tOP-tIN-tEL,
где tOP - промежуток времени от момента прохода рабочего органа контрольной точки до момента начала открытия и(или) закрытия клапана под действием перепада давления на запорном элементе, измеряется в произвольно взятом цикле; tEL - время срабатывания механизма принудительного открытия и(или) закрытия клапана; tIN - время запаздывания открытия и(или) закрытия клапана, определяемое силами инерции, действующими на запорный элемент.
Реализация предложенного способа работы компрессора объемного действия показана ниже на примере одноступенчатого поршневого компрессора с тронковым поршнем и поясняется чертежами.
На фиг.1 схематично показана ступень поршневого компрессора при произвольном положении поршня и шатуна (штриховыми линиями показано положение поршня и шатуна в нижней мертвой точке - НМТ), а на фиг.2 - структура управления самодействующими клапанами.
Компрессор состоит из цилиндра 1, в котором размещен рабочий орган - поршень 2, приводимый в возвратно-поступательное движение шатуном 3, установленном на кривошипе 4, который является частью приводного вала 5. Поршень 2 и цилиндр 1 образуют рабочую камеру 6, которая при возвратно-поступательном движении поршня 2 циклически попеременно увеличивается и уменьшается в объеме. В верхней части цилиндра 1 имеется клапанная коробка 7 с полостями всасывания 8 (соединена с источником рабочей газообразной среды) и нагнетания 9 (соединена с потребителем рабочей газообразной среды). В полости всасывания 8 установлен самодействующий всасывающий клапан, состоящий из подпружиненного пружиной 10 стального подвижного запорного элемента 11 и седла 12. В полости нагнетания 9 установлен самодействующий нагнетательный клапан, состоящий из подпружиненного пружиной 13 стального подвижного запорного элемента 14 и седла 15. В обеих полостях (8 и 9) установлены электромагниты соответственно с обмотками 16, 17 и 18, 19, надетыми на стальные сердечники, с возможностью воздействия этих электромагнитов на запорные элементы 11 и 14. На нижней головке шатуна 3 закреплен постоянный магнит 20, а по оси цилиндра 2 в его нижней части установлен датчик положения 21 (например, индукционного типа).
Структура управления (фиг.2) движением запорных элементов 11 и 14 состоит из счетчика количества оборотов 22, прерывателя 23, преобразователя сигнала 24, таймера 25, коммутатора 26, сравнивающего устройства 27, оперативного запоминающего устройства 28 с входами А, Б, В, Г, счетчика 29, прерывателя 30, вычислителя 31 и ключа 32.
Способ работы машины объемного действия реализуется следующим образом.
В общем случае (фиг.1) при вращении приводного вала 5 кривошип 4 и шатун 3 преобразуют это вращательное движение в возвратно-поступательное движение поршня 2, в результате чего происходит попеременное изменение (уменьшение и увеличение) объема рабочей камеры 6. При увеличении ее объема происходит всасывание газа через всасывающий самодействующий клапан (поз.10-12), а при уменьшении объема - сжатие газа с последующим его нагнетанием через самодействующий нагнетательный клапан (поз.13-15).
При пуске компрессора приводной вал 5 начинает движение из любого положения, а в счетчик количества оборотов 22 (фиг.2) записывается ноль, который передается прерывателю 23, разрывающему связь преобразователя сигнала 24 с дальнейшей схемой управления, и всасывающий и нагнетательный клапаны работают в режиме самодействующих. После первого срабатывания датчика 21 в счетчике 22 записывается единица, которая передается прерывателю 23, и он подключает преобразователь сигнала 24 к таймеру 25 и одновременно подает сигнал на коммутатор 26, который подает на катушки 16 и 18 контрольное измерительное (небольшое) переменное напряжение. При этом в катушках 17 и 19 индуцируется некоторое опорное напряжение, соответствующее зазору между поверхностями запорных элементов 11 и 14 и сердечниками обмоток 16, 17 и 18, 19. Эти напряжения подаются на сравнивающее устройство 27.
Приводной вал 5 вращаясь, перемещает поршень 2 в направлении от НМТ (в ней сработал датчик 21) к верхней мертвой точке (ВМТ), сжимая газ до тех пор, пока давление в рабочей камере 6 не достигнет давления в полости нагнетания 9, после чего с некоторым запозданием запорный элемент 14 нагнетательного клапана начинает движение вверх, отрываясь от седла 15. При этом в самом начале движения зазор между поверхностью запорного элемента 14 и сердечниками обмоток 18 и 19 уменьшается, что вызывает увеличение коэффициента трансформации между обмотками 18 и 19, и напряжение в обмотке 19 начинает увеличиваться, что фиксируется в сравнивающем устройстве 27, которое выдает сигнал на таймер 25, в котором определяется тем самым время tOP, прошедшее от момента прохождения контрольной точки (НМТ) до открытия нагнетательного клапана, работающего в самодействующем режиме. Эта величина подается на вход А оперативного запоминающего устройства (ОЗУ) 28 и хранится в нем отдельно для каждого действия (открытие - закрытие) каждого клапана.
Аналогичная процедура производится при закрытии нагнетательного клапана (соответствующее время tOP подается на вход Б ОЗУ), открытия и закрытия всасывающего клапана (сигнал подается на входы В и Г). Одновременно сигналы с таймера 25 направляются на счетчик 29, при переполнении которого (количество сигналов больше четырех) он посылает сигнал на отключение прерывателя 23 и включение прерывателя 30, соединяющего преобразователь сигнала 24 с вычислителем 31 через ключ 32. В постоянном запоминающем устройстве (ПЗУ) вычислителя 31 хранятся данные о запаздывании движения запорных элементов 11 и 14 (tIN и tEL).
При следующем срабатывании датчика 21 (второй полный рабочий цикл работы компрессора) сигнал с датчика 21 через преобразователь 24, прерыватель 30 попадает на ключ 32, который последовательно соединяет выходы ОЗУ 28 с вычислителем 31. Вычислитель 31 формирует выходные управляющие сигналы для каждого действия каждого клапана и своевременно подает их на коммутатор 26, который также своевременно включает и выключает питание постоянным током обмоток 16, 17 и 18, 19, соединяя каждую пару обмоток последовательно для обеспечения ее работы в качестве обычного электромагнита.
При этом в конце процесса сжатия (поршень 2 движется вверх) запорный элемент 14 притягивается своим электромагнитом (обмотки 18, 19 при этом подключаются параллельно) вверх, своевременно открывая седло 15 для прохода сжатого газа в процессе нагнетания, после чего, в конце процесса нагнетания электромагнит своевременно отключается, и запорный элемент 14 своевременно перекрывает седло 15, двигаясь под действием пружины 13. В начале процесса всасывания (поршень 2 движется вниз) запорный элемент 11 своевременно отжимается своим электромагнитом (параллельно подключенные обмотки 16 и 17) вниз, открывая седло 12 для осуществления процесса всасывания, а в конце этого процесса электромагнит своевременно отключается, давая возможность запорному элементу 11 своевременно перекрыть седло 12.
По прошествии наперед заданного числа циклов с управляемым движением клапанов (например, числа 100) происходит переполнение счетчика 22, который посылает сигнал на отключение прерывателя 30, обнуляет свое значение, что приводит процесс управления в первоначальное состояние. Снова в течение одного полного цикла производится определение моментов открытия и закрытия клапанов, работающих в самодействующем режиме, после чего снова компрессор отрабатывает заданное число циклов с принудительным оптимальным управлением работой клапанов. Это необходимо для того, чтобы постоянно учитывать изменение давления нагнетания (соответственно - время прохождения поршня 3 от НМТ до положения, в котором в рабочей полости 6 создалось давление нагнетания - давление потребителя), что характерно для всех компрессорных машин, работающих на потребителя с переменным расходом, а это подавляющее большинство реальных потребителей сжатого газа.
Время запаздывания открытия и закрытия запорных элементов 11 и 14 клапанов tIN, зависящее от сил инерции, определяется экспериментально или путем интегрирования известного уравнения динамики запорного элемента самодействующего клапана:
где mz0 - масса запорного органа, mPR - масса пружины, h - высота подъема запорного элемента, τ - текущее время
∑F=FP+FPR+FTR+G,
где G - вес приведенной массы запорного элемента - G=mZ·g, где g - ускорение свободного падения, сила упругости пружины FPR:
FPR=CPR(h+h0),
где CPR - жесткость пружины, h0 предварительный натяг пружины при положении запорного органа на седле (h=0), сила FP от действия перепада давления на запорном элементе
FP=fZ·Δp·ρP,
где fZ - поверхность запорного органа перпендикулярная потоку газа, Δp - перепад давления, действующий на запорный орган, ρP - коэффициент давления потока, который определяется опытным путем, сила трения FTP:

где kD - коэффициент демпфирования, определяется экспериментально.
Время срабатывания tEL механизма принудительного открытия электромагнитного привода запорных элементов 11 и 14 (время «страгивания») может быть определено по формуле:
где ly=(U/R), U - напряжение, подаваемое на обмотку электромагнита, R - активное сопротивление этой обмотки, L - индуктивность обмотки, iTP - ток «страгивания», определяется экспериментально.
Время срабатывания tEL механизма принудительного закрытия электромагнитного привода запорных элементов 11 и 14 (время «отпускания») зависит от силы пружины (поз.10 и 13) и явлений статочного магнетизма, определяется экспериментально.
Описанный способ работы компрессора объемного действия позволяет организовать своевременное, близкое и идеальному, открытие и закрытие клапанов, увеличить их эффективное проходное сечение, практически избавиться от колебаний запорных элементов, что дает возможность снизить потери механической работы цикла в процессах всасывания и нагнетания (повысить КПД), а также увеличить быстроходность машины, что влечет за собой снижение ее материалоемкости и, соответственно, стоимости. Все это вместе взятое позволяет снизить удельные затраты на производство сжатого газа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПРЕССОР С БЕСКОНТАКТНЫМ УПЛОТНЕНИЕМ ДЛЯ СЖАТИЯ ЧИСТЫХ ГАЗОВ | 1995 |
|
RU2098663C1 |
| СПОСОБ РАБОТЫ ПОРШНЕВОГО КОМПРЕССОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2023 |
|
RU2818615C1 |
| ПОРШНЕВАЯ МАШИНА С ИНДИВИДУАЛЬНОЙ СИСТЕМОЙ ОХЛАЖДЕНИЯ ЦИЛИНДРА | 2015 |
|
RU2594389C1 |
| СИСТЕМА ВПРЫСКА ТОПЛИВА | 2005 |
|
RU2295057C1 |
| СПОСОБ ЗАПУСКА КОМПРЕССОРА С ГАЗОСТАТИЧЕСКИМ ЦЕНТРИРОВАНИЕМ ПОРШНЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2120063C1 |
| СПОСОБ РАБОТЫ НАСОС-КОМПРЕССОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2534655C1 |
| ПНЕВМОГИДРАВЛИЧЕСКИЙ АГРЕГАТ | 2014 |
|
RU2560650C1 |
| Поршневая гибридная энергетическая машина объемного действия с уравновешенным приводом | 2016 |
|
RU2647011C1 |
| ПОРШНЕВОЙ КОМПРЕССОР С АВТОНОМНЫМ ОХЛАЖДЕНИЕМ ЦИЛИНДРА | 2015 |
|
RU2600215C1 |
| ПОРШНЕВОЙ КОМПРЕССОР | 1996 |
|
RU2161732C2 |
Изобретение относится к области компрессоров объемного действия и может быть использовано для повышения их экономичности и быстроходности. Способ заключается в циклическом попеременном уменьшении и увеличении объема рабочей камеры за счет движения в ней рабочего органа. При увеличении объема рабочая камера соединяется с источником, а при уменьшении - с потребителем рабочей газообразной среды с помощью самодействующих всасывающих и нагнетательных клапанов, имеющих подвижные запорные элементы. В течение произвольно выбранного цикла производят измерение отрезка времени от момента прохождения рабочим органом выбранной контрольной точки до момента начала открытия и(или) закрытия клапана tOP. После чего в течение произвольно выбранного числа рабочих циклов производят принудительное открытие и(или) закрытие клапана через промежуток времени t0t от момента прохождения рабочим органом выбранной контрольной точки, определяемый формулой: t0t=tOP-tIN-tEL, где tOP - промежуток времени от момента прохода рабочего органа контрольной точки до момента начала открытия и(или) закрытия клапана под действием перепада давления на запорном элементе, измеряется в произвольно взятом цикле; tEL - время срабатывания механизма принудительного открытия и(или) закрытия клапана; tIN - время запаздывания открытия и(или) закрытия клапана, определяемое силами инерции, действующими на запорный элемент. Описанный способ позволяет организовать близкое к идеальному открытие и закрытие клапанов, практически избавиться от колебаний их запорных элементов, что снижает потери механической работы цикла в процессах всасывания и нагнетания. 2 ил.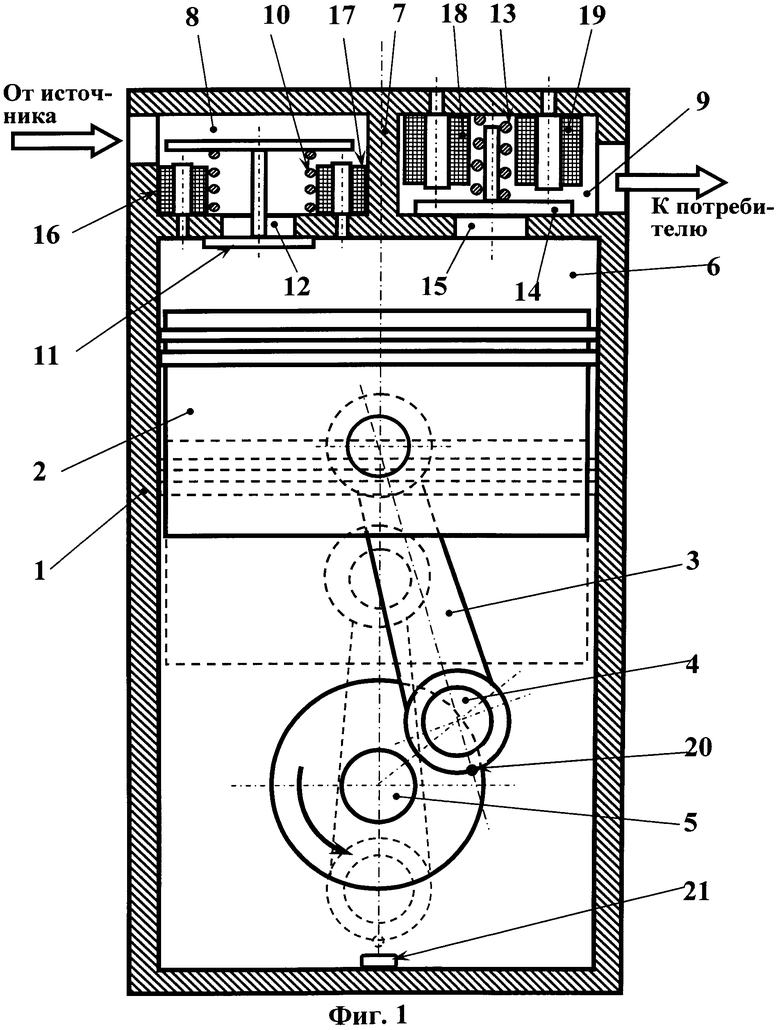
Способ работы компрессора объемного действия, заключающийся в циклическом попеременном уменьшении и увеличении объема рабочей камеры за счет движения в ней рабочего органа, причем при увеличении объема рабочая камера соединяется с источником, а при уменьшении - с потребителем рабочей газообразной среды с помощью самодействующих всасывающих и нагнетательных клапанов, имеющих подвижные запорные элементы, отличающийся тем, что в течение произвольно выбранного цикла производят измерение отрезка времени от момента прохождения рабочим органом выбранной контрольной точки до момента начала открытия и(или) закрытия клапана tOP, после чего в течение произвольно выбранного числа рабочих циклов производят принудительное открытие и(или) закрытие клапана через промежуток времени t0t от момента прохождения рабочим органом выбранной контрольной точки, определяемый формулой
t0t=tOP-tIN-tEL,
где tOP - промежуток времени от момента прохода рабочего органа контрольной точки до момента начала открытия и(или) закрытия клапана под действием перепада давления на запорном элементе, измеряется в произвольно взятом цикле; tEL - время срабатывания механизма принудительного открытия и(или) закрытия клапана; tIN - время запаздывания открытия и(или) закрытия клапана, определяемое силами инерции, действующими на запорный элемент.
| П.И.ПЛАСТИЛИН ПОРШНЕВЫЕ КОМПРЕССОРЫ, М.,КОЛОС, 2000, СТР.12-13, РИС.1.2,1.3 | |||
| Способ стабилизации режима работы электромагнитного компрессора | 1986 |
|
SU1516612A1 |
| CN20177261Y, 02.09.2009 | |||
| CN201546925U, 11.08.2010 | |||

