Область техники
Настоящая заявка относится к способу обеспечения конфиденциальности пользователя, реализуемому с использованием компьютера, компьютерному программному продукту и устройству.
Раскрытие изобретения
Согласно одному аспекту изобретения, предлагается способ обеспечения конфиденциальности пользователя и применимости данных, сообщаемых серверу устройством, таким как транспортное телематическое устройство, реализуемый с использованием компьютера. Способ может включать:
- перемещение устройства в течение промежутка времени;
- прием данных устройством в течение промежутка времени;
- обработку принятых данных с помощью устройства;
- сведение обработанных данных с помощью устройства в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения устройства, и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое устройством в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и
- передачу сведенных данных от устройства к серверу.
Сведéние данных в матрицу, как описано выше, может иметь эффект обеспечения конфиденциальности пользователя и применимости данных, сообщаемых устройством. Причина этого заключается в том, что сведение уменьшает обработанные данные до покрытого расстояния и обстоятельств перемещения, при которых расстояние было покрыто. Таким образом, переданные данные могут не содержать секретных данных пользователя, тем самым обеспечивая его конфиденциальность. Однако, так как переданные данные содержат покрытое расстояние и обстоятельства движения, то переданные данные сохраняют применимость.
Сведéние данных можно понимать как процесс, относящийся к сжатию и агрегации (например, статистической агрегации) данных. В частности, сведение может относиться к преобразованию покрытого расстояния с определенной скоростью в покрытое расстояние с диапазоном скоростей.
Обработанные данные могут содержать, по меньшей мере, одни из данных местоположения, данных скорости и данных времени. Кроме того, данные скорости могут указывать на быстроту (величину скорости), с которой устройство перемещалось. Термин «скорость» может относиться к вектору, имеющему направление и величину. Термин «быстрота» может относиться к величине скорости.
Способ может также включать:
- корреляцию данных местоположения и/или данных скорости и/или данных времени с картографической информацией, сохраненной на устройстве;
- определение, с помощью устройства и на основании корреляции, что пользователь совершил действие с соответствующими последствиями; и
- генерацию, в частности передачу, устройством сигнала тревоги в ответ на действие.
Сигнал тревоги можно понимать как простой способ взаимодействия с пользователем без его отвлечения. Сигнал тревоги может быть передан и может содержать визуальную и/или звуковую индикацию, так, чтобы, по существу, не было никаких отвлекающих сигналов, не относящихся к тревоге. Сигнал тревоги может предоставлять информацию, которая не доступна другим образом пользователю устройства, например, водителю транспортного средства. Соответственно, сигнал тревоги может быть простым способом информирования пользователя о действии. Такое упрощение может также уменьшить расходы, например, расходы на отображение карты.
Кроме того, принимая во внимание сигнал тревоги, пользователь может выполнить поправочное действие, чтобы улучшить вождение (например, отреагировать на тревогу, не вызывать в будущем тревогу и т.п.).
Способ может также включать шифрование, перед передачей, сведенных данных, причем сведенные данные могут быть дешифрованы сервером без помощи пользователя. Дополнительно, способ может включать шифрование, перед передачей, обработанных данных, соответствующих действию, причем обработанные данные могут быть дешифрованы только ключом пользователя. Кроме того, способ может включать передачу зашифрованных обработанных данных от устройства к серверу.
Два различных вида шифрования могут улучшить защищенность обработанных данных. Таким образом, обработанные данные могут быть сохранены на сервере, при этом все еще будет обеспечиваться конфиденциальность пользователя, так как эти данные могут быть доступны только при участии пользователя (например, с помощью секретного ключа пользователя). Посредством шифрования сведенных данных так, что они могут быть дешифрованы без помощи пользователя, сведенные данные могут быть защищены от третьих лиц. Кроме того, сведенные данные могут быть использованы и обработаны на сервере.
Более того, благодаря шифрованию и передаче обработанных данных на сервер только в ответ на действие пользователя уменьшается нагрузка на центральный процессор (CPU) устройства и сокращается сетевой траффик. Тем не менее, на сервере сохраняются данные (зашифрованные обработанные данные) достаточные для того, чтобы полностью документировать действие пользователя, которое вызвало тревогу.
Согласно определенному варианту осуществления изобретения, сведенные данные могут быть зашифрованы с использованием открытого ключа (public key) сервера или секретного ключа, известного пользователю и серверу. Некоторые варианты осуществления изобретения могут предусматривать, что обработанные данные зашифровывают секретным ключом пользователя или открытым ключом пользователя. Кроме того, некоторые определенные варианты осуществления изобретения могут предусматривать одновременную передачу зашифрованных обработанных данных и зашифрованных сведенных данных.
Предопределенные обстоятельства перемещения могут включать одно или несколько из следующих:
- диапазон скорости, с которой устройство покрыло расстояние;
- значение ускорения, с которым устройство покрыло расстояние;
- ограничение скорости, соответствующее, по меньшей мере, одному местоположению в пределах покрытого устройством расстояния;
- категория дороги, соответствующая, по меньшей мере, одному местоположению, пройденному устройством.
Значение ускорения может быть определено с помощью датчика (сенсора), или ускорение может быть вычислено на основе изменения скорости за промежуток времени. Другими словами ускорение может быть определено эмпирически с помощью датчика и/или может быть определено математически, как первая производная скорости по времени и/или вторая производная местоположения по времени, где скорость и/или местоположение можно получить эмпирически с помощью GPS-датчика (от англ. Global Positioning System - глобальная система определения местоположения).
Соответственно, картографическая информация может содержать набор координат карты. Корреляция данных местоположения и данных скорости может также включать корреляцию данных местоположения и данных скорости с категорией дороги и/или ограничением скорости, связанным с набором координат карты.
Кроме того, действие может содержать одно или несколько из следующих:
- превышение ограничения скорости;
- превышения предопределенного значения ускорения;
- приближение к местоположению, которое представляет собой риск для пользователя или нахождение в указанном местоположении.
Более того, устройство может не отображать картографическую информацию.
Соответственно, сигнал тревоги может быть передан и может содержать визуальную и/или звуковую индикацию, так чтобы, по существу, не было никаких отвлекающих сигналов, не относящихся к тревоге. Таким образом, сигнал тревоги может быть простым способом информирования пользователя о действии. Такое упрощение может также уменьшить расходы, например, расходы на отображение карты устройством или на установку усложненного дисплея.
Кроме того, по меньшей мере, один матричный элемент Fij может состоять из множества компонентов, при этом каждый компонент 


Выше 
В некоторых вариантах осуществления изобретения матрица может иметь максимальный размер 30×30. Другими словами, значения i и j могут быть в диапазоне от 0 до максимального значения 29. Также возможно, что максимальное значение будет менее 29. В предпочтительном варианте размер матрицы может быть 26×26. Другими словами, значения i и j могут быть в диапазоне от 0 до 30, предпочтительно от 10 до 30, более предпочтительно от 20 до 30. В некоторых случаях матрица может не быть квадратной (например, экологическая матрица).
В некоторых вариантах осуществления наименьший размер компонента
Соответственно, устройство может быть встроено в транспортное средство. Также, способ может включать компенсацию действий пользователя благодаря тому, что устройство встроено в транспортное средство.
Дополнительно, матрица может быть использована для вычисления указания на характер вождения.
В некоторых вариантах осуществления изобретения способ может включать:
- агрегацию переданных данных с данными от, по меньшей мере, одного другого устройства на сервере,
- генерацию статистических данных на основании агрегированных данных на сервере, и предпочтительно включает
- обеспечение WEB-портала, при этом пользователь может получить доступ к статистическим данным и/или сведенным данным пользователя посредством WEB-портала.
WEB-портал может включать два WEB-портала, причем первый WEB-портал предназначен для доступа к нему с персонального компьютера, а второй WEB-портал предназначен для доступа к нему с телематического устройства. Два WEB-портала могут быть желательны для того, чтобы компенсировать ограниченные возможности телематического устройства. WEB-портал может быть динамическим WEB-порталом, т.е. может определяться устройство, получающее доступ к WEB-порталу, и информация/данные, предоставляемые WEB-порталом, могут адаптироваться для устройства. Таким образом, пользователь, получающий доступ к WEB-порталу через мобильное устройство, такое как PDA (КПК), может принимать другие данные в сравнении с тем, когда доступ к WEB-порталу получают с использованием сетевого компьютера. Соответственно, сеть используется оптимальным образом с учетом устройства, пытающегося осуществить доступ к WEB-порталу.
Отображение сведенных и агрегированных данных на WEB-портале может обеспечить улучшенное взаимодействие человек-машина. Так как пользователь в режиме онлайн получает обратную связь, относящуюся к его характеру вождения и/или расходу топлива, пользователь может выполнить поправочное действие, чтобы улучшить свое вождение (например, избежать риска, снизить расход топлива и т.п.).
Согласно другому аспекту изобретения, предлагается компьютерный программный продукт. Компьютерный программный продукт может включать машиночитаемые инструкции, которые могут быть сохранены на машиночитаемом носителе или предоставлены в виде сигнала данных так, что после загрузки и выполнения на устройстве, таком как транспортное телематическое устройство, инструкции обеспечивали выполнение устройством операций в соответствии с описанным выше способом.
Согласно еще одному аспекту изобретения, предлагается устройство, такое как транспортное телематическое устройство. Устройство может содержать
- приемник, выполненный с возможностью приема данных в течение промежутка времени, причем принятые данные указывают на то, что устройство перемещалось в течение промежутка времени;
- процессор, выполненный с возможностью обработки принятых данных и сведения обработанных данных в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения устройства, и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое устройством в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и
- передатчик, выполненный с возможностью передачи сведенных данных в сервер.
В некоторых вариантах осуществления изобретения устройство является мобильным устройством, таким как мобильный телефон.
Устройство может быть физически встроено в транспортное средство и, при этом, использовать для связи интерфейс транспортного средства.
Такой вариант может снизить затраты на изготовление/установку, а также может снизить техническую сложность устройства, так как позволяет избежать дублирование компонентов транспортного средства в устройстве.
Технические термины
«Телематическое устройство» можно понимать, как телекоммуникационное устройство, выполненное с возможностью передачи, приема и хранения информации. Аналогично, «транспортное телематическое устройство» можно понимать, как телематическое устройство, используемое в дорожном транспортном средстве. Телематическое устройство может быть подключено к GPS-модулю и/или может содержать GPS-модуль. Телематическим устройством может быть смартфон, PDA, нетбук (ноутбук) или другое электронное устройство, которое может быть использовано вместе с транспортным средством или может быть встроено в транспортное средство.
«Пользователя» можно понимать, как личность или физическое лицо. В соответствии с конкретным примером пользователь - это водитель транспортного средства, например, автомобиля.
«Секретный ключ» пользователя можно понимать, как ключ, используемый в симметричном шифровании и дешифровании, который известен только пользователю.
«Личный ключ» (private key) пользователя можно понимать, как ассиметричный ключ шифрования, известный только пользователю. Личный ключ может быть использован как часть пары ключей открытый-личный или может быть использован для цифровой аутентификации (например, цифровой подписи сообщения).
Обеспечение «конфиденциальности» пользователя можно понимать, как осуществление защиты данных пользователя, в частности, защиты секретных данных пользователя. Секретные данные могут включать следующие: данные местоположения, данные времени и идентификационные данные пользователя; секретные данные могут также содержать комбинацию одного или более элементов указанных данных.
Обеспечение «применимости» данных, сообщенных устройством, можно понимать, как предоставление данных, которые полезны получателю сообщенных данных.
«Сведéние» обработанных данных можно понимать, как уменьшение обработанных данных таким образом, что релевантные данные сохраняются, а секретные данные удаляются. Сведение может удалить секретную информацию, в то время как полезная информация сохраняется. Сведéние данных можно понимать, как форму обработки данных. Таким образом, сведение обработанных данных можно понимать, как вид обработки обработанных данных. Кроме этого, сведение можно понимать, как создание матричных элементов из данных.
«Перемещение устройства» может быть выполнено пользователем. Например, устройство может находиться в транспортном средстве, управляемом пользователем, которое перемещается из одного местоположение в другое местоположение. Дополнительно, промежуток времени, в течение которого устройство перемещается, может быть предопределенным. Другими словами, продолжительность промежутка времени может быть определена до того, как устройство будет перемещаться. Продолжительность времени можно включить в программирование устройства до того, как пользователь получает доступ к устройству. Также возможно, чтобы промежуток времени был определен конфигурацией устройства.
«Обстоятельства перемещения» могут быть предопределены. Другими словами, обстоятельства перемещения могут быть определены до того, как устройство будет перемещаться. Обстоятельства перемещения можно включить в программирование устройства до того, как пользователь получает доступ к устройству. Также возможно, чтобы обстоятельства перемещения были определены конфигурацией устройства.
«Пару обстоятельств перемещения» можно понимать как два обстоятельства перемещения, одно соответствующее строке матричного элемента, а другое соответствующее столбцу матричного элемента.
«Расстояние», включенное в матричный элемент, может быть равно 0.
«Данные времени» можно понимать как временную метку, например год, месяц, день, час, минуты, секунды.
«Последствие», соответствующее действию может быть потенциальным последствием, подобным потенциальному штрафу, установленному законом, который, возможно, связан с нарушением скорости. Дополнительно или альтернативно, последствием может быть повышение счетов, выставляемых поставщиком услуг (например, страховой компанией) пользователю.
«Местоположение» можно понимать как точку или определенное место. Местоположение может быть представлено в трех измерениях, т.е. длина, ширина, высота.
Объект изобретения, охарактеризованный в данном описании, может быть осуществлен в виде способа или на устройстве, возможно, в форме одного или более компьютерных программных продуктов. Объект изобретения, охарактеризованный в описании, может быть осуществлен в сигнале данных или на машиночитаемом носителе, причем носитель заключен в одном или более информационных носителях, подобных таким, как CD-ROM, DVD-ROM, полупроводниковая память или жесткий диск. Подобные компьютерные программные продукты могут вызывать выполнение устройством, обрабатывающим данные, одной или более операций, охарактеризованных в описании.
Дополнительно, объект изобретения, охарактеризованный в описании, может также быть осуществлен в виде системы, включающей процессор и память, соединенную с процессором. Память может кодировать одну или более программ так, чтобы вызвать выполнение процессором одного или более способов, охарактеризованных в описании. Кроме этого, объект изобретения, охарактеризованный в описании, может быть осуществлен посредством использования различных машин.
Краткое описание чертежей
Подробности одного или более вариантов осуществления изложены далее в графических материалах, приведенных в качестве примера, и описании. Другие особенности будут очевидны из описания, графических материалов и формулы изобретения.
Фиг.1 иллюстрирует пример телематической системы.
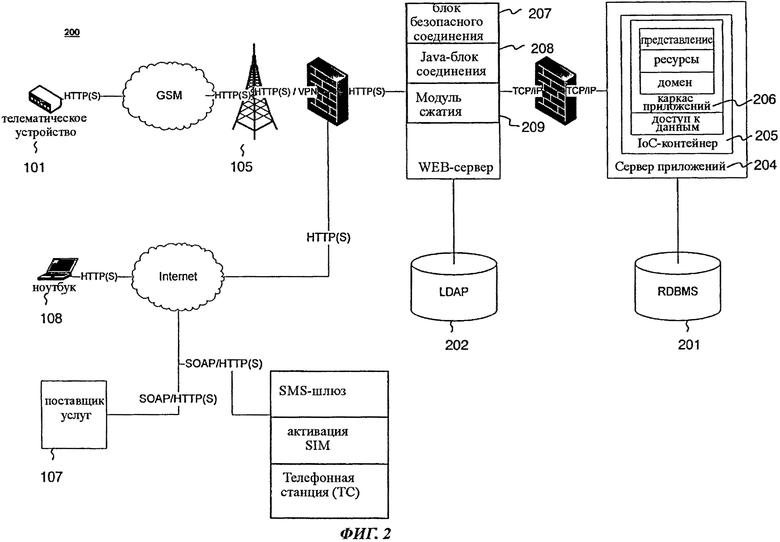
Фиг.2 иллюстрирует пример логической архитектуры телематической системы.
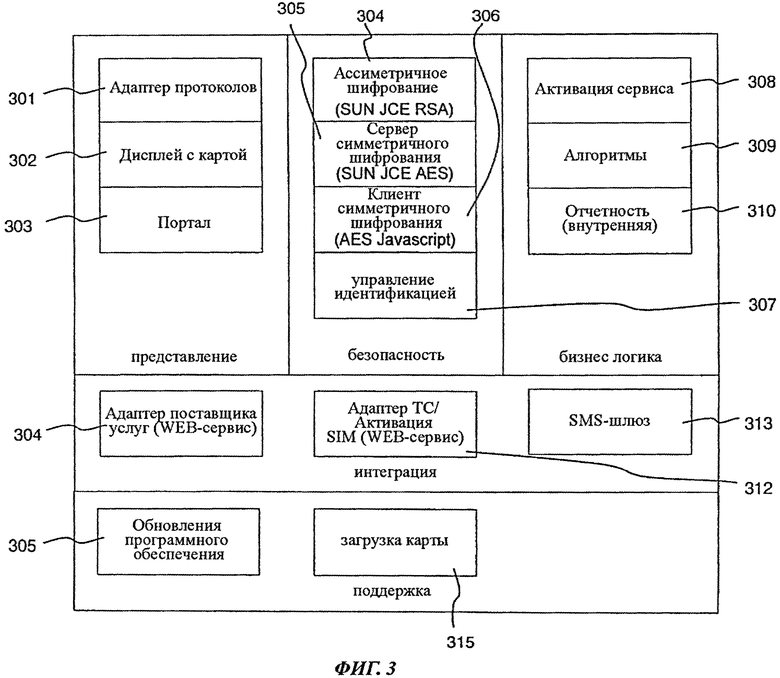
Фиг.3 иллюстрирует пример функциональной архитектуры телематической системы.
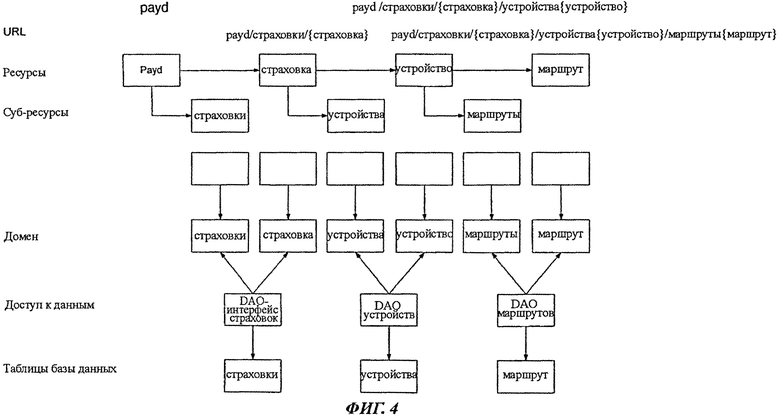
Фиг.4 показывает пример архитектуры программного обеспечения телематической системы.
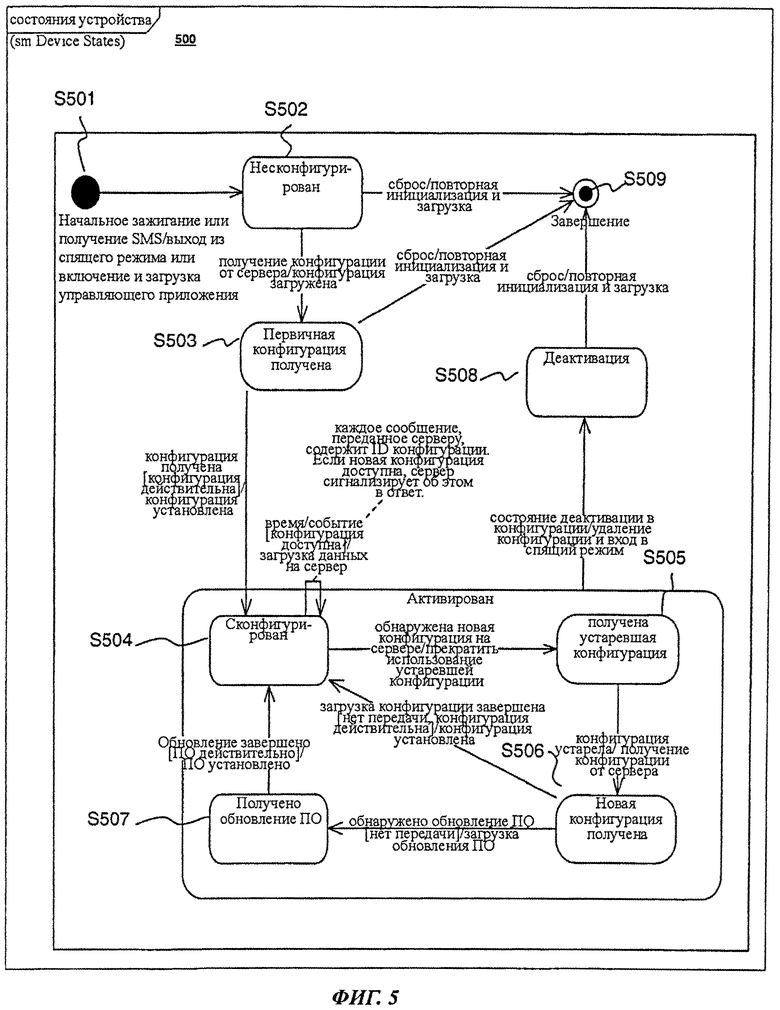
Фиг.5 показывает возможные состояния и смены состояний телематического устройства.
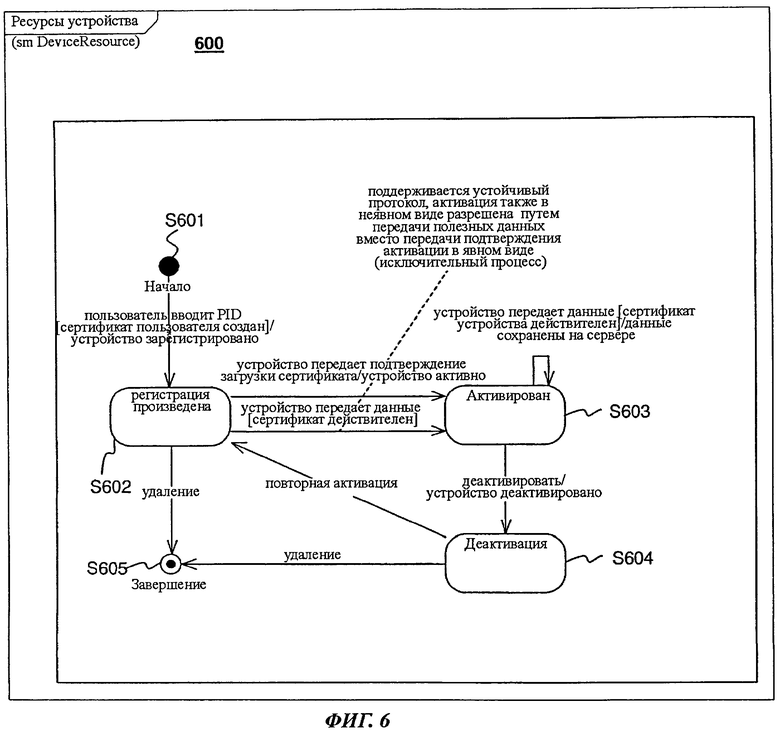
Фиг.6 показывает возможные состояния и смены состояний Платформы Предоставления Услуг (англ. Service Delivery Platform или SDP).
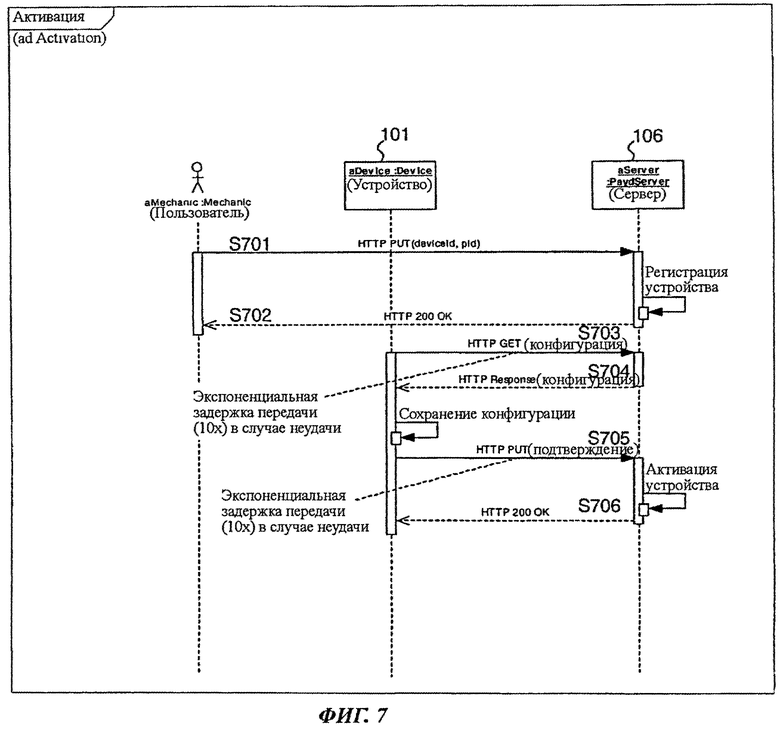
Фиг.7 иллюстрирует примеры действий, которые могут быть выполнены для того, чтобы активировать телематическое устройство.
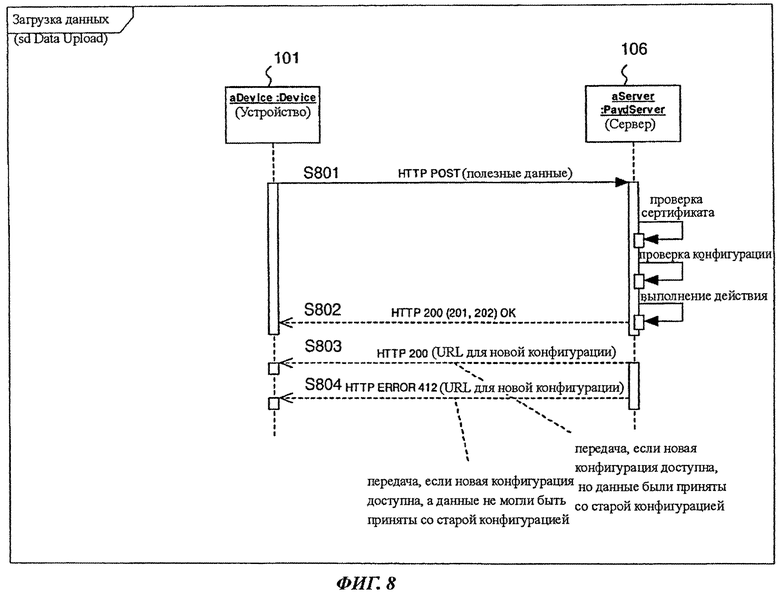
Фиг.8 описывает процесс передачи сообщения о событии от телематического устройства в Платформу Предоставления Услуг.
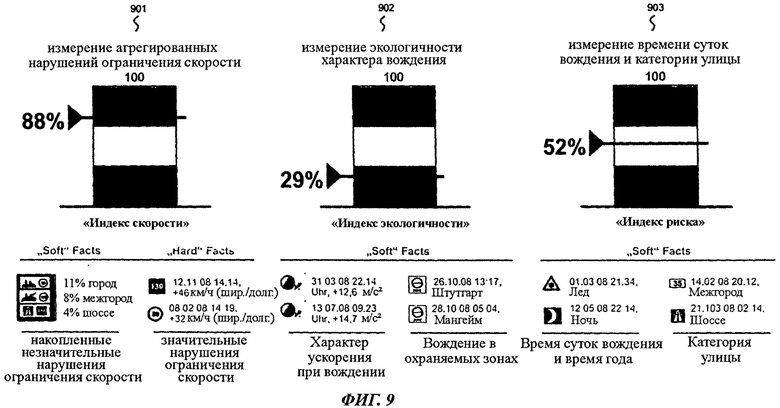
Фиг.9 иллюстрирует отображение на дисплее данных, которые могут быть переданы от Платформы Предоставления Услуг поставщику услуг.
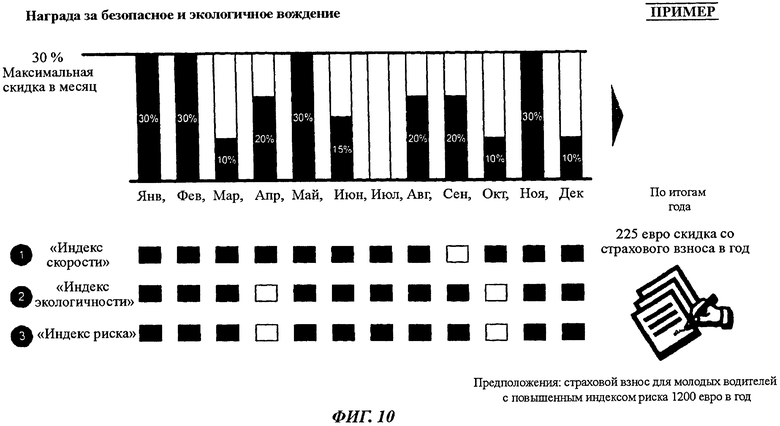
Фиг.10 графически иллюстрирует возможную выгоду от использования телематического устройства.
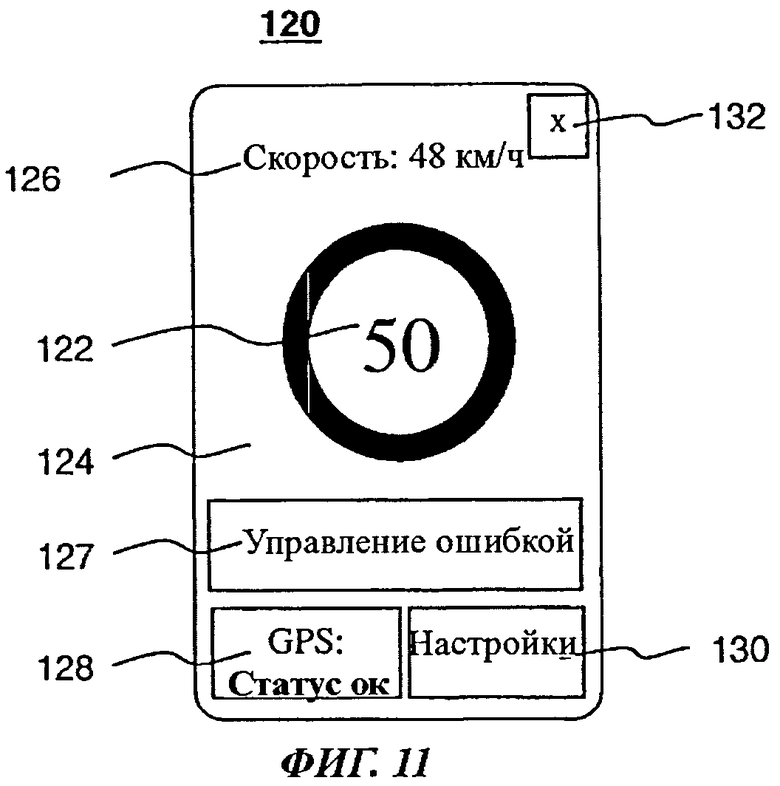
Фиг.11 иллюстрирует пример отображения на дисплее графического интерфейса пользователя (Graphical User Interface, GUI) телематического устройства, на котором показана скорость.
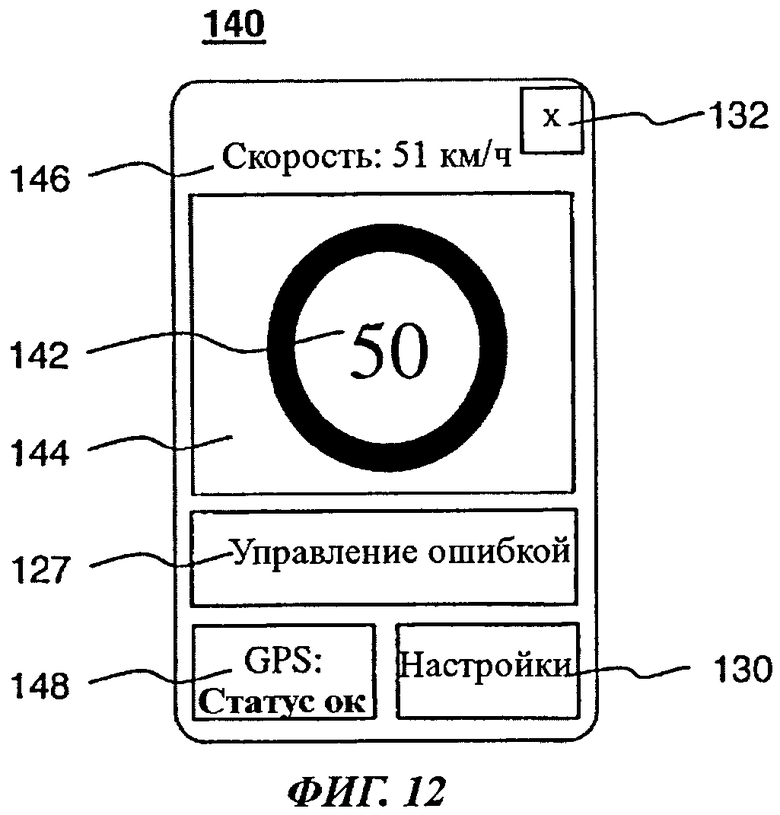
Фиг.12 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором показано предупреждение.
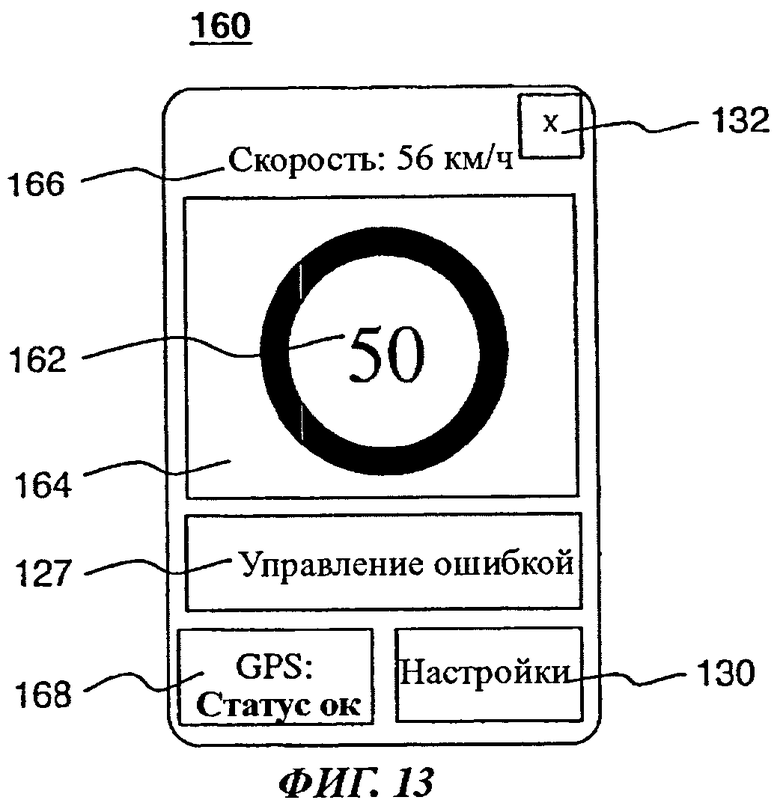
Фиг.13 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором показана тревога.
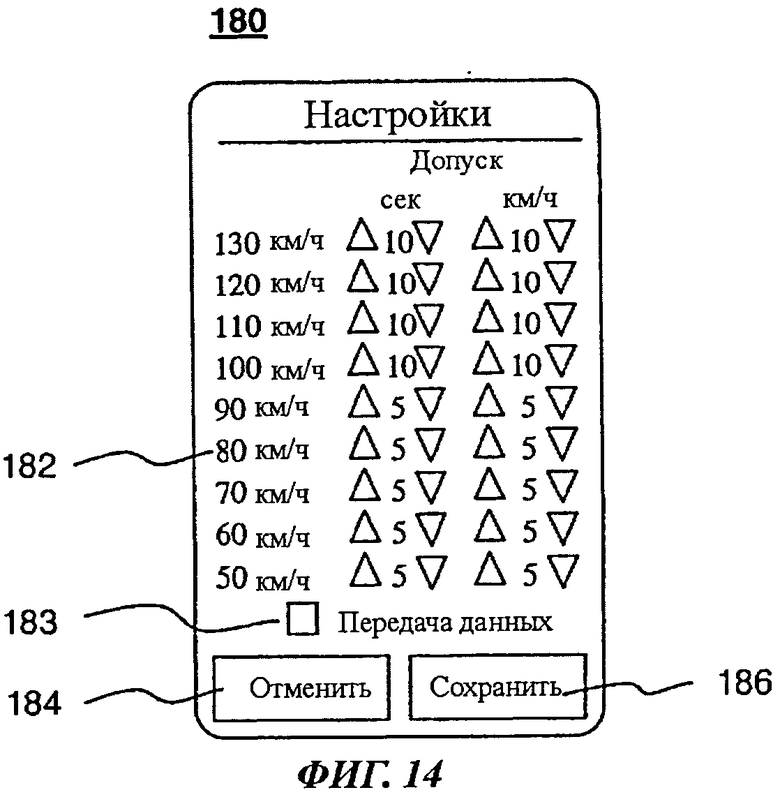
Фиг.14 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором показаны настройки.
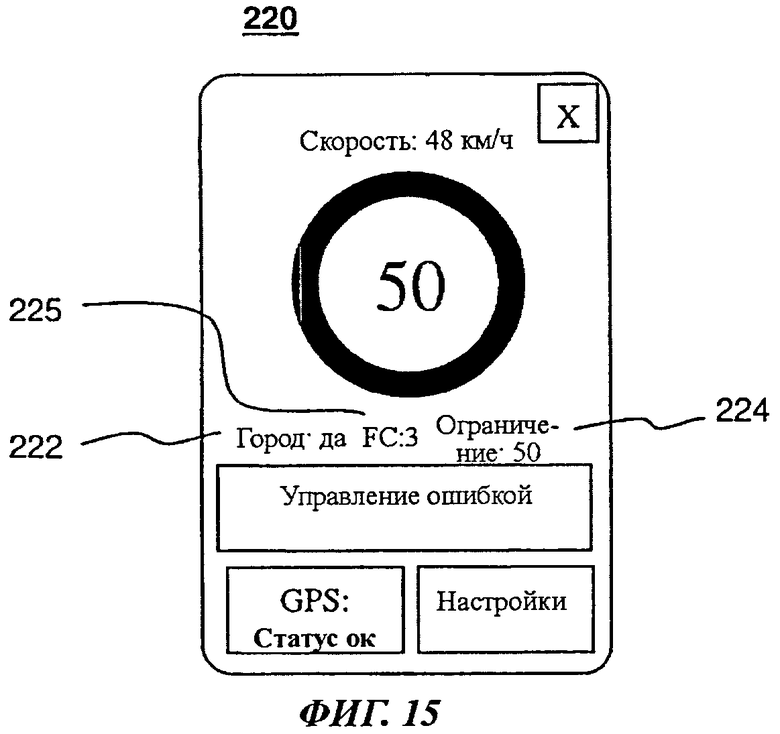
Фиг.15 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором подробно показаны данные скорости.
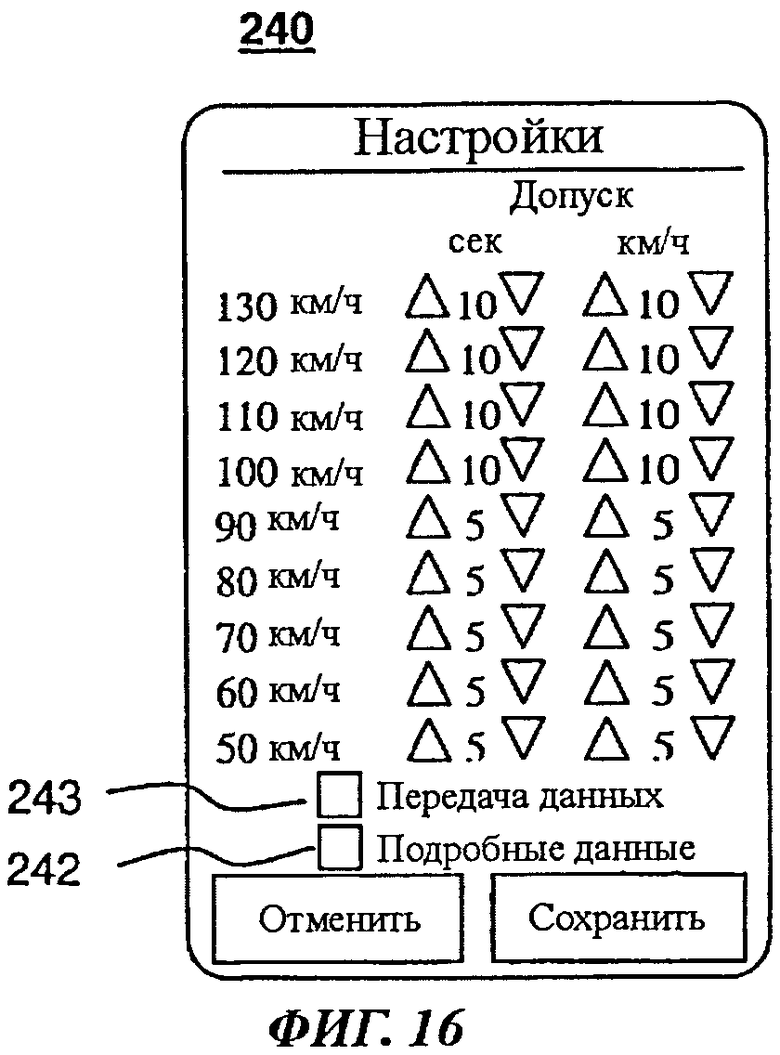
Фиг.16 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором подробно показаны настройки.
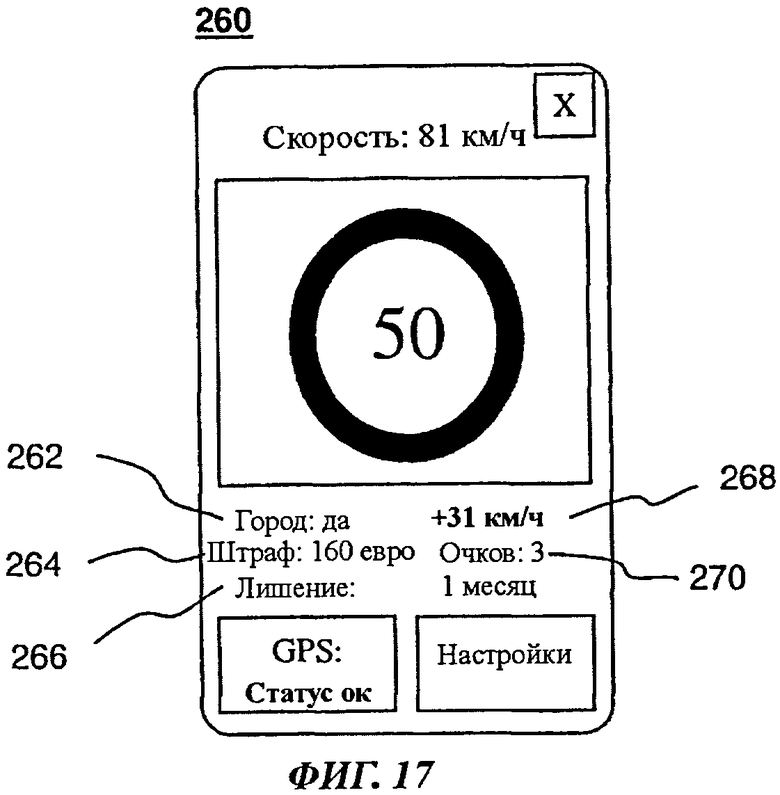
Фиг.17 иллюстрирует пример отображения на дисплее GUI телематического устройства, на котором подробно показана тревога.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Далее по тексту приводится подробное описание примеров со ссылками на графические материалы. Необходимо понимать, что могут быть выполнены различные модификации приведенных примеров осуществления изобретения. В частности, элементы одного примера могут быть объединены и использованы в других примерах для того, чтобы сформировать новые примеры.
На фиг.1 показан пример телематической системы 100. Телематическое устройство 101 может быть расположено в транспортном средстве 102. Транспортное средство 102 может представлять собой легковой или грузовой автомобиль, приспособленный для перевозки пассажиров и для передвижения по дороге. Телематическое устройство 101 может быть оснащено датчиками и может быть приспособлено для подачи звукового отклика 103. Кроме этого, Телематическое устройство 101 может быть оснащено средствами для приема сигналов со спутника 104. Спутник 104 может принадлежать к глобальной спутниковой навигационной системе, например, глобальной системе позиционирования (GPS). Спутник 104 может быть приспособлен для передачи радиоволнового сигнала, который позволяет телематическому устройству определять свое текущее местоположение, текущее время и скорость устройства 102. Телематическое устройство 101 может сводить (или агрегировать) данные, принятые от спутника 104, перед тем, как передавать их посредством поставщика 105 телекоммуникационных услуг в платформу 106 предоставления услуг (SDP).
Платформа 106 предоставления услуг может агрегировать данные от нескольких других телематических устройств для последующего предоставления этих данных поставщику 107 услуг. Поставщик 107 услуг может являться поставщиком автомобильных услуг или, в частности, страховой компанией. Данные, переданные телематическим устройством 101 и SDP 106, могут быть зашифрованы. Данные, переданные от телематического устройства 101 платформе 106 предоставления услуг, могут содержать идентификатор телематического устройства 101. Возможен случай, когда SDP 106 не будет располагать данными, чтобы позволить сопоставить идентификатор телематического устройства 101 с водителем транспортного средства 102. Пользователь 108 может пользоваться услугами поставщика 107 услуг. Пользователя 108 можно также понимать как клиента поставщика 107 услуг. Выставленный пользователю 108 счет за услуги может быть основан на данных, полученных от телематического устройства 101. Пользователь 108 может являться водителем транспортного средства 102.
Телематическое устройство 101 может являться мобильным телефоном, таким как Apple iPhone (Apple и iPhone являются зарегистрированными товарными знаками корпорации Apple), карманным компьютером (PDA), нетбуком и т.п. Телематическое устройство 101 может содержать операционную систему (ОС), такую как Windows Mobile (например, Windows Mobile версии 6.Х), ОС Blackberry, ОС iPhone, ОС Symbian и т.п.Дополнительно или как альтернатива, Телематическое устройство 101 может быть встроено в транспортное средство 102. Другими словами, Телематическое устройство 101 может быть физически встроено в транспортное средство 102, таким образом, что Телематическое устройство 101 не может быть простым образом извлечено из транспортного средства 102. Пользователю 108 может быть предоставлена компенсация благодаря тому, что устройство встроено в транспортное средство 102. В частности, пользователь может получить снижение платежей (например, страхового взноса) за услуги поставщика 107 услуг, потому что Телематическое устройство 101 встроено в транспортное средство 102. Благодаря тому, что Телематическое устройство 101 встроено в транспортное средство 102, пользователю 108 можно воспрепятствовать в поездке на транспортном средстве 102 без телематического устройства 101. Встроенное Телематическое устройство 101 может использовать интерфейс транспортного средства 102 для подачи сигналов тревоги, сгенерированных в ответ на действия пользователя 108.
Возможности телематического устройства, которые не предоставлены операционной системой, например, возможность сведения данных принятых от спутника 104, могут быть предоставлены одним или более приложениями. Приложения могут быть загружены в магазин приложений (например, в один из магазинов приложений, соответствующих корпорации Apple, Android или Blackberry) с помощью SDP 106. Приложения могут быть скачаны из магазина приложений пользователем 108. Приложения могут являться частью платформы услуг, которая предоставляет множество других услуг.
Телематическое устройство 101 может иметь графический интерфейс пользователя (GUI). GUI телематического устройства 101 может быть приспособлен для отображения элементов GUI. Например, GUI телематического устройства 101 может быть приспособлен для отображения одного или нескольких следующих элементов: скорость транспортного средства 102, максимальная разрешенная скорость, соответствующая местоположению транспортного средства 102, статус сигнала спутника 104, элемент ввода настроек (например, кнопка настроек) и элемент ввода ошибки управления (например, кнопка ошибки управления). GUI телематического устройства 101 может обеспечивать ввод данных. Например, GUI телематического устройства 101 может быть использован для изменения допустимого значения (например, времени или скорости), превышение которого является нарушением. Дополнительно или в качестве альтернативы, GUI телематического устройства 101 может быть использован для обозначения ложного нарушения, т.е. нарушения, которое было зарегистрировано ошибочно. В соответствии с конкретным примером, GUI телематического устройства 101 имеет разрешение 800×480 пикселей. Телематическое устройство 101 может содержать приложение для анализа вождения.
Фиг.2 иллюстрирует пример логической архитектуры 200 телематической системы 100. Несмотря на то, что описание фиг.2 относится к конкретным программным компонентам, возможны также другие варианты осуществления (например, с другими компонентами или комбинациями компонентов). Телематическое устройство 101 может связываться с поставщиком 105 телекоммуникационных услуг посредством пакетной радиосвязи общего назначения (GPRS), доступной пользователям глобальной системы связи с подвижными объектами (GSM). В качестве альтернативы GPRS и GSM возможно использование универсальной системы мобильной связи (UMTS), беспроводных сетевых протоколов и т.п. В качестве примера, возможно использование любых коммуникационных систем, выполненных с возможностью передачи приблизительно 20 килобайт в день из мобильного устройства.
Архитектуру, иллюстрированную на фиг.2, можно представить как многоуровневую WEB-архитектуру, выполненную на языке программирования Java, имеющую базу 201 данных, например, с системой управления реляционной базой данных (RDBMS) на серверной части (Java является зарегистрированным товарным знаком корпорации Sun Microsystems).
Архитектура может быть выполнена в соответствии с шаблоном модели представления поведения (model view controller), где представление (view) реализовано посредством языка гипертекстовой разметки (HTML), каскадной таблицы стилей (CSS) и серверной Java-страницы (JSP). Предметная модель логической архитектуры 200 может быть выполнена посредством простых Java-объектов в старом стиле (POJO, plain old Java objects). POJO можно понимать как объект, который не содержит признаков сложных объектных структур, напротив, он содержит только необходимые признаки для выполнения задачи, для которой он предназначен. POJO-объекты предметной модели могут храниться в базе 201 данных. Для того, чтобы обеспечить упрощенную модель доступа, в частности, для соединения с телекоммуникационным устройством 101, может быть использован каркас (framework) 206 передачи состояния представления (REST). Программные компоненты на сервере 204 приложений могут быть подключены к каркасу контейнера 205 с инверсией управления (IoC).
Телематическое устройство 101 может передавать данные посредством GPRS через мобильную телефонную сеть поставщика 105 телекоммуникационных услуг. Данные могут быть переданы посредством виртуальной частной сети (VPN), используя запросы протокола передачи гипертекста (HTTP). Пример HTTP-запроса и HTTP-ответа приведен в таблице 1 ниже.
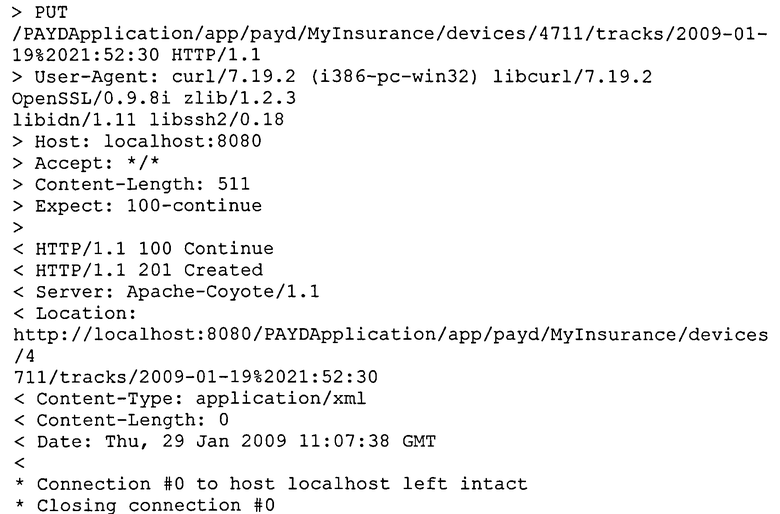
Таблица 1
Перед строками запроса стоит символ «>», перед строками ответа стоит символ «<». HTTP-коды состояний могут быть использованы для подтверждения приема сообщения. Аналогично, HTTP-коды ошибок могут быть использованы для указания на случившиеся проблемы.
В соответствии с конкретным примером, части логической архитектуры 200 могут быть реализованы с использованием конкретных программных компонентов. Так, база 201 данных может быть реализована посредством программного обеспечения MySQL (MySQL является зарегистрированным товарным знаком корпорации Sun Microsystems). Аналогично, сервер 202 с упрощенным протоколом доступа к каталогам (LDAP) может быть реализован посредством открытой реализации OpenLDAP. WEB-сервер 203 может быть реализован с использованием программного обеспечения Apache, и сервер 204 приложений может быть реализован с использованием программного обеспечения Tomcat. IOC контейнер 205 может быть реализован с использованием программного обеспечения Spring, a REST-каркас 206 может быть реализован с использованием интерфейса Jersey (Java API for RESTful Web Services или JAX-RS), и каркас 206 WEB-сервиса может быть реализован с использованием программного обеспечения Spring-WS. Блок 207 безопасного соединения может быть реализован с использованием mod_ssl (т.е. модуля WEB-сервера Apache для SSL), Java-блок 208 соединения может быть выполнен с использованием modjk, и модуль 209 сжатия может быть выполнен с использованием mod_gzip или mod_deflate.
Фиг.3 иллюстрирует функциональную архитектуру 300 телематической системы 100. Адаптер 301 протоколов может выполнять трансляцию проводных протоколов. Например, если сообщения передаются с использованием расширяемого языка разметки (XML) или основанного на Java агентно-ориентированного интерпретатора (Jason), Java-архитектура для XML-связывания (JAXB) может быть использована для трансляции. JAXB может быть использована для установления соответствия (отображения) между XML-элементами и классами языка программирования Java. В случае использования абстрактного синтаксиса данных 1 (ASN.1), может быть использован коммерческий компилятор ASN.1 для выполнения трансляции. Дисплей 302 с картой может быть использован для отображения путей или зависящей от местоположения информации на карте. Путь можно понимать как упорядоченную совокупность точек, которая обеспечивает учет местоположений, где проезжал водитель. Точки на пути могут включать данные местоположения, полученные от телематического устройства 101. Согласно одному из примеров Javascript может быть использован для преобразования данных обмена GPS-информацией (GPX) в необходимый вид для отображения их на экране с использованием программного интерфейса приложения карт Google (Google является товарным знаком корпорации Google). Портал 303 может быть предоставлен для взаимодействия с пользователем и может быть реализован с использованием Spring-контроллера представления для обеспечения WEB-страниц с расширенными возможностями и персонализацией.
Ассиметричное шифрование 304 с открытым ключом и личным ключом может быть использовано для шифрования трафика данных между телематическим устройством 101 и SDP 106. Сервер 305 симметричного шифрования может быть использован для шифрования и дешифрования личных ассиметричных ключей на SDP 106. Клиент 306 симметричного шифрования может быть использован для шифрования и дешифрования личного ассиметричного ключа, например, в WEB-браузере. Ассиметричное шифрование может быть выполнено с использованием алгоритма Райвеста-Шамира-Адлемана (RSA); симметричное шифрование может быть выполнено с использованием улучшенного стандарта шифрования (AES).
В некоторых вариантах осуществления изобретения клиент 306 симметричного шифрования может выполнять шифрование/дешифрование посредством Javascript с использованием криптографических библиотек, например, Javascript Crypto Library (лицензия AGPL), gibberish-AES (лицензия MIT) и т.д. Управление 307 идентификацией может быть осуществлено с использованием LDAP для импорта и хранения сертификатов.
Активация 308 сервиса может быть выполнена с использованием выделенного активационного ресурса. Алгоритмы 309 могут быть использованы для инкапсуляции анализа характера вождения. Отчетность 310 может быть реализована с использованием SQL-скриптов для анализа данных, полученных от телематического устройства 101 и, возможно, от других телематических устройств. Адаптер 311 поставщика услуг может быть реализован в виде WEB-сервиса, который предоставляет для поставщиков услуг доступ к SDP 106, например, для поставщика 107 услуг. Адаптеры 311 поставщика услуг могут быть использованы для обработки данных от новых поставщиков услуг и для доставки анализа индивидуального и статистически агрегированного характера вождения соответствующему поставщику услуг.
Телекоммуникационный адаптер 312 может быть использован для активации модуля идентификации абонента (SIM-карты), который используется вместе с телематическим устройством 101. Телекоммуникационный адаптер 312 может быть реализован с использованием WEB-сервиса. SMS-шлюз 313 может быть использован для отправки SMS-сообщений (Short Message Service, Служба Коротких Сообщений), в частности, бинарных SMS-сообщений. SMS-шлюз 313 может быть реализован с использованием WEB-сервиса. Приложение 314 для обновления программного обеспечения может быть использовано для передачи обновлений программного обеспечения телематическому устройству 101. Согласно одному из примеров, для инициации передачи данных может быть использован GET-запрос типа REST, а для инициации загрузки данных телематическим устройством 101 может быть использовано сообщение от SMS-шлюза 313. Приложение 315 для загрузки карт может быть использовано для передачи обновлений карт телематическому устройству 101. Согласно одному из примеров GET-запрос типа REST может быть использован для передачи данных, а для инициации загрузки карты может быть использовано SMS-сообщение.
На фиг.4 детально представлены программные уровни сервера приложений и структура универсального указателя ресурса (URL) для сообщений, отправляемых телематическим устройством 101.
На фиг.5 и 6 показаны состояния и смены состояний телематического устройства 101 и SDP 106.
На фиг.5 показаны возможные состояния и смены состояний телематического устройства 101. В частности, диаграмму 500 смен состояний устройства можно понимать, как диаграмму, которая показывает этапы, необходимые для реализации обновления программного обеспечения или конфигурации на телематическом устройстве 101. Процесс начинается с этапа S501: либо с исходного зажигания на транспортном средстве 102, либо с приема SMS-сообщения телематическим устройством 101. Исходное зажигание или прием SMS-сообщения может вызвать выход телематического устройства 101 из спящего режима или может вызвать включение и загрузку управляющего приложения. На этапе S502 телематическое устройство 101 не имеет доступную конфигурацию, которую можно было бы загрузить. Данная проблема может быть решена загрузкой конфигурации с SDP 106 на этапе S503. После того, как конфигурация получена от SDP 106, она может быть загружена на этапе S504. Каждое сообщение, отправляемое телематическим устройством 101 платформе SDP 106, может содержать идентификатор конфигурации. SDP 106 может указать на то, что доступна новая конфигурация, при подтверждении приема сообщения о событии от телематического устройства 101.
На этапе S505 телематическое устройство 101 принимает сообщение от SDP 106, указывающее на то, что доступна новая конфигурация. Телематическое устройство 101 может загрузить новую конфигурацию с SDP 106 на этапе S506. Опционально, дополнительное обновление программного обеспечения может быть загружено на этапе S507. Как только новая конфигурация была установлена, возможно вместе с дополнительным программным обеспечением, телематическое устройство 101 возвращается на этап S504. На этапе S508 телематическое устройство может быть выключено или деактивировано. Телематическое устройство 101 может удалить текущую конфигурацию перед выключением. После деактивации телематическое устройство 101 может получить инструкции по сбросу (перегрузке) на этапе S509. Инструкции по сбросу на этапе S509 могут быть даны при различных обстоятельствах, возможно, для того чтобы решить проблему и вернуть устройство к конфигурации по умолчанию или к стандартной конфигурации.
На фиг.6 показаны возможные состояния и смены состояний SDP 106. В частности, диаграмму 600 смен состояний можно понимать как диаграмму, которая показывает этапы, необходимые для активации и деактивации телематического устройства 101. Процесс начинается с этапа S601, когда пользователь вводит идентификатор для того, чтобы сгенерировать сертификат пользователя. Телематическое устройство 101 регистрируется на этапе S602. После проверки действительности сертификата пользователя устройство может быть активировано на этапе S603. После получения указания или инструкции телематическое устройство 101 может быть деактивировано на этапе S604. Повторная активация устройства может быть выполнена с помощью передачи сертификата пользователя вместе с данными о событии. Телематическое устройство 101 может быть удалено из SDP 106 на этапе S605.
На фиг.7 приведен пример того, как активировать телематическое устройство 101. Активация телематического устройства 101 может быть выполнена с использованием HTTP с REST-семантикой. На этапе S701 пользователь может осуществить доступ к SDP 106. Согласно конкретному примеру, HTTP-сообщение, содержащее PUT-запрос, идентификатор телематического устройства 101 (ID устройства) и идентификатор пользователя (PID), может быть отправлено от пользователя в платформу SDP 106. SDP 106 может зарегистрировать телематическое устройство 101 и затем отправить подтверждающее сообщение пользователю на этапе S702.
На этапе S703 телематическое устройство 101 может попытаться загрузить новую конфигурацию с SDP 106. В случае, если первоначальный запрос конфигурации от телематического устройства 101 неудачен, новый запрос может быть передан с экспоненциальной задержкой передачи. Экспоненциальную задержку передачи можно понимать, как продолжение удвоения времени между повторными передачами, в случае, если первоначальный или последующий запрос оказался неудачным (W.Richard Stevens, "TCP/IP Illustrated Volume 1”, 1994, 299 страниц). На этапе S704 телематическое устройство 101 может принять конфигурацию от SDP 106. Телематическое устройство 101 может сохранить принятую конфигурацию. На этапе S705 телематическое устройство 101 может инициировать активацию с SDP 106. Если подтверждение переданного на этапе S705 сообщения не получено, телематическое устройство 101 может повторить попытку с экспоненциальной задержкой. Телематическое устройство 101 может принять подтверждение активации от SDP 106 на этапе S706.
На фиг.8 описывается процесс передачи сообщения о событии от телематического устройства платформе SDP 106. Телематическое устройство 101 может принять спутниковые данные от спутника 104. Позже телематическое устройство 101 может обработать принятые спутниковые данные. Кроме этого, телематическое устройство может выполнить сведение обработанных данных. Сведение может представлять собой дальнейшую обработку обработанных данных.
На этапе S801 телематическое устройство 101 может передать сообщение о событии платформе SDP 106. Сообщение о событии может содержать идентификатор для телематического устройства 101 и сведенные данные. Телематическое устройство 101 может выполнить сведение обработанных спутниковых данных с помощью вычисления матриц с последующей отправкой матриц платформе SDP 106 через постоянные промежутки времени.
Матрица, передаваемая от телематического устройства 101 платформе SDP 106, может быть матрицей скоростей. Матрица скоростей может отражать характер вождения пользователя 108 относительно скорости движения в общем и ограничения скорости в частности. Нижеприведенные обозначения можно отнести к матрице скоростей и, если не указано обратное, к экологической матрице характера вождения и также к матрице риска.
Пусть s: ℝ→ℝ3, где 
Пусть v: ℝ→ℝ, где 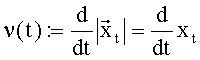
φ: ℝ→ℝ×ℝ3 ℝ2, где 
Вычисление покрытого транспортным средством 102 расстояния может быть выполнено с помощью общей весовой функции Ω в виде интеграла функции пройденного расстояния, как описано ниже:
пусть 

ω - линейная функция, тогда си будет иметь следующие свойства (1 и 2):

Другими словами, ω линейно зависима от позиционных компонентов
покрытого расстояния. Кроме этого,

Другими словами, ω равна 0, когда длина покрытого расстояния равна 0.
Следующие допущения могут повысить эффективность вычислений и облегчить осуществление алгоритма на телематическом устройстве 101:
(1) временная зависимость: Ω зависит только от длины временного интервала, т.е. промежутка времени, в течение которого осуществлялось вождение;
(2) пространственная зависимость: Ω зависит только от категории дороги, т.е. категории улицы.
Пусть Ωαβ определена согласно допущениям (1) и (2). Отсюда, 0≤α≤n, 0≤β≤m, где

где 
Допущения (1) и (2) позволяют проще вычислить сумму Ωαβ для Ω.
Соответственно, Ωαβ зависит только от величины скорости транспортного средства 102 и разрешенной максимальной скорости.
Для вычисления интеграла 
Пусть I=∪[νi,νi+1) - дизъюнктивное разложение интервала [0,νmax]⊂ℝ. Тогда,

определяет разложение s.
Для дизъюнктивного разложения I=∪[νi,νi+1) соответствующая аппроксимация Римана 

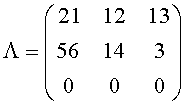
где матрица Λαβ определена следующим образом (Παβ определяет проекцию на временной интервал и категорию дороги, а / определяет длину, т.е. длину покрытого расстояния):

Телематическое устройство 101 может эффективно вычислить параметры разложения, описанного выше. Телематическое устройство 101 может вычислять и передавать вычисленные матрицы платформе SDP 106 через постоянные промежутки времени. В SDP матрицы будут обработаны в соответствии с уравнением (5). Проведение конфигурации параметров для каждой матрицы скоростей на SDP 106 может являться преимуществом.
Каждая последующая строка матрицы Λαβ скоростей может соответствовать вождению при увеличении ограничения скорости. Также, каждый последующий столбец матрицы скоростей может соответствовать увеличенному диапазону скорости. Ограничение скорости и диапазон скорости можно понимать как обстоятельства перемещения. Таким образом, каждый матричный элемент матрицы скоростей представляет расстояние, пройденное в области с ограничением скорости, определенным в строке, при движении транспортного средства 102 с величиной скорости (быстротой), находящейся в диапазоне скорости, определенном столбцом.
Например, матрица скоростей размерности 3×3, переданная телематическим устройством 101, может содержать следующие значения:
Каждая последующая строка указанной матрицы представляет ограничение скорости с разницей в 50 км/ч (начиная с 50 км/ч на первой строке, заканчивая 150 км/ч на третьей строке). Каждый последующий столбец представляет диапазон скорости с разницей в 50 км/ч (начиная с 0-50 км/ч в первом столбце, заканчивая 100-150 км/ч в качестве примера обстоятельства перемещения на третьем столбце). Следовательно, парой обстоятельств перемещения для матричного элемента на первой строке первого столбца являются диапазон скорости 0-50 км/ч и ограничение скорости 50 км/ч, при этом значение матричного элемента равно 21 км. Таким образом, согласно указанной матрице, транспортное средство 102 проехало 119 км в течение временного интервала, покрытого матрицей, т.е. множество матричных элементов определяют расстояние, покрытое транспортным средством за промежуток времени, как расстояние равное 119 км. Временной интервал можно понимать как предопределенный промежуток времени (например, один день или два дня).
Элемент на строке 1 столбца 1 указывает, что 21 км был покрыт со скоростью от 0 до 50 км/ч (причем диапазон от 0 до 50 км/ч представляет собой пример обстоятельства перемещения) в области, где установлено ограничение скорости 50 км/ч (причем ограничение скорости 50 км/ч представляет собой пример обстоятельства перемещения). Кроме этого, элемент на строке 2 столбца 1 показывает, что транспортное средство 102 проехало 56 км со скоростью от 0 до 50 км/ч в области, где установлено ограничение скорости 100 км/ч (диапазон скорости от 0 до 50 км/ч и ограничение скорости 100 км/ч - это примеры обстоятельств перемещения). Элемент на строке 1 столбца 2 показывает, что транспортное средство 102 проехало 12 км со скоростью от 50 до 100 км/ч в области, где установлено ограничение скорости 50 км/ч. 12 км, представленные на строке 1 столбца 2, 13 км, представленные на строке 1 столбца 3, и 3 км, представленные на строке 2 столбца 3 данной матрицы, указывают на нарушение ограничения скорости. Так как транспортное средство не проезжало в области с ограничением скорости 150 км/ч, данная строка матрицы заполнена нулями.
Для удобства иллюстрации в этом примере интервалы сделаны большими, а матрица небольшой. В другом варианте осуществления интервалы для строк и столбцов могут быть менее 10 км/ч. Таким образом, матрица скоростей может иметь, по меньшей мере, 15 строк и/или, по меньшей мере, 15 столбцов и 225 элементов.
Матрицы скоростей Λαβ, вычисленные телематическим устройством 101, могут быть сгенерированы с использованием кода, основанного на псевдокоде в таблице 2.
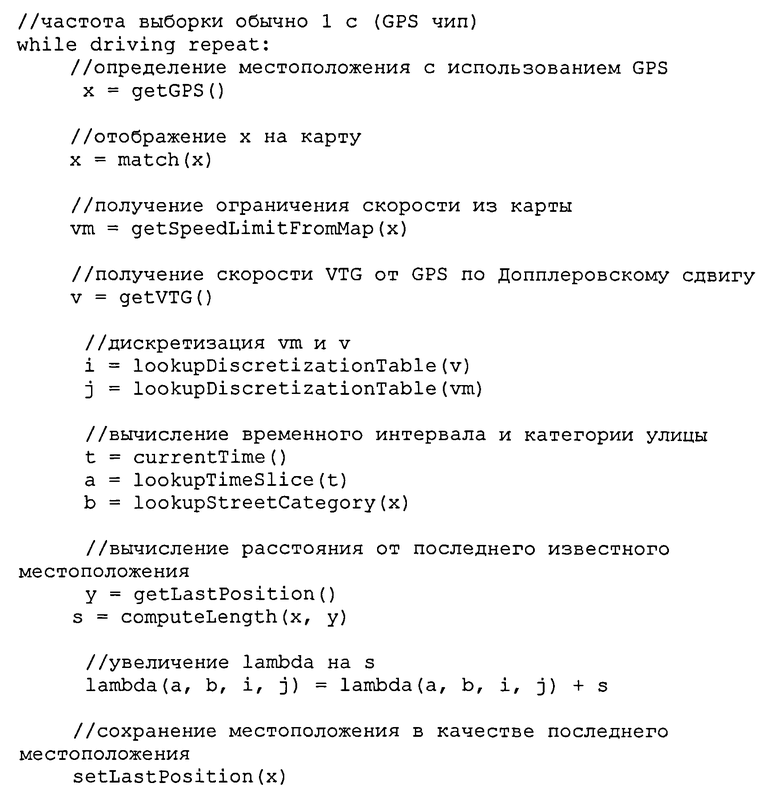
Таблица 2
Дополнительный код может быть использован для загрузки матрицы на SDP 106 и сброса значений матрицы на 0.
Взвешенная матрица скоростей Ωαβ может быть вычислена на SDP 106. Ωαβ может иметь следующие ограничения:
(1) Ωαβ неотрицательна, то есть 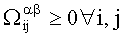
(2 - монотонность) ∀i: 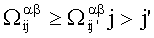
(3 - масштабирование) ∀j: 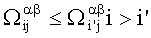
(4 - пороговое значение) 
Применение ограничения (4 - пороговое значение) может увеличить эффективность вычисления Ωαβ.
В уравнении (1) измерение скорости s может быть линейным по отношению к покрытому расстоянию. Это можно понимать как то, что существенное расстояние (т.е. большое количество пройденных километров) ведет к существенному (т.е. высокому) измерению скорости. Отсюда следует уравнение (6) нормирования.

Уравнение (6) можно отнести к оценке скорости для s. Оценка скорости может быть использована в качестве основы для дальнейшего анализа и может оказать влияние на счета, выставляемые поставщиком 107 услуг клиенту 108.
Матрицей другого типа, которую передает телематическое устройство 101 платформе SDP 106, может быть матрица, сводящая характер вождения в отношении экологии, т.е. экологическая матрица. Экологическая матрица может отражать характер вождения пользователя 108 в отношении потребления топлива, причем потребление топлива может быть функцией от величины скорости транспортного средства 102 и ускорения транспортного средства 102 (включая отрицательное ускорение).
В некоторых вариантах осуществления значение ускорения может быть определено с использованием датчика в транспортном средстве 102. Также значение ускорения может быть вычислено на основании изменения скорости в течение промежутка времени.
Пусть s: ℝ→ℝ2 определяет параметризацию покрытого расстояния, как описано выше, в отношении матрицы скоростей. Далее, пусть v: ℝ→ℝ, где 
Вычисление покрытого транспортным средством 102 расстояния может быть выполнено с помощью общей весовой функции Θ в виде интеграла функции пройденного расстояния, как описано ниже:
пусть Θ(ν,a): ℝ×ℝ→ℝ+ будет весовой функцией, тогда

определяет измерение экологичности для s.
ϑ является линейной функцией. Соответственно ϑ имеет следующие свойства (3 и 4):

Другими словами, ϑ линейно зависима от позиционных компонентов покрытого расстояния. Кроме этого,

Другими словами, ϑ равна 0, когда длина покрытого расстояния равна 0.
Дискретизация [0,νmax]×[amin,amax]⊂ℝ×ℝ может быть определена как:

где уравнение (8) определяет разложение s. Возможно, что аmin будет меньше 0, так как возможно отрицательное ускорение (т.е. торможение). Это является отличием от величины скорости, которая всегда положительна.
Для sij соответствующая аппроксимация Римана RI принимает вид:

где матрица Λ определена таким же образом, как Λαβ в уравнении (5).
Каждая последующая строка экологической матрицы Л может соответствовать вождению при увеличении диапазона скорости. Также каждый последующий столбец экологической матрицы может соответствовать увеличению ускорения. Таким образом, каждый матричный элемент экологической матрицы характера вождения соответствует расстоянию, проезжаемому в определенном диапазоне скоростей и при определенном значении (или уровне) ускорения. Диапазон скорости и значение ускорения можно понимать, как обстоятельства перемещения.
Например, экологическая матрица размерности 3×9, переданная телематическим устройством 101, может содержать следующие элементы:
Каждая последующая строка отличается от предыдущей на 50 км/ч, т.е. между строками шаг в 50 км/ч. Соответственно, первая строка определяет диапазон скорости 0-50 км/ч, причем диапазон скорости 0-50 км/ч является примером обстоятельства перемещения. Вторая строка определяет диапазон скорости 50-100 км/ч, и третья строка определяет диапазон 100-150 км/ч, причем диапазоны скорости 50-100 км/ч и 100-150 км/ч являются примерами обстоятельств перемещения. Каждый последующий столбец отличается от предыдущего на 1 м/с2, где минимальное значение равно -4 м/с2 (столбец 1), а максимальное значение равно 4 м/с2 (столбец 9). Значения -4 м/с2 (столбец 1) и 4 м/с2 (столбец 9) являются примерами обстоятельства движения. Каждый элемент матрицы определяет количество пройденных километров в диапазоне скорости, определенном строкой, и при ускорении, определенном столбцом. Таким образом, пара обстоятельств перемещения для матричного элемента в строке 1 столбца 1 - это диапазон скорости 0-50 км/ч и отрицательное ускорение -4 м/с2, а значение матричного элемента равно 0.
Согласно примеру, транспортное средство 102 проехало 267 км за временной интервал, определенный для матрицы (т.е. временной интервал, покрытый матрицей). Это может быть определено просто путем суммирования значений матрицы. Далее, элемент в строке 2 столбца 5 матрицы показывает, что транспортное средство 102 проехало 100 км со скоростью в диапазоне 50-100 км/ч и с ускорением меньшим, чем 1 м/с2. Кроме этого, элемент в строке 3 столбца 1 матрицы показывает, что транспортное средство 102 проехало 1 км со скоростью в диапазоне 100-150 км/ч и с ускорением -4 м/с2.
Экологическая матрица необязательно должна быть симметричной. Например, может быть целесообразным определять столбцы, начиная с минимального значения -10 м/с2, т.е. максимального замедления транспортного средства при полном использовании тормозной системы, и заканчивая максимальным значением 6 м/с2, которое соответствует разгону транспортного средства от 0 до 100 км/ч за 5 секунд. При движении в нормально трафике, ускорение и торможение обычно укладываются в диапазон от -2 м/с2 до 2 м/с2.
Экологическая матрица может быть вычислена с использованием кода, основанного на псевдокоде, показанном в таблице 3. В псевдокоде, показанном в таблице 3, ускорение транспортного средства 102 вычисляется на основе изменения величины скорости транспортного средства 102. Однако возможны и другие варианты осуществления, например, использование датчика для определения ускорения транспортного средства 102.
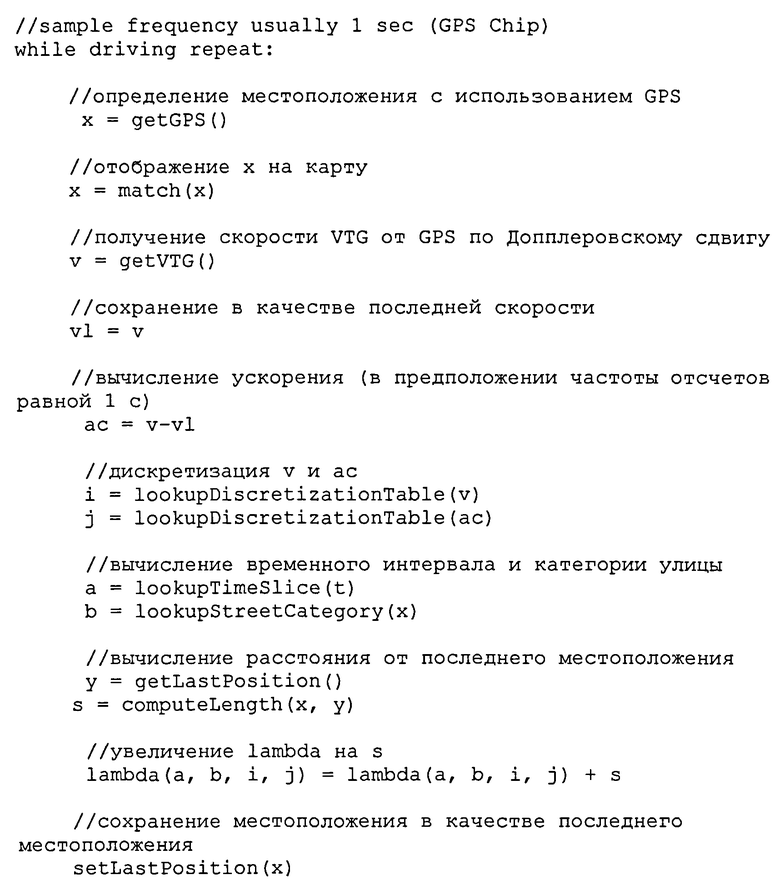
Таблица 3
Дополнительный код может быть использован для загрузки экологической матрицы Л на SDP 106 и сброса значений матрицы на 0.
Взвешенная экологическая матрица Θ может быть вычислена на SDP 106. Θ может иметь следующие ограничения:
(1) Θ неотрицательна, то есть Θij≥0∀i,j,
(2 - монотонность) ∀i: Θij≥Θij'j>f', то есть ускорению присваивается вес, растущий пропорционально величине ускорения.
(3 - масштабирование) ∀j: Θij≥Θi'ji>i', то есть с увеличением скорости транспортного средства 102 величина ускорения становится более релевантной.
(4 - идеальная скорость) Θij=0∀imin≤i≤imax.
Ограничение (4) отражает информацию, согласно которой большинство легковых автомобилей расходуют малое количество топлива, когда скорость их движения лежит в диапазоне, например, 70-100 км/ч.
Функция, определенная в уравнении (7), т.е. измерение экологичности для s, может быть линейно зависимой от покрытого расстояния. Это можно понимать как то, что существенное расстояние (т.е. большое количество пройденных километров) ведет к существенному (т.е. высокому) измерению экологичности. Отсюда следует уравнение (9) нормирования:

Уравнение (9) можно назвать оценкой экологичности для s. Оценка экологичности может быть использована в качестве основы для дальнейшего анализа и может оказать влияние на счета, выставляемые поставщиком 107 услуг клиенту 108.
Матрицей еще одного типа, которую передает телематическое устройство 101 платформе SDP 106, может быть матрица, в которой сведены (или агрегированы) риски (опасности), соответствующие категориям дорог, по которым проезжает транспортное средство 102, и риски, соответствующие времени суток, в которое осуществлялось перемещение транспортного средства 102 (т.е. матрица риска). Таким образом, категорию дороги и время суток вождения транспортного средства 102 можно понимать, как пару обстоятельств перемещения. Категория соответствующей местоположению дороги может быть определена на основе того, является ли дорога городской (т.е. область городской застройки) или дорога находится вне города. Матрица риска может быть определена согласно следующему описанию.
Пусть Δαβ:=l(Παβ) является мерой покрытого (или пройденного) расстояния в течение промежутка времени (т.е. временного интервала) а по дороге, соответствующей категории β. Пусть Pαβ будет любой подходящей матрицей. Тогда

Уравнение (10) определяет измерение риска для s.
Матрица Рαβ имеет следующее свойство:
Рαβ неотрицательна, то есть 
Результат уравнения (10) линейно соответствует покрытому расстоянию. Это означает, что существенное расстояние (т.е. большое количество пройденных километров) ведет к высокому измерению риска.
Уравнение

называется оценкой риска для s.
Оценка риска может влиять на счета, выставляемые поставщиком 107 услуг пользователю 108. Матрица риска может быть реализована на телематическом устройстве 101 с использованием кода, основанного на псевдокоде в таблице 4.
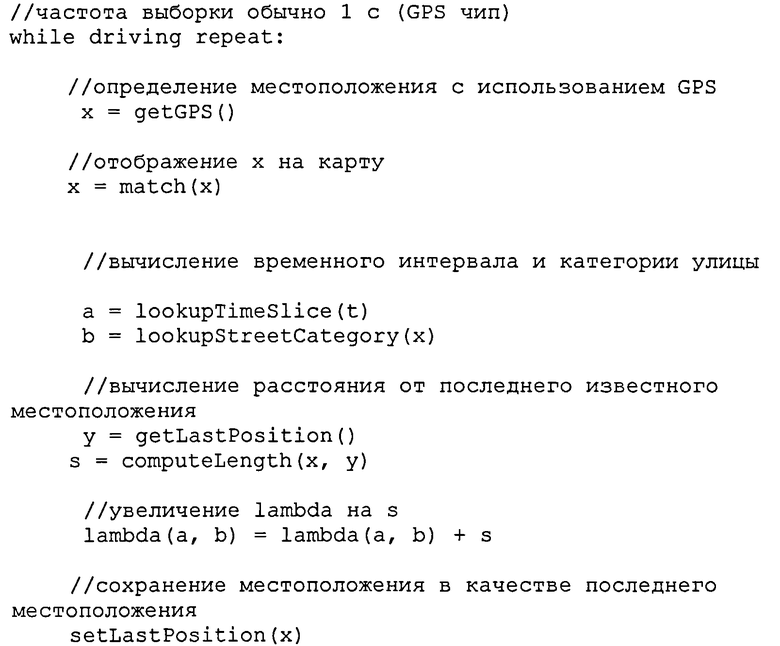
Таблица 4
Дополнительный код может быть использован для загрузки матрицы риска на SDP 106 и сброса значений матрицы на 0.
Матрица скоростей, экологическая матрица и матрица риска каждая может содержать множество матричных элементов. Каждый матричный элемент может состоять из множества компонентов. Например, элемент в строке 2 столбца 1 матрицы скоростей имеет значение 56 км. 56 км можно понимать, как расстояние, покрытое при паре обстоятельств перемещения, определенных строкой 2 и столбцом 1 (т.е. ограничение скорости 100 км/ч и диапазон скорости 0-50 км/ч). Промежуток времени, запрограммированный в устройстве, определен, как одни сутки. В соответствии с примером, матричный элемент со значением 56 км состоит из 3 компонентов. Первый компонент был записан в матричный элемент, когда пользователь 108 вел транспортное средство 102 20 км со скоростью 40 км/ч в области, где установлено ограничение скорости 100 км/ч. Второй компонент был записан позже, в период времени, когда пользователь 108 вел транспортное средство 102 20 км со скоростью 30 км/ч в другой области, где ограничение скорости тоже 100 км/ч. Третий компонент был записан еще позже, в период времени, когда пользователь 108 вел транспортное средство 102 16 км со скоростью 35 км/ч в еще одной области, где ограничение скорости равно 100 км/ч. Друге компоненты различных матричных элементов могли быть записаны в то же время, в которое были записаны компоненты указанные в примере.
В некоторых ситуациях возможно, что данные местоположения загружают в SDP 106 вместе с одной или несколькими матрицами. Данные местоположения могут быть загружены, когда пользователь совершает действие с соответствующими последствиями. Действие может быть небезопасным вождением (например, с нарушением ограничения скорости), вождением с неблагоприятными последствиями для окружающей среды (например, с большим ускорением), вождением в опасных областях (например, на обледеневших поверхностях) или вождением в опасное время суток (например, ночью). Последствием может быть повышение счета, выставленного пользователю 108 поставщиком 107 услуг. Когда данные местоположения загружены на SDP 106, они могут быть зашифрованы с использованием секретного ключа пользователя. Шифрование данных местоположения с использованием ключа пользователя может защитить конфиденциальность пользователя. Пользователь 108 может разрешить платформе SDP 106 или поставщику 107 услуг дешифровывать данные местоположения для того, чтобы избежать дополнительных расходов (например, пользователь может использовать данные местоположения для того, чтобы показать, что он не был в указанном месте, когда действие было совершено).
SDP 106 может подтвердить прием сообщения о событии на этапе S802. На этапе S803 в дополнительном сообщении или в том же подтверждающем сообщении SDP 106 может предоставить URL для новой конфигурации телематического устройства 101. Этот URL может быть использован для загрузки новой конфигурации. В сообщении, отправленном на этапе S803, может быть предоставлен код, указывающий на то, что данные, переданные на этапе S801, были приняты и обработаны. Альтернативно, на этапе S804 может быть передано сообщение, указывающее на то, доступна ли для загрузки телематическим устройством 101 новая конфигурация, и что данные о событии, переданные на этапе S801, не смогли быть обработаны.
SDP 106 может агрегировать данные нескольких телематических устройств (включая телематическое устройство 101) и производить статистический анализ агрегированных данных перед их передачей поставщику 107 услуг. Статистический анализ, производимый SDP 106, может включать агрегацию данных, схожую с агрегацией, описанной выше в отношении трех примеров матриц (т.е. матрицы скоростей, экологической матрицы характера вождения и матрицы риска). Одной из отличительных особенностей статистического анализа, производимого на SDP 106, может быть то, что анализ может покрывать большой промежуток времени, например, неделю. Например, семь матриц риска могут быть переданы платформе SDP 106 от телематического устройства 101 в течение недели. В конце недели SDP 106 агрегирует семь матриц в одну матрицу (возможно путем суммирования соответствующих значений) и затем передает результаты поставщику 107 услуг.
SDP 106 может хранить экологические матрицы и матрицы скоростей и риска. На практике матрицы могут быть разреженными, так как некоторые водители не ездят рано утром, и матричные элементы, соответствующие этому временному интервалу, могут быть все равны 0. Также количество нарушений ограничения скорости, например 100 км/ч в центре города, является редким. Целесообразно сжимать матрицы в формате CRS (Compressed Row Storage) для разреженных матриц или в формате Harwell-Boeing (НВ-формате) перед их сохранением, и, возможно, перед передачей матриц от телематического устройства 101 платформе SDP 106. Таким образом, можно уменьшить нагрузку на канал передачи данных при передаче матриц путем их сжатия (например, удаления или уменьшения матричных элементов со значением 0) или не передавая матрицы, когда все матричные элементы равны 0.
Экологическая матрица, матрицы скоростей и риска могут быть переданы телематическим устройством 101 платформе SDP 106 в формате XML. Для минимизации количества передаваемых данных и, тем самым, минимизации затрат на передачу данных, матричные данные могут быть переданы в формате «XML list». Например, экологическая матрица Λ из примера выше размером 3 строки на 9 столбцов может быть представлена, как показано в таблице 5.
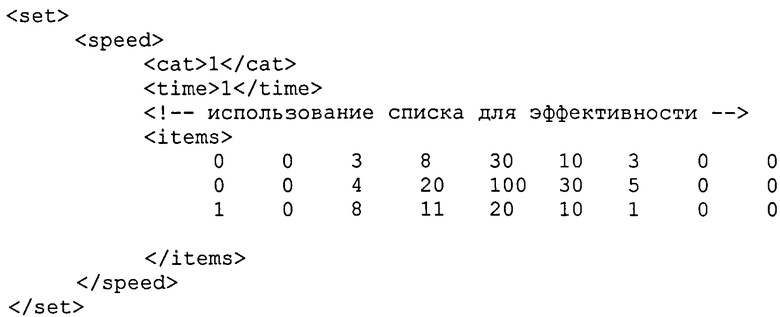
Таблица 5
В конкретном примере могут быть использованы бинарный XML-формат и/или утилита сжатия (например, gzip). В некоторых вариантах осуществления изобретения также можно использовать WBXML, возможно в комбинации с утилитой сжатия. На практике можно добиться 20%-сжатия с помощью WBXML и 40-50%-сжатия с помощью утилиты сжатия. Также в качестве альтернативы возможно использование ASN.1 вместо XML. Несмотря на то, что использование утилиты сжатия может быть особенно эффективным для уменьшения количества передаваемых данных, возможны соображения относительно производительности в свете требований для сжатия и распаковки данных на телематическом устройстве 101.
Экологическая матрица, матрицы скоростей и риска могут быть переданы индивидуально или будучи объединенными в многомерной матрице, например, в трехмерной матрице. В частности, трехмерная матрица может содержать семь суточных временных интервалов с двухмерной матрицей для каждого временного интервала. Соответственно, согласно примеру трехмерная матрица будет содержать семь двухмерных матриц. Возможны также другие комбинации. Например, четырехмерная матрица может содержать несколько трехмерных матриц, каждая из которых может относиться к определенной категории дороги. Согласно этому же примеру четырехмерная матрица может содержать два матричных элемента, одни для дорог в городской местности, а другой для загородных дорог. Каждый матричный элемент может содержать множество трехмерных матриц.
В соответствии с вышесказанным, матрицы могут также быть интерпретированы как один элемент или списки элементов, обобщающих обработанные спутниковые данные, где каждый элемент в списке представляет пройденное расстояние (например, количество километров) при определенных обстоятельствах перемещения (например, ограничении скорости или скорости движения). Матрицы могут быть реализованы различными способами на телематическом устройстве 101. Например, могут быть использованы: двухмерный массив, массив из элементов типа «Struct» (также известных как записи) или массив объектов. Возможна также реализация на основе указателей. Элементы типа «Struct», объекты и указатели можно понимать, как элементы, относящиеся к языку программирования C++. Также возможно осуществление посредством других языков программирования.
Фиг.9 иллюстрирует отображение данных, которые могут быть переданы от SDP 106 поставщику 107 услуг. Указанные данные могли быть получены от множества телематических устройств, возможно включая телематическое устройство 101. Данные могут содержать: данные 901 нарушения ограничения скорости, данные 902 экологичности характера вождения и данные 903 фактора риска вождения. Данные 901 нарушения ограничения скорости могут содержать накопленные незначительные нарушения ограничения скорости или «soft facts», которые могут быть измерены в виде процентов. Кроме этого, данные 901 нарушения ограничения скорости могут содержать значительные нарушения ограничения скорости или «hard facts», которые могут быть предоставлены индивидуально. Измерения данных 902 экологичности характера вождения могут предоставлять запись предопределенных событий. Например, случаи большого ускорения могут быть записаны, вместе с периодами, когда транспортное средство 102 находится в зоне охраняемой окружающей среды. Данные 903 фактора риска вождения могут содержать данные, записанные при вождении в области с повышенной вероятностью происшествий или в такое время (например, ночью).
Фиг.10 графически иллюстрирует возможную выгоду от использования телематического устройства 101.
Согласно исследованиям, превышение рекомендуемой скорости на дорогах, на которых не установлено ограничение скорости, является распространенным фактом среди водителей. Также, в частности, для молодых водителей особенно высока вероятность несчастных случаев при дорожных происшествиях. Эти и другие факторы влияют на повышение стоимости возмещения убытков и уменьшение страховых премий на рынках услуг автострахования.
Кроме этого, в некоторых случаях предполагается, что трудно отличить политику автострахования определенной компании от политики автострахования конкурирующих компаний, когда каждая из компаний юридически обязана предложить услуги автострахования любому обратившемуся за этим человеку. Как результат, компаниям, оказывающим услуги автострахования, приходиться бороться с высокой текучестью клиентов и большой чувствительностью клиентов к ценам. Кроме того, связанные с ущербом и фактором риска цены для индивидуальных клиентов могут быть непрозрачными. Страховые взносы могут рассчитываться на основе характеристик сегмента потребителей. Данные проблемы могут ограничивать потенциальный рост рынка услуг автострахования и создают необходимость в более тщательном определении характера вождения.
Фиг.11, 12 и 13 иллюстрируют различные аспекты отображения данных скорости. Подобным образом, с соответствующими настройками и подробным представлением, возможно отображение экологичности характера вождения, риска категории дороги и риска, относящегося ко времени суток вождения транспортного средства 102.
Фиг.11 иллюстрирует пример отображения на дисплее 120 GUI телематического устройства 101, на котором показана скорость. Дисплей 120 скорости содержит индикатор 122 ограничения скорости на белом фоне 124. Белый фон 124 индикатора 122 ограничения скорости можно понимать как то, что транспортное средство 102 перемещается на скорости в пределах ограничения, соответствующего местоположению транспортного средства 102. Индикатор 126 скорости показывает, что скорость транспортного средства 102 составляет 48 км/ч. Элемент 127 ввода ошибки управления позволяет пользователю 108 записывать нарушения (например, нарушения ограничения скорости), которые не были сообщены телематическим устройством 101. Индикатор 128 GPS-статуса указывает на состояние сигнала спутника 104. Например, если телематическое устройство 101 в данный момент принимает сигнал от спутника 104, индикатор 128 указывает «Статус ok». Если телематическое устройство в данные момент не принимает сигнала от спутника 104, индикатор 128 может указать «Нет сигнала». Элемент 130 ввода настроек может быть использован для отображения на телематическом устройстве 101 дисплея с настройками, например, такого, как дисплей 180 настроек на фиг.14. Элемент 132 ввода Х может быть использован для того, чтобы закрыть GUI и приложение анализа вождения на телематическом устройстве 101. Нажатие на элемент 132 может остановить выполнение функций анализа вождения на телематическом устройстве 101, как описано в настоящей заявке.
Фиг.12 иллюстрирует пример отображения на дисплее 140 GUI телематического устройства 101, на котором показано предупреждение. Дисплей 140 предупреждения можно понимать, как разновидность дисплея 120 скорости. На дисплее 140 предупреждения индикатор 142 ограничения скорости показан на желтом фоне 144. Желтый фон 144 можно понимать как то, что скорость транспортного средства 102 превышает ограничение скорости, соответствующее местоположению транспортного средства 102. Однако в примере дисплея 140 предупреждения скорость транспортного средства 102 находится в пределах предустановленного допуска в 5 км/ч. Предустановленный допуск можно изменять в соответствии с описанием фиг.14. Индикатор 146 скорости показывает, что скорость транспортного средства 102 составляет 51 км/ч. Индикатор 142 ограничения скорости указывает, что ограничение скорости, соответствующее местоположению транспортного средства 102, составляет 50 км/ч. Аналогично дисплею 120 скорости дисплей 140 предупреждения содержит элемент 127 ввода ошибки управления, индикатор 148 GPS-статуса и элемент 130 ввода настроек. Дисплей 140 также содержит элемент 132 ввода X.
Фиг.13 иллюстрирует пример отображения на дисплее 160 GUI телематического устройства 101, на котором показана тревога. Дисплей 160 тревоги можно понимать как разновидность дисплея 120 скорости. На дисплее 160 тревоги индикатор 162 ограничения скорости показан на красном фоне 164. Красный фон 164 можно понимать как то, что скорость транспортного средства 102 превышает ограничение скорости, соответствующее местоположению транспортного средства 102, и то, что скорость находится вне предустановленного допуска в 5 км/ч. Как указано в отношении фиг.14, 5 км/ч является примером предустановленного допуска, и его можно изменять. Дополнительно к красному фону 162 телематическое устройство 101 может подавать звуковой отклик 103, указывающий на то, что обнаружена скорость за пределами предустановленного допуска. Звуковой отклик 103 может представлять собой аудио сигнал, подобный гудку. Более того, звуковой отклик может указывать на неблагоприятные последствия для пользователя 108, такие как повышенный страховой взнос или административный штраф.
Индикатор 166 скорости показывает, что скорость транспортного средства 102 составляет 56 км/ч. Индикатор 162 ограничения скорости показывает, что ограничение скорости, соответствующее местоположению транспортного средства 102, составляет 50 км/ч. Аналогично дисплею 120 скорости и дисплею 140 предупреждения дисплей 160 тревоги содержит элемент 127 ввода поправки ошибки, индикатор 168 GPS-статуса, элемент 130 ввода настроек и элемент 132 ввода X.
Фиг.14 иллюстрирует пример отображения на дисплее 180 GUI телематического устройства, на котором показаны настройки. Дисплей 180 настроек может быть показан после того, как пользователь 108 кликает (или нажимает) на элемент 130 ввода настроек. Дисплей 180 настроек содержит три столбца и может быть использован для регулировки допуска по времени и по скорости до того, как будет показан дисплей 160 тревоги. В соответствии с фиг.16 вместе с дисплеем тревоги может быть подан звуковой отклик 103.
Крайний левый столбец дисплея 180 настроек показывает список скоростей в порядке их уменьшения, каждая запись соответствует ограничению скорости, связанному с местоположением транспортного средства 102. Следующие два столбца содержат шапки «сек» и «км/ч». Стрелки по обе стороны записей в столбцах «сек» и «км/ч» позволяют увеличивать или уменьшать указанные записи. Запись в столбце «сек» относится к допуску по времени в секундах, т.е. числу секунд, в течение которых нарушение наблюдается перед тем, как будет показан дисплей 160 тревоги. Записи в столбце «км/ч» относятся к допуску по скорости, т.е. числу км/ч, на которое должно быть превышено ограничение скорости перед тем, как будет показан дисплей 160 тревоги. Допуск по времени в секундах и по скорости можно вместе назвать значениями допуска. Чтобы изменения значений допуска подействовали, возможно, необходима перезагрузка приложения анализа вождения. Элемент 184 ввода отмены может быть использован для возвращения к дисплею 120 скорости без сохранения каких-либо изменений значений допуска. Элемент 186 ввода сохранения может быть использован для сохранения изменений значений допуска и возвращения к дисплею 120 скорости.
Согласно примеру строка 182 показывает, что если ограничение скорости составляет 80 км/ч, транспортное средство 102 должно превысить ограничение скорости, по меньшей мере, на 5 км/ч в течение, по меньшей мере, 5 секунд перед тем, как будет показан дисплей 160 тревоги. Соответственно, если транспортное средство 102 превышает ограничение скорости в течение менее 5 секунд или менее чем на 5 км/ч, будет показан дисплей 140 предупреждения.
Дополнительно, может быть предоставлен элемент 183 ввода передачи данных (например, в виде окошка для метки, известного как «checkbox»). Элемент 183 ввода передачи данных может позволить пользователю 108 выбрать, передавать ли данные от телематического устройства 101 платформе SDP 106.
Фиг.15 иллюстрирует пример дисплея 220 с подробными данными скорости. Дополнительно к элементам дисплея 120 скорости, дисплей 220 содержит индикатор 222 города и индикатор 224 ограничения. Индикатор 222 города указывает на то, находится ли транспортное средство 102 в городской местности. Индикатор 224 ограничения указывает ограничение скорости, соответствующее местоположению транспортного средства 102. Индикатор 225 FC (Function Class) может относиться к категории дороги, соответствующей местоположению транспортного средства 102.
Фиг.16 иллюстрирует пример дисплея 240 с подробными настройками. Дополнительно к элементам дисплея 180 настроек, дисплей 240 содержит элемент 242 ввода подробных данных (например, в виде «checkbox»), который позволяет пользователю выбрать, отображать или нет подробные данные, как показано на фиг.15 и 17. Аналогично элементу 183 ввода передачи данных на фиг.14, элемент 243 ввода передачи данных может позволить выбрать пользователю 108, передавать или нет данные от телематического устройства 101 платформе SDP 106.
Фиг.17 иллюстрирует пример дисплея 260 с подробным отображением тревоги. Дополнительно к элементам дисплея 160 тревоги, дисплей 260 содержит индикатор 262 города, индикатор 264 штрафа, индикатор 266 наказания, индикатор 268 нарушения и индикатор 270 очков. Аналогично дисплею 160 тревоги, вместе с дисплеем 260 может подаваться звуковой отклик 103. Индикатор 262 города указывает, находится ли транспортное средство 102 в городской местности. Индикатор 264 штрафа показывает административный штраф, соответствующий нарушению, указанному индикатором 268 нарушения. Согласно примеру на фиг.17, нарушение заключается в том, что транспортное средство 102 превысило ограничение скорости 50 км/ч, двигаясь со скоростью 81 км/ч, т.е. транспортное средство 102 превысило ограничение скорости на 31 км/ч. Административный штраф можно понимать, как штраф, предписанный законом за нарушение. Индикатор 266 наказания показывает дополнительное наказание, которое может быть назначено за нарушение. В конкретном примере на фиг.17 индикатор 264 штрафа указывает, что нарушение влечет за собой штраф в 160 евро, а индикатор 266 наказания указывает, что нарушение влечет за собой лишение пользователя 108 водительских прав сроком на 1 месяц. Кроме этого, индикатор 270 очков указывает, что нарушение влечет за собой запись 3 очков в водительские права пользователя 108. Телематическое устройство 101 может также быть выполнено с возможностью отображения таблицы штрафов и наказаний, соответствующих нарушениям в зависимости от местоположения.
Интерфейс GUI телематического устройства 101 может также быть выполнен с возможностью отображения индекса или сводной информации, аналогично информации показанной на фиг.9.
Изобретение относится к способу и устройству для обеспечения конфиденциальности пользователя и применимости данных, сообщаемых серверу устройством транспортного средства. Техническим результатом является снижение вычислительной нагрузки на устройство на транспортном средстве за счет реализации представленной структуры данных, содержащих информацию об обстоятельствах движения и пройденного расстояния, сообщаемых к серверу. Способ содержит этапы: перемещения устройства в течение промежутка времени; приема данных устройством в течение промежутка времени; обработки принятых данных с помощью устройства; сведения обработанных данных с помощью устройства в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения устройства, и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое устройством в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и передачу сведенных данных от устройства к серверу. 3 н. и 11 з.п. ф-лы, 5 табл., 17 ил.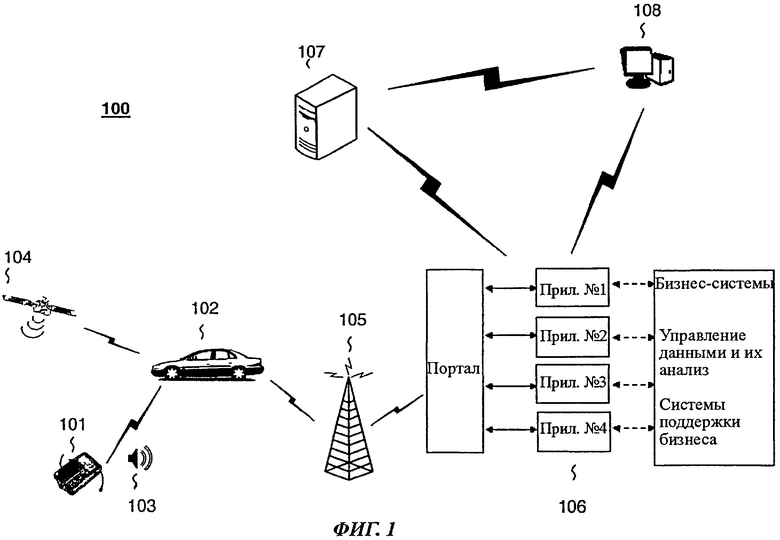
1. Способ обеспечения конфиденциальности пользователя (108) и применимости данных, сообщаемых серверу (106) устройством (101), таким как транспортное телематическое устройство, реализуемый с использованием компьютера, который включает:
перемещение устройства (101) в течение промежутка времени;
прием данных устройством (101) в течение промежутка времени;
обработку принятых данных с помощью устройства (101);
сведéние обработанных данных с помощью устройства (101) в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения устройства (101), и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое устройством (101) в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и
передачу сведенных данных от устройства (101) к серверу (106).
2. Способ по п.1, отличающийся тем, что обработанные данные содержат по меньшей мере одни из следующих данных: данные местоположения, данные скорости и данные времени; причем данные скорости указывают величину скорости, с которой перемещалось устройство (101), при этом способ дополнительно включает:
корреляцию данных местоположения и/или данных скорости и/или данных времени с картографической информацией, сохраненной на устройстве (101);
определение, с помощью устройства (101) и на основании корреляции, что пользователь совершил действие с соответствующими последствиями; и
генерацию устройством (101) сигнала тревоги в ответ на действие.
3. Способ по п.2, отличающийся тем, что включает:
шифрование, перед передачей, сведенных данных, причем сведенные данные могут быть дешифрованы сервером (106) без помощи пользователя;
шифрование, перед передачей, обработанных данных, соответствующих действию, причем обработанные данные могут быть дешифрованы только ключом пользователя;
передачу зашифрованных обработанных данных от устройства (101) к серверу (106).
4. Способ по любому из предшествующих пунктов, отличающийся тем, что предопределенные обстоятельства перемещения включают одно или несколько из следующих:
диапазон скорости, с которой устройство (101) покрыло расстояние;
значение ускорения, с которым устройство (101) покрыло расстояние;
ограничение скорости, соответствующее по меньшей мере одному местоположению в пределах покрытого устройством (101) расстояния;
категория дороги, соответствующая по меньшей мере одному местоположению, пройденному устройством (101).
5. Способ по п.2 или 3, отличающийся тем, что картографическая информация содержит набор координат карты, причем корреляция данных местоположения и данных скорости включает корреляцию данных местоположения и данных скорости с категорией дороги и/или ограничением скорости, связанными с набором координат карты.
6. Способ по п.2 или 3, отличающийся тем, что действие содержит одно или несколько из следующих:
превышение ограничения скорости;
превышение предопределенного значения ускорения;
приближение к местоположению, которое представляет собой риск для пользователя, или нахождение в указанном местоположении.
7. Способ по п.2 или 3, отличающийся тем, что устройство (101) не отображает картографическую информацию.
8. Способ по любому из пп.1-3, отличающийся тем, что по меньшей мере один матричный элемент Eij состоит из множества компонентов, при этом каждый компонент 


9. Способ по любому из пп.1-3, отличающийся тем, что устройство (101) встроено в транспортное средство (102), а способ дополнительно включает компенсацию пользователю благодаря тому, что устройство (101) встроено в транспортное средство (102).
10. Способ по любому из пп.1-3, отличающийся тем, что матрица используется для вычисления указания на характер вождения.
11. Способ по любому из пп.1-3, отличающийся тем, что дополнительно включает:
агрегацию переданных данных с данными от по меньшей мере одного другого устройства (101) на сервере (106);
генерацию статистических данных на основании агрегированных данных на сервере (106); и предпочтительно включает
обеспечение WEB-портала, при этом пользователь может получить доступ к статистическим данным и/или сведенным данным пользователя посредством WEB-портала.
12. Устройство (101), такое как транспортное телематическое устройство (101), содержащее
приемник, выполненный с возможностью приема данных в течение промежутка времени, причем принятые данные указывают на то, что устройство (101) перемещалось в течение промежутка времени;
процессор, выполненный с возможностью обработки принятых данных и сведения обработанных данных в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения устройства (101), и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое устройством (101) в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и
передатчик, выполненный с возможностью передачи сведенных данных в сервер (106).
13. Устройство (101) по п.12, отличающееся тем, что физически встроено в транспортное средство (102), причем устройство (101) использует для связи интерфейс транспортного средства.
14. Мобильное устройство (101), такое как мобильный телефон (101), содержащее
приемник, выполненный с возможностью приема данных в течение промежутка времени, причем принятые данные указывают на то, что мобильное устройство (101) перемещалось в течение промежутка времени;
процессор, выполненный с возможностью обработки принятых данных и сведения обработанных данных в матрицу, причем строки и столбцы матрицы определяют обстоятельства перемещения мобильного устройства (101), и матрица содержит множество матричных элементов, причем каждый матричный элемент включает расстояние, покрытое мобильным устройством (101) в течение промежутка времени при паре указанных предопределенных обстоятельств перемещения; и
передатчик, выполненный с возможностью передачи сведенных данных в сервер (106).
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |

