ОБЛАСТЬ ТЕХНИКИ
Варианты осуществления настоящего изобретения относятся к оценке состояния системы кровообращения субъекта.
УРОВЕНЬ ТЕХНИКИ
Реакция системы кровообращения субъекта на изменение его положения может зависеть от характеристик крови, например ее вязкости, характеристик системы кровообращения, например ее сопротивления, и от того, как автономная нервная система способна поддерживать гомеостазис.
Кровоток на периферии может, например, зависеть от одного из или от комбинации следующих факторов:
1. сосудистые заболевания, например болезнь Рейно
2. проблемы, обусловленные генетикой, например склеродермия
3. аномальная реакция автономной нервной системы в виде сужения или расширения сосудов, обусловленная, например, диабетической невропатией или алкоголизмом
4. принятие лекарств, например бета-блокираторов
5. заболевания аутоиммунной системы, например волчанка Поэтому очевидно, что существует множество причин «аномальности» реакции системы кровообращения субъекта на изменение его положения. Различные патологии могут оказывать на кровообращение одинаковое или различное влияние.
Желательно создать промежуточный клинический индикатор, который анализирует реакцию системы кровообращения на ряд изменений положения тела и обеспечивает врача информацией, которая в комбинации с другой информацией, а также опытом и знаниями врача позволяет определить наличие патологии. Затем врач с использованием своих собственных медицинских знаний проводит независимые исследования для идентификации патологии.
КРАТКОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Согласно различным, но не обязательно всем, вариантам осуществления настоящего изобретения, предложены способы, системы, устройства и компьютерные программы, как сформулировано в пунктах формулы изобретения.
Согласно различным, но не обязательно всем, вариантам осуществления настоящего изобретения, предложена система и способ для оценки системы кровообращения субъекта с использованием оптических датчиков и многократного изменения положения тела субъекта.
Это обеспечивает дешевую, быструю, безболезненную оценку физиологии субъекта путем анализа нарушений системы кровообращения.
Очевидно, что настоящее изобретение не обеспечивает диагностику болезни, но обеспечивает предварительный клинический индикатор, который в чем-то сходен с температурой тела, давлением крови, частотой сердечных сокращений и т.п.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания различных примеров осуществления настоящего изобретения ниже даны ссылки на сопровождающие чертежи, где:
на фиг.1 схематично показана система, содержащая оптические датчики и устройство;
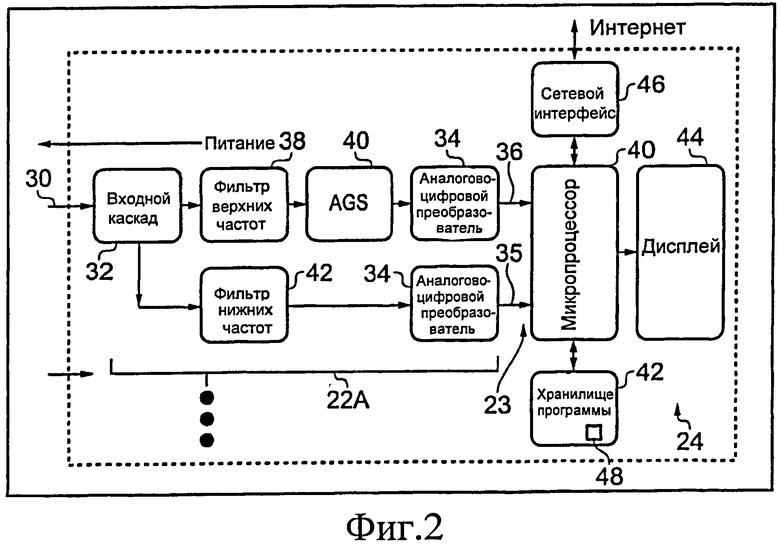
на фиг.2 более подробно показано упомянутое устройство;
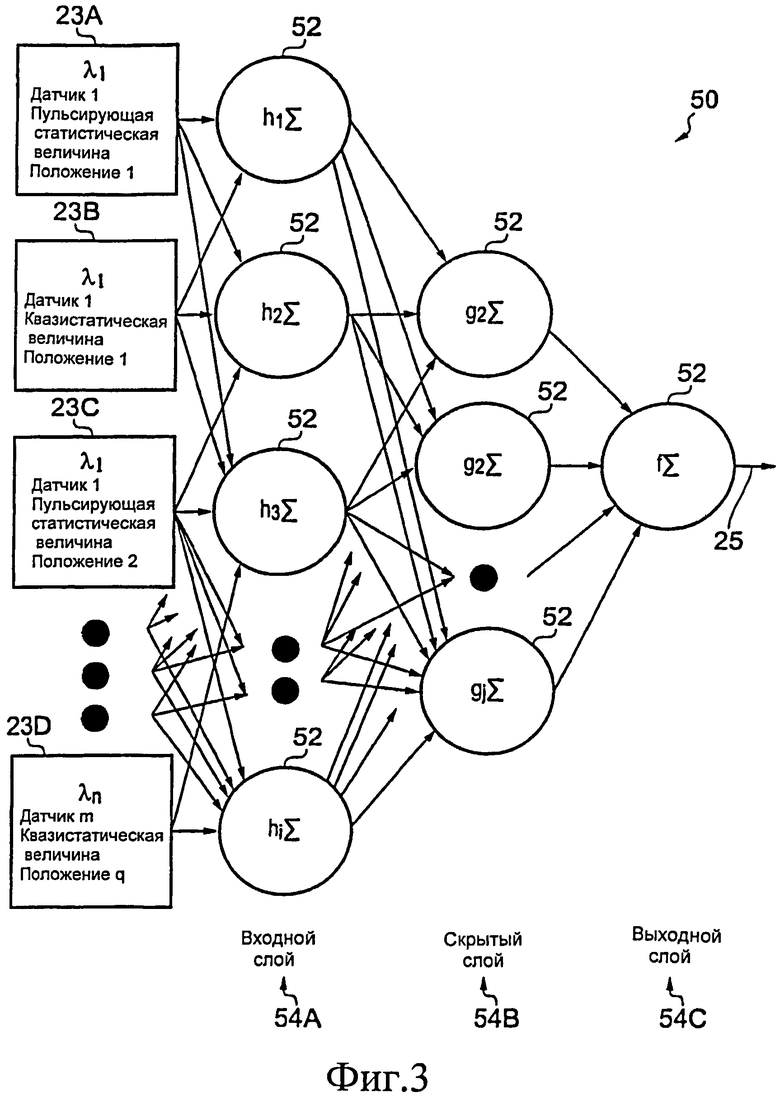
на фиг.3 схематично показана искусственная нейронная сеть для создания метрики;
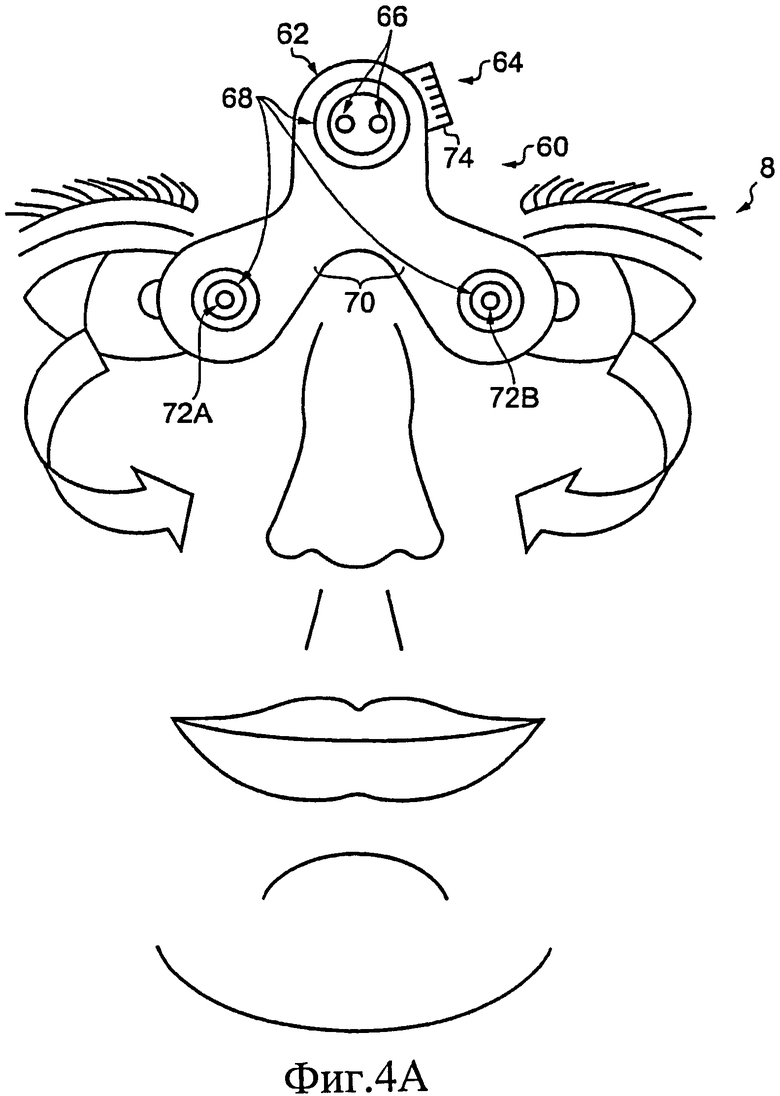
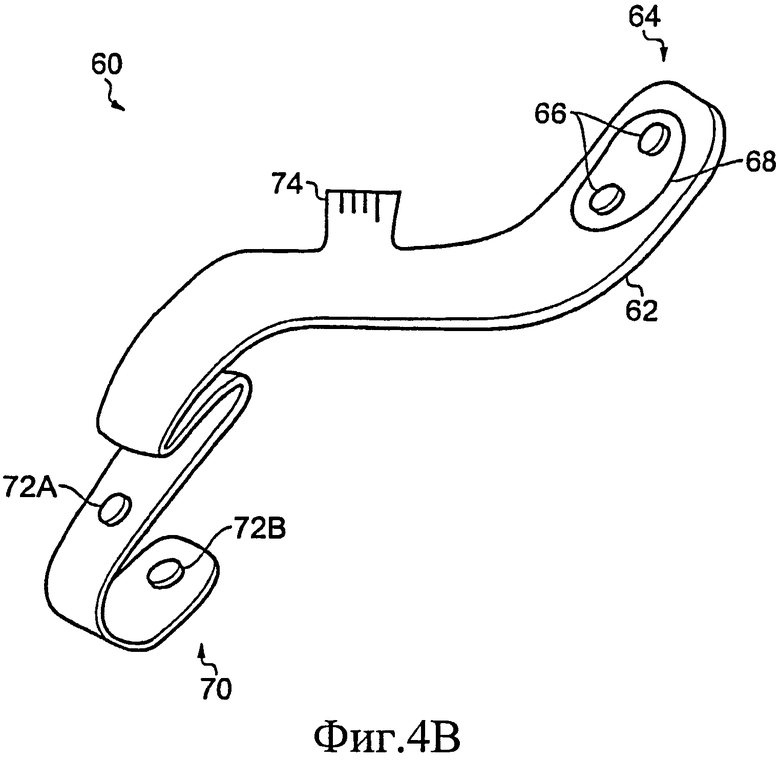
на фиг.4А и 4В показаны различные реализации гибкой подложки для датчиков;
на фиг.5А, 5В и 5С схематично показаны элементы обеспечения безопасности в гибкой подложке.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Для провоцирования изменений в системе кровообращения субъекта используются функциональные тесты. Функциональные тесты включают помещение субъекта в различные положения и запись данных для этого положения. Точное количество, тип, порядок, частота смены положений, используемые в конкретном протоколе функционального теста, заранее заданы и зависят от физиологии субъекта и исследуемой патологии.
Кинематический протокол (или тест) представляет собой последовательность из трех и более различных положений. Обычно эта последовательность проводится в виде одной непрерывной сессии. Эта последовательность может быть в виде непрерывного перемещения, при котором между изменениями положения нет перерывов.
Различные положения, принимаемые в процессе выполнения кинематического протокола, могут включать, например, по меньшей мере три из следующих положений: основное положение; ни одного, одно или большее количество «местных» (или «конечностных») движений; ни одного, одно или большее количество «ортостатических» (или «корпусных») положений; ни одного, одно или большее количество «системных» (или «соматических») положений.
В «местном» («конечностном») положении конечность перемещают в гравитационном поле относительно неподвижного корпуса.
В «ортостатическом» (или «корпусном») положении корпус перемещают в гравитационном поле относительно неподвижной конечности или конечностей (например, ног).
В «систематическом» (или «соматическом») положении все тело перемещают в гравитационном поле без относительного перемещения корпуса относительно конечностей. Это может быть достигнуто путем наклона неподвижного субъекта.
Указанные по меньшей мере три различных положения дают по меньшей мере два различных изменения положения. Изменение положения - это изменение положения всего тела или его частей в гравитационном поле. Поэтому различные изменения положения приводят к появлению различных «импульсов» в системе кровообращения субъекта.
Может возникнуть необходимость получения первого типа импульса, например «местного» (или «конечностного») импульса, путем перемещения в «местное» (или «конечностное») положение, или « ортостатического» (или «корпусного») импульса путем перемещения в «ортостатическое» (или «корпусное») положение, или «системного» (или «соматического») импульса путем перемещения в «системное» (или «соматическое») положение. Кроме того, может быть желательно иметь другой второй тип импульса. Поэтому, если первым типом импульса был «местный» (или «конечностный»), второй тип импульса может быть «ортостатическим» (или «корпусным») или «системным» (или «соматическим»), но не «местным» (или «конечностным»).
Приведенный ниже кинематический протокол может использоваться для оценки местной реакции капиллярного русла, т.е. расширения и сужения сосудов. За местным изменением положения следует системное изменение положения.
Выполняют первое местное изменение положения. За исходным основным положением, при котором субъект лежит на спине и его руки находятся на уровне сердца, может следовать местное положение, при котором субъект лежит на спине, а его руки направлены вертикально вниз и находятся ниже сердца.
Затем выполняют системное изменение положения. За исходным основным положением, при котором субъект лежит на спине и его руки находятся на уровни сердца, может следовать системное положение, при котором угол наклона тела изменен без независимого перемещения рук относительно корпуса, в результате чего голова находится выше сердца.
Датчик может находиться на указательном пальце руки. Этот датчик может быть датчиком оптического пропускания, который чувствителен к объему крови, циркулирующей в артерии.
Датчик может быть расположен на предплечье или на тыльной стороне руки. Этот датчик может быть датчиком оптического отражения, который чувствителен к изменению объема крови, циркулирующего в подкожных венах. Датчик отражения позволяет также нормировать датчик на пальце сигналами, обусловленными изменением объема крови, циркулирующей в венах.
Выходные сигналы датчиков имеют такие характеристики, которые обеспечивают различные паттерны в рамках применяемого кинематического протокола. Паттерн для реакции при нормальной циркуляции крови представляет собой обычный характерный паттерн. Этот характерный паттерн может быть найден теоретически или эмпирически, а затем использован для сравнения с выходными сигналами датчиков для субъекта в процессе такого же кинематического теста. Можно вывести метрику, которая указывает степень совпадения паттернов. Совпадение паттернов указывает на нормальную реакцию кровообращения для данного кинематического теста. Несовпадение паттернов указывает на аномальную реакцию кровообращения, которая требует дополнительных исследований.
Ниже описан кинематический протокол, который может быть использован для оценки артериального давления крови, питающей мозг. После ортостатического (или корпусного) изменения положения следует системное изменение положения.
Вначале выполняют ортостатическое (или корпусное) изменение положения. Первоначально субъект лежит на спине для записи исходных показателей. Затем субъект садится сам или его сажают в ортостатическое (или корпусное) положение, в котором приток крови к мозгу уменьшается из-за изменения ортостатического давления.
Затем выполняют системное изменение положения. Субъект возвращается в основное положение на спине для записи исходных показателей. Субъекта, находящегося в положении на спине наклоняют, меняя угол наклона тела так, чтобы голова перемещалась вертикально вниз ниже положения сердца.
Датчик может быть установлен на лбу субъекта. Этот датчик может быть датчиком оптического отражения, который чувствителен к локальному объему венозной крови, обусловленному ее приливом.
Датчик может быть установлен на носу. Этот датчик может быть датчиком оптического пропускания, который чувствителен к объему артериальной крови, зависящему от циркуляции во внутренней сонной артерии через глазную и решетчатую артерии.
Датчик может быть установлен на мочке уха. Этот датчик может быть датчиком оптического пропускания, который чувствителен к объему артериальной крови, зависящему от циркуляции во внешней сонной артерии через височную артерию.
Во избежание ортостатической компенсации эти датчики предпочтительно должны находиться на одинаковой высоте.
Выходные сигналы датчиков имеют такие характеристики, которые обеспечивают различные паттерны в рамках применяемого кинематического протокола. Паттерн для нормальной реакции кровообращения представляет собой обычный характерный паттерн. Этот характерный паттерн может быть найден теоретически или эмпирически, а затем использован для сравнения с выходными сигналами датчиков для субъекта в процессе такого же кинематического теста. Можно вывести метрику, которая указывает степень совпадения паттернов. Совпадение паттернов указывает на нормальную реакцию кровообращения для данного кинематического теста. Несовпадение паттернов указывает на аномальную реакцию кровообращения, которая требует дополнительных исследований, например получения изображений методом ядерного магнитного резонанса (MRI, Magnetic Resonance Imaging), если подозревается аномальное снабжение кровью головного мозга.
На фиг.1 схематично показана система 10, включающая оптические датчики 2А, 2В, 2С и устройство 20.
Датчики 2А, 2В и 2С расположены в соответствующих местах 4А, 4В, 4С на теле субъекта. В показанном примере датчики 2А и 2В прикреплены к подложке 6, а подложка 6 прикреплена к телу 8 субъекта.
Датчики являются неинвазивными, типично фотодатчиками, например датчиками оптического пропускания и/или датчиками оптического отражения. Эти датчики предназначены для измерения физиологических параметров, например колебания объема органа (плетизмография). Оптический датчик содержит излучатель света и фотодетектор. В датчике оптического пропускания при работе фотодетектор расположен так, что принимает свет от излучателя света после того, как этот свет прошел через тело 8 субъекта. В датчике оптического отражения при работе фотодетектор расположен так, что принимает свет от излучателя света после того, как этот свет отразился от тела 8 субъекта.
Следует отметить, что датчики 2А, 2В подают сигналы на вход устройства 20 в процессе всего кинематического протокола, то есть для каждого положения субъекта.
Хотя в каждом месте показан один датчик, очевидно, что в каждом месте может быть установлено множество датчиков. Например, в одном и том же месте может быть установлена комбинация из датчика отражения и датчика пропускания. Кроме того, в одном и том же месте могут быть установлены датчики, которые работают на разных длинах световых волн. На датчик, работающий в ближней инфракрасной области около 850 нм, слабо влияет поглощение в тканях, но сильно влияет поглощение кровью, поэтому такой датчик можно использовать для мониторинга реакции капиллярного русла в процессе кинематического теста. С другой стороны, на датчик, работающий вблизи 650 нм, сильно влияет поглощение в тканях, и поэтому такой датчик можно использовать для мониторинга реакции тонуса кожи в процессе кинематического теста. Сигнал датчика на 850 нм содержит намного больше артериальной составляющей, чем датчик на 650 нм, поскольку он глубже «проникает» в ткани.
Указанные датчики осуществляют связь с устройством 20 либо беспроводными способами (в стандартах ZigBee, Bluetooth, на ультравысокой частоте и т.п.) или с помощью кабелей.
Устройство 20 включает входной интерфейс 22, который производит предварительную обработку сигналов, поступающих от датчиков 2А, 2С, и предоставляет сигнал 23 в обрабатывающую схему 24. Обрабатывающая схема 23 сконфигурирована для определения и выведения метрики 25 путем объединения предоставляемых сигналов 23 согласно заранее заданным калибровочным данным 28.
В показанном примере предоставляемые сигналы 23 зависят от наличия крови в первом, втором и третьем местах 4А, 4В, 4С, когда субъект переводится в различные положения согласно кинематическому протоколу.
Интерфейс 22 также может производить некоторую обработку сигнала перед тем, как подать сигналы 23 в обрабатывающую схему 24.
Например, интерфейс может разделить сигнал интенсивности от датчика на два различных сигнала с различными частотными компонентами. Например, он может вырабатывать «сигнал переменного тока», который относится к изменению интенсивности во времени, записанному некоторым датчиком, и «сигналу постоянного тока», который соответствует квазистатической интенсивности, зафиксированной этим датчиком.
В еще одном примере перед подачей сигналов в обрабатывающую схему 24 интерфейс 22 может применять к сигналам 23 некоторую нелинейную функцию, например логарифмическую функцию.
Обрабатывающая схема 24 может быть выполнена любым подходящим образом. Например, она может представлять собой программируемый компьютер или специальное аппаратное средство. Интерфейс 22 может быть выполнен любым подходящим образом. Например, он может представлять собой программируемый компьютер или специальное аппаратное средство.
Следует отметить, что интерфейс 22 и обрабатывающая схема не обязательно представляют собой дискретные физические компоненты, и могут быть выполнены в виде функциональных модулей, используемых общей схемой, например процессором, выполняющим различные программные модули.
Калибровочные данные 28 используют для определения расхождения предоставляемых сигналов 23 от ожидаемого паттерна сигналов, который характеризует ожидаемую реакцию нормальной системы кровообращения на кинематический протокол. Ожидаемая реакция может представлять собой усредненную статистическую модель ожидаемых сигналов, созданную, например, с использованием машинного самообучения.
Калибровочные данные определяют нелинейную комбинацию сигналов. Типично имеются различные нелинейные комбинации сигналов 23, необходимые для различных кинематических тестов, поскольку любой сравниваемый паттерн меняется от местоположения и типа используемых датчиков и от проводимого кинематического теста. Поэтому для каждого кинематического теста имеются различные калибровочные данные 28.
На фиг.2 интерфейс 22 включает компоненты (22А и т.д.) интерфейса для одного из датчиков 2А, однако показан только компонент 22А интерфейса для датчика 2А. Очевидно, что компоненты интерфейса эквивалентны.
Компонент 22А интерфейса включает аналоговую входную схему 32 обработки сигнала, предназначенную для обработки интенсивности сигнала, принятого из датчика 2А, и по меньшей мере один аналогово-цифровой преобразователь 34.
Может иметься множество входов, предназначенных для одновременного непрерывного мониторинга множества датчиков, или один вход с соответствующим мультиплексорным переключателем. Входная схема позволяет обеспечить постоянное управление током, поступающим в датчики, трансимпедансным усилением принятых сигналов 30, компенсацией внешних световых помех. Это может быть сделано с использованием мультиплексирования с временным разделением (TDM, time division multiplexing), при котором периоды, когда источник света не излучает, позволяют осуществлять мониторинг помех, обусловленных световым фоном. Альтернативно, это может быть сделано с использованием мультиплексирования с частотным разделением, применяемым путем использования модулированного источника света и системы синхронного детектирования или демодуляции.
Входная схема 32 может запустить датчики с помощью самонастройки на некоторое среднее значение компонента полустатического сигнала путем такого варьирования интенсивности светодиода, чтобы результирующий сигнал был посередине внутри желательного диапазона, например единичного. Любое уменьшение или увеличение сигнала будет подстроено так, чтобы сигнал оставался внутри указанного диапазона сигналов, что снижает вероятность чрезмерного насыщения или уменьшения сигнала.
В рассматриваемом примере компонент 22А интерфейса разделяет полученный сигнал 30 после преобразования на два индивидуальных сигнала 35, 36, имеющих различные частотные компоненты.
Может быть сформирован сигнал 36 переменного тока путем пропускания принятого сигнала 32 через фильтр 38 верхних частот. Сигнал 36 переменного тока относится к меняющейся во времени интенсивности, зафиксированной датчиком. Может также быть сформирован сигнал 35 постоянного тока путем пропускания полученного сигнала 32 через фильтр 42 нижних частот, который производит интегрирование, обычно с постоянной времени, равной нескольким секундам. Сигнал 35 постоянного тока относится к квазистатической интенсивности, зафиксированной датчиком. Фильтрование может быть выполнено либо в аппаратных средствах с использованием обычных линейных стационарных фильтров, либо после оцифровывания в микропроцессоре с использованием цифровых фильтров, например фильтра с конечной импульсной характеристикой. Преимуществом цифрового фильтрования является возможность при необходимости менять параметры фильтра путем обновления программного обеспечения.
Сигнал или сигналы (если имеются фильтры верхних и нижних частот) затем подают в аналогово-цифровой преобразователь (ADC) 35, а затем - в обрабатывающую схему 24. Аналогово-цифровой преобразователь может быть дискретным элементом или может входить в состав микропроцессора.
Перед тем, как сигналы обрабатываются обрабатывающей схемой 24 с формированием метрики 25А, эти сигналы могут быть обработаны логарифмической функцией. Эта логарифмическая функция может быть применена в аналоговой или цифровой частях системы. Если ее применяют в цифровой части системы, она может быть выполнена интерфейсом 22 или обрабатывающей схемой 24.
Спектр оптического поглощения можно моделировать с использованием закона Ламберта-Бира, согласно которому принятая оптическая интенсивность пропорциональна экспоненциальной функции, аргументом которой является произведение одномерной длины оптического пути на коэффициент поглощения. Взятие натурального логарифма принятой интенсивности дает результат, линейно зависимый от длины оптического пути. Можно считать, что длина оптического пути изменяется в зависимости от объема крови в тканях, на который влияет положение субъекта и реакции в виде расширения артерий.
В рассматриваемом примере обрабатывающая схема включает процессор 40, память 42, дисплей 44 и сетевой интерфейс 46. Процессор 40 предназначен для чтения данных из памяти 42 и записи данных в память 42, для выработки команд по выводу данных на дисплей 44 и для осуществления связи с использованием сетевого интерфейса 46.
Процессор 40 обычно выполняет программу 48, хранящуюся в памяти 42, для вычисления метрики 25, а затем отображения этой метрики 25 на дисплее 44.
Компьютерная программа может поступать в устройство с помощью любого подходящего механизма доставки. Такой механизм доставки может включать использование, например, машинно-читаемого носителя, компьютерного программного продукта, запоминающего устройства, носителя записи, например компакт-диска (CD-ROM) или цифрового видеодиска (DVD), производственного изделия, которое явно включает компьютерную программу. Механизм доставки может включать сигнал, предназначенный для надежной доставки компьютерной программы.
Точной формой алгоритма для использования множества датчиков является кинематический тест со множеством положений, который по существу включает суммирование нелинейных взвешенных входных сигналов 23. Перед применением алгоритма сигналы 23 могут быть подвергнуты некоторым статистическим манипуляциям. Например, можно вычислить среднее значение сигнала 35 постоянного тока, а для сигнала 36 переменного тока можно вычислить среднеквадратическое значение.
Веса в рамках алгоритма могут быть установлены с использованием априорных знаний или посредством обучения с использованием обучающей картины и изменения весов в зависимости от ошибки.
Если имеет место множество i положений, множество j мест установки датчиков и множество k длин волн датчика, то метрика y может быть определена как:

где sijk - входной сигнал 23 для положения i в месте j на длине волны k.
Вычисление весов с возможно с использованием регрессивного анализа. Кинематический тест с множеством положений должен проводиться на некоторой группе субъектов, которые проходят также независимое клиническое исследование. Затем сопоставление результатов регрессивного анализа измеренных входных данных методом наименьших квадратов с идеальной метрикой позволяет определить веса для алгоритма.
Альтернативно, метрику можно определить как произвольное взвешенное суммирование нелинейных функций входных сигналов sijk с использованием искусственной нейронной сети 50, например схематично показанной на фиг.3.
Искусственные нейронные сети (Artificial Neural Networks, ANN) - это класс нелинейных взвешивающих алгоритмов. Упреждающее представление, как показано на фиг.3, состоит из ориентированного ациклического графа, представляющего собой взаимно соединенные узлы 52, сгруппированные по слоям 54А, 54В, 54С.
Упреждающая сеть 50, показанная на фиг.3, имеет три слоя нейронов. Каждый входной сигнал 23А, 23В, 23С, 23D посылается в каждый нейрон 52 во входном слое 54А. Каждый нейрон 52 во входном слое 54А формирует свою собственную взвешенную сумму входных сигналов 23A-D и предоставляет эту сумму в качестве выходного сигнала. Выход каждого нейрона 52 во входном слое 54А связан с каждым нейроном 52 в скрытом слое 54 В. Каждый нейрон 52 в скрытом слое 54 В формирует свою собственную взвешенную сумму сигналов на своих входах и предоставляет эту сумму в качестве выходного сигнала. Выход каждого нейрона 52 в скрытом слое 54 В соединен с каждым нейроном 52 в выходном слое 54С.Каждый нейрон 52 в выходном слое 54С формирует свою собственную взвешенную сумму сигналов на своих входах и умножает эту взвешенную сумму на функцию активации с формированием метрики 25.
Метрику 25 можно ограничить, сделав ее непрерывной функцией, изменяющейся в диапазоне от 0 до 1, с использованием в качестве функции активации сигмоидальной функции, или между -1 и 1 - с использованием в качестве функции активации гиперболического тангенса (th). Если решено сделать метрику дискретной, тогда в качестве функции активации можно выбрать сигнум-функцию или ступенчатую функцию.
В некоторых вариантах осуществления может оказаться достаточным использование двух слоев 54 нейронов 52.
Различные веса, применяемые при взвешенном суммировании, могут быть определены с использованием управляемого обучения и алгоритма обратного распространения (ошибок). Альтернативно, оптимальные веса можно найти с использованием генетического алгоритма. Веса содержатся в калибровочных данных 28.
Если имеется i входных узлов, j скрытых узлов и только один выходной узел, метрика может быть определена как:

где:


xi=(AC(λ1…n, P1…q)s1, DC(λ1…n, P1…q)s1,…, AC(λ1…n, P1…q)sm, DC(λ1…n, P1…q)sm)
Отметим, что xi представляет собой статистический вектор для пульсирующего компонента (АС) и квазистатического компонента (DC) сигнала соответствующего датчика (S1…m) для различных длин волн (λ1…n) для каждого положения (P1…q).
Веса определяют с использованием алгоритма самообучения. Обучение, аналогичное простому алгоритму, рассмотренному выше, требует, чтобы известные обучающие данные подавались в искусственную нейронную сеть, а модификация весов проводилась с использованием функции ошибок или правил обучения.
Обучение сети 50 проводят путем подачи на нее значений входного сигнала для положений, полученных из кинематического теста, а затем используют сравнение с использованием алгоритма обратного распространения для уменьшения ошибки между выходной метрикой и ожидаемой метрикой.
Шаги алгоритма обратного распространения в рамках управляемого обучения искусственной нейронной сети могут включать:
1. Подачу в искусственную нейронную сеть известных входных обучающих сигналов.
2. Для каждого выходного нейрона в выходном слое сравнение выходной метрики искусственной нейронной сети с ожидаемой метрикой для известного обучающего образца и вычисление локальной ошибки.
3. Для каждого выходного нейрона подбор весов для уменьшения локальной ошибки.
4. Присваивание нейронам в скрытом слое различных вкладов в локальную ошибку, что повышает «ответственность» нейронов, связанных с большими весами.
5. Повторение шагов 3 и 4 для нейронов в скрытом слое с использованием ответственности каждого в качестве его ошибки.
Из вышеизложенного очевидно, что метрика чувствительна к местоположению датчика и порядку и типу положения в кинематическом тесте.
Для обеспечения правильного порядка и типа положения в кинематическом тесте, соответствующем текущим калибровочным данным 28, устройство 20 может предоставить инструкции либо посредством дисплея 44, либо путем синтезирования голосового сообщения. Инструкции указывают, когда и как следует изменить положение субъекта.
Имеются различные наборы калибровочных данных для различных кинематических тестов. Возможно наличие меню для выбора конкретного теста. Затем для использования устройством 20 загружаются правильные калибровочные данные 28 вместе с инструкциями, оперативно описывающими, как проводить кинематический тест.
Также важно, чтобы датчики были размещены точно и установлены на субъекте так, что не оказывают случайных помех на сигналы 23.
На фиг.4А и 4В показаны два различных примера устройства 60, имеющего гибкие подложки 62, которые удобны для установки датчиков на субъект 8.
Устройство 60 включает гибкую подложку 62, имеющую эргономичную форму.
На одном конце 64 гибкой подложки 62 рядом друг с другом расположены излучатель (излучатели) света и фотодетектор (фотодетекторы), образующие датчик 66 отражения.
Адгезивное окаймление 68 которое окружает и плотно ограничивает датчик 66 отражения, используется для прикрепления конца 64 гибкой подложки 62 к субъекту. Окаймление 68 предпочтительно является по существу непрозрачным для рабочих длин волн фотодетектора, и поэтому изолирует фотодетектор от окружающего света. Адгезивное окаймление может иметь форму кольца. Адгезивное окаймление 68 может быть изготовлено из гидрогеля.
Вторая часть 70 гибкой подложки 62 согнута, чтобы действовать как датчик 72 оптического пропускания - излучатель (излучатели) 72А света установлены на одной стороне выступа, а фотодетектор (фотодетекторы) 72 В установлены на другой стороне выступа.
Адгезивное окаймление 68, которое окружает и плотно ограничивает излучатель 72А света, и адгезивное окаймление 68, которое окружает и вплотную ограничивает фотодетектор 72 В, используются для крепления конца 70 гибкой подложки 62 к субъекту. Термин «ограничивает» означает, что адгезивное окаймление окружает, но не обязательно касается. Предпочтительно, чтобы окаймления 68 были по существу непрозрачными на рабочих длинах волн фотодетектора и изолировали фотодетектор от окружающего света. Адгезивное окаймление может иметь форму кольца. Адгезивное окаймление 68 может быть изготовлено из гидрогеля.
Адгезивные окаймления 68 прилепляют датчики в стратегически правильном месте, и они позволяют обойтись без системы механических зажимов, которая оказывает давление на артерии и вены переносицы. Это особенно важно для датчиков отражения, поскольку они чувствительны к расширению сосудов, которое маскируется механическим сжатием.
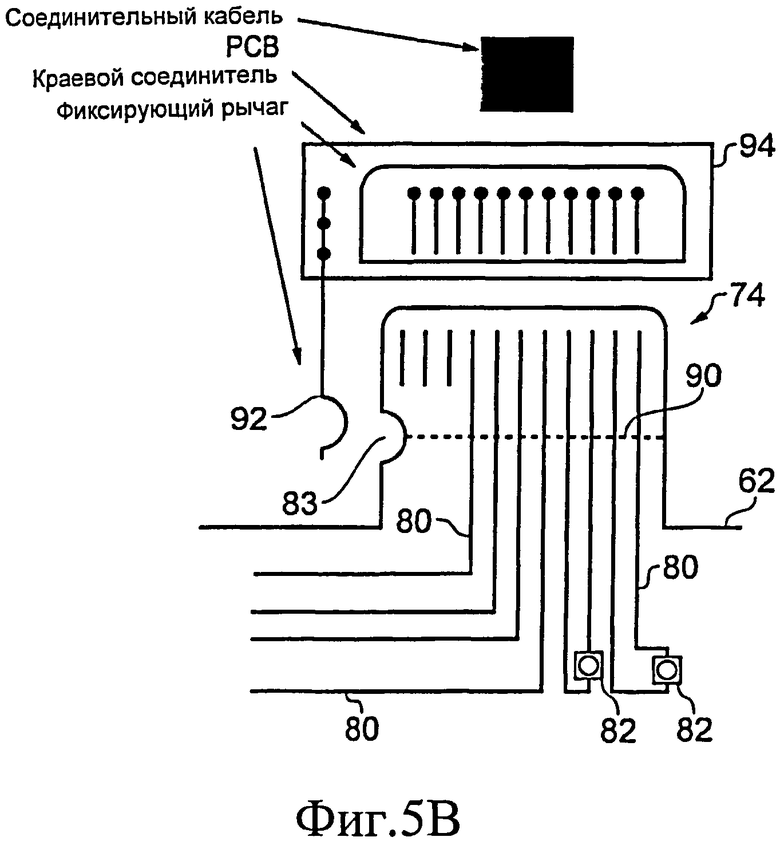
Межсоединения идут от краевого соединителя 74 (где встроенные контакты выступают относительно гибкой подложки и вставляются в пружинный листовой металлический разъем, по одному контакту на каждый коннектор) до конца 64 и конца 70 гибкой подложки 62 и осуществляют связь с источниками света и фотодетекторами.
На фиг.4А гибкая подложка 62 имеет форму буквы «Y» или «Т». Конец 62 расположен на лбу субъекта. Конец 70 согнут вокруг переносицы и действует как датчик пропускания.
Расстояние между переносицей и датчиком отражения на голове можно отрегулировать с использованием пряжки (не показана), обычно расположенной между бровями, что возможно только с использованием гибкой подложки, которая повторяет форму пряжки. Альтернативно, гибкая подложка может изгибаться дугой для компенсации излишней длины, поскольку адгезивное кольцо из гидрогеля должно надежно зафиксировать активные компоненты неинвазивных оптических датчиков на коже. Обычно после использования на одном субъекте гибкую подложку выбрасывают, чтобы поддержать гигиену и избежать заражения одного субъекта другим.
На фиг.4В гибкая подложка 62 имеет форму буквы «Y» или «Т». Конец 62 располагают поверх общей разгибательной мышцы пальцев ноги, расположенной в области третьей клиновидной, кубовидной и плюсневой костей ноги. Конец 70 подложки 62 обертывают вокруг конца самого длинного пальца ноги (обычно второго пальца). Излучатель 72А света на пропускание устанавливают на ноготь, а фотодатчик 72В прошедшего света устанавливают на подушечку второго пальца, диаметрально противоположно излучателю 72А.
Гибкая подложка выполнена приспособленной к форме ноги субъекта, естественным образом повторяя контуры ноги для закрепления на втором пальце при установке датчика на субъекте. Гибкой подложке придана форма, соответствующая изгибу ноги, приближенно напоминающая букву «Z», что легко осуществимо с использованием штамповки и ламинирования проводящих элементов.
Преимущества способа адгезивной фиксации состоят в том, что адгезия гидрогеля обеспечивает размещение датчиков в правильных стратегических местах на ноге без необходимости использования систем механических зажимов или петли вокруг пальца. Артерии, питающие мягкие ткани пальца, проходят вдоль боковой стороны пальца; поэтому любой такой способ фиксации датчика на пальце, который использует крепления вокруг пальца, может привести к сжатию артерий и вен, сводя на нет тест, основанный на изменении положения тела. Это особенно важно, если должна наблюдаться реакция, связанная с расширением сосудов, поскольку эти механические эффекты маскируют гомеостатическую реакцию.
Кроме того, адгезивные подушечки могут быть расположены в стратегических точках вдоль гибкой подложки для стабилизации подложки и уменьшения перемещений датчика и результирующих артефактов, связанных с перемещением.
Гибкая подложка 62 показанная на фиг.5 В, может с незначительными изменениями быть подходящей для использования на руке. Датчик отражения расположен на внешней- стороне ладони, а датчик пропускания расположен на указательном пальце.
В альтернативном варианте осуществления упомянутого датчика на гибкой подложке используются элементы датчика с обеих сторон подложки, что позволяет использовать подложку на любой ноге.
Определение элемента для правой или левой части тела Соединительный кабель соединяют с краевым соединителем 74. В соединительном кабеле имеется ряд контактов, которые соединены (возможно полупостоянно) посредством кабеля с определенными частями входной схемы 32. Следовательно, расположение контактов в интерфейсе соединительного кабеля имеет, по меньшей мере первоначально, заранее заданный специальный порядок. Таким образом, некоторый специальный контакт всегда используется для питания первого датчика, и некоторый специальный контакт всегда используется для приема сигнала.
Ниже упрощенная таблица иллюстрирует первое соответствие между контактами кабеля и контактами краевого соединителя.
Следующая упрощенная таблица иллюстрирует второе соответствие между контактами кабеля и контактами краевого соединителя.
Входная схема 32 может определить, какая из этих конфигураций используется, подавая сигнал управления выходным светодиодом только на контакт 1. Если входной сигнал принят входной схемой 32 на контакте 2 соединителя, то это значит, что используется первая конфигурация, а если входной сигнал принят входной схемой 32 на контакте 4 соединителя, то используется вторая конфигурация.
Для идентификации различных подложек 62 можно использовать различные конфигурации.
Альтернативно, одна и та же подложка может быть двусторонней, при этом первая конфигурация используется на одной стороне, а вторая конфигурация - на другой. Это позволяет входной схеме определить ориентирование подложки, то есть накладывается ли оно на левую или правую ногу. Затем входная схема может изменить способ подачи сигналов в подложку и способ интерпретации сигналов, поступающих из подложки.
Кроме того, для создания дополнительных конфигураций можно добавить избыточные и/или вырожденные контакты.
Поэтому можно иметь набор гибких подложек, при этом каждая подложка имеет эргономичную форму и предназначена для крепления на различные части тела субъекта. Каждая подложка может включать одинаковые (или различные) датчики и имеет набор межсоединений, которые поддерживаются гибкой подложкой и соединены с датчиками. Кроме того, у каждой подложки имеется интерфейс, включающий общую фиксированную физическую конфигурацию интерфейсных соединителей (соединительных контактов) для связи межсоединений с удаленной обрабатывающей схемой посредством кабеля. Порядок межсоединений относительно общей фиксированной физической конфигурации интерфейсных соединителей зависит от той части тела, на которую должна быть помещена гибкая подложка. При использовании гибкой подложки этот порядок межсоединений относительно общей фиксированной физической конфигурации интерфейсных соединителей однозначно указывает часть тела, к которой прикреплена гибкая подложка, для обрабатывающей схемы.
Вопросы безопасности
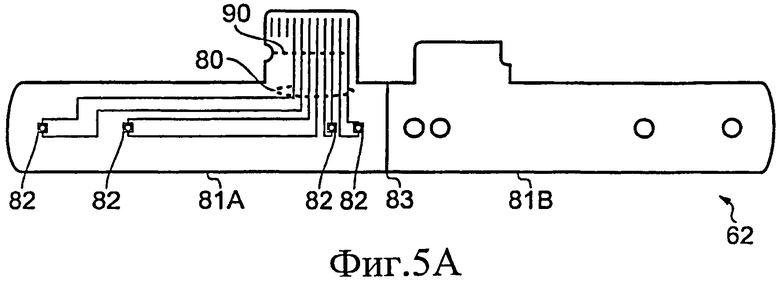
На фиг.5А, 5В и 5С у гибкой подложки 62 может иметься риска или частичный разрез 90 (легкий надрез) в области, близкой к краевому соединителю 74. Ширина риски может достигать всей лапки, поддерживающей краевой соединитель 74, или, более типично, составлять 90% от всей ширины, оставляя часть подложки без риски. Эта риска задает локальное структурно слабое место, которое определяется глубиной риски, поперечным сечением подложки и пределом прочности материала подложки на растяжение.
Межсоединения 80, соединяющие краевой соединитель 74 с датчиками, могут быть выполнены из проводящей пасты, толщиной которой управляют так, чтобы поперечное сечение было уже ширины риски, но все еще достаточной для переноса необходимого тока.
Конструкция дистального охватывающего конца краевого соединителя 94 включает подпружиненный фиксатор 92, который входит в паз 83 на боковой стороне охватываемой части краевого соединителя 74 подложки, или, альтернативно, кабельный краевой соединитель включает подпружиненный фиксирующий штифт, который входит в зацепление с отверстием в подложки близко к выступающим краям соединительной лапки. Эти элементы защищены кожухом краевого соединителя и недоступны для пользователя. В предпочтительном варианте небольшая часть печатной платы используется в качестве шасси, при этом краевой соединитель установлен на печатной плате и припаян к ней посредством ножек, при этом часть из пружинной стали, действующая как фиксатор, также припаяна к печатной плате. Кабельный кожух служит для защиты и формирует надежную, жесткую оболочку, которая может выдержать силу фиксатора и силу оператора.
Когда кинематический тест завершен, оператор удаляет подложку 62 с субъекта обычным способом. Датчик удалить с субъекта легко, но для того, чтобы отсоединить подложку 62 от краевого соединителя, подложку нужно крепко захватить и потянуть, преодолевая силу подпружиненного фиксатора 92, расположенного в кожухе краевого соединителя. В этот момент участок подложки с риской ломается, разрывая межсоединения 80. Риска 90 идет поперек некоторых или всех межсоединений 80.
Поскольку риска проходит только через часть подложки, часть подложки все еще останется незатронутой, удерживая лапку на оставшейся части подложки. Это препятствует разламыванию подложки на две части, а лапку краевого соединителя предохраняет от застревания в охватывающей части краевого соединителя.
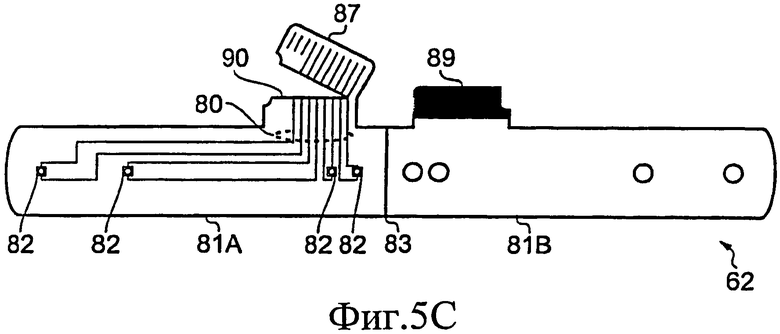
Чтобы облегчить описываемый процесс, подложка выполнена слоистой и состоящей из двух слоев 81А и 81В, которые согнуты относительно соединения 83 и склеены вместе (фиг.5А). Между слоями, где в слое 81А имеется риска 90, адгезива нанесено меньше или не нанесено вообще. В этом варианте осуществления риска сделана только в слое 81А, поддерживающем межсоединения. Часть этого слоя 81А, ограниченного риской, отламывается и может быть удалена (фиг.6С). Однако фиксатор теперь не действует, и оставшуюся часть можно легко удалить из охватывающего краевого соединителя.
Другой слой 81В, лежащий под съемной частью 87 слоя 81А, может быть окрашен 89, например, в красный цвет. Когда часть 87 слоя 81А отделяется, разрывая межсоединения 90, нижний цветной слой 89 становится видимым. Это указывает пользователю, что подложка 62 уже использовалась и должна быть выброшена.
Этот способ разрыва проводников из проводящей пасты гораздо эффективнее по сравнению со случайным, возможно неполным, разрушением проводника после использования, обусловленным физической усталостью материала, поскольку предлагаемый способ разрушения электрического проводника является четким и надежным. Попытка повторного использования подложки с разорванными проводниками будет обнаружена входной схемой 32 при стандартном самотестировании в начале кинематического теста. Например, обнаружение недостаточной мощности, потребляемой светодиодами, указывает на разрыв проводников, ведущих к фотодиоду.
Для дополнительной безопасности может быть введен программируемый компонент, например в качестве части проводящей пасты внутри датчика может быть включена плавкая связь, что позволяет системе после теста маркировать датчик как «использованный». Плавкая связь может быть выполнена путем тщательного управления процессом изготовления печатной платы для нанесения участка проводящей пасты с известной площадью поперечного сечения, рассчитанной на заданное максимального значение рассеиваемой мощности. Короткий электрический импульс, по существу превышающий эту максимальную рассеиваемую мощность, способен контролируемым образом разрушить плавкую связь, оставляя цепь разомкнутой. Плавкая связь может идти к дополнительному проводнику краевого соединителя, или может быть частью существующих элементов слежения внутри датчика.
Блоки, показанные на чертежах, могут представлять шаги способа и/или разделы кодов в компьютерной программе. Иллюстрация конкретного порядка блоков не обязательно подразумевает, что существует заданный или предпочтительный порядок блоков, и поэтому порядок и расположение блоков может быть различным. Кроме того, некоторые шаги могут быть опущены.
Хотя выше варианты осуществления изобретения были описаны на различных примерах, очевидно, что в данных примерах могут быть сделаны различные изменения без превышения объема изобретения, заявленного в формуле изобретения.
Признаки, описанные выше, могут использоваться в комбинациях, отличающихся от описанных явно.
Хотя функции были описаны в отношении определенных признаков, эти функции могут выполняться другими признаками, как описанными выше, так и не описанными.
Хотя признаки были описаны в отношении конкретных вариантов осуществления настоящего изобретения, эти признаки могут также присутствовать в других вариантах осуществления настоящего изобретения, как описанных, так и не описанных.
Хотя в предыдущем описании внимание обращалось на те признаки изобретения, которые считались наиболее важными, очевидно, что заявитель подразумевает защиту любого патентоспособного признака или комбинации признаков, рассмотренных выше и/или показанных на чертежах, вне зависимости от того, придавалось ли им особое значение.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРАЛЬНОЕ УСТРОЙСТВО И СПОСОБ ВОСПРИЯТИЯ ОБРАЗОВ | 2006 |
|
RU2444059C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ ОБ ОСНОВНЫХ ФИЗИОЛОГИЧЕСКИХ ПОКАЗАТЕЛЯХ СУБЪЕКТА | 2014 |
|
RU2688445C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ РЕФЛЕКСА ВЫБРОСА МОЛОКА | 2018 |
|
RU2764170C2 |
| ПОРТАТИВНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ НЕИНВАЗИВНОГО ИЗМЕРЕНИЯ ЭЛЕМЕНТОВ КРОВИ | 2022 |
|
RU2793540C1 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОЙ ОБРАТНОЙ СВЯЗИ С ЦЕЛЬЮ СТИМУЛИРОВАНИЯ МОЗГА ДЛЯ РЕАЛИЗАЦИИ РЕАБИЛИТАЦИИ И/ИЛИ ПРОФИЛАКТИКИ НЕЙРОДЕГЕНЕРАЦИИ | 2023 |
|
RU2823580C1 |
| СРЕДСТВО И СПОСОБ ОБНАРУЖЕНИЯ КРОВОТЕЧЕНИЯ ИЗ РАН | 2005 |
|
RU2350263C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ИЗВЛЕЧЕНИЯ ФИЗИОЛОГИЧЕСКОЙ ИНФОРМАЦИИ | 2013 |
|
RU2653799C2 |
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ МОНОВОЛОКОННОЙ ОПТИЧЕСКОЙ ТЕЛЕМЕТРИИ | 2005 |
|
RU2389046C2 |
| УСТРОЙСТВА И СПОСОБЫ ДЛЯ КОНТАКТНОЙ ЛИНЗЫ С ОБРАЩЕННЫМ ВНУТРЬ ИСТОЧНИКОМ СВЕТА | 2014 |
|
RU2639616C2 |
| СПОСОБ АНАЛИЗА КЛЕТОК И АНАЛИЗАТОР КЛЕТОК | 2021 |
|
RU2839419C1 |
Группа изобретений относится к медицине. Устройство, используемое в группе изобретений, содержит входной интерфейс, предназначенный для предоставления сигналов по меньшей мере от двух датчиков по меньшей мере для двух положений субъекта, включая сигналы, зависящие от наличия крови, от первого датчика, когда субъект находится в первом положении; сигналы, зависящие от наличия крови, от первого датчика, когда субъект находится во втором положении; сигналы, зависящие от наличия крови, от второго датчика, когда субъект находится в первом положении; и сигналы, зависящие от наличия крови, от второго датчика, когда субъект находится во втором положении; а также обрабатывающую схему, предназначенную для определения и вывода метрики путем объединения предоставленных сигналов согласно заранее заданным калибровочным данным. Группа изобретений позволяет вычислять метрику на основе экспериментальных испытаний. 4 н. и 18 з.п. ф-лы, 5 ил., 2 табл.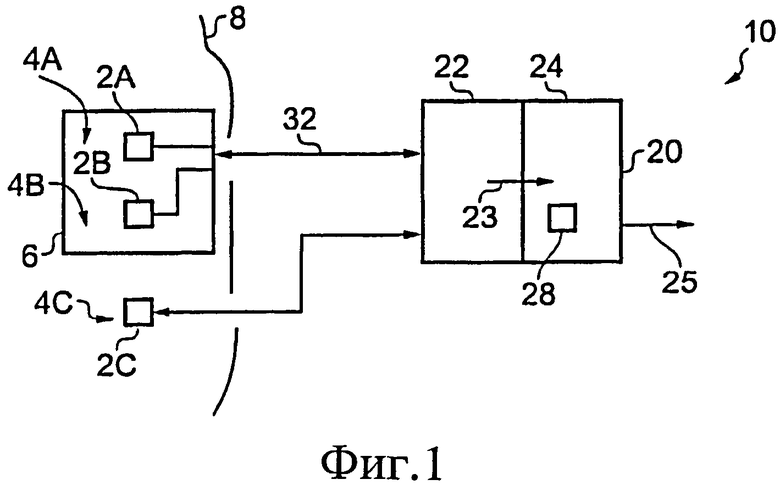
1. Устройство для оценки кровообращения субъекта, включающее: входной интерфейс, сконфигурированный для предоставления сигналов по меньшей мере от двух датчиков по меньшей мере для двух положений субъекта, причем предоставляемые сигналы включают:
сигналы, зависящие от наличия крови, от первого датчика, когда субъект находится в первом положении;
сигналы, зависящие от наличия крови, от первого датчика, когда субъект находится во втором положении;
сигналы, зависящие от наличия крови, от второго датчика, когда субъект находится в первом положении, и
сигналы, зависящие от наличия крови, от второго датчика, когда субъект находится во втором положении, и
обрабатывающую схему, сконфигурированную для определения и вывода метрики путем объединения упомянутых предоставленных сигналов согласно заранее заданным калибровочным данным.
2. Устройство по п.1, в котором входной интерфейс конфигурирован для предоставления сигналов, для каждой комбинации датчика и положения, включающих по меньшей мере один логарифм от обнаруженной интенсивности света.
3. Устройство по п.1 или 2, в котором входной интерфейс конфигурирован для предоставления сигналов, для каждой комбинации датчика и положения, включающих:
а) компонент обнаруженной интенсивности света, изменяющийся во времени, и отдельный квазистатический компонент обнаруженной интенсивности света; и/или
б) логарифм изменяющегося во времени компонента обнаруженной интенсивности света и логарифм квазистатического компонента обнаруженной интенсивности света; и/или
в) сигнал, основанный на сигнале интенсивности света, обнаруженном датчиком оптического отражения, и сигнал, основанный на сигнале интенсивности света, обнаруженном датчиком оптического пропускания; и/или
г) сигнал, основанный на сигнале интенсивности света, обнаруженном на первой длине волны, но не на второй длине волны, и сигнал, основанный на сигнале интенсивности света, обнаруженном по меньшей мере на второй длине волны, но не на первой длине волны.
4. Устройство по п.1 или 2, в котором обрабатывающая схема сконфигурирована для:
использования калибровочных данных для оценки расхождения предоставленных сигналов по сравнению с ожидаемой среднестатистической моделью для ожидаемых сигналов для формирования метрики, причем предоставленные сигналы содержат сигналы, которые были подвергнуты статистическим манипуляциям.
5. Устройство по п.1 или 2, в котором обрабатывающая схема сконфигурирована для эмулирования искусственной нейронной сети, включающей множество узлов, каждому из которых приписаны веса для входов узла, при этом эти веса определяются упомянутыми калибровочными данными, и искусственная нейронная сеть конфигурирована для приема упомянутых предоставленных сигналов в качестве входных данных, причем предоставленные сигналы содержат сигналы, которые были подвергнуты статистическим манипуляциям.
6. Устройство по п.1 или 2, дополнительно включающее память, хранящую множество наборов калибровочных данных, включающих набор калибровочных данных для каждой из множества заранее заданных стандартных последовательностей различных положений тела, при этом обрабатывающая схема сконфигурирована для определения и вывода метрики для конкретной заранее заданной стандартной последовательности различных положений тела путем объединения предоставленных сигналов согласно калибровочным данным для заранее заданной стандартной последовательности различных положений тела.
7. Устройство по п.1 или 2, в котором обрабатывающая схема сконфигурирована для оценки отклонения предоставленных сигналов от ожидаемого паттерна сигналов, который характеризует ожидаемую реакцию нормальной системы циркуляции крови на заранее заданную последовательность первого, второго и третьего положений.
8. Устройство по п.1 или 2, в котором обрабатывающая схема сконфигурирована для выполнения сравнения между паттернами, обеспечиваемыми предоставленными сигналами во время выполнения кинематического протокола, включающего по меньшей мере изменение между первым, вторым и третьим положением тела, и паттернами реакции при нормальном кровообращении.
9. Устройство по п.1 или 2, в котором обрабатывающая схема сконфигурирована для объединения предоставленных сигналов согласно заранее заданным калибровочным данным с использованием суммирования и взвешивания.
10. Устройство по п.9, в котором веса определяются путем обучения.
11. Система для оценки кровообращения субъекта, включающая:
устройство по любому предыдущему пункту; и
по меньшей мере первый датчик и второй датчик, сконфигурированные для предоставления сигналов входного интерфейса, зависящих от наличия крови.
12. Система по п.11, в которой первый датчик конфигурирован для обнаружения света на первой длине волны, но не на второй длине волны, а второй датчик конфигурирован для обнаружения света на второй длине волны, но не на первой длине волны.
13. Система по п.11 или 12, в которой первый датчик и второй датчик:
присоединены к гибкой подложке, включающей межсоединения, которые выполнены с возможностью соединения с упомянутым устройством посредством интерфейса, при этом в части гибкой подложки, служащей основанием для одного или более межсоединений, имеется искусственное структурно слабое место, и, при использовании, часть гибкой подложки с упомянутым слабым местом соединяется с интерфейсом, который удерживает подложку так, что при попытке отсоединения гибкой подложки от интерфейса, искусственное структурно слабое место разрывает одно или более межсоединений; и/или
присоединены к гибкой подложке для помещения на субъекта и соединены с обрабатывающей схемой через первый набор межсоединений, встроенных в гибкую подложку, при этом порядок межсоединений, встроенных в подложку, зависит от того, предназначена ли гибкая подложка для использования на правой конечности или на левой конечности, и порядок межсоединений, встроенных в подложку, при использовании, указывает обрабатывающей схеме, прикреплена ли гибкая подложка на правую конечность субъекта или на левую конечность субъекта; и/или
присоединены к первой стороне гибкой двусторонней подложки и выполнены с возможностью связи с обрабатывающей схемой посредством первого набора межсоединений на первой стороне гибкой подложки, а ко второй стороне гибкой подложки присоединены третий датчик и четвертый датчик, которые выполнены с возможностью связи с обрабатывающей схемой посредством второго набора межсоединений на второй стороне гибкой подложки,
при этом порядок в первом наборе межсоединений на первой стороне гибкой подложки, когда первая сторона гибкой подложки обращена вверх, отличается от порядка второго набора межсоединений на второй стороне гибкой подложки, когда вторая сторона гибкой подложки обращена наверх, что дает обрабатывающей схеме возможность определить, какая сторона двусторонней гибкой подложки работает.
14. Система по п.11 или 12, в которой входной интерфейс конфигурирован для обработки первых сигналов, обнаруженных первым датчиком, для выработки параллельных сигналов, которые имеют различные частотные составляющие, перед объединением в обрабатывающей схеме, входной интерфейс конфигурирован для обработки вторых сигналов, обнаруженных вторым датчиком, для выработки параллельных сигналов, которые имеют различные частотные составляющие, перед объединением в обрабатывающей схеме.
15. Система для оценки кровообращения субъекта, включающая:
первый детектор, сконфигурированный для обнаружения сигналов, зависящих от наличия крови, когда субъект находится в первом положении и когда субъект находится во втором положении;
по меньшей мере один другой детектор, сконфигурированный для обнаружения сигналов, зависящих от наличия крови, когда субъект находится в первом положении и когда субъект находится во втором положении, и
обрабатывающую схему, сконфигурированную для определения метрики путем объединения обнаруженных сигналов из первого и второго детекторов для первого и второго положений согласно калибровочным данным.
16. Способ оценки кровообращения субъекта, включающий:
прикрепление оптических датчиков к субъекту;
соединение оптических датчиков с устройством по любому из пп.1-10 для предоставления входному интерфейсу сигналов, зависящих от наличия крови; и
проведение субъекта через заранее заданную упорядоченную последовательность различных положений, включающую первое и второе положения.
17. Способ по п.16, в котором оптические датчики прикрепляют путем прикрепления одноразовой гибкой подложки к субъекту.
18. Способ по п.17, в котором одноразовую гибкую подложку присоединяют к конечности, и эта подложка включает по меньшей мере один датчик оптического отражения, и в котором гибкую подложку прикрепляют с использованием только адгезива и без использования зажимающего усилия.
19. Способ по п.17, в котором одноразовую гибкую подложку присоединяют к голове субъекта, и эта подложка включает по меньшей мере один датчик оптического пропускания.
20. Способ по любому из пп.16-19, включающий проведение субъекта через заранее заданную упорядоченную последовательность различных положений, включающую первое, второе и третье положения.
21. Способ по любому из пп.16-19, в котором оптические датчики находятся в одном и том же местоположении.
22. Способ по п.21, в котором первый и второй оптические датчики обнаруживают различные длины волн света в одном и том же местоположении.
| US2007270699A1, 22.11.2007 | |||
| WO2007093804A2, 23.08.2007 | |||
| US2008188728A1, 07.08.2008 | |||
| Роторный снегоочиститель | 1948 |
|
SU83179A1 |

