Изобретение относится к области противопожарной техники, а именно к роботизированным средствам пожаротушения. Комплекс предназначен для обеспечения пожаротушения и проведения пожарно-спасательных операций в условиях, связанных с высоким риском для жизни и здоровья личного состава, в том числе в условиях радиационно-химического заражения и риска осколочно-фугасного поражения.
Роботы используются во многих областях науки, техники и промышленности, в первую очередь там, где жизнедеятельность человека либо затруднена, либо вообще невозможна, например в зонах радиоактивного или химического загрязнения, в условиях боевых действий.
Однако одиночный робот не может быть использован для решения крупномасштабных задач, так как обладает ограниченными возможностями. Преимущества группового применения роботов очевидны. Во-первых, это больший радиус действия, во-вторых, расширенный набор выполняемых функций.
Известен мобильный роботизированный комплекс пожаротушения тяжелого класса ЕЛЬ-10 (Противопожарный робототехнический комплекс тяжелого класса для работ в зоне повышенных температур и осколочно-фугасного поражения «Ель-10». Руководство по эксплуатации. НТ602.00.00.00.000 РЭ).
Комплекс ЕЛЬ-10 обеспечивает: доставку огнетушащих веществ и проведение работ по пожаротушению в условиях техногенных аварий, сопровождаемых повышенным уровнем радиации, наличием отравляющих и сильнодействующих веществ в зоне работ, осколочно-взрывным поражением; разборку завалов для доступа в зону горения и ликвидации чрезвычайных ситуаций.
Недостатками данного робототехнического комплекса являются неудобство обслуживания, связанное со сложной конструкцией, и недостаточная проходимость.
Также применение данного робототехнического комплекса ограничено ввиду фиксированного количества запаса огнетушащего вещества. Для обеспечения эффективного применения мобильных роботизированных комплексов пожаротушения необходимо их обеспечение подачей воды в необходимом для их работы количестве.
Из уровня техники известно средство передвижения, которое на месте вызова разделяют на две платформы (US 20100218960 А1, опубл. 02.09.2010).
Также известен автономный самоходный пожарный комплекс (RU 2401684, кл. А62С 27/00, опубл. 20.10.2010), который позволяет обеспечить доставку средств пожаротушения и мониторинг состояния местности в районах пожаров.
Недостатками известных пожарных комплексов является то, что они не имеют дистанционного управления передвижением.
Из известных технических решений наиболее близким по назначению и технической сущности к заявляемому объекту является многоцелевой самоходный пожарный комплекс, описанный в патенте RU 2396097, кл. А62С 27/00, принятый за прототип заявляемого устройства.
Он обеспечивает доставку средств пожаротушения и мониторинг состояния местности в районах пожаров, доставку воды, смеси для пожаротушения к очагам возгорания.
Недостатком этого комплекса является то, что он также не имеет дистанционного управления.
Заявляемый способ доставки робототехнического комплекса повышенной проходимости к месту пожара и проведения спасательных работ и устройство для его реализации устраняют указанные недостатки.
Задачей изобретения является улучшение эксплуатационных характеристик и расширение функциональных возможностей мобильного робототехнического комплекса, позволяющее использовать пожарный комплекс в условиях, связанных с высоким риском для жизни и здоровья личного состава, в том числе в условиях радиационно-химического заражения и риска осколочно-фугасного поражения.
Для этого в способе тушения пожара робототехническим комплексом повышенной проходимости, включающем в себя доставку в экипажном режиме к месту пожара средства передвижения, состоящего из двух платформ, первую из которых перемещают к очагу пожара для его ликвидации, а вторую платформу - к оборудованному или необорудованному водоисточнику для использования установленного на ней насосного оборудования для подачи дополнительного количества воды, обе платформы перемещают дистанционно, при этом управление всеми технологическими операциями также осуществляют дистанционно, что исключает нахождение людей в зонах повышенной опасности.
Для этого в робототехническом комплексе повышенной проходимости, содержащем средство передвижения, состоящее из двух платформ, перемещаемых в экипажном режиме и имеющих возможность разъединения, причем первая платформа оборудована установкой пожаротушения с огнетушащим средством, оборудованием для проведения аварийно-спасательных работ, системами видеонаблюдения и радиосвязи, а вторая - системами видеонаблюдения и радиосвязи, насосной станцией и рукавной линией, собранной в дежурном режиме в бухту, устройство пожаротушения с огнетушащим средством и оборудование для проведения аварийно-спасательных работ, системы видеонаблюдения и радиосвязи, каждая платформа имеет устройство дистанционного управления движением и технологическими операциями.
Технический эффект, реализуемый заявляемым способом и устройством, обусловлен повышением эффективности проведения работ и снижением риска жизни и здоровью личного состава при проведении аварийно-спасательных работ и пожаротушения в условиях чрезвычайной ситуации.
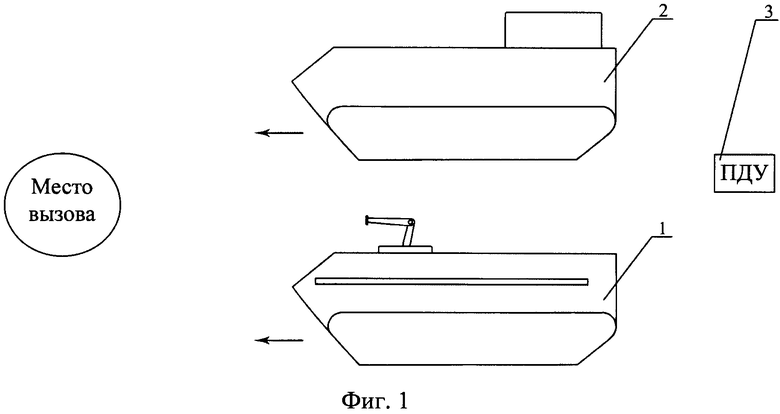
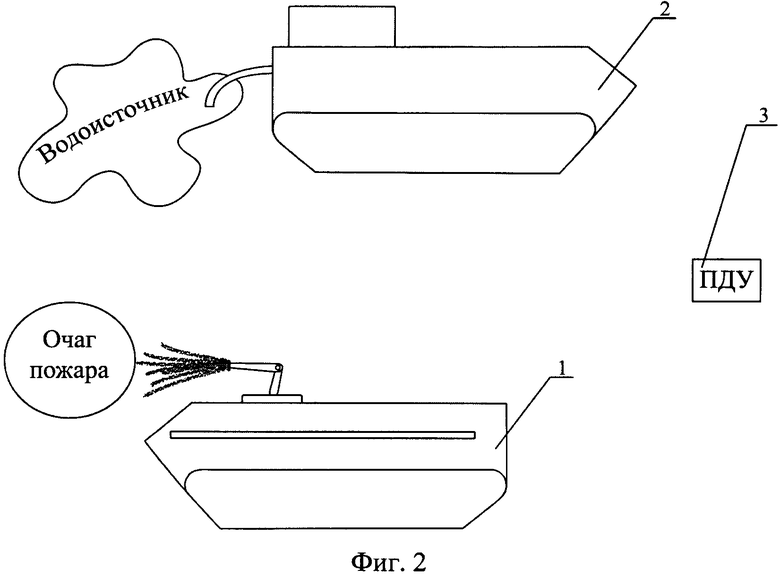
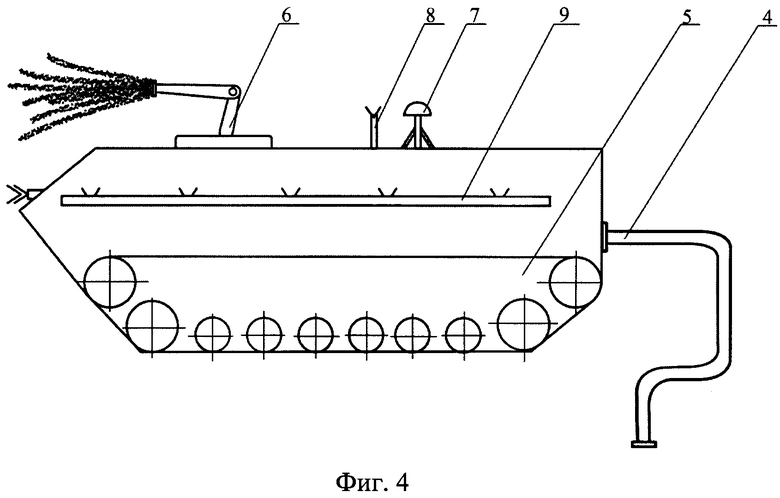
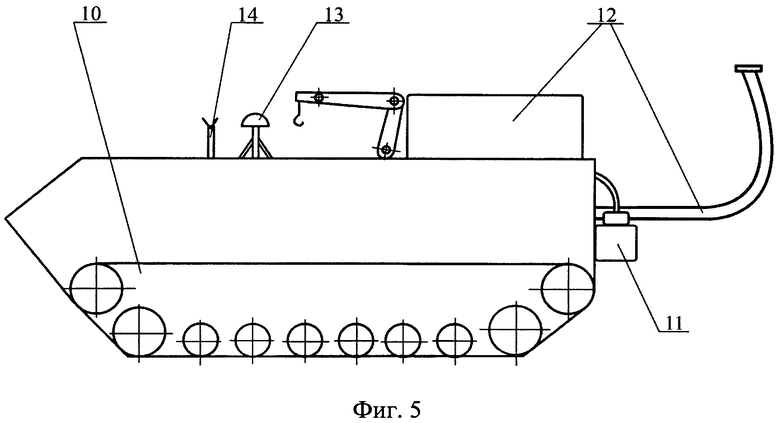
На фиг. 1 изображена схема перемещения робототехнического комплекса к месту вызова, на фиг. 2 - схема прибытия в зону чрезвычайной ситуации, на фиг. 3 - схема подачи дополнительного количества воды к очагу пожара, на фиг. 4 - схема первой платформы, на фиг. 5 - схема второй платформы.
При поступлении сигнала робототехнический комплекс, состоящий из платформы 1 и платформы 2, выдвигается к месту вызова. Управление комплексом осуществляется от пульта дистанционного управления 3 или в экипажном режиме. При прибытии на место комплекс разделяется: платформа 1 перемещается к очагу пожара для его тушения, а платформа 2 - к водоисточнику для забора дополнительного количества воды и подачи ее по рукавным линиям 4 к очагу пожара. При этом управление комплексом также осуществляется или от пульта дистанционного управления, или в экипажном режиме.
Первая платформа состоит из шасси 5, комплекта оборудования пожаротушения 6, цистерны запаса воды и цистерны запаса пенообразователя, комплекта видеонаблюдения 7, системы радиосвязи и антенно-фидерных устройств 8, бортовой системы управления и системы орошения (охлаждения) 9.
Вторая платформа состоит из шасси 10, комплекта насосного оборудования с гидравлическим приводом 11, комплекта прокладки рукавной линии 12, комплекта видеонаблюдения 13, системы радиосвязи и антенно-фидерных устройств 14 и бортовой системы управления.
Дополнительно, платформа, предназначенная для проведения работ по пожаротушению, оснащена системами орошения и курсового тушения.
Система орошения предназначена для охлаждения корпуса машины при движении ее в условиях низового и верхового пожаров. Система состоит из комплекта трубопроводов, проложенных снаружи вдоль бортов машины и установленных на нем фильерок, служащих для подачи распыленной струи воды на крышу и борта корпуса машины.
Система курсового тушения предназначена для охлаждения и борьбы с низовым возгоранием дорожного пространства перед машиной при ее движении в условиях низового и верхового пожаров. Система состоит из трубопроводов подачи воды, запорной арматуры и поливающих форсунок курсового тушения. Трубопровод с поливающими форсунками находится на лобовом листе корпуса и защищен стальным кожухом.
Конструкция машины в отличие от основных колесных пожарных машин позволяет бороться с пожарами в движении в непосредственном контакте при малой интенсивности пожара. При этом в зависимости от поставленных задач можно включить курсовое тушение и самоорошение (условия низового и верхового пожара), или курсовое тушение и подачу воды на стационарный лафетный ствол (условия низового или торфяного пожаров). В условиях торфяного пожара имеется целесообразность придавать машине ход «змейкой» для дополнительного перемешивания верхнего слоя грунта гусеницами.
В качестве шасси робототехнического комплекса используются гусеничные дистанционно-управляемые шасси, что обеспечивает высокую проходимость и пожаростойкость.
Обе платформы комплекса могут перемещаться как дистанционно, так и вручную, то есть в экипажном режиме. Каждая платформа имеет устройство дистанционного и ручного управления технологическими операциями. Причем конструктивное исполнение установки исполнительных приводов и элементов бортовой системы дистанционного управления не препятствует ручному управлению при перемещении машины в экипажном режиме.
Дистанционное управление робототехническим комплексом обеспечивает следующие функциональные возможности по управлению:
- движением шасси;
- оборудованием пожаротушения;
- аппаратурой видеонаблюдения.
Оборудование системы дистанционного управления комплекса обеспечивает возможность управления одновременно работой двух платформ.
Комплект насосного оборудования обеспечивает подачу воды из внешнего водоисточника в двух режимах для обеспечения пожаротушения и откачки воды из водоема или емкости, при этом вода из внешнего водоисточника может забираться насосной станцией при нахождении машины на поверхности воды и на берегу водоема.
Таким образом, отличительные признаки предлагаемого технического решения являются новыми и отвечают критерию «новизна».
Разработанный комплекс обладает высокой мобильностью и проходимостью, в том числе плавучестью, позволяет обеспечить доставку средств пожаротушения в районы пожаров и предназначен для тушения пожаров и проведения спасательных работ с помощью ввозимого запаса огнетушащих веществ, пожарно-технического вооружения и аварийно-спасательного инструмента, а также для подачи к месту пожара огнетушащих веществ от других источников. Комплекс также может быть использован для откачки воды при чрезвычайных ситуациях природного и техногенного характера и перекачки огнетушащих веществ и высокопроизводительного наполнения одной или одновременно нескольких емкостей.
Использование предлагаемого технического решения повышает эффективность пожаротушения, расширяет функциональные возможности мобильного робототехнического комплекса и обеспечивает возможность пожаротушения и проведения пожарно-спасательных операций в условиях, связанных с высоким риском для жизни и здоровья личного состава, в том числе в условиях радиационно-химического заражения и риска осколочно-фугасного поражения.
Изобретение относится к области противопожарной техники, а именно к роботизированным средствам пожаротушения. Способ тушения пожара включает в себя доставку к месту пожара средства передвижения повышенной проходимости, которое состоит из двух платформ, одну из которых перемещают к очагу пожара для его ликвидации, а другую платформу - к водоисточнику для подачи дополнительного количества воды. При этом каждая платформа имеет устройство дистанционного и ручного управления транспортными и технологическими операциями. Разработанный комплекс обладает высокой мобильностью и проходимостью. Использование предлагаемого технического решения повышает эффективность пожаротушения, расширяет функциональные возможности мобильного робототехнического комплекса и обеспечивает возможность пожаротушения и проведения пожарно-спасательных операций в условиях, связанных с высоким риском для жизни и здоровья личного состава, в том числе в условиях радиационно-химического заражения и риска осколочно-фугасного поражения. 2 н.п. ф-лы, 5 ил.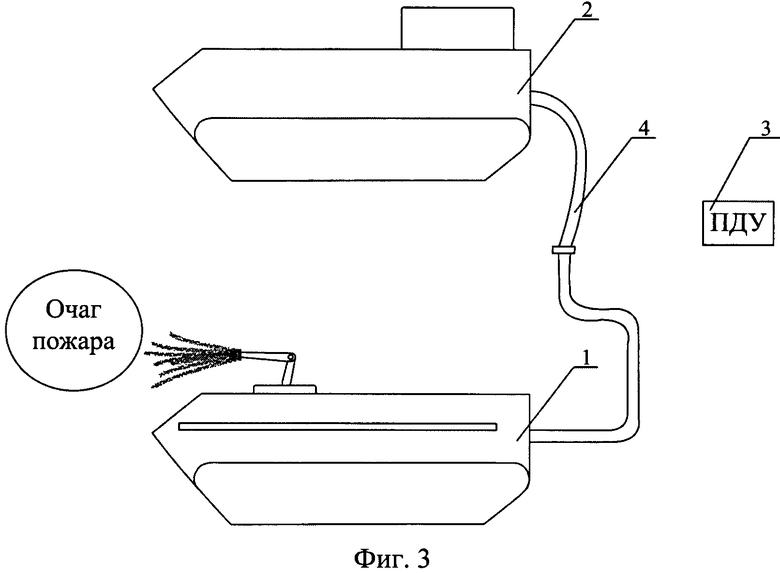
1. Способ тушения пожара робототехническим комплексом повышенной проходимости, включающий в себя доставку в экипажном режиме к месту пожара средства передвижения, состоящего из двух платформ, первую из которых перемещают к очагу пожара для его ликвидации, а вторую платформу - к оборудованному или необорудованному водоисточнику для использования установленного на ней насосного оборудования для подачи дополнительного количества воды, отличающийся тем, что обе платформы перемещают дистанционно, при этом управление всеми технологическими операциями также осуществляют дистанционно, что исключает нахождение людей в зонах повышенной опасности.
2. Робототехнический комплекс повышенной проходимости, содержащий средство передвижения, состоящее из двух платформ, перемещаемых в экипажном режиме и имеющих возможность разъединения, причем первая платформа оборудована установкой пожаротушения с огнетушащим средством, оборудованием для проведения аварийно-спасательных работ, системами видеонаблюдения и радиосвязи, а вторая - системами видеонаблюдения и радиосвязи, насосной станцией и рукавной линией, собранной в дежурном режиме в бухту, устройство пожаротушения с огнетушащим средством и оборудование для проведения аварийно-спасательных работ, системы видеонаблюдения и радиосвязи, отличающийся тем, что каждая платформа имеет устройство дистанционного управления движением и технологическими операциями.
| МНОГОЦЕЛЕВОЙ САМОХОДНЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2009 |
|
RU2396097C1 |
| US 20100218960 A1, 02.09.2010 | |||
| Способ получения фенопластов из новолачных фенольно-формальдегидных смол и отвердителей | 1954 |
|
SU105833A1 |
| АВТОНОМНЫЙ САМОХОДНЫЙ ПОЖАРНЫЙ КОМПЛЕКС | 2009 |
|
RU2401684C1 |
| Пожарные автомобили: Учебник для пожарно-технических училищ/ под общ | |||
| ред | |||
| М.Д | |||
| Безбородько.- Л.: Машиностроение | |||
| Ленингр | |||
| отд-ние, 1982, с.149-151, рис | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |

