Инструмент для захвата, удержания и дозированного перемещения микрочастиц относится к медицине, в частности к офтальмологии, и может быть использован в микрохирургии при проведении научно-исследовательских работ на экспериментальных животных, в частности может быть использован в микрохирургии при работе с микрочастицами.
В настоящее время существующие инструменты на практике не способны захватить и перенести микрочастицу величиной в десятые и сотые доли миллиметра. Наиболее распространенным и относительно близким к заявленному инструменту является медицинский пинцет [1], основным назначением которого является механический захват и удержание, однако размеры рабочей части этого пинцета позволяют захватывать и удерживать только относительно крупные объекты.
Шагом вперед является создание микрохирургических пинцетов, размеры рабочей части которых значительно меньше и позволяют осуществить захват и удержание меньшей площадью [2].
Однако, как показали наши исследования, размеры рабочей части даже микрохирургических пинцетов не способны захватить и удержать микрочастицы размером в десятые и сотые доли миллиметра, то есть принцип механического захвата и удержания микрочастиц не срабатывает.
Технический результат предлагаемого изобретения - обеспечение надежного захвата, удержания и дозированного перемещения микрочастиц размером в десятые и сотые доли миллиметра.
Технический результат, полученный инструментом для захвата, удержания и дозированного перемещения микрочастиц, достигается благодаря тому, что он состоит из корпуса, снабженного силиконовой ручкой и надетой на верхнюю его часть эластичной силиконовой пневмонасадкой, конусовидного перехода и рабочего кончика, причем приподнятая кверху часть рабочего кончика связана с конусовидным переходом через коленообразующий изгиб, а приподнятая кверху часть рабочего кончика и коленообразующий изгиб имеют одинаковые внутренние диаметры, достаточные для свободного перемещения микрочастиц.
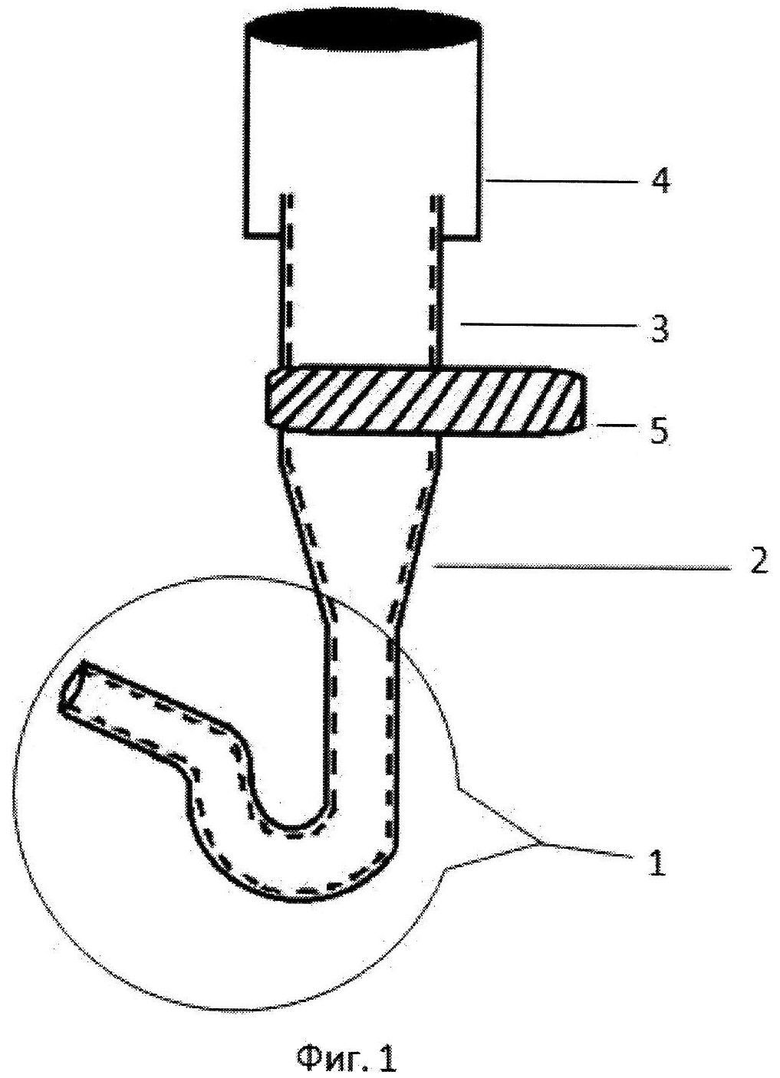
На Фиг. 1 изображен общий вид инструмента для захвата, удержания и дозированного перемещения микрочастиц.
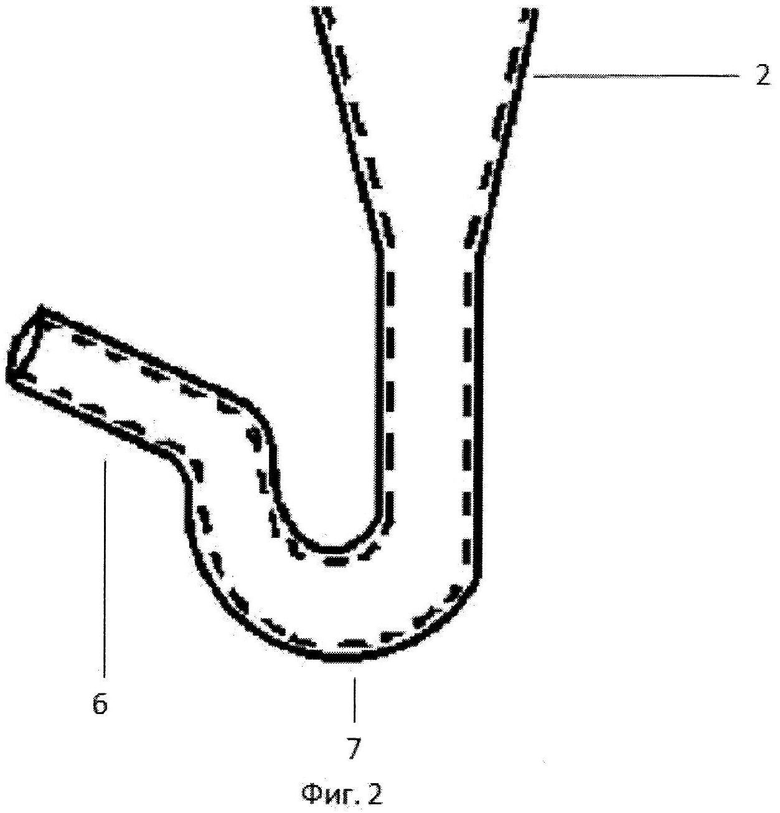
На Фиг. 2 представлен рабочий кончик.
Инструмент для захвата, удержания и дозированного перемещения микрочастиц состоит из: рабочего кончика 1, конусовидного перехода 2, корпуса 3, силиконовой пневмонасадки 4, силиконовой ручки 5.
Рабочий кончик 1 имеет приподнятую кверху часть 6 и коленообразующий изгиб 7.
Внутренний диаметр рабочего кончика 1 обеспечивает свободное прохождение микрочастиц под воздействием воздушного потока, проходящего внутри инструмента.
Приподнятая кверху часть 6 препятствует выпадению микрочастиц при вертикальном положении инструмента.
Коленообразующий изгиб 7 препятствует обратному выпадению микрочастиц из инструмента. Конусовидный переход 2 обеспечивает переход от диаметра просвета рабочего кончика 1 к диаметру просвета корпуса 3 и служит для хранения микрочастиц.
Корпус 3 - это полый цилиндр, объем воздуха которого вместе с объемом воздуха силиконовой пневмонасадки 4 обеспечивает достаточную силу воздушного потока.
Силиконовая пневмонасадка 4 - это эластичная трубка, изменяя диаметр которой путем сжимания вручную, обеспечивают создание воздушного потока. Один конец пневмонасадки 4 одет на корпус 3, а второй ее конец закрыт.
Силиконовая ручка 5 одета на корпус 3 и обеспечивает удобную фиксацию инструмента для захвата, удержания и дозированного перемещения микрочастиц в руке.
Новое конструктивное решение - захват и дозированное перемещение микрочастиц воздушным потоком, а удержание микрочастиц в инструменте для захвата, удержания и дозированного перемещения микрочастиц обеспечивается конструктивной особенностью рабочего кончика 1. Рабочий кончик 1, конусовидный переход 2 и корпус 3 изготовлены из стекла.
Методика работы с инструментом для захвата, удержания и дозированного перемещения микрочастиц следующая. Сжать силиконовую пневмонасадку 4 и, выпустив воздух из инструмента для захвата, удержания и дозированного перемещения микрочастиц, поднести рабочий кончик 1 к микрочастице. Затем, отпустив силиконовую пневмонасадку 4, воздушным потоком засосать микрочастицу до уровня конусовидного перехода 2 и поднести рабочий кончик 1 к месту введения микрочастицы в глаз экспериментального животного. Сжатием силиконовой пневмонасадки 4 ввести воздушным потоком микрочастицу в место введения.
Проведенные многочисленные исследования на экспериментальных животных показали манипуляционный комфорт при работе с инструментом для захвата, удержания и дозированного перемещения микрочастиц, обеспечение прицельного захвата микрочастиц и их надежного удержания и прицельного перемещения.
Конструкция инструмента для захвата, удержания и дозированного перемещения микрочастиц обеспечивает захват и дозированное перемещение микрочастиц воздушным потоком, препятствует выпадению микрочастиц из инструмента и позволяет создать пневмотягу достаточной силы за счет эластичной силиконовой пневмонасадки 4.
Литература
1. Г.М. Семенов, СЗО, Современные хирургические инструменты. - СПб: Питер, 2006. - 352 с. - (Серия «Краткое руководство»). Стр.277-281.
2. Е.М. Тургунов, А.А. Нурбеков. Хирургические инструменты. - Учебное наглядное пособие. Караганда, 2008. - 24 с. Стр.10.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОХИРУРГИЧЕСКИЙ ИНЖЕКТОР ДЛЯ ВВЕДЕНИЯ МИКРОЧАСТИЦ В МИКРОСКОПИЧЕСКУЮ РАНУ НА ДОЗИРОВАННУЮ ГЛУБИНУ | 2013 |
|
RU2553514C2 |
| УНИВЕРСАЛЬНЫЙ МИКРОХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ ДЛЯ ФОРМИРОВАНИЯ МИКРОРАНЫ В РОГОВИЦЕ ГЛАЗА ЭКСПЕРИМЕНТАЛЬНОГО ЖИВОТНОГО | 2014 |
|
RU2573556C1 |
| Микрохирургическая технология введения микрочастиц в микрорану вертикального профиля роговицы глаза | 2017 |
|
RU2668472C2 |
| Микрофотовидеофиксирующее устройство | 2017 |
|
RU2667875C2 |
| ХИРУРГИЧЕСКИЙ ИНСТРУМЕНТ | 2008 |
|
RU2393793C1 |
| УСТРОЙСТВО ДЛЯ ОСТЕОПЕРФОРАЦИИ | 2011 |
|
RU2465847C1 |
| НАБОР ХИРУРГИЧЕСКИХ ИНСТРУМЕНТОВ ДЛЯ ЛЕЧЕНИЯ ЭХИНОКОККОЗА ПЕЧЕНИ И СПОСОБ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ ЭХИНОКОККОЗА ПЕЧЕНИ | 2015 |
|
RU2630356C2 |
| НАБОР ИНСТРУМЕНТАРИЯ ДЛЯ МАЛОИНВАЗИВНЫХ СОСУДИСТЫХ ОПЕРАЦИЙ | 2005 |
|
RU2306873C2 |
| СПОСОБ ЛЕЧЕНИЯ ПЕРВОЙ СТАДИИ МАКУЛЯРНОГО РАЗРЫВА БЕЗ ВИТРЭКТОМИИ И ИНСТРУМЕНТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2589660C1 |
| Инжектор для имплантации заднего послойного трансплантата роговицы | 2023 |
|
RU2803860C1 |
Изобретение относится к медицинской технике, а именно к инструментам для захвата, удержания и дозированного перемещения микрочастиц, и может быть использовано в микрохирургии при работе с микрочастицами. Инструмент состоит из корпуса и рабочего кончика, связанных конусовидным переходом. Приподнятая кверху часть рабочего кончика соединена с конусовидным переходом через коленообразующий изгиб. Приподнятая кверху часть рабочего кончика и коленообразующий изгиб имеют одинаковые внутренние диаметры, достаточные для свободного перемещения микрочастиц. На верхнюю часть корпуса надета эластичная силиконовая пневмонасадка, а сам корпус снабжен силиконовой ручкой. Использование изобретения позволяет обеспечить надежный захват, удержание и дозированное перемещение микрочастиц размером в десятые и сотые доли миллиметра. 2 ил.
Инструмент для захвата, удержания и дозированного перемещения микрочастиц, состоящий из корпуса, снабженного силиконовой ручкой и надетой на верхнюю его часть эластичной силиконовой пневмонасадкой, конусовидного перехода и рабочего кончика, причем приподнятая кверху часть рабочего кончика связана с конусовидным переходом через коленообразующий изгиб, а приподнятая кверху часть рабочего кончика и коленообразующий изгиб имеют одинаковые внутренние диаметры, достаточные для свободного перемещения микрочастиц.
| Установка для исследования кумулятивного эффекта | 1947 |
|
SU77769A1 |
| US 20110015669 A1, 20.01.2011 | |||
| 0 |
|
SU158564A1 | |
| US 2009202665 A1, 13.08.2009 | |||

