Изобретение относится к управлению системой стеклоомывателей, связанной и даже встроенной в систему стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, такой как лобовое стекло и/или заднее стекло.
В существующих в настоящее время системах стеклоомывателей, как известно, омывающая жидкость разбрызгивается только на части хода вверх и/или вниз щетки по стеклянной поверхности.
Так, ранее уже были разработаны системы стеклоомывателей, позволяющие управлять разбрызгиванием, когда рычаг или рычаги стеклоочистителя находятся в заданных угловых зонах.
Например, из документа GB 2 326 083 известно, что очистку стеклянной поверхности автотранспортного средства можно улучшить, поочередно подавая омывающую жидкость справа или слева от щетки системы стеклоочистителя в зависимости от того, перемещается щетка вниз по поверхности или вверх по поверхности, чтобы жидкость действительно орошала участок стеклянной поверхности, по которому сразу после этого должна пройти щетка стеклоочистителя.
Независимо от используемой системы, зону стеклянной поверхности, на уровне которой омывающая жидкость должна действительно разбрызгиваться в ходе цикла прохождения рычага стеклоочистителя при перемещении вверх и/или вниз, необходимо определять для каждого автотранспортного средства таким образом, чтобы создавать как можно меньше помех для водителя транспортного средства и при этом одновременно обеспечивать эффективную очистку стеклянной поверхности за счет комбинированного действия разбрызгивания жидкости и очистки щетками. Определив эту зону, необходимо иметь возможность определить моменты включения и последующей остановки разбрызгивания жидкости во время цикла очистки.
Некоторые известные способы предусматривают управление разбрызгиванием в зависимости от углового положения рычага или рычагов стеклоочистителя во время цикла очистки. Поскольку угловое положение рычага стеклоочистителя зависит, в свою очередь, от углового положения вала приводного двигателя этого рычага, эти способы предусматривают оснащение вала двигателя стеклоочистителя кулачком, связанным во вращении концентрично с этим валом и взаимодействующим с контактными щетками для подачи сигнала управления разбрызгиванием жидкости только для определенных угловых положений приводного вала.
Основным недостатком этих систем является необходимость разработки системы для каждой модели транспортного средства. Действительно, профиль кулачка и положение контактных щеток необходимо определять по каждому транспортному средству, для которого предназначена система стеклоочистителя. Поэтому такие решения являются слишком дорогими во внедрении.
Для устранения вышеуказанного недостатка в документе EP 2123525, поданном на имя заявителя, описана система стеклоомывателей, интегрированная в систему очистки стеклянной поверхности автотранспортного средства, в которой в реальном времени по каждому циклу очистки производят оценку изменений скорости рычага стеклоочистителя на стеклянной поверхности в зависимости от параметров, связанных с условиями эксплуатации транспортного средства, затем соответственно адаптируют момент включения и/или момент остановки разбрызгивания.
Однако результаты такого решения являются неудовлетворительными с точки зрения точности определения зоны разбрызгивания.
Задачей изобретения является обеспечение точной подачи омывающей жидкости в необходимое место на стеклянной поверхности.
Поставленная задача решена в способе управления системой стеклоомывателей, связанной с системой стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, при этом указанная система стеклоочистителя содержит двигатель стеклоочистителя для приведения во вращение, по меньшей мере, одного рычага стеклоочистителя, и система стеклоомывателей содержит резервуар жидкости, связанный, по меньшей мере, с одним жиклером, выполненным с возможностью подачи в ходе цикла очистки, по меньшей мере, одной струи жидкости в течение, по меньшей мере, первого периода активации системы стеклоомывателей, ограниченного между моментом включения разбрызгивания жидкости и моментом остановки разбрызгивания жидкости, каждый из которых определяют в зависимости соответственно от первого углового положения и от второго углового положения рычага стеклоочистителя, определяющих первый угловой сектор, в котором разбрызгивание жидкости происходит непрерывно, при этом способ отличается тем, что момент включения разбрызгивания смещают на компенсационное время, соответствующее, по меньшей мере, времени прохождения жидкости из резервуара в жиклер.
Таким образом, можно избежать временных задержек системы, связанных с инерцией омывающей жидкости и с гидравлической архитектурой системы стеклоомывателей.
Поскольку недостаточная точность может быть также связана с временем электрической/электронной обработки, то предпочтительно можно предусмотреть, чтобы компенсационное время зависело также от этой задержки обработки.
В предпочтительном варианте осуществления учитывают также условия эксплуатации транспортного средства, такие как наружная температура, скорость транспортного средства, наличие дождя или снега или степень загрязнения на стеклянной поверхности, чтобы корректировать, то есть увеличивать или уменьшать компенсационное время.
В рамках этого предпочтительного варианта осуществления способ управления может также содержать по каждому циклу очистки оценку в реальном времени изменения скорости рычага стеклоочистителя на стеклянной поверхности в зависимости от параметров, связанных с условиями эксплуатации транспортного средства, и определение указанного компенсационного времени также в зависимости от оценочных изменений скорости.
Поставленная задача решена также в модуле для управления системой стеклоомывателей, связанной с системой стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, при этом указанная система стеклоочистителя содержит двигатель стеклоочистителя для приведения во вращение, по меньшей мере, одного рычага стеклоочистителя, а система стеклоомывателей содержит, по меньшей мере, один резервуар жидкости и насос, выполненный с возможностью соединения с резервуаром жидкости и, по меньшей мере, с одним жиклером, при этом указанным насосом управляет командный сигнал таким образом, чтобы он выдавал в ходе цикла очистки, по меньшей мере, одну струю жидкости в течение, по меньшей мере, первого периода активации системы стеклоомывателей, ограниченного между моментом включения разбрызгивания жидкости и моментом остановки разбрызгивания жидкости, каждый из которых определяют в зависимости соответственно от первого углового положения и от второго углового положения рычага стеклоочистителя, определяющих первый угловой сектор, в котором разбрызгивание жидкости происходит непрерывно, при этом согласно изобретению модуль содержит средства смещения момента включения разбрызгивания на компенсационное время, соответствующее, по меньшей мере, времени прохождения жидкости из резервуара в жиклер.
Наконец, поставленная задача решена в системе стеклоочистителя, содержащей вышеуказанный модуль управления.
Изобретение и его преимущества будут более очевидны из нижеследующего описания неограничивающего примера осуществления системы стеклоомывателей, связанной с системой стеклоочистителя, со ссылками на прилагаемые чертежи, на которых:
На фиг.1 представлена упрощенная блок-схема системы стеклоомывателей, связанной с системой стеклоочистителя, согласно возможному варианту осуществления изобретения;
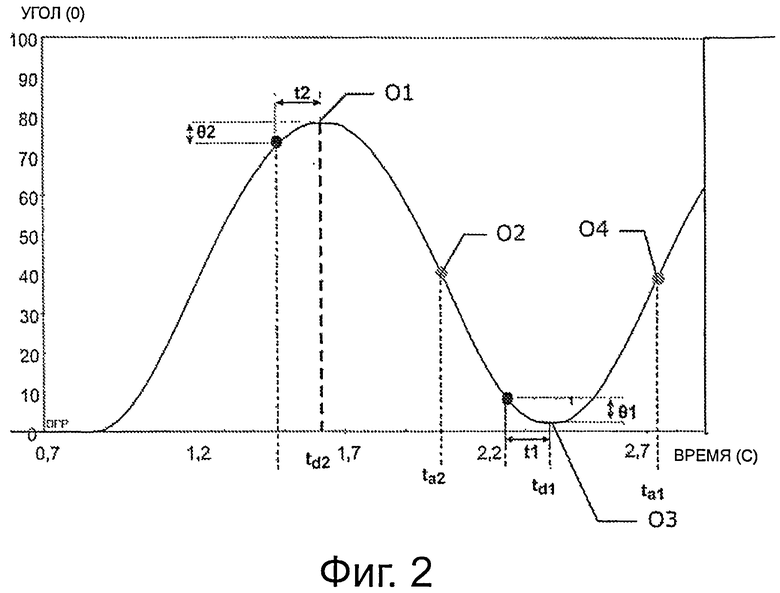
на фиг.2 показан принцип управления в соответствии с изобретением в виде временного графика за один цикл очистки.
На фиг.1 в виде упрощенной блок-схемы показаны некоторые элементы системы стеклоочистителя, оборудованной встроенной системой стеклоомывателей, а также различные линии связи с различными элементами, включенными или не включенными в систему стеклоочистителя, позволяющие осуществлять способ управления системой стеклоомывателей в соответствии с изобретением.
В частности, система для осуществления способа управления в соответствии с изобретением, содержит:
- первую часть элементов, предназначенную для работы системы стеклоочистителя и показанную схематично в виде подсистемы, обозначенной позицией 1;
- вторую часть элементов, предназначенную для работы системы стеклоомывателей и показанную схематично в виде подсистемы, обозначенной позицией 2;
- факультативно: различные элементы, такие как датчик 3 дождя, датчик 4 скорости транспортного средства, датчик 5 степени загрязнения стеклянной поверхности или датчик 6 наружной температуры, в случае необходимости, гигрометрический датчик (не показан), причем эти различные элементы не обязательно входят в состав собственно системы 1 стеклоочистителя или системы 2 стеклоомывателей.
Первая часть 1, предназначенная для работы системы стеклоочистителя классически содержит двигатель 10 стеклоочистителя, позволяющий приводить в возвратно-вращательное движение, по меньшей мере, один рычаг стеклоочистителя (не показан). Двигатель 10 стеклоочистителя может быть, например, одностороннего действия, и возвратно-вращательное движение рычага стеклоочистителя может быть классически обеспечено благодаря не показанному механизму соединения, называемому рычажным приводом, между приводным валом двигателя и рычагом стеклоочистителя. Управление двигателем стеклоочистителя может быть либо ручным, например, посредством активации переключателя 11 водителем, либо автоматическим, например, в результате обнаружения дождя датчиком 3 дождя. В обоих случаях управление двигателем предусматривает его вращение, по меньшей мере, на двух скоростях вращения: на малой скорости VMin и на большой скорости VMax. Как правило, малая скорость соответствует 45 циклам очистки в минуту, тогда как большая скорость соответствует 60 циклам очистки в минуту. В большинстве систем имеется также прерывистый режим, который может быть связан с малой скоростью вращения.
Что касается второй части, связанной с работой системы стеклоомывателей, указанная система содержит в данном случае, например, но не ограничительно два жиклера или два ряда жиклеров 20, расположенных или не расположенных в рампе на рычаге стеклоочистителя или на уровне щетки. Таким образом, система стеклоомывателей встроена в систему стеклоочистителя, и жиклеры следуют движению рычага стеклоочистителя во время цикля очистки. Оба жиклера или ряд жиклеров 20 расположены на рычаге или на щетке таким образом, чтобы две струи жидкости можно было направлять с двух сторон от щетки. В эти два жиклера или ряд жиклеров 20 поступает омывающая жидкость, содержащаяся в резервуаре 21, через насос 22 двухстороннего действия, при этом один жиклер или ряд жиклеров создают одну или несколько струй на данном участке прохождения рычага. Направление вращения насоса необходимо определять таким образом, чтобы струя была всегда направлена спереди щетки по отношению к направлению прохождения рычага стеклоочистителя. Таким образом, на половине цикла очистки, соответствующей перемещению рычага из его положения, называемого фиксированной остановкой, в его положение вверху стеклянной поверхности, называемое положением, противоположным фиксированной остановке, струя будет направлена с первой стороны. На другой половине цикла очистки, соответствующей перемещению рычага из его положения, противоположного фиксированной остановке, в его положение фиксированной остановки, направление вращения насоса 22 должно поменяться на противоположное, чтобы обеспечить направление струи с другой стороны щетки. В первом варианте насос двухстороннего действия можно заменить двумя насосами, каждый из которых связан с одним из двух жиклеров и которые работают поочередно. Во втором варианте насос двухстороннего действия можно заменить единственным насосом и распределителем с двумя выходами, каждый из которых связан с одним из двух жиклеров и которые приводятся в действие поочередно.
На практике активация системы стеклоомывателей происходит так же, как и активация системы стеклоочистителя, то есть либо вручную посредством включения конкретной команды на переключателе 11, либо автоматически при обнаружении атмосферных осадков.
В такой системе предпочтительно подача команды на разбрызгивание производится во время первого периода активации, который происходит во время фазы подъема рычага стеклоочистителя на стеклянной поверхности, и во время второго периода активации системы стеклоомывателей, который происходит во время фазы опускания рычага стеклоочистителя на стеклянной поверхности.
Как было указано выше, важно активировать разбрызгивание, когда рычаг стеклоочистителя проходит через строго определенную зону стеклянной поверхности.
На фиг.2 показан пример изменения во времени углового положения рычага стеклоочистителя за цикл очистки. В данном случае предполагается, что скорость рычага является постоянной и соответствует скорости, выбранной пользователем, чем объясняется периодичный характер кривой. В этом примере первый период активации системы стеклоомывателей ограничен между моментом td1 включения разбрызгивания жидкости и моментом ta1 остановки разбрызгивания жидкости, причем каждый из этих моментов классически определяют в зависимости соответственно от первого углового положения и от второго углового положения рычага, определяющих первый угловой сектор, меняющийся в данном примере приблизительно между 0° (соответствует так называемому положению фиксированной остановки) и 40°. Точно так же, второй период активации системы стеклоомывателей ограничен между моментом td2 включения разбрызгивания жидкости и моментом ta2 остановки разбрызгивания жидкости, причем каждый из этих моментов классически определяют в зависимости соответственно от третьего углового положения и от четвертого углового положения рычага стеклоочистителя, определяющих второй угловой сектор, меняющийся в данном примере приблизительно между 80° (соответствует так называемому положению, противоположному фиксированной остановке) и 40°.
Исключительной точности достигают, если ограниченные таким образом периоды активации гарантированно точно соответствуют периодам действительного и непрерывного разбрызгивания омывающей жидкости.
Однако известные до сих пор системы обеспечивали непрерывное разбрызгивание только в пределах периодов активации, но не гарантировали действительного разбрызгивания, начиная с моментов td1 или td2.
Это обусловлено, в частности, наличием характерной задержки, связанной с гидравлической архитектурой системы стеклоомывателей и с инерцией жидкости.
Предпочтительно изобретение предусматривает смещение момента включения разбрызгивания на компенсационное время, соответствующее, по меньшей мере, времени прохождения жидкости из резервуара 21 в жиклер 20. Для этого модуль управления содержит средства 23, как правило, представляющие собой электронику управления, выполненную с возможностью применения компенсационного времени к моменту включения.
Поскольку это время прохождения зависит от архитектуры, его можно определить заранее путем экспериментальных испытаний, позволяющих определить среднее время между моментом, когда насос 22 принимает командный сигнал SCOM, управляющий его активацией, и моментом, когда омывающая жидкость действительно выходит из жиклера или жиклеров 20. Время прохождения является заранее определенным фиксированным временем и сохранено в памяти 24 модуля управления, связанной со средствами 23 управления.
Кроме того, компенсационное время может также зависеть от задержки электрической обработки, характерной для самой системы стеклоомывателей. Как и задержку, связанную с гидравлической архитектурой, задержку электрической обработки можно заранее измерить для каждой системы.
На фиг.2 t1 и t2 обозначают значения компенсационного времени, применяемые соответственно для фаз подъема и опускания цикла очистки. При этом установлено, что компенсацию наиболее оптимально можно применить только, начиная с первой фазы опускания. Тем не менее, начиная с первой фазы опускания, гарантированно обеспечивают разбрызгивание в искомой точке O1 на оси абсцисс в момент td2. Точно так же, начиная со следующей фазы подъема, гарантированно обеспечивают только первую фазу подъема и гарантированно обеспечивают разбрызгивание в искомой точке О3 на оси абсцисс в момент td1.
Следует отметить, что система и даже сам двигатель, если используют электронный двигатель, очень точно знает свое угловое положение в любой момент цикла. Как показано на фиг.2, совершенно одинаково можно считать, что момент включения (td1, td2) будет смещен на компенсационное время (соответственно t1, t2), или считать, что угловые положения, занимаемые двигателем в моменты включения (td1, td2), будут изменены на соответствующее угловое положение (соответственно θ1, θ2).
Иначе говоря, момент включения может быть смещен посредством подачи команды на активацию системы стеклоомывателей в момент, соответствующий моменту включения (соответственно td1, td2), минус указанное компенсационное время (соответственно t1, t2).
В варианте момент включения смещают посредством подачи команды на активацию системы стеклоомывателей в угловом положении рычага стеклоочистителя, соответствующем первому угловому положению, соответственно третьему угловому положению, с поправкой на угловое значение, соответственно θ1, θ2, соответствующее угловому перемещению рычага стеклоочистителя в течение времени, соответствующего указанному компенсационному времени (соответственно t1 или t2).
Кроме того, следует отметить, что обе скорости VMin и VMax двигателя стеклоочистителя являются теоретическими скоростями, которые на практике встречаются только в особых условиях эксплуатации транспортного средства (транспортное средство стоит на месте и защищено от погодных факторов, стеклянная поверхность является чистой).
На практике, время, которое тратит рычаг стеклоочистителя для действительного прихода в зону разбрызгивания, не будет зависеть только от скорости VMin или VMax двигателя стеклоочистителя, а будет также зависеть от условий эксплуатации транспортного средства.
Так, если транспортное средство стоит на месте, скорость рычага стеклоочистителя в фазе подъема рычага будет идентичной скорости рычага стеклоочистителя в фазе опускания рычага. Если же транспортное средство движется на высокой скорости, рычаг, работающий на очистку лобового стекла, будет перемещаться намного быстрее в фазе подъема, чем в фазе опускания. Это же происходит, если относительная скорость, влияющая на систему рычаг-щетка, является высокой из-за скорости ветра, которая добавляется к скорости транспортного средства.
Точно так же, рычаг стеклоочистителя перемещается с разной скоростью в зависимости от того, является ли стеклянная поверхность сухой или влажной, чистой или грязной.
Поэтому, согласно предпочтительному варианту осуществления изобретения, компенсационное время t1, t2 корректируют также в зависимости от изменений скорости рычага стеклоочистителя на стеклянной поверхности, оцениваемых в реальном времени по каждому циклу очистки на основании параметров, связанных с условиями эксплуатации транспортного средства.
Для этого средства 23 выполнены с возможностью приема данных о различных параметрах, связанных с условиями эксплуатации транспортного средства, чтобы в реальном времени по каждому циклу очистки производить оценку изменений скорости рычага стеклоочистителя на стеклянной поверхности в зависимости от этих параметров. На основании этих параметров средства 23 могут корректировать в реальном времени каждое компенсационное время t1 и t2 в зависимости от оценочных изменений скорости и формировать командный сигнал SCOM управления насосом 22 в нужные моменты.
Изменения скорости рычага стеклоочистителя можно оценивать на основании информации о выбранной теоретической скорости (VMin или VMax) очистки системы стеклоочистителя и информации о скорости транспортного средства. Информация о теоретической скорости может поступать от переключателя 11 или датчика дождя 3, когда он автоматически включает очистку и одновременно включает систему стеклоомывателей. В варианте эта информация может поступать от выхода двигателя стеклоочистителя, с которым связаны вычислительные средства 23. Кроме того, как схематично показано на фигуре, электроника 23 управления может быть связана с выходом датчика 4, выдающего на вычислительные средства 23 информацию V о скорости транспортного средства. Так, если скорость V транспортного средства является высокой, следует отдельно корректировать значения компенсационного времени t1 и t2, как правило, сокращая компенсационное время t1 фаз подъема и увеличивая компенсационное время t2 фаз опускания.
В дополнение или как вариант изменения скорости рычага стеклоочистителя можно оценивать на основании измерения температуры снаружи транспортного средства и, в случае необходимости, измерения гигрометрического датчика. Действительно, такая информация позволяет сделать вывод о сухом или влажном состоянии стеклянной поверхности и соответственно корректировать значения компенсационного времени. Для этого модуль управления можно соединить с выходом датчика 6, выдающим на вычислительные средства 23 информацию Т о температуре транспортного средства.
Информацию о сухом или влажном состоянии стеклянной поверхности можно также получить от датчика 3 дождя. Соответственно, изменения скорости рычага стеклоочистителя можно также оценить на основании информации, касающейся обнаружения атмосферных осадков, предусмотрев соединение модуля управления с выходом датчика 3, выдающим на вычислительные средства 23 информацию об обнаружении дождя.
В варианте или в комбинации, можно также предусмотреть использование информации D2, связанной со степенью загрязнения стеклянной поверхности, поступающей в вычислительные средства 23 от выхода датчика 5 загрязнения стеклянной поверхности. Таким образом, если стекло является очень грязным, скорость очистки будет меньше выбранной теоретической скорости. В этом случае следует уменьшить продолжительность компенсационного времени t1 и t2 для фаз подъема и опускания, по меньшей мере, в течение определенного числа циклов.
В варианте или в комбинации, можно также предусмотреть измерение усилий, действующих на ось двигателя стеклоочистителя, чтобы оценить потребление энергии этим двигателем 10. В этом случае вычислительные средства 23 получают эту информацию от средства 12 измерения потребления энергии двигателем стеклоочистителя.
Можно легко понять, что в зависимости от типов датчиков, которыми оборудовано транспортное средство, можно вводить разные поправки для значений компенсационного времени, при этом некоторые из них предназначены для увеличения, а другие для уменьшения компенсационного времени, при этом все поправки суммируют по относительной величине для получения оптимизированных значений компенсационного времени. Значения поправок, вводимых в каждом из этих случаев, можно установить экспериментально и сохранить в системе в виде таблиц.
Вместо различных вышеперечисленных датчиков можно предусмотреть использование двигателя стеклоочистителя электронного типа. Действительно, в этом случае сам двигатель может в любой момент вычислять изменения скорости от одного цикла к другому и даже в ходе одного цикла и выдавать эту информацию на средства 23 для введения поправки в компенсационное время.
Не выходя за рамки изобретения, можно предусмотреть также другие альтернативные варианты:
Так, изобретение можно применять для системы стеклоочистителя со встроенной системой стеклоомывателей, в которой жиклер или жиклеры расположены таким образом, чтобы разбрызгивание можно было производить только в фазе подъема или в фазе опускания рычага за один цикл очистки, или с системой стеклоомывателей, в которой жиклер или жиклеры располагают неподвижно на капоте транспортного средства. Кроме того, в этом случае не имеет значения, происходит ли разбрызгивание жидкости спереди или сзади щетки по отношению траектории щетки во время очистки.
Кроме того, электроника 23 управления, показанная на фиг.1, входит в состав системы стеклоомывателей. Однако эту электронику можно также расположить на уровне системы стеклоочистителя или даже на уровне электроники двигателя стеклоочистителя, в случае использования двигателя электронного типа.
Группа изобретений относится к способу управления системой стеклоомывателей, системе стеклоочистителя для очистки стеклянной поверхности автотранспортного средства и модулю управления этой системой. Система стеклоочистителя содержит двигатель стеклоочистителя для приведения во вращение, по меньшей мере, один рычаг стеклоочистителя. Система стеклоомывателей содержит резервуар жидкости, связанный, по меньшей мере, с одним жиклером, выполненным с возможностью подачи в ходе цикла очистки, по меньшей мере, одной струи жидкости в течение, по меньшей мере, первого периода активации системы стеклоомывателей, ограниченного между моментом (td1) включения разбрызгивания жидкости и моментом (ta1) остановки разбрызгивания жидкости, каждый из которых определяют в зависимости соответственно от первого углового положения и от второго углового положения рычага стеклоочистителя, определяющих первый угловой сектор, в котором разбрызгивание жидкости происходит непрерывно. Момент (td1) включения разбрызгивания смещают на компенсационное время (t1), соответствующее, по меньшей мере, времени прохождения жидкости из резервуара в жиклер. Обеспечивается точная подача омывающей жидкости в необходимое место на стеклянной поверхности. 3 н. и 14 з.п. ф-лы, 2 ил.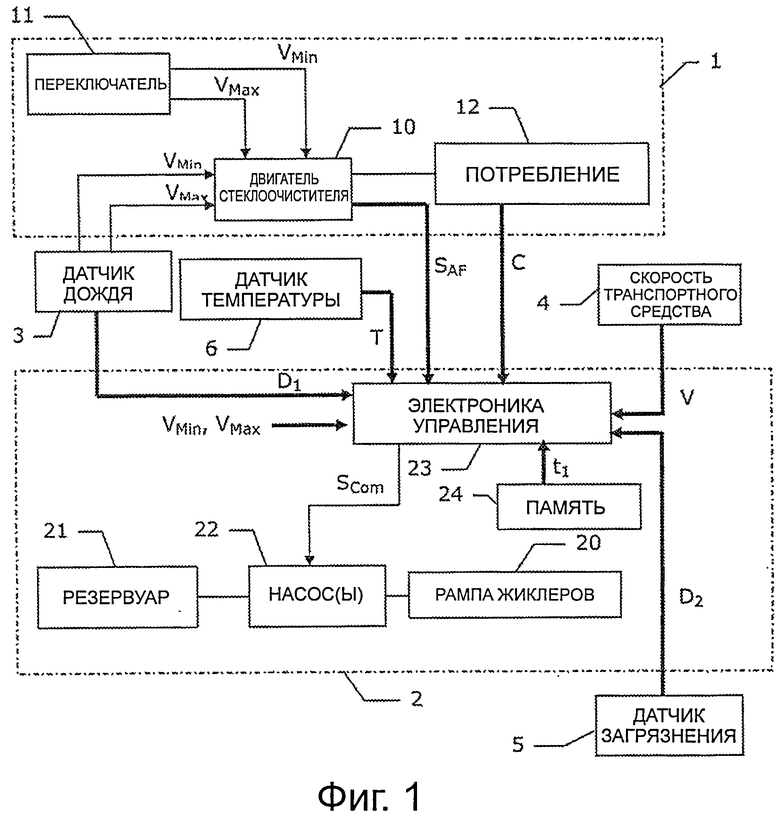
1. Способ управления системой стеклоомывателей, связанной с системой стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, при этом указанная система стеклоочистителя содержит двигатель (10) стеклоочистителя для приведения во вращение, по меньшей мере, одного рычага стеклоочистителя, а система стеклоомывателей содержит резервуар (21) жидкости, связанный, по меньшей мере, с одним жиклером (20), выполненным с возможностью подачи в ходе цикла очистки, по меньшей мере, одной струи жидкости в течение, по меньшей мере, первого периода активации системы стеклоомывателей, ограниченного между моментом (td1) включения разбрызгивания жидкости и моментом (ta1) остановки разбрызгивания жидкости, каждый из которых определяют в зависимости соответственно от первого углового положения и от второго углового положения рычага стеклоочистителя, определяющих первый угловой сектор, в котором разбрызгивание жидкости происходит непрерывно, при этом способ отличается тем, что момент (td1) включения разбрызгивания смещают на компенсационное время (t1), соответствующее, по меньшей мере, времени прохождения жидкости из резервуара (21) в жиклер (20).
2. Способ управления по п.1, отличающийся тем, что момент включения смещают, подавая команду на активацию системы стеклоомывателей в момент, соответствующий указанному моменту (td1) включения минус указанное компенсационное время (t1).
3. Способ управления по п.1, отличающийся тем, что момент включения смещают, подавая команду на активацию системы стеклоомывателей в угловом положении рычага стеклоочистителя, соответствующем указанному первому угловому положению, с поправкой на угловое значение, соответствующее угловому перемещению рычага стеклоочистителя за время, соответствующее указанному компенсационному времени (t1).
4. Способ управления по любому из пп.1-3, отличающийся тем, что время прохождения жидкости является заранее определенным фиксированным временем.
5. Способ управления по любому из пп.1-3, отличающийся тем, что компенсационное время (t1) зависит также от запаздывания электрической обработки, свойственной системе стеклоомывателей.
6. Способ управления по п.1, отличающийся тем, что по каждому циклу очистки дополнительно содержит оценку в реальном времени изменения скорости рычага стеклоочистителя на стеклянной поверхности в зависимости от параметров, связанных с условиями эксплуатации транспортного средства, при этом указанное компенсационное время (t1) зависит также от оценочных изменений скорости.
7. Способ управления по п.6, отличающийся тем, что оценку изменений скорости рычага стеклоочистителя производят на основании информации о выбранной теоретической скорости (VMin, VMax) очистки системы стеклоочистителя и информации (V) о скорости транспортного средства.
8. Способ управления по п.6 или 7, отличающийся тем, что оценку изменений скорости рычага стеклоочистителя производят на основании измерения температуры (Т) снаружи транспортного средства, и/или на основании информации (D1) об обнаружении дождя, и/или на основании информации (D2) о степени загрязнения стеклянной поверхности, и/или на основании информации (С) о потреблении энергии двигателем (10) стеклоочистителя.
9. Способ управления по п.6, отличающийся тем, что двигатель является электронным двигателем и оценку скорости рычага стеклоочистителя производят на основании значений изменений скорости, выдаваемых двигателем.
10. Способ управления по любому из пп.1-3, 6, 7, 9, отличающийся тем, что указанный первый период активации происходит во время фазы подъема рычага стеклоочистителя на стеклянной поверхности.
11. Способ управления по п.10, отличающийся тем, что момент включения системы стеклоочистителя определяют на основании информации (SAF) о положении фиксированной остановки, выдаваемой двигателем (10) стеклоочистителя.
12. Способ управления по любому из пп.1-3, 6, 7, 9, 11, отличающийся тем, что указанный жиклер расположен на указанном рычаге стеклоочистителя или на щетке.
13. Способ управления по п.8, отличающийся тем, что система стеклоомывателей содержит, по меньшей мере, один дополнительный жиклер, расположенный на указанном рычаге стеклоочистителя или на щетке и выполненный с возможностью подачи за цикл очистки, по меньшей мере, одной струи жидкости во время второго периода активации системы стеклоомывателей, соответствующего фазе опускания рычага стеклоочистителя на стеклянной поверхности, при этом момент (td2) включения и момент (ta2) остановки разбрызгивания, соответствующие указанному второму периоду активации, определяют, каждый, в зависимости соответственно от третьего углового положения и от четвертого углового положения рычага стеклоочистителя, определяющих второй угловой сектор, в котором разбрызгивание жидкости является непрерывным, при этом момент (td2) включения разбрызгивания тоже смещают на значение, равное указанному компенсационному времени.
14. Модуль для управления системой стеклоомывателей, связанной с системой стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, при этом указанная система стеклоочистителя содержит двигатель (10) стеклоочистителя для приведения во вращение, по меньшей мере, одного рычага стеклоочистителя, а система стеклоомывателей содержит, по меньшей мере, один резервуар (21) жидкости и насос (22), выполненный с возможностью соединения с резервуаром (21) омывающей жидкости и, по меньшей мере, с одним жиклером (20), при этом указанным насосом управляет командный сигнал (SCOM) так, чтобы он выдавал в ходе цикла очистки, по меньшей мере, одну струю жидкости в течение, по меньшей мере, первого периода активации системы стеклоомывателей, ограниченного между моментом включения разбрызгивания жидкости и моментом остановки разбрызгивания жидкости, каждый из которых определен в зависимости соответственно от первого углового положения и от второго углового положения рычага стеклоочистителя, определяющих первый угловой сектор, в котором разбрызгивание жидкости происходит непрерывно, отличающийся тем, что содержит средства (23) смещения момента включения разбрызгивания на компенсационное время, соответствующее, по меньшей мере, времени прохождения жидкости из резервуара (21) в жиклер (20).
15. Модуль управления по п.14, отличающийся тем, что выполнен с возможностью соединения с выходом двигателя (10) стеклоочистителя, выдающего в вычислительные средства (23) информацию о теоретической скорости (VMin, VMax) двигателя (10) стеклоочистителя, и с выходом датчика (4) скорости транспортного средства, выдающего в вычислительные средства (23) информацию о скорости (V) транспортного средства.
16. Модуль управления по п.15, отличающийся тем, что дополнительно выполнен с возможностью соединения с выходом датчика (3) дождя, выдающего в средства (23) информацию (D1) об обнаружении дождя, и/или датчика (5) загрязнения стеклянной поверхности, выдающего в вычислительные средства (23) информацию (D2) о степени загрязнения стеклянной поверхности, и/или датчика (6) температуры, выдающего в вычислительные средства (23) информацию (Т) о температуре снаружи транспортного средства, и/или средства (12) измерения, выдающего в вычислительные средства (23) информацию (C) о потреблении энергии двигателем (10) стеклоочистителя, причем средства (23) выполнены с возможностью осуществления по каждому циклу очистки в реальном времени оценки изменения скорости рычага стеклоочистителя на стеклянной поверхности в зависимости от сигналов, полученных от датчиков, и с возможностью коррекции указанного компенсационного времени в зависимости от оценочных изменений скорости.
17. Система стеклоочистителя для очистки стеклянной поверхности автотранспортного средства, отличающаяся тем, что содержит модуль управления по любому из пп.14-16.
| УСТАНОВКА ДЛЯ ПРОИЗВОДСТВА БИОПРОДУКТА | 1997 |
|
RU2123525C1 |
| FR 2931118 A1, 20.11.2009 | |||
| DE 3612620 C1, 02.07.1987 | |||
| DE 102008024357 A1, 26.11.2009 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИСТЕМОЙ ОЧИСТКИ ВЕТРОВОГО СТЕКЛА В АВТОМОБИЛЕ | 1995 |
|
RU2145554C1 |

