Область техники
Изобретение относится к области космонавтики, к системам траекторных измерений космических аппаратов (КА).
Уровень техники
В общем случае для определения траектории движения КА необходимо одновременно измерять шесть независимых параметров движения КА: наклонную дальность от наземной станции слежения (СС) до КА (R), радиальную составляющую скорости движения КА относительно СС  , угол места КА (β) и скорость изменения этого угла
, угол места КА (β) и скорость изменения этого угла 

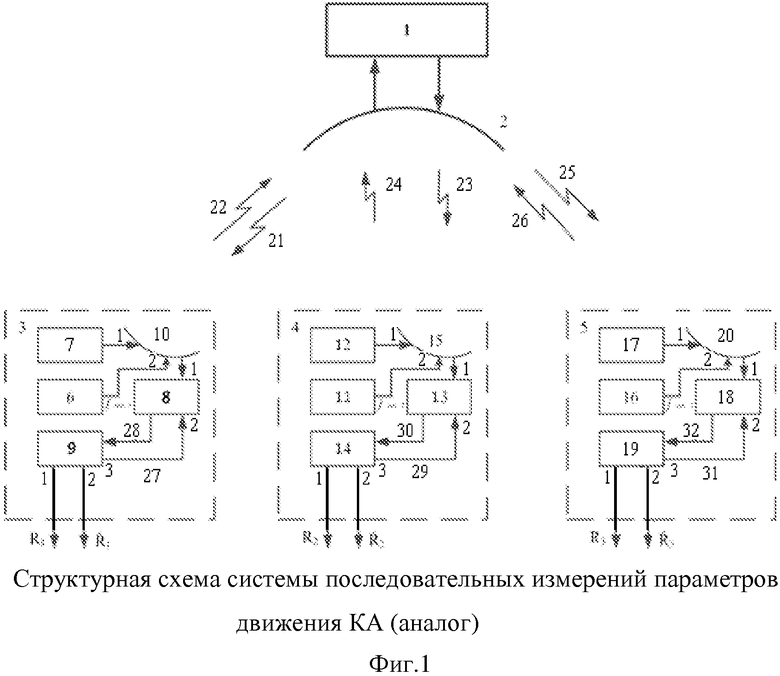
Известно [1], что для определения траектории движения орбитальных и межпланетных КА и прогноза их дальнейшего движения используются результаты траекторных измерений, проводимых несколькими СС (3,4,5) и бортовым приемоответчиком КА(1) в системе последовательных измерений параметров движения КА (см. Фиг.1). Для определения точки стояния геостационарных КА [2] используются результаты траекторных измерений, проводимые одновременно станцией слежения (измерения R,  ) и фазовым пеленгатором (измерения α, β,
) и фазовым пеленгатором (измерения α, β, 

На практике при проведении траекторных измерений орбитальных КА используют измерение только двух параметров движения КА - R и , которые последовательно измеряются несколькими СС (3,4,5), территориально разнесенными в широтном и долготном направлениях.
Результаты измерений со всех станций слежения (3,4,5) передаются в Баллистический центр (25), где по ним определяются траектория и прогноз дальнейшего движения КА.
При такой схеме измерений в большинстве случаев погрешности определения траектории движения КА оказываются в пределах, достаточных для решения задач управления КА. При этом для расчета траектории используются шесть параметров движения, измеряемых последовательно несколькими СС: R1, 1 - измеряемыми СС1 (6,7,8,9,10), R2,
2 - измеряемыми СС2 (11,12,13,14,15) и R3,
3 - измеряемыми СС3 (16,17,18,19,20) (см. фиг. 1). Так как измерения указанных параметров производятся в разное время, это приходится учитывать при расчете траектории движения КА, что приводит к увеличению погрешностей определения траектории КА. Это является одним из недостатков указанного способа траекторных измерений КА.
1 - измеряемыми СС1 (6,7,8,9,10), R2,
2 - измеряемыми СС2 (11,12,13,14,15) и R3,
3 - измеряемыми СС3 (16,17,18,19,20) (см. фиг. 1). Так как измерения указанных параметров производятся в разное время, это приходится учитывать при расчете траектории движения КА, что приводит к увеличению погрешностей определения траектории КА. Это является одним из недостатков указанного способа траекторных измерений КА.
Кроме этого, так как в процессе траекторных измерений участвуют несколько СС, это приводит к большим расходам на создание и эксплуатацию участвующих в траекторных измерениях СС.
Раскрытие изобретения
Заявленные способ одновременного определения шести параметров движения КА при проведении траекторных измерений одной станцией слежения и система для его реализации направлены на устранение недостатков аналога.
Технический результат заявляемого изобретения заключается в одновременном измерении шести параметров движения КА при проведении траекторных измерений одной станцией слежения, что приводит к уменьшению погрешностей определения траектории КА.
Технический результат достигается тем, что способ одновременного определения шести параметров движения КА при проведении траекторных измерений одной станцией слежения (СС), заключающийся в том, что формируют запросный сигнал станции слежения (СС), измеряющей шесть параметров движения КА, передают через основную антенну СС сигнал на антенну КА, формируют ответный сигнал на КА, одновременно передают его на основную, первую и вторую дополнительные антенны СС, измеряющей шесть параметров движения КА, измеряют дальность R и радиальную составляющую скорости КА, и с помощью сигналов, принятых основной, первой и второй дополнительных антенн в блоке интерферометрических измерений, производят угломерные измерения 






Система одновременного определения шести параметров движения КА при проведении траекторных измерений одной станцией слежения (СС) включает в себя космический аппарат (КА), антенну КА, СС, измеряющую шесть параметров движения КА, включающую в себя основную, первую и вторую дополнительные антенны, основной, первый и второй коммутаторы, входы/выходы которых соединены с входами/выходами основной, первой и второй антенн соответственно, передатчик СС, выход которого соединен с основной антенной через второй вход основного коммутатора, первый, второй и третий блоки синхронного наведения антенны, систему автосопровождения основной антенны СС, вход/выход основной антенны соединен с входом системы автосопровождения основной антенны СС, система автосопровождения основной антенны СС соединена через первый вход основного коммутатора и первый выход основного коммутатора с входом второго блока синхронного наведения антенны, выход первого блока синхронного наведения антенны соединен с входом/выходом первой антенны через первый коммутатор, выход третьего блока синхронного наведения антенны соединен с входом/выходом второй антенны через второй коммутатор, первое, второе и третье приемные устройства, второй вход первого приемного устройства соединен с входом/выходом первой антенны через второй выход первого коммутатора, второй вход второго приемного устройства соединен с входом/выходом основной антенны через второй выход основного коммутатора, второй вход третьего приемного устройства соединен с входом/выходом второй антенны через второй выход второго коммутатора, систему траекторных измерений, первый выход которой соединен со входом передатчика СС, второй выход соединен с первыми входами первого, второго и третьего приемных устройств соответственно, блок интерферометрических измерений, первый и третий входы которого соединены с выходами первого и третьего приемных устройств соответственно, а второй вход с первым выходом второго приемного устройства, первый, второй и третий блоки раскрытия неоднозначности угломерных измерений, вход первого блока раскрытия неоднозначности угломерных измерений соединен с входом/выходом основной антенны через третий выход основного коммутатора, входы второго и третьего блоков раскрытия неоднозначности угломерных соединены с входами/выходами первой и второй антенн через первые выходы первого и второго коммутаторов, соответственно, а выходы первого, второго и третьего блоков раскрытия неоднозначности угломерных измерений соединены с первым, вторым и третьим входами блока интерферометрических измерений, выход блока интерферометрических измерений соединен с первым входом системы траекторных измерений, второй вход системы траекторных измерений соединен с вторым выходом второго приемного устройства, третий и четвертый выходы системы траекторных измерений являются выходами системы одновременного определения шести параметров движения КА при проведении траекторных измерений одной станцией слежения.
Краткое описание чертежей
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, где показано следующее.
На фиг. 1 - структурная схема системы последовательных измерений параметров движения КА (аналог), где:
1. Космический аппарат (КА);
2. Антенна КА;
3. Первая станция слежения (СС1);
4. Вторая СС2;
5. Третья СС3;
6. Передатчик СС1;
7. Аппаратура синхронного наведения антенны СС1;
8. Приемное устройство СС1;
9. Система траекторных измерений СС1;
10. Антенна СС1;
11. Передатчик СС2;
12. Аппаратура синхронного наведения антенны СС1;
13. Приемное устройство СС2;
14. Система траекторных измерений СС2;
15. Антенна СС2;
16. Передатчик СС3;
17. Аппаратура синхронного наведения антенны СС3;
18. Приемное устройство СС3;
19. Система траекторных измерений СС3;
20. Антенна СС3;
22. Ответный сигнал СС1;
21. Запросный сигнал СС1;
24. Запросный сигнал СС2;
23. Ответный сигнал СС2;
25. Ответный сигнал СС3;
26. Запросный сигнал СС3;
27. Сигнал гетеродина СС1;
28. Сигналы управления КА, принимаемые антенной СС1;
29. Сигнал гетеродина СС2;
30. Сигналы управления КА, принимаемые антенной СС2;
31. Сигнал гетеродина СС3;
32. Сигналы управления КА, принимаемые антенной СС3.
На фиг. 2 представлена структурная схема заявленной системы одновременного определения шести параметров движения КА при проведении траекторных измерений одной станцией слежения, где:
33. Космический аппарат (КА);
34. Антенна КА;
35. Станция слежения (СС), измеряющая шесть параметров движения КА;
36. Передатчик СС;
37. Первый блок синхронного наведения антенны;
38. Второй блок синхронного наведения антенны;
39. Третий блок синхронного наведения антенны;
40. Первое приемное устройство;
41. Второе приемное устройство;
42. Третье приемное устройство;
43. Система траекторных измерений;
44. Основная антенна СС;
45. Первая антенна СС;
46. Вторая антенна СС;
47. Основной коммутатор;
48. Первый коммутатор;
49. Второй коммутатор;
50. Интерферометрические сигналы, принимаемые антеннами;
51. Блок интерферометрических измерений;
52. Сигнал гетеродина;
53. Сигналы управления КА, принимаемые антеннами;
54. Результаты угловых измерений;
55. Широтная база;
56. Долготная база;
57. Блок автосопровождения основной антенны СС;
58. Первый блок приема сигнала раскрытия неоднозначности угломерных измерений;
59. Второй блок приема сигнала раскрытия неоднозначности угломерных измерений;
60. Третий блок приема сигнала раскрытия неоднозначности угломерных измерений;
61. Сигнал для раскрытия неоднозначности угломерных измерений блока интерферометрических измерений;
62. Запросный сигнал СС;
63. Ответный сигнал СС.
Осуществление изобретения
Система одновременного определения шести параметров движения КА при проведении траекторных измерений предусматривает использование только одной СС (35), аналогичной используемым в системе, являющейся аналогом, но отличающейся следующим:
- в состав СС дополнительно введены две антенны меньшего размера (45, 46) с приемными устройствами (40, 42), располагающимися на определенном расстоянии от основной антенны СС (44) в широтном и долготном направлениях таким образом, что с основной антенной (44) они образуют широтную (55) и долготную (56) базы радиоинтерферометрических измерений;
- в состав СС дополнительно введен блок интерферометрических измерений (51);
- основная антенна СС имеет систему автосопровождения КА по принимаемому сигналу (57);
- с помощью аппаратуры синхронной связи (37-39) дополнительные антенны (45, 46) наводятся на КА синхронно с основной антенной СС (44).
Станция слежения по радиоканалу осуществляет обмен информацией, необходимой для управления КА (выдача команд управления, прием телеметрической и других видов информации).
Одновременно СС производит измерение дальности до КА (R) и радиальной составляющей скорости КА относительно СС ().
Дополнительные антенны (45, 46) совместно с основной (44) принимают ответный сигнал с КА (33) и передают его на блок радиоинтерферометрических измерений СС (51), который осуществляет измерение угловых параметров движения КА, характеризующих угловое положение КА:
- направляющие косинусы углов направления на КА с обоих баз (55, 56) ФП;
- разности доплеровских смещений частоты сигналов, принимаемых антеннами каждой базы, которые характеризуют скорости изменения величины направляющих косинусов на каждой базе.
Полученные данные пересчитываются в угловые координаты КА по азимуту и углу места и скорости изменения угловых координат: 
Точность определения угловых параметров движения КА зависит от длины интерферометрических баз и диапазона частот, в котором производятся эти измерения.
При длине баз 100 м погрешность угловых измерений составит при работе в радиодиапазоне 3,5 см в зависимости от угла места от 1 до 4 угловых секунд по каждой базе.
Для раскрытия неоднозначности при проведении угловых измерений используется сигнал для раскрытия неоднозначности угломерных измерений блока интерферометрических измерений (61) с частотой, равной 
Все шесть измеренных СС параметров движения КА (R,,
Эти измерения вместе с измерениями R и , проводимыми СС, позволяют в БЦ определить траекторию движения КА с высокой точностью.
Стоимость создания и эксплуатации заявляемой станции слежения будет значительно ниже, чем стоимость используемых сегодня двух станций: станции управления КА и фазового интерферометра.
Заявляемый новый способ одновременного измерения шести параметров движения КА одной СС и система для его реализации наиболее эффективно может использоваться:
- для траекторных измерений на приземном участке траектории полета межпланетных КА;
- при проведении траекторных измерений КА, прогноз траектории которых известен с большими ошибками, за счет нештатной работы двигателей при проведении динамических операций;
- при выводе КА на геостационарную орбиту ИСЗ и поддержанию его с необходимой точностью в точке стояния;
- в случаях, когда целесообразно строить НКУ КА по однопунктовой схеме.
Список литературы
1. Молотов Е.П. «Наземные радиотехнические системы управления космическими аппаратами», М.: ФИЗМАТЛИТ, 2004, 256 с.
2. Урличич Ю.М., Ежов С.А., Жодзишский А.И. и др. «Современные технологии навигации геостационарных спутников», М.: ФИЗМАТЛИТ, 2006, 271 с.

Группа изобретений относится к области траекторных измерений с использованием станции слежения (СС) за полетом космического аппарата (КА). При обмене информацией с КА по радиоканалу СС производит измерение дальности до КА и скорости ее изменения. Основная и дополнительные антенны СС принимают ответный сигнал с КА и передают его в блок интерферометрических измерений (БИИ), имеющий фазовый пеленгатор. В БИИ определяются углы азимута и места КА и скорости их изменения. Для раскрытия неоднозначности угловых измерений они дополнительно производятся на частоте, излучаемой с борта КА и равной 1/4 основной. Это позволяет не применять на СС антенн, создающих укороченные базы. Все шесть измеренных параметров (расстояние, углы и скорости их изменения) передаются в баллистический центр, где по ним определяется траектория и прогноз движения КА. Технический результат группы изобретений заключается в упрощении сети слежения за полетом КА при проведении траекторных измерений. 2 н.п. ф-лы, 2 ил.
1. Способ одновременного определения шести параметров движения космического аппарата (КА) при проведении траекторных измерений одной станцией слежения (СС), заключающийся в том, что формируют запросный сигнал СС, измеряющей шесть параметров движения КА, передают через основную антенну СС сигнал на антенну КА, формируют ответный сигнал на КА, одновременно передают его на основную, первую и вторую дополнительные антенны СС, измеряющей шесть параметров движения КА, измеряют дальность R и радиальную составляющую скорости  КА и с помощью сигналов, принятых основной, первой и второй дополнительными антеннами, в блоке интерферометрических измерений производят угломерные измерения (
КА и с помощью сигналов, принятых основной, первой и второй дополнительными антеннами, в блоке интерферометрических измерений производят угломерные измерения ( ), где
), где  - азимутальный угол положения КА относительно СС,
- азимутальный угол положения КА относительно СС,  - угол места КА,
- угол места КА,  - скорость изменения угла
- скорость изменения угла  ,
,  - скорость изменения угла
- скорость изменения угла  , дополнительно формируют сигнал для раскрытия неоднозначности угломерных измерений блока интерферометрических измерений с частотой
, дополнительно формируют сигнал для раскрытия неоднозначности угломерных измерений блока интерферометрических измерений с частотой  от частоты ответного сигнала, передают этот сигнал на антенну КА и после преобразования сигнала излучают с борта КА, принимают основной, первой и второй дополнительными антеннами СС сигнал с частотой от частоты ответного сигнала, на которой производят фазовые угломерные измерения, используемые для раскрытия неоднозначности угломерных измерений (
от частоты ответного сигнала, передают этот сигнал на антенну КА и после преобразования сигнала излучают с борта КА, принимают основной, первой и второй дополнительными антеннами СС сигнал с частотой от частоты ответного сигнала, на которой производят фазовые угломерные измерения, используемые для раскрытия неоднозначности угломерных измерений ( ) на основной частоте.
) на основной частоте.
2. Система одновременного определения шести параметров движения космического аппарата (КА) при проведении траекторных измерений одной станцией слежения (СС), включающая в себя КА, антенну КА, СС, измеряющую шесть параметров движения КА, включающую в себя основную, первую и вторую дополнительные антенны, основной, первый и второй коммутаторы, входы/выходы которых соединены с входами/выходами основной, первой и второй антенн соответственно, передатчик СС, выход которого соединен с основной антенной через второй вход основного коммутатора, первый, второй и третий блоки синхронного наведения антенны, систему автосопровождения основной антенны СС, причем вход/выход основной антенны соединен с входом системы автосопровождения основной антенны СС, система автосопровождения основной антенны СС соединена через первый вход основного коммутатора и первый выход основного коммутатора с входом второго блока синхронного наведения антенны, выход первого блока синхронного наведения антенны соединен с входом/выходом первой антенны через первый коммутатор, выход третьего блока синхронного наведения антенны соединен с входом/выходом второй антенны через второй коммутатор, первое, второе и третье приемные устройства, причем второй вход первого приемного устройства соединен с входом/выходом первой антенны через второй выход первого коммутатора, второй вход второго приемного устройства соединен с входом/выходом основной антенны через второй выход основного коммутатора, второй вход третьего приемного устройства соединен с входом/выходом второй антенны через второй выход второго коммутатора, систему траекторных измерений, первый выход которой соединен со входом передатчика СС, второй выход соединен с первыми входами первого, второго и третьего приемных устройств соответственно, блок интерферометрических измерений, первый и третий входы которого соединены с выходами первого и третьего приемных устройств соответственно, а второй вход с первым выходом второго приемного устройства, первый, второй и третий блоки раскрытия неоднозначности угломерных измерений, вход первого блока раскрытия неоднозначности угломерных измерений соединен с входом/выходом основной антенны через третий выход основного коммутатора, входы второго и третьего блоков раскрытия неоднозначности угломерных соединены с входами/выходами первой и второй антенн через первые выходы первого и второго коммутаторов, соответственно, а выходы первого, второго и третьего блоков раскрытия неоднозначности угломерных измерений соединены с первым, вторым и третьим входами блока интерферометрических измерений, выход блока интерферометрических измерений соединен с первым входом системы траекторных измерений, второй вход системы траекторных измерений соединен с вторым выходом второго приемного устройства, третий и четвертый выходы системы траекторных измерений являются выходами системы одновременного определения шести параметров движения КА при проведении траекторных измерений одной СС.
| Н.М.ИВАНОВ, А.А.ДМИТРИЕВСКИЙ, Л.Н.ЛЫСЕНКО | |||
| Баллистика и навигация космических аппаратов | |||
| М | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И ИЗМЕРИТЕЛЬНЫМИ СТАНЦИЯМИ | 2006 |
|
RU2323860C1 |
| JP 2013129307 A, 04.07.2013; | |||
| Газовая горелка | 1977 |
|
SU779739A1 |
| EP 1026519 B1, 21.04.2010 | |||
| JP 2001091636 A, 06.04.2001; | |||
| WO 2013165545 A1, 07.11.2013 | |||

