Настоящее изобретение относится к области космической навигации и геодезии, а более точно к способам измерения расстояний между космическим аппаратом и измерительными станциями.
Настоящее изобретение может быть использовано для навигационной привязки космических аппаратов по отношению к измерительным станциям слежения, которые могут быть стационарными, мобильными, наземными, космическими и т.д.
Кроме того, настоящее изобретение с наибольшим успехом может быть использовано для определения местонахождения вышеуказанных измерительных станций, в том числе, как указывалось, наземных измерительных станций.
Также, настоящее изобретение может быть использовано для взаимной навигационной привязки космических аппаратов, используемых в системах глобального позиционирования объектов (GPS, Gallileo, ГЛОНАСС и др.), с целью уточнения орбит этих космических аппаратов, их взаимного положения и повышения, тем самым, точности позиционирования определяемых объектов.
В настоящее время большое внимание уделяется решению задач геодезии и геофизики, как, например, прогнозированию землетрясений, определению «подвижек» литосферных плит Земли, определению параметров ее вращения и так далее. В связи с этим все большее применение находит космическая техника, в частности, космические аппараты, используемые для определения местонахождения измерительных станций в текущий момент времени с помощью определения расстояний от измерительных станций до этих космических аппаратов. При этом предъявляются высокие требования к ограничению времени определения расстояний между космическим аппаратом и измерительными станциями и к повышению точности измерения этих расстояний.
Известен способ измерения расстояний между космическим аппаратом и измерительными станциями (В.Н.Баранов, Б.Г.Бойко, И.И.Краснорылов и другие "Космическая геодезия" опубликована 1986 г., Москва, издательство "Недра", стр.86-92), заключающийся в том, что излучают лазерный сигнал с основной измерительной станции в направлении на космический аппарат, отражают его с помощью уголкового отражателя, установленного на космическом аппарате, в направлении на измерительную станцию, принимают его на измерительной станции, измеряют интервал времени между моментами излучения и приема сигнала и по нему определяют расстояние между космическим аппаратом и измерительными станциями.
Известен способ измерения расстояний между космическим аппаратом и измерительными станциями (В.Н.Баранов, Б.Г.Бойко, И.И.Краснорылов и другие "Космическая геодезия" опубликована 1986 г., Москва, издательство "Недра", стр.93-94) путем излучения первичного радиосигнала с основной измерительной станции в направлении на космический аппарат, приема первичного радиосигнала на космическом аппарате, ретрансляции первичного радиосигнала с космического аппарата в направлении на основную измерительную станцию, приема первичного радиосигнала на основной измерительной станции, осуществления радиосвязи конечным радиосигналом космического аппарата с по меньшей мере одной дополнительной измерительной станции, измерения моментов излучения и приема первичного радиосигналов на основной измерительной станции, измерения интервала времени, по которому судят о расстоянии между космическим аппаратом и основной измерительной станцией, и измерения интервала времени, по которому судят о расстоянии между космическим аппаратом и дополнительной измерительной станцией. По данному способу радиосвязь между космическим аппаратом и дополнительной измерительной станцией осуществляют излучением конечного радиосигнала с дополнительной измерительной станции в направлении на космический аппарат, приема конечного радиосигнала на космическом аппарате, ретрансляцией его в направлении на дополнительную измерительную станцию, приемом конечного радиосигнала на дополнительной измерительной станции, а определение расстояний между космическим аппаратом и соответственно основной и дополнительной измерительными станциями по измеренному интервалу времени между моментами излучения и приема радиосигналов осуществляют измерением интервала времени между моментами излучения и приема конечного радиосигнала на дополнительной измерительной станции.
Однако по данному способу осуществление непосредственной радиосвязи между космическим аппаратом и дополнительной измерительной станцией приводит к тому, что измерение интервалов времени между моментами излучения и приема радиосигналов осуществляют на каждой из основной и дополнительных измерительных станций раздельно и последовательно, что приводит к увеличению времени определения расстояний между космическим аппаратом и измерительными станциями.
Кроме того, по данному способу измерения интервалов времени между моментами излучения и приема радиосигналов на каждой из основной и дополнительной измерительных станций раздельно могут соответствовать местоположению космического аппарата в различных точках орбиты, что уменьшает точность определения расстояний между космическим аппаратом и измерительными станциями.
Краткое описание изобретения
Целью настоящего изобретения является разработка способа определения расстояний между космическим аппаратом и измерительными станциями, позволяющего уменьшить время определения расстояний между космическим аппаратом и измерительными станциями.
Кроме того, целью настоящего изобретения является повышение точности определения расстояния между космическим аппаратом и измерительными станциями.
Поставленные цели достигаются тем, что в способе определения расстояний между космическим аппаратом и измерительными станциями излучают первичный радиосигнал с основной измерительной станции в направлении на космический аппарат, принимают первичный радиосигнал на космическом аппарате, ретранслируют первичный радиосигнал с космического аппарата в направлении на основную измерительную станцию, принимают первичный радиосигнал на основной измерительной станции, ретранслируют первичный радиосигнал с космического аппарата на дополнительную измерительную станцию, принимают первичный радиосигнал на дополнительной измерительной станции, преобразуют его в конечный радиосигнал ретрансляцией в направлении на космический аппарат, принимают конечный радиосигнал на космическом аппарате, ретранслируют конечный радиосигнал с космического аппарата в направлении на основную измерительную станцию, принимают его на основной измерительной станции, измеряют моменты излучения и приема первичного радиосигнала на основной измерительной станции, осуществляют суждение о расстоянии между космическим аппаратом и основной измерительной станцией по следующему соотношению:
l1=(c/2)(t1-t0),
где l1 - расстояние между космическим аппаратом и основной измерительной станцией;
с - скорость распространения радиоволн;
t1 - момент приема первичного радиосигнала на основной измерительной станции;
t0 - момент излучения первичного радиосигнала с основной измерительной станции,
измеряют интервал времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, измеряют доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, и осуществляют суждение о расстоянии между космическим аппаратом и дополнительной измерительной станцией по следующему соотношению:
l2=(c/2)(t2-t1)/(1+N),
где l2 - расстояние между космическим аппаратом и дополнительной измерительной станцией;
t2 - момент приема конечного радиосигнала на основной измерительной станции;
N - доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции.
Задачи, которые должны быть решены посредством изобретения
В основу изобретения была положена задача разработки способа определения расстояний между космическим аппаратом и измерительными станциями, имеющего такие дополнительные операции, радиосвязь между космическим аппаратом и дополнительной измерительной станцией осуществлялась бы так, а измерение интервалов времени, по которым судят о расстоянии между космическим аппаратом и основной и дополнительной измерительными станциями, осуществлялось между такими моментами, что измерение интервалов времени между моментами излучения и приема радиосигналов с основной и дополнительных измерительных станций осуществлялось бы одновременно и мгновенно и соответствовало бы местоположению космического аппарата в одной и той же точке орбиты.
Метод решения задач
Это достигается тем, что в способе определения расстояний между космическим аппаратом и измерительными станциями путем излучения первичного радиосигнала с основной измерительной станции в направлении на космический аппарат, ретрансляции первичного радиосигнала с космического аппарата в направлении на основную измерительную станцию, приема первичного радиосигнала на основной измерительной станции, осуществления радиосвязи конечным радиосигналом космического аппарата с по меньшей мере одной дополнительной измерительной станции, измерения моментов излучения и приема первичного радиосигнала на основной измерительной станции, измерения интервала времени, по которому судят о расстоянии между космическим аппаратом и основной измерительной станцией и измерения интервала времени, по которому судят о расстоянии между космическим аппаратом и дополнительной измерительной станцией, согласно изобретению до измерения моментов излучения и приема первичного радиосигнала на основной измерительной станции дополнительно ретранслируют конечный радиосигнал с космического аппарата в направлении на основную измерительную станцию и принимают его на основной измерительной станции, а радиосвязь конечным радиосигналом космического аппарата с по меньшей мере одной дополнительной измерительной станции осуществляют ретрансляцией первичного радиосигнала с космического аппарата на дополнительную измерительную станцию, приемом первичного радиосигнала на дополнительной измерительной станции, преобразованием его в конечный радиосигнал ретрансляцией в направлении на космический аппарат, приемом конечного радиосигнала на космическом аппарате, а измерение интервала времени, по которому судят о расстоянии между космическим аппаратом и основной измерительной станцией, осуществляют измерением интервала времени между моментом излучения и моментом приема первичного радиосигнала на основной измерительной станции и осуществляют суждение о расстоянии между космическим аппаратом и основной измерительной станцией по следующему соотношению:
l1=(c/2)(t1-t0),
где l1 - расстояние между космическим аппаратом и основной измерительной станцией;
с - скорость распространения радиоволн;
t1 - момент приема первичного радиосигнала на основной измерительной станции;
t2 - момент излучения первичного радиосигнала с основной измерительной станции, а измерение интервала времени, по которому судят о расстоянии между космическим аппаратом и дополнительной измерительной станцией, осуществляют измерением интервала времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, при этом дополнительно измеряют доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, и осуществляют суждение о расстоянии между космическим аппаратом и дополнительной измерительной станцией по следующему соотношению:
l2=(c/2)(t2-t1)/(1+N),
где l2 - расстояние между космическим аппаратом и дополнительной измерительной станцией;
t2 - момент приема конечного радиосигнала на основной измерительной станции;
N - доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции.
Целесообразно, чтобы в способе определения расстояния между космическим аппаратом и измерительными станциями в случае множества дополнительных измерительных станций измерение интервала времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, по которому судят о расстоянии между космическим аппаратом и каждой из множества дополнительных измерительных станций, осуществляли бы одновременно.
Желательно, чтобы в способе определения расстояний между космическим аппаратом и измерительными станциями в случае определения расстояний между космическим аппаратом и измерительными станциями для по меньшей мере трех точек местонахождения космического аппарата на орбите одновременно с ретрансляцией первичного радиосигнала на дополнительные измерительные станции дополнительно ретранслировали бы его на по меньшей мере одну вспомогательную измерительную станцию, принимали первичный радиосигнал на вспомогательной измерительной станции, преобразовали его в конечной радиосигнал ретрансляцией в направлении на космический аппарат, принимали конечный радиосигнал на космическом аппарате и ретранслировали его в направлении на основную измерительную станцию, принимали конечный радиосигнал на основной измерительной станции и измеряли интервал времени и доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, и по ним судили о расстоянии между космическим аппаратом в каждом из его местонахождении на соответствующих точках орбиты и вспомогательной измерительной станцией.
Разумно, чтобы в способе определения расстояний между космическим аппаратом и измерительными станциями измерение интервала времени, по которому судят о расстоянии между космическим аппаратом в каждом из его местонахождений на соответствующих точках орбиты и вспомогательной измерительной станцией, осуществляли бы измерением интервала времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции и осуществляли бы суждение о расстоянии между космическим аппаратом и вспомогательной измерительной станцией по следующему соотношению:
l3=(c/2)(t3-t1)/(1+N),
где l3 - расстояние между космическим аппаратом и вспомогательной измерительной станцией;
t3 - момент приема конечного радиосигнала на основной измерительной станции.
Выгодно, чтобы в способе определения расстояний между космическим аппаратом и измерительными станциями доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, определяли бы из следующего соотношения:
N=(mf0-f2)/2mf0,
где m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на космическом аппарате;
f0 - частота несущей первичного радиосигнала, излученного с основной измерительной станции;
f2 - частота несущей конечного радиосигнала, принятого на основной измерительной станции.
Настоящее изобретение позволяет измерить интервалы времени между моментами излучения и приема радиосигналов с основной и дополнительных измерительных станций одновременно и мгновенно, что уменьшает время определения расстояний между космическим аппаратом и измерительными станциями.
Кроме того, настоящее изобретение обеспечивает соответствие измерения интервалов времени между моментами излучения и приема радиосигналов с основной и дополнительных измерительных станций местоположению космического аппарата в одной и той же точке орбиты, что повышает точность определения расстояния между космическим аппаратом и измерительными станциями.
Подробное описание изобретения
Способ определения расстояний между космическим аппаратом и измерительными станциями заключается в том, что излучают первичный радиосигнал с основной измерительной станции в направлении на космический аппарат и принимают его на космическом аппарате, затем ретранслируют первичный радиосигнал с космического аппарата в направлении на основную измерительную станцию и принимают его на основной измерительной станции. После ретранслируют первичный радиосигнал с космического аппарата в направлении на по меньшей мере одну дополнительную измерительную станцию, принимают его на дополнительной измерительной станции и преобразуют первичный радиосигнал в конечный радиосигнал ретрансляцией в направлении на космический аппарат. После этого принимают конечный радиосигнал на космическом аппарате, ретранслируют конечный радиосигнал с космического аппарата в направлении на основную измерительную станцию и принимают его на основной измерительной станции, затем измеряют интервал времени между моментами излучения и приема соответственно первичных радиосигналов на основной измерительной станции и осуществляют суждение о расстоянии между космическим аппаратом и основной измерительной станцией по следующему соотношению:
l1=(c/2)(t1-t0),
где l1 - расстояние между космическим аппаратом и основной измерительной станцией;
с - скорость распространения радиоволн;
t1 - момент приема первичного радиосигнала на основной измерительной станции;
t0 - момент излучения первичного радиосигнала с основной измерительной станции;
и, наконец, измеряют интервал времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, измеряют доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, и осуществляют суждение о расстоянии между космическим аппаратом и дополнительной измерительной станцией по следующему соотношению:
l2=(c/2)(t2-t0)/(1+N),
где l2 - расстояние между космическим аппаратом и дополнительной измерительной станцией;
t2 - момент приема конечного радиосигнала на основной измерительной станции;
N - доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции.
По патентуемому способу определения расстояний между космическим аппаратом и измерительными станциями в случае множества дополнительных измерительных станций для определения местонахождения космического аппарата измеряют интервал времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, по которому судят о расстоянии между космическим аппаратом и каждой из множества дополнительных измерительных станций, осуществляют одновременно.
В случае определения расстояний между космическим аппаратом и измерительными станциями для по меньшей мере трех точек местонахождения космического аппарата на орбите по патентуемому способу определения расстояний между космическим аппаратом и измерительными станциями одновременно с ретрансляцией, первичного радиосигнала на дополнительные измерительные станции дополнительно ретранслируют его на по меньшей мере одну вспомогательную измерительную станцию, принимают первичный радиосигнал на вспомогательной измерительной станции и преобразуют его в конечный радиосигнал ретрансляцией в направлении на космический аппарат. Затем принимают конечный радиосигнал на космическом аппарате, ретранслируют его в направлении на основную измерительную станцию и принимают конечный радиосигнал на основной измерительной станции. После этого измеряют интервал времени и доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, и по ним судят о расстоянии между космическим аппаратом в каждом из его местонахождений (местоположений) на соответствующих точках орбиты и вспомогательной измерительной станцией.
По патентуемому способу определения расстояний между космическим аппаратом и измерительными станциями измерение интервала времени, по которому судят о расстоянии между космическим аппаратом в каждом из его местонахождений на соответствующих точках орбиты и вспомогательной измерительной станцией осуществляют измерением интервала времени между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции и осуществляют суждение о расстоянии между космическим аппаратом и вспомогательной измерительной станцией по следующему соотношению:
l3=(c/2)(t3-t1)/(1+N1),
где l3 - расстояние между космическим аппаратом и вспомогательной измерительной станцией;
t3 - момент приема конечного радиосигнала на основной измерительной станции.
По патентуемому способу определения расстояний между космическим аппаратом и измерительными станциями доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, определяют из следующего соотношения:
N1=(mf0-f3)/(2mf0),
где m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на космическом аппарате;
f0 - частота несущей первичного радиосигнала, излученного с основной измерительной станции;
f3 - частота несущей конечного радиосигнала, принятого на основной измерительной станции.
Краткое описание чертежей
Другие цели и преимущества настоящего изобретения будут показаны ниже при рассмотрении описания примеров его конкретного выполнения со ссылками на сопровождающие чертежи, на которых:
фиг.1 изображает структурную схему известной геодезической системы, реализующей патентуемый способ определения расстояний между космическим аппаратом и измерительными станциями;
фиг.2 изображает структурную схему известной геодезической системы, реализующей патентуемый способ определения расстояний между космическим аппаратом и измерительными станциями, по фиг.1 для определения местонахождения космического аппарата согласно изобретению;
фиг.3 изображает структурную схему известной геодезической системы, реализующей патентуемый способ определения расстояний между космическим аппаратом и измерительными станциями, по фиг.3 для определения местонахождения вспомогательной измерительной станции, находящейся в районе повышенной сейсмичности согласно изобретению;
фиг.4 изображает структурную схему известной геодезической системы, реализующей патентуемый способ определения расстояний между космическим аппаратом и измерительными станциями, по фиг.3 для трех точек местонахождения космического аппарата на орбите согласно изобретению.
Способ реализован на известной геодезической системе (В.Н.Баранов, Е.Г.Бойко, И.И.Краснорылов и другие "Космическая геодезия", §18, "Радиодальномерные наблюдения ИСЗ", Москва, Недра, 1986 г., стр.93-94).
Известная геодезическая система содержит основную 1 (фиг.1) и дополнительную 2 измерительные станции, каждая из которых имеет соответственно антенну 3, 4. По орбите 5, условно показанной пунктиром, указано перемещение космического аппарата 6, имеющего антенну 7 через ее точки 8 (B1) и 9 (В2). По траектории 15, условно показанной пунктиром, указано перемещение дополнительной измерительной станции 2 через ее точки 16 (D1) и 17 (D2). На фигуре 1 также даны условно обозначенные радиосигналы. Первичный радиосигнал 10, излученный с основной измерительной станции 1, находящейся в точке А, в направлении на космический аппарат 6, первичный радиосигнал 11, ретранслированный с космического аппарата 6 в направлении на основную измерительную станцию 1 и первичный радиосигнал 12, ретранслированный с космического аппарата 6 в направлении на дополнительную измерительную станцию 2.
Конечный радиосигнал 13, ретранслированный с дополнительной измерительной станции 2 в направлении на космический аппарат 6, и конечный радиосигнал 14, ретранслированный с космического аппарата 6 в направлении на основную измерительную станцию 1.
Первичные радиосигналы 10, 11, 12 определены при нахождении космического аппарата 6 в точке 8 (B1) орбиты 5.
Конечные радиосигналы 13 и 14 определены соответственно при нахождении космического аппарата 6 в точке 9 (В2) орбиты 5 и дополнительной измерительной станции 2 в точке 17 (D2) траектории 15.
По другому варианту выполнения известная геодезическая система, реализующая способ определения расстояний между космическим аппаратом и измерительными станциями, аналогична геодезической системе по фиг.1. Отличие заключается в том, что она содержит еще одну дополнительную измерительную станцию 18 (фиг.2).
Орбита 5 имеет еще одну точку 19 (В3), расположенную между ее точками 8 (B1) и 9 (В2).
На фиг.2 дополнительно даны условно обозначенные радиосигналы. Первичный радиосигнал 20, ретранслированный с космического аппарата 6, находящегося в точке 8 (B1) орбиты 5, в направлении на вторую дополнительную измерительную станцию 18 и принятый ею при нахождении в точке 21 (Е2). Конечный радиосигнал 23, ретранслированный со второй дополнительной измерительной станции 18 в направлении на космический аппарат 6, и конечный радиосигнал 24, ретранслированный с космического аппарата 6 в направлении на основную измерительную станцию 1. Конечные радиосигналы 23, 24 определены при нахождении второй дополнительной измерительной станции 18 в положении 21 (Е2) и космического аппарата 6 в точке 19 (В3) орбиты 5.
Еще по одному варианту выполнения известная геодезическая система, реализующая способ определения расстояния между космическим аппаратом и измерительными станциями, аналогична геодезической системе по фиг.2. Отличие заключается в том, что она содержит находящуюся в точке F вспомогательную измерительную станцию 26 (фиг.3). Орбита 5 имеет еще одну точку 27 (B4), расположенную между ее точками 19 (В3) и 9 (В2).
На фиг.3 дополнительно даны условно обозначенные радиосигналы. Первичный радиосигнал 28, ретранслированный с космического аппарата 6, находящегося в точке 8 (B1) орбиты 5, в направлении на вспомогательную измерительную станцию 26. Конечный радиосигнал 29, ретранслированный с вспомогательной измерительной станции 26 в направлении на космический аппарат 6, и конечный радиосигнал 30, ретранслированный с космического аппарата 6 в направлении на основную измерительную станцию 1. Конечные радиосигналы 29 и 30 определены при нахождении космического аппарата 6 в точке 27 (В4) орбиты 5. Для упрощения дополнительная станция 18 и вспомогательная измерительная станция 26 условно показаны неподвижными.
По последнему варианту выполнения (фиг.4) известная геодезическая система, реализующая способ определения расстояний между космическим аппаратом и измерительными станциями, аналогична геодезической системе по фиг.3. Отличие заключается в том, что орбита 5 имеет еще две точки 31 (B5) и 32 (В6).
Геодезическая система, реализующая способ определения расстояний между космическим аппаратом 6 (фиг.1) и основной 1 и дополнительной 2 измерительными станциями, работает следующим образом.
На основной измерительной станции 1(А) формируют и излучают с помощью антенны 3 в направлении движущегося по орбите 5 космического аппарата 6 первичный радиосигнал 10. Этот радиосигнал 10 принимают антенной 7 космического аппарата 6, находящемся в точке 8 (B1) орбиты 5, и когерентно ретранслируют в направлении на основную 1 и дополнительную 2 измерительные станции соответственно первичными сигналами 11 и 12. При этом дополнительная измерительная станция 2 находится в точке 16 (D1) траектории 15. Затем принимают первичный радиосигнал 11 на основной измерительной станции 1. Принимают первичный радиосигнал 12 антенной 4 дополнительной измерительной станции 2, переместившейся из точки 16 (D1) в точку 17 (D2) траектории 15, когерентно преобразуют его в конечный радиосигнал 13 ретрансляцией в направлении на космический аппарат 6 и принимают конечный радиосигнал 13 на космическом аппарате 6, который за это время переместится из точки 8 (B1) в точку 9 (В2) орбиты 5.
Измеряют момент t0 излучения первичного радиосигнала 10 с основной измерительной станции 1, момент t1 приема первичного радиосигнала 11 на основной измерительной станции 1 и измеряют интервал (t1-t0) времени, определяемый этими моментами t0 и t1. Затем по измеренному интервалу (t1-t0) времени определяют расстояние l1 между космическим аппаратом 6, находящемся в точке 8 (B1) орбиты 5, и основной измерительной станцией 1 из следующего соотношения:
l1=(c/2)(t1-t0),
где с - скорость распространения радиоволн.
Для определения расстояния l2 между космическим аппаратом 6 и дополнительной измерительной станцией 2 ретранслируют конечный радиосигнал 14 с космического аппарата 6, находящегося в точке 9 (В2) орбиты 5, в направлении на основную измерительную станцию 1. Принимают конечный радиосигнал 14 на основной измерительной станции 1 и измеряют момент t2 его приема. После этого измеряют интервал (t2-t1) времени, определяемый моментом t1, измеренным ранее, и моментом t2. Кроме того, измеряют доплеровский сдвиг N частоты f2 несущей конечного радиосигнала 14 относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1.
По измеренным интервалу (t2-t1) времени и доплеровскому сдвигу N частоты f2 конечного радиосигнала 14 определяют расстояние l2 между космическим аппаратом 6, находящемся в точке 8 (B1) орбиты 5, и дополнительной измерительной станцией 2 из следующего соотношения:
l2=(c/2)(t2-t1)/(1+N),
где N=(mf0-f2)/2mf0,
где m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на космическом аппарате 6.
Найденные значения расстояний l1 и l2 соответствуют нахождению космического аппарата 6 в точке 8 (B1) орбиты 5, то есть моменту Т приема первичного радиосигнала 10 на космическом аппарате 6, определяемому из известного соотношения:
T=(t1+t0)/2.
Рассмотрим подробнее соотношения, иллюстрирующие реализацию предлагаемого способа.
Расстояние AB1 от основной измерительной станции 1 до космического аппарата 6 и расстояние B1D1 от дополнительной измерительной станции 2 до космического аппарата 6 (фиг.1) соответствуют моменту Т (где Т=(t0+t1)/2) приема и ретрансляции радиосигнала 10 на космическом аппарате 6 в точке 8 (B1), при этом дополнительная измерительная станция 2 находится в точке 16 (D1).


Выразим расстояние В2А

где Vab - скорость изменения расстояния между космическим аппаратом 6 и основной измерительной станцией 2;
Выразим расстояние B2D2
B2D2=B1D2+Vbd(B1D2/c)+V4(B2D2/c)
или B2D2 [1-V4/c]=[B1D2+Vbd(B1D2/c)], т.е.

где Vbd - скорость изменения расстояния между космическим аппаратом 6 и дополнительной измерительной станцией 2;
V4 - скорость перемещения космического аппарата 6 по направлению DB;
Выразим
B1D2=B1D1+V3(B1D2/c)
или B1D2 [1-V3/с]=B1D1, т.е.

V3 - скорость перемещения дополнительной измерительной станции 2 по направлению BD;
из (1), (2) и (3)

Откуда можно получить с учетом (1)

Далее, с учетом (4) и (5), получим в результате преобразований

Раскрывая скобки и преобразуя (8) получим
Поскольку
[(Vbd/c)(Vbd/c+(V3/c)(V4/c))]<7,3·10-10
получим из(9)

Окончательно получим из (7) и (10)
B1D2+D2B2=2B1D1[1+Vbd/c]=c(t2-t1)/(1+Vab/c)
и тогда

или с учетом того, что 

Выразим скорости Vab и Vbd через доплеровские сдвиги частот несущих сигналов f1 и f2 для соответственно конечных радиосигналов 11 и 14, относительно частоты несущей f0 первичного радиосигнала 10.
f1=f0(1-2Vab/c)
f2=f1(1-2Vbd/c)
и тогда с учетом (12)
Vab/c+Vbd/c≅(f0-f2)/2f0
После преобразований получаем из (13)

С учетом того, что первичный сигнал 10, излученный с измерительной станции 1, при приеме и ретрансляции на космическом аппарате 6 когерентно ретранслируется с коэффициентом преобразования m, а конечный сигнал при приеме и ретрансляции на дополнительной измерительной станции 2 когерентно ретранслируется с коэффициентом преобразования 1/m, окончательно выразим соотношение (13) следующим образом:

где

Таким образом, по измеренным значениям параметров радиосигналов можно определить синхронные расстояния AB1 и B1D1, соответствующие нахождениям космического аппарата 6 в точке 8 (B1) и дополнительной измерительной станции 2 в точке 16 (D1) в момент времени Т=(t1+t0)/2.
Далее, при прохождении космического аппарата 6 в зоне радиовидимости измерительной станции 1 и дополнительной измерительной станции 2, после определения нескольких или ряда синхронных расстояний AB1 и B1D1 для разных моментов времени Т, определяют траекторию перемещения космического аппарата 6 относительно измерительных станций 1 и 2. Затем, зная траекторию движения дополнительной измерительной станции 2, определяют компоненты скоростей V3 и V4. Окончательно, зная компоненты скоростей Vab, Vbd, V3 и V4, по вышеуказанным соотношениям можно уточнить значения расстояний AB1 и B1D1.
В случае, когда необходимо определить местонахождение космического аппарата 6, известная геодезическая система по фиг.2, реализующая способ определения расстояний между космическим аппаратом и измерительными станциями, работает аналогично описанной геодезической системе по фиг.1. Отличие заключается в том, что одновременно с ретрансляцией первичного радиосигнала 10 с космического аппарата 6, находящегося в точке 8 (B1) орбиты 5, в направлении на дополнительную измерительную станцию 2, ретранслируют первичный радиосигнал 20 в направлении на дополнительную измерительную станцию 18. Этот радиосигнал 20 принимают на станции 18 и преобразуют в конечный радиосигнал 23 ретрансляцией в направлении на космический аппарат 6. На космическом аппарате 6, находящемся в точке 19 (В3) орбиты 5, принимают конечный радиосигнал 23 и ретранслируют в направлении на основную измерительную станцию 1 конечным радиосигналом 24. Далее на основной измерительной станции 1 принимают конечный радиосигнал 24, измеряют момент t3 приема этого радиосигнала и затем измеряют интервал (t3-t1) времени, определяемый моментом t1, измеренным ранее, и моментом t3.
Кроме того, измеряют доплеровский сдвиг N1 частоты f3 несущей конечного радиосигнала 24 относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1.
По измеренному интервалу (t3-t1) времени и доплеровскому сдвигу N1 частоты f3 конечного радиосигнала 24 определяют расстояние l3 между космическим аппаратом 6, находящемся в точке 8 (B1) орбиты 5, и дополнительной измерительной станцией 18 - точка 25 (E1), из следующего соотношения:

где

По найденному расстоянию l3 и ранее определенным расстоянием l1 и l2 между космическим аппаратом 6, находящемся в точке 8 (B1) орбиты 5, и соответственно основной 1 и дополнительной 2 измерительными станциями, а также известным местонахождениям станции 1 - точка А, станции 2 - точка 16 (D1) и станции 18 - точка 25 (E1), известным образом (В.Н.Баранов, Е.Г.Бойко, И.И.Краснорылов и другие "Космическая геодезия ", Москва, Недра, 1986, с.217) определяют местонахождение космического аппарата 6, находящегося в точке 8 (B1) орбиты 5 в момент Т приема первичного радиосигнала 10 на космическом аппарате 6, определяемому из соотношения:
T=(t1+t0)/2.
В случае, когда стоит задача прогнозирования землетрясений, необходимо быстро определять местоположение измерительной станции, в данном случае наземной, находящейся в районе повышенной сейсмичности, то есть определять "подвижки" земной коры в месте расположения этой станции. При этом известная геодезическая система по фиг.3, 4, реализующая способ определения расстояний между космическим аппаратом и измерительными станциями, работает аналогично описанной геодезической системе по фиг.2. Отличие заключается в том, что первичный радиосигнал 10, принятый на космическом аппарате 6, находящемся в точке 8 (B1) орбиты 5, одновременно преобразуют ретрансляцией в первичный радиосигналы 12, 13 в направлении на дополнительные измерительные станции 2, 18 и в первичный радиосигнал 28 в направлении на вспомогательную измерительную станцию 26.
Радиосигнал 28 принимают на станции 26 и преобразуют в конечный радиосигнал 29 ретрансляцией в направлении на космический аппарат 6.
На космическом аппарате 6, находящемся в точке 27 орбиты 5, принимают конечный радиосигнал 29 и ретранслируют в направлении на основную измерительную станцию 1 конечным радиосигналом 30.
Далее на основной измерительной станции 1 принимают конечный радиосигнал 30, измеряют момент t4 приема этого радиосигнала и затем измеряют интервал (t4-t1) времени, определяемый моментом t1, измеренным ранее, и моментом t4.
Кроме того, измеряют доплеровский сдвиг N2 частоты f4 несущей конечного радиосигнала 30 относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1.
По измеренному интервалу (t4-t1) времени и доплеровскому сдвигу N3 частоты f4 конечного радиосигнала 30 определяют расстояние l4 между космическим аппаратом 6, находящемся в точке 8 (B1) орбиты 5, и вспомогательной измерительной станцией 26 из следующего соотношения:

где

Далее аналогично вышеописанному определяют местоположения космического аппарата 6 в точках 31 (фиг.4) и 32 орбиты 5. Для этих точек 31 и 32 определяют соответственно расстояние l5, и l6 между космическим аппаратом 6 и вспомогательной измерительной станцией 6.
Теперь, зная местоположения точек 8, 31, 32 орбиты 5 и, соответственно, расстояния l4, l5, и l6 между этими точками 8, 31, 32 и вспомогательной измерительной станцией 26 определяют широко известным образом местонахождение вспомогательной измерительной станции 26.
При реализации способа (в т.ч. при формировании, передаче, преобразовании, приеме и обработке радиосигналов, коррекции атмосферной и других составляющих измерений) могут быть использованы известные аппаратурные и программные решения, применяемые в системах глобального позиционирования GPS, ГЛОНАСС, Galileo и др. (см., например: http://www.colorado.edu/geography/gcraft/notes/gps/gps_ftoc.html, http://europa. eu. int/comm/dgs/energy_transport/galileo/documents/technical_en.htm).
При определении расстояний кроме доплеровского сдвига частоты N можно использовать и другие соотношения, содержащие информацию о доплеровском сдвиге частот излученных и принятых радиосигналов, например доплеровский счет за определенный интервал времени, отношение мгновенных значений частот, интегральный доплеровский счет и т.д., преобразовав, соответственно, уравнения (14)-(20).
Эффективность изобретения
Настоящее изобретение позволяет проводить синхронные измерения расстояний между космическим аппаратом и измерительными станциями, количество которых не ограничено, чем может быть достигнута реализация "геометрического" метода определения местоположения космического аппарата на орбите, а также построения геофизической сети измерительных станций в реальном масштабе времени. При этом обеспечивается повышенная точность и оперативность построения геофизической сети, так как для ее построения не требуется предварительного точного знания орбит космических аппаратов, поскольку определение этих орбит происходит сразу после получения данных измерений.
В качестве «опорных» измерительных станций, по измерениям на которых определяют орбиту космического аппарата, могут быть использованы станции, установленные в сейсмически неактивных районах, а «подвижки» измерительных станций, установленных в сейсмоопасных районах, определяют с учетом полученных данных об орбите космического аппарата и расстояниях между космическим аппаратом и этими измерительными станциями.
Кроме того, настоящее изобретение обеспечивает излучение, прием и обработку всех радиосигналов на одной измерительной станции, что дает возможность определять местоположение космического аппарата в каждый текущий момент времени, а также определять на этой измерительной станции расстояние между космическим аппаратом и другими измерительными станциями без необходимости сбора и передачи дополнительных данных.
Также настоящее изобретение позволяет использовать в реализующей патентуемый способ геофизической системе достаточно простые радиотехнические устройства - ретрансляторы, что повышает надежность и мобильность этой геофизической системы, а также позволяет автоматизировать режим ее работы, что даст возможность устанавливать измерительные станции в сейсмоопасных труднодоступных районах для определения «подвижек» этих станций. Известно, что перед землятресением наблюдается деформация земной коры, связанная с движением литосферных плит, и проявляющаяся в смещениях точек поверхности Земли (см., например: Певнев А.К. «Пути к практическому прогнозу землетрясений». // Изв. секции наук о Земле РАЕН. 2001, вып.6, с.83-92).
В качестве космических аппаратов возможно использовать искусственные спутники Земли (ИСЗ) с наиболее оптимальными (с точки зрения геометрии расположения измерительных станций) параметрами орбит. При этом не требуется знания точных параметров орбит этих ИСЗ, так как определение этих параметров может быть произведено непосредственно в процессе измерений. Возможна установка ретрансляторов на многочисленных ИСЗ, предназначенных для мониторинга состояния атмосферы Земли и прогноза погоды.
Кроме того, настоящее изобретение может быть использовано для взаимной навигационной привязки космических аппаратов, используемых в системе глобального позиционирования объектов ГЛОНАСС (а также GPS Gallileo, и др.), с целью уточнения орбит космических аппаратов, входящих в систему, их взаимного положения и повышения, тем самым, точности позиционирования определяемых объектов (см., например: http://www.glonass-center.ru/; http://www.igeb.gov/; http://www.gallileolonass-center.ru/)
При этом на ИСЗ навигационных систем могут быть дополнительно установлены указанные выше ретрансляторы, а также может быть рассмотрен вариант программного перепрограммирования штатных радиосистем этих ИСЗ для реализации предлагаемого способа.
Кроме того, предлагаемый способ может быть использован для взаимной синхронизации и привязки различных навигационных систем (GPS, Gallileo, ГЛОНАСС и др.) друг к другу с целью повышения точности определения координат объектов с помощью систем позиционирования.
Также возможно использовать предлагаемый способ для изучения геодинамических движений земной коры, например в местах пролегания трубопроводов, при проектировании и эксплуатации мостов и т.д. (см., например: «научный проект - геомеханика», «Современная геодинамика и безопасность объектов в подземном пространстве», А.Д.Сашурин, Институт Горного Дела УрО РАН, г.Екатеринбург, 2000 г., http://igd.uran.ru/).
Перечень позиций и буквенных обозначений, используемых в описании изобретения:
1 - основная измерительная станция;
2 - дополнительная измерительная станция;
3 - антенна станции 1;
4 - антенна станции 2;
5 - орбита космического аппарата;
6 - космический аппарат;
7 - антенна космического аппарата;
8 - точка (B1) орбиты 5 космического аппарата;
9 - точка (B2) орбиты 5 космического аппарата;
10 - первичный радиосигнал;
11 - первичный радиосигнал;
12 - первичный радиосигнал
13 - конечный радиосигнал;
14 - конечный радиосигнал;
15 - траектория движения дополнительной измерительной станции;
16 - точка (D1) траектории дополнительной измерительной станции 2;
17 - точка (D2) траектории дополнительной измерительной станции 2;
18 - вспомогательная измерительная станция;
19 - точка (В3) орбиты космического аппарата 6;
20 - первичный радиосигнал;
21 - точка (Е2) траектории вспомогательной измерительной станции 18;
22 - траектория движения вспомогательной измерительной станции 18;
23 - конечный радиосигнал;
24 - конечный радиосигнал;
25 - точка (E1) траектории вспомогательной измерительной станции 18;
26 - вспомогательная измерительная станция;
27 - точка (B4) орбиты 5 космического аппарата;
28 - первичный радиосигнал;
29 - конечный радиосигнал;
30 - конечный радиосигнал;
31 - точка (В5) орбиты 5 космического аппарата;
32 - точка (В6) орбиты 5 космического аппарата;
l1 - расстояние между космическим аппаратом 6 и основной измерительной станцией 1;
t1 - момент приема первичного радиосигнала 10 на основной измерительной станции 1;
t0 - момент излучения первичного радиосигнала 10 с основной измерительной станции 1;
t1 - момент приема конечного радиосигнала 11 на основной измерительной станции 1;
l2 - расстояние между космическим аппаратом 6 в момент его местонахождения в точке 8 (B1) орбиты 5 и дополнительной измерительной станцией 2;
t2 - момент приема конечного радиосигнала 14 на основной измерительной станции 1;
N - доплеровский сдвиг частоты f2 несущей конечного радиосигнала 14, принятого на основной измерительной станции 1, относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1;
N1 - доплеровский сдвиг частоты f3 несущей конечного радиосигнала 24, принятого на основной измерительной станции 1, относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1;
N2 - доплеровский сдвиг частоты f4 несущей конечного радиосигнала 30, принятого на основной измерительной станции 1, относительно частоты f0 несущей первичного радиосигнала 10, излученного с основной измерительной станции 1;
l3 - расстояние между космическим аппаратом 6 в момент его местонахождения в точке 8 (B1) орбиты 5 и дополнительной измерительной станцией 18 в момент ее местонахождения в точке 25 (E1);
t3 - момент приема конечного радиосигнала 24 на основной измерительной станции;
f0 - частота несущей первичного радиосигнала 10, излученного с основной измерительной станции 1;
f1 - частота несущей конечного радиосигнала 11, принятого на основной измерительной станции 1;
f2 - частота несущей конечного радиосигнала 14, принятого на основной измерительной станции 1;
f3 - частота несущей конечного радиосигнала 24, принятого на основной измерительной станции 1;
f4 - частота несущей конечного радиосигнала 30, принятого на основной измерительной станции 1;
m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на космическом аппарате 6;
1/m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на измерительных станциях 2, 18, 26;
t4 - момент приема конечного радиосигнала 30 на основной измерительной станции 1;
l4 - расстояние между космическим аппаратом 6 в момент его местонахождения в точке 8 (B1) орбиты 5 и вспомогательной измерительной станцией 26;
l5 - расстояние между космическим аппаратом 6 в момент его местонахождения в точке 31 (В5) орбиты 5 и вспомогательной измерительной станцией 26;
l6 - расстояние между космическим аппаратом 6 в момент его местонахождения в точке 32 (В6) орбиты 5 и вспомогательной измерительной станцией 26.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ РАССТОЯНИЙ МЕЖДУ КОСМИЧЕСКИМ АППАРАТОМ И СТАНЦИЯМИ | 2008 |
|
RU2401437C2 |
| СПОСОБ СЛИЧЕНИЯ ШКАЛ ВРЕМЕНИ СТАНЦИЙ | 2007 |
|
RU2347255C1 |
| Способ определения ортогональных составляющих вектора скорости космического аппарата с использованием земной станции и излучающей опорной реперной станции | 2023 |
|
RU2801257C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ определения координат космического аппарата с использованием земных станций и излучающей опорной реперной станции | 2023 |
|
RU2803662C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2021 |
|
RU2788518C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРОВ СКОРОСТИ ДВУХ КОСМИЧЕСКИХ АППАРАТОВ С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2822690C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРТОГОНАЛЬНЫХ СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ | 2020 |
|
RU2750753C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2834416C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО АППАРАТА С ИСПОЛЬЗОВАНИЕМ ЗЕМНЫХ СТАНЦИЙ И ИЗЛУЧАЮЩЕЙ ОПОРНОЙ РЕПЕРНОЙ СТАНЦИИ | 2023 |
|
RU2805667C1 |
Изобретение относится, в целом, к области космической навигации и геодезии. Предлагаемый способ включает излучение и ретрансляцию первичного и конечных радиосигналов между КА, основной и дополнительными (вспомогательными) наземными измерительными станциями. При этом дополнительно ретранслируют конечный радиосигнал с КА на основную наземную станцию и принимают его на этой станции. Радиосвязь конечным радиосигналом КА с одной или более дополнительными станциями осуществляют ретрансляцией первичного радиосигнала с КА на дополнительную станцию, приемом первичного сигнала на дополнительной станции, преобразованием его в конечный сигнал и приемом последнего на КА. О расстоянии между КА и основной измерительной станцией судят по интервалу между моментом излучения и моментом приема первичного сигнала на этой станции. О расстоянии между КА и дополнительной измерительной станцией судят по интервалу между моментом приема первичного и моментом приема конечного радиосигналов на основной станции. Дополнительно измеряют доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного сигнала, излученного с этой же станции. Расстояние между КА и дополнительной станцией определяют с учетом данного доплеровского сдвига. Технический результат изобретения направлен на уменьшение времени определения расстояний между КА и измерительными станциями, а также на повышение точности определения этих расстояний. 4 з.п. ф-лы, 4 ил.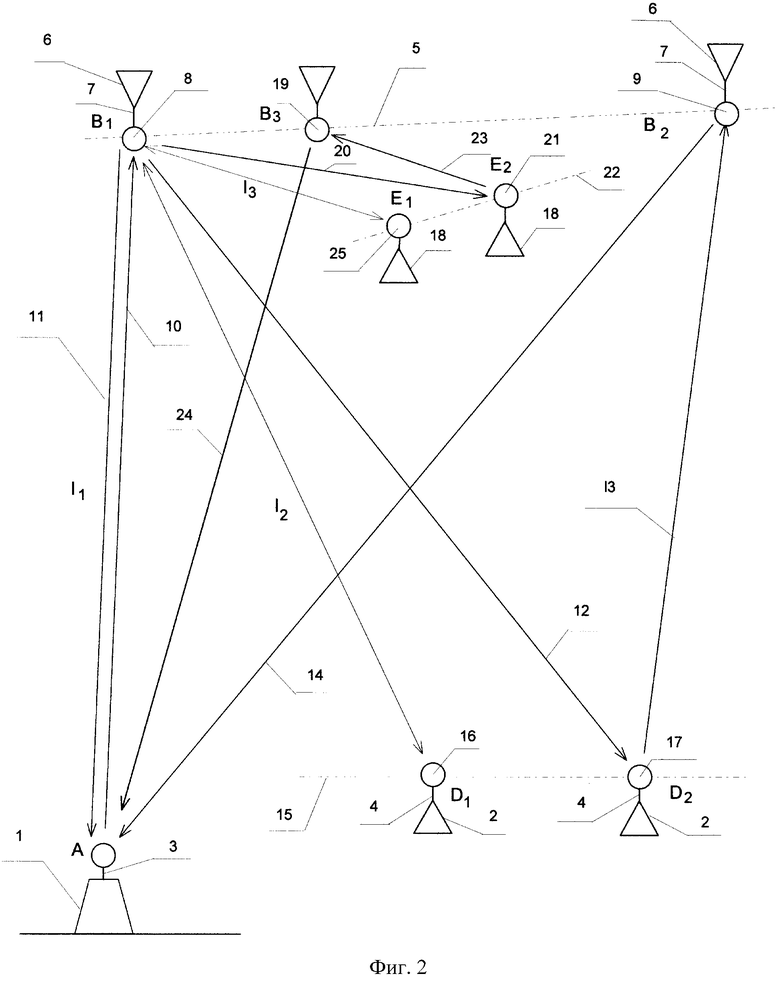
l1=(c/2)(t1-t0),
где с - скорость распространения радиоволн;
t1 - момент приема первичного радиосигнала на основной измерительной станции;
t0 - момент излучения первичного радиосигнала с основной измерительной станции,
в качестве интервала времени, по которому судят о расстоянии между космическим аппаратом и дополнительной измерительной станцией, измеряют интервал между моментом приема первичного радиосигнала и моментом приема конечного радиосигнала на основной измерительной станции, при этом дополнительно измеряют доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции, а о расстоянии (l2) между космическим аппаратом и дополнительной измерительной станцией судят по соотношению
l2=(c/2)(t2-t1)/(1+N).
где t2 - момент приема конечного радиосигнала на основной измерительной станции;
N - доплеровский сдвиг частоты несущей конечного радиосигнала, принятого на
основной измерительной станции, относительно частоты несущей первичного радиосигнала, излученного с основной измерительной станции.
l4=(c/2)(t4-t1)/(1+N),
где t4 - момент приема конечного радиосигнала на основной измерительной станции.
N=(mf0-f2)/(2mf0),
где m - коэффициент преобразования частоты несущей радиосигнала при его когерентной ретрансляции на космическом аппарате;
f0 - частота несущей первичного радиосигнала, излученного с основной измерительной станции;
f2 - частота несущей конечного радиосигнала, принятого на основной измерительной станции.
| БАРАНОВ В.Н., БОЙКО Б.Г | |||
| и др | |||
| Космическая геодезия | |||
| - М.: Недра, 1986, с.93-94 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ, СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ, ДАЛЬНОСТИ И ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ НАВИГИРУЮЩИМСЯ ОБЪЕКТОМ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1998 |
|
RU2152048C1 |
| ДАЛЬНОМЕРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И СОСТАВЛЯЮЩИХ ВЕКТОРА СКОРОСТИ ОБЪЕКТОВ ПО РАДИОСИГНАЛАМ КОСМИЧЕСКИХ АППАРАТОВ СПУТНИКОВЫХ РАДИОНАВИГАЦИОННЫХ СИСТЕМ | 1994 |
|
RU2115137C1 |
| Экономайзер | 0 |
|
SU94A1 |
| DE 3227547 A1, 02.02.1984. | |||

