Данное изобретение относится к области геодезии, навигации, маркшейдерского дела и может быть использовано для сохранения (контроля) заданного геодезического направления в стационарных условиях и на местности.
Необходимость использования известного геодезического направления (ГН) встречается достаточно часто. Определение, а затем и сохранение, геодезического направления является сложной и объемной задачей.
Для того, чтобы закрепить и сохранять на длительное время геодезическое направление (ГН), определенное в ходе кропотливых и продолжительных геодезических работ, нужно возвести фундаментальные сооружения, которые служат для размещения и надежного закрепления на местности элементов хранителя ГН, либо создавать сложные геодезические приборы. Это мероприятие очень трудоемкое и дорогостоящее.
В качестве элементов хранителя ГН могут быть использованы оптические коллиматоры (ОК), геодезические точки (ГТ), ориентирные пункты (ОРП), закладные точки (ЗТ), вехи и т.д. ОК, ГТ, ОРП, ЗТ и вехи являются элементами стационарных хранителей ГН на местности.
Так же непосредственно хранителями ГН могут выступать квантово-оптические гирометры (КОГ); указатели северного направления; гироскопические приборы (ГП) - гиротеодолиты, гирокомпасы; стационарные эталонные направления.
Элементы, закрепленные на местности, имеют общий недостаток, характеризующийся отсутствием твердой уверенности в неизменности их первоначального положения. Кроме этого, сложно определить, какой именноэлемент сместился со своего первоначального положения. Естественно, что после определенного промежутка времени в результате либо каких-то природных, либо техногенных причин, взаимное расположение элементов хранителя ГН может хаотично измениться. Восстановление ГН требует серьезных затрат времени и средств.
На современном этапе применение тех или иных способов сохранения или восстановления ГН зависит и от специфических особенностей существующих приборов. Так точность определения направления с помощью GPS-навигации не всегда отвечает предъявляемым требованиям, ибо орбита спутников может меняться под влиянием магнитных бурь в период активности Солнца и других причин. А сами данные со спутников могут быть недоступны (шахты, закрытые сооружения) или преднамеренно искажены.
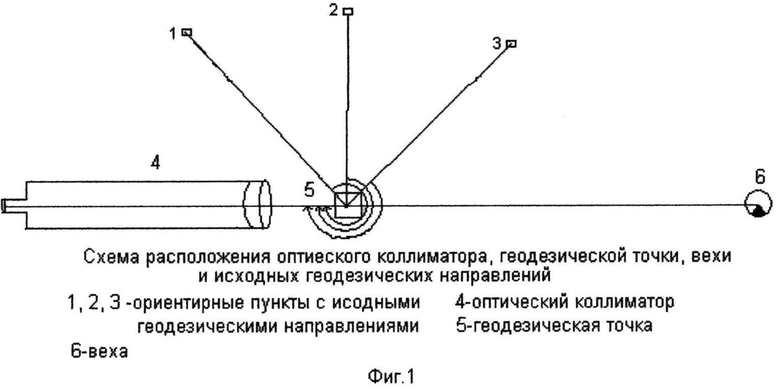
1). Известен способ создания хранителя ГН с помощью ОК (7132.ru>w/kolimator), ГТ, вехи и исходных ГН на ОРП. Размещение элементов хранителя показано на Фиг.1.
На местности в определенном порядке относительно ГТ размещаются ОК, ОРП и веха (вехи).
Прежде чем передать с ГТ азимут на ОК и зафиксировать его маркой вехи, нужно изображение марки вехи, ее вертикальной линии или вершину треугольника, ввести в биссектор ОК. Для этого марку вехи или ОК направляющими винтами перемещают влево или вправо, пока изображение марки не попадет в биссектор ОК. На самой ГТ устанавливают измерительный прибор, как правило, теодолит, с помощью которого измеряются горизонтальные углы между ОРП с исходными геодезическими направлениями, и закрепленными на местности ОК. Значение азимута можно получить так же в ходе гироскопических или астрономических измерений. Различия этих способов заключаются в применяемых приборах и способах определения азимута. После окончания работ соответствующие элементы хранителя ГН остаются закрепленными на местности.
По истечении некоторого промежутка времени может обнаружиться, что вертикальная линия марки вехи находится вне бессектора ОК. Это говорит о том, что элементы хранителя ГН изменили свое первоначальное положение, в частности либо сам ОК, либо ГТ, либо веха, либо все вместе или какая-то часть. Возникает неопределенность, что именно сместилось со своего первоначального положения. Как результат - ГН не сохранено и работу по восстановлению ГН требуется проводить заново.
2). Известно устройство для определения направления на север [12], содержащее 3 неподвижных ДУС, углы между направлениями осей чувствительности, которых составляют 120°, расположенных в горизонтальном плане. Направление на север определяется на основе максимального значения синусной кривой сигнала, получаемого на операционном модуле с датчиков.
Недостатком данного устройства является зависимость точности определения направления на север от температуры каждого ДУСа.
3). Известен указатель северного направления на волоконно-оптическом гироскопе (ВОГ) [9], где гироскоп устанавливают на приблизительно горизонтальную платформу и приводят в движение по четырем последовательным угловым положениям с интервалом 90°, сигнал гироскопа усредняется компьютером по каждой позиции азимутальных точек.
Недостатком данного указателя является то, что методика определения направления на север требует поворота платформы на 360°, необходимо введение тонкого токоподвода, тем самым увеличивается время определения меридиана, сложность изготовления и оказывает влияние на точность. ВОГ не обеспечивает необходимую стабильность смещения нуля и масштабного коэффициента в нужном диапазоне температур. Требуется наличие компьютера и программного обеспечения.
4). Известен лазерный гирокомпас 9А184 [10], статического типа, который измеряет проекции ускорения свободного падения на измерительные оси акселерометра и проекцию угловой скорости вращения Земли на ось чувствительности лазерного датчика угловой скорости, который расположен в плоскости горизонта. Блок измерений включает устройство поворота в виде шагового электродвигателя на 8 положений, из которых используются четыре рабочих положения через 90°÷5”, лазерный датчик угловой скорости, два акселерометра, датчик углового положения платформы, блок электроники. Этот гирокомпас имеет время определения азимута 8 мин, погрешность азимута с вероятностью 0,9 не более 10'.
Недостатками данного прибора являются необходимость предварительного прогрева в течении 25 минут, время определения азимута составляет 8 минут, сумма масс блока измерения и пульта автономного управления - 14 кг, методика определения направления на север требует поворота платформы на 360°, тем самым увеличивая время определения меридиана.
5). Известен способ, когда в качестве хранителя ГН используется гиротеодолит (гирокомпас) [11]. Гиротеодолит горизонтируют и центрируют над геодезической точкой. Запускают гиромотор. После достижения рабочего режима проводят серию наблюдений точек реверсии гироскопа. В ходе соответствующих вычислений определяется направление истинного меридиана.
Недостатками данного способа являются необходимость использования достаточно сложной и громоздкой аппаратуры, продолжительность проводимых операций, время которых нельзя сократить, соблюдение требований по допускам при проведении наблюдений точек реверсии, потребность проведения расчетов, невозможность использования гиротеодолита на полюсах и наличие ограничений при работах в 15-ти градусных по широте приполюсных районах. Для закрепления ГН требуется на местности установить соответствующие сооружения, так как после свертывания гиротеодолита значение истинного меридиана необходимо определять заново.
Все гироскопические приборы имеют большие веса. Так, например гирокомпас 15Ш29 весит 25 кг, вес комплекта в укладочных ящиках 172 кг. Гиротеодолит Ги-Б1 весит 19.5 кг, вес комплекта в укладочных ящиках 160 кг, Ги-Б2 весит 16.5 кг, вес комплекта в укладочных ящиках 160 кг.
Гироскопические приборы требуют периодического «эталонирования» т.е. определения поправок, влияющих на точность работы. Эталонирование проходит на пунктах, имеющих высокоточные астрономические азимуты. Кроме того, ГП дорогостоящие и недолговечные, так как имеют в своем составе быстровращающиеся детали.
Наиболее близкими по технической сущности к заявляемому объекту являются гиротеодолиты и гирокомпасы.
Основными недостатками прототипов являются: сложность и высокая стоимость изготовления. Необходимо периодическое определение поправок, влияющих на точность работы. Промежуток времени между двумя последовательными точками реверсии у гироприборов составляет около четырех с половиной минут. Полученные отсчеты должны соответствовать установленным допускам. Требуется проведение вычислений. Общая продолжительность получения азимута составляет 30-35 минут.
Соответственно нужен хранитель, не имеющий отмеченных недостатков.
Возможность создания такого хранителя существует.
Глава II
ОПИСАНИЕ СПОСОБА СОХРАНЕНИЯ ГЕОДЕЗИЧЕСКОГО НАПРАВЛЕНИЯ
Способ основан на двух свойствах оптических деталей.
Первое свойство - свойство уголкового отражателя - поворот луча света на 180° и прохождение его по одному и тому же пути при неизменном положении источника света.
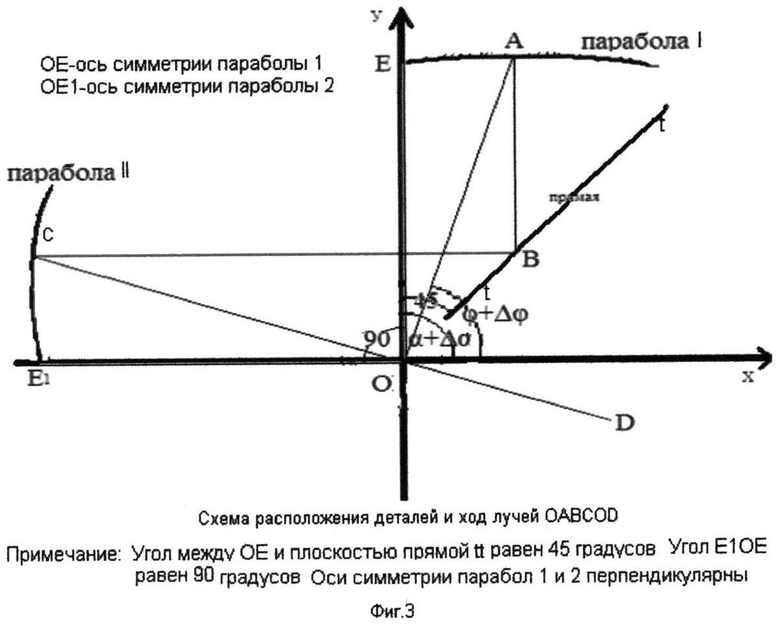
Применяемый в данном способе параболический отражатель оборачивает луч на 90°, используя при этом свойство парабол, если падающий луч проходит через фокус параболы, то луч, отраженный от внутренней поверхности этой параболы, будет параллелен ее оси симметрии [7]. А также, если луч параллелен оси симметрии параболы, то луч, отраженный от внутренней поверхности этой параболы, пройдет через фокус этой параболы (Фиг. 3).
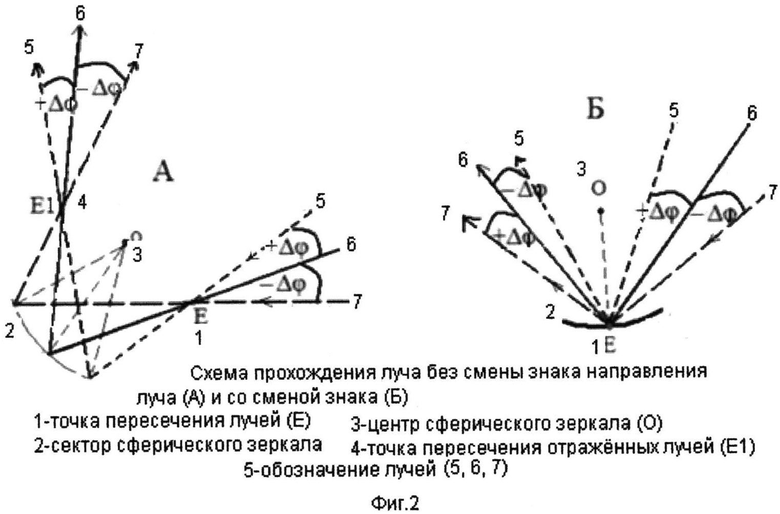
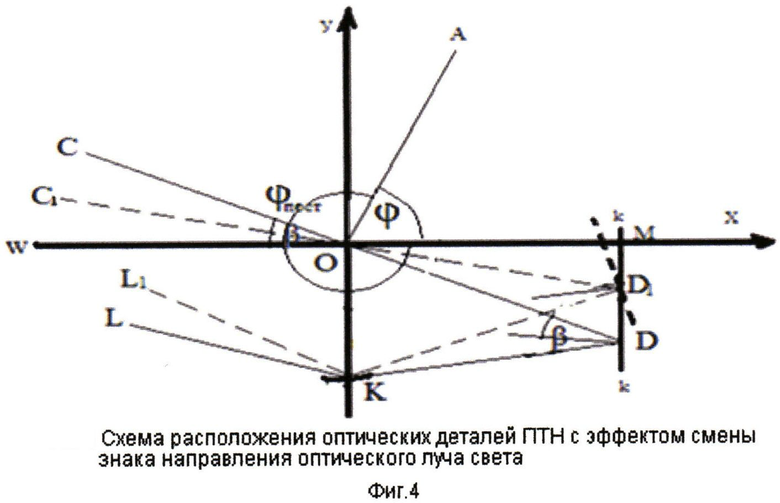
Второе - эффект смены знака направления хода оптического луча света (Фиг. 2Б) при отражении от зеркальной поверхности сектора в районе пересечения лучей при их колебаниях.
На Фиг. 2 в вариантах «А» и «Б» показаны ход оптических лучей света в зависимости от положения точки «Е» пересечения лучей. При пересечении лучей в точке «Е» не на поверхности сектора - прямое направление, т.е. при повороте падающего луча вправо на угол минус Δφ отраженный луч пойдет тоже вправо на тот же угол поворота минус Δφ (Фиг. 2А).
На Фигуре 2Б точка «Е», пересечение лучей, находится на поверхности сектора. В этом случае, при повороте падающего луча вправо на угол минус Δφ, отраженный луч совершит смену знака направления хода оптического луча света перемещение влево на тот же угол Δφ, но со знаком плюс.
Предлагаемый способ сохранения ГН основан на использовании двух указанных выше свойствах оптических деталей. Разместив оптические детали с указанными свойствами на горизонтальных плоскостях, независимо вращающихся вокруг общей вертикальной геометрической оси, и объединив эти плоскости с помощью оптического луча в единое целое, мы получим устройство, позволяющее решить задачу хранения ГН.
С целью создания устройства сохранения ГН следует выполнить следующие действия:
- создать на независимой горизонтальной плоскости I оригинальную систему из параболических отражателей и отражающей плоскости,
отклоняющей отраженный луч на 90° с единой вертикальной геометрической осью вращения, совпадающей с началом общей декартовой системы координат [2] (Фиг. 3);
- создать на независимой горизонтальной плоскости II систему со свойствами смены знака направления хода оптического луча света с единой вертикальной геометрической осью вращения, совпадающей с началом общей декартовой системы координат (Фиг. 4);
- с помощью оптического луча объединить эти две системы.
Для согласования размещения элементов систем на двух независимых плоскостях I и II с общей геометрической осью вращения «О» используем прямоугольную декартову систему координат с началом в точке «О».
На плоскости I с общим геометрическим центром «О», совпадающим с началом декартовой системы координат, в качестве отражающих поверхностей разместим правые ветви парабол I и II (с фокусами в точке «О») и отрезок прямой «tt» (Фиг. 3).
При этом оси симметрии парабол ОЕ и OE1 совпадают по направлению с осями координат и располагаются перпендикулярно друг к другу. Прямая «tt», с отражающей поверхностью, расположена под углом 45° к оси симметрии ОЕ параболы I. Причем, линия продолжения прямой «tt» проходит через центр системы координат «О».
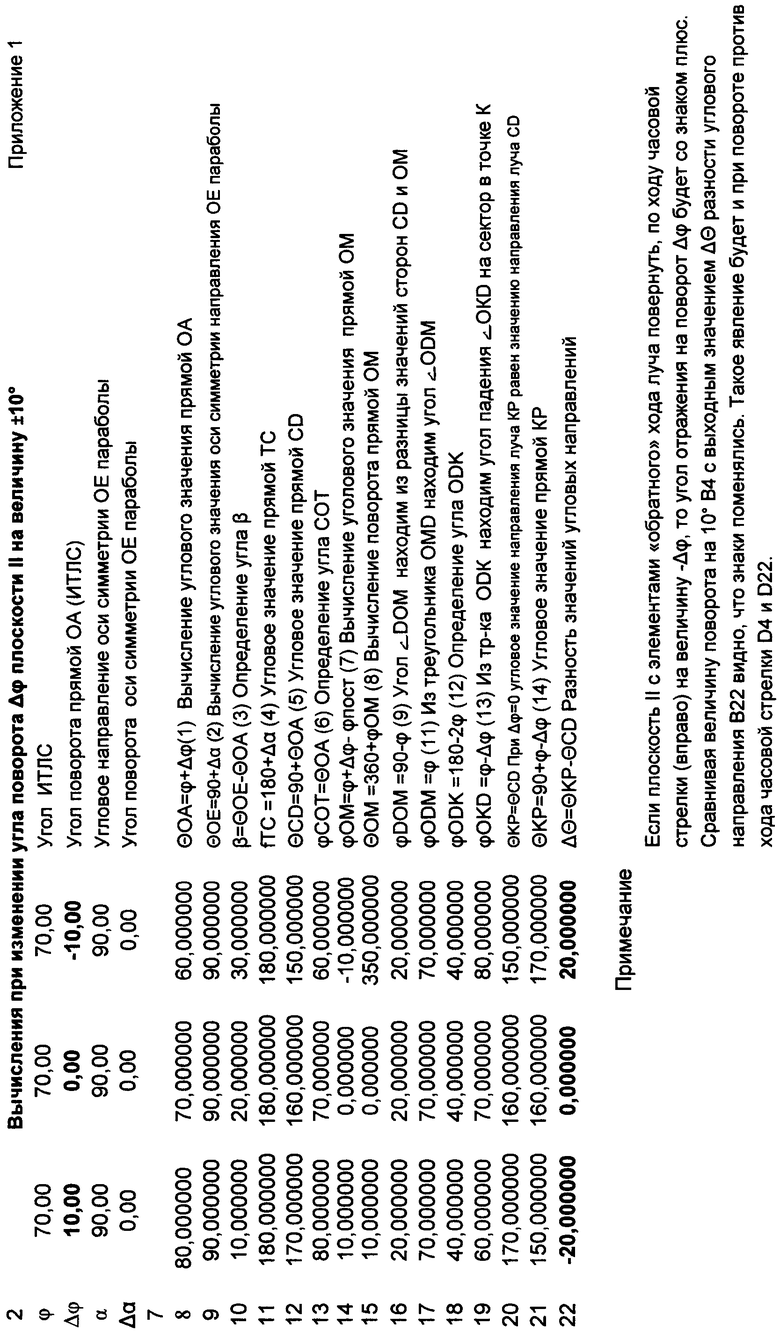
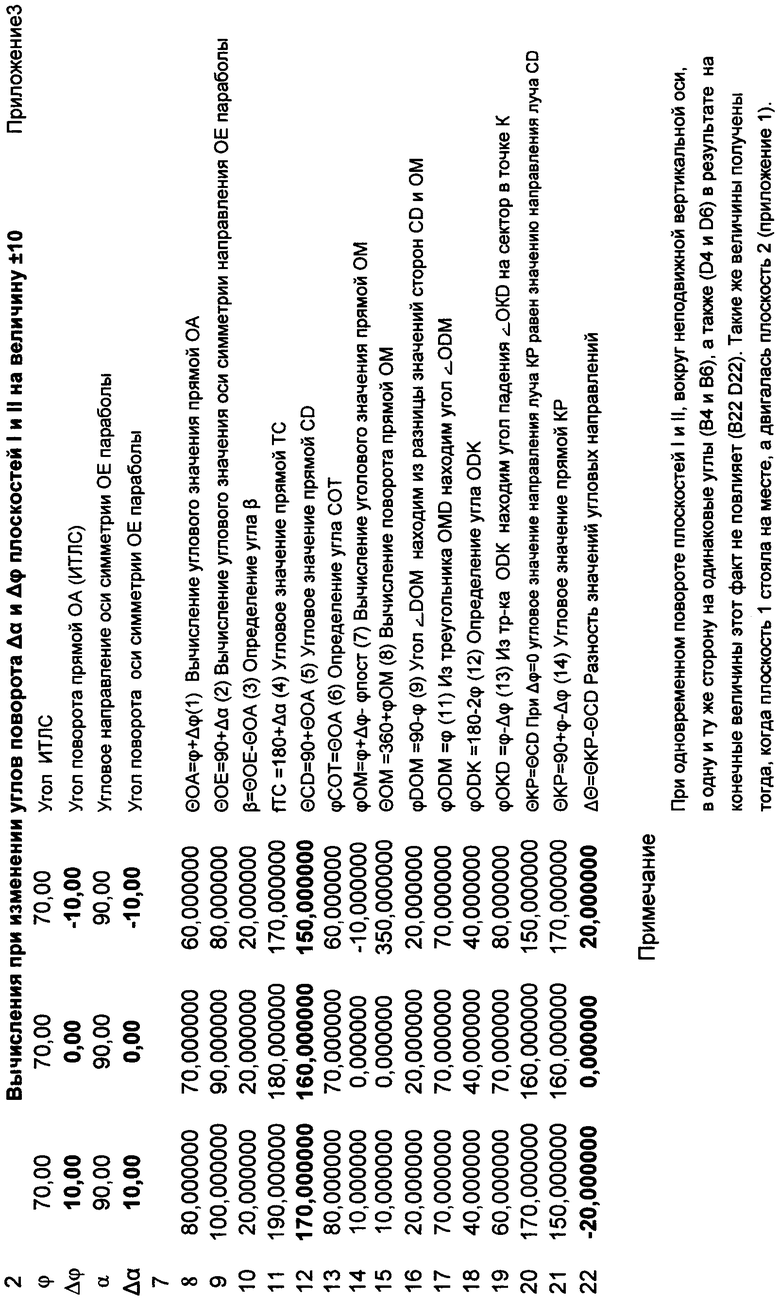
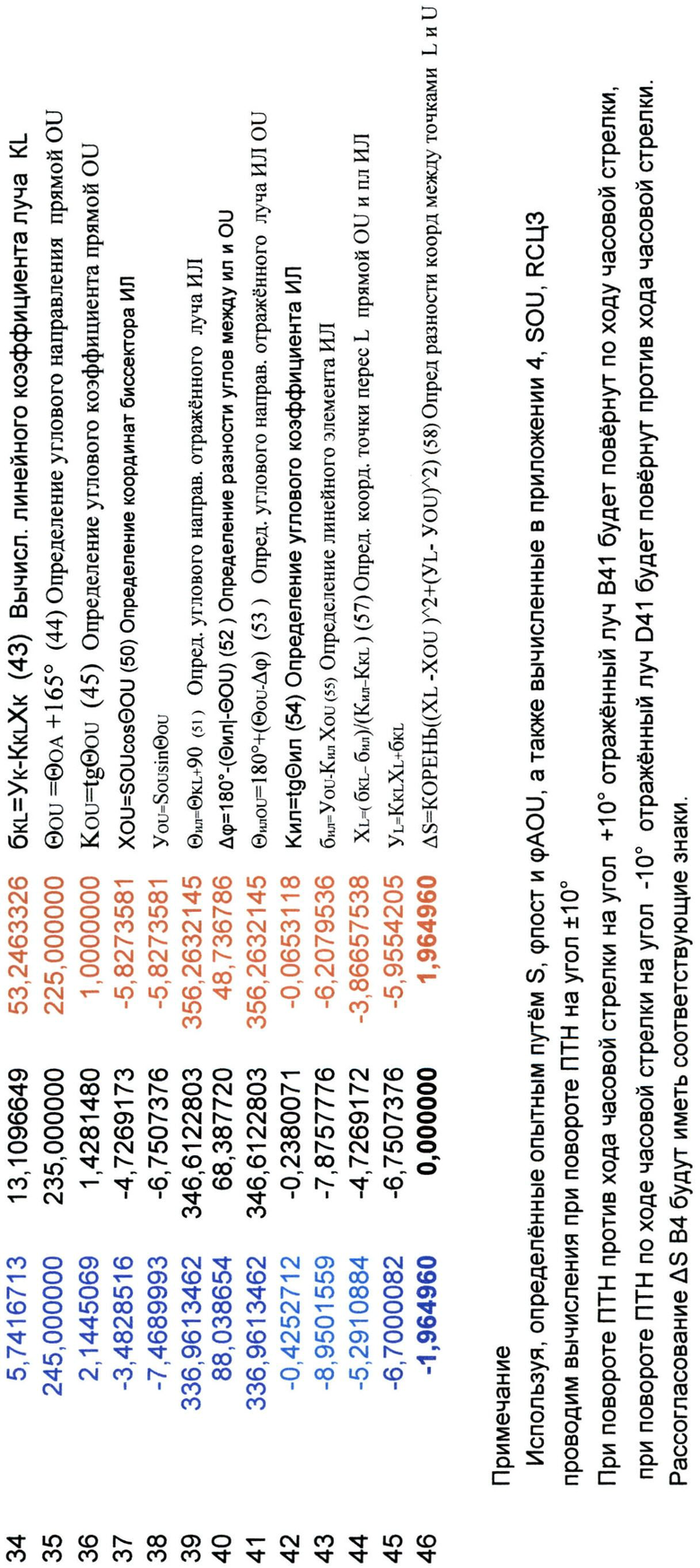
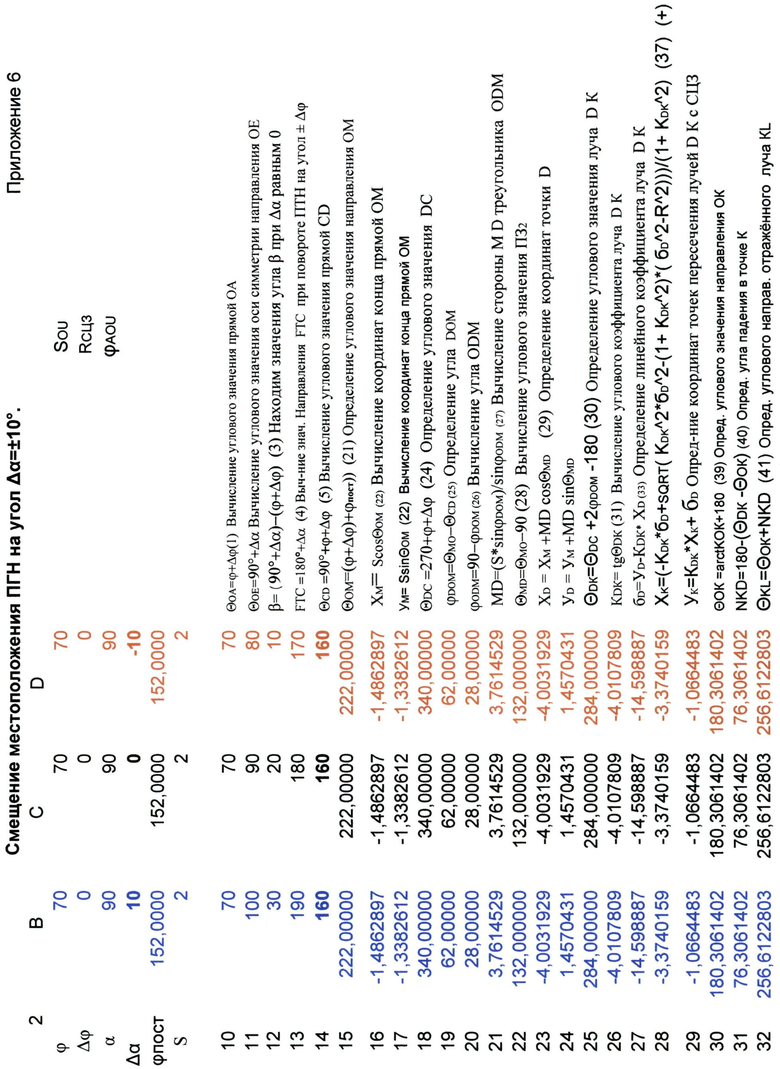
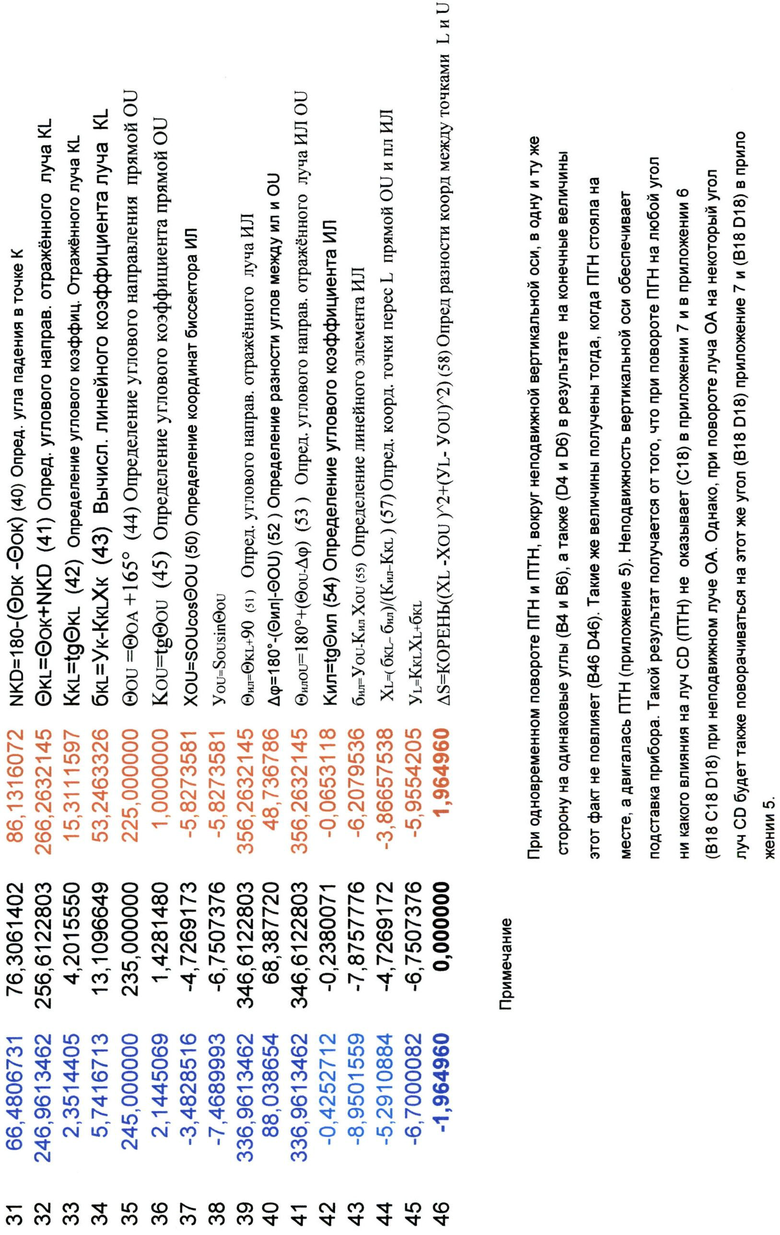
В данном случае используется свойство параболы - если луч ОА исходит из фокуса параболы (точка «О»), то отраженный от внутренней зеркальной поверхности параболы I луч АВ будет идти параллельно оси симметрии параболы ОЕ [2]. И наоборот, если луч ВС приходит параллельно оси симметрии параболы OE1, то после отражения от внутренней отражающей поверхности параболы II луч CD пойдет через фокус параболы II. Фокусы парабол I и II находятся в геометрическом центре системы координат «О» центре вращения, совпадающей с общей геометрической осью вращения плоскостей I и II. Луч ОА (Фиг. 10), в параболическом отражателе, может колебаться в горизонтальном (азимутальном) направлении на углы ±10° в секторе до 20°, тогда луч CD также изменит свое положения от среднего на углы ±10° (Вычисление см. Приложение 1).
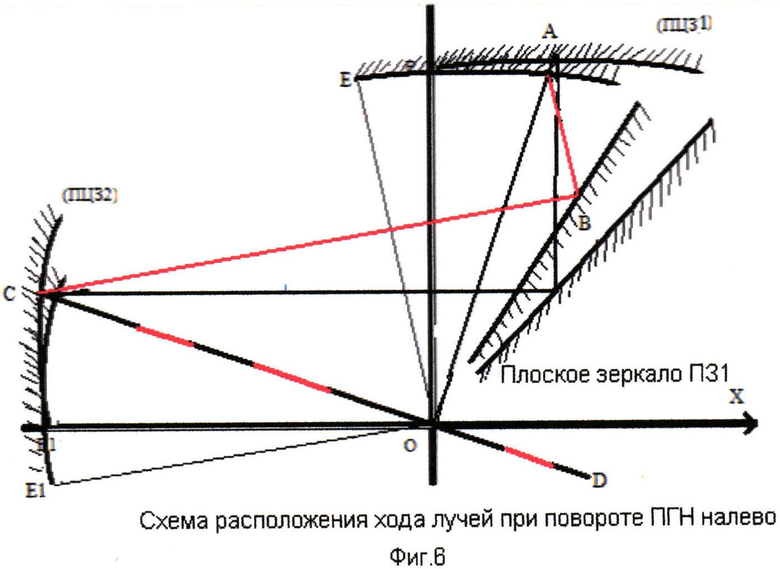
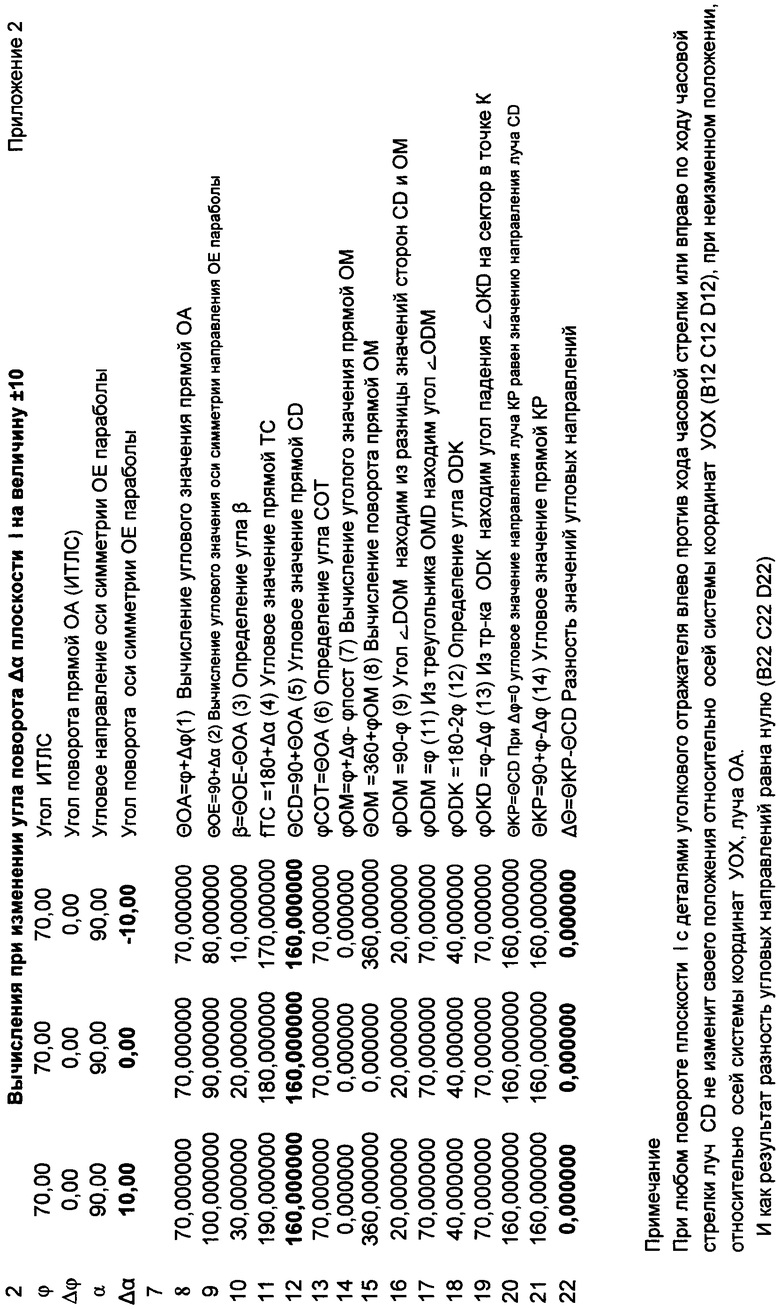
Вращение самого уголкового отражателя (плоскость I) на углы ±10° при неизменном положении луча ОА (плоскость II) относительно парабол, никакого влияния на положение луча CD не оказывает (Фиг. 6) (Вычисление см. приложение 2).
Детали системы с эффектом смены знака направления хода отраженного луча света, - луч ОА, прямая «kk» и сектор с отражающими поверхностями, расположены на второй самостоятельной плоскости II.
Конструктивно две самостоятельные плоскости I и II находятся на общей вертикальной геометрической оси, расположенной в центре системы координат «О». Вращение плоскостей происходит независимо друг от друга (Фиг. 9).
Для вывода формул введем следующие обозначения:
Р - параметр параболы;
φ - среднее значение угла выставки прямой ОА и плоскости II;
Δφ - угол поворота прямой ОА. При повороте вправо, по ходу часовой стрелки знак минус, и наоборот;
α - угловое значение первоначального направления оси симметрии ОЕ параболы I относительно оси ОХ равно 90°, т.е. в среднем положении ось симметрии ОЕ параболы I совпадает с ординатой координат;
Δα - угол поворота оси симметрии ОЕ параболы I. При повороте вправо, по ходу часовой стрелки, знак минус и наоборот.
Формула вычисления углового значения ΘОА прямой ОА имеет следующий вид: 
где φ - значение угла первоначального направления (выставки) прямой ОА и плоскости II;
Δφ - угол поворота прямой ОА от первоначального направления.
Формула вычисления углового значения ΘOE оси симметрии ОЕ параболы I имеет следующий вид:

где α - угловое значение первоначального направления оси симметрии ОБ параболы I относительно оси ОХ равно 90°.
Δα - угол поворота оси симметрии ОЕ параболы I.
Для вывода формул способа сохранения геодезического направления используется схема, показанная на Фиг.9. Здесь плоскости I и II заменены на платы грубой и точной наводок соответственно.
На схеме (Фиг.9) рассмотрим треугольник ДОТВ. В этом треугольнике углы ∠ТВО и ∠ТОВ при гипотенузе ОВ равны 45°, соответственно треугольник ДОТВ - равнобедренный, поэтому стороны ОТ и ТВ равны между собой.
Сторона ВС треугольника ДОВС параллельна оси симметрии OE1 параболы II. Сторона AB1 треугольника ΔOAB1 параллельна оси симметрии ОЕ параболы I.
Исходя из условий построения, параболы I и II равны между собой, поэтому стороны AB1 и СТ треугольников ΔOAB1 и ΔОСТ равны между собой т.к. точки пересечения А и С парабол I и II находятся на одинаковом расстоянии от осей парабол ОЕ и OE1 и стороны OB1 и ОТ равны между собой.
Если две стороны и угол, заключенный между ними одного треугольника ΔOAB1, равны двум сторонам и углу между ними другого треугольника ΔOCT, то соответственно треугольники равны между собой (по первому признаку равенства треугольников [3]). Значит стороны ОА и ОС равны между собой.
В равных треугольниках, соответственно углы равны между собой.
Направление оси симметрии ОЕ параболы I совпадает с осью ординат и равно 90°. Таким образом, ось симметрии ОЕ параболы I определяет среднее положение самостоятельной плоскости I с элементами параболического отражателя.
Так как при изменении положения самостоятельной плоскости I с элементами параболического отражателя на горизонтальный угол «±Δα», стороны АВ и ВС меняют свое местоположение и размер, то нужно вычислять углы ∠OAB1 и ∠ВСО с использованием ∠EOB1.
Угол ∠EOB1=90°. Для определения значения угла ∠OAB1 сначала по разности двух углов ∠EOB1 и ∠AOB1 находим значение угла ∠EOA=β по следующей формуле:

Так как углы ∠ЕОА и ∠OAB1 равны как соответственные при двух параллельных прямых и секущей [3], то угол ∠ОАВ1=β.
При равенстве треугольников ΔOAB1 и ДОСТ угол ∠ОСТ будет также равен β.
Так как при вращении плоскости I на величину «±Δα» отраженный луч ВС от прямой «tt» идет параллельно оси симметрии OE1, то угловое значение прямой ТС определяется следующим выражением:

Угловое значение прямой CD равно следующему выражению:

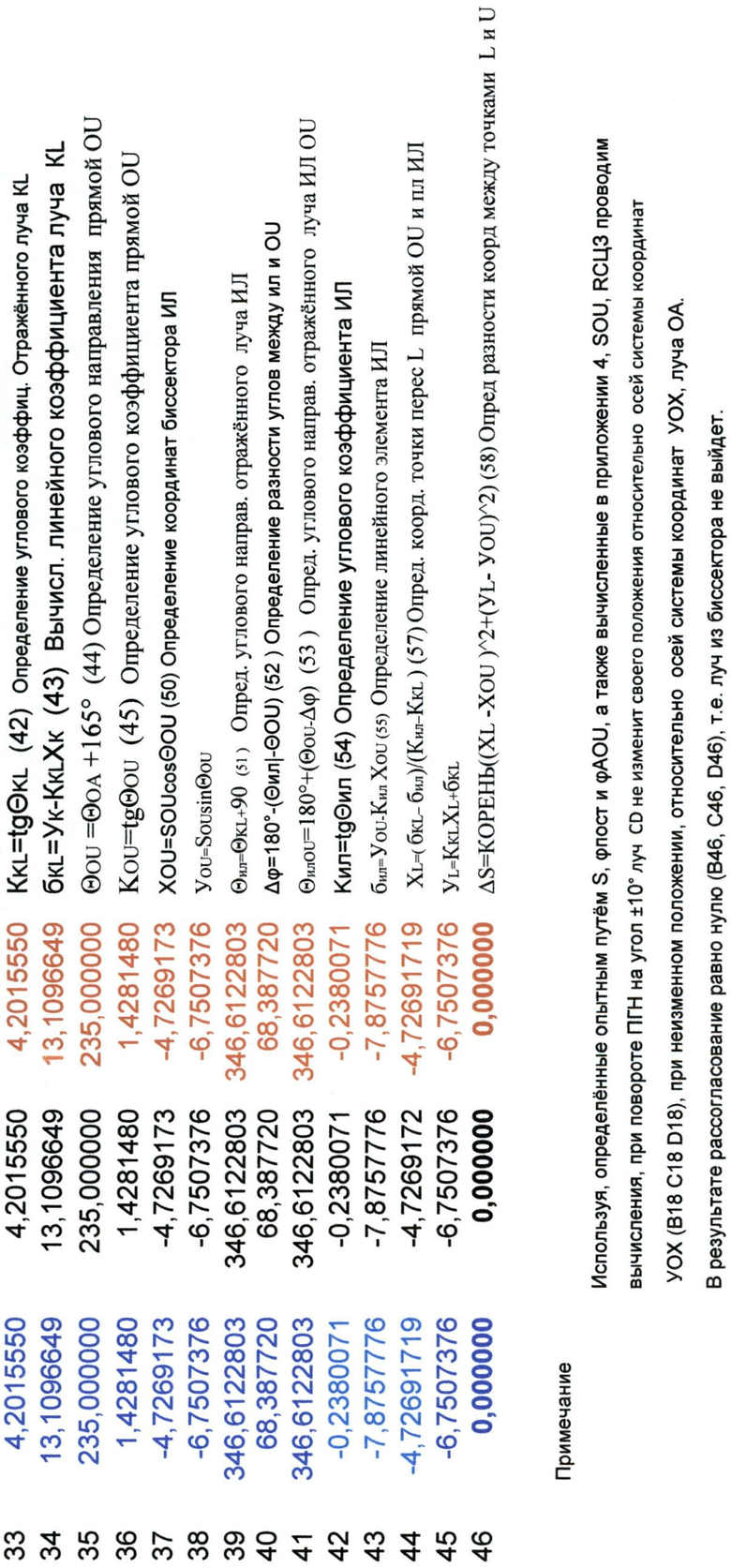
Из формулы (5) видно, что значения Δα, определяющие положение оси симметрии параболы I относительно осей системы координат УОХ, отсутствуют. Это означает, что при любом повороте плоскости I с деталями параболического отражателя влево против хода часовой стрелки или вправо по ходу часовой стрелки луч CD не изменит своего положения относительно осей системы координат УОХ, при неизменном положении, относительно осей системы координат УОХ, луча ОА.
Таким образом, луч CD может использоваться для связи между двумя самостоятельными плоскостями I и II.
Так как два треугольника (Фиг. 9) - ΔOAB1 и ΔОСТ равны между собой, то и ∠AOB1=∠COT. Угол ∠СОТ соответствует следующему выражению:

Угол ∠KOD равен углу ∠СОТ как углы вертикальные.
На независимой плоскости II (Фиг. 4) детали системы с эффектом смены знака направления хода отраженного луча (прямая ОА, прямая «kk» и сектор с центром вращения в точке «0»), неподвижно закреплены между собой. При этом постоянный тупой угол ∠АОМ между прямыми ОА и «kk» имеет постоянное значение φпост.
В частном случае для дальнейших рассуждений, наглядности и простоты вывода формул примем следующий ряд допущений:
- первое - пересечение лучей DK в одной точке «К»;
- второе - точка К находится на оси ординат;
- третье - прямая «kk» перпендикулярна оси абсцисс. Тупой угол ∠АОМ=φпост вычисляется по следующей формуле 
В данном случае угол «φ» определили априорно в зависимости от того, какой угол падения будет прямой CD на прямую «kk».
- четвертое - радиус сектора, с центром вращения в точке «О», равен ОК.
При принятых выше допущениях, производятся простые вычисления только значений углов и направлений без координат точек пересечения прямых с деталями плоскостей I и II.
Согласно принятому допущению строим прямую «kk» перпендикулярно оси абсцисс при Δφ=0. Для этого возьмем отрезок прямой ОМ длиной «s». Прямая ОМ (Фиг. 4) перпендикулярна прямой «kk». Отложим постоянный тупой угол ∠АОМ=φпост между лучом ОА и прямой ОМ.
Угловое значение направления ΘОМ прямой ОМ, в среднем положении, при Δφ=0 направляет прямую ОМ по оси «Х» (Фиг. 4).
В конце прямой ОМ в точке «М» восстанавливаем перпендикуляр «kk».
При повороте независимой плоскости II с элементами системы смены знака направления хода луча на угол ±Δφ, все элементы (луч ОА, прямая «kk» и сектор с центром вращения в точке «0») этой плоскости II повернутся на тот же угол ±Δφ (Фиг. 4).
При этом угловое значение направления ΘОМ прямой ОМ вычисляется по следующей формуле:

Угол ∠DOM из треугольника ΔOMD (Фиг. 3) находим из разницы значений сторон CD и ОМ по следующей формуле:

В данном случае угол ∠COE1 (Фиг. 9) равен углу ∠B1OD как вертикальные [3] т.к. у них общая ось абсцисс и также равен углу ∠DOM, при условии если при этом сторона ОМ совпадает с осью абсцисс и Δφ=0.
В общих случаях угол ∠DOM (Фиг. 9) не равен углу ∠COE1, т.к. сторона ОМ подвижна и поворот ее равен ±Δφ.
Из треугольника ΔOMD (Фиг. 9) находим угол ∠ODM, который вычисляется по следующей формуле:

Падающий луч CD (Фиг. 9) отражается от плоскости прямой «kk» по направлению луча DK. Угол ∠ODK определяем по следующей формуле:

Из треугольника ΔODK (Фиг. 9) находим угол падения ∠OKD на поверхность сектора с центром вращения в точке «О» в точке К по следующей формуле:

Угол отражения ∠ОКР равен ∠OKD (Фиг. 9) углу падения.
φОКР=φOKD.
Угловое значение прямой КР равно следующему выражению:

При Δφ=0 угловое значение направления луча КР равно значению направления луча CD. ΘКР=ΘCD 90°+φ-0=90°+φ+0, это значит, что эти два луча параллельны.
Если плоскость II с элементами смены знака направления хода оптического луча повернуть по ходу часовой стрелки (вправо) на величину -Δφ, то угол отражения на поворот Δφ будет со знаком плюс (Фиг. 2Б).
Угловое значение направления луча CD будет равно выражению:

Угловое значение направления луча КР (Фиг. 9) в этом случае будет равно выражению 
Если плоскость II с элементами смены знака направления хода оптического луча повернуть против хода часовой стрелки (влево) на величину +Δφ, то угол поворота Δφ луча, отраженного от СЦЗ, будет со знаком минус (Фиг. 2Б).
Угловое значение направления луча CD будет равно выражению:

Угловое значение направления луча КР в этом случае будет равно выражению 
Далее рассмотрим определение разности ΔΘ значений направлений лучей DC и КР в разных ситуациях положения Δφ.
Например, при повороте плоскости II с элементами смены знака направления хода оптического луча по ходу часовой стрелки (вправо) на величину -Δφ, разность будет равна выражению:
Если плоскость II с элементами смены знака направления хода оптического луча не поворачивается и Δφ=0, то в этом случае разность будет равна выражению ΔΘ=ΘКP-ΘCD=90°+φ-90°-φ=0.
При повороте плоскости II с элементами смены знака направления хода оптического луча против хода часовой стрелки (влево) на величину +Δφ разность будет равна следующему выражению:

Таким образом, благодаря эффекту смены знака направления хода оптического луча, ликвидирована неоднозначность взаимного положения двух самостоятельных плоскостей I и II параболического отражателя и эффекта смены знака направления хода оптического лучей.
Если разность ΔΘ не равна нулю, это означает, что сместилась со своего места плоскость II с элементами смены знака направления хода оптического лучей u только эта плоскость. Для восстановления первоначального положения хода лучей нужно повернуть плоскость II с элементами системы смены знака направления хода оптических лучей до положения, при котором Δφ станет равным нулю. В этом случае луч ОА займет свое первоначальное положение, т.е. сохранит геодезическое направление, которое было передано на него.
В подтверждение вышеизложенного, на основе использования выведенных формул 1-20 и правил, применяемых в Excel [5], приведены результаты вычислений в Приложениях 1-3.
Глава III
ПРИМЕНЕНИЕ СПОСОБА
Предложенный способ сохранения геодезического направления можно применить при изготовлении переносного устройства, предназначенного для хранения геодезического направления.
Принципиально устройство состоит из следующих частей:
- вертикальной оси устройства;
- платы грубой наводки (ПГН)
- платы точной наводки (ПТН).
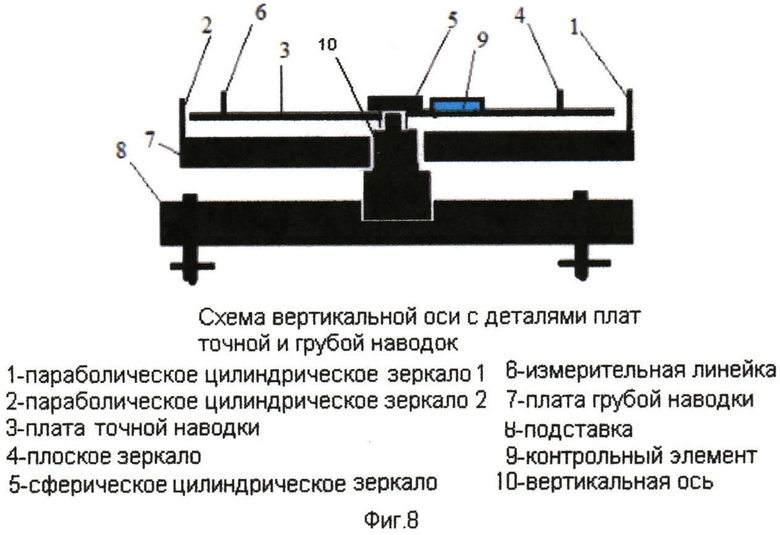
Чтобы воплотить описанный способ хранения ГН в реальное устройство, нужно на математические понятия плоскости I и II и фигур-парабол, прямых и сектора ввести физические понятия ПГН и ПТН и фигуры ПЦЗ1 и ПЦЗ2 (Фиг. 5) с внутренними поверхностями, на которых нанесено зеркальное напыление и их фокусы (F1 и F2) совмещены с центром вращения платы грубой наводки устройства и центром вращения устройства «О», ПЗ1 и ПЗ2 с внешними поверхностями, на которых нанесено зеркальное напыление, СЦЗ - с внутренней поверхностью, на которой нанесено зеркальное напыление, центр СЦЗ совпадает с центром вращения прибора «О», а также с центром вращения ПТН и ПГН. Дополнительно ввести на ПТН источник тонкого луча света (ИТЛС). Для фиксации отклонения луча от среднего положения поставить измерительную линейку (ИЛ) для хранения геодезического направления установить на ПТН контрольный элемент (КЭ) (Фиг.9).
ПГН прибора служит для размещения параболических цилиндрических зеркал (ПЦЗ1, ПЦЗ2) и плоского зеркала (ПЗ1) (Фиг.9).
ПЦЗ1 и ПЦЗ2 с внутренними поверхностями, на которых нанесено зеркальное напыление, смонтированы на плате грубой наводки и их фокусы (F1 и F2) совмещены с центром вращения платы грубой наводки устройства и центром вращения прибора «О».
В данном случае используются свойство параболы - если луч исходит из фокуса параболы, то отраженный луч от внутренней поверхности параболы, на которой нанесено зеркальное напыление будет идти параллельно оси симметрии параболы и наоборот. Если луч приходит параллельно оси симметрии параболы, то после отражения от внутренней поверхности параболы, на которой нанесено зеркальное напыление, луч пойдет в фокус параболы (Фиг.6).
В приборе ПЦЗ1 имеет ось симметрии ОЕ. ПЦЗ2 имеет ось симметрии OE1. На плате грубой наводки устройства закрепляются на своих местах параболические цилиндрические зеркала ПЦЗ1 и ПЦЗ2 с внутренними поверхностями, на которых нанесено зеркальное напыление, и плоское зеркало ПЗ1 с внешней поверхностью, на которой нанесено зеркальное напыление.
В устройстве ПЦЗ1 имеет ось симметрии ОЕ. ПЦЗ2 имеет ось симметрии OE1. На плате грубой наводки устройства закрепляются на своих местах параболические цилиндрические зеркала ПЦЗ1 и ПЦЗ2 с внутренними поверхностями, на которых нанесено зеркальное напыление и плоское зеркало ПЗ1 с внешней поверхностью, на которой нанесено зеркальное напыление.
При этом оси симметрии ОЕ и OE1 параболических цилиндрических зеркал ПЦЗ1 и ПЦЗ2 находятся в перпендикулярном отношении друг к другу и пересекаются в центре вращения «О». Плоское зеркало ПЗ1 крепится под углом 45 градусов к оси симметрии ОБ параболического зеркала ПЦ31. Причем линия продолжения зеркала ПЗ1 проходит через геометрический центр вращения «О» и платы грубой наводки устройства. Ось вращения плоского зеркала ПЗ1 находится в точке «О».
Такое расположение деталей платы грубой наводки устройства ПЦЗ1, ПЗ1 и ПЦЗ2 создает эффект параболического отражателя. Поэтому в данном случае используется свойство уголкового отражателя - посылать отраженный луч по одному и тому же пути, независимо от поворота граней уголкового отражателя вокруг вертикальной оси при неподвижном положении источника света (Фиг.6) (Вычисление см. Приложение 6).
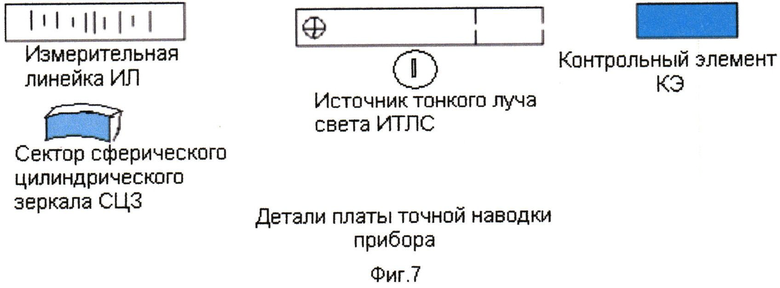
На ПТН устройства смонтированы источник тонкого луча света (ИТЛС), плоское зеркало ПЗ2, сектор сферического цилиндрического зеркала (СЦЗ), измерительная линейка (ИЛ) и контрольный элемент (КЭ) (Фиг.7 и 9).
ИТЛС служит для получения тонкого луча света. Луч света, исходящий из ИТЛС, в своей проекции представляет собой вертикальную полоску или точку (Фиг.7).
ИТЛС может быть и другой конструкции (кроме лазера), вплоть до применения волоконной оптики. Главное условие - тонкий луч света своим продолжением должен проходить через центр вращения устройства «О».
ИЛ служит для оценки величины отклонения луча от биссектора, и определения направления разворота платы точной наводки устройства для приведения луча в биссектор, и, соответственно, восстановления первоначального положения ПТН устройства в пространстве.
ИЛ имеет градуировку в виде биссектора и штриховых делений, нанесенных на стеклянную пластинку (Фиг.7).
СЦЗ с внутренней или внешней отражающей поверхностью служит для смены знака направления хода оптического луча падающему лучу.
КЭ, закрепленный на ПТН, служит для фиксации геодезического направления, переданного на него геодезическим или астрономическим способом при изготовлении прибора. КЭ может быть призма.
Эти детали крепятся на общей ПТН устройства, сама плата вращается вокруг оси на остром конусе совмещенном с геометрической осью устройства точкой «О».
И эти самостоятельные платы точной и грубой наводок с помощью оптического луча CD объединяются в единое целое.
Конструктивно эти две самостоятельные платы должны находиться соосно на общей вертикальной оси. Вращение ПГН и ПТН устройства должно происходить независимо друг от друга.
ПГН устройства может колебаться в горизонтальном (азимутальном) направлении на углы ±10° от среднего положения, при этом ПТН не изменит своего первоначального положения. В этом случае ПТН и есть сам хранитель ГН (Вычисление см. Приложение 6).
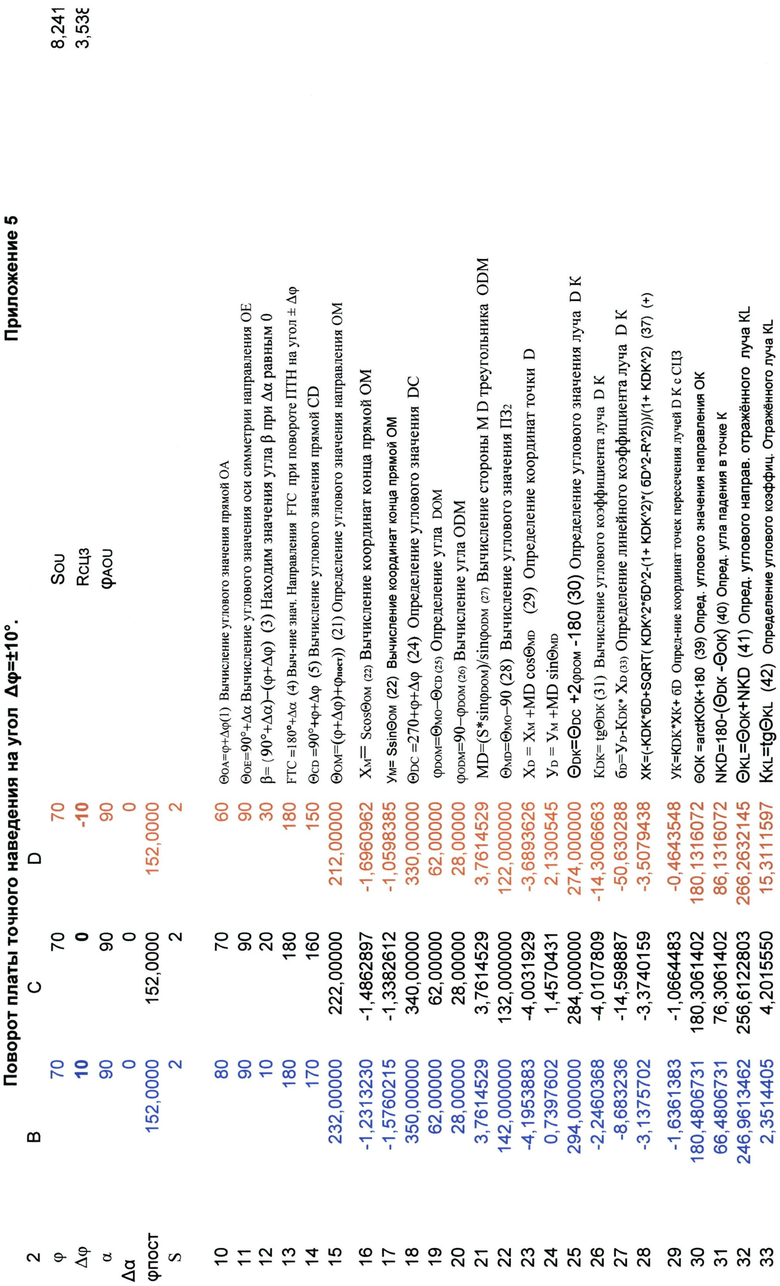
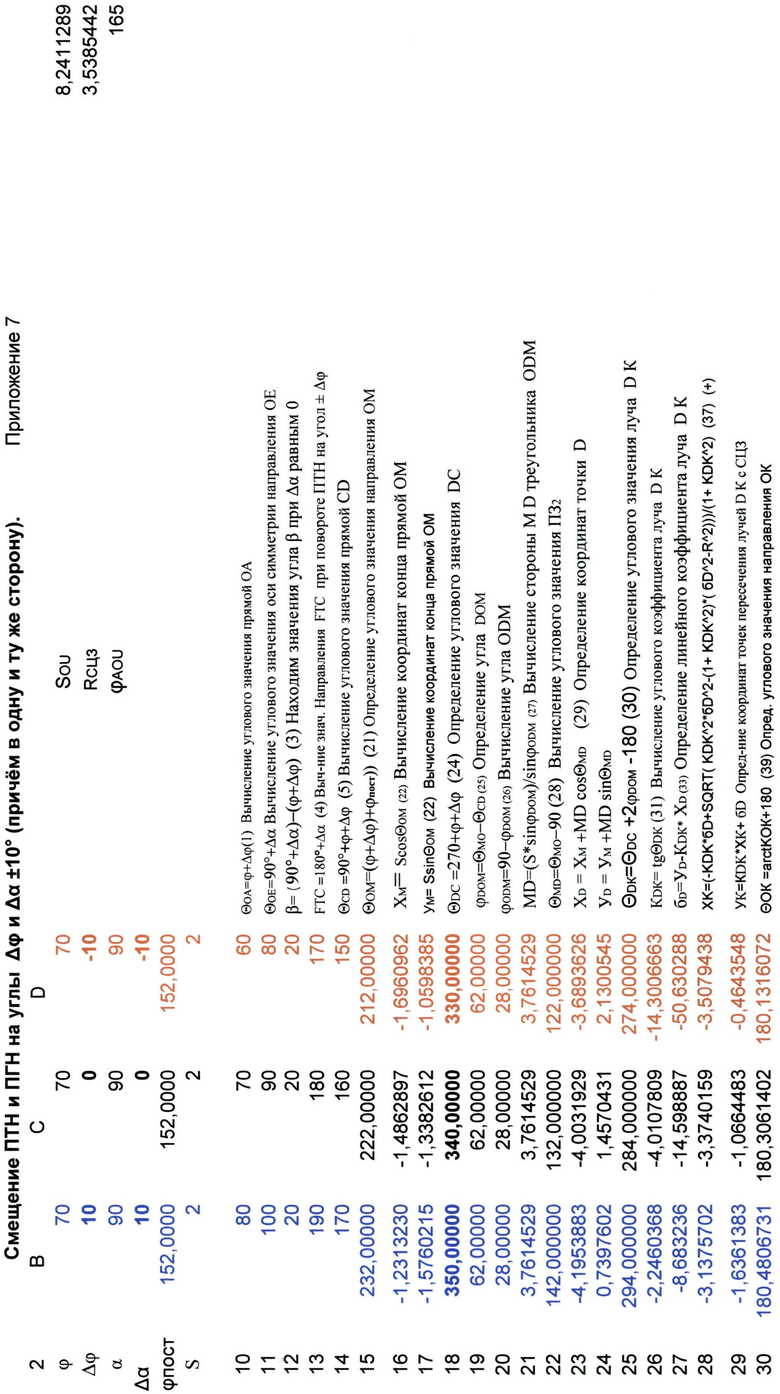
ПТН устройства тоже может колебаться в горизонтальном (азимутальном) направлении, независимо от колебания ПГН, на углы ±10° от среднего положения, при этом выходной луч в конечном случае будет менять знак направления на противоположный направлению движения ПТН (Вычисление см. Приложение 5). Это будет свидетельствовать о том, что ПТН устройства отклонилась от своего первоначального положения.
Вертикальная ось устройства (Фиг. 8) состоит из системы осей и втулок разных диаметров, которые соединяют платы точной, грубой наводок и подставку прибора [6]. Такое сочетание осей обеспечивает возможность независимого вращения плат точной и грубой наводок устройства вокруг одной геометрической оси, являющейся вертикальной осью устройства.
При включении ИТЛС луч света (Фиг. 9), пройдя над центром вращения устройства точкой «О» (одновременно в точке «О» находятся фокусы «F» и «F2» парабол (ПЦЗ1 и ПЦЗ2), попадает на зеркальную поверхность параболического цилиндрического зеркала ПЦЗ1 платы грубой наводки устройства в точку «А».
Отразившись в точке «А» от зеркальной поверхности ПЦЗ1, луч пойдет параллельно оси симметрии ОЕ параболы ПЦЗ1 и попадет на зеркальную поверхность плоского зеркала ПЗ1 платы грубой наводки устройства в точку «В». Так как ПЗ1 находится под углом 45° к оси симметрии ОЕ ПЦЗ1, то отраженный луч от зеркальной поверхности ПЗ1 в точке «В» пойдет перпендикулярно к оси симметрии ОЕ ПЦЗ1 и параллельно оси симметрии OE1 второго ПЦЗ2 платы грубой наводки устройства в точку «С» (оси симметрии ПЦЗ1 и ПЦЗ2 взаимно перпендикулярны).
Отразившись в точке «А» от зеркальной поверхности ПЦЗ1, луч пойдет параллельно оси симметрии ОЕ параболы ПЦЗ1 и попадет на зеркальную поверхность плоского зеркала ПЗ1 платы грубой наводки устройства в точку «В». Так как ПЗ1 находится под углом 45° к оси симметрии ОЕ ПЦЗ1, то отраженный луч от зеркальной поверхности ПЗ1 в точке «В» пойдет перпендикулярно к оси симметрии ОЕ ПЦЗ1 и параллельно оси симметрии OE1 второго ПЦЗ2 платы грубой наводки устройства в точку «С» (оси симметрии ПЦЗ1 и ПЦЗ2 взаимно перпендикулярны).
Отраженный луч от зеркальной поверхности второго ПЦЗ2 в точке «С» пойдет через фокус «F2» параболического цилиндрического зеркала 2, т.е. через центр вращения устройства «О» (фокус F2 ПЦЗ2 совмещен с центром вращения прибора О).
В устройства при неподвижном источнике света ИТЛС луч, отразившейся от граней ПЦЗ1, ПЗ1 и ПЦЗ2 платы грубой наводки прибора, независимо от поворота этих зеркал вокруг вертикальной оси устройства «О» в секторе ±10° (Фиг.6), пойдет по одному и тому же пути через точки «С», «О» и «D», отразившись от зеркальной поверхности плоского зеркала ПЗ2 и СЦЗ платы точной наводки устройства, попадет в биссектор измерительной линейки ИЛ (Приложение 6).
Таким образом, луч света CD является оптическим связующим звеном между платами грубой и точной наводок устройства.
На Фиг.9 показаны платы грубой и точной наводок.
Луч CD, пройдя центр вращения прибора «О», попадает на зеркальную поверхность плоского зеркало ПЗ2 на плате точной наводки устройства в точку «D». Отразившись от зеркальной поверхности ПЗ2 в точке «D» (при среднем положении ИТЛС), луч света попадает на зеркальную поверхность сферического цилиндрического зеркала СЦЗ. Отразившись от зеркальной поверхности СЦЗ в точке «К», луч света идет в точку «Р» (Фиг.9).
При первоначальной настройки устройства, когда включен ИТЛС (в среднем положении), измерительная линейка устанавливается и закрепляется таким образом, чтобы отраженный луч был в биссекторе измерительной линейки в точке «L» (Фиг.9).
Этим самым закрепляется положение ИТЛС, ПЗ2, СЦЗ и ИЛ на ПТН прибора. В дальнейшем при любом повороте ИТЛС влево или вправо луч выйдет из биссектора ИЛ (Фиг.10). Это будет свидетельствовать о том, что плата точной наводки устройства отклонилась от своего первоначального положения. И чтобы восстановить первоначальное положение, нужно повернуть ПТН вместе с ИТЛС и ввести луч в биссектор ИЛ.
При повороте платы точной наводки устройства все детали ПТН (ИТЛС, ПЗ2, СЦЗ, КЭ и ИЛ) поворачиваются вместе с платой.
Вращение ИТЛС по азимуту в секторе 20° осуществляется вокруг вертикальной оси устройства. В независимости от вращения ПГН. При этом луч света, исходящий из ИТЛС представляет собой вертикальную полоску или точку. Продолжение луча проходит над центром вращения деталей устройства.
Вращение ИТЛС вместе с ПТН по азимуту в секторе 20° осуществляется вокруг вертикальной оси устройства. В независимости от вращения ПГН. При этом луч света исходящий из ИТЛС представляет собой вертикальную полоску или точку. Продолжение луча проходит над центром вращения деталей устройства точкой «О» (Фиг. 10).
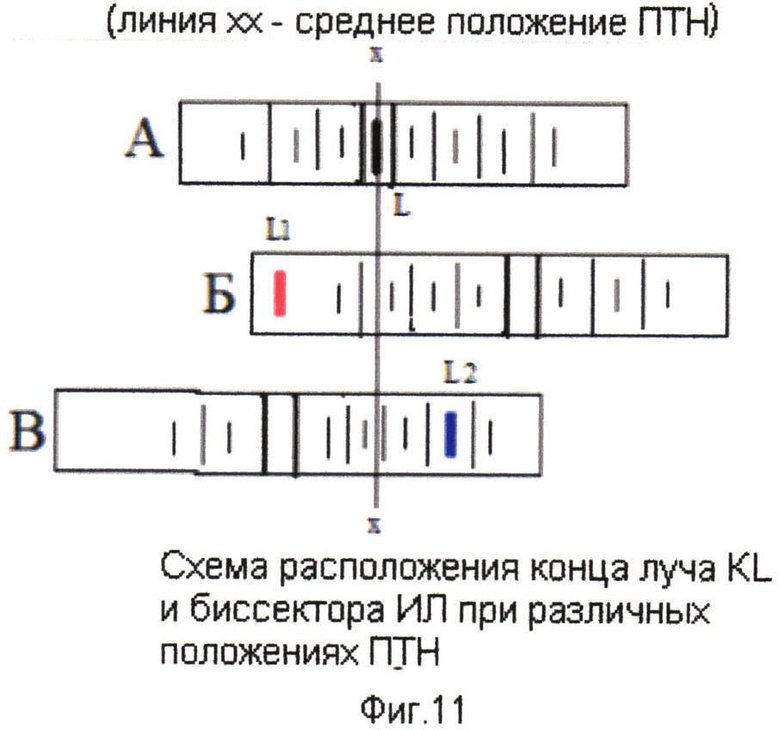
Среднее положение ИТЛС в секторе 20° зафиксировано биссектором на ИЛ (конечный отрезок луча KL должен находится в центре биссектора ИЛ (положение «А» Фиг. 11).
При повороте ИТЛС вправо на какой-либо угол (положение «Б» Фиг. 11) выходной луч KL пойдет по поверхности ИЛ влево в точку «L1», в то время как все детали платы точной наводки устройства ИТЛС, ПЗ2, СЦЗ и ИЛ с биссектором пойдут вправо.
При повороте ИТЛС влево на какой-либо угол (положение «В» Фиг. 11) выходной луч KL пойдет по поверхности ИЛ вправо в точку «L2», в то время как все детали платы точной наводки устройства ИТЛС, ПЗ2, СЦЗ и ИЛ с биссектором пойдут влево.
В результате, луч выйдет из биссектора ИЛ. Это будет означать, что ПТН изменила свое положение в пространстве. Чтобы восстановить первоначальное положение ПТН, нужно повернуть ПТН в обратном направлении и ввести луч в биссектор ИЛа.
Таким образом, мы избавились от неопределенности в отношении смещения элементов хранителя от своего первоначального положения. Если луч света на поверхности ИЛ не в биссекторе, то это означает только одно,
что плата точной наводки устройства изменила свое первоначальное положение.
Глава IV
МАТЕМАТИЧЕСКОЕ ОБОСНОВАНИЕ
Все формулы, выведенные во второй главе, пригодны для математического обоснования работоспособности устройства. Вычисления будут проводиться в декартовой системе координат (Вычисление см. Приложение 5).
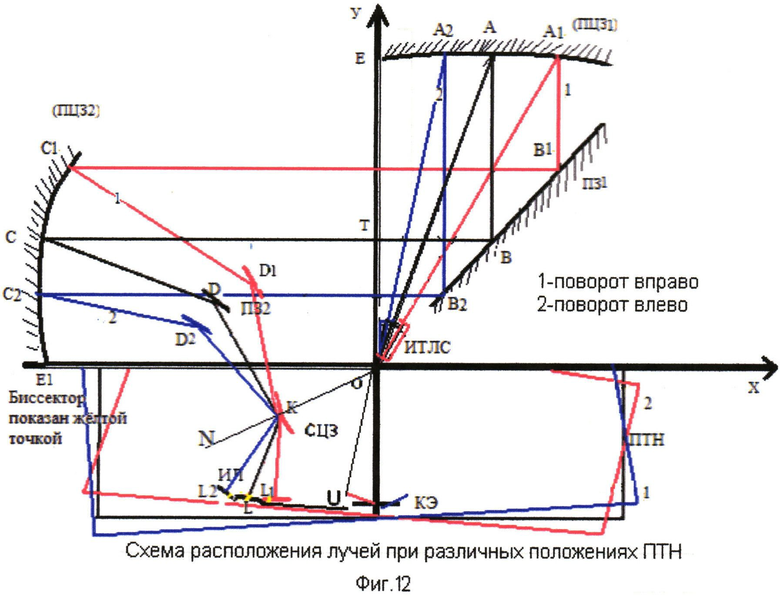
При разработки прибора, для хранения геодезического направления, проведена небольшая перестановка второго плоского зеркала ПЗ2 по сравнению со схемой на Фиг.12.
Перенесение ПЗ2 (Фиг.12) во вторую четверть перед центром вращения «О» из четвертой четверти, обусловлено несколькими причинами.
Во-первых, при отражении луча CD от ПЗ2 углы падения на СЦЗ острее, чем при отражении от внутренней поверхности СЦЗ.
Во-вторых, отраженный луч KL от внешней зеркальной поверхности СЦЗ идет в третью четверть, где нет никаких препятствий.
Для вывода формул и проведения вычислительных действий исключим принятые ранее в частном порядке следующие допущения:
первое - пересечение лучей DK происходит не в одной точке, а в некотором треугольнике;
второе - точка «К» может находиться не только на оси ординат, поэтому и вычисляется;
третье - прямая «kk», или зеркало ПЗ2, в общем случае не должна быть перпендикулярной к оси абсцисс при Δφ=0;
четвертое - радиус сектора СЦЗ вычисляется.
Так как при неизменном положении луча ОА размер параметров ПЦЗ1 и ПЦЗ2 не влияет на угловые значения направления луча CD, поэтому вычисления на ПГН будут производиться только для угловых значений направлений и углов без координат по формулам (1-5).
Далее определим исходные данные прибора:
Р - параметры параболических цилиндрических зеркал;
φ - среднее значение угла выставки источника тонкого луча света (ИТЛС) (прямой ОА). Формула вычисления углового значения ΘOA имеет следующий вид: ΘOA=φ+Δφ;
Δφ - угол поворота ИТЛС (прямой ОА). При повороте вправо, по ходу часовой стрелки знак минус, и наоборот;
α - угол оси симметрии ОЕ параболического цилиндрического зеркала I (ПЦЗ1) принят равным 90°, т.е. в среднем положении оси симметрии ОЕ ПЦЗ1 совпадает с ординатой координат. Формула вычисления углового значения ΘOE имеет следующий вид: ΘOE=α+Δα=90°+Δα;
Δα - угол поворота оси симметрии ОЕ ПЦЗ1. При повороте вправо, по ходу часовой стрелки, знак минус, и наоборот.
Р1=18 см; Р2=18 см;
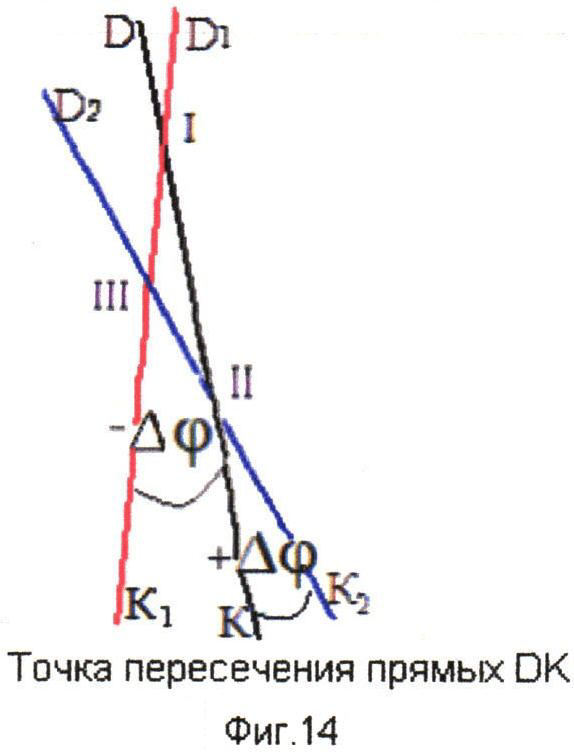
Так как пересечение лучей DK, D1K1 и D1K1 происходит не в одной точке, а в некотором треугольнике (Фиг.14), то радиус ОК сектора сферического цилиндрического зеркала должен вычисляться.
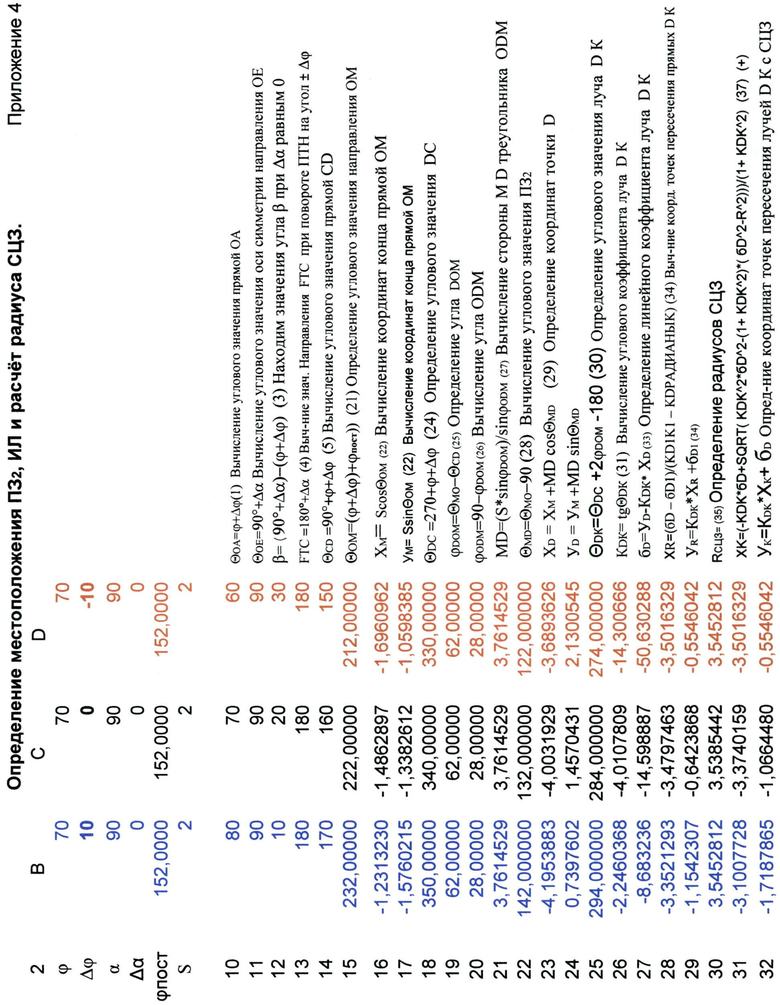
Чтобы определить радиус ОК сектора сферического цилиндрического зеркала нужно вычислить координаты точек «D» и «К». Для этого нужно определить местоположение плоского зеркала ПЗ2.
Чтобы определить местоположение ПЗ2 проведем из точки «О» (центр вращения устройства) (Фиг.13) прямую ОМ под постоянным углом ∠АОМ φпост=152° между лучом ИТЛС и прямой ОМ.
Угловое значение направления ΘOM вычисляются по следующей формуле:

Прямая CD, исходящая из платы грубой наводки устройства, пересекается с плоскостью зеркала ПЗ2, точке D. Плоское зеркало ПЗ2 находится на ПТН устройства (Фиг.12).
Прямая ОМ перпендикулярна к плоскости зеркала ПЗ2 и имеет постоянную длину (S), равную 2 см (Фиг.13).
Далее находим координаты конца перпендикуляра ОМ к плоскости ПЗ2 по следующей формуле:

Угловое значение луча CD вычисляется по следующей формуле:

Угловое значение луча DC вычисляется по следующей формуле:

Из треугольника AODM находим углы ∠DOM и ∠ODM (Фиг.13). При этом угловое направление ΘDC равно выражению: ΘDC=ΘCD-180.


Из треугольника ΔODM по теореме синусов [3] находим сторону MD по следующей формуле:

Угловое значение плоскости ПЗ2 вычисляется по следующей формуле:

Луч, исходящий из точки «С», отразившись от ПЗ2 в точке «D», идет к СЦЗ в точку «К» (Фиг.13). Пересечение лучей DK происходит не в одной точке «К» как это показано на Фиг.унках 2Б, 4 и 10 при ранее принятых допущениях, а пересечение прямых DK образует треугольник с вершинами в точках I, II и III. (Фиг.14).
Точка I - результат пересечения лучей DK и D1K1 среднего (исходного) положения и при повороте вправо луча на угол -Δφ.
Точка II - результат пересечения лучей DK и D1K1 среднего (исходного) положения и при повороте влево луча на угол +Δφ.
Точка III - результат пересечения лучей D1K1 и D2K2 при повороте луча вправо и влево на угол Δφ.
В точках I и II пересекаются луч среднего положения и крайние лучи, образованные при отклонении ИТЛС вправо и влево.
Точки I и II находятся на одинаковом расстоянии от центра «О» вращения прибора и СЦЗ.
Координаты точки D (Фиг.12) вычисляются по следующим формулам:

Угловое значение луча DK вычисляется по следующей формуле:

Угловой коэффициент прямой DK будет равен:

Уравнение прямой DK равно следующему уравнению:

Из уравнения (32) находим линейный коэффициент бD прямой DK.

Центр СЦЗ совмещен с центром вращения прибора «О» и, соответственно, в центре вращения платы точной наводки устройства. Для дальнейшей работы это расстояние берем в качестве радиуса «R» СЦЗ (Фиг.12). Для определения радиуса «R» СЦЗ составляем следующую систему уравнений:
Решая данную систему уравнений, находим формулы вычисления точек пересечения лучей DK, D1K1 и D2K2, полученных при различных положениях ИТЛС (при нулевом положении, при развороте вправо на 10° и при развороте влево на 10°).

Затем по формуле (35) определим радиус «R» отражающей поверхности сектора СЦЗ.

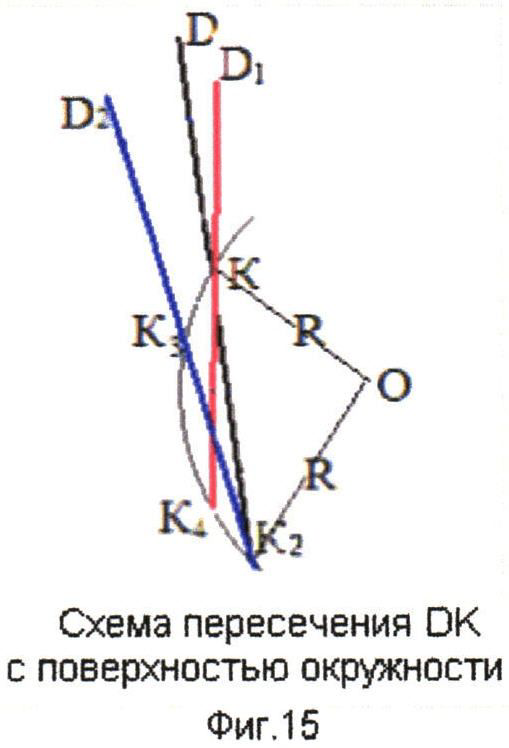
Радиусом R проведем окружность и на ее поверхности определим точки пересечения лучей DK с окружностью. Ход лучей и их точки пересечение с окружностью показан на Фиг. 15.
Луч, исходящий из точки «D», пересекается с окружностью в точке «К» с внешней стороны, и в точке «К2» с внутренней стороны окружности.
При повороте по ходу часовой стрелки на угол -Δφ, луч, исходящий из точки «D1», пересекается с окружностью в точке «К» с внешней стороны, и в точке «К4» с внутренней стороны окружности.
При повороте против хода часовой стрелки на угол +Δφ, луч, исходящий из точки «D2», пересекается с окружностью в точке «К3» с внешней стороны, и в точке «K2» с внутренней стороны окружности.
Для определения радиуса внешней поверхности СЦЗ найдем точку пересечения лучей, полученных при различных положениях ИТЛС.
Из всех точек пересечения лучей с окружностью нас интересует только точки «К» и «К3» в которых пересекаются лучи DK, с внешней стороны окружности, а также в районе этих точек проявляется эффект смены знака направления хода оптических лучей (Фиг. 15).
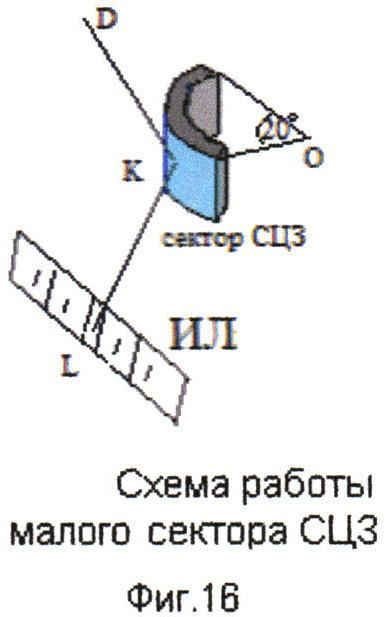
На внешнюю сторону малого сектора СЦЗ наносят отражающую зеркальную поверхность в районе точек «К» и «К3».
Размер этого сектора равен 20°. Этот размер обеспечивает беспрерывное отражение лучей при повороте ПТН на 10° влево или вправо (Фиг. 16).
Отраженный луч DK от ПЗ2 попадает на внешнюю зеркальную поверхности малого сектора сферического цилиндрического зеркала (СЦЗ) в районе точек «К» и «К3». СЦЗ закреплено на плате точной наводки устройства.
При первоначальной настройке устройства, когда включен ИТЛС (в среднем (исходном) положении). Измерительная линейка (ИЛ) устанавливается и закрепляется таким образом, чтобы отраженный луч KL был в биссекторе измерительной линейки (Фиг. 16). Этим самым закрепляется положение ИТЛС, ПЗ2, СЦЗ и ИЛ на плате точной наводки устройства.
Точка пересечения К (Фиг. 15) всегда остается на своем месте, а зеркальная поверхность сектора проворачивается под этой точкой «К», и, соответственно, меняется угол падения в этой точке при повороте ИТЛС по часовой стрелке -Δφ, поэтому луч выйдет из биссектора ИЛ в обратную сторону на угол +Δφ, так как в этой точке «К» действует свойство смены знака направления хода оптического луча.
Точка К3 пересечения луча D2K2 с СЦЗ не совпадает с точкой «К» (пересечения лучей DK и D1K1), но находится в зоне действия свойства «обратного» хода луча в ней тоже меняется угол падения при повороте ИТЛС против хода часовой стрелки +Δφ, поэтому луч выйдет из биссектора ИЛ в обратную сторону на угол -Δφ. Размер зоны смены знака направления хода оптических луча в данной работе не определялся, достаточно того, что такая зона есть и она работает.
Это будет свидетельствовать о том, что плата точной наводки устройства отклонилась от своего первоначального положения на угол ±Δφ. И чтобы восстановить первоначальное положение нужно повернуть на угол ±Δφ в обратную сторону ПТН вместе с ИТЛС, ПЗ2 и СЦЗ и ввести лучи в биссектор ИЛ.
Угол малого сектора СЦЗ с зеркальной поверхностью равен 20°. Такой размер выбран из расчета того, чтобы при вращении ПТН на углы ±10° точки пересечения лучей в точках «К» и «К3» всегда находились на зеркальной поверхности сектора.
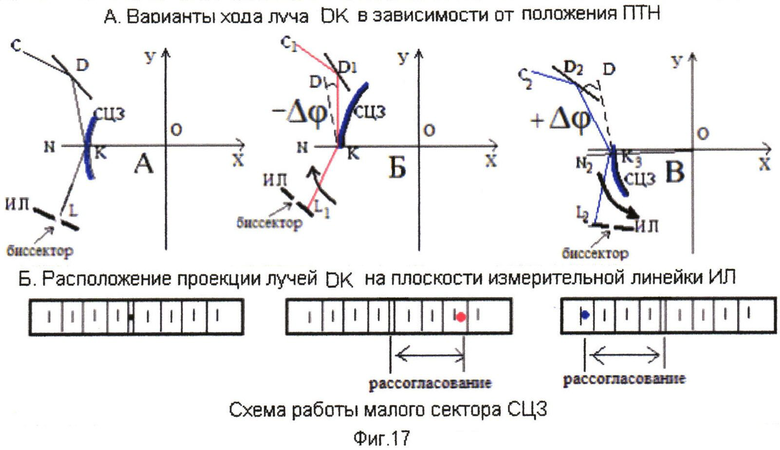
Варианты хода лучей показаны на Фиг.17. Среднее (исходное) положение ИТЛС, ПЗ2 и СЦЗ показано на Фиг.17А. Отраженный от плоскости ПЗ2 в точке D луч попадает на малый сектор в точки «К» и «К3». В этих точках происходит отражение лучей от зеркальной поверхности сектора. Отраженный от сектора луч попадает в биссектор ИЛ. Расположение проекции луча DK в биссекторе на плоскости ИЛ показан на Фиг.17А в разделе Б.
При любом повороте ИТЛС влево или вправо на угол ±Δφ лучи выйдут из биссектора ИЛ.
При отклонении платы точной наводки устройства (ПТН) со всеми своими деталями по ходу часовой стрелки на некоторый угол -Δφ точка пересечения луча D1K будет находиться в точке «К» малого сектора, в то же время под точкой К будет проворачиваться зеркальная поверхность малого сектора на угол -Δφ. Луч D1K при этом тоже поворачивается на угол -Δφ, но так как луч идет в точку «К», то угол падения OKD1 будет увеличиваться и луч отражения тоже будет увеличиваться и отклоняться против хода часовой стрелки на угол +Δφ от первоначального положения и не попадет в биссектор ИЛ (Фиг.17Б и раздел Б). Таким образом, ИЛ вместе с ПТН поворачивается по ходу часовой стрелки, а отраженный луч OKL1 поворачивается против хода часовой стрелки, поэтому появляется рассогласование.
При повороте ПТН, со всеми своими деталями, против хода часовой стрелки на некоторый угол +Δφ точка пересечения нижнего луча D2K2 будет находиться в точке «К3» малого сектора. В то же время под точкой «К3», будет проворачиваться зеркальная поверхность сектора на угол +Δφ. Луч D2K2 при этом тоже поворачивается на угол +Δφ, но так как луч идет в точку «К3», то угол падения N2K3D2 будет увеличиваться и луч отражения тоже будет увеличиваться и отклонятся по часовой стрелки на угол -Δφ от первоначального положения и не попадет в биссектор ИЛ (Фиг.17 В и раздел В). Таким образом, ИЛ вместе с ПТН поворачивается против хода часовой стрелки, а отраженный луч N2K3L2 поворачивается по ходу часовой стрелки, поэтому появляется рассогласование.
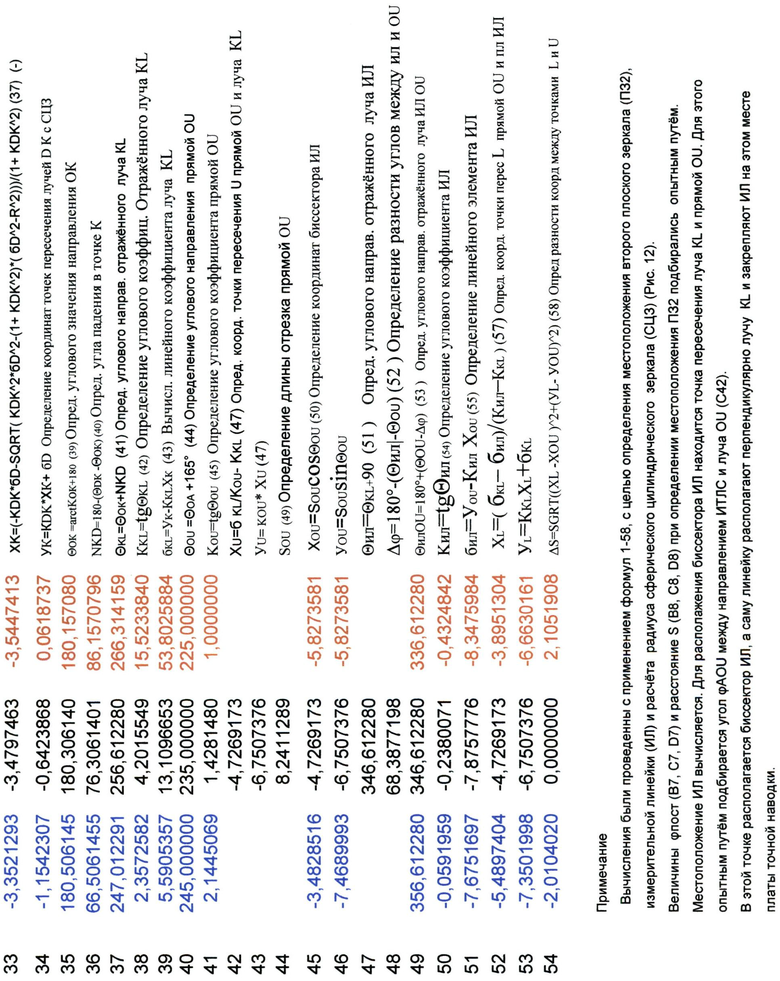
Для определения координат точки «К» пересечения луча DK и СЦЗ составим следующую систему уравнений:

После решения данной системы уравнений получаем формулы вычисления координат точек «К» и «К3» пересечения прямой DK и СЦЗ.

YK=KDKXK+бD.
Далее найдем угловой коэффициент КОК для луча ОК. Координаты точки «К» равны Хк и Ук, координаты центра сферического цилиндрического зеркала «О» равны нулю.

Найдем угловой элемент радиуса СЦЗ (прямой ОК) по следующей формуле:

Угол падения ∠NKD луча DK на внешнюю зеркальную поверхность малого сектора СЦЗ вычисляется по следующей формуле:

Угловое направление отраженного луча KL вычисляется по следующей формуле:

Угловой коэффициент отраженного луча KL вычисляется по следующей формуле:

Соответственно линейный коэффициент луча KL вычисляется по следующей формуле:

ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ИЗМЕРИТЕЛЬНОЙ ЛИНЕЙКИ
Для определения местоположения измерительной линейки (ИЛ) проведем из центра вращения устройства «О» прямую «OU» (Фиг.12) под постоянным углом φAOU, подобранный опытным путем, между ИТЛС и прямой «OU», равным 165°. Угловое направление прямой «OU» вычисляется по следующей формуле:

Угловой коэффициент КOU прямой «OU», вычисляется по следующей формуле:

Для определения координат точки «U», пересечения прямой «OU» и луча "KL" составим следующую систему уравнений:

После решения данной системы уравнений получаем формулы вычисления координат точки «U» пересечения прямой «OU» и луча "KL".

Точка пересечения "U" прямой «OU» и луча "KL" является одновременно центром биссектора измерительной линейки при Δφ=0.
Измерительная линейка (ИЛ) расположена перпендикулярно к лучу "KL", в точке U пересечения прямой «OU» с лучом "KL". Ее угловой коэффициент Кил будет равен следующему выражению:

Затем по формуле (49) определим длину прямой «OU» для определения координат центра биссектора ИЛ при повороте ПТН на угол ±Δφ.

Координаты биссектора ИЛ вычисляется по следующим формулам:

При этом угловое направление «Θил» измерительной линейки будет равно следующему выражению:

Для определения углового направления ИЛ нужно определить разность углов между направлениями ИЛ и прямой «OU» по следующей формуле:

Определение углового направления отраженного луча от поверхности СЦЗ проводится по следующей формуле:

Угловой коэффициент ИЛ определяется по следующей формуле:

Линейный коэффициент ИЛ определяется по следующей формуле:

Вычисления по формулам 47, 49, 51, 52 проводятся в исходном положении ИТЛС для подготовки определения местоположения ИЛ при φ=70° и Δφ=0°.
Для определения координат точки «L» пересечения луча «KL» и плоскости ИЛ составим следующую систему уравнений:

После решения данной системы уравнений получаем формулы вычисления координат точки «L» пересечения луча "KL" и плоскости ИЛ.

Полученные координаты точки «L» являются координатами пересечения луча "KL" и плоскости ИЛ, в то же время ранее получены координаты биссектора ИЛ, которые отличаются друг от друга при Δφ не равным нулю. Эта разность ΔS в координатах вычисляется по следующей формуле:

Таким образом, мы избавились от неопределенности в отношении смещения элементов прибора от своего первоначального положения. Если луч света на поверхности ИЛ не в биссекторе, то это означает только одно, что плата точной наводки прибора изменила свое первоначальное положение.
Для восстановления первоначального положения хода лучей, нужно ПТН повернуть в обратном направлении, ликвидировать разность ΔS и «вогнать» луч KL в биссектор ИЛ.
Глава V
ПРИМЕНЕНИЕ УСТРОЙСТВА
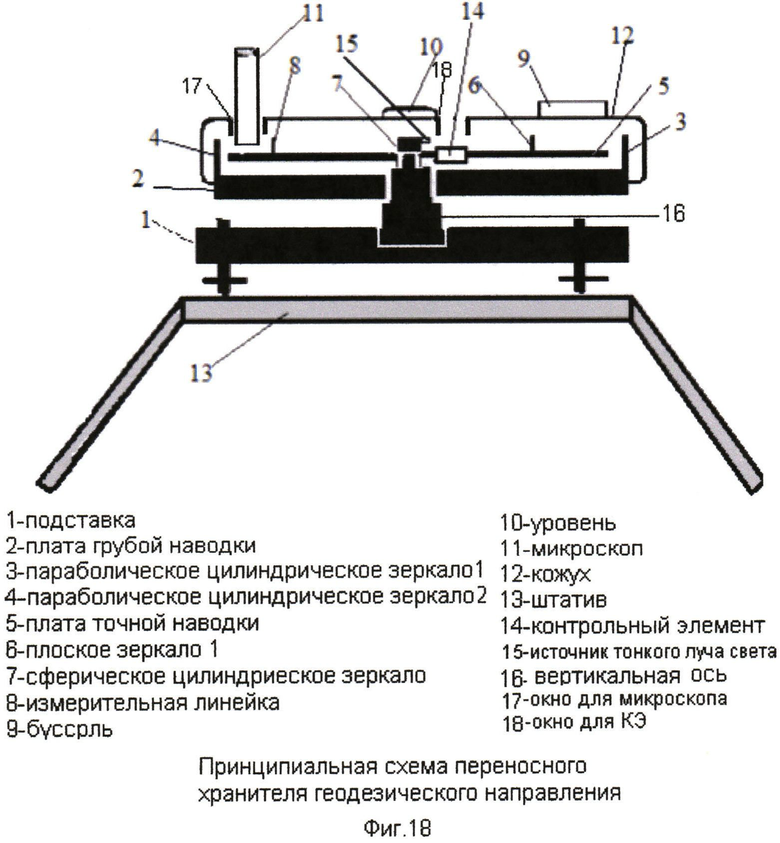
При небольшой доработке устройство можно использовать в качестве переносного прибора для хранения геодезического направления (Фиг. 18).
Защитой оптических деталей ПГН и ПТН является кожух с окнами для микроскопа и КЭ. Кожух связан с ПГН. Для грубой ориентировки ПГН добавлена на кожухе буссоль. Для горизонтирования устройства на кожухе установлен уровень. Микроскоп предназначен для отслеживания за положением луча и биссектора ИЛ. Микроскоп скреплен с платой точной наводки.
КЭ предназначен для хранения геодезического направления.
Прибор извлекают из транспортировочного ящика и устанавливают на штативе, горизонтируют с помощью уровня и по буссоли ориентируют на север с точностью не грубее ±10°. Далее, наблюдая в микроскоп, путем поворота ПТН, ввести луч в биссектор ИЛ. Этим действием восстанавливают первоначальное положение хода лучей и геодезического направления КЭ, введенного при изготовлении устройства.
Затем на геодезической точке, к югу от прибора, устанавливают теодолит. Теодолит центрируют, горизонтируют и зрительную трубу теодолита наводят на контрольный элемент прибора, зрительная труба теодолита должна быть автоколлимационной. Автоколлимационная труба [4] отличается от обычной тем, что ее сетка нитей искусственно освещается со стороны окуляра так, что это не мешает прямому визированию [1]. При визировании автоколлимационной трубой на призму будет видно как прямое, так и отраженное от призмы изображенное сетки нитей. Таким образом, с помощью автоколлимационной трубы можно определить направление перпендикуляра к поверхности призмы контрольного элемента прибора. Если перпендикуляр визирного луча трубы теодолита к плоскости контрольного элемента прибора восстановлен, а луч от включенного ИТЛС находится в биссекторе ИЛ, то это значит, что на теодолит передано паспортное ГН прибора, значение которого можно установить на лимбе горизонтального круга. После того как ГН передано на теодолит, сам прибор можно снять. Для этого выключают ИТЛС, закрепляют все стопорные винты. Прибор снимают со штатива и укладывают в транспортировочный ящик.
При некоторых ситуациях может возникнуть вариант дополнительного (ложного) нахождения луча в биссекторе ИЛ. Это может произойти, при выставке прибора на новой точки наблюдения, в случае физической фиксации всех стопорных винтов ПГН, ПТН и вертикальной оси прибора на предыдущей точке наблюдения. В этом случае при включении ИТЛС луч будет находиться в биссекторе. Для исключения возможной ошибки в рабочей области ±10° прибора нужно, по окончании наблюдений на точке, ПГН повернуть влево, ПТН - вправо на угол 2°-3° и в этом положении зафиксировать все стопорные винты прибора.
Прибор может быть использован как стационарный хранитель геодезического направления, как для периодического контроля, так и при непрерывном контроле в качестве элемента автоматической стационарной системы немедленного оповещения о произошедших изменениях заданного направления.
Техническим результатом использования заявленного технического решения является повышение эффективности решения задачи сохранения геодезического направления за счет создания удобного и надежного в эксплуатации устройства, упрощения конструкции, снижения габаритно-массовых характеристик, простоты операций и отсутствия вычислений.
Технический результат достигается тем, что предлагаемое устройство снабжено двумя платами, с размещенными на них оптическими системами, независимо вращающимися в горизонтальной плоскости вокруг общей вертикальной оси, закрепленной на основании, буссолью, уровнем, контрольным элементом и имеет следующие преимущества перед аналогами и прототипом:
- простота применения;
- отсутствие необходимости проведения расчетов;
- отсутствие необходимости стационарного закрепления на местности каких-либо элементов;
- возможность постоянного применения в стационарном варианте без ограничения по времени;
- меньшие сложность и стоимость изготовления;
- повышение надежности конструкции;
- снижение габаритно-весовых характеристик.
ВЫВОД: Таким образом, мы избавились от неопределенности в отношении смещения элементов хранителя от своего первоначального положения. Если луч света на поверхности ИЛ не в биссекторе, то это означает только одно, что плата точной наводки прибора изменила свое первоначальное положение.
Глава VI
ОПИСАНИЕ ФИГУР
На фиг. 1 представлена схема расположения элементов стационарного хранителя геодезического направления. Одним из недостатков является то, что невозможно определить, какой элемент хранителя сменил свое первоначальное положение при выходе вехи из биссектора коллиматора.
На фиг. 2 представлены схемы расположения падающих и отраженных лучей при смене знака направления хода оптического луча света. Смену знака обеспечивает сферический сектор, в котором происходит смена знака в точке «Е» пересечения лучей при колебании источника света. Если точка пересечения лучей «Е» находится не на отражающей поверхности сферы, то знак направления оптического луча света не изменится (А). Если точка пересечения лучей «Е» находится на отражающей поверхности сферы, то знак направления оптического луча света изменится на противоположный (Б).
На фиг. 3 демонстрируется схема расположения деталей со свойствами параболического отражателя на плоскости I, где OABCD - ход оптического луча, ЕА и E1С - правые ветви парабол 1 и 2 соответственно, tt - плоское зеркало, О - точка начала системы координат, совмещенная с центром вращения плоскости I.
На фиг. 4 присутствует схема расположения деталей с эффектом рассогласования положения оптического луча света при изменении азимутального направления ИТЛС. Аббревиатура CODKL обозначает ход луча при среднем положении ИТЛС. Луч C1O1D1K1L1 - при смещении ИТЛС влево на угол -Δφ=-10°. Отраженный луч KL идет вправо на угол Δφ=+10°. Рассогласования положения оптического луча света обеспечивает сферический сектор, в котором происходит изменение знака направления оптического луча света в точке пересечения лучей «К» при азимутальном колебании ИТЛС.
На фиг. 5 показаны оптические детали плоскости ПГН.
На фиг. 6 указана схема хода лучей при повороте ПГН влево, где ПГН - плата грубой наводки, ПЦЗ1 и ПЦЗ2 - параболические цилиндрические зеркала 1 и 2 соответственно, ПЗ1 - плоское зеркало, сплошным черным цветом показано среднее положение элементов ПГН, красным цветом показано положение при повороте влево. При этом луч CD будет проходить одним и тем же путем, как для среднего положения источника, так и при повороте.
На фиг. 7 показаны оптические и механические детали устройства.
На фиг. 8 показана схема вертикальной оси устройства с деталями плат точной и грубой наводок. Вертикальная ось устройства состоит из системы осей и втулок разных диаметров, которые обеспечивают возможность независимого азимутального вращения ПГН и ПТН.
На фиг. 9 представлена схема прохождения луча на платах точной и грубой наводок устройства, где OABCODKL - ход луча на платах.
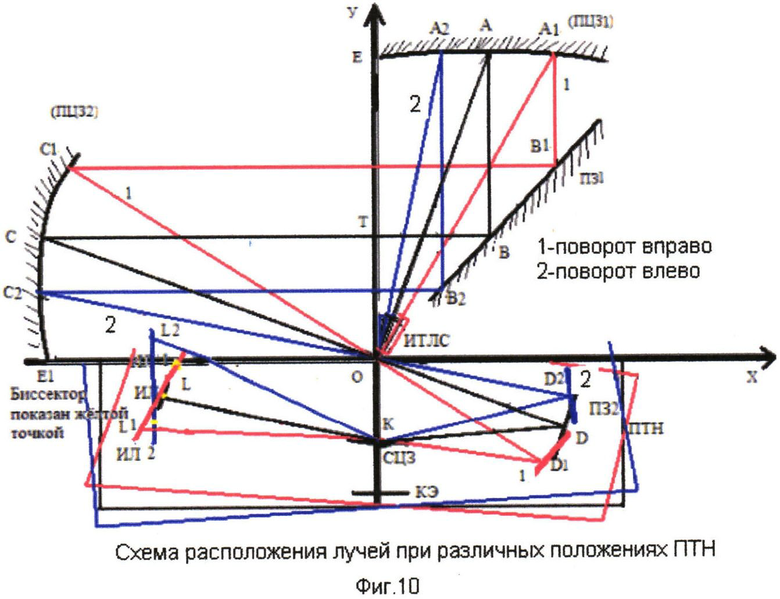
На фиг. 10 показана схема хода лучей при поворотах ПТН влево и вправо.
Фиг. 11 демонстрирует положение луча на измерительной линейки, при повороте ПТН влево луч на ИЛ пойдет вправо (положение В). При повороте ПТН вправо луч на ИЛ пойдет влево (положение Б).
Фиг. 12 демонстрирует схему установки ПЗ2 в месте для поворота лучей и измерительной линейки в третью четверть, туда где нет препятствий для хода лучей.
На фиг. 13 присутствует схема, поясняющая определение s - длины отрезка ОМ.
На фиг. 14 указана схема, показывающая пересечение лучей DK, которые пересекаются не в одной точке К.
На фиг. 15 показаны точки пересечение лучей DK на поверхности СЦЗ.
На фиг. 16 представлена схема работы сектора СЦЗ, обеспечивающая беспрерывное отражение лучей при повороте ПТН на углы ±10°.
Фиг. 17 демонстрирует варианты ходов лучей при среднем положении (17А), а также при повороте влево (17В) и вправо (17Б).
Фиг. 18 демонстрирует вариант принципиальной схемы устройства для сохранение ГН, где 1 - подставка (трегер), обеспечивающей размещение устройства на штативе и его горизонтирование. В подставке есть гнездо для вертикальной оси устройства - 16, позволяющее осуществлять ее независимое вращение. ПГН и ПТН вращаются вокруг вертикальной оси при ориентировании и восстановлении первоначального направления относительно истинного меридиана. 2 - ПГН, соединенная с кожухом устройства. Кожух имеет окна для наблюдения микроскопом за ИЛ и второе окно для КЭ. 5 - ПТН, 4 и 3 - параболические цилиндрические зеркала, размещенные на ПГН. 8 - измерительная линейка, 6 - плоское зеркало 1, 11 - микроскоп, соединенный с ПТН. 8 - плоские зеркало 2. 7 - сферическое цилиндрического зеркало, 15 - источник тонкого луча света, 14 - контрольный элемент (выполнен в виде призмы), закрепленный на ПТН, 10 - уровень для горизонтирования устройства, 9 - буссоль для ориентирования устройства не грубее ±10°.
ПЕРЕЧЕНЬ СОКРАЩЕНИЙ:
ЛИТЕРАТУРА
1. Г.Е. Лазарев, Е.М. Самошкин. Основы высшей геодезии. Москва, Недра, 1980.
2. С.В. Бахвалов, Л.И. Бабушкин, В.П. Иваницкий. Аналитическая геометрия. Москва. Просвещение 1970.
3. М.Я. Выгодский. Справочник по элементарной математике. ГИФМЛ Москва. 1959.
4. М.Я. Кругер, В.А. Панов, В.В. Кулагин, Г.В. Погарев, Я.М. Кругер, А.М. Левинзон. Справочник конструктора оптико-механических приборов. Ленинград. Машиностроение 1968.
5. Джон Уокенбах. Excel 2003. Библия пользователя. Москва - Санкт-Петербург - Киев. Диалектика 2009.
6. Б.С.Кузьмин, Б.А. Литвинов. Руководство по геодезии. Москва, издание ВИА, 1961.
7. Н.П. Заказнов, С.Н. Кирюшин, В.Н. Кузичев. Теория оптических систем. 3-е издание переработанное и дополненное. Москва. «Машиностроение». 1992 г.
8. И.Ф. Федоров. Геометрическая оптика. Саратов, «Сателит» 2008 г.
9. Dyott R.B., Alien D.E. A fiber optic gyroscope north finder tenth Jut J Conf. On Optical Fiber Sensors, Vol.2360, SRIE, Glasgow, 11-13 Oct. 1994 - p.442-448.
10. A.c. SU 13293227, МПК G01C 19/64, Способ определения угловых перемещений объекта лазерным гироскопом // Ефимов Б.В., Поляковский Е.Ф. - 1996. - БИ №16.
11. Патент Японии JP 7294258, МПК G01C 19/00. Устройство для определения направления на север.
12. Руководство по эксплуатации СКГР 02.07.000РЭ, ЗАО "Исток".
13. Патент RU 2115889, МПК G01C 19/38, 19/64, Способ определения направления истинного меридиана и волоконно-оптический гирокомпас, реализующий способ // Матисов И.А., Николаев И.А., Стригалев В.Е. - 1998.
ОГЛАВЛЕНИЕ
2. Глава 2 Описание способа сохранения
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ И ЦЕЛЕВОЙ ЗНАК ДЛЯ ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ ИЗДЕЛИЙ | 2000 |
|
RU2202101C2 |
| АНТЕННА | 1990 |
|
RU2006998C1 |
| КОМПАКТНАЯ МНОГОЛУЧЕВАЯ ЗЕРКАЛЬНАЯ АНТЕННА | 2008 |
|
RU2380802C1 |
| УСТРОЙСТВО КОНТРОЛЯ ВЗАИМНОГО ПОЛОЖЕНИЯ СБЛИЖАЮЩИХСЯ КОСМИЧЕСКИХ АППАРАТОВ | 2018 |
|
RU2694458C1 |
| ДВУХЗЕРКАЛЬНАЯ ОСЕСИММЕТРИЧНАЯ АНТЕННА | 1992 |
|
RU2039401C1 |
| Двухлучевой интерферометр (варианты) | 2017 |
|
RU2667335C1 |
| УНИВЕРСАЛЬНЫЙ СВЕТОДИОДНЫЙ ФОНАРЬ | 2000 |
|
RU2194212C2 |
| МНОГОЛУЧЕВАЯ НЕАПЛАНАТИЧЕСКАЯ ГИБРИДНАЯ ЗЕРКАЛЬНАЯ АНТЕННА | 2001 |
|
RU2181519C1 |
| Устройство формирования волоконной решетки Брэгга с возможностью перестройки длины волны отражения | 2024 |
|
RU2828253C1 |
| Устройство для измерения профиля объекта | 1990 |
|
SU1753260A1 |

Изобретение относится к способу и устройству для сохранения геодезического направления относительно истинного меридиана. Решение основано на том, что две оптические системы, содержащие отражающие поверхности, размещены на независимых плоскостях, имеющих общую вертикальную ось вращения, и связанных оптическим лучом в единое целое. При этом на одной из плоскостей установлен ретроотражатель, который обеспечивает возможность получения и контроля сохранённого геодезического направления. Реализация способа и настройка устройства при сохранении или восстановлении направления обеспечивается путём вращения двух плоскостей относительно друг друга для обеспечения прохождения луча от лазера, установленного в одной из оптических систем, по заранее определённому оптическому пути. Решение позволяет воспроизводить сохраняемое геодезическое направление как в условиях стационарного размещения, так и размещение на местности при минимальных усилиях. 2 н. и 3 з.п. ф-лы., 18 ил., приложение.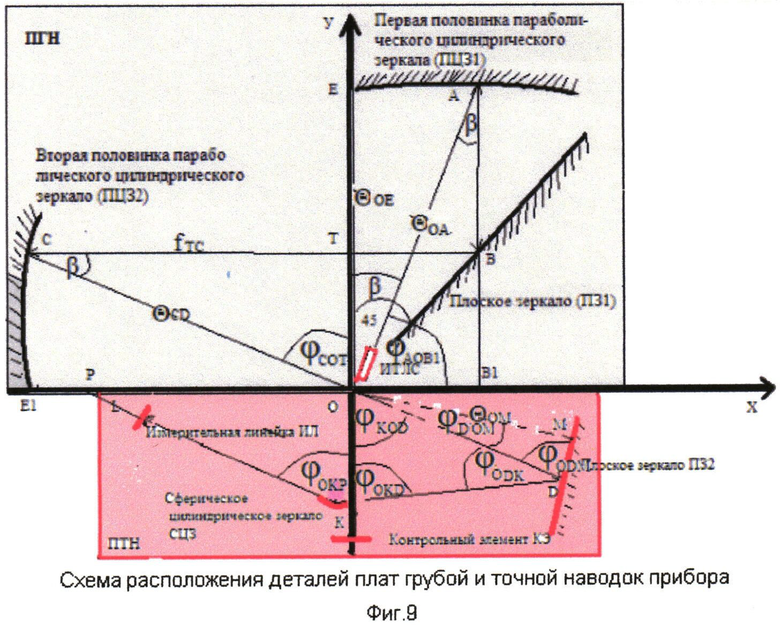
1. Способ сохранения геодезического направления относительно истинного меридиана для выбранной точки, заключающийся в том, что устройство сохранения геодезического направления (УСГН) по буссоли ориентируют на север с точностью не грубее ±10°, вводят луч света в биссектор ИЛ, восстанавливают первоначальное положение хода лучей и геодезического направления КЭ прибора относительно истинного меридиана,
отличающийся тем, что
УСГН выполнен в виде двух независимых оптических систем на одной неподвижной вертикальной оси, соединенной с основанием, имеющих общую точку вращения в горизонтальной плоскости,
первая из которых, использующая свойства параболического отражателя, обеспечивает посылку отраженного луча, являющегося связующим звеном для двух оптических систем, при ее грубом ориентировании относительно направления истинного меридиана и неподвижном источнике тонкого луча света (ИТЛС) из состава второй оптической системы,
вторая система, использующая свойства изменения знака хода отраженного луча, обеспечивает выявление рассогласования положения проекции луча при изменении азимутального направления ИТЛС и точное восстановление путем возврата проекции луча в биссектор измерительной линейки, входящей в состав оптического блока считывания отсчетов, геодезического направления (ГН) перпендикуляра к поверхности контрольного элемента (КЭ) из состава второй оптической системы относительно истинного меридиана, введенного при изготовлении УСГН, которое (ГН) определяют при наблюдении на КЭ в ходе совмещения прямого и обратного изображения сетки нитей автоколлимационной трубы угломерного прибора, установленного на выбранной точке в пределах прямой видимости УСГН, по окончанию работ осуществляют принудительное рассогласование азимутального положения оптических систем УСГН с целью исключения ошибки при дальнейшем использовании.
2. Устройство сохранения геодезического направления (УСГН), содержащее узлы горизонтирования и ориентирования, размещенные на корпусе, основание, жестко соединенное с вертикальной осью, геометрическая ось которой совмещена с точкой вращения устройства, на которой размещен корпус с возможностью независимого ориентирования в азимутальном направлении относительно основания, внутри которого помещена оптическая система приблизительной ориентации относительно направления истинного меридиана, и оптический блок считывания отсчетов,
отличающееся тем, что
в него введена плата точной наводки (ПТН), размещенная внутри корпуса УСГН, имеющего окна для обеспечения снятия отсчетов и наблюдения контрольного элемента, на неподвижной вертикальной оси с возможностью независимого поворота в азимутальном направлении, источник тонкого луча света (ИТЛС), первое и второе плоские зеркала, первое и второе параболические цилиндрические зеркала (ПЦЗ) с внутренней отражающей поверхностью, сектор цилиндрического зеркала с внешней отражающей поверхностью, контрольный элемент, доступный для наблюдения через окно в корпусе, жестко закрепленный на ПТН в азимутальной плоскости, но с возможностью вращения вокруг горизонтальной оси, параллельной плоскости ПТН, при этом первая оптическая система приблизительной ориентации выполнена в виде платы грубой наводки (ПГН), жестко соединенной с корпусом УСГН и расположенной на неподвижной вертикальной оси с возможностью независимого азимутального поворота, на которой размещены первое и второе параболические цилиндрические зеркала, оси симметрии которых расположены вдоль осей прямоугольной декартовой системы координат и пересечены в точке вращения устройства, в которой находятся фокусы обоих параболических цилиндрических зеркал, первое плоское зеркало, расположенное под углом 45° к оси симметрии первого параболического цилиндрического зеркала на прямой, проходящей через точку вращения устройства, неподвижно закрепленные перпендикулярно ее плоскости, на пути луча из ИТЛС, входящего в состав второй оптической системы, направленного под постоянным углом к оси абсцисс через точку вращения устройства, размещают первое параболическое цилиндрическое зеркало (ПЦЗ1), на пути отраженного от него, в соответствии со свойством параболы параллельно его оси симметрии, луча, располагают первое плоское зеркало и отклоняют луч под прямым углом в направлении второго параболического цилиндрического зеркала, на пути луча, отраженного от внутренней поверхности второго ПЦЗ2, продолжение которого (луча), в соответствии со свойством параболы, направлено в точку вращения устройства, устанавливают второе плоское зеркало из состава второй оптической системы, состоящей из второго плоского зеркала, сектора цилиндрического зеркала и выполненной в виде платы с жестко закрепленными перпендикулярно к ее поверхности отражающими поверхностями оптических элементов, и расположенной на неподвижной вертикальной оси с возможностью независимого вращения в азимутальном направлении, и ИТЛС, неподвижно закрепленного на ПТН, чем оптически объединяют ПГН и ПТН в единое целое, от которого луч отражается в направлении сектора цилиндрического зеркала, центр вращения которого расположен в точке вращения устройства, на пути отраженного от поверхности сектора луча монтируют оптический блок считывания отсчетов, выполненный в виде вновь введенных измерительной линейки (ИЛ) с нанесенной шкалой с биссектором, поверхность которой перпендикулярна плоскости ПТН и для которой угол между прямой, соединяющей точку вращения устройства с точкой пересечения плоскости ИЛ, и лучом, исходящим из ИТЛС, является постоянным, с возможностью корректировки ее (ИЛ) положения относительно ПТН по азимуту с целью проекции формируемого луча, при калибровке УСГН, в биссектор шкалы ИЛ, и направленного на ИЛ микроскопа, размещенного на ПТН, поле зрения которого позволяет наблюдать проекцию луча в пределах всей шкалы ИЛ при поворотах ПТН.
3. Способ по п. 1 отличается тем, что свойство изменения знака направления хода оптического луча света, обеспечивает сферический сектор, установленный на ПТН, в котором проявляется это свойство в точке «K» пересечения лучей при колебании источника света, если точка пересечения лучей «K» находится не на отражающей поверхности сферы (А), то знак направления оптического луча света не изменится, если точка пересечения лучей «K» находится на отражающей поверхности сферы (Б), то знак направления оптического луча света изменится на противоположный.
4. Способ по п. 1 отличается тем, что выявление рассогласования положения оптического луча света при изменении азимутального направления ИТЛС обеспечивает сферический сектор, в котором происходит изменение знака направления оптического луча света в точке пересечения лучей «K» при азимутальном колебании ИТЛС.
5. Способ по п. 1 отличается тем, что вертикальная ось устройства состоит из системы осей и втулок разных диаметров, которые обеспечивают возможность независимого азимутального вращения ПГН и ПТН.
| ХРАНИТЕЛЬ НАПРАВЛЕНИЯ | 1988 |
|
RU1573985C |
| Устройство хранителя азимутального направления | 1973 |
|
SU462082A1 |
| JPS 5811807 A 22.01.1983 | |||
| CN 102661743 A 12.09.2012 | |||

