Изобретение относится к области оптико-электронного приборостроения и предназначено для применения в системах управления движением (СУД) космического аппарата (КА) для обеспечения операций сближения и стыковки космических аппаратов.
Аналогами предлагаемого устройства являются мишени стыковки, используемые при проведении операций сближения и стыковки КА. Данные мишени описаны в литературе: «Энциклопедия машиностроение, Том IV-22, Ракетно-космическая техника, книга 2, часть II, глава 4.4. Система управления движением и навигации. Москва «Машиностроение» 2014».
Мишень стыковки представляют собой металлическую конструкцию имеющую основание с черным покрытием и нанесенным белым крестом, штангу, установленную перпендикулярно основанию по оси мишени и выносной крест на конце штанги. Выносной крест имеет белое покрытие. При наблюдении по оси мишени в случае отсутствия рассогласования осей сближающихся КА, выносной крест совпадает с крестом на основании мишени. Мишени стыковки используют в ручном контуре управления движением КА и в автоматическом режиме для контроля оператором процесса сближения и стыковки. Наблюдения мишени стыковки проводятся через специальный оптический визир, либо с помощью телевизионной камеры. Недостатком таких мишеней является то, что их видимость зависит от условий освещения. На дневной стороне орбиты возможен такой случай освещения Солнцем КА, при котором из-за сложной конфигурации КА мишень стыковки может оказаться в тени от элементов конструкции КА, и мишень будет плохо различима на телевизионном изображении из-за большого перепада яркостей. На ночной стороне орбиты при сближении двух КА на активном КА для освещения второго КА используют светодиодную фару. Из-за параллакса между осью визирования телевизионной камеры и осью излучения фары, на расстоянии от пяти и трех м основание мишени находится в конусе излучения фары, а выносной крест - вне конуса, в полутени. В результате из-за большого перепада яркости выносной крест пропадает на телевизионном изображении.
За прототип может быть принято устройство, представленное в патенте RU 2478185 С1 «Устройство определения пространственной ориентации объектов». Устройство содержит мишень с отражательными призмами, установленную на одном объекте (на пассивном космическом аппарате), а также два излучателя с марками, светоделитель, объектив, шторку и фотоприемное устройство, установленные на другом объекте. Излучатели и подсвечиваемые ими марки, лежат в плоскости, перпендикулярной фокальной плоскости объектива, причем марки лежат на линии пересечения этих плоскостей. Лучи от марок, пройдя через светоделитель и объектив, отразившись от мишени, попадают в объектив и, пройдя через светоделитель, попадают на фотоприемное устройство, связанное с вычислителем. Поворотная шторка перед объективом, перекрывающая поочередно лучи от одного или другого излучателя, предназначена для подфокусировки объектива для каждого из изображений двух масок. По местоположению изображения масок на фотоприемном устройстве, вычисляется относительное угловое положение двух объектов в одной плоскости.
Недостатком данного устройства, применительно к решению задачи контроля взаимного положения двух КА, является то, что оно позволяет контролировать угловые перемещения только в одной плоскости. Другими недостатками является наличие механизмов: поворотная шторка, механизм фокусировки объектива, что в условиях космического полета уменьшает коэффициент надежности.
Задачей настоящего изобретения является повышение эргономических характеристик и расширение функциональных возможностей устройства по контролю взаимной ориентации космических аппаратов при сближении.
Технический результат достигается тем, что в устройстве контроля взаимного положения сближающихся космических аппаратов, содержащем мишень, установленную на пассивном космическом аппарате, а также излучатели, в отличие от известного, излучатель в виде прямоугольного креста расположен в плоскости выходного окна мишени, за ним расположено сферическое зеркало, оптическая ось которого перпендикулярна плоскости выходного окна и проходит через центр перекрестья, между крестом и сферическим зеркалом расположен излучатель с маской, обращенной в сторону сферического зеркала и расположенной на расстоянии, соответствующим образованию увеличенного мнимого изображения маски, имеющего вид светящегося кольца с четырьмя биссекторами вокруг него, причем оптическая ось сферического зеркала пересекает центр светящегося кольца, а оси симметрии биссекторов совпадают с осями симметрии сторон креста, на внешней передней поверхности мишени расположен фотоприемник, электрически связанный с блоком управления излучателями.
Технический результат достигается за счет обеспечения возможности использования устройства в системе управления движением активного КА, при выполнении контроля взаимной ориентации при сближении с пассивным КА при любых светотехнических условиях, как на дневной, так и на ночной стороне орбиты.
Суть изобретения поясняется графическими материалами:
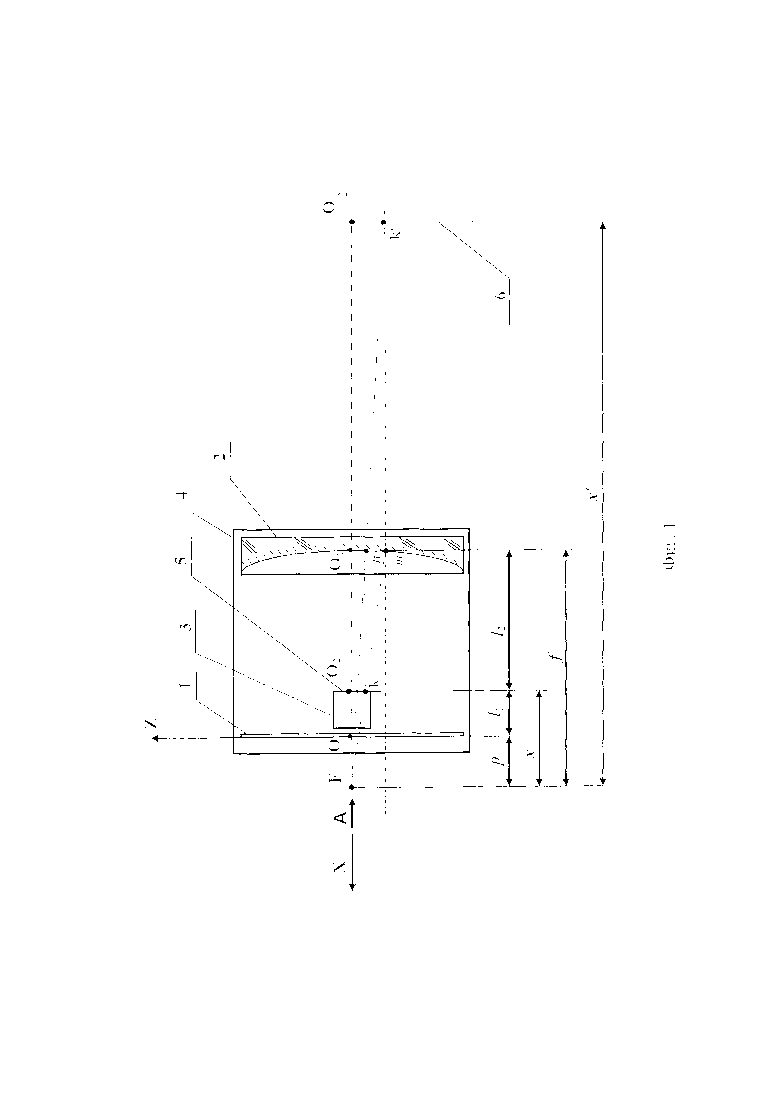
фиг. 1 - Сечение мишени в плоскости XOZ;
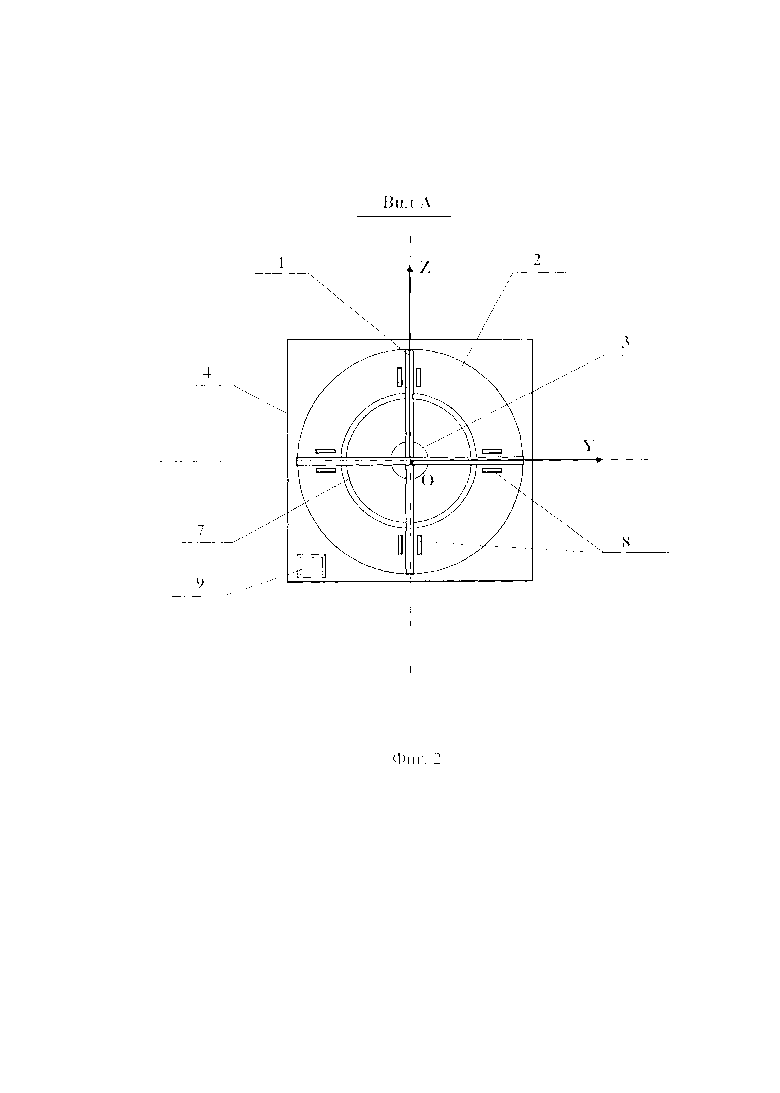
фиг. 2 - Вид А;
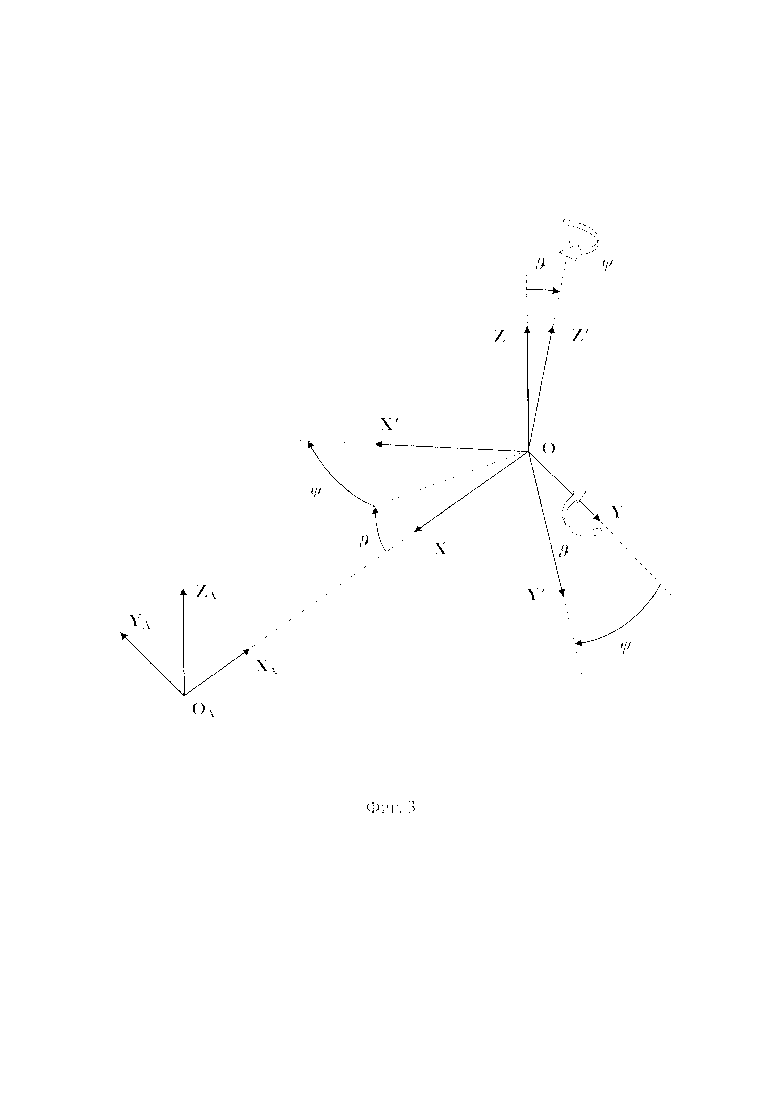
фиг. 3 - Взаимное положение систем координат двух КА;
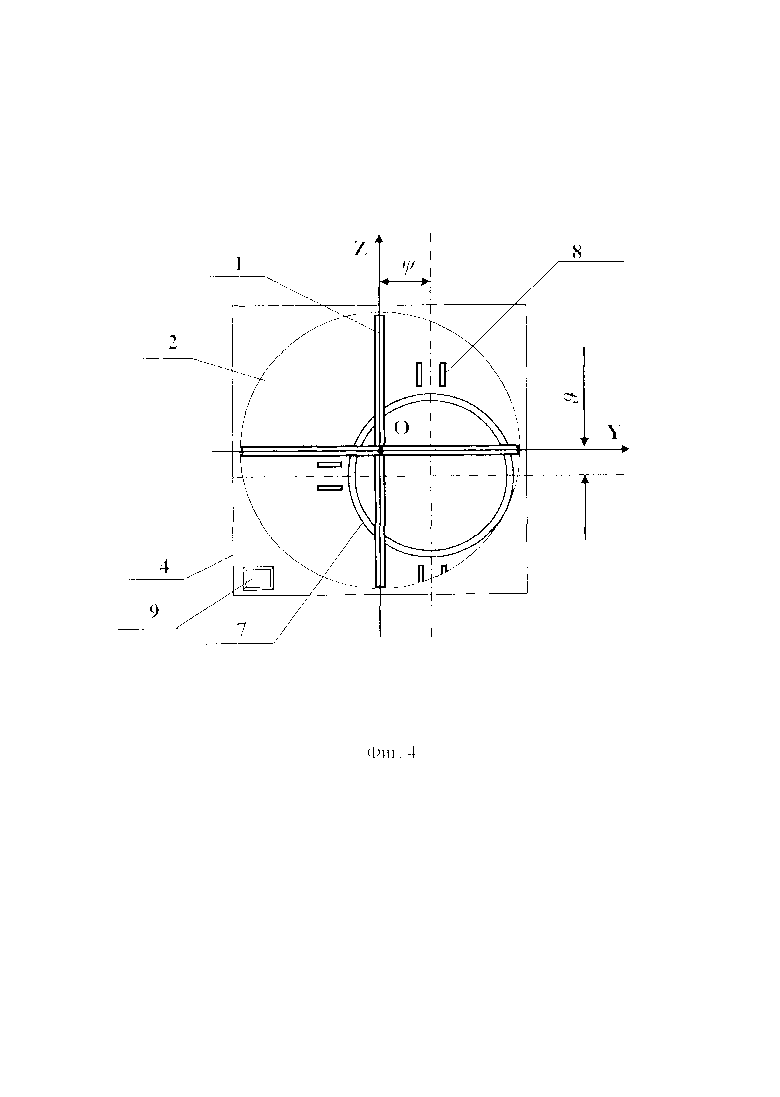
фиг. 4 - Вид мишени со стороны активного КА при разворотах мишени вокруг оси OY на угол ϑ и вокруг оси OZ на угол ψ;
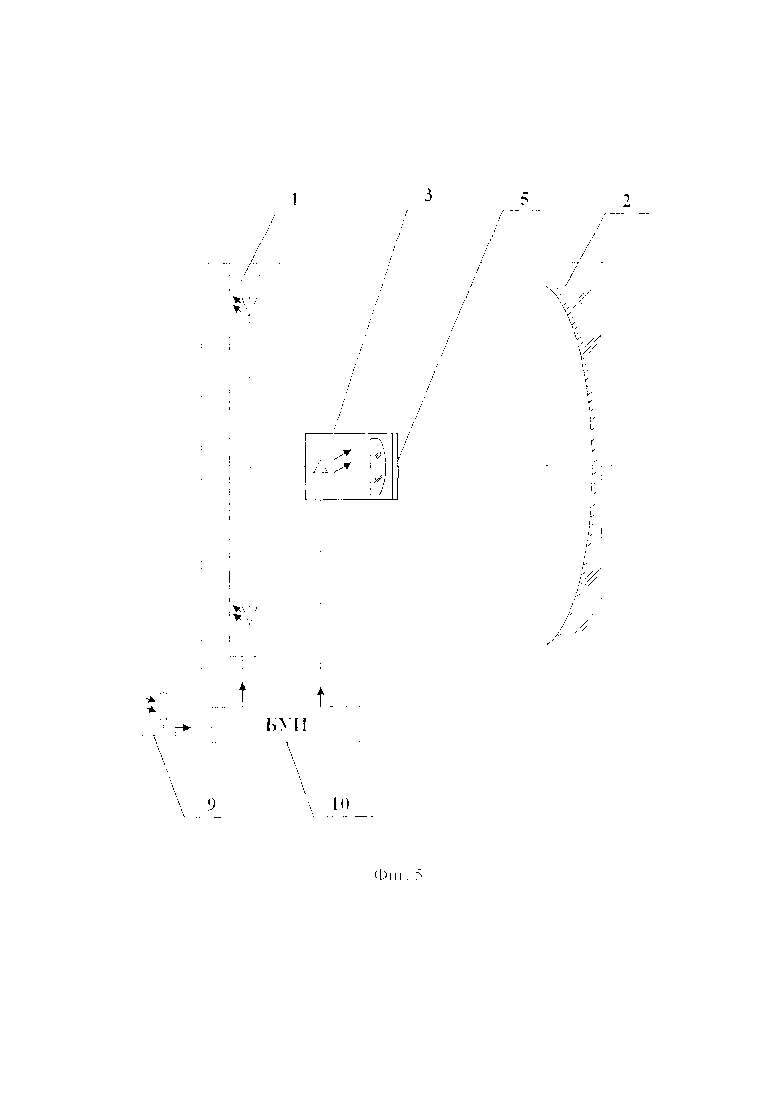
фиг. 5 - Функциональная схема устройства.
Перечень позиций:
1 - излучатель в виде прямоугольного креста,
2 - сферическое зеркало,
3 - излучатель с маской,
4 - корпус мишени,
5 - маска,
6 - плоскость локализации изображения светящейся маски, полученного с помощью сферического зеркала,
7 - увеличенное сферическим зеркалом изображение светящегося кольца маски,
8 - увеличенное сферическим зеркалом изображение светящихся биштрихов маски,
9 - фотоприемник,
10 - блок управления излучателями, к - точка в плоскости маски,
k' - изображение точки к маски в плоскости изображения,
F - точка фокуса сферического зеркала,
 - расстояние от плоскости прямоугольного креста до плоскости маски,
- расстояние от плоскости прямоугольного креста до плоскости маски,
 - расстояние от плоскости маски до точки O1 сферического зеркала,
- расстояние от плоскости маски до точки O1 сферического зеркала,
р - расстояние от плоскости прямоугольного креста до точки F,
ƒ - фокусное расстояние сферического зеркала,
х - расстояние от точки F до плоскости маски,
х' - расстояние от точки F до плоскости изображения маски.
Объемная мишень с излучателями устанавливается на корпусе пассивного КА снаружи вблизи порта для стыковки так, что ось ОХ мишени параллельна оси ОХ КА. В выходном окне 5 мишени расположен излучатель в виде прямоугольного креста 1. Оси симметрии сторон креста совпадают с осями OY и OZ мишени, а центр перекрестья совпадает с точкой О, являющейся началом системы координат мишени OXYZ. Внутри объемной мишени расположено сферическое зеркало 2, оптическая ось которого O1F совпадает с осью ОХ. На оси ОХ, между крестом 1 и сферическим зеркалом 2 расположен излучатель 3 с маской 5, совпадающей с плоскостью перпендикулярной оптической оси O1F сферического зеркала 2. Маска имеет вид кольца, центр которого лежит на оси O1F, а также четырех излучателей в виде биштрихов, расположенных с шагом 90°, снаружи кольца. Изображение маски 5 в сферическом зеркале 2 локализовано в плоскости 6, перпендикулярной оси ОХ. В соответствии с законами геометрической оптики, положение объекта и его изображения, получаемого с помощью оптической системы, в нашем случае сферического зеркала 2, можно определить по формуле:

где х - расстояние от точки фокуса F до точки О2, являющейся проекцией точки к маски 5 на оптическую ось O1F,
х' - расстояние от точки F до точки  - проекции точки k' на оптическую ось O1F,
- проекции точки k' на оптическую ось O1F,
ƒ - фокусное расстояние зеркала.
Линейное увеличение β изображения маски 5, расположенного в плоскости 6 по законам геометрической оптики определяется по формуле:

Для предохранения от перегрева прямоугольного креста и излучателя с маской при попадании прямого излучения Солнца в угловое поле сферического зеркала, должно быть такое расстояние р между точкой фокуса F сферического зеркала и положением прямоугольного креста, чтобы не было сфокусированного изображения Солнца на поверхности прямоугольного креста, обращенной к сферическому зеркалу.
На фиг. 2 показано взаимное положение прямоугольного креста 1 мишени, сферического зеркала 2, изображения светящегося кольца 7 и биштрихов 8 при совпадении положения оси визирования ОАХА с осью ОХ мишени.
При развороте мишени вокруг оси OY на угол ϑ и вокруг оси OZ на угол ψ, как показано на фиг. 3, взаимное положение прямоугольного креста 1 и изображения светящегося кольца 7 и биштрихов 8 при наблюдении вдоль оси визирования OАХА будет, как показано на фиг. 4.
Габаритный размер вдоль оси визирования механической мишени стыковки, состоящей из основания в форме пятиугольника черного цвета с белым крестом и белыми штрихами по краям основания, а также выносного креста белого цвета на штанге, закрепленной в центре перекрестья на основании, определяется длиной штанги  Габаритный размер предлагаемой в заявке мишени определяется расстоянием вдоль оптической оси между излучателем в виде прямоугольного креста и центром сферического зеркала
Габаритный размер предлагаемой в заявке мишени определяется расстоянием вдоль оптической оси между излучателем в виде прямоугольного креста и центром сферического зеркала  а именно:
а именно:

Для сравнения двух мишеней примем  при этом обе мишени будут иметь одинаковые смещения при наблюдении по оси визирования для одинаковых угловых разворотах мишеней.
при этом обе мишени будут иметь одинаковые смещения при наблюдении по оси визирования для одинаковых угловых разворотах мишеней.
Уменьшение габаритного размера вдоль оси визирования у предлагаемой мишени, по сравнению с механической мишенью стыковки, выразим через коэффициент KL, определяемы по формуле:

В качестве примера вычислим по формуле (4) коэффициент KL для следующих параметров мишени:

После подстановки указанных значений параметров в формулу (4) получим KL=3,5. Как видим, предлагаемая мишень позволяет в несколько раз сократить габариты мишени вдоль оси визирования.
Согласно поставленной задаче мишень должна обеспечивать проведение контроля взаимной ориентации активного и пассивного КА, как на дневной, так и на ночной стороне орбиты. Контроль взаимной ориентации проводит оператор с помощью телевизионной камеры. Оператор должен отчетливо видеть не только изображение мишени, но и окружающие элементы конструкции пассивного КА с которым производится сближение.
На ночной стороне орбиты при сближении пассивный КА с установленной на нем мишенью освещается фарой размещенной на активном КА. Освещенность пассивного КА обратно пропорциональна квадрату расстояния от фары до поверхности пассивного КА:

где
Еп_фара - освещенность пассивного КА от фары на активном КА,
I0 - осевая сила света,
L - расстояние от активного КА до пассивного КА.
При I0=30000 Кд, L=30 м, Еп_фара=33,33 Кд/м2,
При I0=30000 Кд, L=4 м, Еп_фара=1875 Кд/м2.
Считаем, что поверхность пассивного КА имеет равномерную индикатриссу рассеяния лучей, а коэффициентом отражения (альбедо) Ап=0,5. Тогда яркость поверхности пассивного КА Вп_фара_, рассчитываемая по формуле:

составит для L=30 м Вп_фара_30м≈5 Кд/(м2×Стер),
для L=4 м Вп_фара_4м≈298 Кд/(м2×Стер).
На дневной стороне орбиты освещенность поверхности пассивного КА, обращенной в направлении линии визирования активного КА, зависит от угла падения солнечных лучей к этой поверхности:

где
ϕ - угол падения солнечных лучей к поверхности КА,
Еп_Солнце_0 _ освещенность поверхности КА при нормальном падении солнечных лучей (ϕ=0),
Еп_Солнце_ϕ - освещенность поверхности КА при угле падения солнечных лучей ϕ>0 град.
На границе земной атмосферы, при среднем расстоянии Земли от Солнца, для видимого диапазона длин волн, Еп_солнце_0≈140000 Кд/м2, а яркость поверхности пассивного КА Вп_Солнце_0≈22280 Кд/(м2×стер).
Как показано выше, согласно выражениям (5) и (7), условия освещения пассивного КА изменяются на ночной стороне орбиты с изменением расстояния между КА, а на дневной стороне изменяются с изменением угла падения солнечных лучей на поверхность пассивного КА. Следовательно, яркость поверхности пассивного КА, в зависимости от условий освещения, может отличаться на несколько порядков:

Телевизионная камера на активном КА при работе автоматически подстраивается под усредненную яркость наблюдаемых объектов. Излучатели мишени также должны подстраиваться под условия освещенности пассивного КА, так, так чтобы яркость излучателей мишени, как минимум в 2 раза превышать усредненную яркость окружающего мишень фона (поверхности пассивного КА), но при этом не выходить из динамического диапазона телевизионной камеры, чтобы не происходило ее ослепления. Для обеспечения этого условия на внешней поверхности мишени расположен фотоприемник 9, электрически связанный с блоком управления излучателями. Связи излучателей мишени 1 и 3, блока управления излучателей 10 и фотоприемника 9 показаны на функциональной схеме фиг. 5.
Предлагаемое устройство может быть использовано в качестве мишени стыковки в системе управления движением, как пилотируемых КА, так и транспортных грузовых КА для обеспечения телеоператорного режима управления (ТОРУ).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОНТРОЛЯ ВЗАИМНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ | 2019 |
|
RU2730393C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СБЛИЖЕНИИ | 2017 |
|
RU2662620C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ ПАССИВНЫХ КОСМИЧЕСКИХ АППАРАТОВ | 2011 |
|
RU2486112C1 |
| СПОСОБ ПОЛУАВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 2015 |
|
RU2605231C1 |
| УСТРОЙСТВО ДЛЯ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ И ПАРАМЕТРОВ ОРИЕНТАЦИИ ПИЛОТИРУЕМОГО КОСМИЧЕСКОГО КОРАБЛЯ | 2016 |
|
RU2650730C1 |
| Устройство автоматической стыковки космических аппаратов в операциях орбитального обслуживания | 2017 |
|
RU2669763C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ НАБЛЮДАЕМОГО ОБЪЕКТА | 1993 |
|
RU2093432C1 |
| Способ регулирования скорости сближения сервисного и обслуживаемого космических аппаратов при их стыковке | 2019 |
|
RU2742132C1 |
| ДАТЧИК УГЛА ПОВОРОТА | 2017 |
|
RU2644994C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРИЧАЛИВАНИЕМ | 1996 |
|
RU2104233C1 |
Изобретение относится к области оптико-электронного приборостроения и предназначено для применения в системах управления движением космического аппарата. Заявленное устройство контроля взаимного положения сближающихся космических аппаратов содержит мишень, установленную на пассивном космическом аппарате и излучатели. В выходном окне мишени установлен излучатель в форме прямоугольного креста, центр перекрестья которого задает начало системы координат мишени OXYZ, оси симметрии сторон креста совпадают с осями OY и OZ, ось ОХ направлена от центра перекрестья в сторону излучения. За крестом внутри мишени расположено сферическое зеркало, оптическая ось которого совпадает с осью ОХ мишени. Между крестом и сферическим зеркалом расположен излучатель с маской, обращенной в сторону сферического зеркала, на расстоянии от зеркала, соответствующем образованию увеличенного мнимого изображения маски. Положение этого изображения, видимое со стороны активного КА, на фоне светящегося креста, позволяет оценивать угловые отклонения оси пассивного КА от оси активного КА. Фотоприемник, установленный на внешней поверхности мишени, электрически связан с блоком управления излучателями, что позволяет проводить контроль взаимной ориентации КА в широком диапазоне фоновой засветки мишени на дневной и ночной стороне орбиты. Технический результат - повышение эргономических характеристик и расширение функциональных возможностей устройства по контролю взаимного положения космических аппаратов при сближении. 5 ил.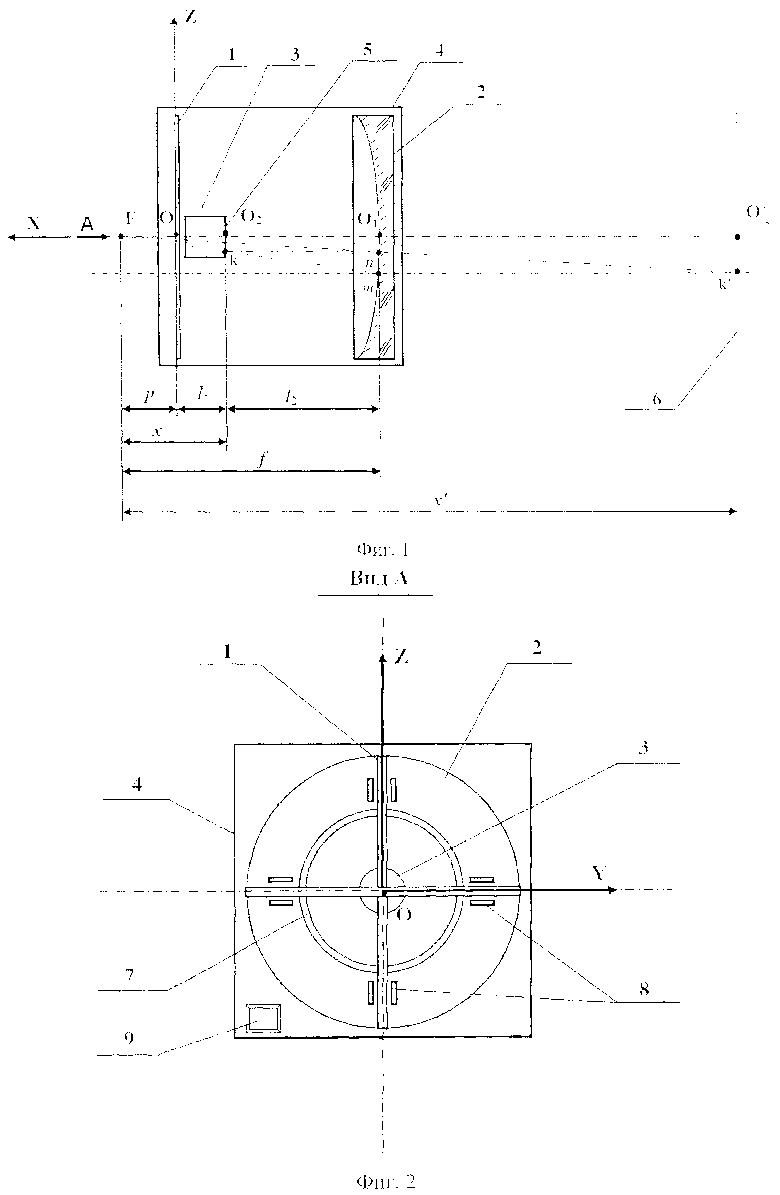
Устройство контроля взаимного положения сближающихся космических аппаратов, содержащее мишень, установленную на пассивном космическом аппарате, а также излучатели, отличающееся тем, что излучатель в виде прямоугольного креста расположен в плоскости выходного окна мишени, за ним расположено сферическое зеркало, оптическая ось которого перпендикулярна плоскости выходного окна и проходит через центр перекрестья, между крестом и сферическим зеркалом расположен излучатель с маской, обращенной в сторону сферического зеркала и расположенной на расстоянии, соответствующем образованию увеличенного мнимого изображения маски, имеющего вид светящегося кольца с четырьмя биссекторами вокруг него, причем оптическая ось сферического зеркала пересекает центр светящегося кольца, а оси симметрии биссекторов совпадают с осями симметрии сторон креста, на внешней передней поверхности мишени расположен фотоприемник, электрически связанный с блоком управления излучателями.
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ | 2011 |
|
RU2478185C1 |
| УСТРОЙСТВО КОНТРОЛЯ ОРИЕНТАЦИИ КОСМИЧЕСКИХ АППАРАТОВ ПРИ СБЛИЖЕНИИ | 2017 |
|
RU2662620C1 |
| US 5734736 A1, 31.03.1998 | |||
| US 5493392 A1, 20.02.1996 | |||
| US 5291195 A1, 01.03.1994. | |||

