Область техники, к которой относится изобретение
Настоящее описание направлено к такому типу технологии по наполнению контейнеров, который может быть использован, например, для вставки так называемых "сюрпризов" в пищевые продукты, например шоколадные яйца и т.п.
Однако ссылка на эту возможную область применения не должна считаться ограничивающей в отношении объема описания.
Описание предшествующего уровня техники
Оболочечные контейнеры, включающие первую и вторую чаноподобную полуоболочку, которые должны быть соединены друг с другом взаимосвязью с фронтальным соединением соответствующих участков входных отверстий, известны благодаря большому количеству вариантов осуществления, документально подтвержденных множеством патентной литературы, включающей, например, документы WO-A-2005/044677, WO-A-2005/110880 и WO-A-2007/074355. В частности, контейнеры этого типа известны в версиях, в которых первая и вторая полуоболочка представляют собой предметы, отдельные друг от друга, а также в версиях, в которых первая и вторая полуоболочки шарнирно соединены друг с другом, чтобы образовывать единый предмет.
Основная задача, касающаяся облегчения использования таких контейнеров, в особенности, касающаяся операций заполнения и закрывания, уже рассматривалась.
Документы EP-A-0631932, EP-A-0631933 и EP-A-0631934 демонстрируют усовершенствования в этом направлении.
При выполнении упомянутых ранее операций заполнения и закрывания должно быть принято во внимание, что в контейнер могут вставляться листовые элементы, например:
- лист, содержащий инструкции для сборки игрушки или развлекающего объекта, представляющего "сюрприз",
- "сюрприз" или его части, и
- различные декоративные элементы, возможно, с самоклеящейся поверхностью.
Существуют устройства, подобные описанному в EP-A-0751070, которое позволяет скрутить такой лист и вставить его в основную часть контейнера. Решения такого типа подходят для использования, когда лист представляет собой простую форму полоски.
Однако существуют применения, в которых лист должен нести значительное количество информации/графических изображений/, в таком случае простой полоски недостаточно, при этом требуется использование большего сложенного листа.
Хотя доступны автоматизированные решения, подобные тем, которые описаны в ранее упомянутых документах, до сих пор большинство общих решений при использовании вышеупомянутых оболочечных контейнеров предусматривают, что обе операции заполнения, включающие операции вставки листа с инструкциями и финальное закрывание, выполняются вручную.
Более точно, настоящее изобретение относится к устройству согласно ограничительной части пункта 1 формулы изобретения, которое известно, например, из EP 0611699 A.
Задача и сущность изобретения
Использование ручных операций в ранее изложенном контексте в настоящий момент следует признать неудовлетворительным.
Таким образом, возникает необходимость в замещении ручных операций операциями, допускающими полную автоматизацию, касающимися также вставки листов с инструкциями или плоских полосок, возможно, с самоклеящейся основой, полученных из полоски, нарезанной в линию из рулона.
Целью настоящего изобретения является предоставление ответа на перечисленные ранее запросы.
Согласно настоящему изобретению, эта задача решается благодаря устройству, имеющему отличительные особенности, о которых идет речь, в частности в п.1 формулы изобретения.
Изобретение также относится к соответствующему способу, который описан в пункте 13 формулы изобретения.
Формула изобретения образует неотъемлемую часть технического раскрытия, предоставленного в материалах настоящей заявки в отношении изобретения.
Краткое описание приложенных фигур
Далее будет описано изобретение исключительно в качестве неограничивающего примера, обращаясь к прилагаемым фигурам, представляющим структуру и последовательные этапы работы для вариантов осуществления.
В частности:
- на фиг. 1-3 проиллюстрирована операция по захвату листовых элементов,
- на фиг. 4-8 и на фиг. 9-11 проиллюстрированы различные операции по манипулированию такими листовыми элементами, и
- на фиг. 12-16 проиллюстрирована вставка таких элементов в соответствующие контейнеры.
Подробное описание
Продемонстрированное в последующем описании представляет собой различные специфические подробности, направленные на обеспечение глубокого понимания вариантов осуществления. Варианты осуществления могут быть получены без одной или нескольких специфических подробностей или посредством других способов, компонентов, материалов и т.д. В других случаях известные структуры, материалы или операции не показываются или не описываются подробно для того, чтобы избежать излишней информации в различных аспектах вариантов осуществления.
Ссылка на "вариант осуществления" в этом описании указывает, что конкретная конфигурация, структура или характеристика, описанная относительно варианта осуществления, включена по меньшей мере в один вариант осуществления. Следовательно, выражения, например, "в варианте осуществления", возможно, присутствующие в различных частях этого описания, необязательно относятся к одному варианту осуществления. Более того, конкретные конфигурации, структуры или характеристики могут быть объединены любым подходящим образом в одном или более вариантах осуществления.
Ссылки в материалах настоящей заявки используются лишь для того, чтобы содействовать читателю, и, таким образом, они не определяют объем защиты или диапазон вариантов осуществления.
Настоящее подробное описание обращается к вариантам осуществления устройства, которое должно быть использовано для вставки листовых элементов, например, "листов" F (как более подробно описано в дальнейшем) в оболочечные контейнеры C такого типа, который далее именуется "цилиндром".
В примерах, рассматриваемых в материалах настоящей заявки (см. в частности фиг. 12-14), в оболочечном контейнере С можно различить две чанобразных полуоболочки C1 и C2 и концевые участки крышек. В дальнейшем эти полуоболочки будут именоваться для краткости как "основная часть" (полуоболочка С1) и "крышка" (полуоболочка С2).
Такое отличие используется исключительно для простоты описания. В случае цилиндра С, проиллюстрированного в материалах настоящей заявки, основная часть С1 представляет покрывающую поверхность (термин «покрывающая поверхность» используется в материалах настоящей заявки для указания на боковую поверхность, примыкающую к контуру входного отверстия основной части C1), имеющую большую протяженность в отношении покрывающей поверхности крышки C2. В других вариантах осуществления затрагиваемые соотношения размеров могут быть, безусловно, пересмотрены разными способами (например, с двумя покрывающими поверхностями, идентичными друг другу). Также следует принимать во внимание тот факт, что контейнер С может иметь форму, отличную от формы, проиллюстрированной в материалах настоящей заявки, например, форму овала (или веретеновидную), сферическую форму, призматическую форму, цилиндрическую форму и т.д.
Кроме того, в примерах, представленных в материалах настоящей заявки, основная часть С1 и крышка С2 соединены друг с другом гибкой конструкцией С3, служащей в качестве шарнира. Шарнир С3 также пригоден для того, чтобы быть произведенным согласно различным способам, которые представлены в различных документах, уже упомянутых во вступлении настоящего описания.
Присутствие шарнирного узла С3 хотя и возможно, однако не представляет обязательный элемент в отношении реализации вариантов осуществления.
Примерные варианты осуществления, которые должны восприниматься в качестве примеров, ссылаются к решениям, в которых листовые элементы или листы F предназначены для вставки в соответствующие контейнеры С, параллельно в N (в рассматриваемом примере N=5, но в действительности N может принимать любое значение 1,...N) контейнеров С, размещенных в опорном блоке 1200, причем, в частности, основные части С1 N контейнеров вставляются в соответствующие N углублений для приема, предусмотренных в блоке 1200.
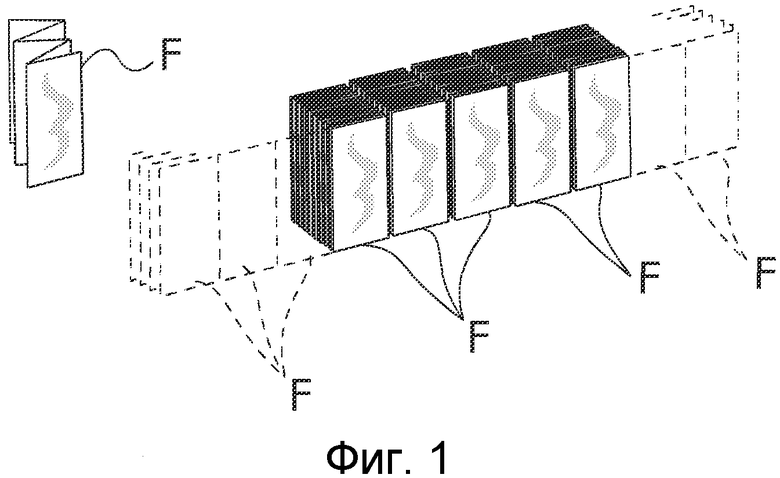
Рассматривая далее элементы F (а также обращаясь к тому, что было упомянуто ранее во вступлении настоящего описания), проиллюстрированные примеры ссылаются к листовым элементам, в целом, имеющим продолговатую форму, для которой могут быть различены больший или максимальный размер. В качестве примера, изображения, прикрепленные к материалам настоящей заявки, относятся к листам, полученным в результате первоначального складывания листа и последующего складывания или, как представлено отдельно слева на фиг. 1, в результате складывания зигзагом (т.е. складывания гармошкой или следует ниже) полоски, на которой может быть указана, например, информация или инструкции, касающиеся объекта (например, касающиеся "сюрприза", предназначенного для вставки в контейнер С, собранного или который должен быть собран).
В примерах, рассматриваемых в материалах настоящей заявки, листовые элементы или "листы" F имеют листовую структуру при условии, что они могут быть образованы одним или несколькими листами в плоском состоянии, представляя собой, например, форму (список ниже не должен рассматриваться исключающим):
- простых полосок или листов, например, форму квадратной или прямоугольной этикетки,
- элементов, выполненных из многослойных листов, например, переводной бумаги, наложенной на соответствующий лист-основу, выполненный из материала с небольшой клеящей способностью,
- согнутых зигзагом полосок, как представлено в левой части фиг. 1, чтобы получить многослойную листовую структуру,
- листов, согнутых посредством одной или нескольких последовательных операций по складыванию, чтобы получить плоскую основу с листовой структурой, включающей несколько слоев, выполненных из листов, наложенных друг на друга в результате складывания, или
- плоских полосок, образующих, например, компоненты "сюрприза" или его украшение, изготовленных из бумаги или пластика, например, получаемых из рулона, который нарезается в линии.
Различные варианты осуществления показывают способность нестандартным образом обрабатывать все эти различные типы элементов F, при этом гарантировать достижение желаемого финального результата, т.е. вставку в контейнер С в сложенном состоянии (см. фиг. 13).
На фиг. 1-3 показан тот случай, когда элементы F могут быть обеспечены (действуя согласно известным критериям, например, размещая их в распределительные секции, которые должны периодически пополняться оператором или автоматически) в форме массива последовательных рядов элементов F, выстроенных в линии, следующие одна за другой (например, в относительно лежачем состоянии между последующими элементами F в одном ряду для того, чтобы избежать нежелательного разворачивания).
В примерах, рассматриваемых в материалах настоящей заявки (см. фиг. 12-14), предполагается, что элементы F должны быть вставлены параллельно в N=5 контейнеров С, переносимых блоком 1200. Следовательно, предполагается, что операция по захвату затрагивает, начиная с конфигурации, проиллюстрированной на фиг. 1, 5 элементов за один раз. Однако эта опция предусмотрена в качестве примера в том отношении, что количество элементов F, подходящих для одновременной "обработки", может нетипичным образом меняться.
Касаясь этого, тот факт, что на фиг. 1-3 пунктирными линиями представлено другое возможное количество рядов элементов F, направлен на то, чтобы подчеркнуть возможность обеспечения нескольких конструкций для элементов F, отличных друг от друга. Такая дифференциация операции захвата касательно элементов F, захватываемых периодически, осуществляется для того, чтобы загрузить в группы контейнеров С, обрабатываемые последовательно, группы элементов F, отличные друг от друга, не модифицируя другие способы обработки элементов F.
В случае в целом вытянутых элементов F, т.е. для которых может быть обычно идентифицирован больший или максимальный размер, может быть предусмотрено расположение бок о бок (как проиллюстрировано на фиг. 1-3) для минимизации общего размера, т.е. размещение в ряды элементов F бок о бок в направлении, соответствующем их меньшему или минимальному размеру. В вариантах осуществления, проиллюстрированных на фиг. 1-3, предполагается, что элементы F являются в целом прямоугольными, и что они сориентированы в конфигурации захвата, позволяющей примыкающим рядам включать элементы F, расположенные "вертикально", чтобы уменьшить общий размер.
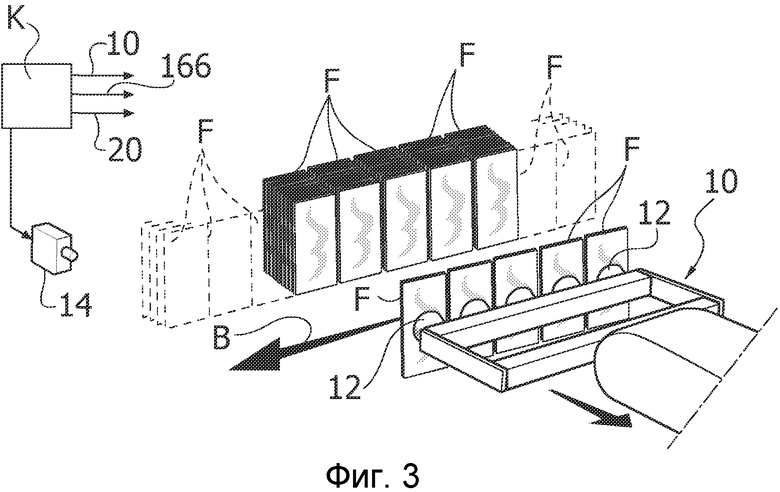
На фиг. 2 и 3 ссылка 10 используется для указания захватывающего устройства, например, "руки" антропоморфного робота, не полностью видимого на изображении, но известного типа, снабженного множеством вакуумных захватывающих узлов 12 (для краткости "присосов"), расположенных бок о бок, количество которых соответствует количеству N элементов F, предназначенных для захвата за один раз.
Такой тип вакуумных захватывающих устройств "руки", рассматриваемый в материалах настоящей заявки, известен в данной области техники, как подтверждено, например, документами EP-A-0239547, EP-A-0989080, EP-A-0968940, EP-A-0768254 или US-A-4932180. В частности, работа робота, переносящего руку 10 (включенного в управление рукой), может активизироваться блоком К обработки, например, персональным компьютером для промышленных целей, который также контролирует (согласно, по существу, известным критериям) работу других различных подвижных элементов и/или узлов манипуляции/обработки, описанных в дальнейшем.
На последовательности фиг. 2 и 3 показано, что робот, снабженный рукой 10, может быть приведен в действие (также согласно известным критериям, также проиллюстрированным в упомянутом документе) так, чтобы продвигать "руку" 10 вперед по направлению к массиву элементов F (фиг. 2), позволяя вакуумному захватывающему узлу 12 действовать на соответствующий элемент F "вакуумным" действием по захвату (т.е. "эффектом всасывающего устройства") таким образом, что, когда робот удаляет руку 10, каждый захватывающий узел 12 вследствие этого переносит элемент F в плоском состоянии для того, чтобы перемещать его к дальнейшим операциям по обработке, осуществляя основное движение перемещения, представленное стрелкой B на фиг. 3.
При осуществлении такого передвижения захватывающая рука 10 может приводиться таким образом, чтобы она проходила перед просмотровым блоком, например, перед камерой 14. Камера следит за массивом элементов F, транспортируемых захватывающей рукой 10, и обнаруживает возможные нарушения, например отсутствие одного или нескольких элементов F захваченного массива, т.е. неверное позиционирование одного или нескольких элементов F.
Работа по обнаружению возможных нарушений выполняется на основе выходных сигналов от узла 14 (обычно камеры) блоком К обработки.
При обнаружении наличия нарушения в ранее обнаруженном массиве элементов F на основе сигнала, обеспеченного камерой 14, блок K может отправить к роботу команду, например, чтобы позволить блоку 12 обнаружения руки 10 остановить функционирование, чтобы сбросить ранее захваченные элементы F с обнаруженным отклонением в расположенный ниже сборочный контейнер, предотвращая их перемещение вперед по направлению к дальнейшим обрабатывающим операциям. В этом случае робот способен вернуться в рабочее положение для продолжения обнаружения нового массива элементов F.
В различных вариантах осуществления существует предусмотренная опция деактивации исключительно вакуумных захватывающих узлов 12, где элемент F не был захвачен или был неверно расположен.
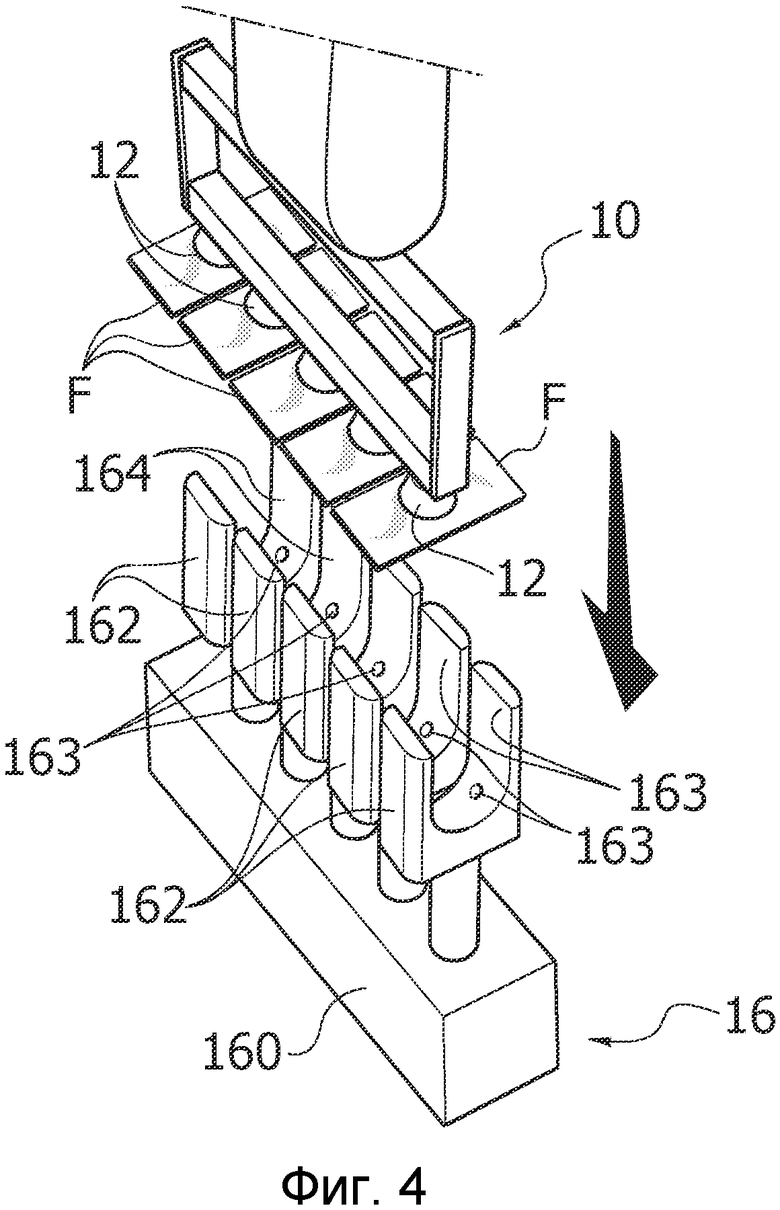
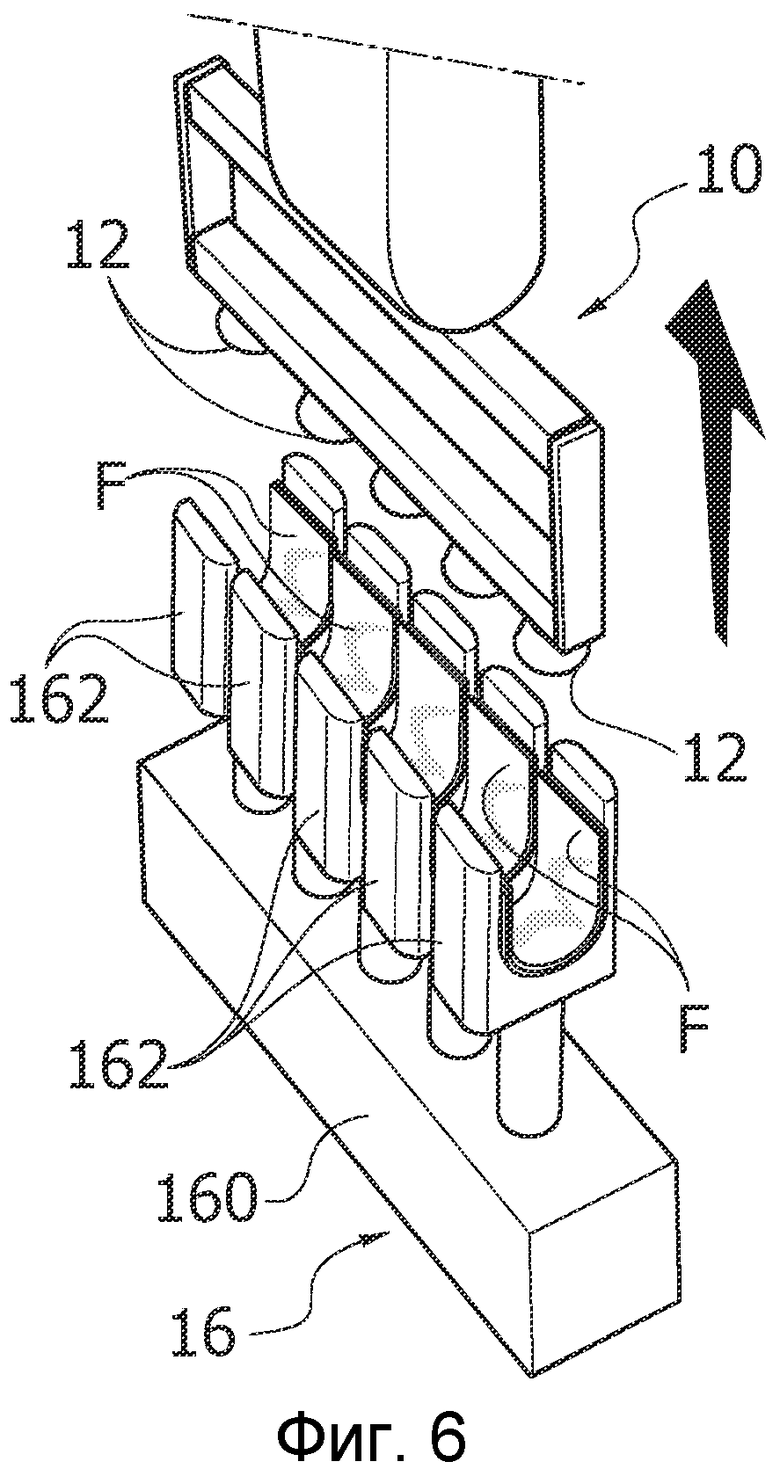
Когда робот удаляет руку 10, каждый захватывающий узел 12 несет свой элемент F в плоском состоянии, чтобы иметь возможность переместить его к дальнейшим обрабатывающим операциям, при этом осуществляет основное движение перемещения, представленное стрелкой B на фиг. 3. Например, если работа по захвату элементов F была по меньшей мере частично успешной, рука 10 с элементами F, удерживаемыми захватывающими узлами 12 в плоском состоянии, направляется вперед по направлению к приемному узлу 16 (фиг. 4), включающему в варианте осуществления, проиллюстрированном в материалах настоящей заявки, опорный блок 160, на котором смонтировано множество приемных конструкций 162, которые в варианте осуществления, проиллюстрированном на фигурах, в целом являются вилкообразными (U-образными) с вогнутой впадиной 164.
Конструкции 162 размещены в линейном массиве, включающем N элементов. В примере, проиллюстрированном в материалах настоящей заявки, N=5, при этом также принимается во внимание тот факт, что по меньшей мере в данных условиях использования (например, когда существует предусмотренное действие, деактивирующее лишь вакуумный захватывающий узел 12, в котором элемент F не был захвачен или он неверно расположен) не все приемные конструкции 162 могут быть намеренно использованы одновременно.
Когда рука 10 обращена к узлу 16 для вставки элемента F в него, вогнутые участки 164 приемной конструкции 162 выравниваются таким образом, чтобы совместно определять паз или канал.
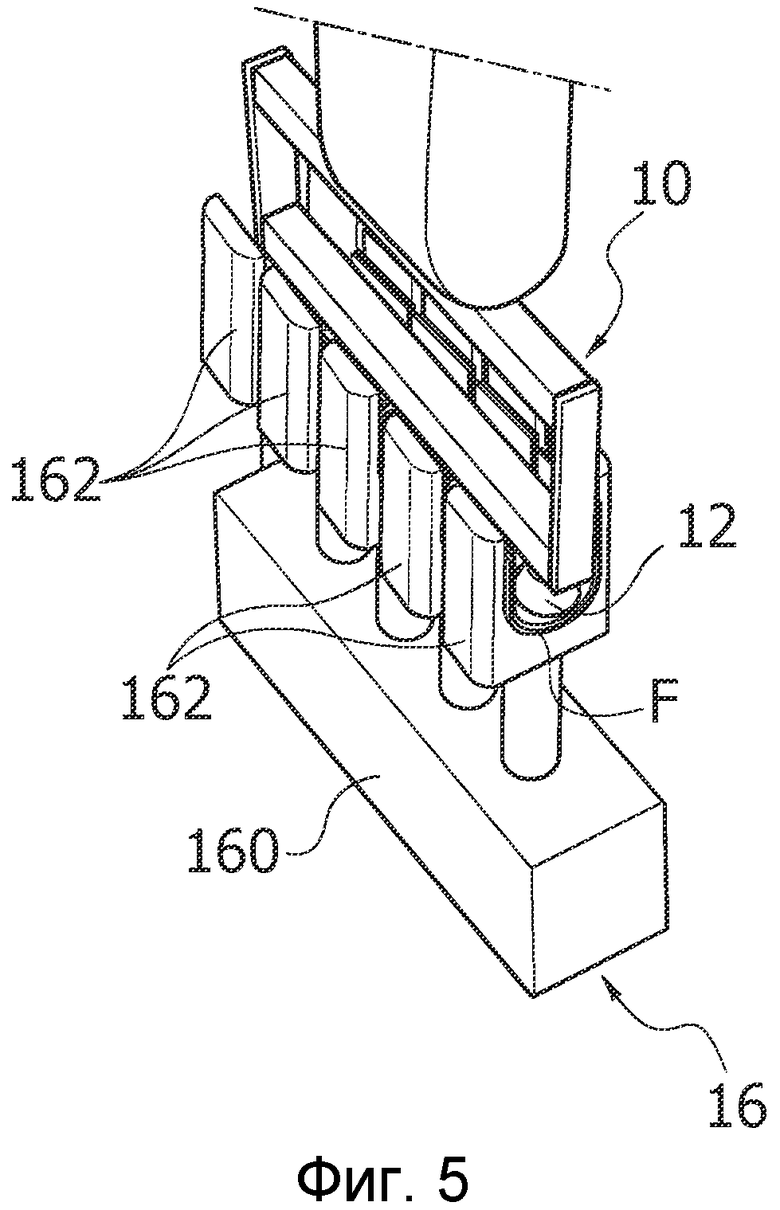
Как проиллюстрировано последовательностью фиг. 4 и 5, робот затем опускает руку 10 по направлению к узлу 16 таким образом, что элементы F, переносимые захватывающими узлами 12, вставляются в вогнутые участки 164 приемных конструкций 162 и принимают соответствующую U-образную форму, что в результате определяет (первую) операцию по складыванию элементов F.
После выполнения этого условия (фиг. 5) блок K может воздействовать на робот, который перемещал элементы F до этого момента времени, определив действия:
- деактивирование захватывающих узлов 12 руки 10, что прервет действие захвата элементов F, оставив их в принимающих конструкциях 162, и
- последующий подъем руки 10 (см. фиг. 6), которая, таким образом, может быть возвращена роботом в начальное состояние для захвата, указанное фиг. 2.
Однако должно быть замечено, что при использовании приемных конструкций 162, выбор вогнутой или вилкообразной конфигурации не является обязательным. Без ущерба тому, чтобы позволить элементам F, захваченным в плоском состоянии, принять U-образную форму в результате вставки в упомянутую впадину 164, приемная впадина 164 может, например, иметь форму цилиндрических впадин с открытым дном.
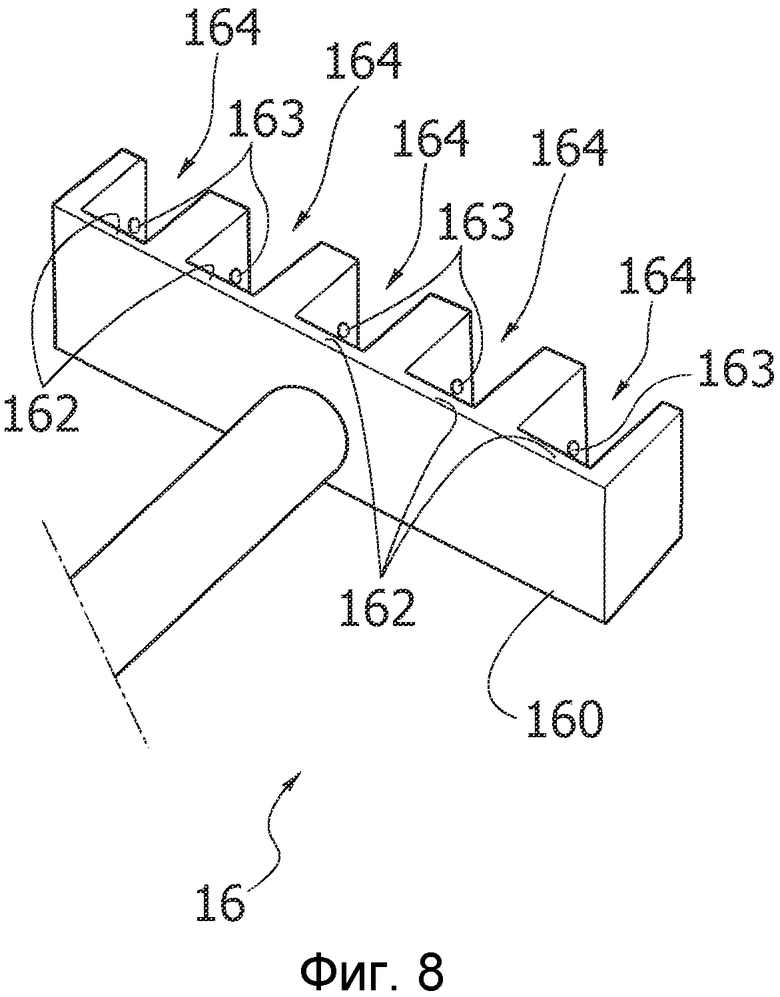
В варианте осуществления, проиллюстрированном на фигурах, во впадинах 164 также предусмотрено существование концевых отверстий 163, приспособленных для избирательного соединения в результате команды, порожденной блоком К, с источником пониженного давления (например, с одним из которых могут быть соединены захватывающие узлы 12), чтобы оказывать вакуумное действие по захвату на элементы F, вставленные во впадины 164.
В этом случае, на основании выполнения условия фиг. 5, блок K может воздействовать на робот, который перемещал элементы F до этого времени, определив согласованные действия:
- декативирование захватывающих узлов 12 руки 10, что прервет их действие по захвату элементов F, и
- активирование отверстий 163, которые удерживают элементы F в приемных конструкциях 162.
Также в этом случае блок К может вызвать подъем руки 10, которая может быть, таким образом, возвращена роботом в начальное состояние для захвата, указанное фиг. 2.
На фиг. 2 отдельно пунктирной линией показана возможность того, что рука 10 может переносить несколько массивов захватывающих узлов. Например, на фиг. 2 изображено то, что, помимо (первого) массива захватывающих узлов 12, рука 10 может переносить по меньшей мере один второй массив захватывающих узлов 120. Например, каждый захватывающий узел 120 (он опять же может быть вакуумным захватывающим узлом) может быть установлен на дальнем конце консоли 122, которая продолжается от основной части руки 10. В некоторой степени это представляет собой ситуацию, в которой два массива захватывающих узлов 12 и 120 (включая пример с одинаковым количеством узлов, в соответствии с которым каждому узлу 12 соответствует узел 120) размещены на концах двух ответвлений идеальной L-образной конфигурации.
На фиг. 2 изображено, что, таким образом, возможно предусмотреть, например один или несколько рулонов B, каждый из которых автоматически раскручивается и нарезается (в 124) для образования плоских полосок F', приспособленных для того, чтобы образовывать, например, часть "сюрприза" или, возможно, декоративную часть на самоклеящейся основе.
Такие плоские элементы F' могут быть захвачены захватывающими узлами 120 и вставлены в конструкции 162 согласно способам, описанным ранее, обращаясь к фиг. 1-6, касающимся плоских элементов F и захватывающих узлов 12.
В различных вариантах осуществления блок K может быть, например, запрограммирован (согласно, по существу, известным критериям) так, чтобы позволять согласно потребностям, которые меняются с течением времени, руке 10 захватывать и, в качестве альтернативы, вставлять в принимающие конструкции 162:
- элементы F, захваченные узлами 12, или
- элементы F', захваченные узлами 120.
В различных вариантах осуществления блок K может, например, быть запрограммирован (опять же, по существу, известным критериям) так, чтобы позволять:
- руке 10 захватывать, используя узлы 12, элементы F, вставляя их в приемные конструкции 162, посредством первого передвижения, и
- руке 10 захватывать, используя узлы 120, элементы F', вставляя их в элементы F, вставленные ранее в приемные конструкции 162, таким образом, накладывая элементы F и F', посредством второго передвижения.
В остальном рабочий способ (включая возможность сброса элементов, рассматриваемых в качестве неверно расположенных) может осуществляться согласно, по существу, идентичным критериям.
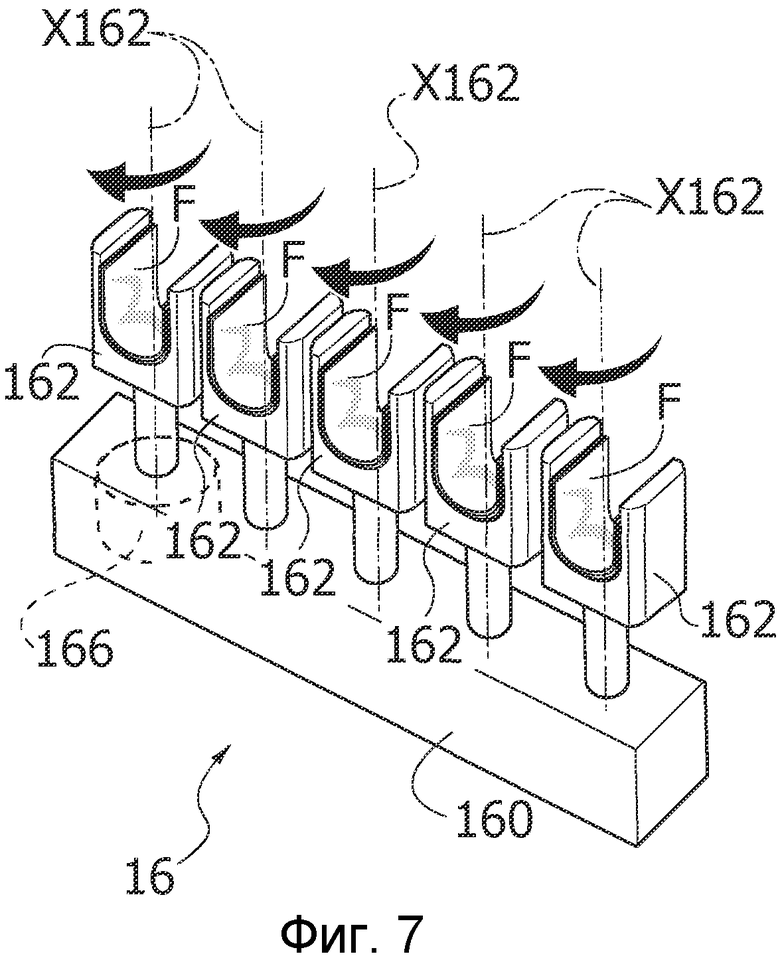
В варианте осуществления, относящемся к фиг. 7, приемные конструкции 162 устанавливаются на основную часть 160 с возможностью вращения на 90° в отношении их главной оси X162.
Такое вращение может быть активизировано блоком K, который воздействует на соответствующие приводы 166 (только один из которых схематично указан пунктирной линией на фиг. 7) так, чтобы позволить вогнутым участкам 164 сначала по отношению друг к другу определить в целом структуру канала, фиг. 4-6, а затем осуществить вращение на 90°, повернув конструкции 162 вокруг соответствующих главных осей Х162 и сориентировав в местоположение, в точности, ортогональное тому, в котором они находились ранее. Все это позволяет впадинам 164 и элементам F, которые находятся в них, образовывать ряд элементов, расположенных бок о бок в конфигурации, в целом, подобной (см. фиг. 7) средневековой стене с зубцами или бойницами, при этом элемент F фактически ограничивает впадину или пустое пространство между примыкающими зубцами.
На фиг. 8 изображен тот факт, что способность вращения группы приемных конструкций 162 на опорном блоке 160 приемного узла 16 не является обязательной характеристикой. Приемный узел 16 может фактически также быть произведен в форме гребенчатого узла (см. фиг. 8), имеющего стационарную "зубчатую" или гребенчатую конфигурацию, подобную той, которая проиллюстрирована на фиг. 7 и приобретена после вращения конструкций 162.
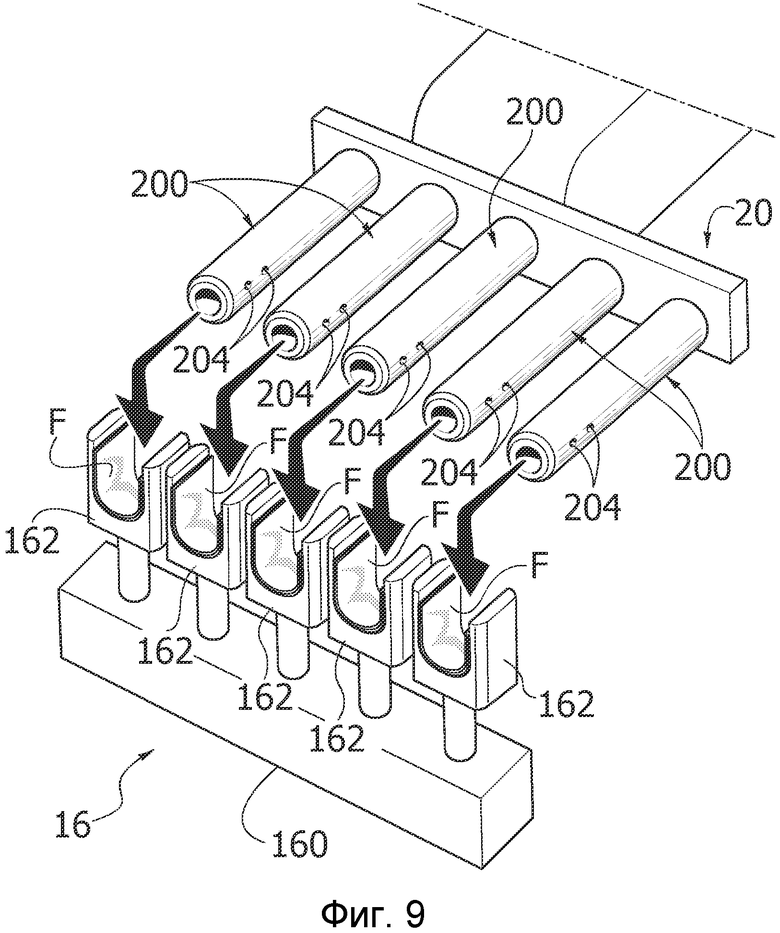
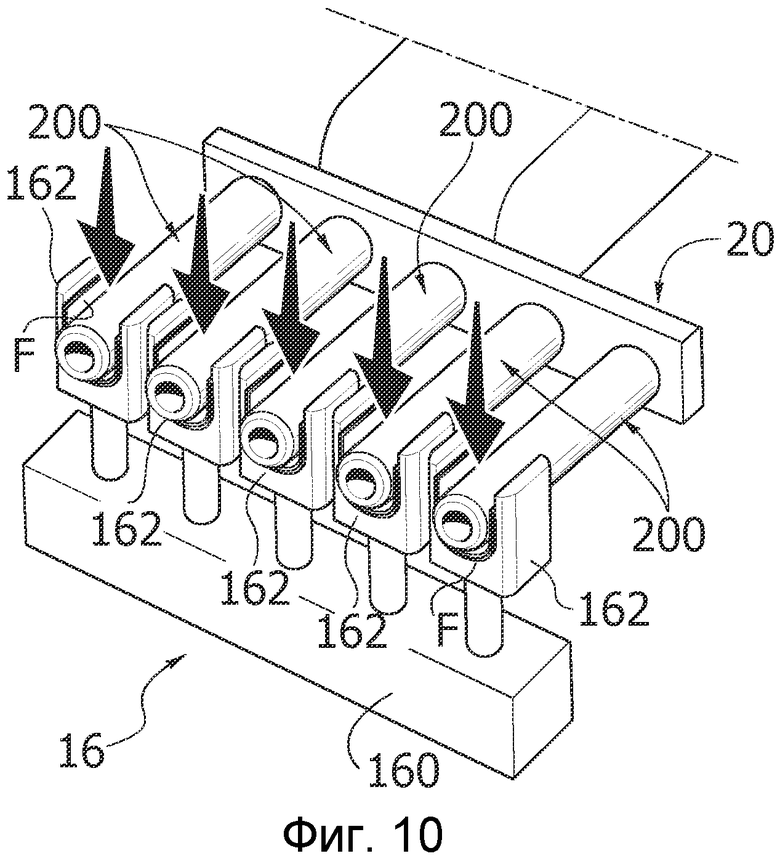
Независимо от структуры приемного узла 16, как схематично проиллюстрировано на фиг. 9, элементы F (и/или F'), принятые во впадинах 164 приемных конструкций 162 и согнутые согласно в целом U-образной конфигурации, могут быть перемещены "рукой" 20 дополнительного захватывающего узла (он также может быть антропоморфным роботом известного типа, не полностью видимым на фигурах), управляемым блоком K.
Рука 20 применяет множество захватывающих узлов 200 в форме прямых пальцев, размещенных бок о бок, которые проходят от основной части руки 20, размещаясь, примыкая друг к другу согласно конфигурации вилки. Как схематично проиллюстрировано на фиг. 10, рука 20 может быть приведена в действие (узлом K) таким образом, что захватывающие пальцы 200 могут проникать во впадины 164 приемных конструкций 162 за счет перемещения в поперечном направлении в отношении их длины, причем каждое окончание вставляется в петлевую часть соответствующего элемента F.
В различных вариантах осуществления захватывающие пальцы 200 могут иметь на своих дальних концах захватывающие узлы, предназначенные для того, чтобы "удержать" U-образно свернутые элементы F (и/или F'), которые расположены во впадинах 164.
Например, на фиг. 9 проиллюстрирован тот факт, что в различных вариантах осуществления пальцы 200 могут иметь отверстия 204, также предназначенные для соединения аналогично тому, как это осуществлено для вакуумных захватывающих узлов 12 (и 120) руки, описанных ранее, с источником давления ниже атмосферного (не показан на чертежах), чтобы опять же предусматривать вакуумное действие захвата/фиксации.
В различных вариантах осуществления, в частности, когда необходимо захватить два наложенных U-образно сложенных элемента F и F', расположенных во впадинах 164, на дальних концах пальцев 200 может быть предусмотрена конструкция 204' удерживателя (одна из которых схематично проиллюстрирована пунктирной линией на фиг. 12), способная фиксировать и "удержать" пару U-образно сложенных элементов F и F', расположенных во впадинах 164, функционируя на их границах, слегка выступающих из углублений 164.
Блок К работает таким образом, что, как только пальцы 200 вставляются во впадины конструкций 162 (см. последовательность фиг. 9 и 10), захватывающие узлы 204 и 204' активируются таким образом, чтобы удерживать элементы F (и/или F').
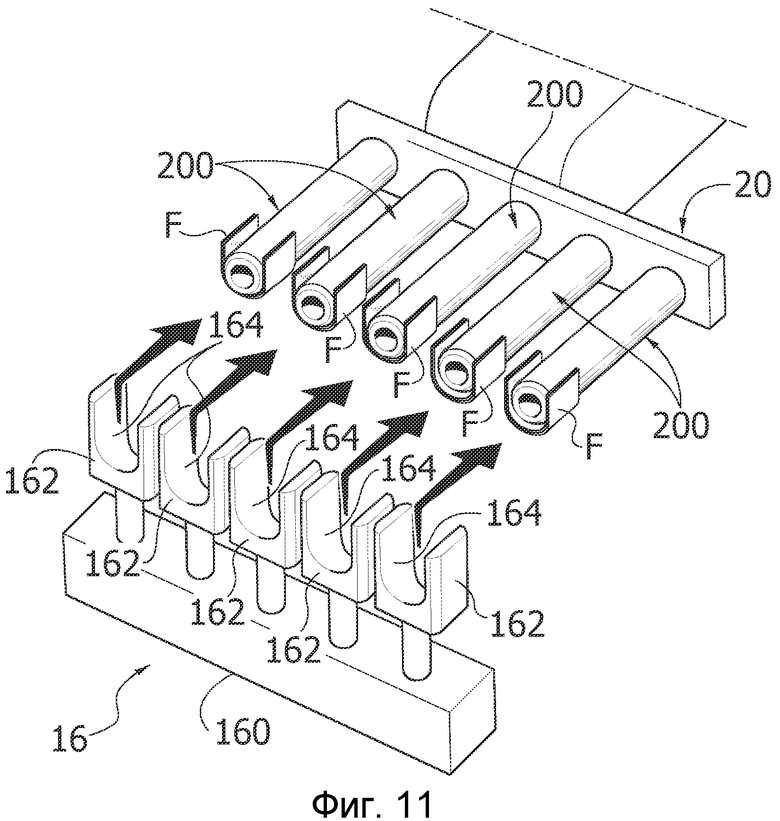
На этом этапе блок К может осуществить приведение в действие робота, переносящего руку 20 так, чтобы поднять руку 20, удалив ее от узла 16 (см. фиг. 11), посредством чего захватывающие пальцы 200 руки 20 также могут переносить элементы F (и/или F').
На этом этапе для узла 16 доступно преобразование (если необходимо вернуть приемные конструкции 162 в начальное состояние, представленное на фиг. 4, после вращения) так, чтобы иметь возможность приема следующих элементов F (и/или F'), тем временем захваченных рукой 10 из снабжающего массива согласно способам, проиллюстрированным ранее, обращаясь к фиг. 1-3.
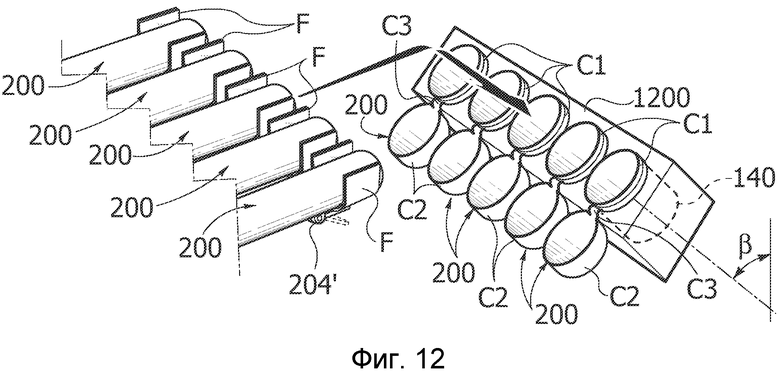
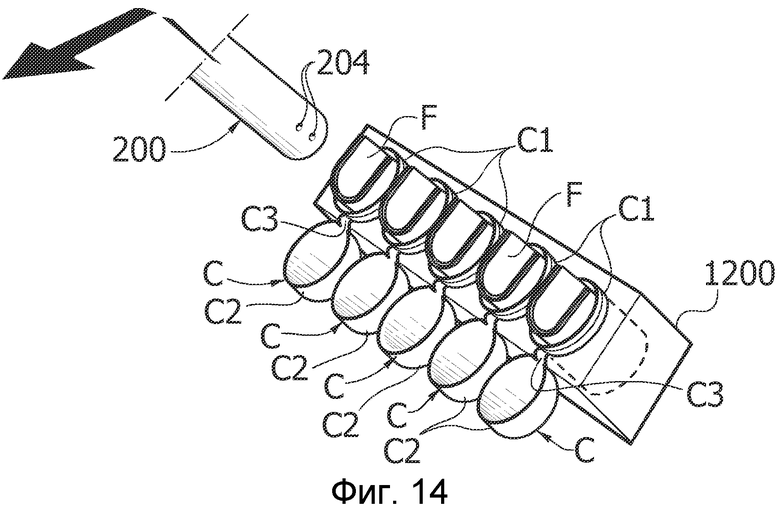
Как проиллюстрировано на фиг. 12, рука 20 с элементами F (и/или F': для простоты в последующем описании ссылка будет даваться лишь к элементам F), захваченными во впадинах 164 узла 16, двигается вперед по направлению к соответствующему массиву контейнеров С.
Пальцы 200 руки 20, которые на их дальних концах несут элементы F, таким образом, могут проникнуть в полости основных частей С1 контейнеров С, вставляя в каждый один из них соответствующий элемент F в сложенном состоянии.
Все это гарантирует то, что благодаря сложенному состоянию, приобретенному ранее, элементы F не представляют собой препятствие для дополнительного наполнения основных частей C1 дополнительными элементами изделия развлечения (так называемым "сюрпризом"), предназначенным для вставки в контейнер С.
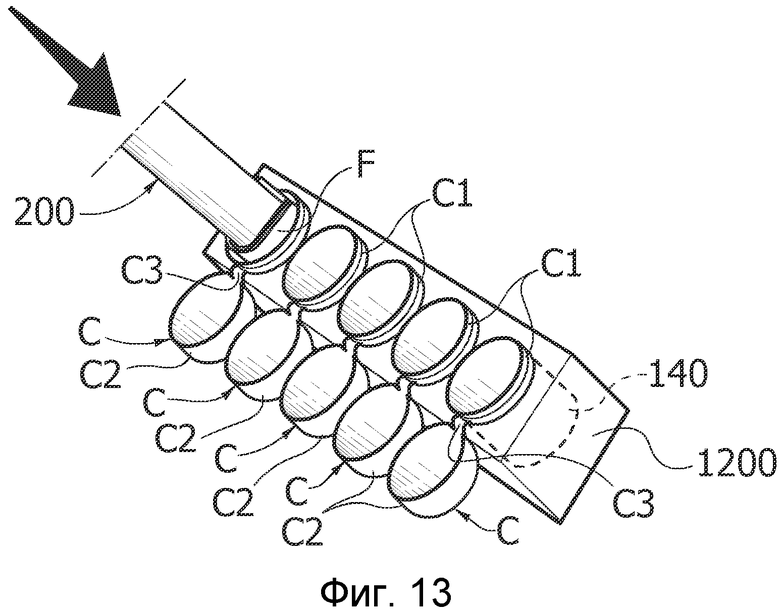
Последовательность по вставке элементов F в контейнеры С (для простоты, наглядности и ясности на фиг. 13 и 14 проиллюстрирована последовательность, обращаясь лишь к пальцу 200, переносящему соответствующий элемент F) предусмотрена для:
- проникновения пальцев 200, переносящих элементы F на их дальнем конце, в полости основных частей С1 контейнеров С, и
- деактивизации захватывающих узлов 204 или 204', чтобы позволить пальцам 200 высвободить элементы F; последние, таким образом, остаются в контейнерах С, когда рука 20 возвращается, удаляясь от блока 1200, где в контейнерах находятся элементы F, вставленные в них.
Как видно на фиг. 12 и 14, в целях облегчения операции по вставке пальцев 200 и элементов F, переносимых ими, в контейнеры С, блок 1200, в который вставлены основные части С1 (в соответствующие полости 140), может быть наклонен вперед (на угол β - см. фиг. 12) по направлению к руке 20, переносящей пальцы 200. Такой наклон вперед, который также может быть наклоном в горизонтальное состояние, облегчает движение для ввода пальцев 200 в контейнеры С.
Элементы F могли быть наделены упругой памятью до некоторой степени, посредством чего после высвобождения от пальцев 200 в полости контейнеров С они имеют тенденцию по меньшей мере частично "расширяться", т.е. отклоняться в отношении U-образной конфигурации, приданной им в результате вставки во впадины 164 приемных конструкций 162.
Расширяясь в контейнерах С, элементы F оставляют больше пространства, доступного для вставки, например, сюрприза или компонентов сюрприза, предназначенных для вставки в контейнер С. Последние вставляются в контейнеры С в последующих обрабатывающих операциях, выполняемых известным образом и не представляющих конкретную цель настоящего описания.
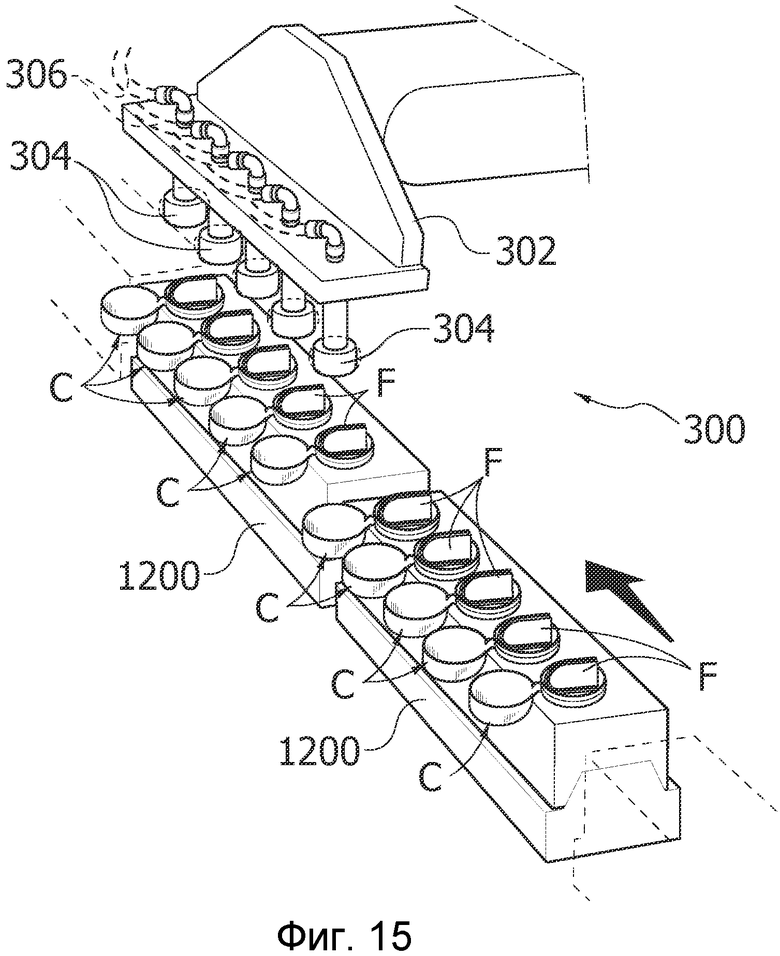
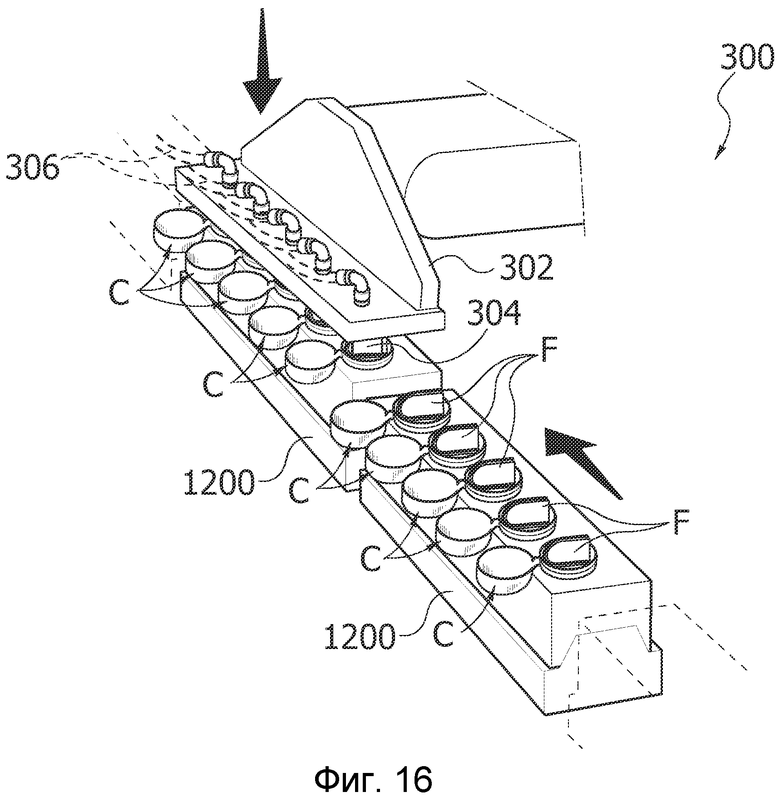
Упомянутое выше явление расширения может быть положительно акцентировано за счет обеспечения дополнительного обрабатывающего устройства 300 (фиг. 15 и 16), включающего конструкцию 302, подходящую для избирательного опускания (под действием известного типа приводов, не показанных на чертежах) по направлению к контейнерам С для того, чтобы ввести внутрь буферы 304, переносимые на нижней части конструкции 302. В различных вариантах осуществления буферы 304 соединены с одной из нескольких линий 306 давления, таким образом, они могут быть надуты.
После приведения в действие перемещения вниз конструкции 302 (см. последовательность фиг. 15 и 16) блок К также приводит в действие питание буферов 304, которые надуваются, и при вставке в полости отдельных контейнеров С расширяются, толкая элементы F (и/или F') по направлению к периферийной стенке контейнера С.
Возможное использование буферов 304, которые опускаются в контейнеры С с элементами F (и/или F'), может иметь эффект дополнительного вталкивания элементов F (и/или F') в контейнеры С, препятствуя таким элементам избыточно выступать вверх за край входного отверстия контейнеров, что может мешать вставке дополнительных элементов (например, "сюрпризов", возможно, изготовленных из нескольких частей) в контейнеры С.
В заключение, должно быть замечено, что ссылка к "рукам" 10 и 20, снабженным захватывающими узлами пневматического типа, в частности вакуумного типа (присосами 12, отверстиями 204), выполнена строго в целях пояснения на примере. Такие операции захвата могут фактически выполняться, используя эквивалентные узлы, например, удерживающее устройство.
Очевидно, что без ущерба для принципа изобретения, исключительно в качестве неограничивающего примера, детали и варианты осуществления могут также существенно изменяться в отношении тех, которые были описаны в материалах настоящей заявки, не отступая от объема изобретения, как определено приложенной формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБОТ-ПЫЛЕСОС С ИЗВЛЕКАЕМЫМ КОНТЕЙНЕРОМ ДЛЯ ПЫЛИ | 2013 |
|
RU2619004C2 |
| УСТРОЙСТВО ДЛЯ ЗАМЕНЫ РАБОЧЕГО КОНЦА СВАРОЧНОГО ЭЛЕКТРОДА | 2014 |
|
RU2605728C2 |
| АВТОМАТИЧЕСКИЕ ИНЪЕКЦИОННЫЕ УСТРОЙСТВА, ИМЕЮЩИЕ НАФОРМОВАННЫЕ ПОВЕРХНОСТИ ЗАХВАТА | 2012 |
|
RU2727040C2 |
| АВТОМАТИЧЕСКИЕ ИНЪЕКЦИОННЫЕ УСТРОЙСТВА, ИМЕЮЩИЕ НАФОРМОВАННЫЕ ПОВЕРХНОСТИ ЗАХВАТА | 2012 |
|
RU2602039C2 |
| НАБОР С ИЗДЕЛИЕМ ДЛЯ РАЗВЛЕЧЕНИЯ И СООТВЕТСТВУЮЩИЙ СПОСОБ | 2010 |
|
RU2519894C2 |
| СБОРНАЯ БУТЫЛКА | 2019 |
|
RU2788963C2 |
| УСТРОЙСТВО, СПОСОБ, КОНТЕЙНЕР И УПАКОВКА ДЛЯ УПАКОВЫВАНИЯ ПРОДУКТОВ ТЕТРАЭДРИЧЕСКОЙ ФОРМЫ | 2014 |
|
RU2656895C2 |
| МАНЖЕТА СФИГМОМАНОМЕТРА И СФИГМОМАНОМЕТР | 2007 |
|
RU2419382C2 |
| РОБОТИЗИРОВАННАЯ СИСТЕМА И СПОСОБ РАБОТЫ РОБОТИЗИРОВАННОЙ СИСТЕМЫ | 2016 |
|
RU2710411C2 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ В РАЗБРЫЗГИВАТЕЛЬ ЖИДКОГО ПОКРЫВАЮЩЕГО ПРОДУКТА | 2014 |
|
RU2678152C2 |

Устройство для вставки листовых элементов в контейнер содержит первый захватывающий узел для захвата листового элемента, передаточное устройство, содержащее одну приемную впадину для приема вставляемого в нее первого захватывающего узла, посредством чего листовой элемент, переносимый захватывающим узлом, принимает U-образную форму в результате вставки во впадину и второй захватывающий узел с пальцевидной формой для вставки во впадину для захвата из нее листового элемента U-образной формы. При этом второй узел является мобильным для вставки в контейнер листового элемента. В способе, осуществляемом устройством, захватывают листовой элемент, вставляют его в приемную впадину, посредством чего листовой элемент принимает U-образную форму. Затем захватывают листовой элемент из впадины и вставляют в контейнер. Группа изобретений обеспечивает упрощение изготовления. 2 н. и 13 з.п. ф-лы, 16 ил.
1. Устройство для вставки листовых элементов (F; F') в контейнер (С), включающее по меньшей мере один первый захватывающий узел (12; 120) для захвата по меньшей мере одного листового элемента (F; F') в плоском состоянии, отличающееся тем, что оно включает:
- передаточное устройство (16), включающее по меньшей мере одну приемную впадину (164) для приема вставляемого в нее упомянутого по меньшей мере одного первого захватывающего узла (12; 120), посредством чего листовой элемент (F; F'), переносимый упомянутым по меньшей мере одним первым захватывающим узлом (12; 120) в плоском состоянии, принимает U-образную форму в результате вставки в упомянутую приемную впадину (164), и
- по меньшей мере один второй захватывающий узел (200) с пальцевидной формой для вставки в упомянутую приемную впадину (164) для захвата из упомянутой приемной впадины (164) по меньшей мере одного листового элемента (F; F') с упомянутой U-образхной формой, причем по меньшей мере один второй захватывающий узел (200) является также мобильным для вставки в упомянутый контейнер (С), чтобы вставить упомянутый листовой элемент (F; F') в упомянутый контейнер (С).
2. Устройство по п.1, в котором упомянутая приемная впадина (164) является избирательно поворачиваемой между:
- первым угловым положением для приема вставляемого в нее упомянутого по меньшей мере одного первого захватывающего узла (12; 120), и
- вторым угловым положением для вставки упомянутого по меньшей мере одного второго захватывающего узла (200) в упомянутую приемную впадину (164).
3. Устройство по п.2, в котором упомянутое первое угловое положение и упомянутое второе угловое положение разнесены на 90° между ними.
4. Устройство по п.1, включающее множество упомянутых приемных впадин (164), ориентированных или приспособленных для ориентирования бок о бок для совместного определения зубчатого или бойничного расположения.
5. Устройство по п.1, в котором с упомянутой по меньшей мере одной приемной впадиной (164) соединено удерживающее средство, предпочтительно вакуумное удерживающее средство (163), для удерживания в упомянутой по меньшей мере одной приемной впадине (164) U-образного листового элемента (F; F').
6. Устройство по п.1, в котором по меньшей мере один из упомянутого по меньшей мере одного первого захватывающего узла (12; 120) и упомянутого по меньшей мере одного второго захватывающего узла (200) представляет собой вакуумное захватывающее устройство.
7. Устройство по п.1, в котором по меньшей мере один, а предпочтительно оба, из упомянутого по меньшей мере одного первого захватывающего узла (12; 120) и упомянутого по меньшей мере одного второго захватывающего узла (200) переносятся манипуляторным устройством, например роботом.
8. Устройство по п.1, включающее опорный элемент (1200) для приема упомянутого контейнера (С), причем упомянутый элемент (1200) является избирательно наклоняемым (β) по направлению к упомянутому по меньшей мере одному второму захватывающему узлу (200) для облегчения вставки упомянутого по меньшей мере одного второго захватывающего узла (200) в упомянутый контейнер (С).
9. Устройство по п.1, в котором с упомянутым по меньшей мере одним первым захватывающим узлом (12; 120) связан просмотровой блок (14) для детектирования правильности захвата упомянутого по меньшей мере одного листового элемента (F; F') упомянутым по меньшей мере одним первым захватывающим узлом (12; 120), причем по меньшей мере один первый захватывающий узел (12; 120) является приводимым в действие (К) для высвобождения листового элемента (F; F'), захваченного способом, детектированным упомянутым просмотровым блоком (14) как неверный.
10. Устройство по п.1, включающее распределяющее устройство (300) для упомянутого по меньшей мере одного листового элемента (F; F'), включающее по меньшей мере один буфер (304), предпочтительно расширяющегося типа (306), для введения в листовой элемент (F; F') после вставки в упомянутый контейнер (С) для подгонки упомянутого листового элемента (F; F') относительно стенки упомянутого контейнера (С).
11. Устройство по любому из предшествующих пунктов, сконфигурированное для вставки множества листовых элементов (F; F') в соответствующие контейнеры (С) и включающее соответствующие множества упомянутых первых захватывающих узлов (12), упомянутых приемных впадин (164) и упомянутых вторых захватывающих узлов (200).
12. Устройство по п.1, в котором упомянутый по меньшей мере один первый захватывающий узел включает два захватывающих узла (12; 120), расположенных на концах двух ответвлений L-образной конфигурации.
13. Способ вставки листовых элементов (F; F') в контейнер (С), включающий захват (12, 120) по меньшей мере одного листового элемента (F; F') в плоском состоянии, отличающийся тем, что включает:
- вставку упомянутого по меньшей мере одного листового элемента (F; F') в плоском состоянии в приемную впадину (164), посредством чего упомянутый по меньшей мере один листовой элемент (F; F') принимает U-образную форму в результате вставки в упомянутую приемную впадину (164),
захват (200) упомянутого листового элемента (F; F') из упомянутой приемной впадины (164), и
вставку в упомянутый контейнер (С) упомянутого листового элемента (F; F'), захваченного из упомянутой приемной впадины (164).
14. Способ по п.13, включающий удерживание в упомянутой приемной впадине (164), предпочтительно вакуумным удерживающим средством (163), листового элемента (F; F') с упомянутой U-образной формой.
15. Способ по п.13, в котором упомянутый по меньшей мере один первый захватывающий узел включает в себя два захватывающих узла (12; 120), расположенных на концах двух ответвлений L-образной конфигурации, причем способ включает захват упомянутого по меньшей мере одного листового элемента в плоском состоянии, в качестве альтернативы, одним (12) или другим (120) из упомянутых захватывающих элементов (12, 120).
| Устройство для гидросбива окалины с нагретых заготовок | 1976 |
|
SU611699A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ РАЗМЕРОВ И СКРУЧИВАНИЯ ПЛОСКИХ ТЕЛ | 1998 |
|
RU2189933C2 |
| Устройство для моделирования сетевого графика | 1976 |
|
SU631934A1 |

